Lecture 9 Iterative control...
10
Lecture 9 Iterative control approaches Modeling meets control meet modeling meets control meets modeling meets control meets modeling ... Tuesday, April 3, 2012
Transcript of Lecture 9 Iterative control...
Lecture 9Iterative control
approaches
Modeling meets control meet modeling meets control meets modeling meets control meets modeling ...
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
An archetypeOur overall aim is to minimize a performance function on the true system
Define “local” criterion
Look at the recursion
This is a descent procedure, where each modeling and control design phase drives down the value of the local criterion, which trades nominal performance against stability robustness
This particular approach is infeasible because it requires knowledge of the true plant
So we try an approximate approach using instead of Then the identification uses closed-loop data
2
Jlocal = J(G0, Gθ, C) =
����(G0 −Gθ)
C
1+GθCWH0
1+GθC
����∞
Jglobal = J(G0, C) =
����WH0
1 +G0C
����∞
Ci = argminC
Jlocal(G0, Gθ,i, C)
Gθ,i+1 = argminθ
Jlocal(G0, Gθ, Ci)
H2 H∞
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
Hakvoort and the Dutch mastersFix the control design method .... LQG or minimum variance
Adjust the identification noise model iteratively, and based on the current plant model, to create a control-relevant criterion via the noise model
Rinse and repeatThe aim is to prefilter the prediction error to yield the optimal data properties associated with identifying a model for subsequent LQG control design - a theory developed by Gevers and Ljung for the case of the system being in the model set. The optimal identification conditions occur when the system is optimally controlled.This indirect approach works in examples but is not theoretically fully supported ... nor is any other scheme
3
Hf = (1 +GθC)
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
The windsurfer scheme
An approach of increasing performanceStep 1: excite two closed loops, one with the real plant and the designed closed loop with the model. Determine satisfaction with modeling performance
happy: move to Step 2sad: identify a new model using Hansen scheme
based on coprime factor methods, control-relevantStep 2: design a new feedback controller using Internal Model Control with larger bandwidth, go to Step 1
applicable for stable plants, closed-loop bandwidth is a parameter
Step 2A: use control-oriented model reduction as possible
