Lecture 7: Finding Features (part 2/2)vision.stanford.edu/teaching/cs131_fall1617/... · Fei-Fei Li...
47
Lecture 7 - Fei-Fei Li Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei-Fei Li Stanford Vision Lab 17-Oct-16 1
Transcript of Lecture 7: Finding Features (part 2/2)vision.stanford.edu/teaching/cs131_fall1617/... · Fei-Fei Li...

Lecture 7 - Fei-Fei Li
Lecture7:FindingFeatures(part2/2)
Dr.JuanCarlosNieblesStanfordAILab
ProfessorFei-FeiLiStanfordVisionLab
17-Oct-161

Lecture 7 - Fei-Fei Li
Whatwewilllearntoday?
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-162
Previouslecture(#6)
Somebackgroundreading:DavidLowe,IJCV2004

Lecture 7 - Fei-Fei Li
Aquickreview
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-163

Lecture 7 - Fei-Fei Li
GeneralApproachN
pix
els
N pixels
Similarity measure Af
e.g. color
Bf
e.g. color
B1B2
B3A1
A2 A3
Tffd BA <),(
1. Find a set of distinctive key- points
3. Extract and normalize the region content
2. Define a region around each keypoint
4. Compute a local descriptor from the normalized region
5. Match local descriptors
Slid
e cr
edit
: Ba
stia
n Le
ibe
17-Oct-164
Lecture 7 - Fei-Fei Li
Aquickreview
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-165
Lecture 7 - Fei-Fei Li
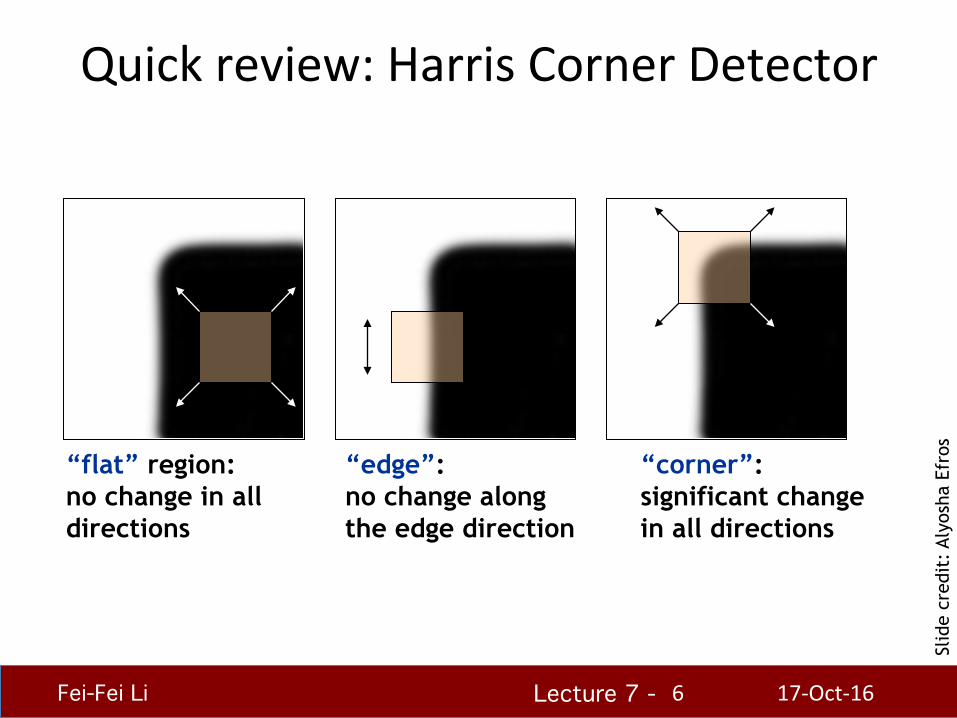
Quickreview:HarrisCornerDetector
17-Oct-166
“edge”: no change along the edge direction
“corner”: significant change in all directions
“flat” region: no change in all directions
Slid
e cr
edit
: Al
yosh
a Ef
ros

