
LECTURE 2: DISCRETE EVENT SYSTEMS I
27
LECTURE 2: DISCRETE EVENT SYSTEMS I Modeling and Simulation 2 Daniel Georgiev Winter 2015
Transcript of LECTURE 2: DISCRETE EVENT SYSTEMS I
L E C T U R E 2 : D I S C R E T E E V E N T S Y S T E M S I
M o d e l i n g a n d S i m u l a t i o n 2 D a n i e l G e o r g i e v
W i n t e r 2 0 1 5

I N P U T- O U T P U T M O D E L S
INPUT OUTPUT
SYSTEM
MODELu(t) y = h(u)
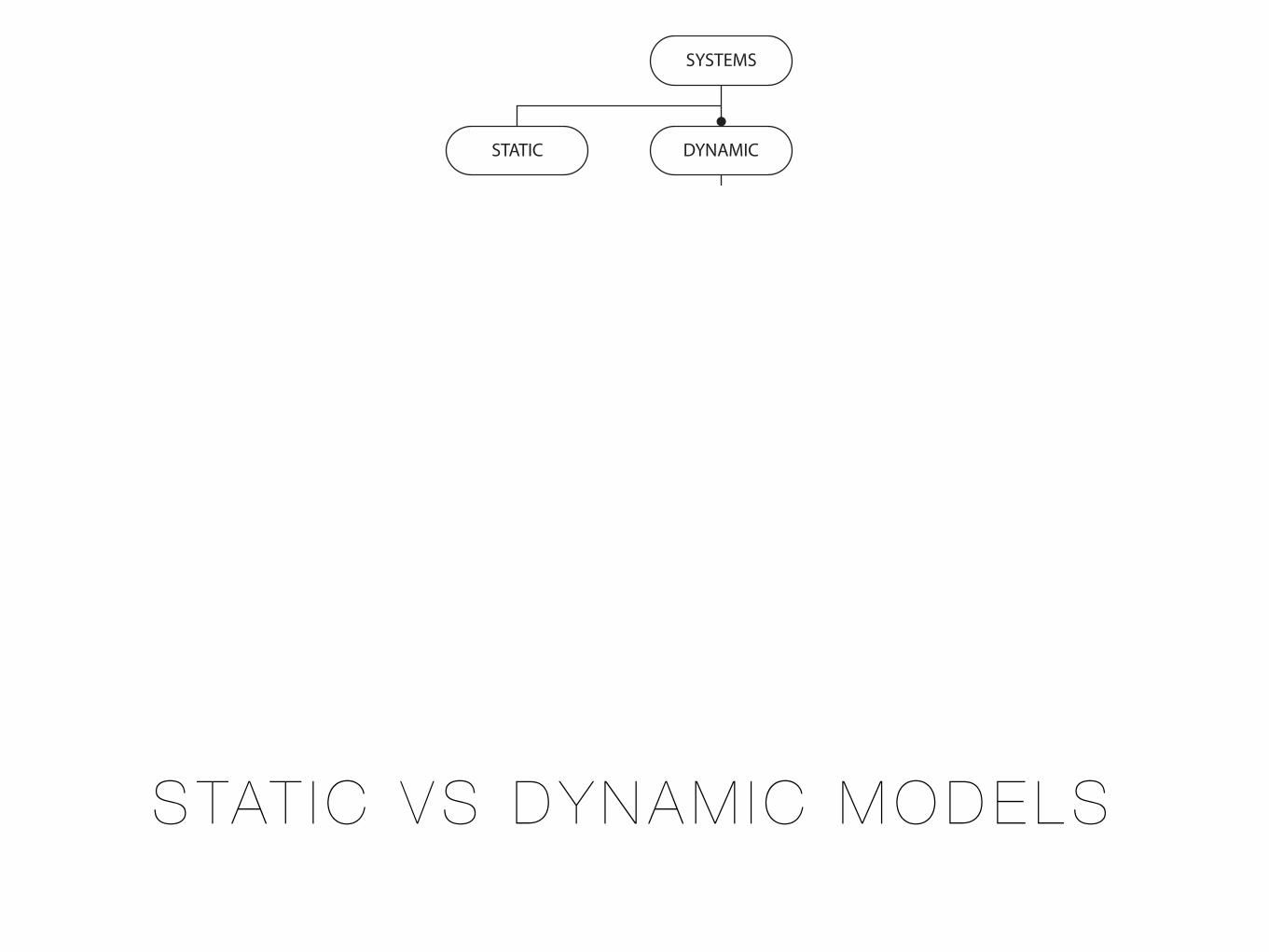
S TAT I C V S D Y N A M I C M O D E L S
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
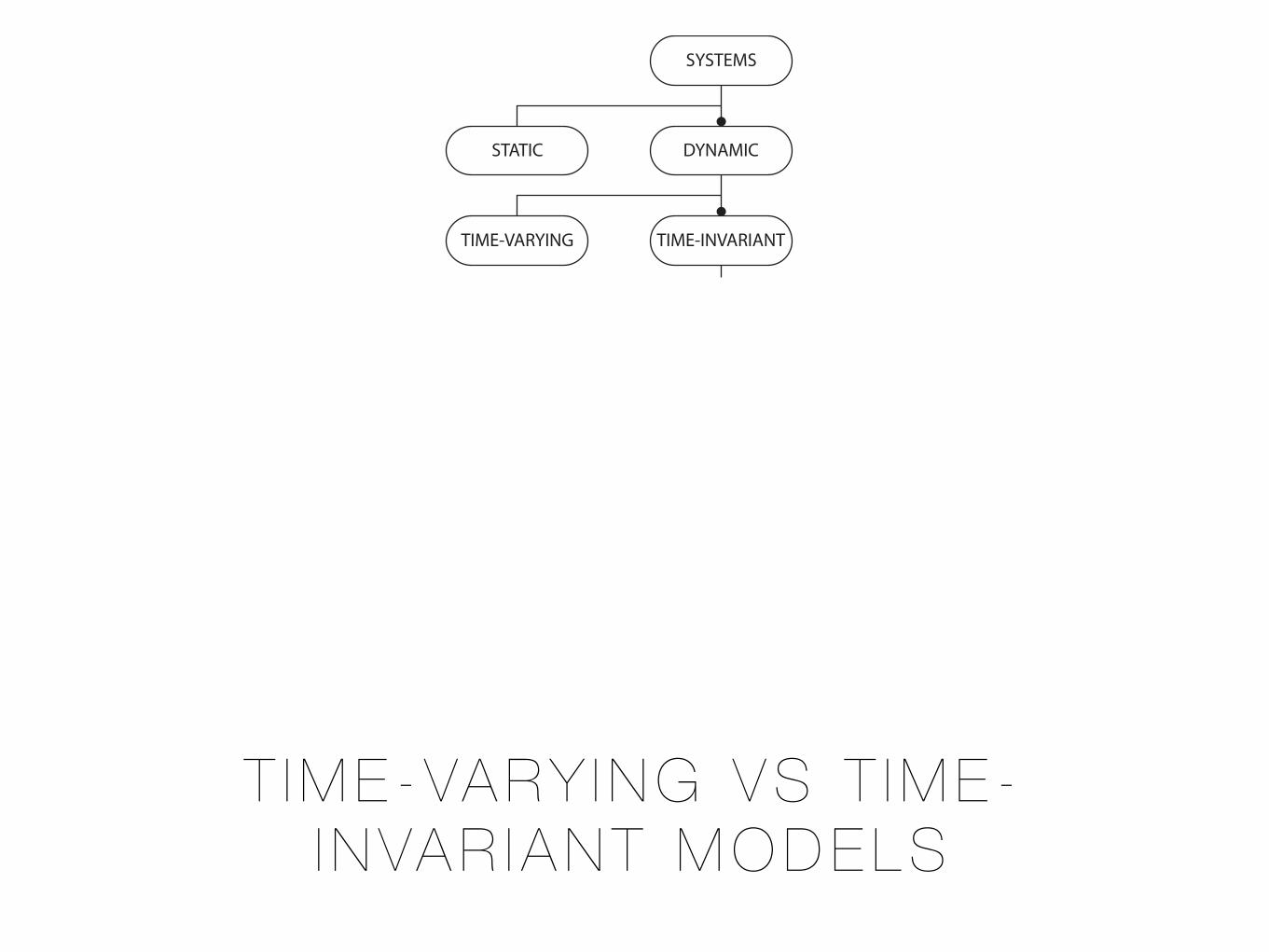
T I M E - VA R Y I N G V S T I M E -I N VA R I A N T M O D E L S
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
