
Line Segment Intersection Computational Geometry, WS 2007/08 Lecture 3 – Supplementary Prof. Dr....
37
Line Segment Intersection Computational Geometry, WS 2007/08 Lecture 3 – Supplementary Prof. Dr. Thomas Ottmann Algorithmen & Datenstrukturen, Institut für Informatik Fakultät für Angewandte Wissenschaften Albert-Ludwigs-Universität Freiburg
-
Upload
edith-pear -
Category
Documents
-
view
230 -
download
2
Transcript of Line Segment Intersection Computational Geometry, WS 2007/08 Lecture 3 – Supplementary Prof. Dr....
Line Segment Intersection
Computational Geometry, WS 2007/08Lecture 3 – Supplementary
Prof. Dr. Thomas Ottmann
Algorithmen & Datenstrukturen, Institut für InformatikFakultät für Angewandte WissenschaftenAlbert-Ludwigs-Universität Freiburg
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 2
Line Segment Intersection: Additions
• Implementation of the event queue by a heap:
The complexity of heap construction
• Iso-oriented line segments• Intersection counting• Line segment intersection by Divide & Conquer
• Polygon intersection
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 3
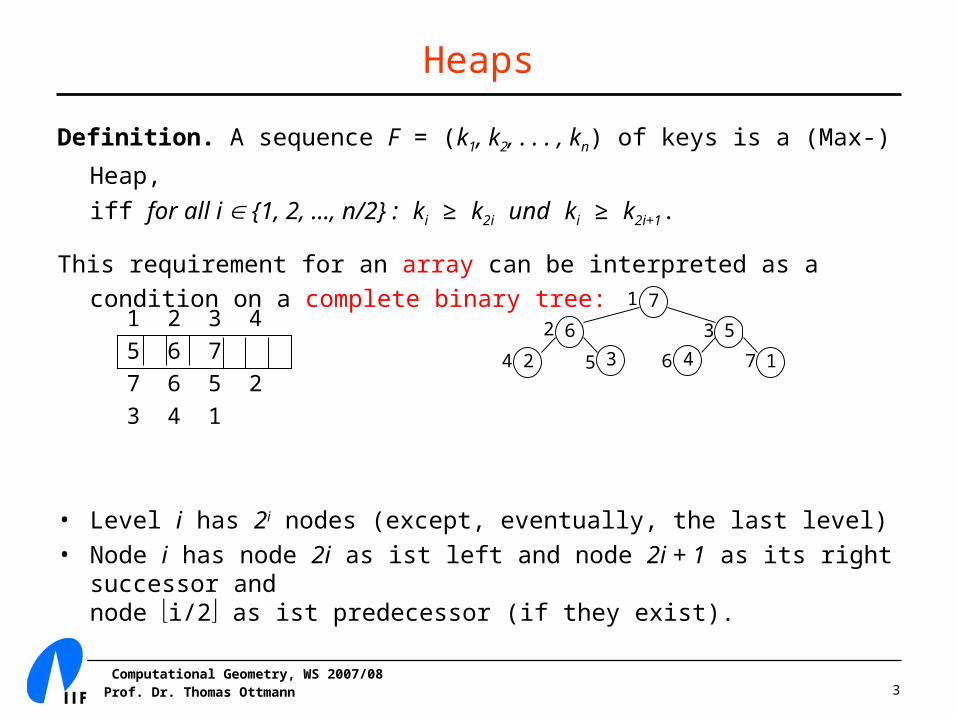
Heaps
Definition. A sequence F = (k1, k2, . . . , kn) of keys is a (Max-) Heap,
iff for all i {1, 2, …, n/2} : ki ≥ k2i und ki ≥ k2i+1.
This requirement for an array can be interpreted as a condition on a
complete binary tree:
• Level i has 2i nodes (except, eventually, the last level)• Node i has node 2i as ist left and node 2i + 1 as its right successor
andnode i/2 as ist predecessor (if they exist).
1 2 3 4 5 6 7
7 6 5 2 3 4 1
7
6 5
2 3 4 1
1
2 3
54 6 7
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 4
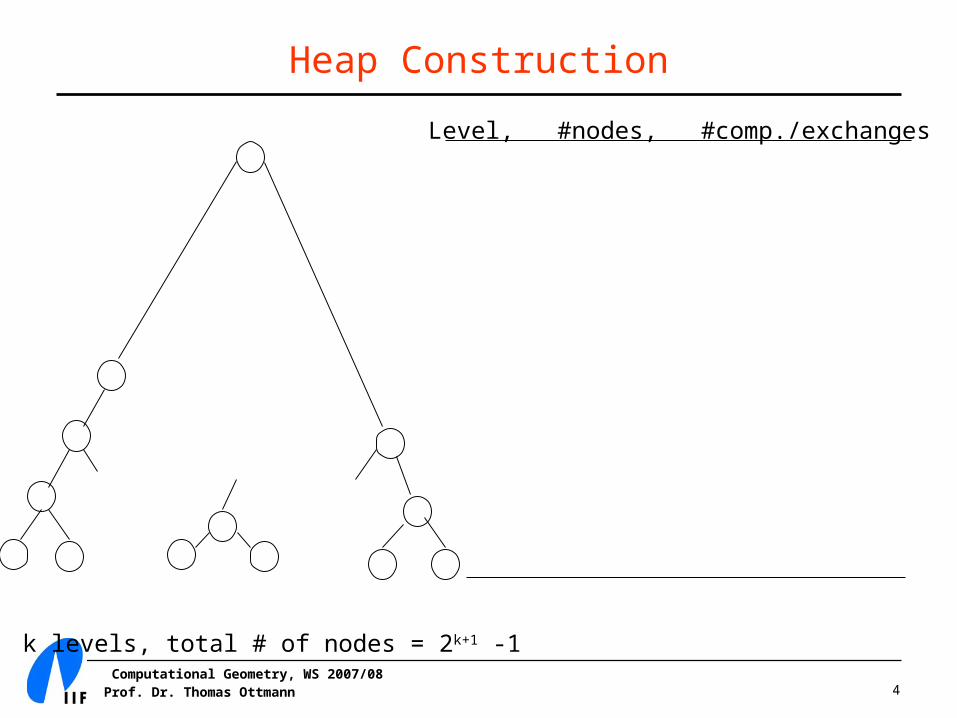
Heap Construction
Level, #nodes, #comp./exchanges
k levels, total # of nodes = 2k+1 -1
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 5
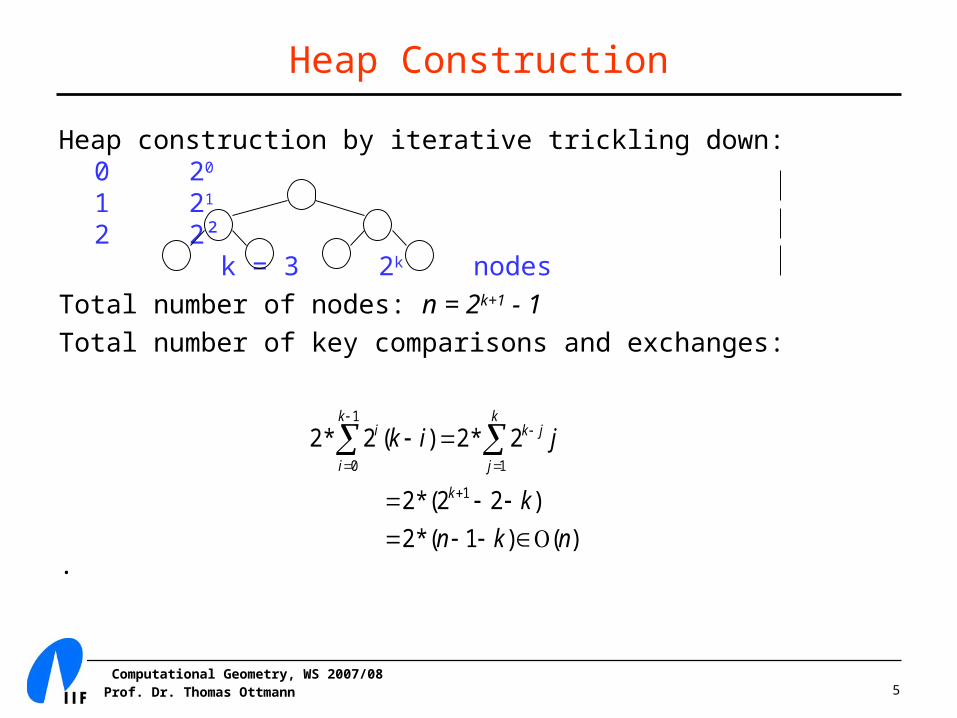
Heap Construction
Heap construction by iterative trickling down:0 20
1 21
2 2² k = 3 2k
nodes
Total number of nodes: n = 2k+1 - 1
Total number of key comparisons and exchanges:
.
