Lecture09 Ee485 Magnetic
9
Magnetic Actuation EE485A Lecture 10/27/2008
-
Upload
arunbalaji86 -
Category
Documents
-
view
223 -
download
1
Transcript of Lecture09 Ee485 Magnetic

Magnetic Actuation
EE485A Lecture10/27/2008

Magnetic Terminology Magnetic Field Intensity, H [A/m]: driving magnetic influence
external to a material Magnetic Field Density, B [T, or Wb/m2 or Vs/m2]: induced total
magnetic field inside a piece of magnetic material. Also called magnetic induction or magnetic flux density. Sense of magnitude:
Refrigerator magnet: 10 to 100 mT Earth magnetic field (near equator): 0.1 mT Rare earth magnet used in MRI: 1-2 T
For small levels of H, H and B related by:
B = 0H+M = 0 (H+H)=r0H0 = magnetic permeability of space= 1.257 x 10-6 Wb/(Am)r = relative permeability of the material = r –1 = magnetic susceptibility
Magnetic Terminology, cont.
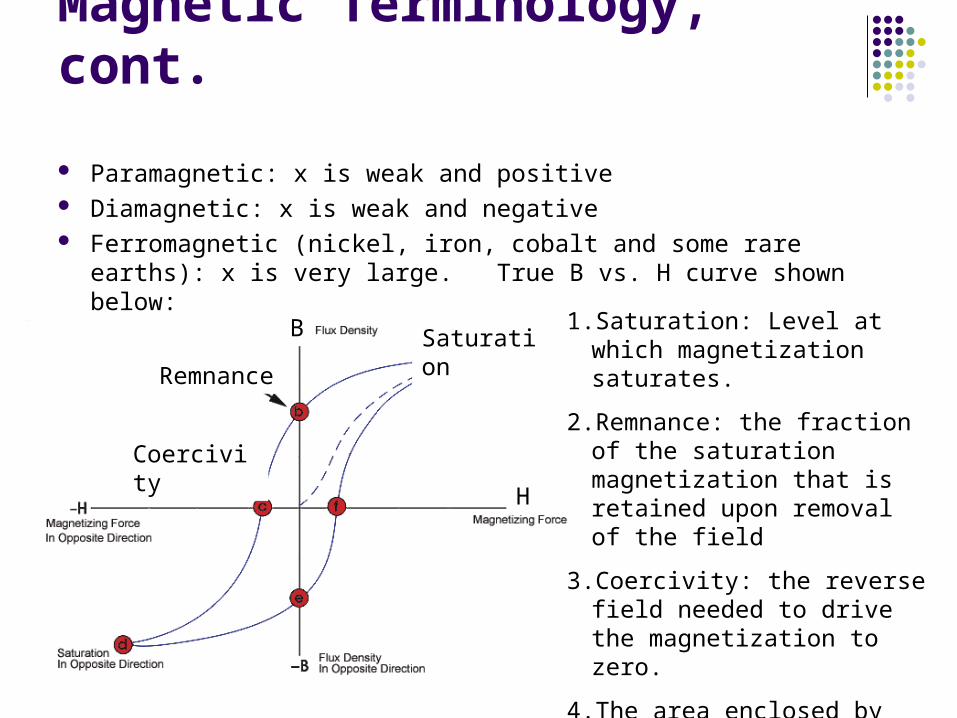
Paramagnetic: x is weak and positive Diamagnetic: x is weak and negative Ferromagnetic (nickel, iron, cobalt and some rare earths): x is very
large. True B vs. H curve shown below: 1. Saturation: Level at which
magnetization saturates.
2. Remnance: the fraction of the saturation magnetization that is retained upon removal of the field
3. Coercivity: the reverse field needed to drive the magnetization to zero.
4. The area enclosed by the hysteresis curve indicates the amount of magnetic energy stored in the material.
Remnance
Coercivity
Saturation
H
B