Lecture 7 - Fei-Fei Li
Quickreview:HarrisCornerDetector
17-Oct-167
• FastapproximaOon– AvoidcompuOngtheeigenvalues
– α:constant(0.04to0.06)
θ = det(M )−α trace(M )2 = λ1λ2 −α(λ1 +λ2 )2
Slid
e cr
edit
: Kr
iste
n G
raum
an
“Corner” θ > 0
“Edge” θ < 0
“Edge” θ < 0
“Flat”region
�1
Lecture 7 - Fei-Fei Li
Quickreview:HarrisCornerDetector
17-Oct-168
Slid
e ad
apte
d fr
om D
arya
Fro
lova
, D
enis
Sim
akov
Lecture 7 - Fei-Fei Li
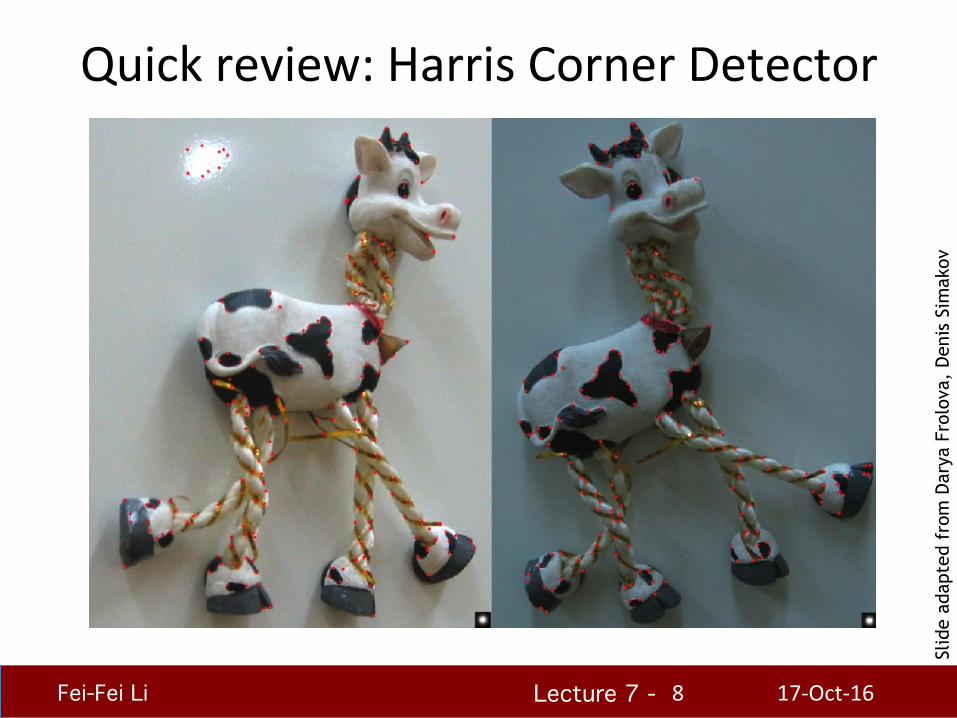
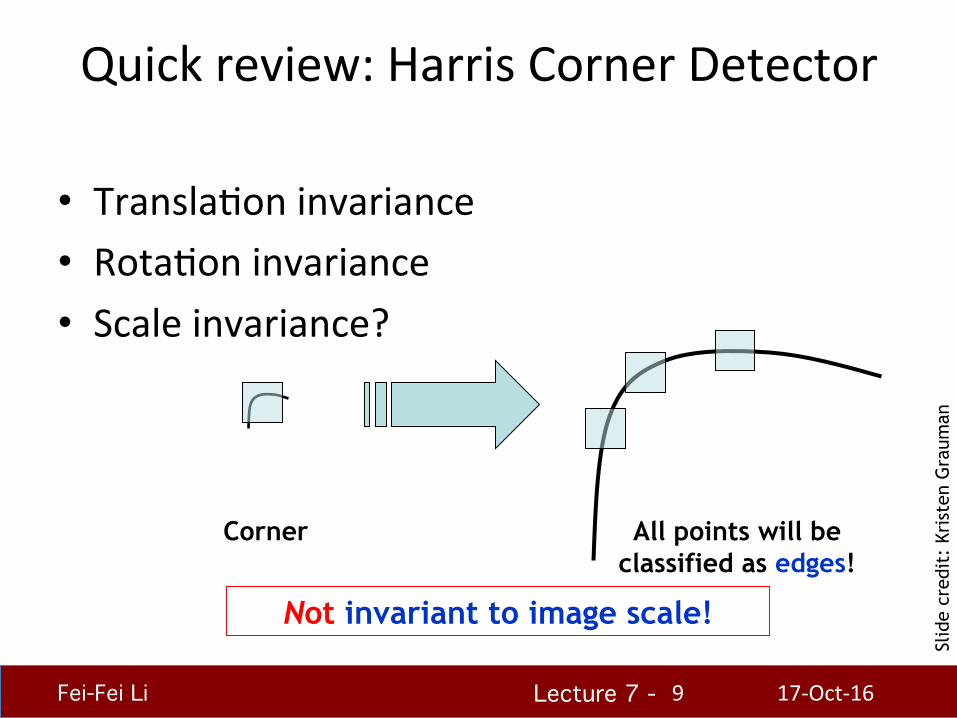
Quickreview:HarrisCornerDetector
17-Oct-169
• TranslaOoninvariance• RotaOoninvariance• Scaleinvariance?
Not invariant to image scale!
All points will be classified as edges!
Corner
Slid
e cr
edit
: Kr
iste
n G
raum
an

Lecture 7 - Fei-Fei Li
Whatwewilllearntoday?
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-1610
Lecture 7 - Fei-Fei Li
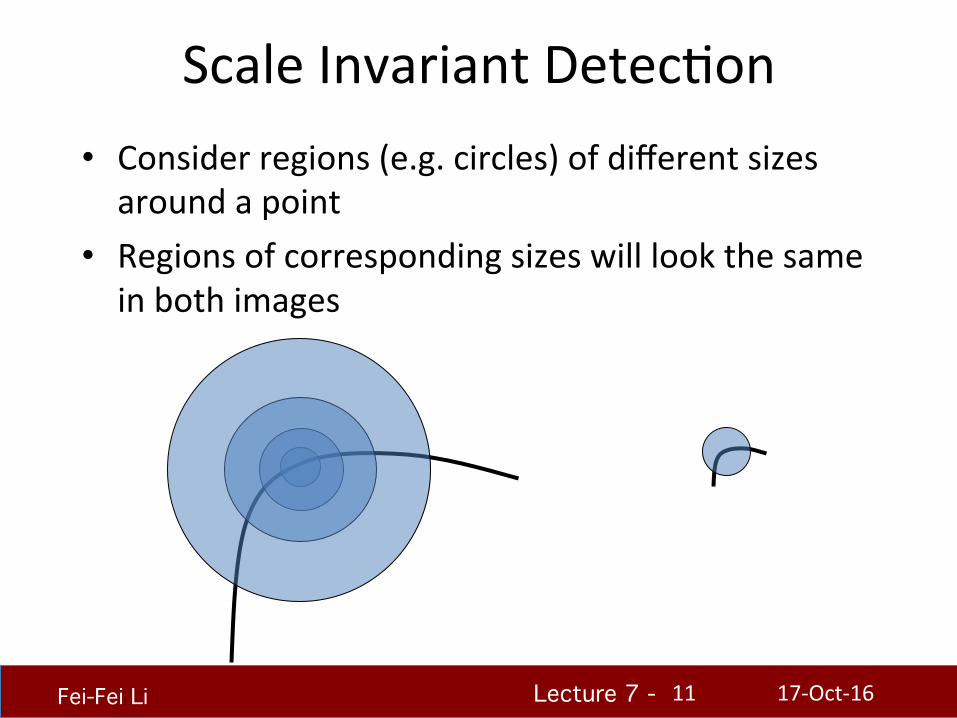
ScaleInvariantDetecOon• Considerregions(e.g.circles)ofdifferentsizesaroundapoint
• Regionsofcorrespondingsizeswilllookthesameinbothimages
17-Oct-1611

Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon
• Theproblem:howdowechoosecorrespondingcirclesindependentlyineachimage?
17-Oct-1612

Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon• SoluOon:
– DesignafuncOonontheregion(circle),whichis“scaleinvariant”(thesameforcorrespondingregions,eveniftheyareatdifferentscales)
Example:averageintensity.Forcorrespondingregions(evenofdifferentsizes)itwillbethesame.
scale = 1/2
– Forapointinoneimage,wecanconsideritasafuncOonofregionsize(circleradius)
f
region size
Image 1 f
region size
Image 2
17-Oct-1613

Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon• Commonapproach:
scale = 1/2
f
region size
Image 1 f
region size
Image 2
TakealocalmaximumofthisfuncOon
• ObservaOon:regionsize,forwhichthemaximumisachieved,shouldbeco-variantwithimagescale.
s1 s2
Important: this scale invariant region size is found in each image independently!
17-Oct-1614

Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon
• A“good”funcOonforscaledetecOon:hasonestablesharppeak
f
region size
bad
f
region size
bad
f
region size
Good !
• Forusualimages:agoodfuncOonwouldbeonewhichrespondstocontrast(sharplocalintensitychange)
17-Oct-1615

Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon• FuncOonsfordeterminingscale
2 2
21 22
( , , )x y
G x y e σπσ
σ+−
=
( )2 ( , , ) ( , , )xx yyL G x y G x yσ σ σ= +
( , , ) ( , , )DoG G x y k G x yσ σ= −
Kernel Imagef = ∗Kernels:
where Gaussian
Note: both kernels are invariant to scale and rotation
(Laplacian)
(Difference of Gaussians)
17-Oct-1616

Lecture 7 - Fei-Fei Li
ScaleInvariantDetectors• Harris-Laplacian1
Findlocalmaximumof:– Harriscornerdetectorinspace(imagecoordinates)
– Laplacianinscale
1K.Mikolajczyk,C.Schmid.“IndexingBasedonScaleInvariantInterestPoints”.ICCV20012D.Lowe.“DisOncOveImageFeaturesfromScale-InvariantKeypoints”.IJCV2004
scale
x
y
� Harris �
� L
apla
cian
�
• SIFT(Lowe)2Findlocalmaximumof:– DifferenceofGaussiansinspace
andscale
scale
x
y
� DoG �
� D
oG �
17-Oct-1617

Lecture 7 - Fei-Fei Li
ScaleInvariantDetectors
K.Mikolajczyk, C.Schmid. “Indexing Based on Scale Invariant Interest Points”. ICCV 2001
• ExperimentalevaluaOonofdetectorsw.r.t.scalechange
Repeatability rate: # correspondences # possible correspondences
17-Oct-1618
Lecture 7 - Fei-Fei Li
ScaleInvariantDetecOon:Summary
• Given:twoimagesofthesamescenewithalargescaledifferencebetweenthem
• Goal:findthesameinterestpointsindependentlyineachimage
• SoluOon:searchformaximaofsuitablefuncOonsinscaleandinspace(overtheimage)
Methods:
1. Harris-Laplacian [Mikolajczyk, Schmid]: maximize Laplacian over scale, Harris’ measure of corner response over the image
2. SIFT [Lowe]: maximize Difference of Gaussians over scale and space
17-Oct-1619

Lecture 7 - Fei-Fei Li
Whatwewilllearntoday?
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-1620

Lecture 7 - Fei-Fei Li
LocalDescriptors• Weknowhowtodetectpoints• NextquesOon:
Howtodescribethemformatching?
? Point descriptor should be:
1. Invariant 2. Distinctive Sl
ide
cred
it:
Kris
ten
Gra
uman
17-Oct-1621

Lecture 7 - Fei-Fei Li
CVPR2003Tutorial
Recogni5onandMatchingBasedonLocalInvariantFeatures
DavidLoweComputerScienceDepartmentUniversityofBriOshColumbia
17-Oct-1622

Lecture 7 -
InvariantLocalFeatures
• ImagecontentistransformedintolocalfeaturecoordinatesthatareinvarianttotranslaOon,rotaOon,scale,andotherimagingparameters
17-Oct-1623
Lecture 7 - Fei-Fei Li
Advantagesofinvariantlocalfeatures• Locality:featuresarelocal,sorobusttoocclusionandclumer(nopriorsegmentaOon)
• Dis5nc5veness:individualfeaturescanbematchedtoalargedatabaseofobjects
• Quan5ty:manyfeaturescanbegeneratedforevensmallobjects
• Efficiency:closetoreal-Omeperformance
• Extensibility:caneasilybeextendedtowiderangeofdifferingfeaturetypes,witheachaddingrobustness
17-Oct-1624