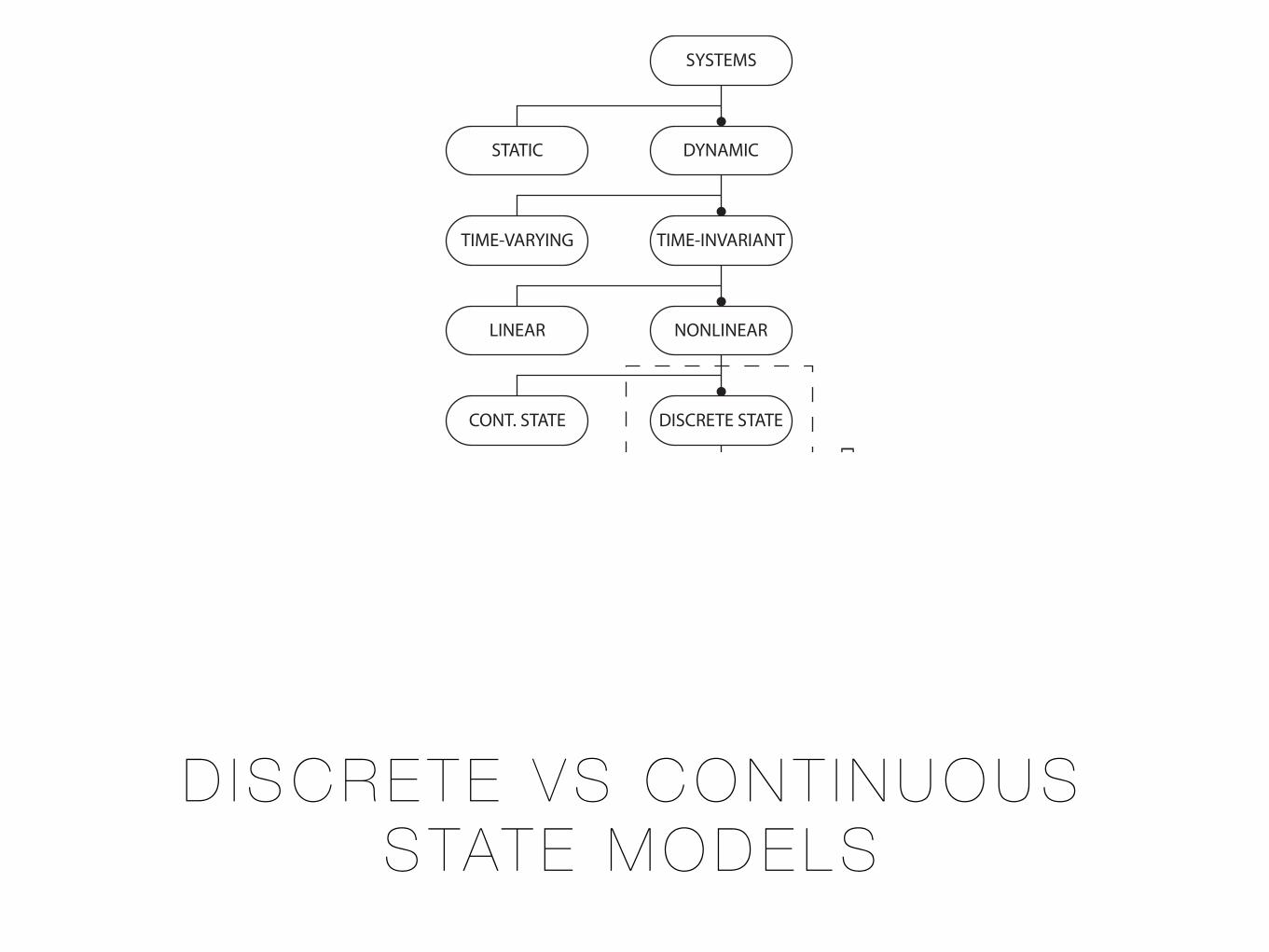
D I S C R E T E V S C O N T I N U O U S S TAT E M O D E L S
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
C O N C E P T O F A S TAT E
Definition: The state of a system at time t0 is the information required at t0 such that the output y(t), for all t≥t0, is uniquely determined from this information and from u(t), t≥t0.
C O N C E P T O F A S TAT E
Definition: The state of a system at time t0 is the information required at t0 such that the output y(t), for all t≥t0, is uniquely determined from this information and from u(t), t≥t0.
In other words … If God yesterday assembled yesterday’s state of the state of the world … we would not know the difference.