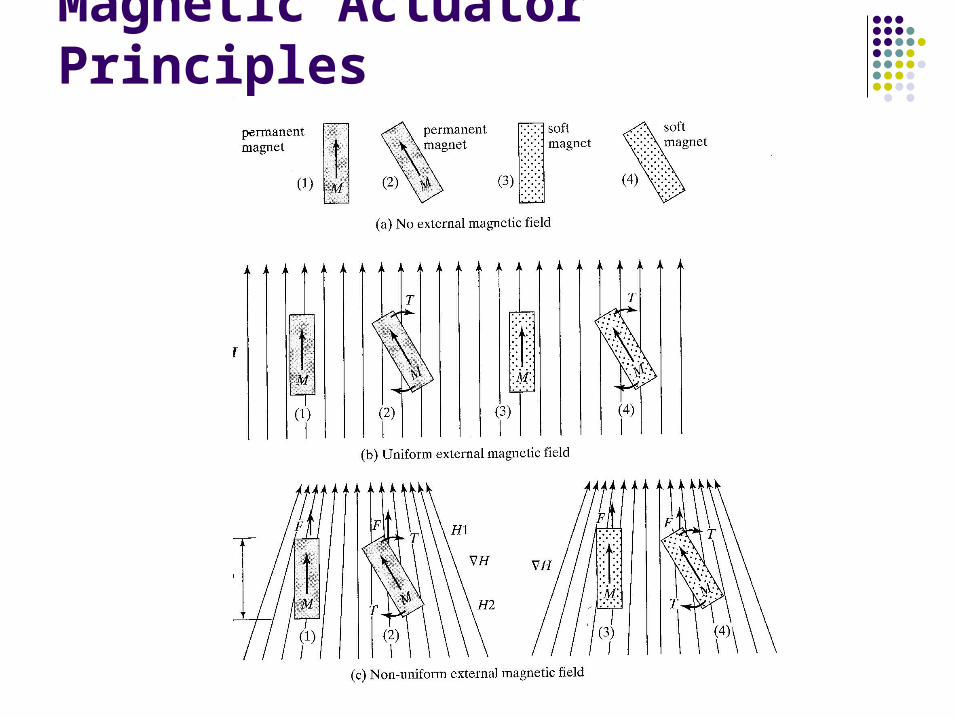
Magnetic Actuator Principles Lorentz Force Actuator
Force induced between current-carrying conductor and external magnetic field
F = qv X B, or in terms of magnitude: F = qvBsin Interaction between permanent magnet or “soft
magnet” and DC magnetic field Objects will experience torque to align with external field. If field is non-uniform, objects will also experience a force. In soft magnets, shape anisotropy plays an important role
in determining direction of magnetization
F M wt H M = Magnetization (H)
wt = cross-sectional area
H = difference in magnetic driving field seen by object
Magnetic Actuator Principles

Micromagnetic Fabrication Large thicknesses
generally required Electroplating is most
common method for depositing ferromagnetic materials Requires deposition of
conductive seed layer which is usually later removed from unwanted areas
Popular materials: Ni80Fe20 permalloy CoNiMnP permanent
magnet
Magnetic Actuation Case Studies See pp. 292-303

Sensing Method ComparisonMethod Advantages Disadvantages
Electrostatic sensing
Simplicity of materialsLow PowerRapid Response
Large footprintElectronics complexitySensitive to particles and humidity
Thermal sensingSimplicity of materialsElimination of moving parts
Large power consumptionSlower response (than electrostatic)
Piezoresistive sensing
High sensitivity achievableSimplicity of materials
Requires doping of silicon to achieve high performanceSensitive to environmental temperature changes
Piezoelectric sensing
Self generating – no power necessary
Complex material growth and process flowCannot sustain high temperature operation

Actuation Method Comparison
Method Advantages Disadvantages
Electrostatic actuation
Simplicity of materialsRapid Response
Trade-off between magnitude of force and displacementLimited by pull-in
Thermal actuationCapable of achieving large displacementModerately fast response
Relatively large power consumptionSensitive to environmental temperature changes
Piezoelectric actuation
Fast responseCapable of moderately large displacement
Requires complex material preparationDegraded performance at low frequencies
Magnetic actuationCapable of generating large angular displacements
Moderately complex processDifficult to form on-chip, high-efficiency solenoids








![NM2012S-Lecture09-Gauss Elimination.ppt [相容模式]](https://static.fdocuments.net/doc/165x107/62a7cfa23fbf1d3cea3c92a5/nm2012s-lecture09-gauss-.jpg)