
Linear’Regression’ - Carnegie Mellon School of ... · PDF file– Model •...
55
Linear Regression 1 Matt Gormley Lecture 5 September 14, 2016 School of Computer Science Readings: Bishop, 3.1 10601 Introduction to Machine Learning
Transcript of Linear’Regression’ - Carnegie Mellon School of ... · PDF file– Model •...

Linear Regression
1
Matt Gormley Lecture 5
September 14, 2016
School of Computer Science
Readings: Bishop, 3.1
10-‐601 Introduction to Machine Learning

Reminders
• Homework 2: – Extension: due Friday (9/16) at 5:30pm
• Recitation schedule posted on course website
2

Outline • Linear Regression
– Simple example – Model
• Learning – Gradient Descent – SGD – Closed Form
• Advanced Topics – Geometric and Probabilistic Interpretation of LMS – L2 Regularization – L1 Regularization – Features
3
Outline • Linear Regression
– Simple example – Model
• Learning (aka. Least Squares) – Gradient Descent – SGD (aka. Least Mean Squares (LMS)) – Closed Form (aka. Normal Equations)
• Advanced Topics – Geometric and Probabilistic Interpretation of LMS – L2 Regularization (aka. Ridge Regression) – L1 Regularization (aka. LASSO) – Features (aka. non-‐linear basis functions)
4

• Our goal is to estimate w from a training data of <xi,yi> pairs
• Optimization goal: minimize squared error (least squares):
• Why least squares?
- minimizes squared distance between measurements and predicted line
- has a nice probabilistic interpretation
- the math is pretty
Linear regression
∑ −i
iiw wxy 2)(minargX
Y ε+= wxy
see HW

Solving linear regression
• To optimize – closed form:
• We just take the derivative w.r.t. to w and set to 0:
∂∂w
(yi −wxi )2
i∑ = 2 −xi (yi −wxi )
i∑ ⇒
2 xi (yi −wxi ) = 0i∑ ⇒
xiyi = wxi2
i∑
i∑ ⇒
w =xiyi
i∑
xi2
i∑
2 xiyii∑ − 2 wxixi
i∑ = 0
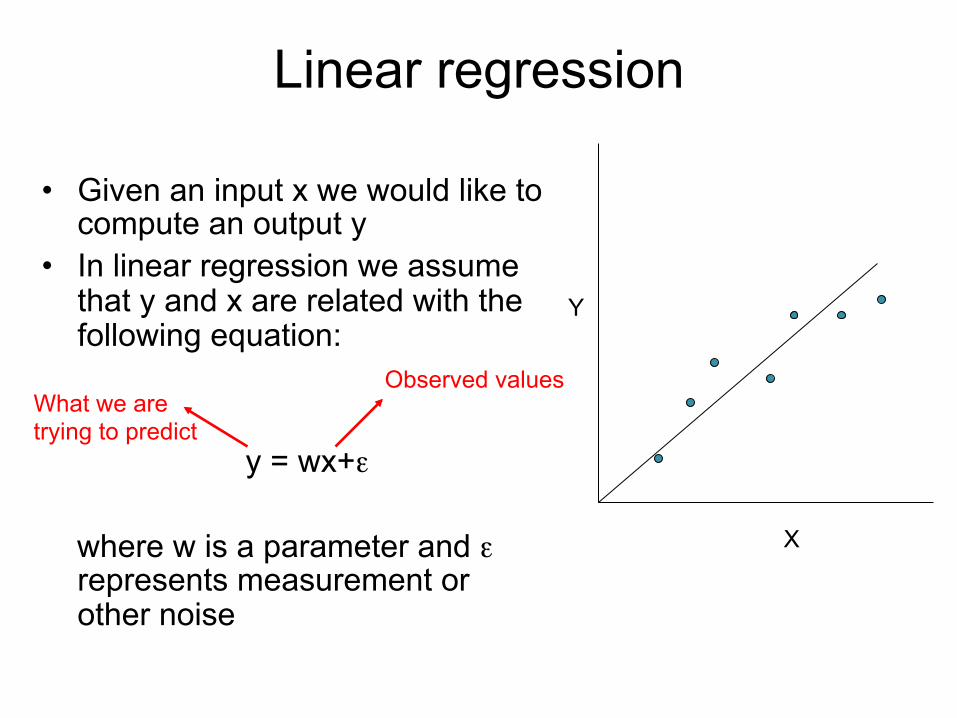
Linear regression
• Given an input x we would like to compute an output y
• In linear regression we assume that y and x are related with the following equation:
y = wx+ε where w is a parameter and ε
represents measurement or other noise
X
Y
What we are trying to predict
Observed values