Lecture 7 -
ScaleinvarianceRequiresamethodtorepeatablyselectpointsinloca5on
andscale:• Theonlyreasonablescale-spacekernelisaGaussian
(Koenderink,1984;Lindeberg,1994)• Anefficientchoiceistodetectpeaksinthedifferenceof
Gaussianpyramid(Burt&Adelson,1983;Crowley&Parker,1984–butexaminingmorescales)
• Difference-of-GaussianwithconstantraOoofscalesisacloseapproximaOontoLindeberg’sscale-normalizedLaplacian(canbeshownfromtheheatdiffusionequaOon)
Blur
Resample
Subtract
Blur
Resample
Subtract
17-Oct-16
Lecture 7 - Fei-Fei Li
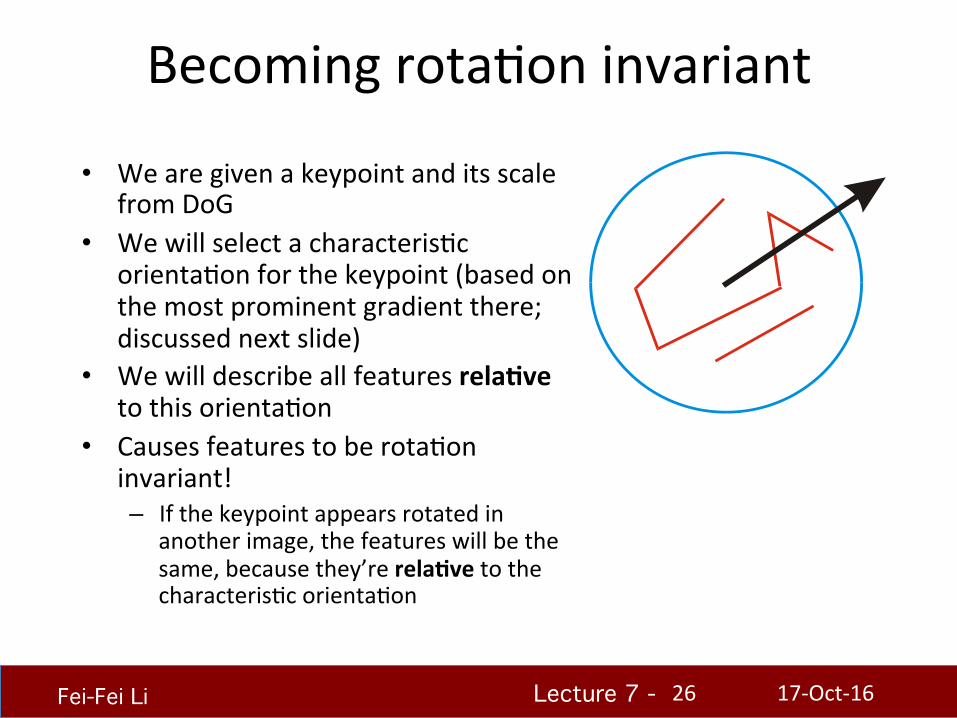
BecomingrotaOoninvariant
• WearegivenakeypointanditsscalefromDoG
• WewillselectacharacterisOcorientaOonforthekeypoint(basedonthemostprominentgradientthere;discussednextslide)
• Wewilldescribeallfeaturesrela5vetothisorientaOon
• CausesfeaturestoberotaOoninvariant!– Ifthekeypointappearsrotatedin
anotherimage,thefeatureswillbethesame,becausethey’rerela5vetothecharacterisOcorientaOon
0 2π
17-Oct-1626
Lecture 7 - Fei-Fei Li
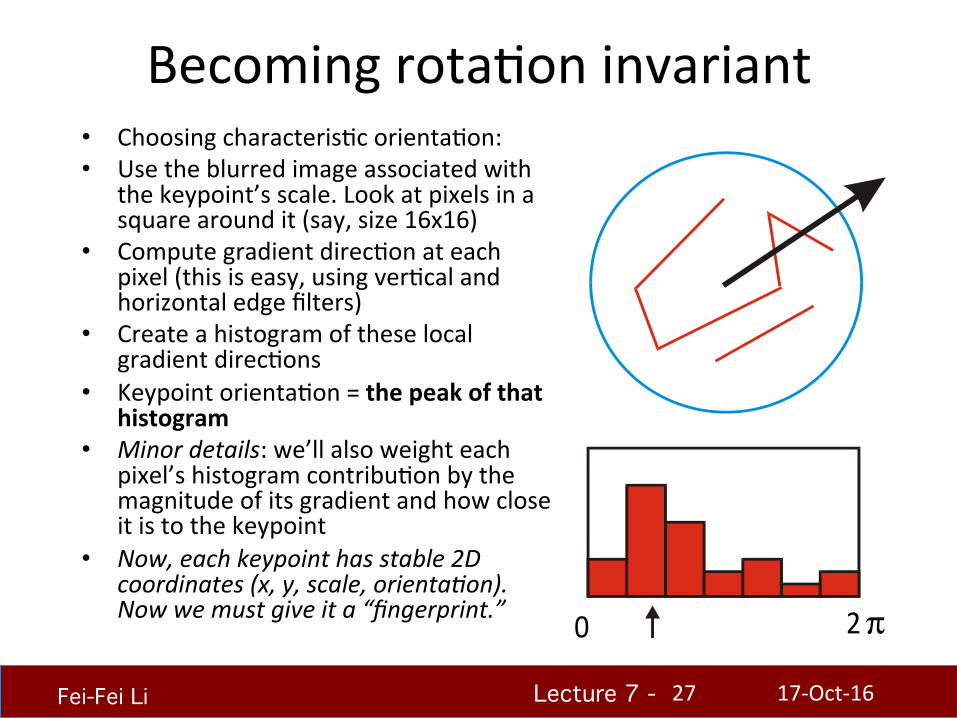
BecomingrotaOoninvariant• ChoosingcharacterisOcorientaOon:• Usetheblurredimageassociatedwith
thekeypoint’sscale.Lookatpixelsinasquarearoundit(say,size16x16)
• ComputegradientdirecOonateachpixel(thisiseasy,usingverOcalandhorizontaledgefilters)
• CreateahistogramoftheselocalgradientdirecOons
• KeypointorientaOon=thepeakofthathistogram
• Minordetails:we’llalsoweighteachpixel’shistogramcontribuOonbythemagnitudeofitsgradientandhowcloseitistothekeypoint
• Now,eachkeypointhasstable2Dcoordinates(x,y,scale,orientaBon).Nowwemustgiveita“fingerprint.” 0 2π
17-Oct-1627
Lecture 7 - Fei-Fei Li
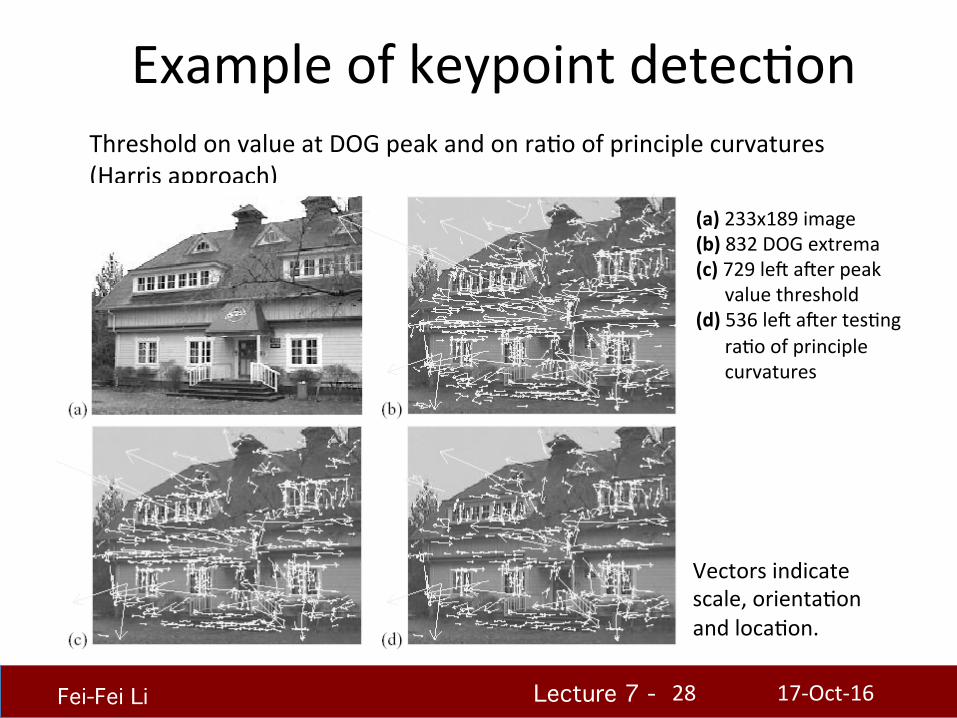
ExampleofkeypointdetecOonThresholdonvalueatDOGpeakandonraOoofprinciplecurvatures(Harrisapproach)
(a)233x189image(b)832DOGextrema(c)729letaterpeakvaluethreshold(d)536letatertesOngraOoofprinciplecurvatures
17-Oct-1628
Vectorsindicatescale,orientaOonandlocaOon.
Lecture 7 - Fei-Fei Li
SIFTdescriptorformaOon
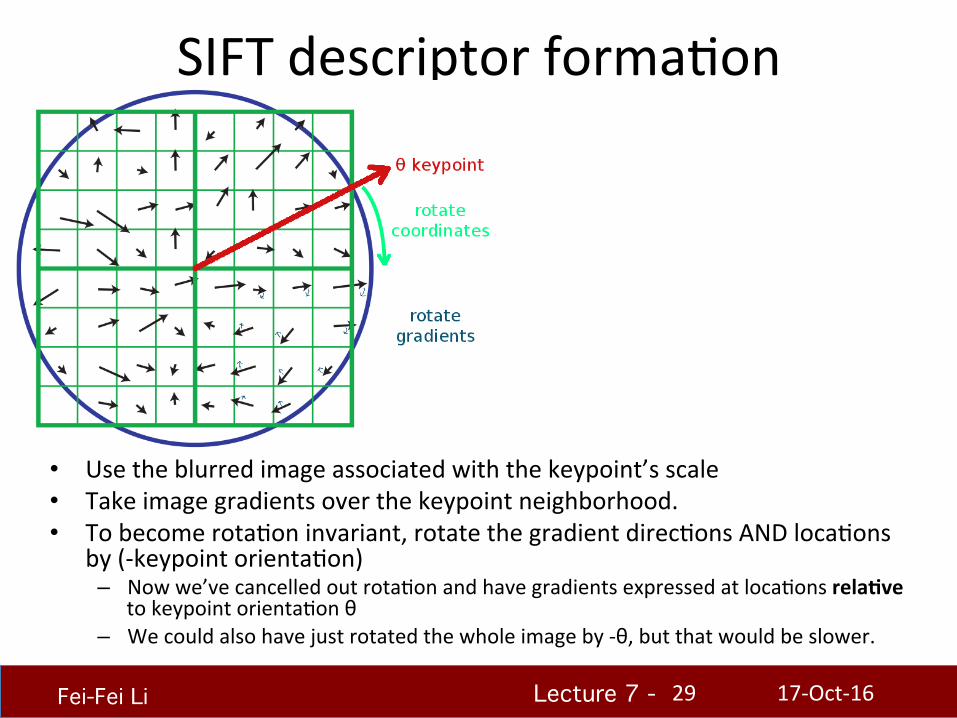
• Usetheblurredimageassociatedwiththekeypoint’sscale• Takeimagegradientsoverthekeypointneighborhood.• TobecomerotaOoninvariant,rotatethegradientdirecOonsANDlocaOons
by(-keypointorientaOon)– Nowwe’vecancelledoutrotaOonandhavegradientsexpressedatlocaOonsrela5ve
tokeypointorientaOonθ– Wecouldalsohavejustrotatedthewholeimageby-θ,butthatwouldbeslower.
17-Oct-1629