)()1(*2
)22(*2
2*2)(2*2
1
1
0 1
nkn
k
jik
k
k
i
k
j
jki
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 6
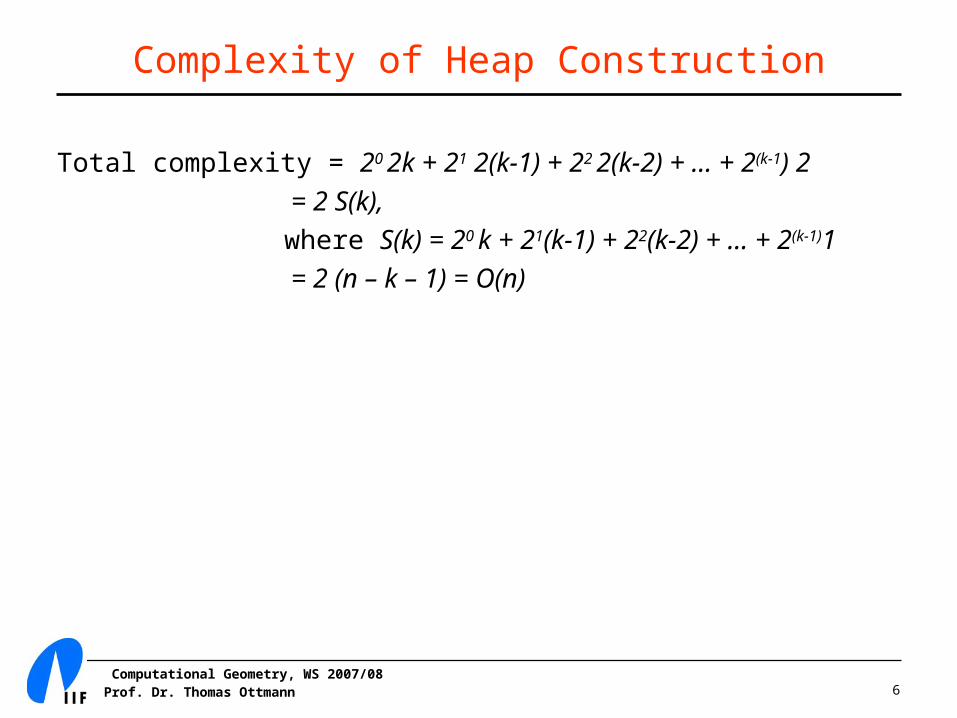
Complexity of Heap Construction
Total complexity = 20 2k + 21 2(k-1) + 22 2(k-2) + … + 2(k-1) 2
= 2 S(k),
where S(k) = 20 k + 21(k-1) + 22(k-2) + … + 2(k-1)1
= 2 (n – k – 1) = O(n)
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 7
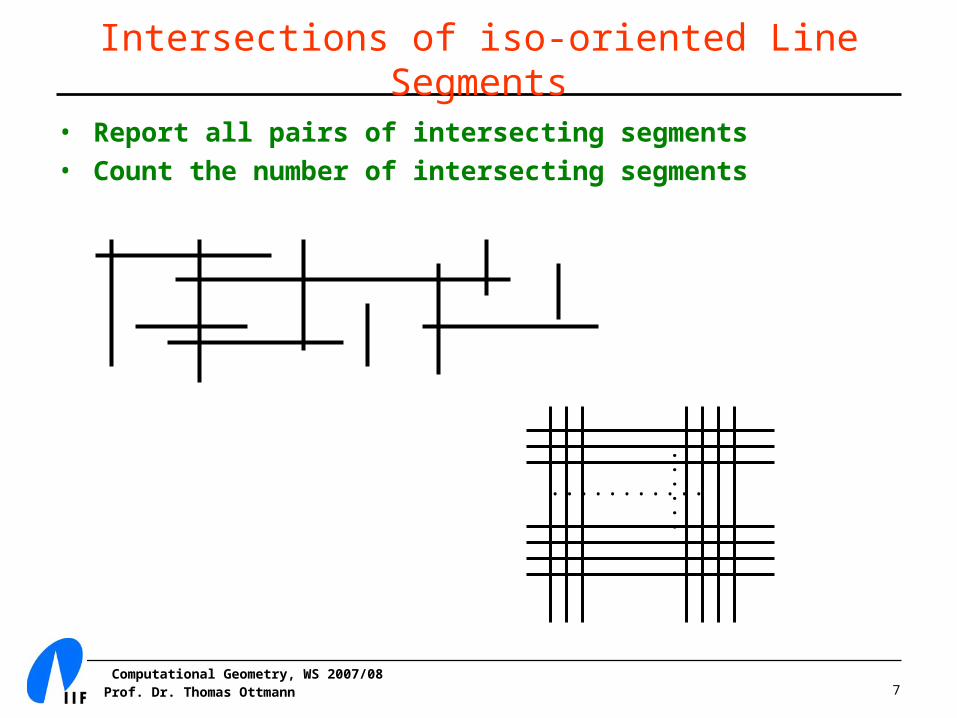
Intersections of iso-oriented Line Segments
• Report all pairs of intersecting segments• Count the number of intersecting segments
...........
......
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 8
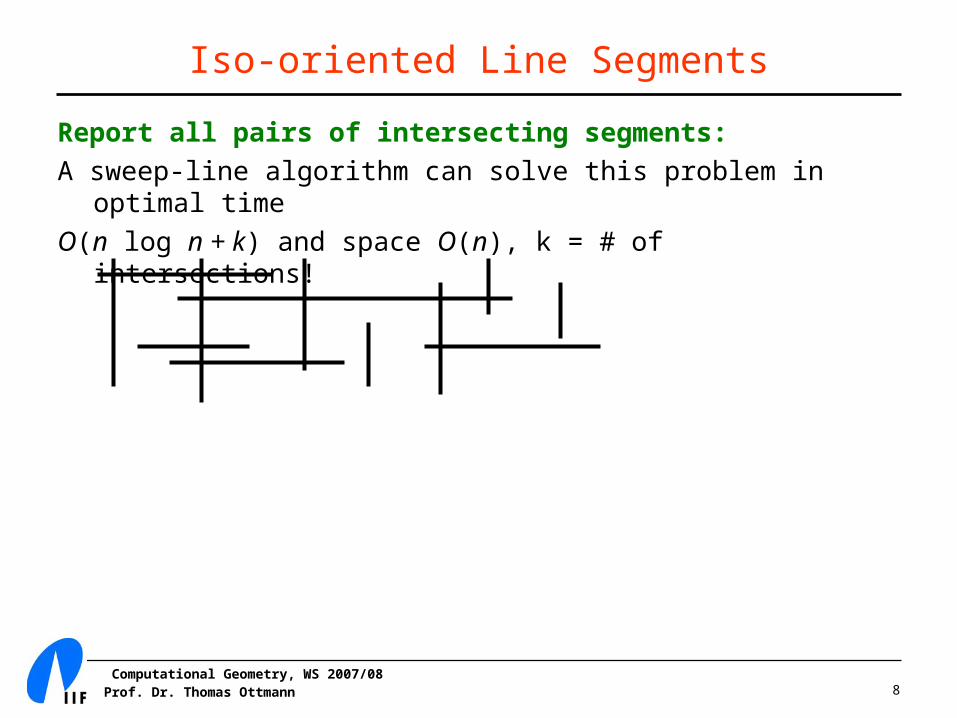
Iso-oriented Line Segments
Report all pairs of intersecting segments:
A sweep-line algorithm can solve this problem in optimal time
O(n log n + k) and space O(n), k = # of intersections!
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 9
Iso-oriented Line Segments
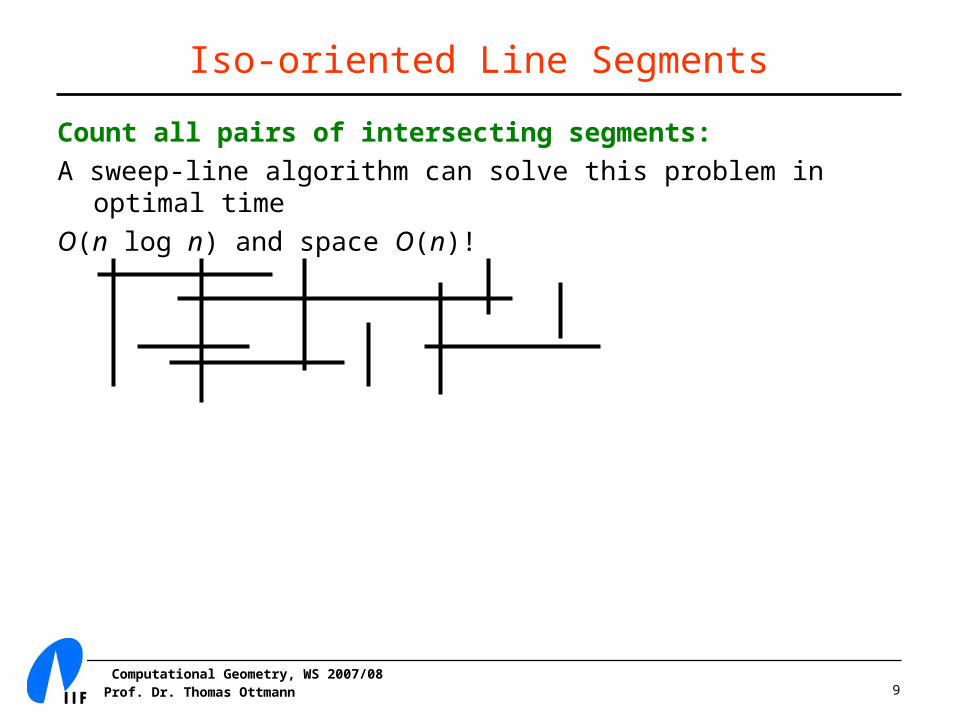
Count all pairs of intersecting segments:
A sweep-line algorithm can solve this problem in optimal time
O(n log n) and space O(n)!
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 10
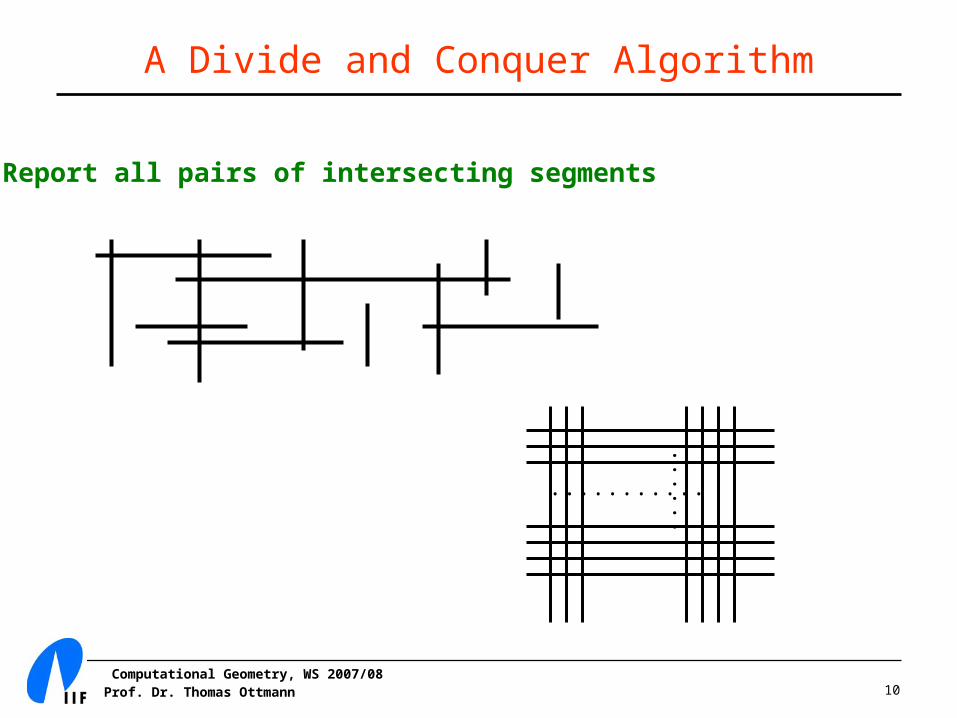
A Divide and Conquer Algorithm
Report all pairs of intersecting segments
...........