Regression example
• Generated: w=2 • Recovered: w=2.03 • Noise: std=1

Regression example
• Generated: w=2 • Recovered: w=2.05 • Noise: std=2

Regression example
• Generated: w=2 • Recovered: w=2.08 • Noise: std=4

Bias term • So far we assumed that the
line passes through the origin • What if the line does not? • No problem, simply change the
model to y = w0 + w1x+ε • Can use least squares to
determine w0 , w1
n
xwyw i
ii∑ −=
1
0
X
Y
w0
∑
∑ −=
ii
iii
x
wyxw 2
0
1
)(
Linear Regression
12
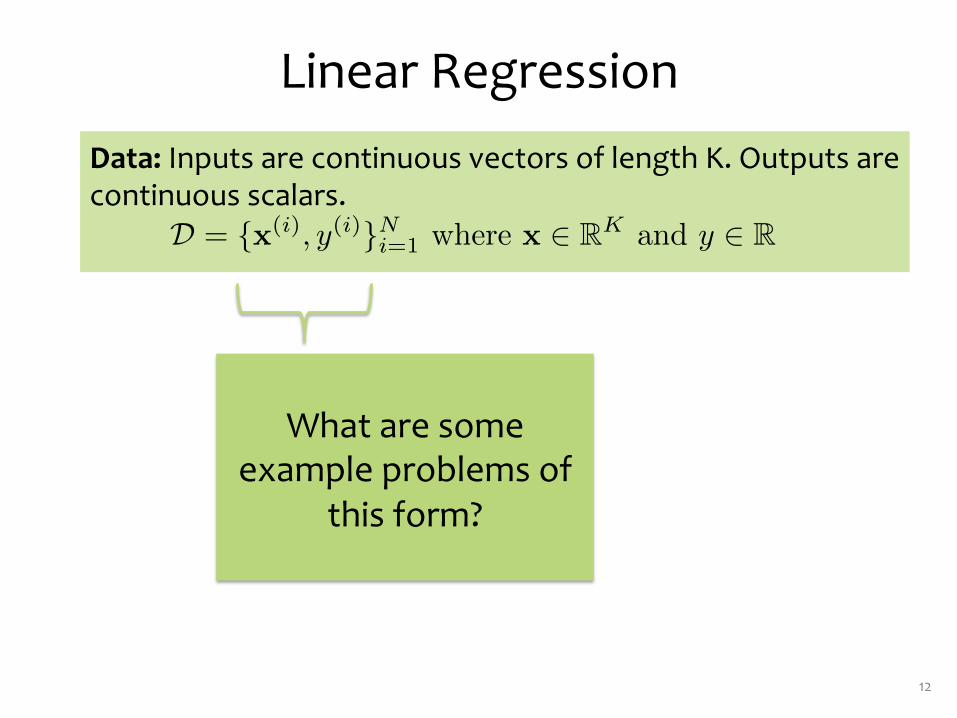
Data: Inputs are continuous vectors of length K. Outputs are continuous scalars.
D = {x(i), y(i)}Ni=1 where x � RK and y � R
What are some example problems of
this form?

Linear Regression
13
Data: Inputs are continuous vectors of length K. Outputs are continuous scalars.
D = {x(i), y(i)}Ni=1 where x � RK and y � R
Prediction: Output is a linear function of the inputs. y = h�(x) = �1x1 + �2x2 + . . . + �KxK
y = h�(x) = �T x (We assume x1 is 1)
Learning: finds the parameters that minimize some objective function.
�� = argmin�
J(�)

Least Squares
14
Learning: finds the parameters that minimize some objective function. We minimize the sum of the squares: Why?
1. Reduces distance between true measurements and predicted hyperplane (line in 1D)
2. Has a nice probabilistic interpretation
�� = argmin�
J(�)
J(�) =1
2
N�
i=1
(�T x(i) � y(i))2

Least Squares
15
Learning: finds the parameters that minimize some objective function. We minimize the sum of the squares: Why?
1. Reduces distance between true measurements and predicted hyperplane (line in 1D)
2. Has a nice probabilistic interpretation
�� = argmin�
J(�)
J(�) =1
2
N�
i=1
(�T x(i) � y(i))2This is a very general optimization setup. We could solve it in lots of ways. Today, we’ll consider three
ways.

Least Squares
16
Learning: Three approaches to solving
Approach 2: Stochastic Gradient Descent (SGD) (take many small steps opposite the gradient)
Approach 1: Gradient Descent (take larger – more certain – steps opposite the gradient)
Approach 3: Closed Form (set derivatives equal to zero and solve for parameters)
�� = argmin�
J(�)

Gradient Descent
17
Algorithm 1 Gradient Descent
1: procedure GD(D, �(0))2: � � �(0)
3: while not converged do4: � � � + ���J(�)
5: return �
In order to apply GD to Linear Regression all we need is the gradient of the objective function (i.e. vector of partial derivatives).
��J(�) =
�
����
dd�1
J(�)d
d�2J(�)...
dd�N
J(�)
�
����

Gradient Descent
18
Algorithm 1 Gradient Descent
1: procedure GD(D, �(0))2: � � �(0)
3: while not converged do4: � � � + ���J(�)
5: return �
There are many possible ways to detect convergence. For example, we could check whether the L2 norm of the gradient is below some small tolerance.
||��J(�)||2 � �Alternatively we could check that the reduction in the objective function from one iteration to the next is small.