Lecture 7 - Fei-Fei Li
SIFTdescriptorformaOon
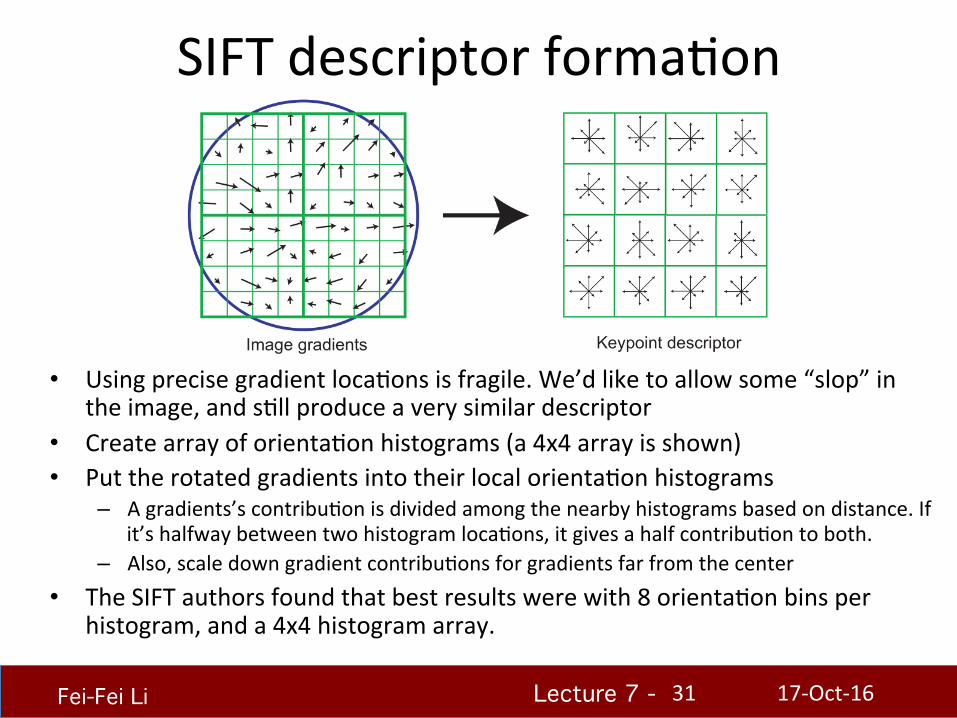
• UsingprecisegradientlocaOonsisfragile.We’dliketoallowsome“slop”intheimage,andsOllproduceaverysimilardescriptor
• CreatearrayoforientaOonhistograms(a4x4arrayisshown)• PuttherotatedgradientsintotheirlocalorientaOonhistograms
– Agradients’scontribuOonisdividedamongthenearbyhistogramsbasedondistance.Ifit’shalfwaybetweentwohistogramlocaOons,itgivesahalfcontribuOontoboth.
– Also,scaledowngradientcontribuOonsforgradientsfarfromthecenter• TheSIFTauthorsfoundthatbestresultswerewith8orientaOonbinsper
histogram,anda4x4histogramarray.
17-Oct-1630
0 2 p
Lecture 7 - Fei-Fei Li
SIFTdescriptorformaOon
• UsingprecisegradientlocaOonsisfragile.We’dliketoallowsome“slop”intheimage,andsOllproduceaverysimilardescriptor
• CreatearrayoforientaOonhistograms(a4x4arrayisshown)• PuttherotatedgradientsintotheirlocalorientaOonhistograms
– Agradients’scontribuOonisdividedamongthenearbyhistogramsbasedondistance.Ifit’shalfwaybetweentwohistogramlocaOons,itgivesahalfcontribuOontoboth.
– Also,scaledowngradientcontribuOonsforgradientsfarfromthecenter• TheSIFTauthorsfoundthatbestresultswerewith8orientaOonbinsper
histogram,anda4x4histogramarray.
17-Oct-1631

