

Lecture 6: Edge Detection - University of...
106
Transcript of Lecture 6: Edge Detection - University of...

ME5286 – Lecture 6
Review From Last Lecture
• Options for Image Representation– Introduced the concept of different
representation or transformation• Fourier Transform
– Opportunity of manipulate, process and analyze the image in a frequency domain
• Frequency Domain Filtering– Can be more efficient in certain cases
#2

ME5286 – Lecture 6
Frequency Domain Methods
Spatial DomainFrequency Domain

ME5286 – Lecture 6
Major filter categories
• Typically, filters are classified by examining their properties in the frequency domain:
(1) Low-pass (2) High-pass (3) Band-pass (4) Band-stop

ME5286 – Lecture 6
Example
Original signal
Low-pass filtered
High-pass filtered
Band-pass filtered
Band-stop filtered

ME5286 – Lecture 6
Low-pass filters (i.e., smoothing filters)
• Preserve low frequencies - useful for noise suppression
frequency domain time domain
Example:
ME5286 – Lecture 6
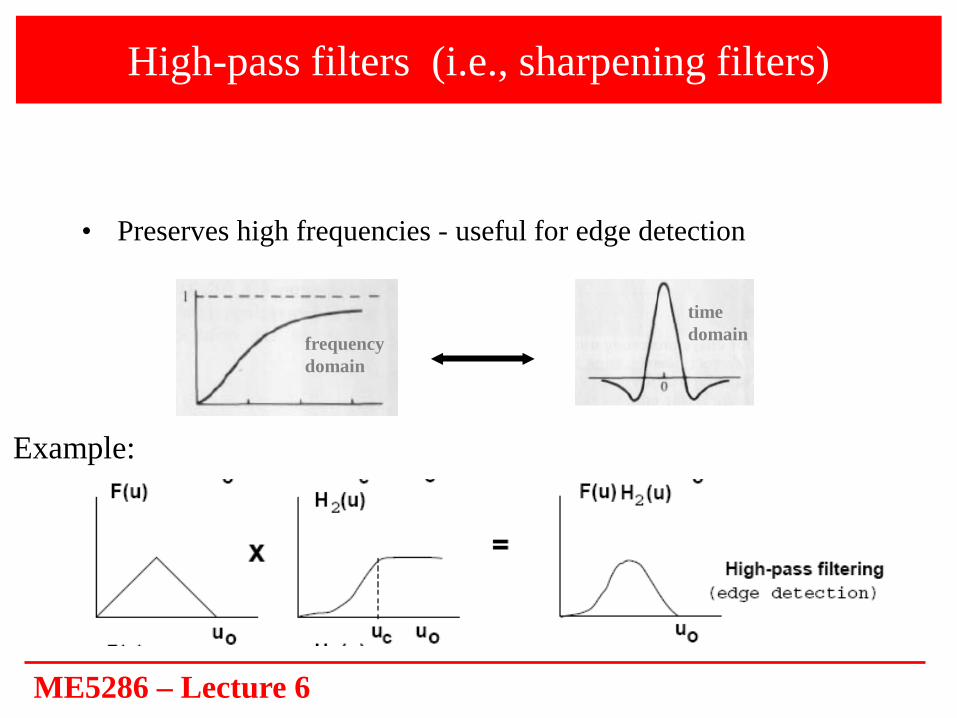
High-pass filters (i.e., sharpening filters)
• Preserves high frequencies - useful for edge detection
frequency domain
timedomain
Example:

ME5286 – Lecture 6
Band-pass filters
• Preserves frequencies within a certain band
frequency domain
timedomain
Example:

ME5286 – Lecture 6
Band-stop filters
• How do they look like?Band-pass Band-stop

ME5286 – Lecture 6
Frequency Domain Methods
Case 1: H(u,v) is specified inthe frequency domain.
Case 2: h(x,y) is specified inthe spatial domain.

ME5286 – Lecture 6
Frequency domain filtering: steps
F(u,v) = R(u,v) + jI(u,v)
ME5286 – Lecture 6
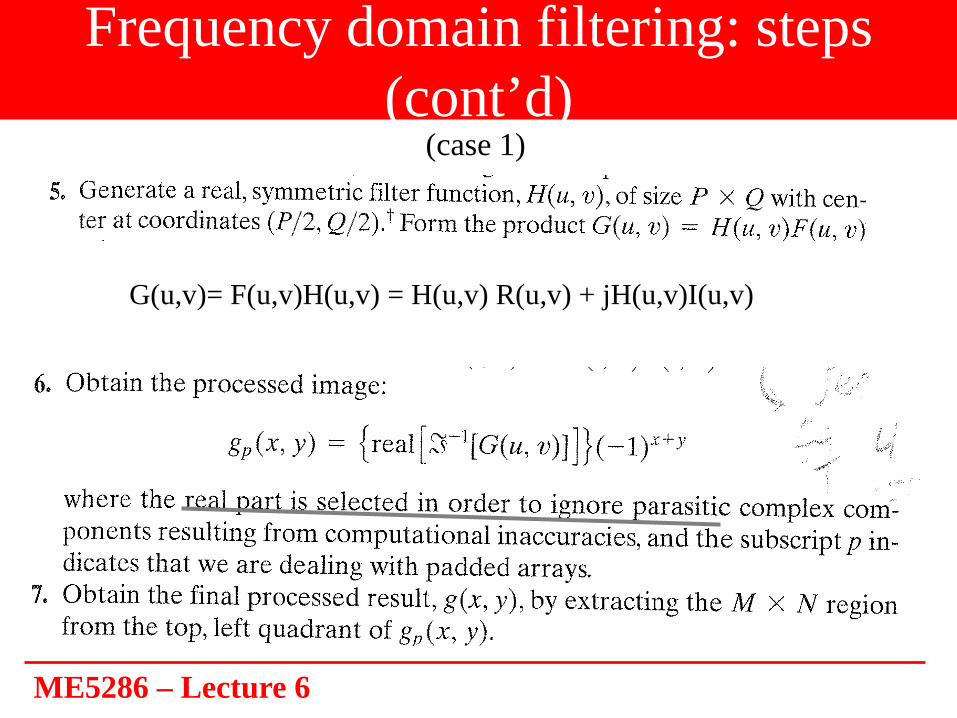
Frequency domain filtering: steps (cont’d)
G(u,v)= F(u,v)H(u,v) = H(u,v) R(u,v) + jH(u,v)I(u,v)
(case 1)