......
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 11
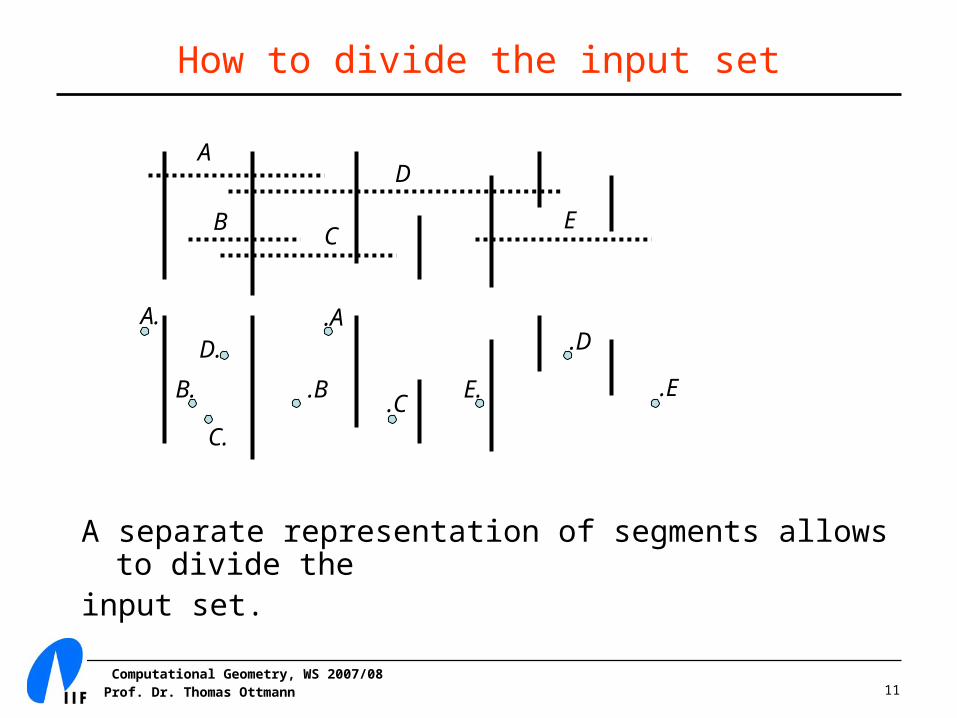
How to divide the input set
A separate representation of segments allows to divide theinput set.
A
BC
D
E
A.
B.
C.
D.
E.
.A.D
.B.C
.E
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 12
ReportCuts(S)
Input: Set S of vertical segments and endpoints of horizontal segments.
Output: All pairs of intersecting vertical segments and those horizontal segments which are represented by at least one endpoint in S.
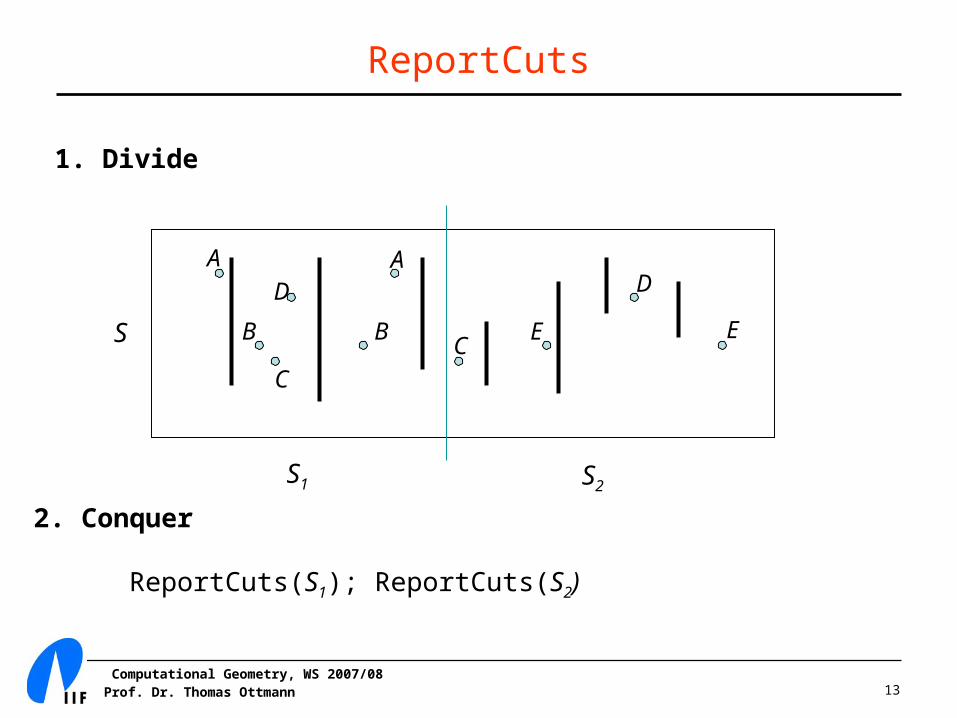
1. Divide
if |S| > 1
then divide S by a vertical line G into two sets S1 (to the left of G) and S2 (to the right of G) of equal size
else S contains no intersections
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 13
ReportCuts
A
B
C
D
E
AD
BC
ES
S1 S2
1. Divide
2. Conquer
ReportCuts(S1); ReportCuts(S2)