Stochastic Gradient Descent (SGD)
19
Algorithm 2 Stochastic Gradient Descent (SGD)
1: procedure SGD(D, �(0))2: � � �(0)
3: while not converged do4: for i � shu�e({1, 2, . . . , N}) do5: � � � + ���J (i)(�)
6: return �
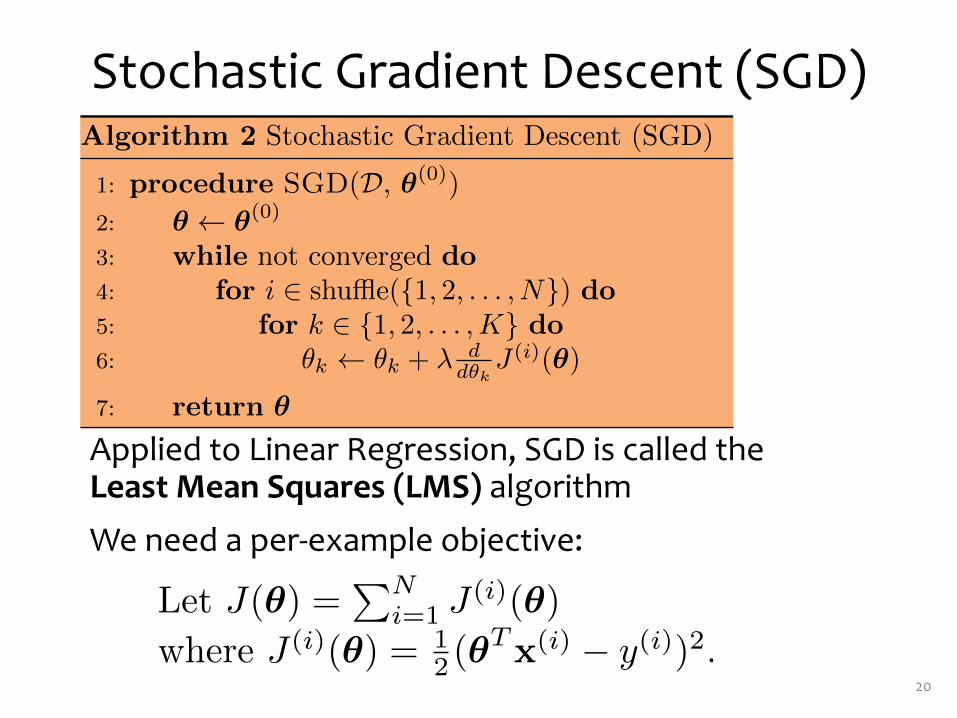
We need a per-‐example objective:
Let J(�) =�N
i=1 J (i)(�)where J (i)(�) = 1
2 (�T x(i) � y(i))2.
Applied to Linear Regression, SGD is called the Least Mean Squares (LMS) algorithm
Stochastic Gradient Descent (SGD)
We need a per-‐example objective:
20
Let J(�) =�N
i=1 J (i)(�)where J (i)(�) = 1
2 (�T x(i) � y(i))2.
Applied to Linear Regression, SGD is called the Least Mean Squares (LMS) algorithm
Algorithm 2 Stochastic Gradient Descent (SGD)
1: procedure SGD(D, �(0))2: � � �(0)
3: while not converged do4: for i � shu�e({1, 2, . . . , N}) do5: for k � {1, 2, . . . , K} do6: �k � �k + � d
d�kJ (i)(�)
7: return �

Stochastic Gradient Descent (SGD)
We need a per-‐example objective:
21
Let J(�) =�N
i=1 J (i)(�)where J (i)(�) = 1
2 (�T x(i) � y(i))2.
Applied to Linear Regression, SGD is called the Least Mean Squares (LMS) algorithm
Algorithm 2 Stochastic Gradient Descent (SGD)
1: procedure SGD(D, �(0))2: � � �(0)
3: while not converged do4: for i � shu�e({1, 2, . . . , N}) do5: for k � {1, 2, . . . , K} do6: �k � �k + � d
d�kJ (i)(�)
7: return �
Let’s start by calculating this partial derivative for the Linear Regression objective function.

Partial Derivatives for Linear Reg.
22
d
d�kJ (i)(�) =
d
d�k
1
2(�T x(i) � y(i))2
=1
2
d
d�k(�T x(i) � y(i))2
= (�T x(i) � y(i))d
d�k(�T x(i) � y(i))
= (�T x(i) � y(i))d
d�k(
K�
k=1
�kx(i)k � y(i))
= (�T x(i) � y(i))x(i)k
Let J(�) =�N
i=1 J (i)(�)where J (i)(�) = 1
2 (�T x(i) � y(i))2.