ME5286 – Lecture 6
Example
f(x,y) fp(x,y) fp(x,y)(-1)x+y
F(u,v)H(u,v) - centered G(u,v)=F(u,v)H(u,v)
g(x,y)gp(x,y)

ME5286 – Lecture 6
h(x,y) specified in spatial domain:how to generate H(u,v) from h(x,y)?
• If h(x,y) is given in the spatial domain (case 2), we can generate H(u,v) as follows:
1.Form hp(x,y) by padding with zeroes.
2. Multiply by (-1)x+y to center its spectrum.
3. Compute its DFT to obtain H(u,v)

ME5286 – Lecture 6
Edge Detection
• Definition of an Edge• Edge Modeling and Edge Descriptors• Edge Detection Methods
– First and Second Derivative Approximations
#15

ME5286 – Lecture 6
Image Segmentation• Image segmentation methods will look for objects
that either have some measure of homogeneitywithin themselves, or have some measure of contrast with the objects on their border
• The homogeneity and contrast measures can include features such as gray level, color, and texture
#16

ME5286 – Lecture 6
Edge Detection: First Step to Image Segmentation
• The goal of image segmentation is to find regions that represent objects or meaningful parts of objects
• Division of the image into regions corresponding to objects of interest is necessary for scene interpretation and understanding
• Identification of real objects, pseudo-objects, shadows, or actually finding anything of interest within the image, requires some form of segmentation
#17

ME5286 – Lecture 6
Image Edges
Image Features that are Local, meaningful, detectable parts of the image.
#18

ME5286 – Lecture 6
Edge Detection Objectives
• Edge detection operators are used as a first step in the line (or curve) detection process.
• Edge detection is also used to find complex object boundaries by marking potential edge points corresponding to places in an image where rapid changes in brightness occur
#19

ME5286 – Lecture 6
Edge Detection Objectives
• After the edge points have been marked, they can be merged to form a line/curves or object outlines
• A curve is a continuous collection of edge points along a certain direction
• Different methods can use the edge information to construct meaningful regions for image analysis
#20

ME5286 – Lecture 6
Edges & Lines Relationship
Edge
Line
Edge
The line shown here is vertical and the edge direction is horizontal. In this case the transition from black to white occurs along a row, this is the edge direction, but the line is vertical along a column.
Edges and lines are perpendicular
#21

ME5286 – Lecture 6
Definition of Edges
• Edges are significant local changes of intensity in an image.

ME5286 – Lecture 6
Why is Edge Detection Useful?
• Important features can be extracted from the edges of an image (e.g., corners, lines, curves).
• These features are used by higher-level computer vision algorithms (e.g., recognition).

ME5286 – Lecture 6
Goals of Edge Detection• Goal of Edge Detection
– Produce a line drawing of a scene from an image of that scene.
– Important features can be extracted from the edges of an image (e.g., corners, lines, curves).
– These features are used by higher-level computer vision algorithms (e.g., segmentation, recognition).
#24

ME5286 – Lecture 6
Challenges: Effect of Illumination

ME5286 – Lecture 6
Goals of an Edge Detector
• Goal to construct edge detection operators that extracts– the orientation information (information about the
direction of the edge) and – the strength of the edge. Some methods can return information about the existence of an edge at each point for faster processing
#26
ME5286 – Lecture 6
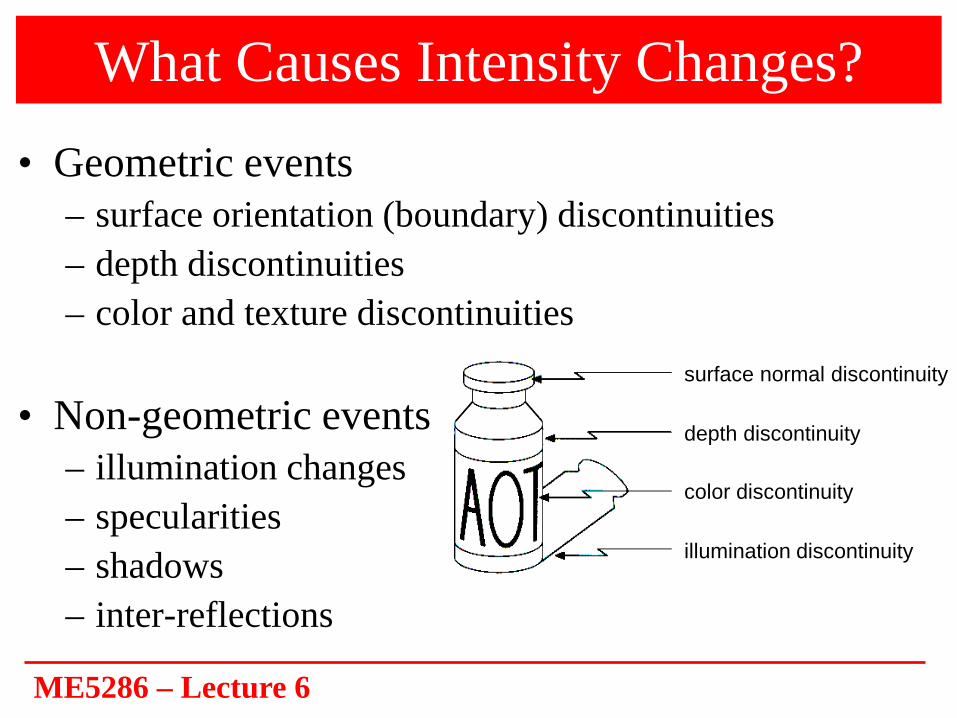
What Causes Intensity Changes?• Geometric events
– surface orientation (boundary) discontinuities– depth discontinuities– color and texture discontinuities
• Non-geometric events– illumination changes– specularities– shadows– inter-reflections
depth discontinuity
color discontinuity
illumination discontinuity
surface normal discontinuity