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 14
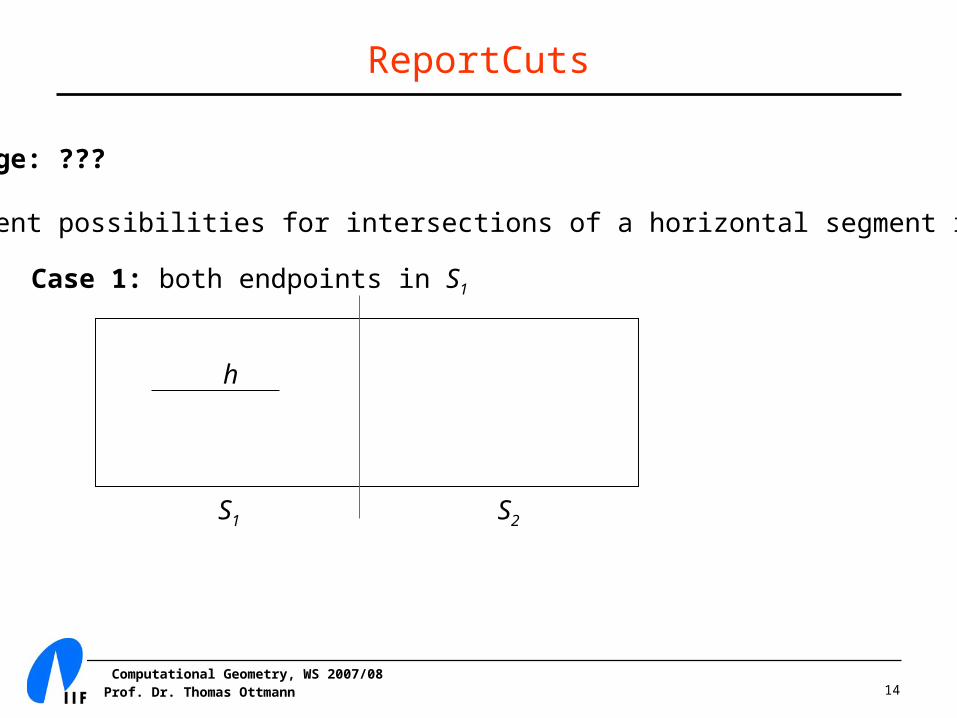
ReportCuts
3. Merge: ???
Different possibilities for intersections of a horizontal segment in S1
Case 1: both endpoints in S1
h
S1 S2
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 15
ReportCuts
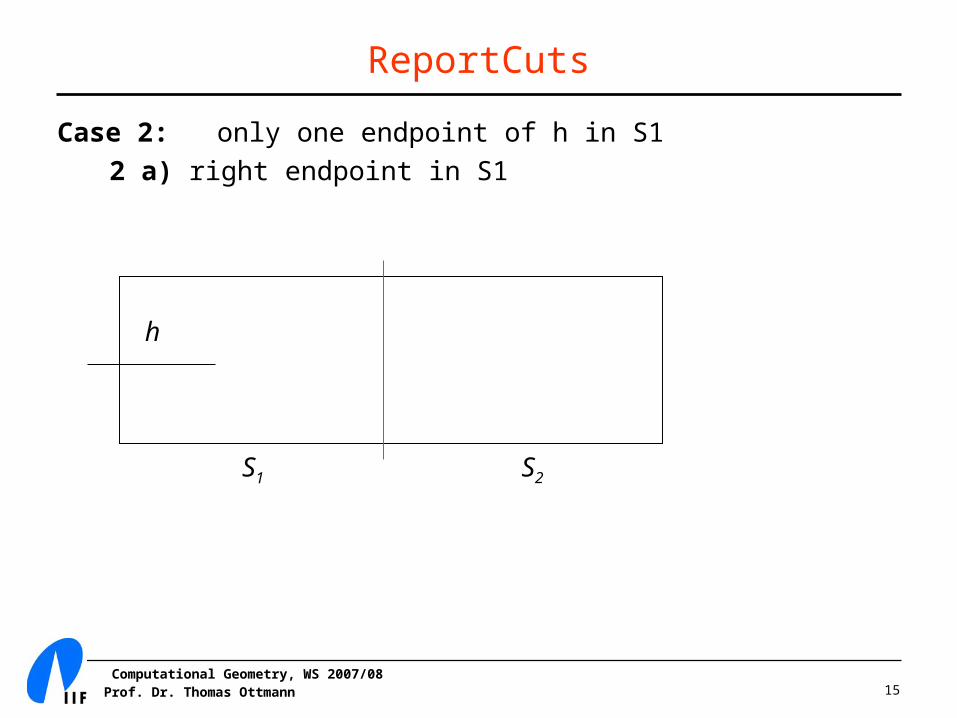
Case 2: only one endpoint of h in S1
2 a) right endpoint in S1
h
S1 S2
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 16
ReportCuts
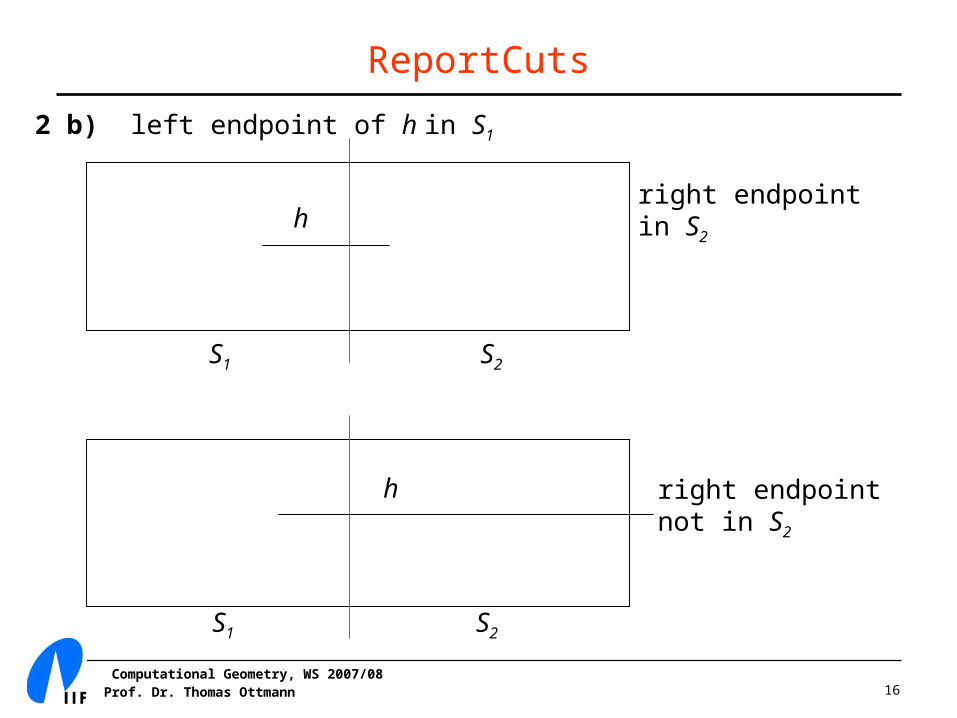
2 b) left endpoint of h in S1
h
S1
right endpointin S2
h
S1
right endpoint not in S2
S2
S2
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 17
ReportCuts(S)
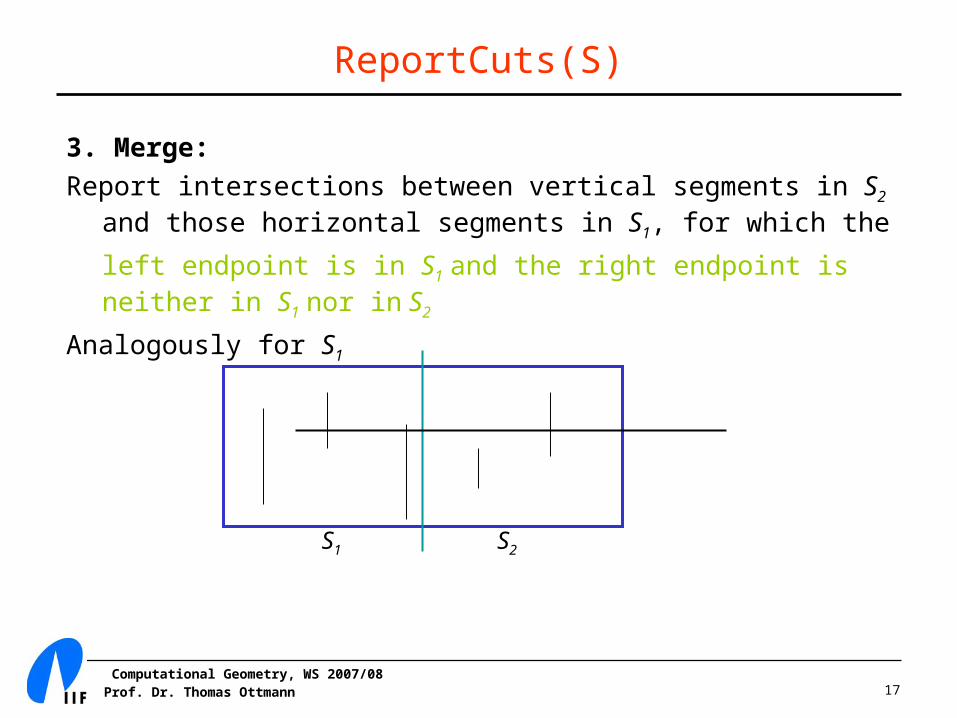
3. Merge:
Report intersections between vertical segments in S2 and those horizontal segments in S1, for which the
left endpoint is in S1 and the right endpoint is neither in S1 nor in S2
Analogously for S1
S1 S2

Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 18
Implemention
Set S
L(S): y-coordinats of all left endpoints in S which have no right partner in S
R(S): y-coordinats of all right endpoints in S which have no left