T I M E - D R I V E N V S E V E N T-D R I V E N M O D E L S
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
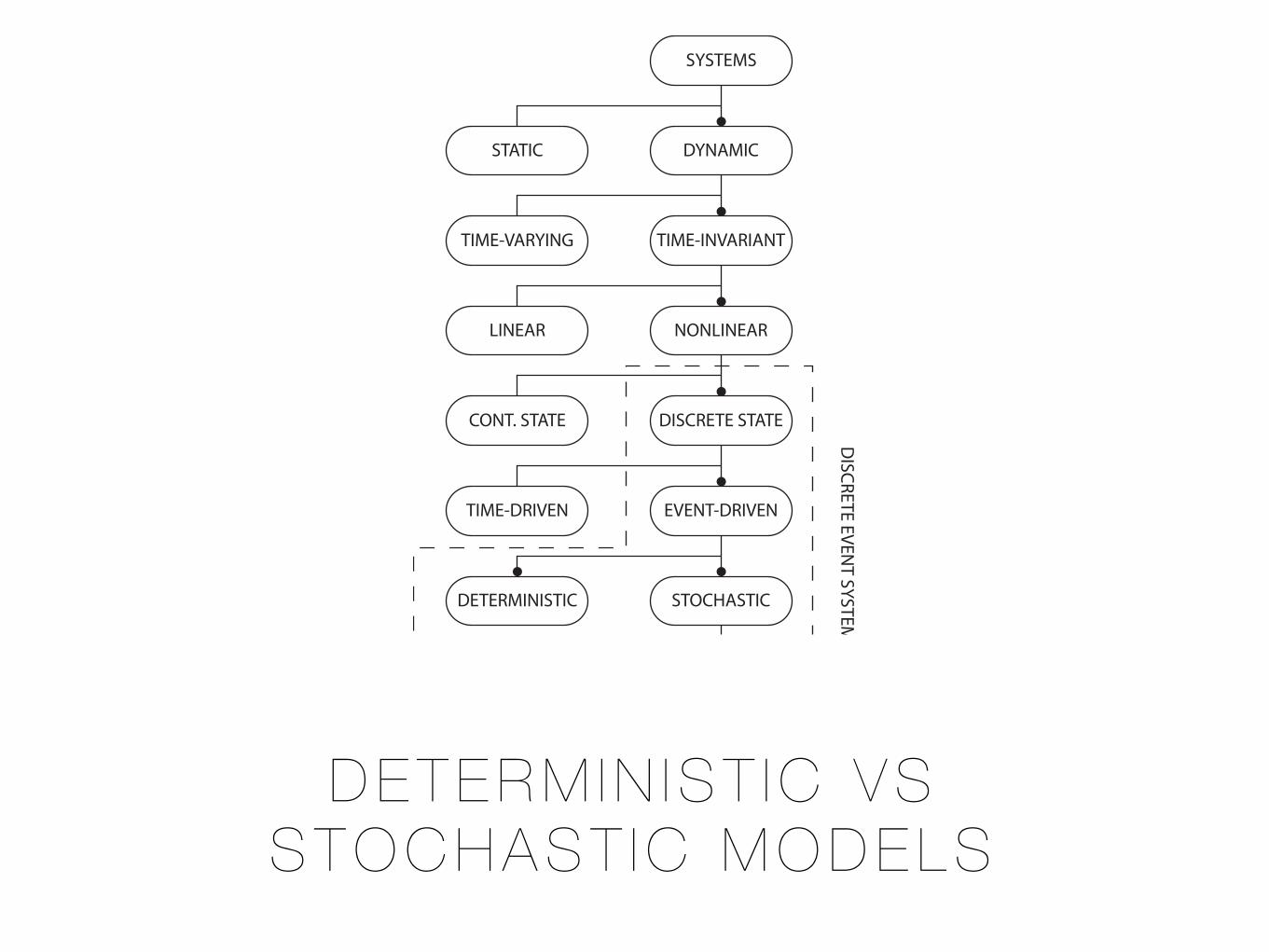
D E T E R M I N I S T I C V S S T O C H A S T I C M O D E L S
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
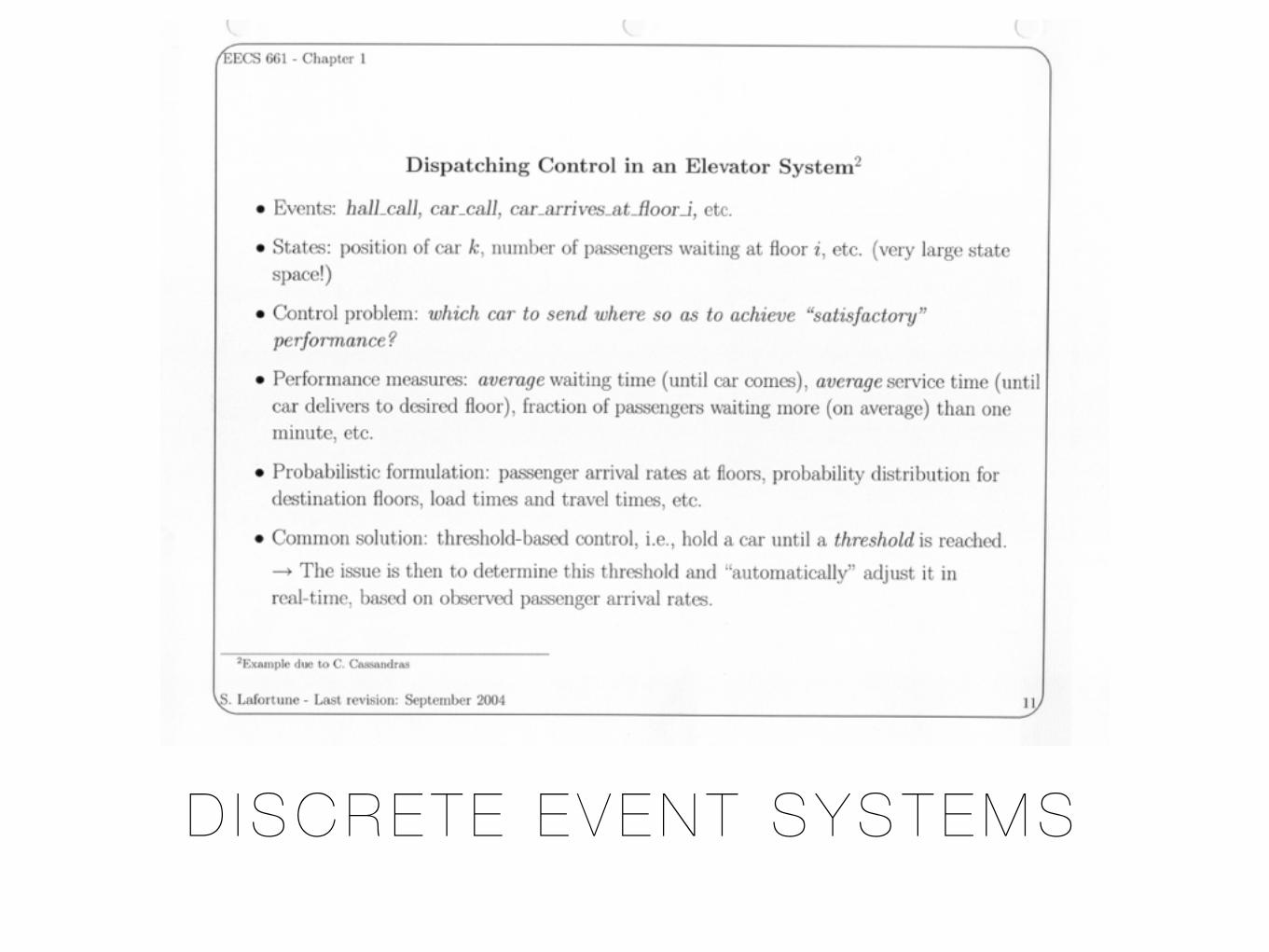
D I S C R E T E E V E N T S Y S T E M S

D I S C R E T E E V E N T S Y S T E M S

D I S C R E T E E V E N T S Y S T E M S

T H R E E L AY E R S O F A B S T R A C T I O N
SYSTEMS
STATIC DYNAMIC
TIME-VARYING TIME-INVARIANT
LINEAR NONLINEAR
CONT. STATE DISCRETE STATE
TIME-DRIVEN EVENT-DRIVEN
DETERMINISTIC STOCHASTIC
DISCRETE TIME CONT. TIME
DISCRETE EVEN
T SYSTEMS
A set of events E = {e1,e2,e3,…},
LANGUAGE: e1e2e3…
TIMED LANGUAGE: (e1,t1)(e2,t2)(e3,t3)…
STOCHASTIC TIMED LANGUAGE: P(s1):(e1,t1)(e2,t2)(e3,t3)…

W H AT I S A L A N G U A G E I N D E S T H E O R Y ?