Partial Derivatives for Linear Reg.
23
Let J(�) =�N
i=1 J (i)(�)where J (i)(�) = 1
2 (�T x(i) � y(i))2.
d
d�kJ (i)(�) = (�T x(i) � y(i))x(i)
k
d
d�kJ(�) =
d
d�k
N�
i=1
J (i)(�)
=N�
i=1
(�T x(i) � y(i))x(i)k
Used by SGD (aka. LMS)
Used by Gradient Descent

Least Mean Squares (LMS)
24
Applied to Linear Regression, SGD is called the Least Mean Squares (LMS) algorithm
Algorithm 3 Least Mean Squares (LMS)
1: procedure LMS(D, �(0))2: � � �(0)
3: while not converged do4: for i � shu�e({1, 2, . . . , N}) do5: for k � {1, 2, . . . , K} do
6: �k � �k + �(�T x(i) � y(i))x(i)k
7: return �

Optimization for Linear Reg. vs. Logistic Reg.
• Can use the same tricks for both: – regularization – tuning learning rate on development data – shuffle examples out-‐of-‐core (if can’t fit in memory) and stream over them
– local hill climbing yields global optimum (both problems are convex)
– etc. • But Logistic Regression does not have a closed form solution for MLE parameters… …what about Linear Regression?
25

Least Squares
26
Learning: Three approaches to solving
Approach 2: Stochastic Gradient Descent (SGD) (take many small steps opposite the gradient)
Approach 1: Gradient Descent (take larger – more certain – steps opposite the gradient)
Approach 3: Closed Form (set derivatives equal to zero and solve for parameters)
�� = argmin�
J(�)
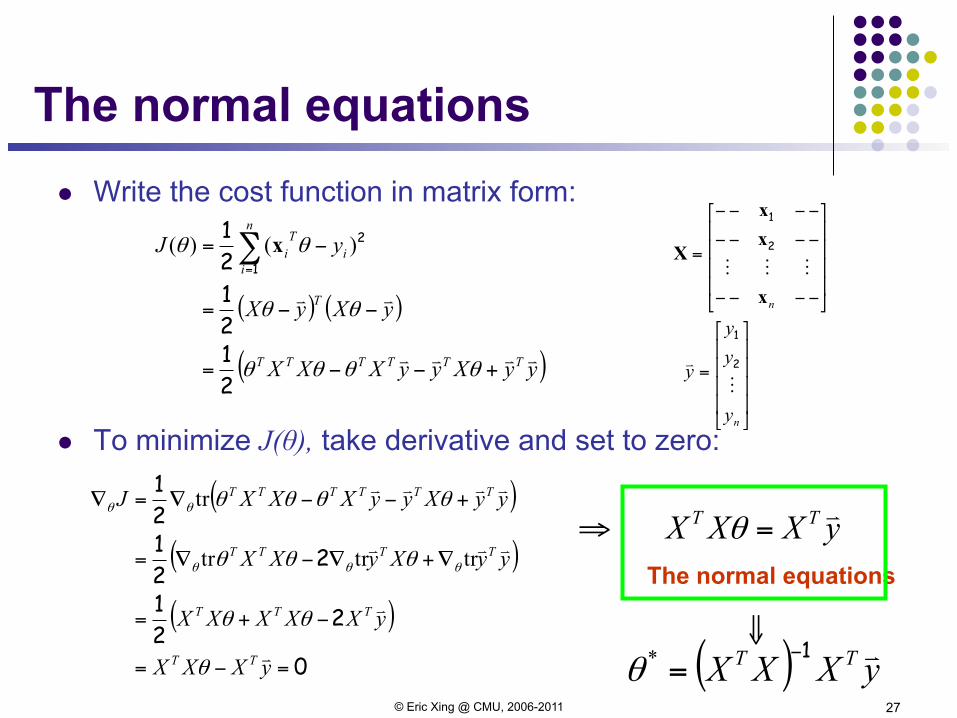
The normal equations l Write the cost function in matrix form:
l To minimize J(θ), take derivative and set to zero:
© Eric Xing @ CMU, 2006-2011 27
( ) ( )
( )yyXyyXXX
yXyX
yJ
TTTTTT
T
n
ii
Ti
!!!!
!!
+−−=
−−=
−= ∑=
θθθθ
θθ
θθ
212121
1
2)()( x
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
−−−−
−−−−
=
nx
xx
X!!!
2
1
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
ny
yy
y!
" 2
1
( )
( )
( )0
221
22121
=−=
−+=
∇+∇−∇=
+−−∇=∇
yXXX
yXXXXX
yyXyXX
yyXyyXXXJ
TT
TTT
TTTT
TTTTTT
!
!
!!!
!!!!
θ
θθ
θθθ
θθθθ
θθθ
θθ
trtrtr
tryXXX TT !
=⇒ θ The normal equations
( ) yXXX TT !1−=*θ
⇓