ME5286 – Lecture 6
What Causes Intensity Changes?
Depth discontinuity: object boundary
Change in surface orientation: shape
Cast shadows
Reflectance change: appearance information, texture

ME5286 – Lecture 6
Good Examples: Edge Detection
• Minimal Noise in the Image
#29

ME5286 – Lecture 6
Example: Edge Detection
• Different scales of edges ( Hair , Face, … )#30

ME5286 – Lecture 6
• Challenge to extract meaningful edges not corrupted by Noise
Edge DetectionExample: Edge Detection

ME5286 – Lecture 6
Modeling Intensity Changes
• Step edge: the image intensity abruptly changes from one value on one side of the discontinuity to a different value on the opposite side.

ME5286 – Lecture 6
Modeling Intensity Changes (cont’d)
• Ridge edge: the image intensity abruptly changes value but then returns to the starting value within some short distance (i.e., usually generated by lines).

ME5286 – Lecture 6
Modeling Intensity Changes (cont’d)
• Roof edge: a ridge edge where the intensity change is not instantaneous but occur over a finite distance (i.e., usually generated by the intersection of two surfaces).

ME5286 – Lecture 6
Modeling Intensity Changes (cont’d)
• Ramp edge: a step edge where the intensity change is not instantaneous but occur over a finite distance.

ME5286 – Lecture 6
Summary: Edge Definition• Edge is a boundary between two regions with relatively distinct gray level
properties. • Edges are pixels where the brightness function changes abruptly. • Edge detectors are a collection of very important local image pre-
processing methods used to locate (sharp) changes in the intensity function.
#36

ME5286 – Lecture 6
Edge Descriptors• Edge descriptors
– Edge normal: unit vector in the direction of maximum intensity change.
– Edge direction: unit vector to perpendicular to the edge normal.
– Edge position or center: the image position at which the edge is located.
– Edge strength: related to the local image contrast along the normal.
#37

ME5286 – Lecture 6
What are the steps for Edge Detection
• Main Steps in Edge Detection(1) Smoothing: suppress as much noise as possible, without destroying true edges.( we talked about this step before )
(2) Enhancement: apply differentiation to enhance the quality of edges (i.e., sharpening).

ME5286 – Lecture 6
Main Steps in Edge Detection (cont’d)
(3) Thresholding: determine which edge pixels should be discarded as noise and which should be retained (i.e., threshold edge magnitude).
(4) Localization: determine the exact edge location.
sub-pixel resolution might be required for some applications to estimate the location of an edge to better than the spacing between pixels.

ME5286 – Lecture 6
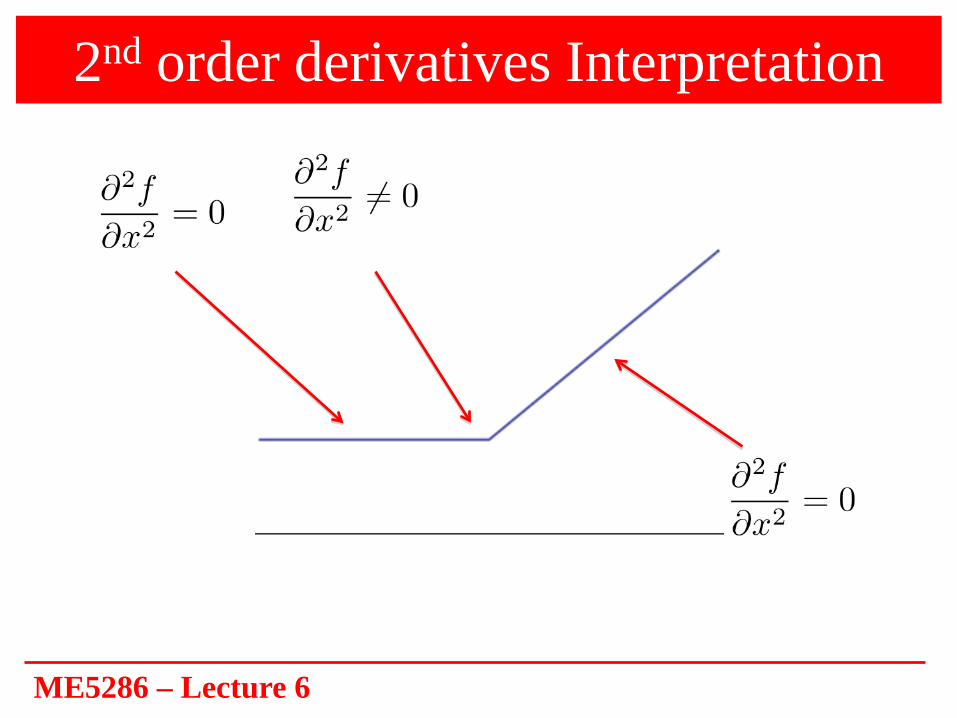
Edge Detection using Derivatives• Edge detection using derivatives
– Calculus describes changes of continuous functions using derivatives.
– An image is a 2D function, so operators describing edges are expressed using partial derivatives.
– Points which lie on an edge can be detected by either:• detecting local maxima or minima of the first derivative• detecting the zero-crossing of the second derivative
#40