4Tuesday, April 3, 2012
Approximate System Identification & ControlMAE283B Lecture 9, Slide
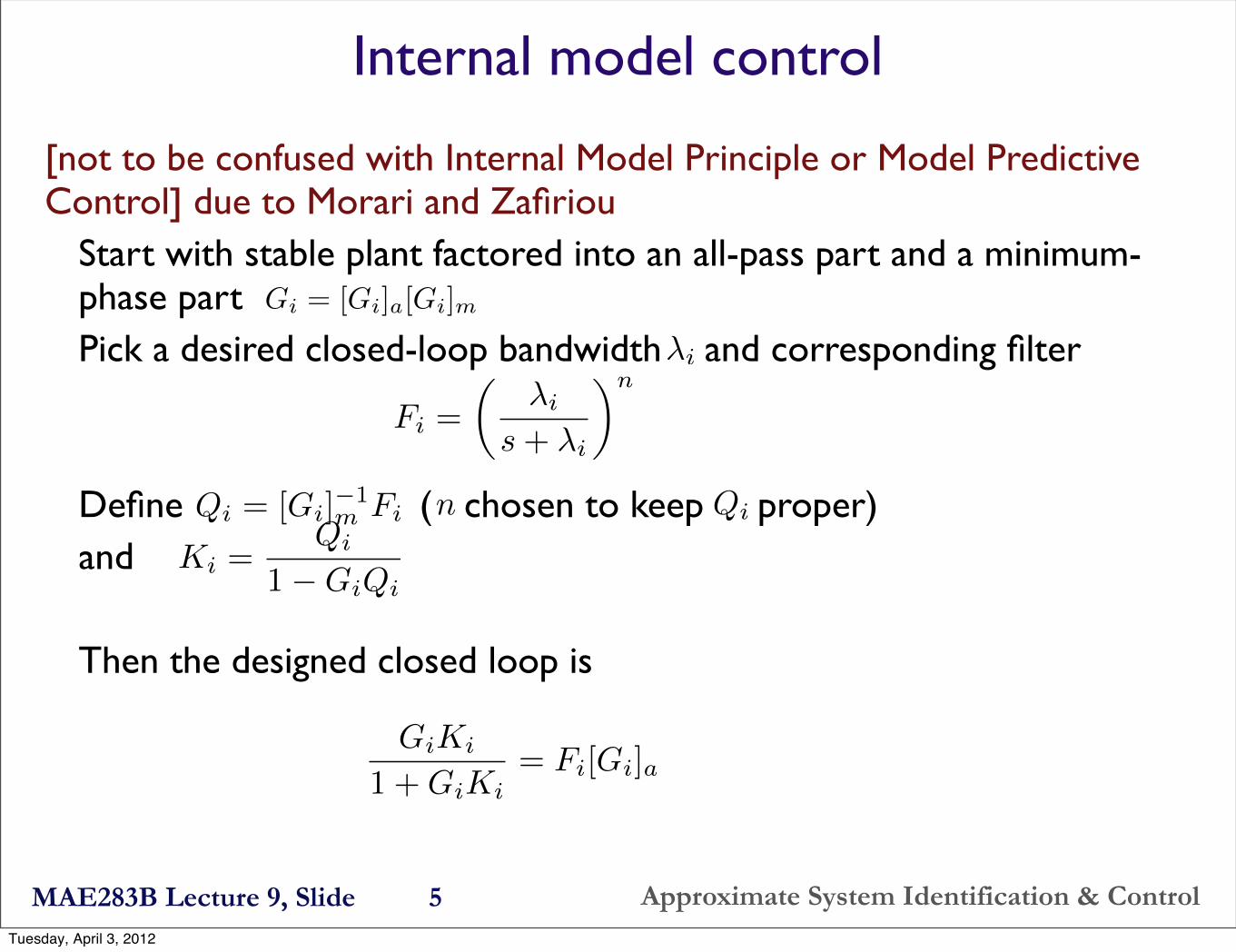
Internal model control
[not to be confused with Internal Model Principle or Model Predictive Control] due to Morari and Zafiriou
Start with stable plant factored into an all-pass part and a minimum-phase partPick a desired closed-loop bandwidth and corresponding filter
Define ( chosen to keep proper) and
Then the designed closed loop is
5
Gi = [Gi]a[Gi]m
Fi =
�λi
s+ λi
�nλi
Qi = [Gi]−1m Fi
Ki =Qi
1−GiQi
GiKi
1 +GiKi= Fi[Gi]a
n Qi
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
Coprime factor identification
6
C G0
rt ut yt
vt
−+ +
Assume we have a stable closed loop with the real plantSuppose we know another plant model which is stabilized by
Then we may write coprime factor descriptions of and
where the factors are stable proper transfer functionWithout loss of generality we can assume
Since is also stabilized by , it can be written for some stable proper transfer function
Let’s try to estimate
G0
G C
CG
G =N
DC =
X
Y
NX +DY = 1
C
G0
R
R
G0 =N +RY
D −RX
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
Coprime factor identification
Hansen, Franklin and Kosut noted the followingCreate signals and
[simple algebra yields this relation]Now fit the Youla-Kucera parameter transfer function and the noise model by minimizing the filtered prediction error
Filtered reference and data signals yield independentFreedom from bias, control-relevant
7
G =N
DC =
X
YG0 =
N +RY
D −RXKnown Find
αt = Xrt βt = Dyt −Nut
= Rαt + (D −RX)Het
Rθ
εfθ,t = Y (βt −Rθαt)
=
�G0C
1−G0C− GC
1 +GC
�rt +
1
1 +G0CH0et
(αt,βt)
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
The Zang scheme
Control design
then use the frequency-weighting trick from last lecture
HopefullyIntersperse with control-relevant modeling
based on minimizing the second term using closed-loop data and data filter
8
Jglobal(G0, C) = limN→∞
1
N
N�
t=1
y2t+ γu
2t=
�����
H01+G0C
γ1/2 C
1+G0CH0
�����2
Jlocal(Gθ, C) = limN→∞
1
N
N�
t=1
y2t+ γu
2t=
�����
Hθ1+GθC
γ1/2 C
1+GθCHθ
�����2
JF
local(Gθ, C) = limN→∞
1
N
N�
t=1
(Fy)2t+ γ(Fu)2
t=
�����
HθF
1+GθC
γ1/2 C
1+GθCHθF
�����2
JFlocal(Gθ, C) → Jglobal(G0, C)
�����
H01+G0C
γ1/2 C
1+G0CH0
�����2
≤
�����
Hθ1+GθC
γ1/2 C
1+GθCHθ
�����2
+
�����
�H0
1+G0C
γ1/2 C
1+G0CH0
�−�
Hθ1+GθC
γ1/2 C
1+GθCHθ
������2
|Lθ|2 = (1 + γ|C|2)����
Hθ
1 +GθC
����2
Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