partner in S
V(S): y-intervals of vertical segments in S
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 19
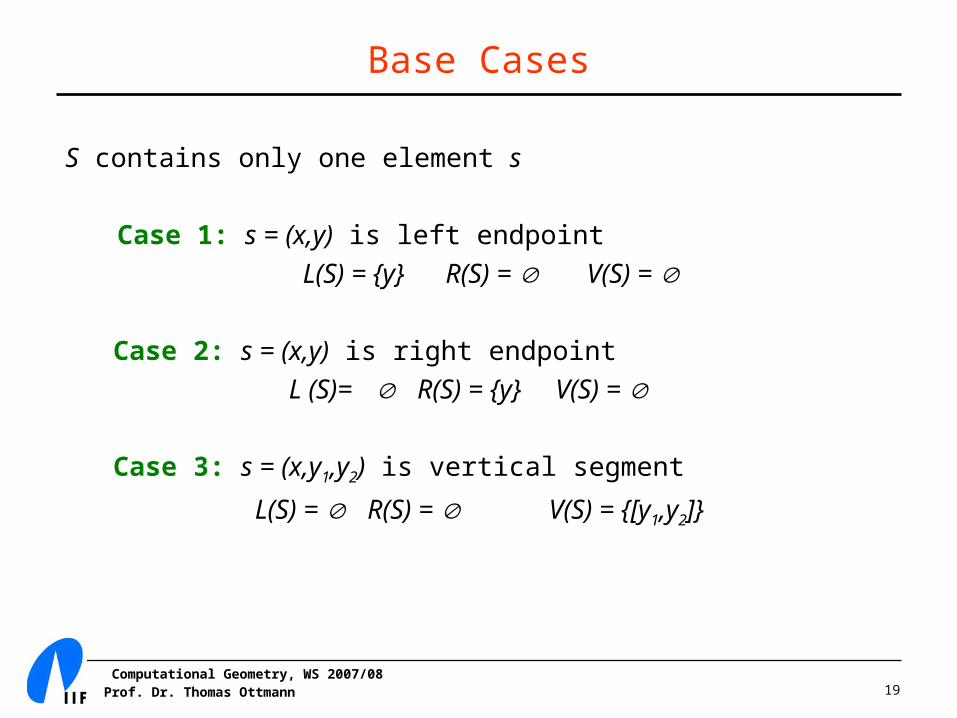
Base Cases
S contains only one element s
Case 1: s = (x,y) is left endpoint
L(S) = {y} R(S) = V(S) =
Case 2: s = (x,y) is right endpoint
L (S)= R(S) = {y} V(S) =
Case 3: s = (x,y1,y2) is vertical segment
L(S) = R(S) = V(S) = {[y1,y2]}
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 20
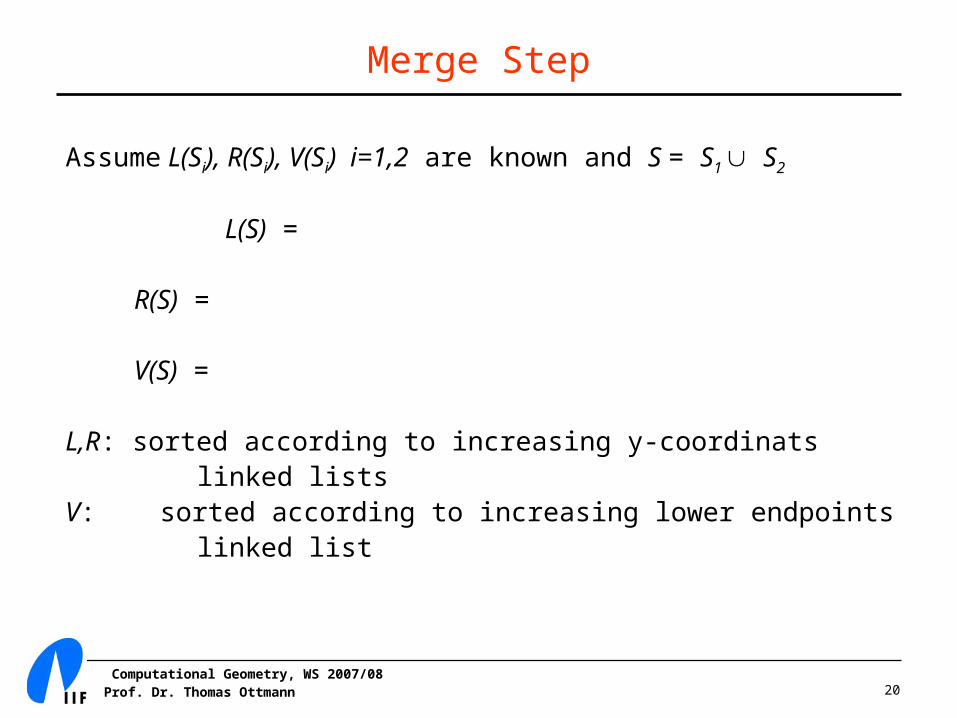
Merge Step
Assume L(Si), R(Si), V(Si) i=1,2 are known and S = S1 S2
L(S) =
R(S) =
V(S) =
L,R: sorted according to increasing y-coordinatslinked lists
V: sorted according to increasing lower endpoints linked list
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 21
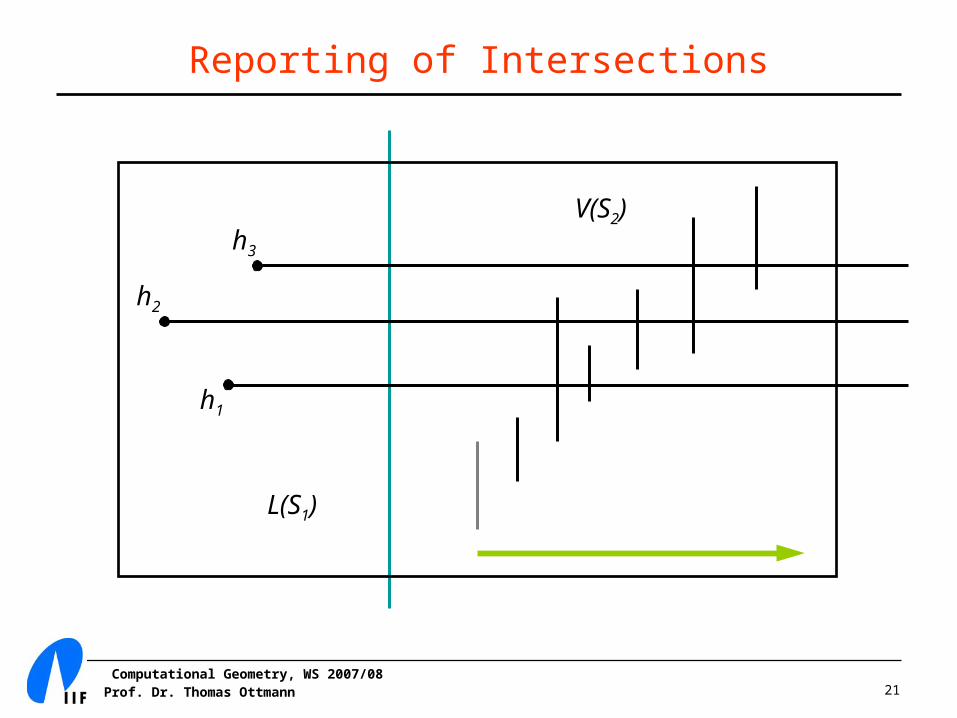
Reporting of Intersections
V(S2)h3
h2
h1
L(S1)
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 22
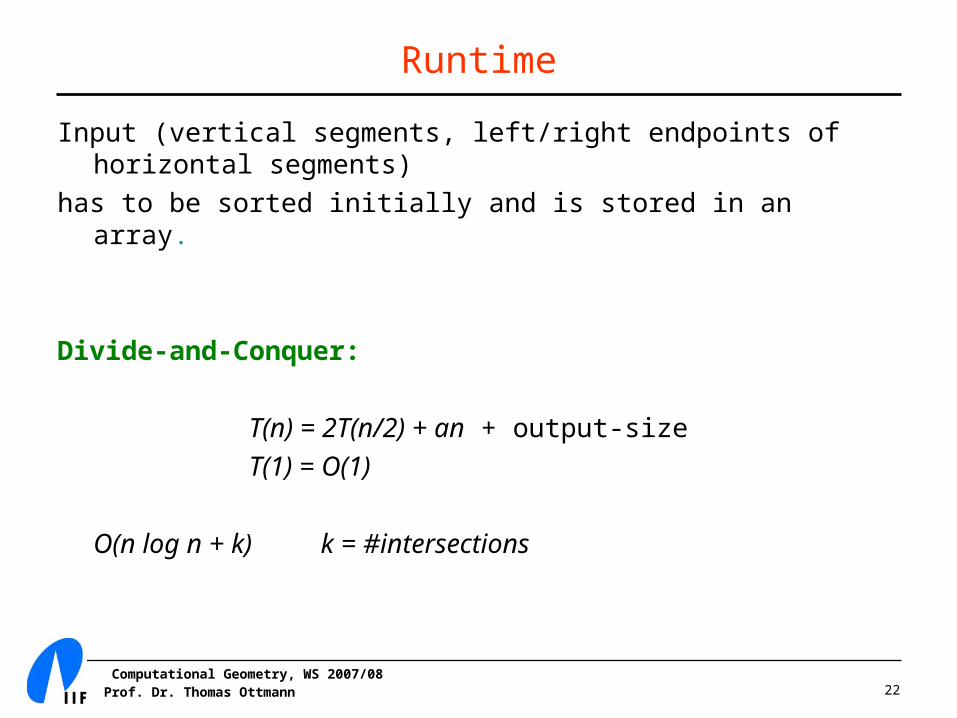
Runtime
Input (vertical segments, left/right endpoints of horizontal segments)
has to be sorted initially and is stored in an array.
Divide-and-Conquer:
T(n) = 2T(n/2) + an + output-size
T(1) = O(1)
O(n log n + k) k = #intersections
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 23
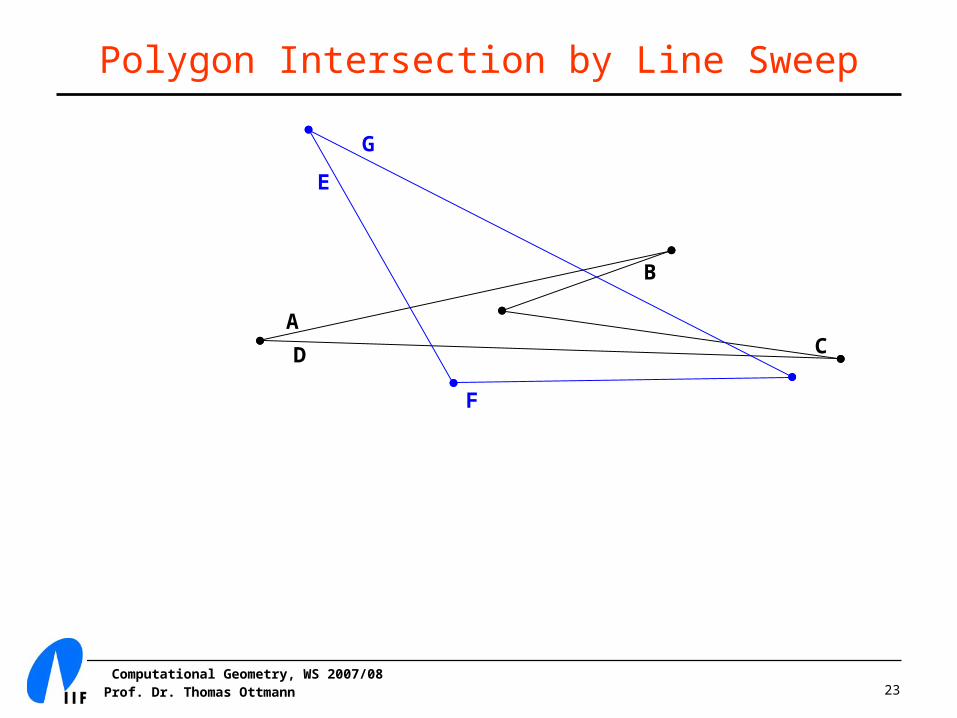
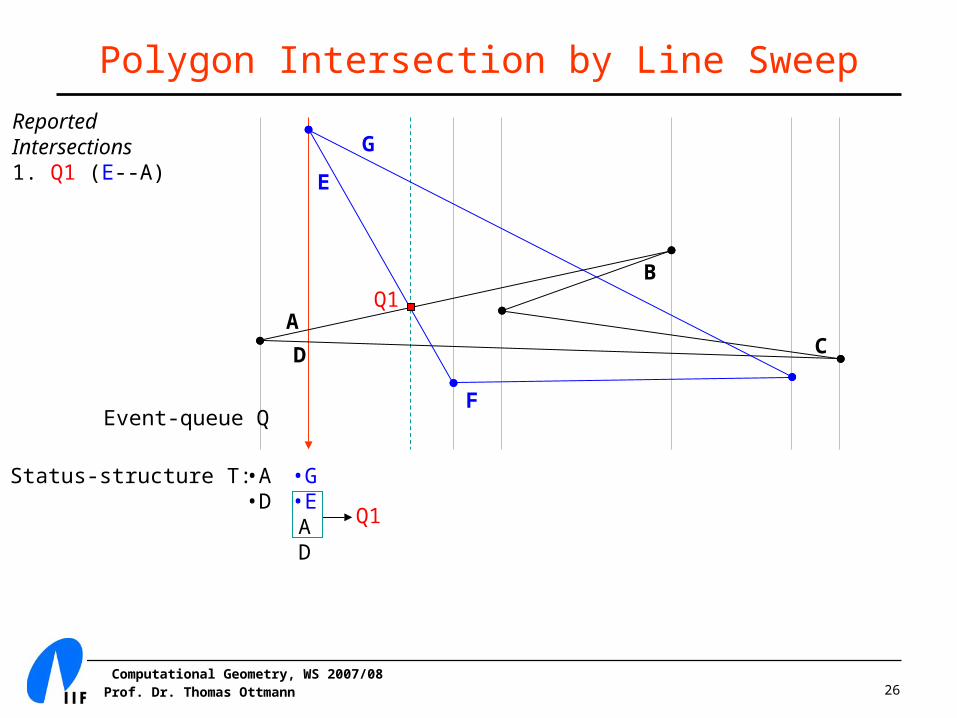
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 24
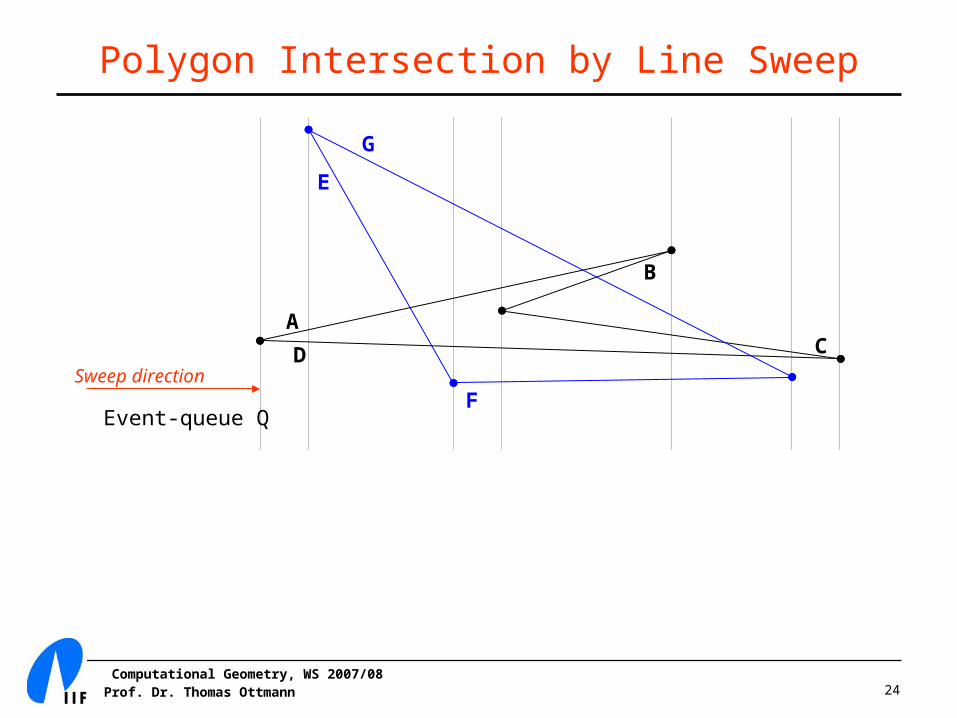
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
Sweep direction
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 25
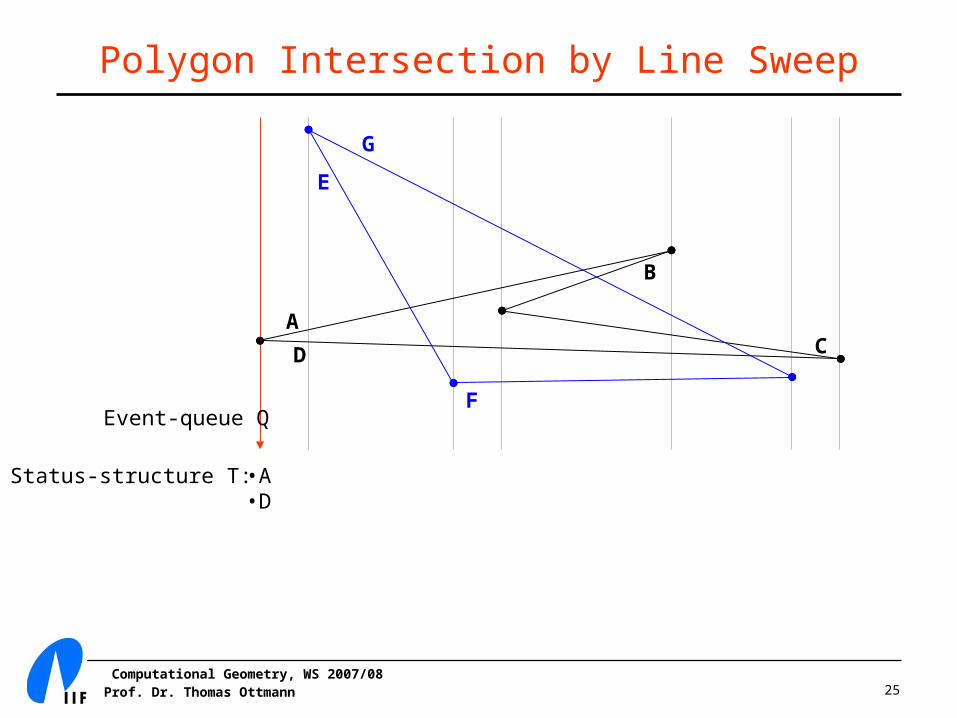
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
Status-structure T:
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 26
•G•EAD
Q1
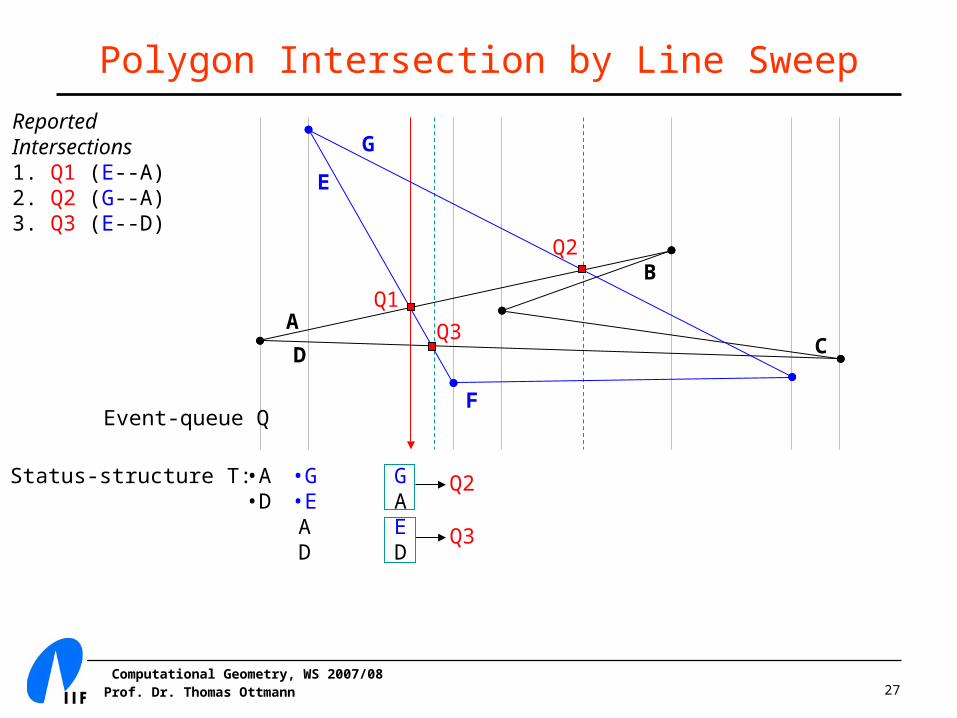
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
Q1
ReportedIntersections1. Q1 (E--A)
Status-structure T:
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 27
GAED
Q2
Q1
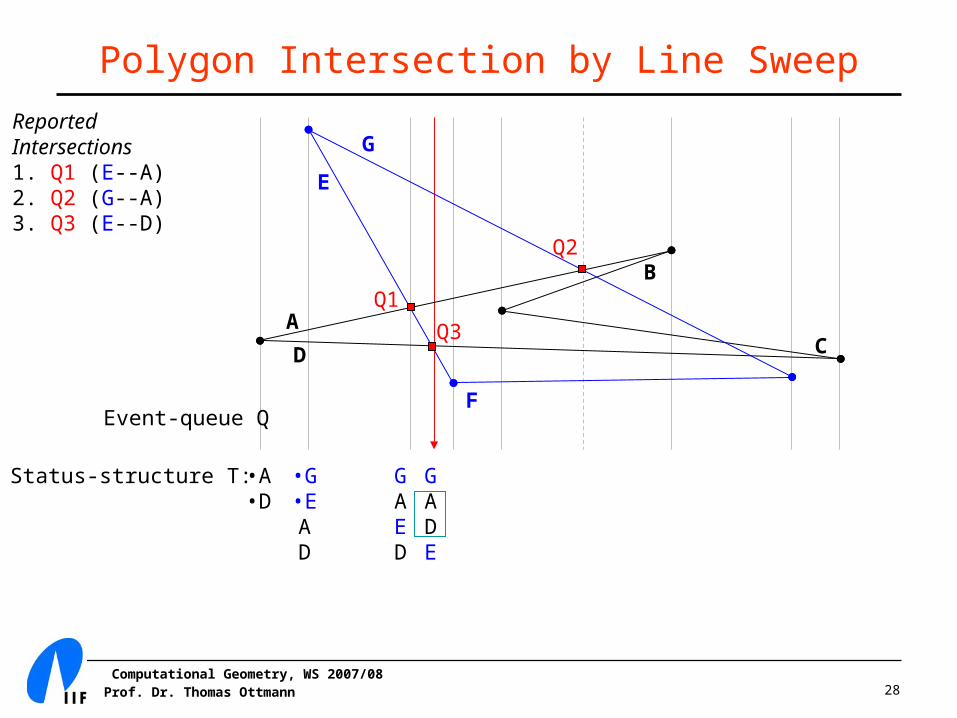
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
Q2
Q3
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)
Q3
Status-structure T:
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 28
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)