Definition: A string is a sequence of events.
Definition: A language over an event set E = {e1,e2,e3,…} is a set of finite-length strings formed from events in E.
Language operations: concatenation, prefix closure, Kleene closure, complement
R E P R E S E N T I N G L A N G U A G E S U S I N G A U T O M ATA
Example: (server repair), E = {s,c,b,r}. In a queuing system, a server may start an operation ’s’, complete an operation ‘c’, break down ‘b’, and be repaired ‘r’.
Corresponding language: The language that describes this simple process L = {(s(cs)nbr)m,n≥0,m≥0}. This language is infinite.
Corresponding automaton: Such a language has a well defined finte description.
F O R M A L D E F I N I T I O N
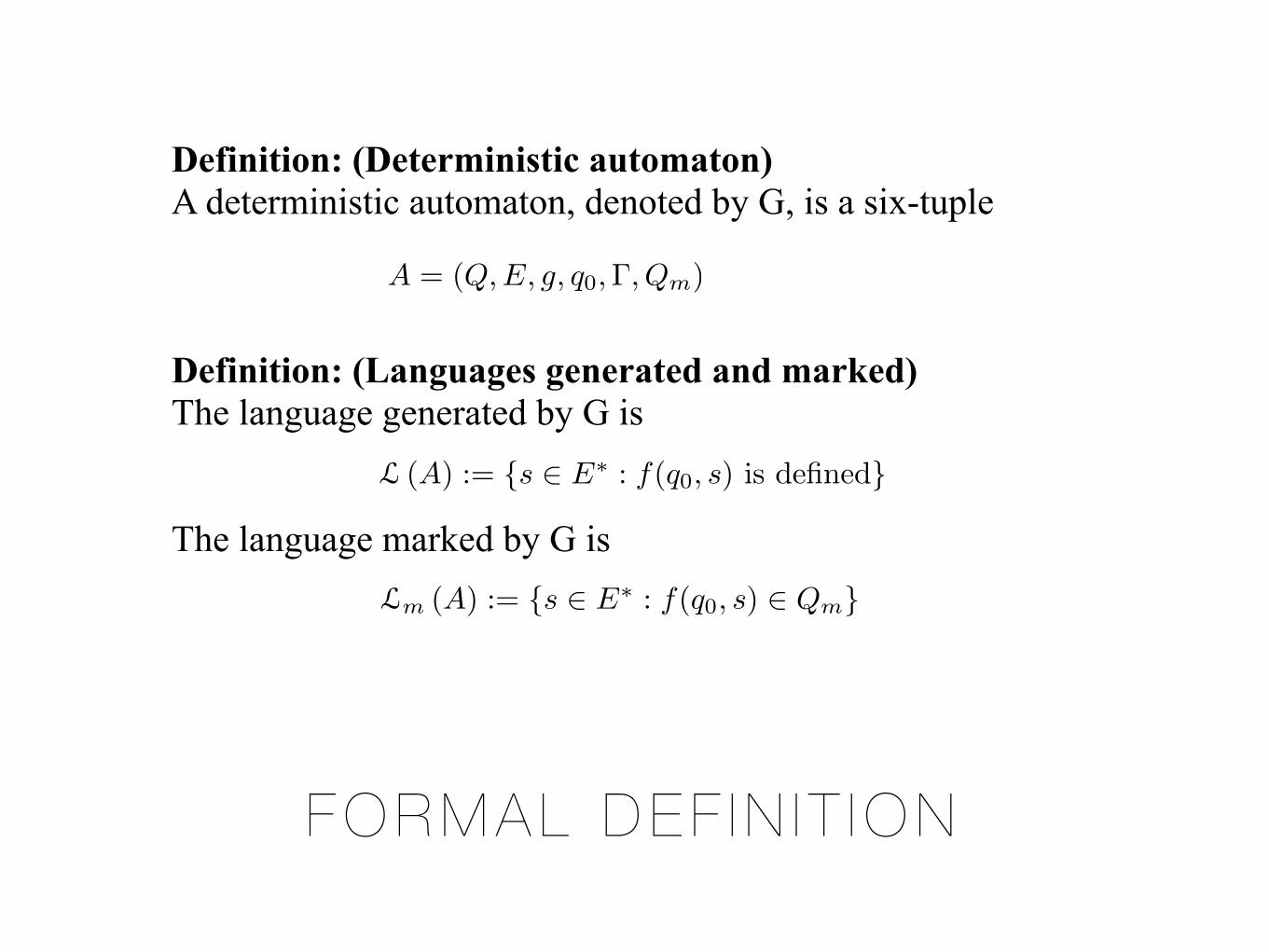
Definition: (Deterministic automaton) A deterministic automaton, denoted by G, is a six-tuple
Definition: (Languages generated and marked) The language generated by G is
The language marked by G is
L (A) := {s 2 E⇤ : f(q0, s) is defined}
Lm (A) := {s 2 E⇤ : f(q0, s) 2 Qm}
A = (Q,E, g, q0,�, Qm)