ME5286 – Lecture 6
1st order derivatives Interpretation
ME5286 – Lecture 6
2nd order derivatives Interpretation
ME5286 – Lecture 6
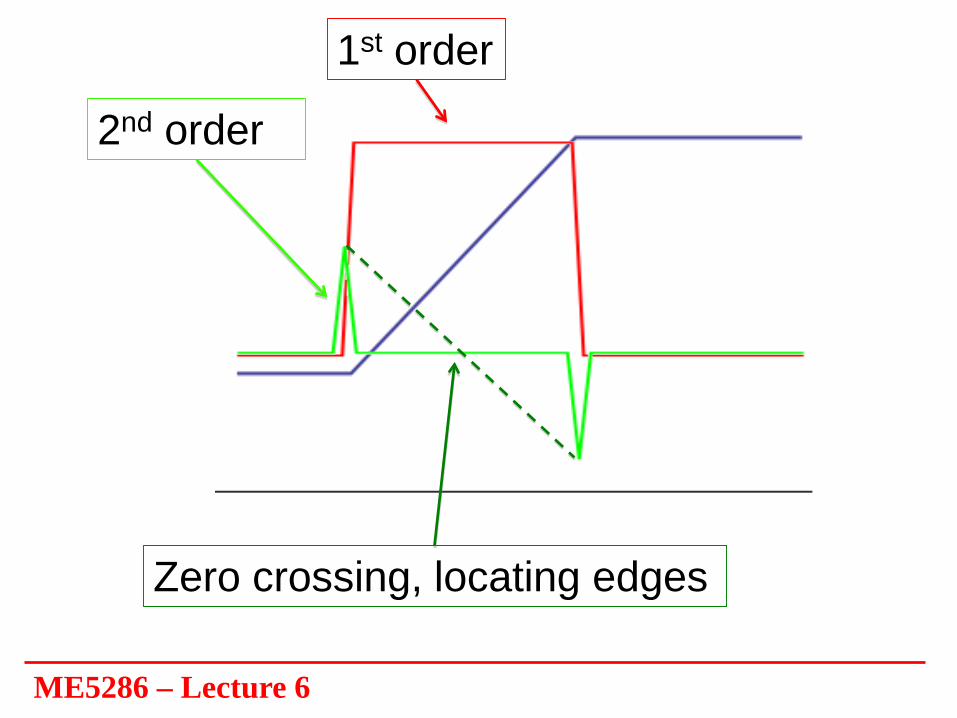
1st order
2nd order
Zero crossing, locating edges

ME5286 – Lecture 6
Comparison of Derivatives
• Looking at “nonzero-ness”– 1st order derivative gives thick edges– 2nd order derivative gives double edge
• 2nd order derivatives enhance fine detail much better.
44

ME5286 – Lecture 6
1st order
2nd order
Zero crossing, locating edges

ME5286 – Lecture 6
Edge Detection Using Derivatives
• Often, points that lie on an edge are detected by:
(1) Detecting the local maxima or minima of the first derivative.
(2) Detecting the zero-crossingsof the second derivative. 2nd derivative
1st derivative

ME5286 – Lecture 6
Image Derivatives
• How can we differentiate a digital image?
– Option 1: reconstruct a continuous image, f(x,y), then compute the derivative.
– Option 2: take discrete derivative (i.e., finite differences)
Pick Option 2 for Digital Processing

ME5286 – Lecture 6
Edge Detection using DerivativesFor 2D function, f(x,y), the partial derivative is:
For discrete data, we can approximate using finite differences:
To implement above as convolution, what would be the associated filter? [-1 1] or [1 -1] ?
εε
ε
),(),(lim),(0
yxfyxfx
yxf −+=
∂∂
→
1),(),1(),( yxfyxf
xyxf −+
≈∂
∂

ME5286 – Lecture 6
Edge Detection Using First Derivative • Computing the 1st derivative – cont.
)1()1()( −−+=′ xfxfxf
)()1()( xfxfxf −+=′
)1()()( −−≈′ xfxfxf Backward difference
Forward difference
Central difference
#49

ME5286 – Lecture 6
Edge Detection Using First Derivative
• Cartesian vs pixel-coordinates: - j corresponds to x direction
- i to -y direction

ME5286 – Lecture 6
Edge Detection Using First Derivative
sensitive to vertical edges!
sensitive to horizontal edges!

ME5286 – Lecture 6
Edge Detection Using First Derivative
ramp edge
roof edge
(upward) step edge
(downward) step edge
(centered at x)
1D functions(not centered at x)

ME5286 – Lecture 6
Edge Detection Using First Derivative • Computing the 1st derivative – cont.
– Examples using the edge models and the mask [ -1 0 1] (centered about x):
#53

ME5286 – Lecture 6
Edge Detection Using First Derivative
Which shows changes with respect to x?
-1 1
1 -1or
?-1 1
xyxf
∂∂ ),(
yyxf
∂∂ ),(

ME5286 – Lecture 6
• We can implement and using the following masks:
(x+1/2,y)
(x,y+1/2) **
good approximationat (x+1/2,y)
good approximationat (x,y+1/2)
Edge Detection Using First Derivative

ME5286 – Lecture 6
• A different approximation of the gradient:
• and can be implemented using the following masks:
*
(x+1/2,y+1/2)good approximation
Edge Detection Using First Derivative

ME5286 – Lecture 6
Approximation of First Derivative ( Gradient )
• Consider the arrangement of pixels about the pixel (i, j):
• The partial derivatives can be computed by:
• The constant c implies the emphasis given to pixels closer to the center of the mask.
3 x 3 neighborhood:

ME5286 – Lecture 6
Prewitt Operator
• Setting c = 1, we get the Prewitt operator:

ME5286 – Lecture 6
Sobel Operator
• Setting c = 2, we get the Sobel operator:

ME5286 – Lecture 6
Edge Detection Steps Using Gradient
(i.e., sqrt is costly!)