Some matrix derivatives l For , define:
l Trace:
l Some fact of matrix derivatives (without proof)
© Eric Xing @ CMU, 2006-2011 28
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂
∂
∂
∂
∂
=∇
fA
fA
fA
fA
Af
mnm
n
A
!
"#"
!
1
111
)(
RR !nmf ×:
, tr ∑=
=n
iiiAA
1, tr aa = BCACABABC trtrtr ==
, tr TA BAB =∇ , tr TTT
A ABCCABCABA +=∇ ( ) TA AAA 1−=∇

Comments on the normal equation
l In most situations of practical interest, the number of data points N is larger than the dimensionality k of the input space and the matrix X is of full column rank. If this condition holds, then it is easy to verify that XTX is necessarily invertible.
l The assumption that XTX is invertible implies that it is positive definite, thus the critical point we have found is a minimum.
l What if X has less than full column rank? à regularization (later).
© Eric Xing @ CMU, 2006-2011 29

Direct and Iterative methods l Direct methods: we can achieve the solution in a single step
by solving the normal equation l Using Gaussian elimination or QR decomposition, we converge in a finite number
of steps l It can be infeasible when data are streaming in in real time, or of very large
amount
l Iterative methods: stochastic or steepest gradient l Converging in a limiting sense l But more attractive in large practical problems l Caution is needed for deciding the learning rate α
