
Limits and their applications
19
Limits and Their Applications MR. HASSAN HLEIHEL HAROUN EL MIR
Transcript of Limits and their applications

Limits and Their ApplicationsMR. HASSAN HLEIHEL
HAROUN EL MIR

What is a limit?
Why do we need limits?
Explanations
Examples
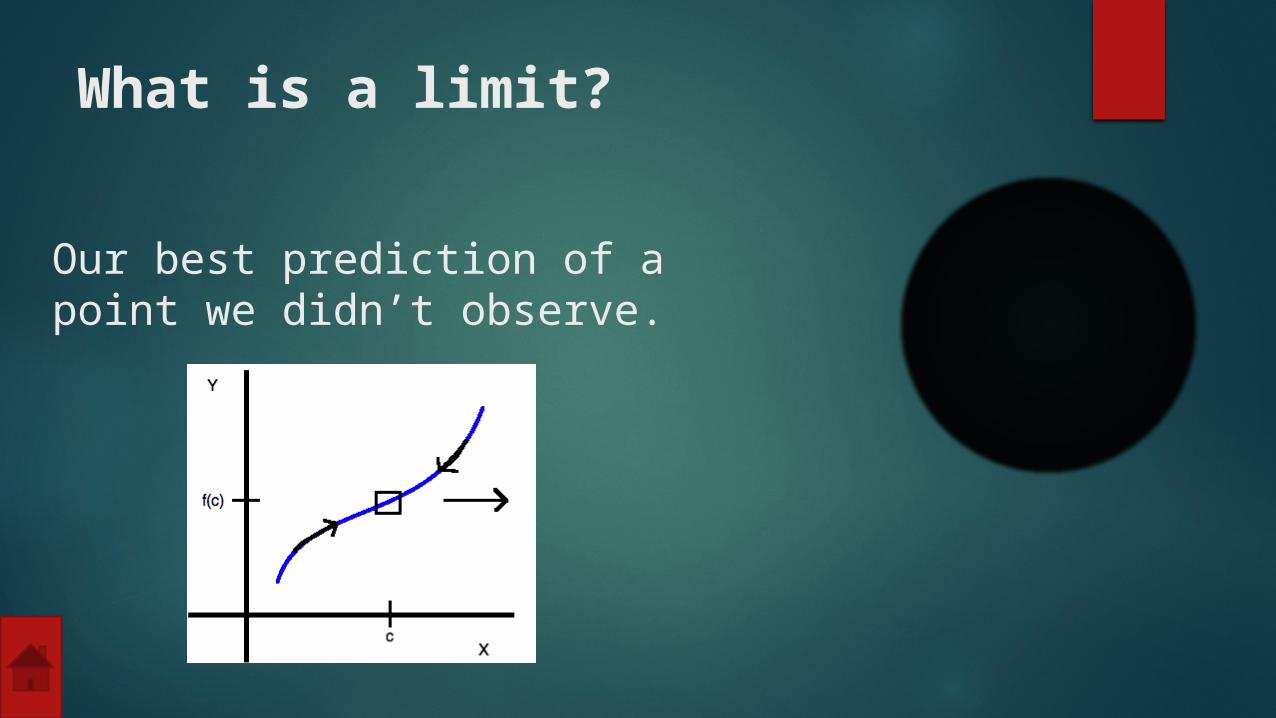
What is a limit?
Our best prediction of a point we didn’t observe.
How do we make a prediction?
Zoom into the neighboring points. If our prediction is always in-between neighboring points, no matter how much we zoom, that’s our estimate.

Why do we need limits?
Math has “black hole” scenarios (dividing by zero, going to infinity), and limits give us a reasonable estimate.

How do we know we’re right?
We don’t. Our prediction, the limit, isn’t required to match reality. But for most natural phenomena, it sure seems to.
Limits let us ask “What if?”. If we can directly observe a function at a value (like x=0, or x growing infinitely), we don’t need a prediction. The limit wonders, “If you can see everything except a single value, what do you think is there?”.
When our prediction is consistent and improves the closer we look, we feel confident in it. And if the function behaves smoothly, like most real-world functions do, the limit is where the missing point must be.