ME5286 – Lecture 6
Example (using Prewitt operator)
Note: in this example, thedivisions by 2 and 3 in the computation of fx and fyare done for normalization purposes only
ME5286 – Lecture 6
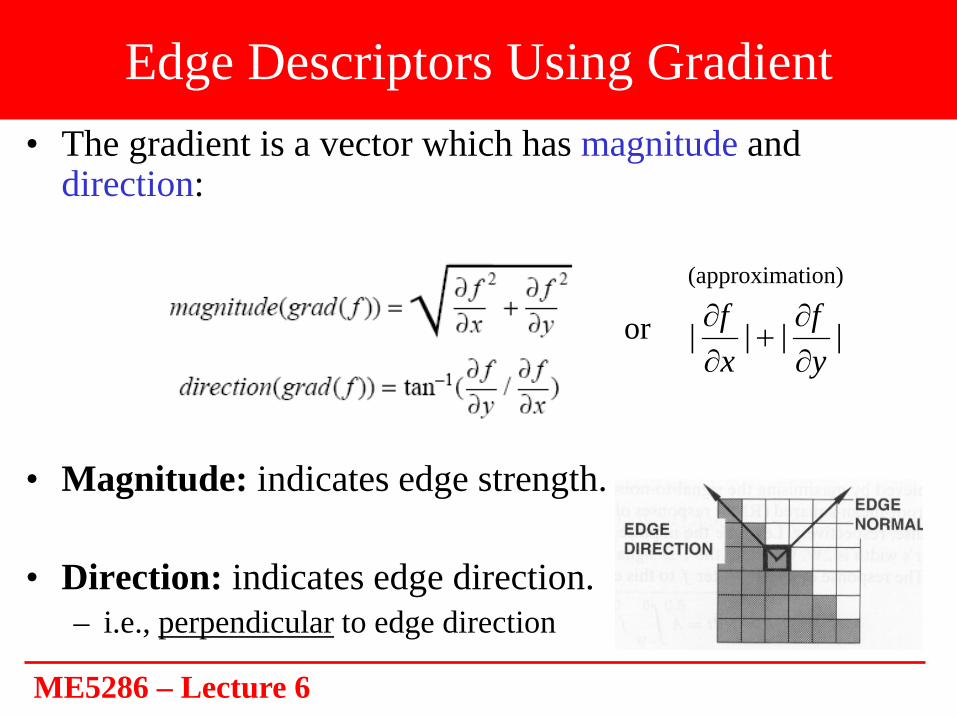
• The gradient is a vector which has magnitude and direction:
• Magnitude: indicates edge strength.
• Direction: indicates edge direction.– i.e., perpendicular to edge direction
| | | |f fx y∂ ∂
+∂ ∂
or
(approximation)
Edge Descriptors Using Gradient
ME5286 – Lecture 6
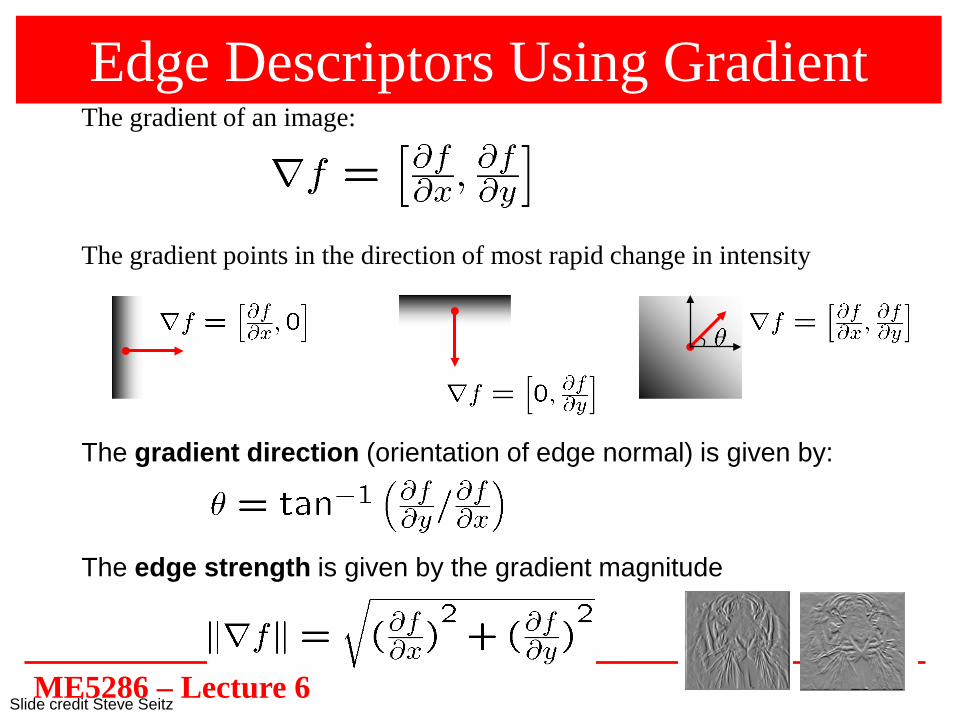
Edge Descriptors Using GradientThe gradient of an image:
The gradient points in the direction of most rapid change in intensity
The gradient direction (orientation of edge normal) is given by:
The edge strength is given by the gradient magnitude
Slide credit Steve Seitz
ME5286 – Lecture 6
Edge Detection Using SecondDerivative
• Approximate finding maxima/minima of gradient magnitude by finding places where:
• Can’t always find discrete pixels where the second derivative is zero – look for zero-crossing instead.