D E A D L O C K A N D L I V E L O C K
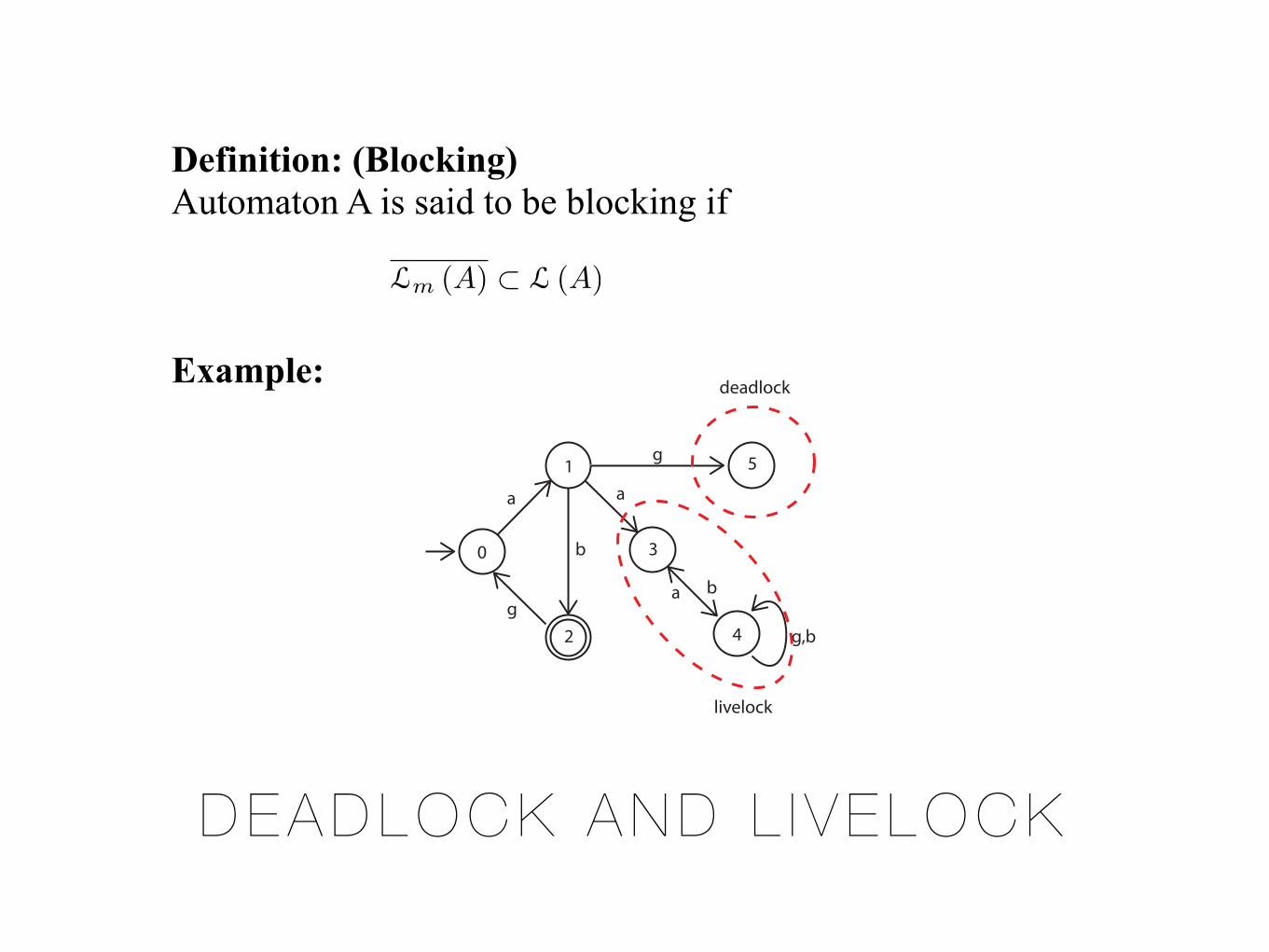
Definition: (Blocking) Automaton A is said to be blocking if
Example:
Lm (A) ⇢ L (A)
0
1
3
42
5
a
g
a
b
gb
g,b
a
deadlock
livelock
O P E R AT I O N S O N S I N G L E A U T O M ATA
Definition: (Accessible Part) A state is called accessible if it can be reached from the initial state.
Definition: (Coaccessible Part) A state q is called coaccessible if there is a string that goes through q before it goes through a state in Qm.
Computation of accessible and coaccessible parts is an important model checking tool.
Definition: (Complement) The complement automaton generates and marks the complement languages.
Exercise: Perform all these operations on the automaton in the previous slide.
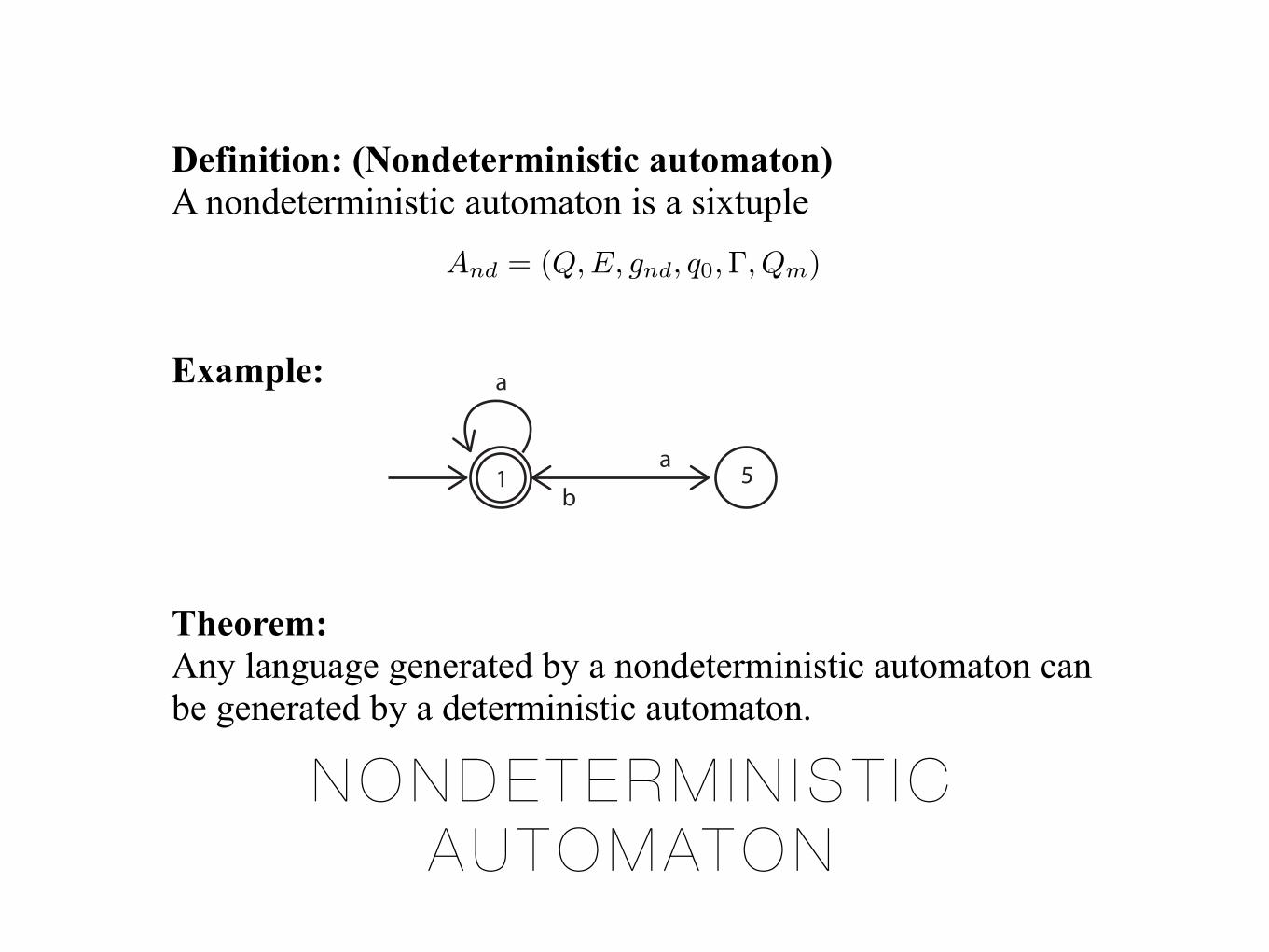
N O N D E T E R M I N I S T I C A U T O M AT O N
Definition: (Nondeterministic automaton) A nondeterministic automaton is a sixtuple
Example:
Theorem: Any language generated by a nondeterministic automaton can be generated by a deterministic automaton.