Lecture 7 - Fei-Fei Li
SIFTdescriptorformaOon
• 8orientaOonbinsperhistogram,anda4x4histogramarray,yields8x4x4=128numbers.
• SoaSIFTdescriptorisalength128vector,whichisinvarianttorotaOon(becausewerotatedthedescriptor)andscale(becauseweworkedwiththescaledimagefromDoG)
• WecancompareeachvectorfromimageAtoeachvectorfromimageBtofindmatchingkeypoints!– Euclidean“distance”betweendescriptorvectorsgivesagoodmeasure
ofkeypointsimilarity
17-Oct-1632

Lecture 7 - Fei-Fei Li
SIFTdescriptorformaOon
• AddingrobustnesstoilluminaOonchanges:• Rememberthatthedescriptorismadeofgradients(differences
betweenpixels),soit’salreadyinvarianttochangesinbrightness(e.g.adding10toallimagepixelsyieldstheexactsamedescriptor)
• Ahigher-contrastphotowillincreasethemagnitudeofgradientslinearly.So,tocorrectforcontrastchanges,normalizethevector(scaletolength1.0)
• Verylargeimagegradientsareusuallyfromunreliable3DilluminaOoneffects(glare,etc).So,toreducetheireffect,clampallvaluesinthevectortobe≤0.2(anexperimentallytunedvalue).Thennormalizethevectoragain.
• ResultisavectorwhichisfairlyinvarianttoilluminaOonchanges.
17-Oct-1633

Lecture 7 - Fei-Fei Li
Repeatabilityvsnumberofscalessampledperoctave
DavidG.Lowe,"DisOncOveimagefeaturesfromscale-invariantkeypoints,"InternaOonalJournalofComputerVision,60,2(2004),pp.91-110
17-Oct-1634

Lecture 7 - Fei-Fei Li
SensiOvitytonumberofhistogramorientaOons
17-Oct-1635
DavidG.Lowe,"DisOncOveimagefeaturesfromscale-invariantkeypoints,"InternaOonalJournalofComputerVision,60,2(2004),pp.91-110