Predicting A Soccer Ball
Real-world objects don’t teleport; they move through intermediate positions along their path from A to B. Our prediction is “At 4:00, the ball was between its position at 3:59 and 4:01″. Not bad.
Conclusion:
Limits are a strategy for making confident predictions.
What things, in the real world, do we want an accurate prediction for but can’t easily measure?
Math English Human English
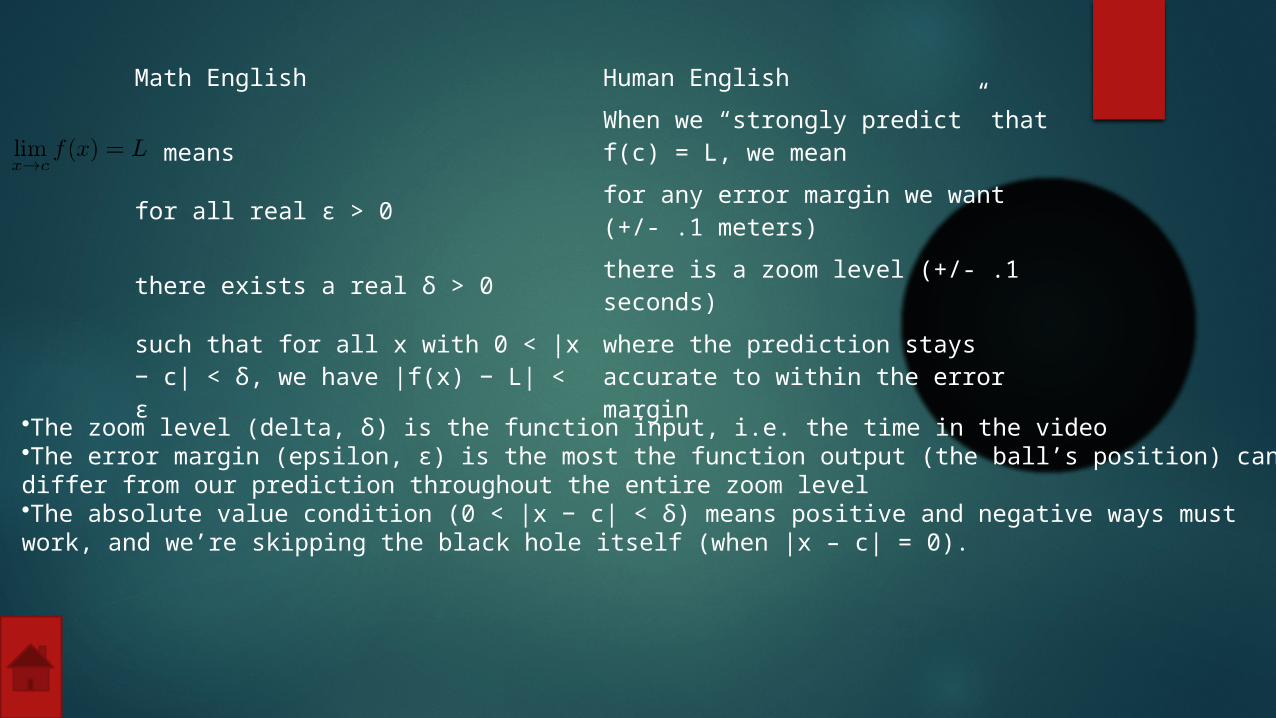
means When we “strongly predict” that f(c) = L, we mean
for all real ε > 0 for any error margin we want (+/- .1 meters)
there exists a real δ > 0 there is a zoom level (+/- .1 seconds)
such that for all x with 0 < |x − c| < δ, we have |f(x) − L| < ε
where the prediction stays accurate to within the error margin
•The zoom level (delta, δ) is the function input, i.e. the time in the video •The error margin (epsilon, ε) is the most the function output (the ball’s position) can differ from our prediction throughout the entire zoom level •The absolute value condition (0 < |x − c| < δ) means positive and negative ways must work, and we’re skipping the black hole itself (when |x – c| = 0).

Could we have multiple predictions? Imagine we predicted L1 and L2 for f(c). There’s some difference between them (call it .1), therefore there’s some error margin (.01) that would reveal the more accurate one. Every function output in the range can’t be within .01 of both predictions. We either have a single, infinitely-accurate prediction, or we don’t.
Ask for left and right hand limits
(always)