And = (Q,E, gnd, q0,�, Qm)
1 5a
a
b
F I N I T E S TAT E A U T O M AT O N
Example: (Non-regular language) The following language cannot be generated by a finite state automaton.
Definition: (Regular language) A language is said to be regular if it can be marked by a finite-state automaton.
Theorem: The following are language operations that preserve regularity: prefix closure, Kleene closure, complement, union, concatenation, intersection.
L = {✏, ab, aabb, aaabbb, ...} = {anbn : n � 0}
R E G U L A R L A N G U A G E S
Theorem: (Regular language construction) For an event set E = {e1,e2,…en}, consider the basic languages: {},1, {ei}. Then any regular language can be constructed by repeated application of concatenation, union, and Kleene closure.
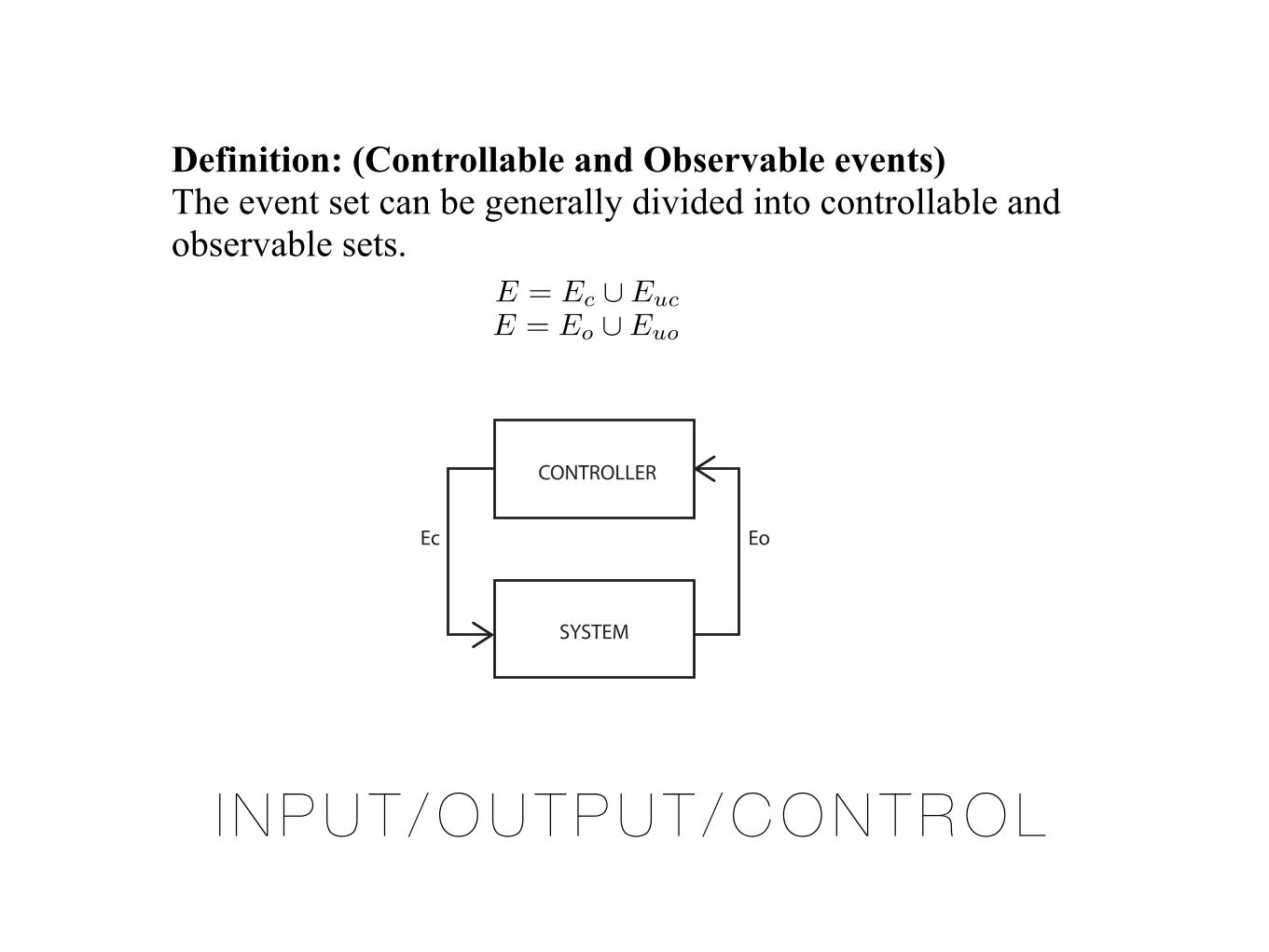
I N P U T / O U T P U T / C O N T R O L
Definition: (Controllable and Observable events) The event set can be generally divided into controllable and observable sets.
E = Ec [ Euc
E = Eo
[ Euo
SYSTEM
CONTROLLER
EoEc
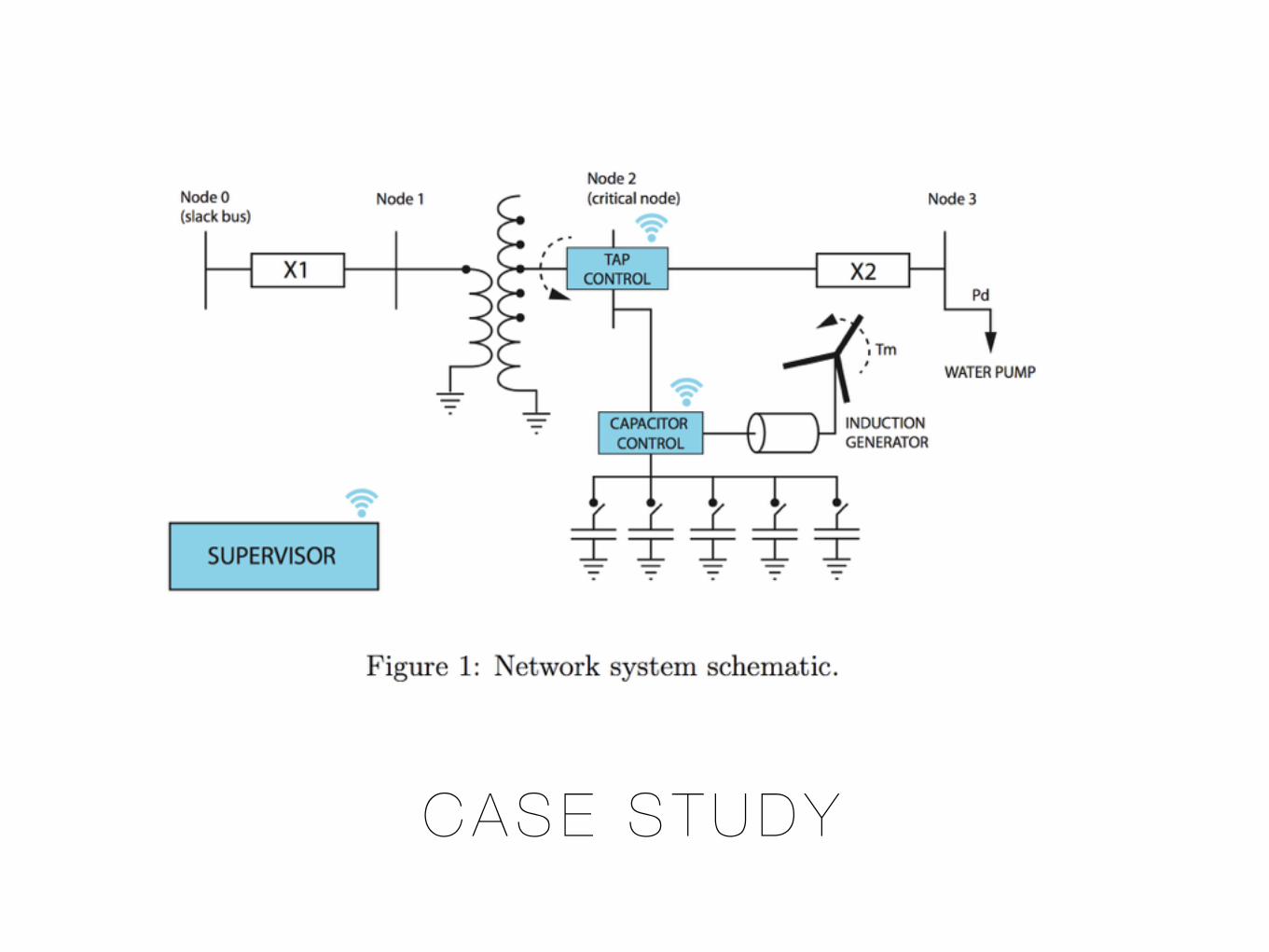
C A S E S T U D Y
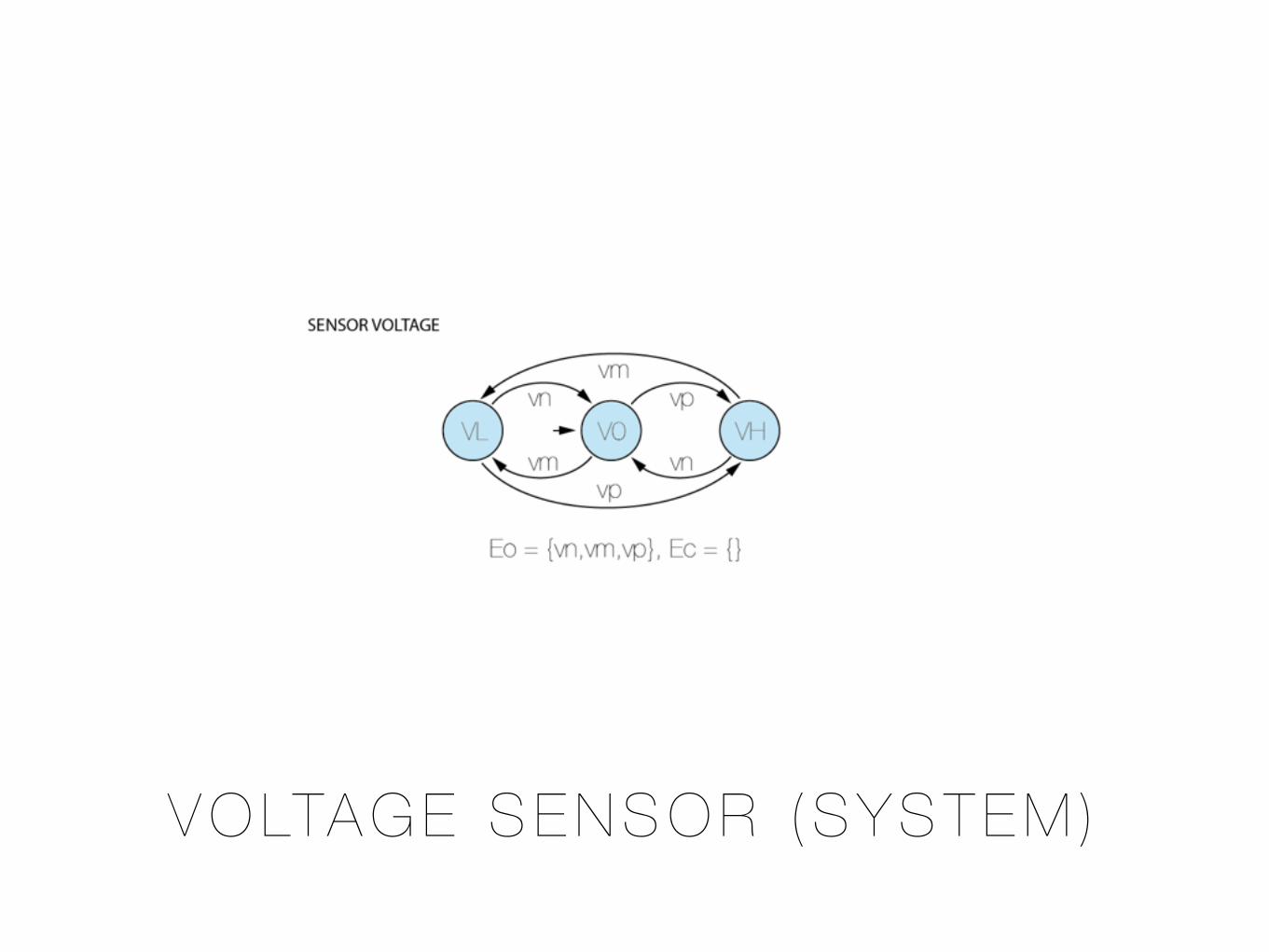