© Eric Xing @ CMU, 2006-2011 30
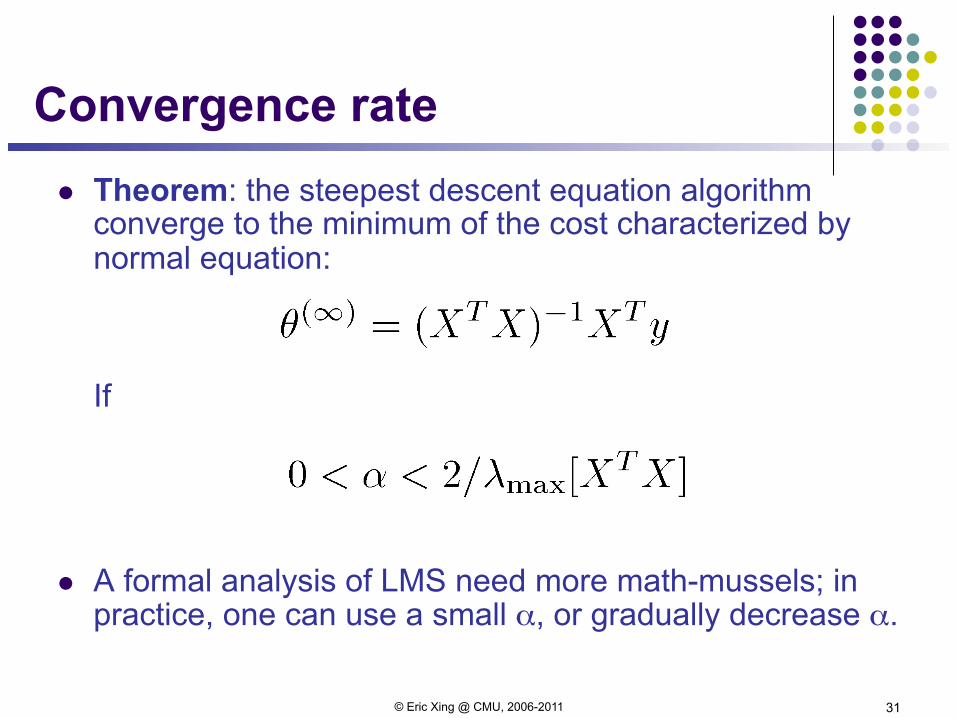
Convergence rate l Theorem: the steepest descent equation algorithm
converge to the minimum of the cost characterized by normal equation:
If
l A formal analysis of LMS need more math-mussels; in
practice, one can use a small α, or gradually decrease α.
© Eric Xing @ CMU, 2006-2011 31
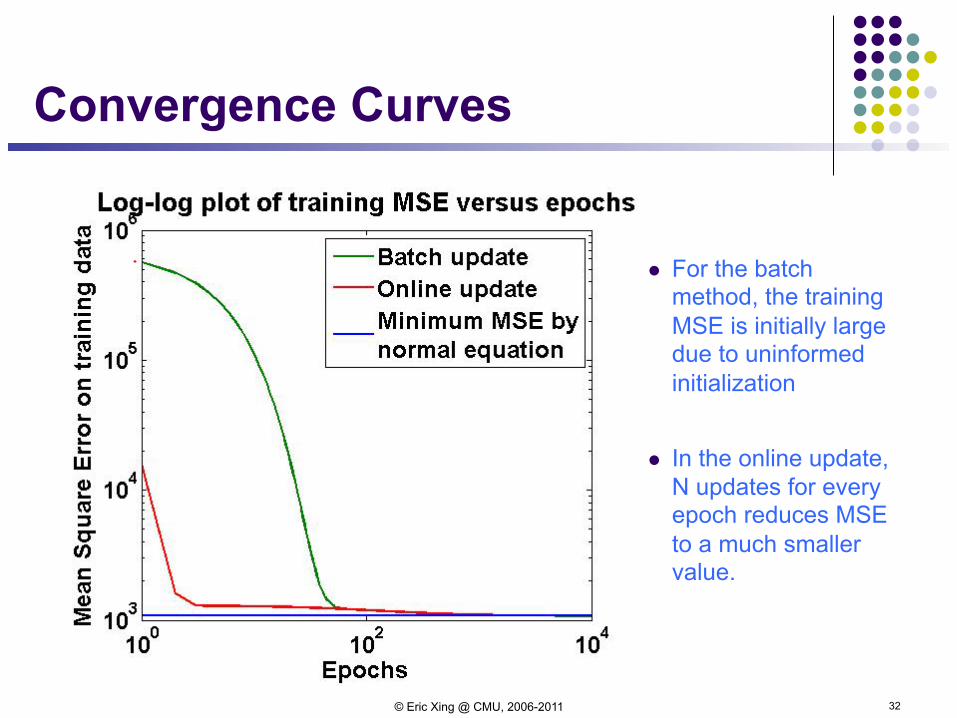
Convergence Curves
l For the batch method, the training MSE is initially large due to uninformed initialization
l In the online update, N updates for every epoch reduces MSE to a much smaller value.
32 © Eric Xing @ CMU, 2006-2011
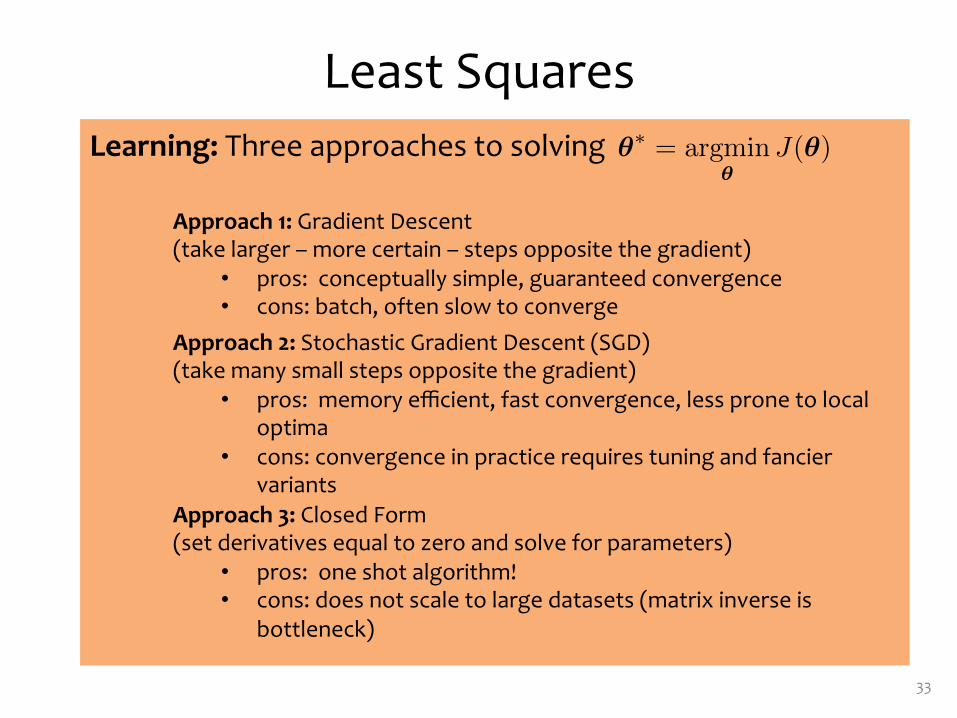
Least Squares
33
Learning: Three approaches to solving
Approach 2: Stochastic Gradient Descent (SGD) (take many small steps opposite the gradient)
• pros: memory efficient, fast convergence, less prone to local optima
• cons: convergence in practice requires tuning and fancier variants
Approach 1: Gradient Descent (take larger – more certain – steps opposite the gradient)
• pros: conceptually simple, guaranteed convergence • cons: batch, often slow to converge
Approach 3: Closed Form (set derivatives equal to zero and solve for parameters)
• pros: one shot algorithm! • cons: does not scale to large datasets (matrix inverse is
bottleneck)
�� = argmin�
J(�)