Lecture 7 - Fei-Fei Li
Featurestabilitytonoise• Matchfeaturesaterrandomchangeinimagescale&
orientaOon,withdifferinglevelsofimagenoise• Findnearestneighborindatabaseof30,000features
17-Oct-1636
Lecture 7 - Fei-Fei Li
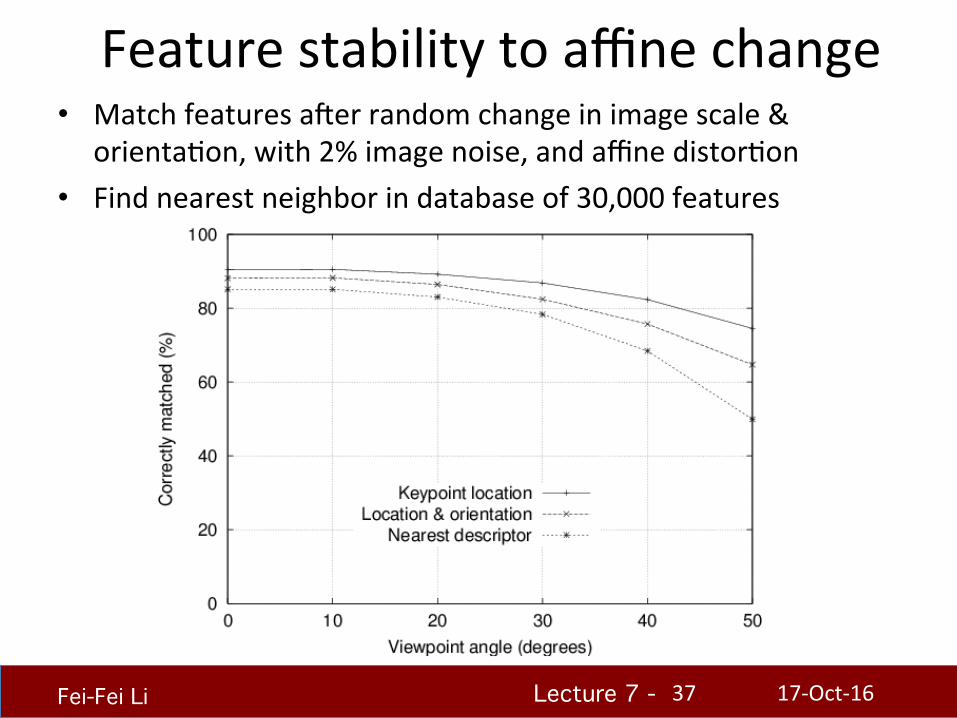
Featurestabilitytoaffinechange• Matchfeaturesaterrandomchangeinimagescale&
orientaOon,with2%imagenoise,andaffinedistorOon• Findnearestneighborindatabaseof30,000features
17-Oct-1637
Lecture 7 - Fei-Fei Li
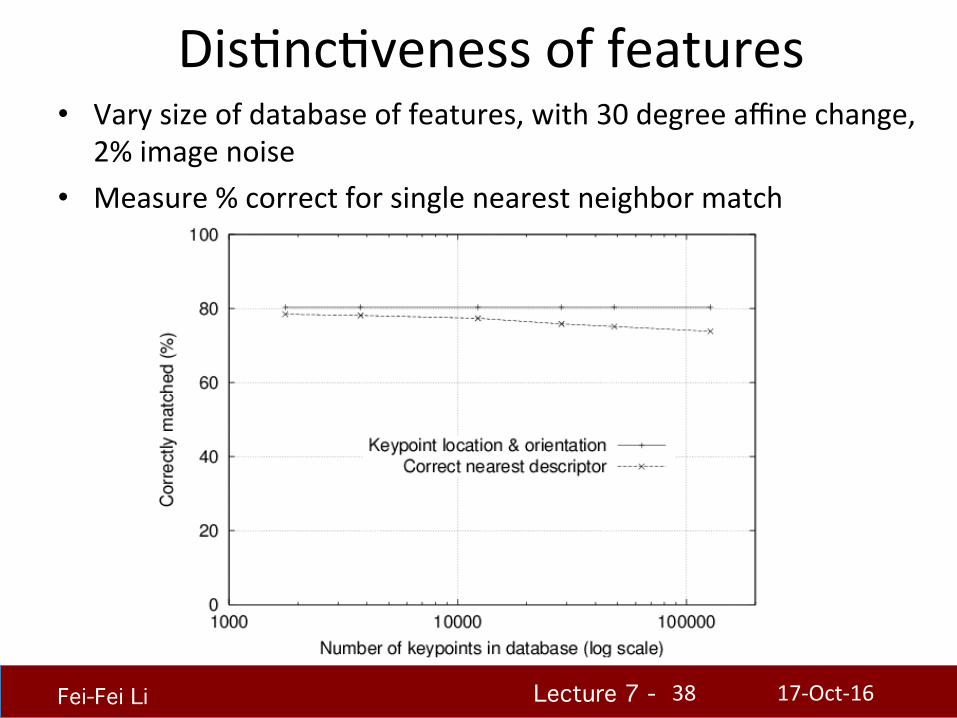
DisOncOvenessoffeatures• Varysizeofdatabaseoffeatures,with30degreeaffinechange,
2%imagenoise• Measure%correctforsinglenearestneighbormatch
17-Oct-1638

Lecture 7 - Fei-Fei Li
RaOoofdistancesreliableformatching
17-Oct-1639

Lecture 7 - Fei-Fei Li 17-Oct-1640
Lecture 7 - Fei-Fei Li 17-Oct-1641

Lecture 7 - Fei-Fei Li
NiceSIFTresources
• VLFeattoolbox:– hmp://www.vlfeat.org/overview/sit.html
• anonlinetutorial:hmp://www.aishack.in/2010/05/sit-scale-invariant-feature-transform/
• Wikipedia:hmp://en.wikipedia.org/wiki/Scale-invariant_feature_transform
17-Oct-1642