Q3
GAED
Status-structure T:

Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 29
GAD•F
GADE
Q2
Q1
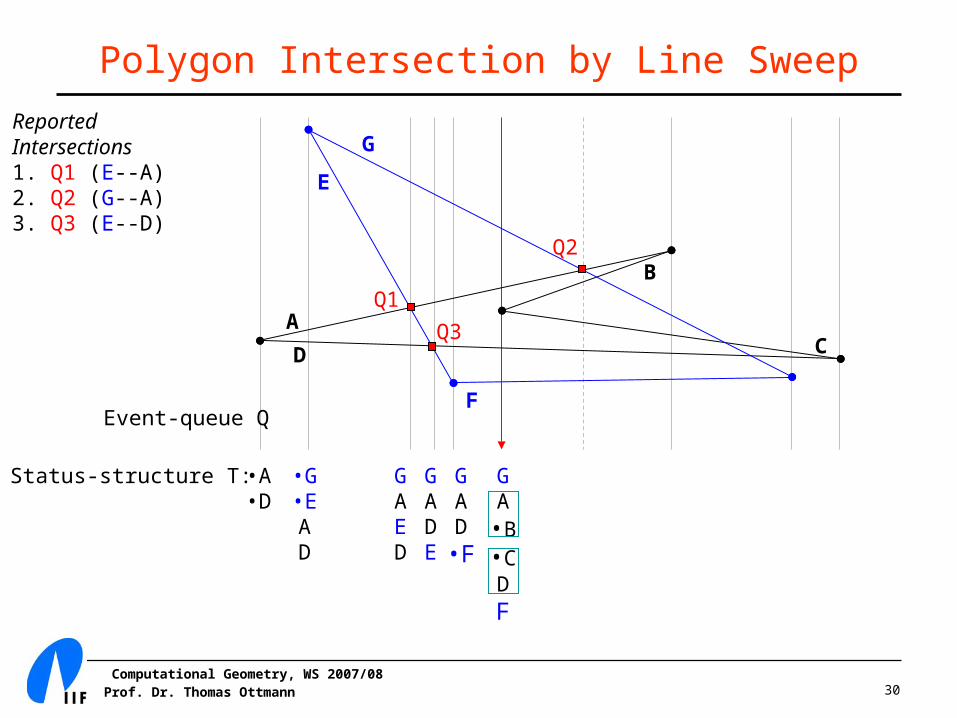
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)
Q3
GAED (E• = •F)
Status-structure T:
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 30
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)
Q3
GAED
Status-structure T:
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 31
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
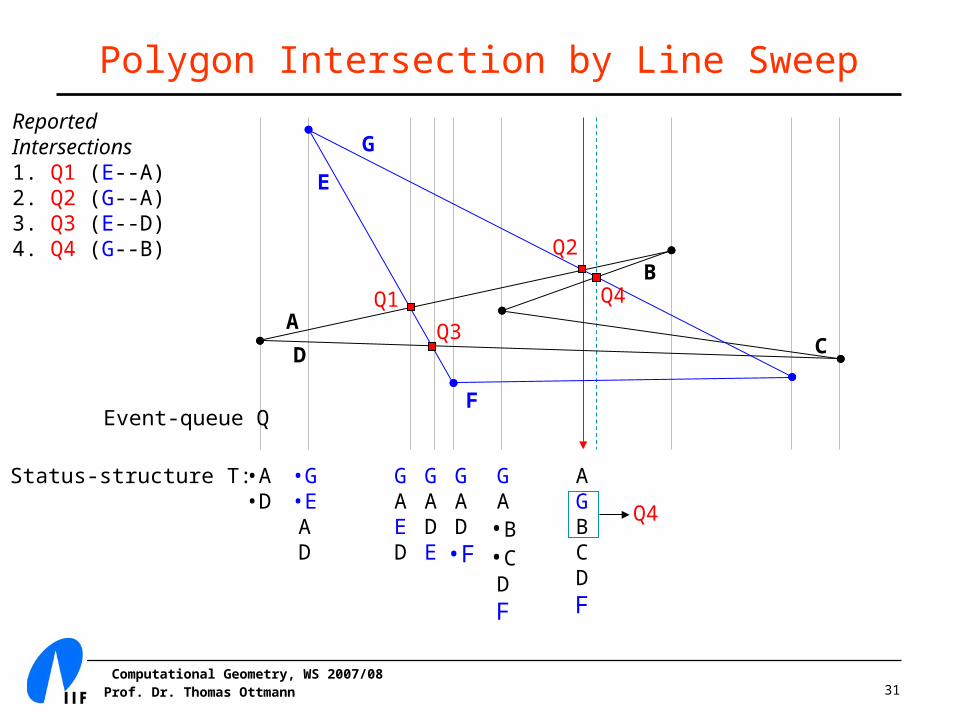
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)
Q3
GAED
Status-structure T: AGBCDF
Q4
Q4
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 32
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
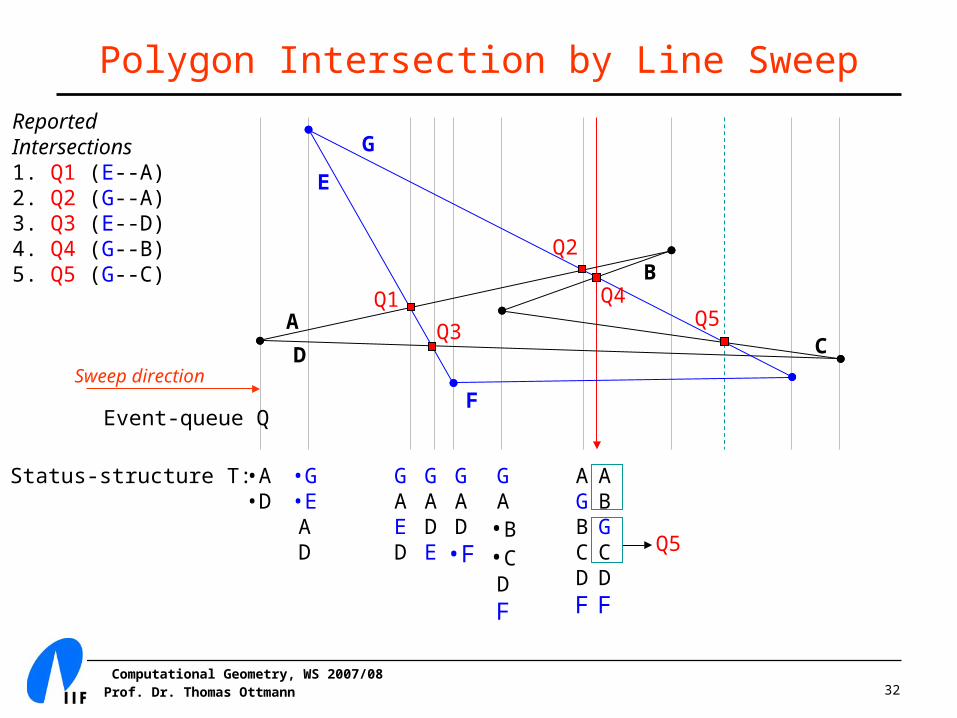
Sweep direction
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)
Q3
GAED
Status-structure T:
Q5
Q4Q5
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 33
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
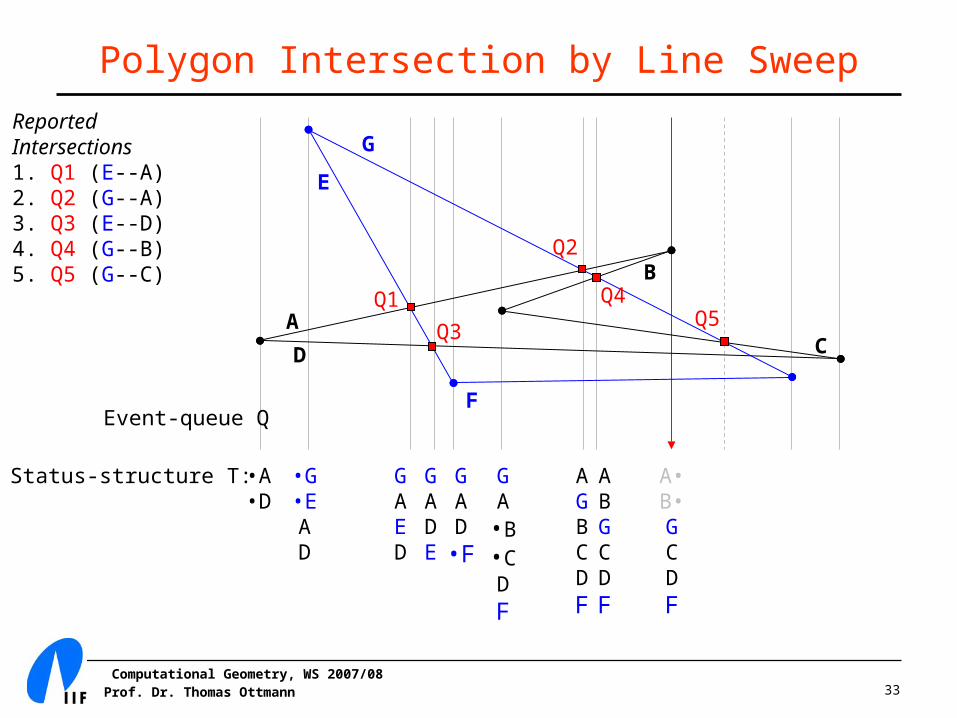
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)
Q3
GAED
Status-structure T:
Q4Q5
A•B•GCDF
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 34
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
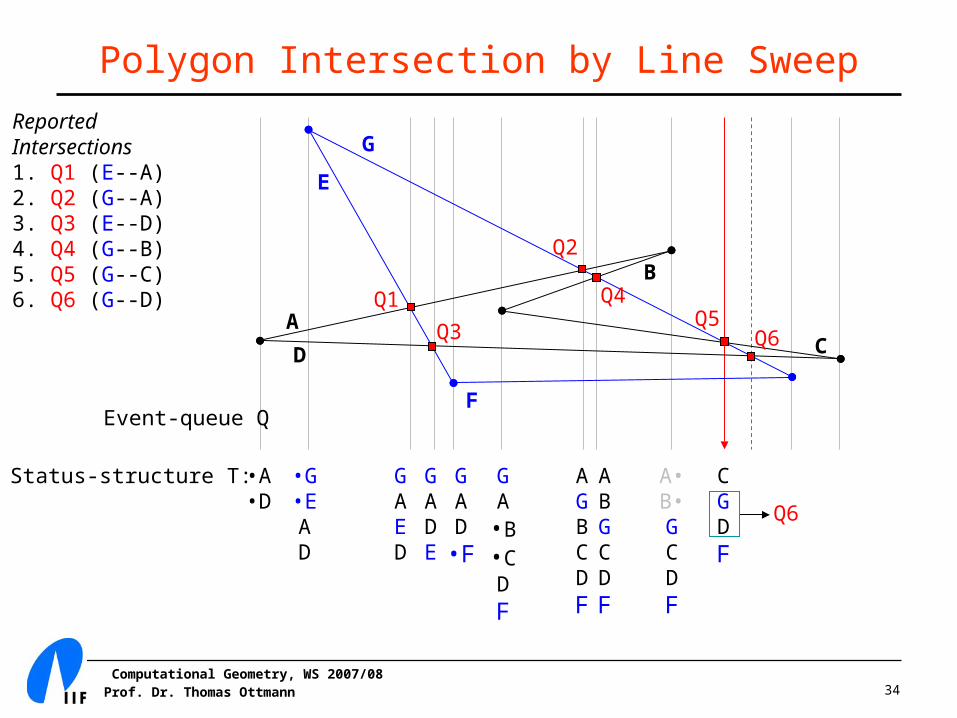
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)6. Q6 (G--D)
Q3
GAED
Status-structure T:
Q4Q5
A•B•GCDF
CGDF
Q6
Q6
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 35
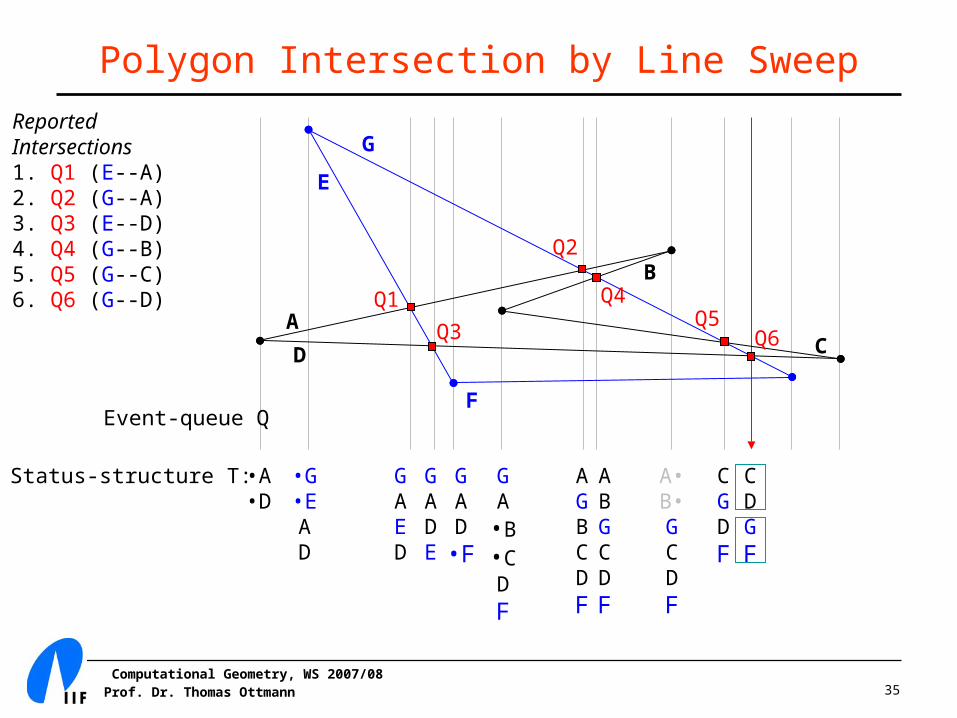
CDGF
CGDF
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)6. Q6 (G--D)
Q3
GAED
Status-structure T:
Q4Q5
A•B•GCDF
Q6
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 36
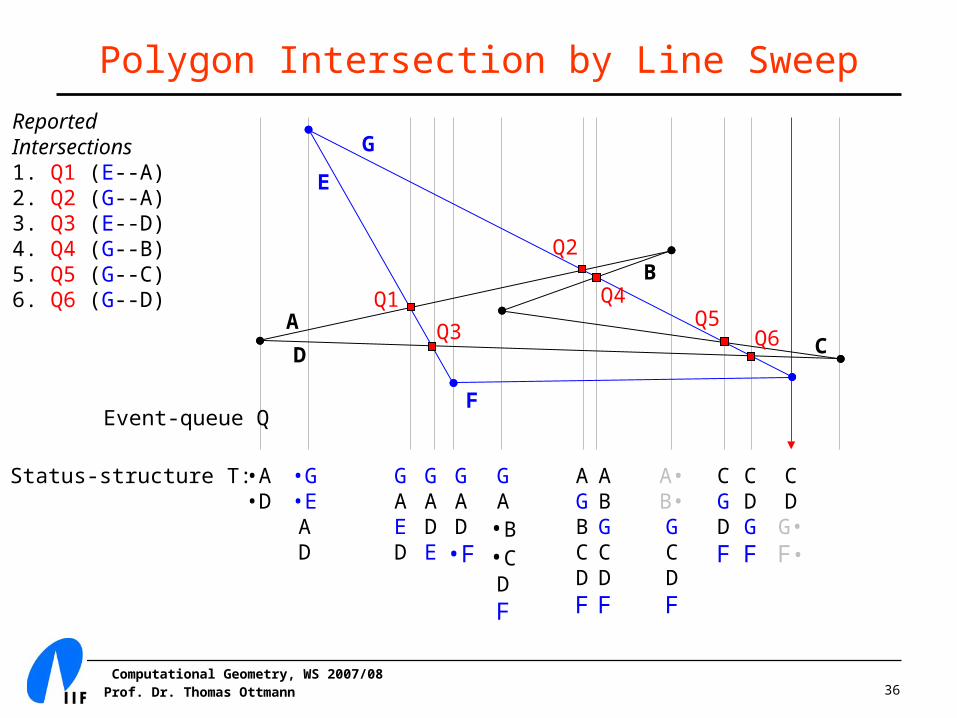
CDGF
CGDF
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)6. Q6 (G--D)
Q3
GAED
Status-structure T:
Q4Q5
A•B•GCDF
Q6
CDG•F•
Computational Geometry, WS 2007/08Prof. Dr. Thomas Ottmann 37
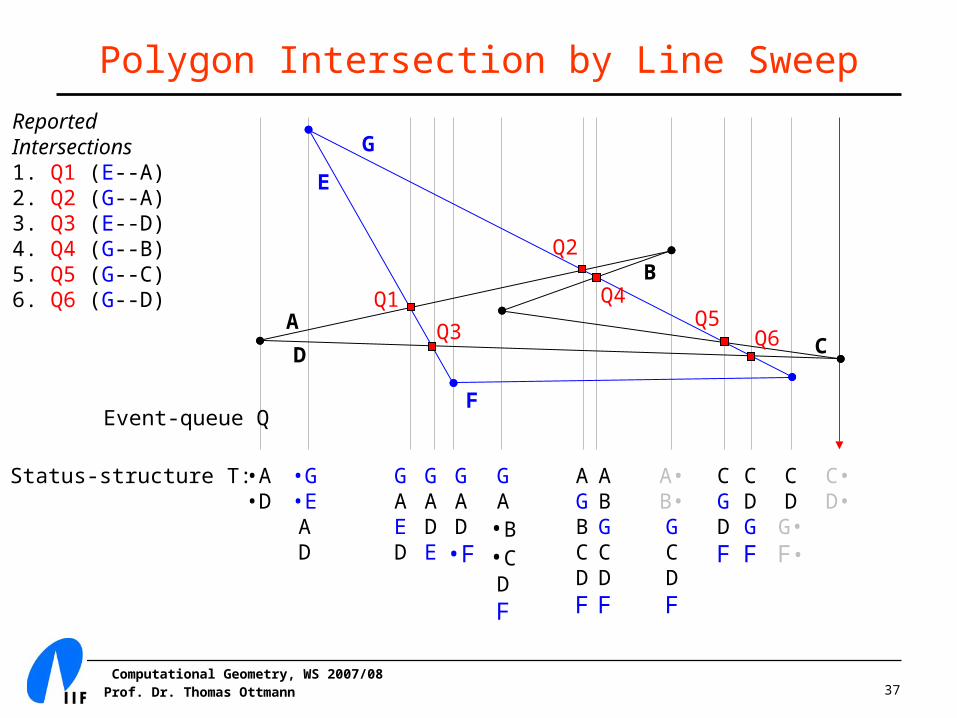
CDGF
CGDF
ABGCDF
AGBCDF
GA•B•CDF
GAD•F
GADE
Q2
Q1
Polygon Intersection by Line Sweep
A
B
CD
E
F
G
Event-queue Q
•A•D
•G•EAD
ReportedIntersections1. Q1 (E--A)2. Q2 (G--A)3. Q3 (E--D)4. Q4 (G--B)5. Q5 (G--C)6. Q6 (G--D)
Q3
GAED
Status-structure T:
Q4Q5
A•B•GCDF
Q6
CDG•F•
C•D•


