ME5286 – Lecture 6
Edge Detection Using Second Derivative• Computing the 2nd derivative:
– This approximation is centered about x + 1– By replacing x + 1 by x we obtain:
#65

ME5286 – Lecture 6
Image Derivatives
• 1st order
• 2nd order

ME5286 – Lecture 6
Edge Detection Using Second Derivative (cont’d)

ME5286 – Lecture 6
Edge Detection Using Second Derivative (cont’d)
• Computing the 2nd derivative – cont.– Examples using the edge models:
#68

ME5286 – Lecture 6
Edge Detection Using Second Derivative (cont’d)
(upward) step edge
(downward) step edge
ramp edge
roof edge

ME5286 – Lecture 6
Edge Detection Using Second Derivative (cont’d)
• Four cases of zero-crossings:
{+,-}, {+,0,-},{-,+}, {-,0,+}
• Slope of zero-crossing {a, -b} is: |a+b|.
• To detect “strong” zero-crossing, threshold the slope.

ME5286 – Lecture 6
Noise Effect on Derivates
Where is the edge??

ME5286 – Lecture 6
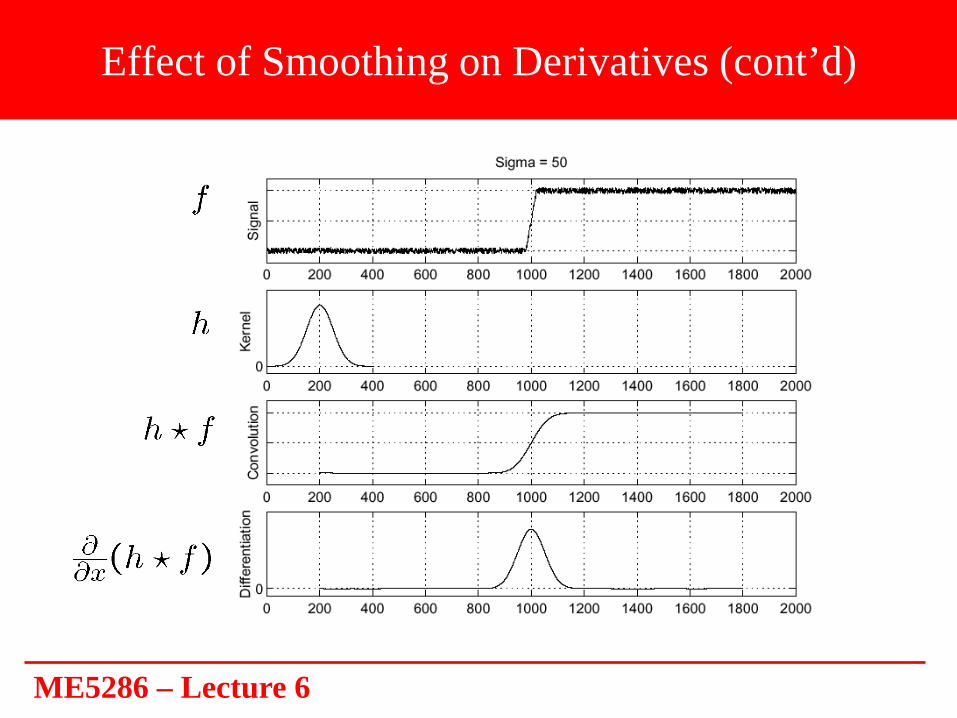
Solution: smooth first
Where is the edge? Look for peaks in
ME5286 – Lecture 6
Effect of Smoothing on Derivatives (cont’d)

ME5286 – Lecture 6
Combine Smoothing with Differentiation
(i.e., saves one operation)

ME5286 – Lecture 6
Laplacian of GaussianConsider
Laplacian of Gaussianoperator
Where is the edge? Zero-crossings of bottom graphSlide credit: Steve Seitz

ME5286 – Lecture 6
2D edge detection filters
• is the Laplacian operator:
Laplacian of Gaussian
Gaussian derivative of Gaussian
Slide credit: Steve Seitz

ME5286 – Lecture 6
[ ]11 −⊗[ ]0.0030 0.0133 0.0219 0.0133 0.00300.0133 0.0596 0.0983 0.0596 0.01330.0219 0.0983 0.1621 0.0983 0.02190.0133 0.0596 0.0983 0.0596 0.01330.0030 0.0133 0.0219 0.0133 0.0030
)()( hgIhgI ⊗⊗=⊗⊗
Derivative of Gaussian filters

ME5286 – Lecture 6
Derivative of Gaussian filters
x-direction y-direction
Source: L. Lazebnik