Matching Game
Goal: Match the Algorithm to its Update Rule
34
1. SGD for Logistic Regression
2. Least Mean Squares
3. Perceptron (next lecture)
4.
5.
6.
A. 1=5, 2=4, 3=6 B. 1=5, 2=6, 3=4 C. 1=6, 2=4, 3=4 D. 1=5, 2=6, 3=6 E. 1=6, 2=6, 3=6
�k � �k +1
1 + exp �(h�(x(i)) � y(i))
�k � �k + (h�(x(i)) � y(i))
�k � �k + �(h�(x(i)) � y(i))x(i)k
h�(x) = p(y|x)
h�(x) = �T x
h�(x) = sign(�T x)

Geometric Interpretation of LMS • The predictions on the training data are:
• Note that
and is the orthogonal projection of
into the space spanned by the columns of X
( ) yXXXXXy TT !! 1−== *ˆ θ
( )( )yIXXXXyy TT !!!−=−
−1ˆ
( ) ( )( )( )( )
0
1
1
=
−=
−=−−
−
yXXXXXX
yIXXXXXyyXTTTT
TTTT
!
!!!
!!
y! y!
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
−−−−
−−−−
=
nx
xx
X!!!
2
1
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
ny
yy
y!
" 2
1
35 © Eric Xing @ CMU, 2006-‐2011

Probabilistic Interpretation of LMS • Let us assume that the target variable and the inputs
are related by the equation:
where ε is an error term of unmodeled effects or random
noise
• Now assume that ε follows a Gaussian N(0,σ), then we have:
• By independence assumption:
iiT
iy εθ += x
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−= 2
2
221
σθ
σπθ
)(exp);|( iT
iii
yxyp x
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−⎟
⎠
⎞⎜⎝
⎛==
∑∏ =
=2
12
1 221
σ
θ
σπθθ
n
i iT
inn
iii
yxypL
)(exp);|()(
x
36 © Eric Xing @ CMU, 2006-‐2011
Probabilistic Interpretation of LMS, cont.
• Hence the log-‐likelihood is:
• Do you recognize the last term? Yes it is:
• Thus under independence assumption, LMS is equivalent to MLE of θ !
∑ =−−=
n
i iT
iynl1
22 211
21 )(log)( xθ
σσπθ
∑=
−=n
ii
Ti yJ
1
2
21 )()( θθ x
37 © Eric Xing @ CMU, 2006-‐2011

Ridge Regression
• Adds an L2 regularizer to Linear Regression
• Bayesian interpretation: MAP estimation with a Gaussian prior on the parameters
38
JRR(�) = J(�) + �||�||22
=1
2
N�
i=1
(�T x(i) � y(i))2 + �K�
k=1
�2k
�MAP = argmax�
N�
i=1
log p�(y(i)|x(i)) + log p(�)
= argmax�
JRR(�)where
p(�) � N (0,1�)

�MAP = argmax�
N�
i=1
log p�(y(i)|x(i)) + log p(�)
= argmax�
JLASSO(�)
JLASSO(�) = J(�) + �||�||1
=1
2
N�
i=1
(�T x(i) � y(i))2 + �K�
k=1
|�k|
LASSO
• Adds an L1 regularizer to Linear Regression
• Bayesian interpretation: MAP estimation with a Laplace prior on the parameters
39
where
p(�) � Laplace(0, f(�))

Ridge Regression vs Lasso
Ridge Regression: Lasso:
Lasso (l1 penalty) results in sparse solu2ons – vector with more zero coordinates Good for high-‐dimensional problems – don’t have to store all coordinates!
βs with constant l1 norm
βs with constant J(β) (level sets of J(β))
βs with constant l2 norm
β2
β1
40 © Eric Xing @ CMU, 2006-‐2011
X X

Non-Linear basis function • So far we only used the observed values x1,x2,… • However, linear regression can be applied in the same
way to functions of these values – Eg: to add a term w x1x2 add a new variable z=x1x2 so each
example becomes: x1, x2, …. z
• As long as these functions can be directly computed from the observed values the parameters are still linear in the data and the problem remains a multi-variate linear regression problem
ε++++= 22110 kk xwxwwy …

Non-linear basis functions
• What type of functions can we use? • A few common examples: - Polynomial: φj(x) = xj for j=0 … n - Gaussian: - Sigmoid:
- Logs:
€
φ j (x) =(x −µ j )2σ j
2
€
φ j (x) =1
1+ exp(−s j x)
Any function of the input values can be used. The solution for the parameters of the regression remains the same.
φ j (x) = log(x +1)

General linear regression problem • Using our new notations for the basis function linear
regression can be written as
• Where φj(x) can be either xj for multivariate regression or one of the non-linear basis functions we defined
• … and φ0(x)=1 for the intercept term €
y = w jφ j (x)j= 0
n
∑
An example: polynomial basis vectors on a small dataset
– From Bishop Ch 1

0th Order Polynomial
n=10

1st Order Polynomial

3rd Order Polynomial

9th Order Polynomial

Over-fitting
Root-Mean-Square (RMS) Error:

Polynomial Coefficients
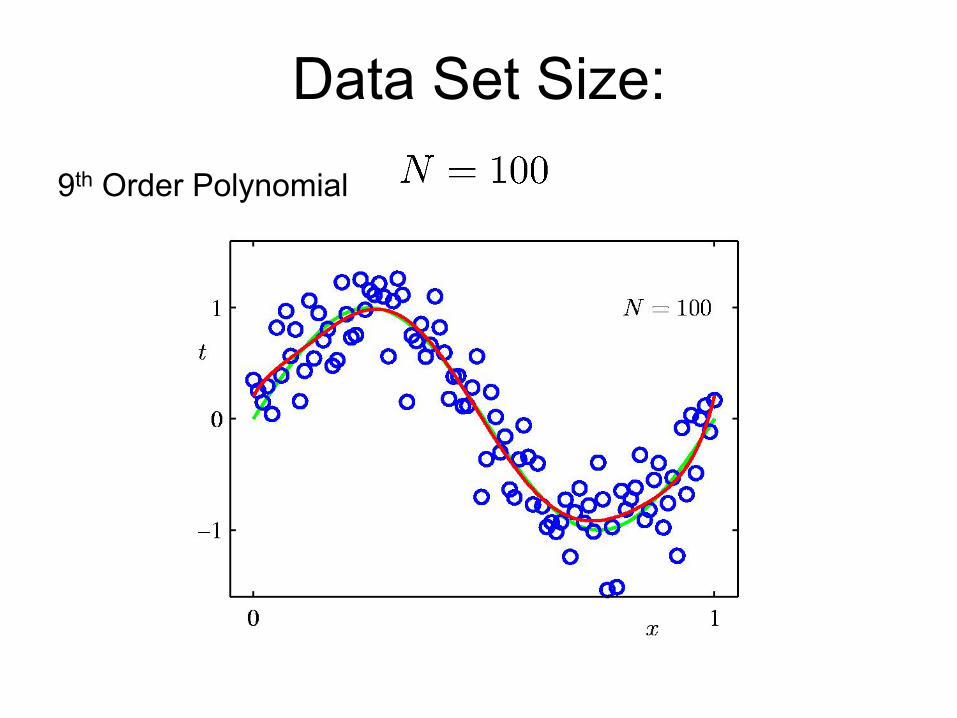
Data Set Size: 9th Order Polynomial

Regularization
Penalize large coefficient values
JX,y (w) =12
yi − wjφ j (xi )
j∑
#
$%%
&
'((
i∑
2
−λ2w 2

Regularization: +
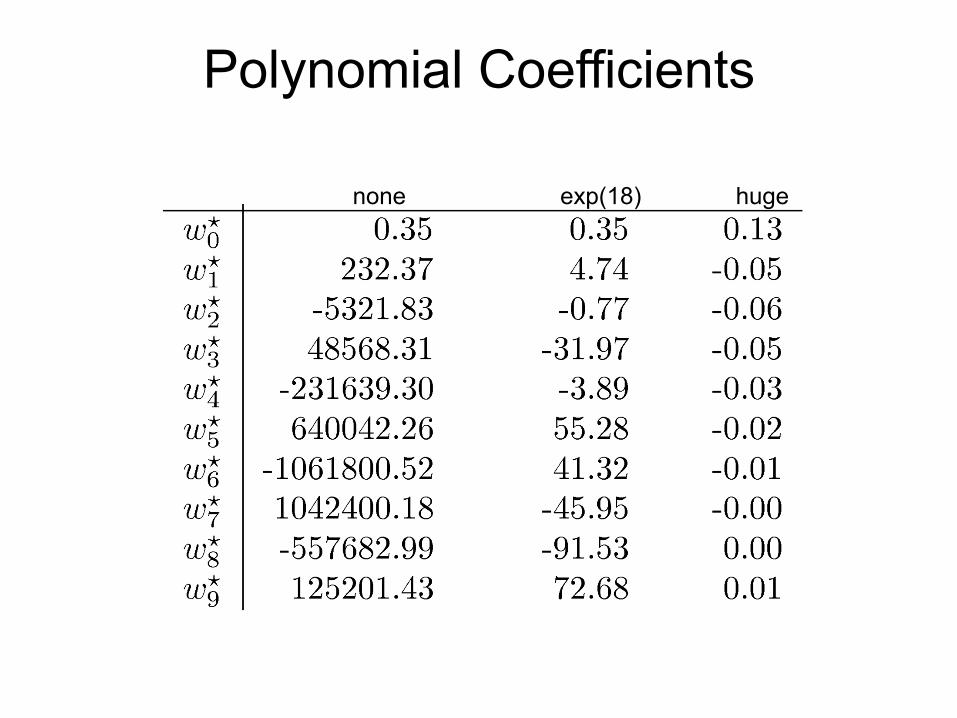
Polynomial Coefficients
none exp(18) huge

Over Regularization:


