For example: Prove the limit at x=2 exists for
The first check: do we even need a limit? •Assume x is anywhere except 2
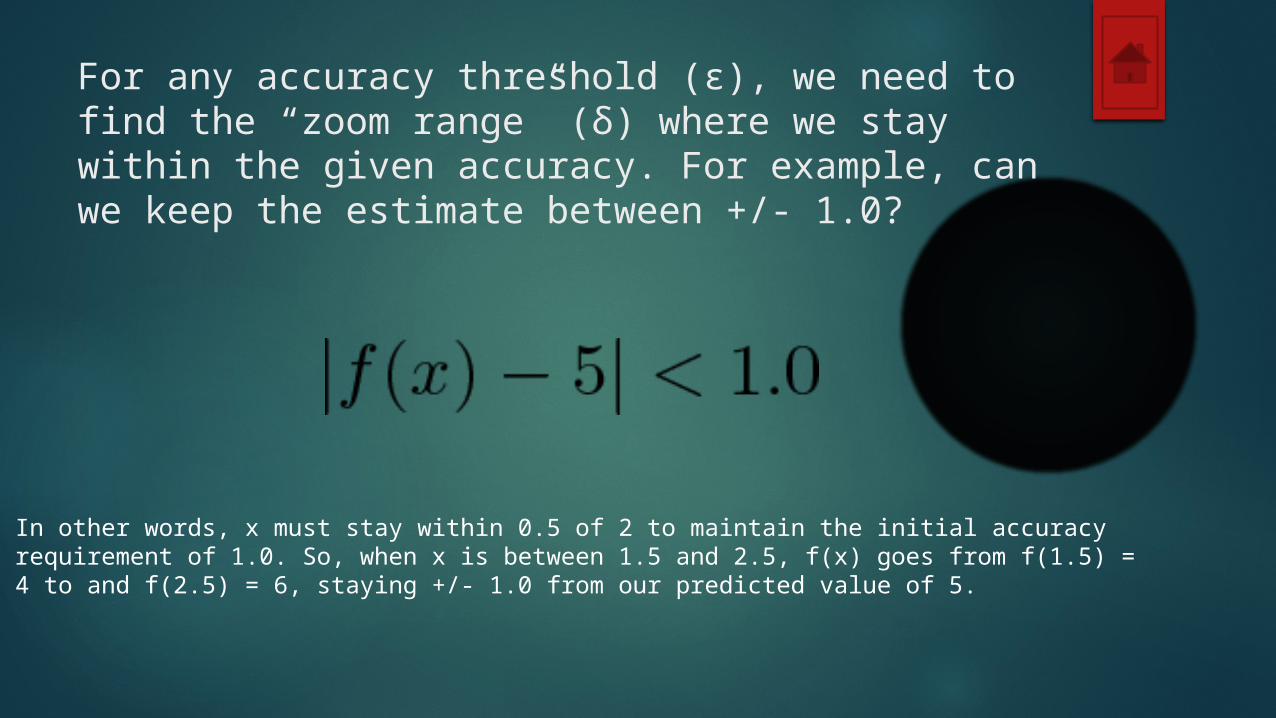
For any accuracy threshold (ε), we need to find the “zoom range” (δ) where we stay within the given accuracy. For example, can we keep the estimate between +/- 1.0?
In other words, x must stay within 0.5 of 2 to maintain the initial accuracy requirement of 1.0. So, when x is between 1.5 and 2.5, f(x) goes from f(1.5) = 4 to and f(2.5) = 6, staying +/- 1.0 from our predicted value of 5.

Examples:if we are 10 feet from the wall and walk half the distance each time, will you ever reach the wall?
without the help of calculus most students would be pretty stumped about this question..applying calculus it is obvious that you would eventually hit the wall
a speedometer in a car is constantly calculating a limit where time goes to zero...if you calculated velocity over a certain range of time it would be an average velocity not instantaneous. since v=d/t, in order to make t = 0 one would need to use a limit
in engineering we use it to calculate areas of complex shapes where basic geometry fails

Only so many cars can be moving on a given road. Traffic flow limits. These limits are represented by stops. If you remove one, the flow may increase till the next limit is found (a new stop).
Only so many messages can go through a given network. Another traffic flow limit.
There is a limit to how much food one can eat, or how little.
Limit to how fast you can go on the road. Many limits like this are imposed by regulations.

A sky diver or any object reaching terminal velocity when falling. When F air resistance = F gravity
Limits are everywhere in nature.
Depending on the number of foxes and rabbits and their death rates and hunting rates, after a long time, or the limit of the populations can reach stable levels, can be cyclic, or both die out and eventually reach a limit of zero.
Another is predator-prey systems. An example would be a fox population hunting rabbits.

Click icon to add picture
a guitar string vibrating. It starts out with large displacement and eventually becomes still.
The reading of your speedometer (e.g., 85 km/h) is a limit in the real world. Your speed is changing continuously during time, and the only "solid", i.e., "limitless" data you have is that it took you exactly 2 hours to drive the 150 km

YouThank




![Limits Good - opencaselist12.paperlessdebate.com€¦ · Web viewLimits Good . Their counter-interpretation explodes limits: [EXPLAIN] Predictable Limits are . good: a.) They kill](https://static.fdocuments.net/doc/165x107/5ac798967f8b9a51678b9655/limits-good-web-viewlimits-good-their-counter-interpretation-explodes-limits.jpg)