ME5286 – Lecture 6
Smoothing with a GaussianRecall: parameter σ is the “scale” / “width” / “spread” of the Gaussian kernel, and controls the amount of smoothing.
…
ME5286 – Lecture 6
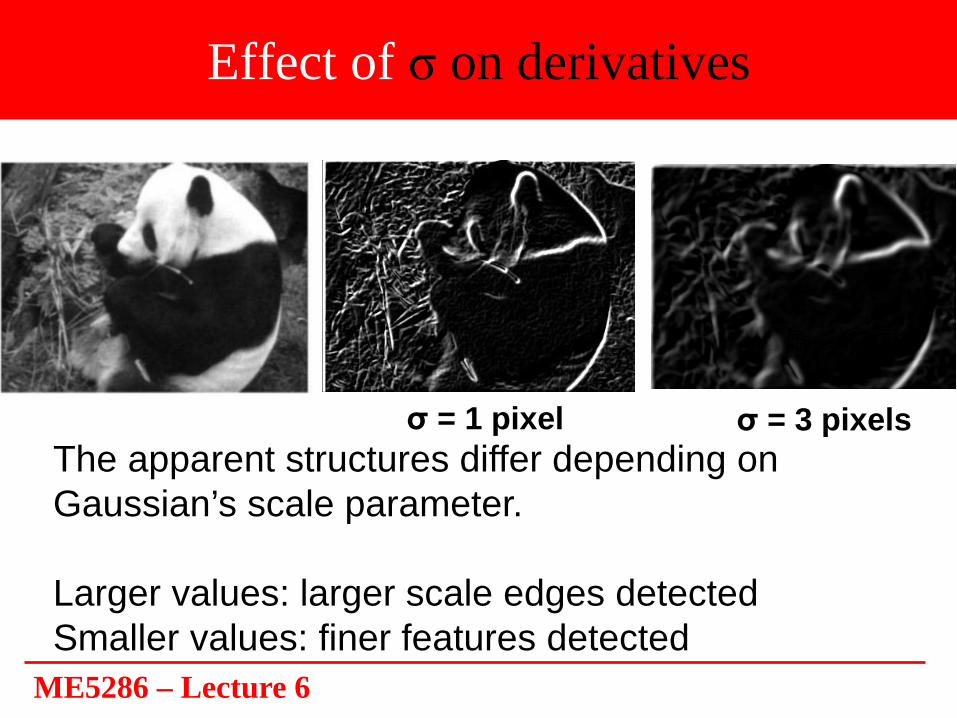
Effect of σ on derivatives
The apparent structures differ depending on Gaussian’s scale parameter.
Larger values: larger scale edges detectedSmaller values: finer features detected
σ = 1 pixel σ = 3 pixels
ME5286 – Lecture 6
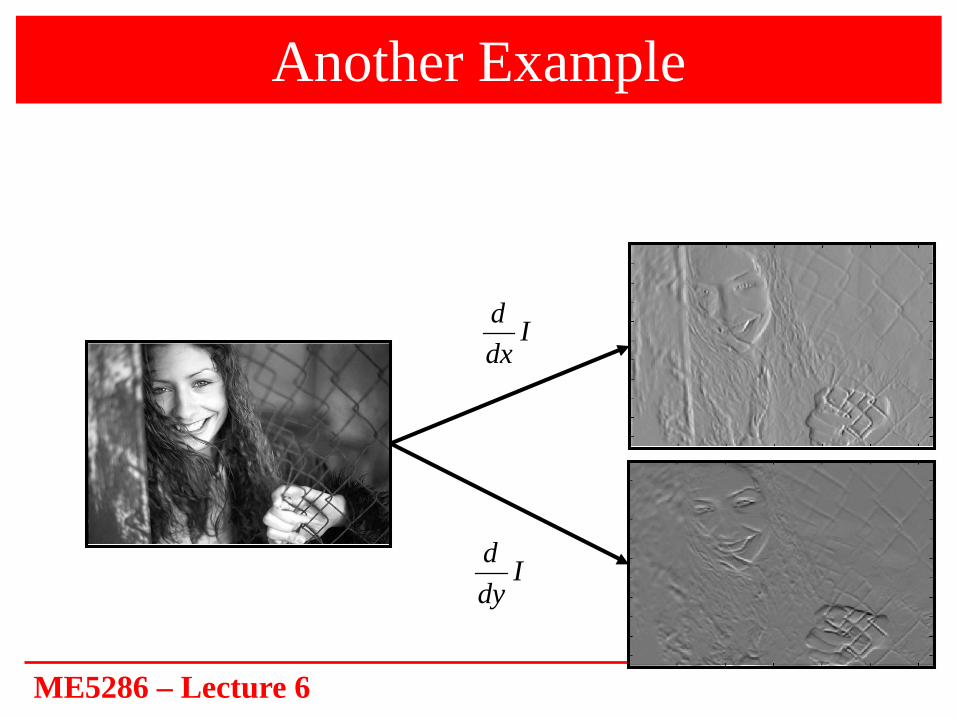
Another Example
Idxd
Idyd

ME5286 – Lecture 6
Another Example (cont’d)
22d dI Idx dy
∇ = +
100Threshold∇ ≥ =

ME5286 – Lecture 6
Isotropic property of gradient magnitude
• The magnitude of the gradient detects edges in all directions.
22d dI Idx dy
∇ = +
Idxd I
dyd

ME5286 – Lecture 6
Second Derivative in 2D: Laplacian

ME5286 – Lecture 6
Second Derivative in 2D: Laplacian

ME5286 – Lecture 6
Variations of Laplacian

ME5286 – Lecture 6
Laplacian - Example
detect zero-crossings

ME5286 – Lecture 6
Properties of Laplacian
• It is an isotropic operator. • It is cheaper to implement than the gradient
(i.e., one mask only). • It does not provide information about edge
direction.• It is more sensitive to noise (i.e.,
differentiates twice).