V O LTA G E S E N S O R ( S Y S T E M )
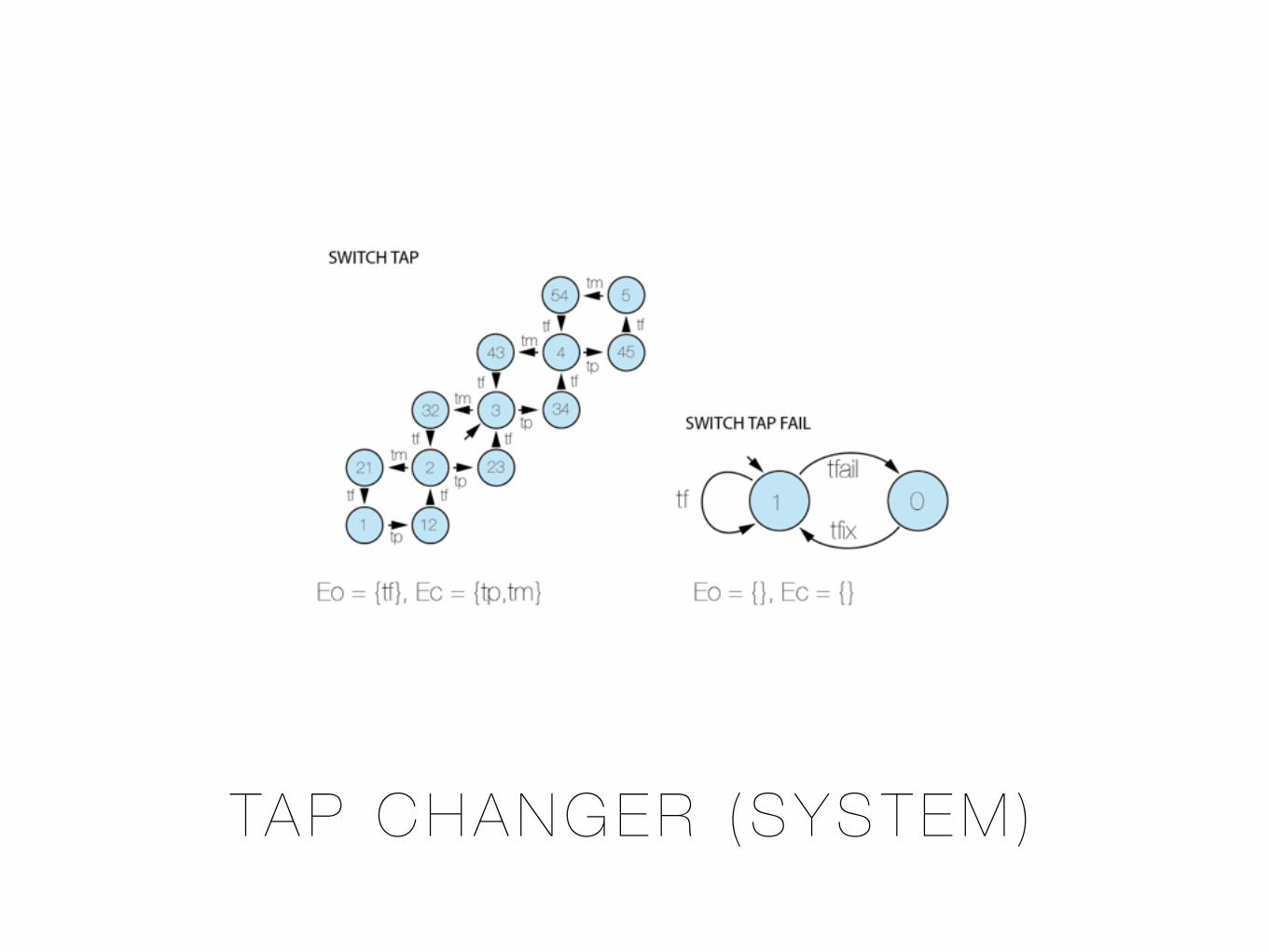
TA P C H A N G E R ( S Y S T E M )

G E N E R A L P L C S C H E M A
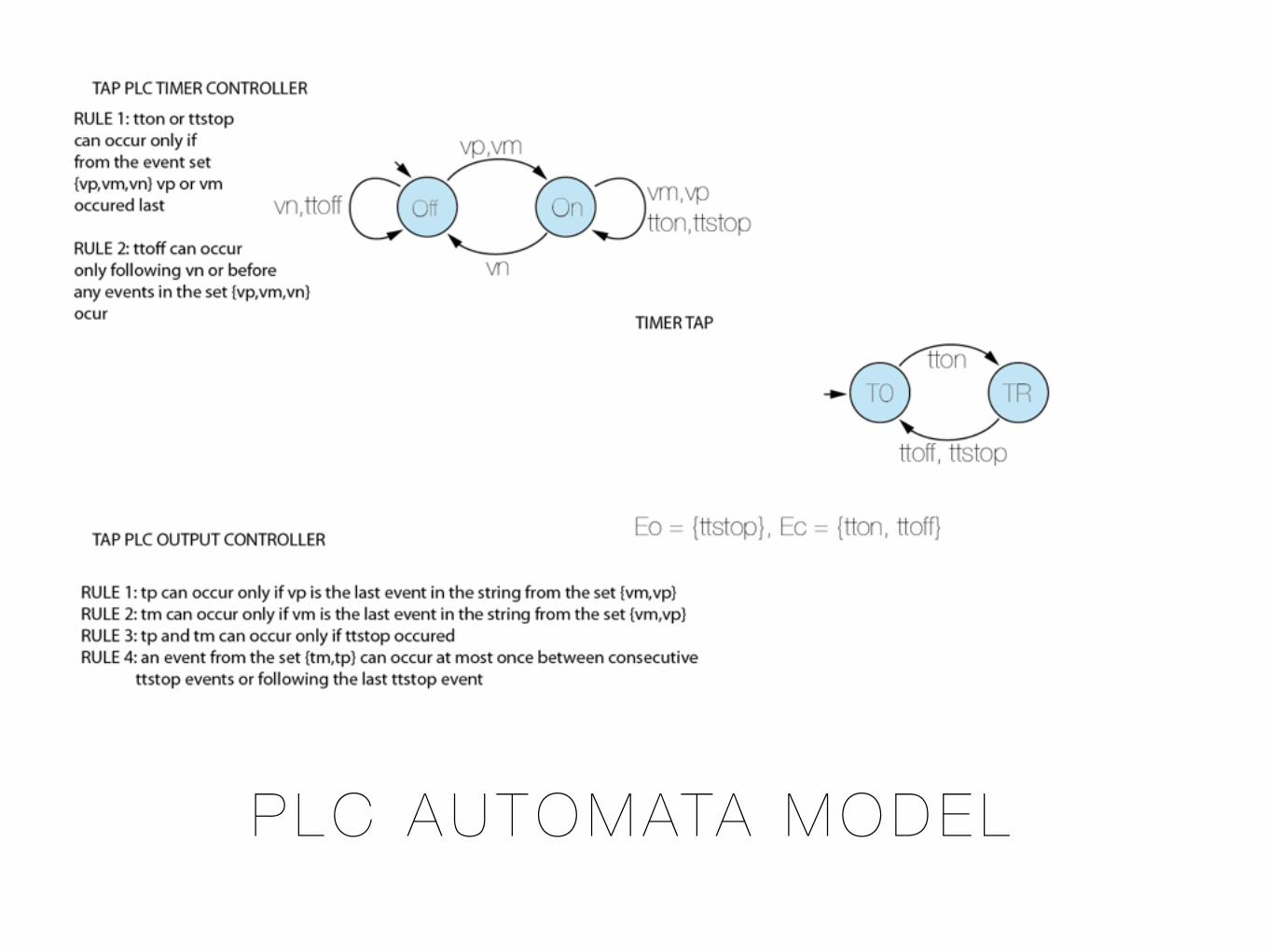
P L C A U T O M ATA M O D E L







![Discrete Control - Real-Time Systems, Lecture 14 · Discrete Control Real ... System: Chapter 12] 1. Discrete Event Systems 2. ... mechanism is time-driven. Continuous discrete-time](https://static.fdocuments.net/doc/165x107/5b1497697f8b9a3e7c8daf88/discrete-control-real-time-systems-lecture-14-discrete-control-real-system.jpg)