Lecture 7 - Fei-Fei Li
ApplicaOonsoflocalinvariantfeatures
• Widebaselinestereo• MoOontracking• Panoramas• MobilerobotnavigaOon• 3DreconstrucOon• RecogniOon• …

Lecture 7 - Fei-Fei Li
AutomaOcmosaicing
hmp://www.cs.ubc.ca/~mbrown/autosOtch/autosOtch.html
Lecture 7 - Fei-Fei Li
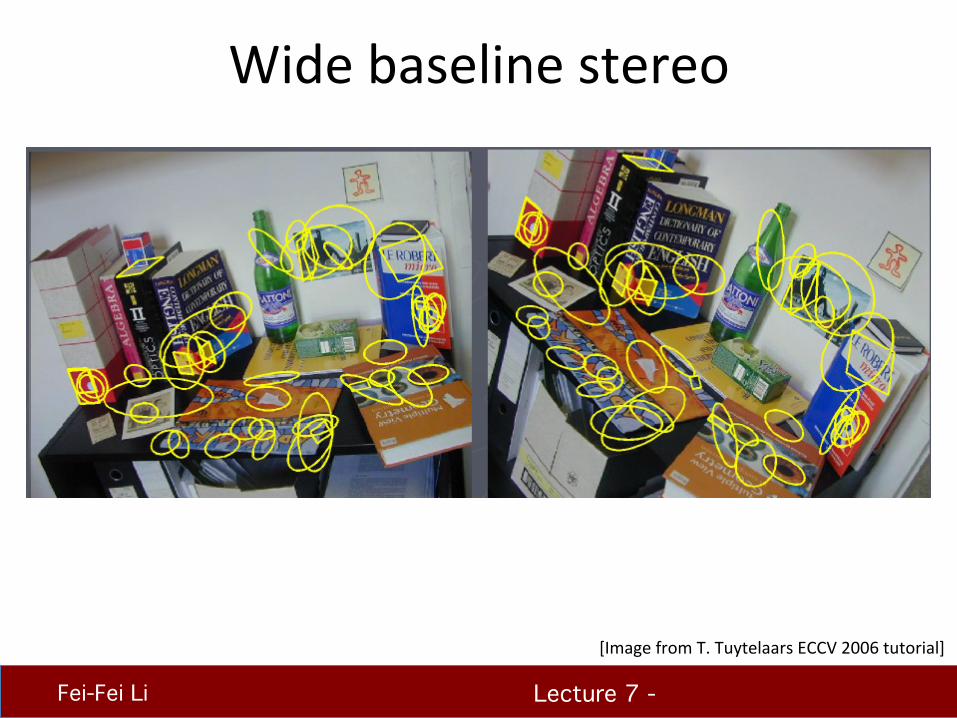
Widebaselinestereo
[ImagefromT.TuytelaarsECCV2006tutorial]

Lecture 7 - Fei-Fei Li
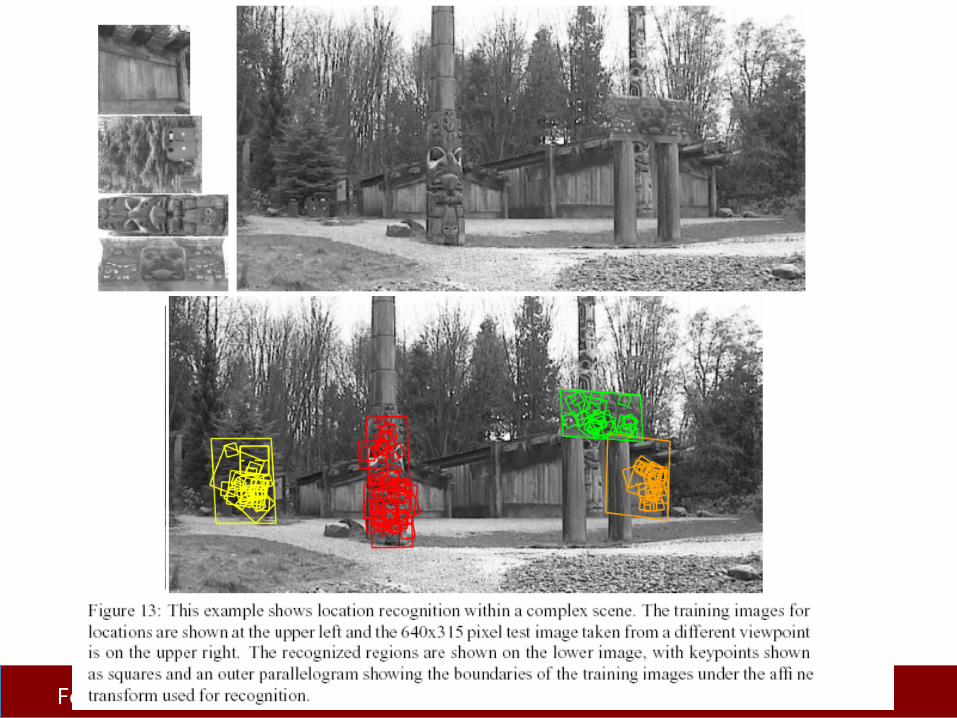
RecogniOonofspecificobjects,scenes
Rothganger et al. 2003 Lowe 2002
Schmid and Mohr 1997 Sivic and Zisserman, 2003

Lecture 7 - Fei-Fei Li
Whatwehavelearnedthisweek?
• Localinvariantfeatures– MoOvaOon– Requirements,invariances
• KeypointlocalizaOon– Harriscornerdetector
• ScaleinvariantregionselecOon– AutomaOcscaleselecOon– Difference-of-Gaussian(DoG)detector
• SIFT:animageregiondescriptor
17-Oct-1647
Previouslecture(#6)
today(#7)
Somebackgroundreading:R.Szeliski,Ch4.1.1;DavidLowe,IJCV2004