ME5286 – Lecture 6
Laplacian of Gaussian (LoG)(Marr-Hildreth operator)
• To reduce the noise effect, the image is first smoothed. • When the filter chosen is a Gaussian, we call it the LoG
edge detector.
• It can be shown that:
σ controls smoothing
2σ2
(inverted LoG)

ME5286 – Lecture 6
Laplacian of Gaussian (LoG) -Example
filtering zero-crossings
(inverted LoG)(inverted LoG)

ME5286 – Lecture 6
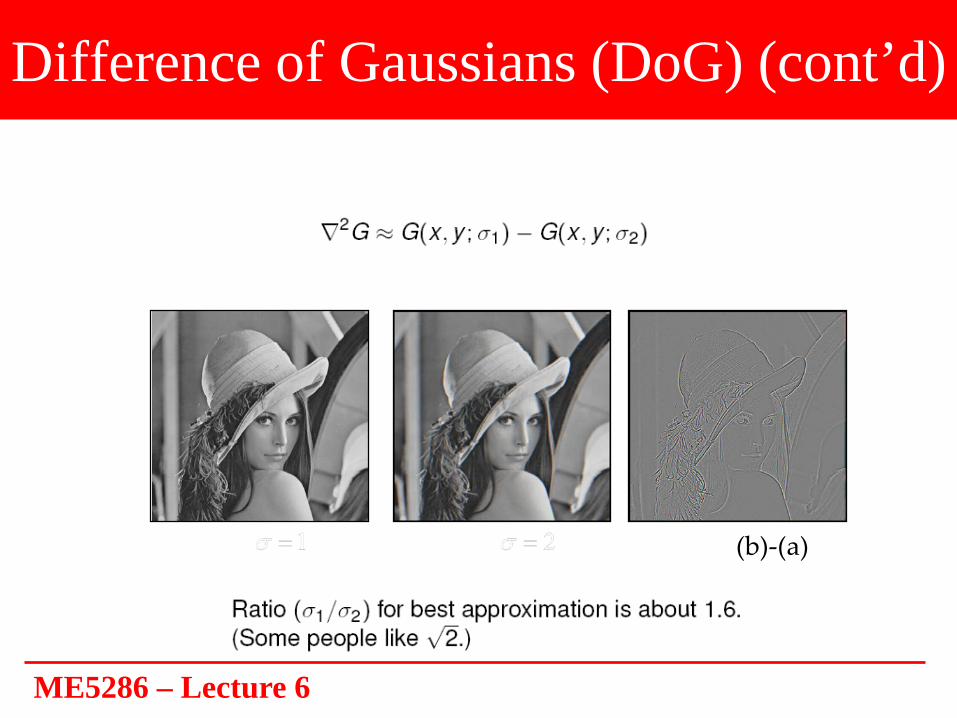
Difference of Gaussians (DoG)• The Laplacian of Gaussian can be approximated by the
difference between two Gaussian functions:
approximationactual LoG
ME5286 – Lecture 6
Difference of Gaussians (DoG) (cont’d)
(a) (b) (b)-(a)

ME5286 – Lecture 6
Gradient vs LoG• Gradient works well when the image contains sharp
intensity transitions and low noise.• Zero-crossings of LOG offer better localization, especially
when the edges are not very sharp.step edge
ramp edge

ME5286 – Lecture 6
Gradient vs LoG (cont’d)
LoG behaves poorly at corners

ME5286 – Lecture 6
Criteria for Optimal Edge Detection
• (1) Good detection– Minimize the probability of false positives (i.e., spurious edges).– Minimize the probability of false negatives (i.e., missing real
edges).
• (2) Good localization– Detected edges must be as close as possible to the true edges.
• (3) Single response– Minimize the number of local maxima around the true edge.

ME5286 – Lecture 6
Practical Issues
• Noise suppression-localization tradeoff.– Smoothing depends on mask size (e.g., depends
on σ for Gaussian filters).– Larger mask sizes reduce noise, but worsen
localization (i.e., add uncertainty to the location of the edge) and vice versa.
larger masksmaller mask

ME5286 – Lecture 6
Practical Issues (cont’d)• Choice of threshold.
gradient magnitude
low threshold high threshold

ME5286 – Lecture 6
Standard thresholding• Standard thresholding:
- Can only select “strong” edges.- Does not guarantee “continuity”.
gradient magnitude low threshold high threshold

ME5286 – Lecture 6
Hysteresis thresholding
• Hysteresis thresholding uses two thresholds:
• For “maybe” edges, decide on the edge if neighboringpixel is a strong edge.
- low threshold tl- high threshold th (usually, th = 2tl)
tltl
th
th

ME5286 – Lecture 6
Directional Derivative
• The partial derivatives of f(x,y) will give the slope ∂f/∂x in the positive x direction and the slope ∂f /∂y in the positive y direction.
• We can generalize the partial derivatives to calculate the slope in any direction (i.e., directional derivative).
f∇

ME5286 – Lecture 6
Directional Derivative (cont’d)
• Directional derivative computes intensity changes in a specified direction.
Compute derivative in direction u

ME5286 – Lecture 6
Directional Derivative (cont’d)
+ =
Directional derivative is a
linear combination of
partial derivatives.
(From vector calculus)

ME5286 – Lecture 6
Directional Derivative (cont’d)
+ =cosθ sinθ
cos , sin yx uuu u
θ θ= = cos , sinx yu uθ θ= =||u||=1

ME5286 – Lecture 6
Edge Detection Review
• Edge detection operators are based on the idea that edge information in an image is found by looking at the relationship a pixel has with its neighbors
• If a pixel's gray level value is similar to those around it, there is probably not an edge at that point
#104

ME5286 – Lecture 6
Edge Detection Review
• Edge detection operators are often implemented with convolution masks and most are based on discrete approximations to differential operators
• Differential operations measure the rate of change in a function, in this case, the image brightness function
#105

ME5286 – Lecture 6
Edge Detection Review• Preprocessing of image is required to eliminate or
at least minimize noise effects• There is tradeoff between sensitivity and accuracy
in edge detection • The parameters that we can set so that edge
detector is sensitive include the size of the edge detection mask and the value of the gray level threshold
• A larger mask or a higher gray level threshold will tend to reduce noise effects, but may result in a loss of valid edge points
#106


