References
Pedro Albertos & Antonio Sala, Iterative Identification & Control, Springer 2002
Chapters on Windsurfer & Zang schemes,control-relevant identification, sugar mill, CD player, wafer stepper applications
Hakvoort, Schrama & Van den Hof, “Approximate identification with closed-loop performance criterion and application to LQG feedback design,” Automatica, vol. 30, pp. 679-690, 1994
Gevers & Ljung, “Optimal experiment designs with respect to the intended model application,” Automatica, vol. 22, pp. 543-554, 1986
Zang, Bitmead & Gevers, “Iterative weighted least-squares identification and weighted LQG control design,” Automatica, vol. 31, pp.1577-1594
Lee, Anderson, Kosut & Mareels, “A new approach to adaptive robust control,” International Journal of Adaptive Control & Signal Processing, vol. 7, pp. 183-211, 1993
Schrama, “Accurate identification for control: the necessity of an iterative scheme,” IEEE Transactions on Automatic Control, vol 37, pp.991-994, 1992
9Tuesday, April 3, 2012

Approximate System Identification & ControlMAE283B Lecture 9, Slide
Local time-line1986 - Michel Gevers at the Australian National University
Review of Clarke, Mohtadi & Tuffs GPC papers
1988 - Bob on sabbatical at University of Louvain, Belgium, visits to Van den Hof, Schrama, Hakvoort in Delft
Draft of book “Adaptive Optimal Control: the Thinking Man’s GPC”
1989 - Started working with CSR Sugar at Victoria Mill
1990 - The George Polya moment
1990 - The Thinking Man’s book appears
1990/1 - Ari Partanen employed at Victoria Mill
1991 - First European Control Conference Grenoble. Bitmead & Zang “An iterative identification and control strategy”
Train ride (pre-TGV) from Grenoble to Brussels with Michel Gevers
20-page fax to Zhuquan Zang
Discussions with Robert Kosut, co-editor of IEEE Trans AC special issue
1993 - Ari comes to ANU as a PhD student ... still has the passwords to CSR computers, experiments on the sugar mill
1993 - Raymond de Callafon, Paul Van den Hof and Okko Bosgra experiment on iterative identification and control on Philips CD player and ASML wafer stepper
1995 - Iterative Feedback Tuning ideas appear
1995 - Zang (theory) and Ari (application) papers appear in the same issue of Automatica
1999 - Pedro Albertos arranges a workshop in Valencia
Leads to publication of the book “Iterative identification and control” 2002
1999 + - Lots of good work by Anderson, Gevers, Kosut, etc on cautious control
10Tuesday, April 3, 2012