
L’AUTOMAZIONE NELLE MACCHINE AGRICOLEusers.unimi.it/lzzmsm/TIE LEZ.31 Lezione Automazione...
31
1 L’ AUTOMAZIONE AUTOMAZIONE NELLE MACCHINE AGRICOLE NELLE MACCHINE AGRICOLE Aldo Calcante Aldo Calcante Dipartimento di Scienze Agrarie e Ambientali Dipartimento di Scienze Agrarie e Ambientali – Milano Milano Corso di Tecnologie Informatiche per la Meccanizzazione Agricola Corso di Tecnologie Informatiche per la Meccanizzazione Agricola TECNICHE ED ESIGENZE EMERGENTI TECNICHE ED ESIGENZE EMERGENTI Precision Precision agriculture agriculture … … Prescri pti on Prescri pti on f a r mi ng f a r mi ng … … Target Target farming farming … … Site Site - - specific specific farm management farm management … … Utilizzo di tecnologie, tecniche e metodiche di lavoro in pieno campo che consentono la coerente e non ambigua possibilità di trattare trattare in modo differenziato in modo differenziato singole aree omogenee di terreno delle quali si conoscono le reali proprietà, fabbisogni e caratteristiche produttive L o g ic a L o g ic a SI TO SI TO - - SP ECI F I CA SP ECI F I CA
Transcript of L’AUTOMAZIONE NELLE MACCHINE AGRICOLEusers.unimi.it/lzzmsm/TIE LEZ.31 Lezione Automazione...

1
LL’’AUTOMAZIONE AUTOMAZIONE NELLE MACCHINE AGRICOLENELLE MACCHINE AGRICOLE
Aldo CalcanteAldo CalcanteDipartimento di Scienze Agrarie e AmbientaliDipartimento di Scienze Agrarie e Ambientali –– MilanoMilano
Corso di Tecnologie Informatiche per la Meccanizzazione AgricolaCorso di Tecnologie Informatiche per la Meccanizzazione Agricola
TECNICHE ED ESIGENZE EMERGENTITECNICHE ED ESIGENZE EMERGENTI
PrecisionPrecision agricultureagriculture……
Prescription
Prescription farmingfarming……
Target Target farmingfarming……
SiteSite--specificspecificfarm managementfarm management……
Utilizzo di tecnologie, tecniche e metodiche di lavoro in pieno campo che consentono la coerente e non ambigua possibilità di trattare trattare in modo differenziatoin modo differenziato singole aree omogenee di terreno delle quali si conoscono le reali proprietà, fabbisogni e caratteristiche produttive LogicaLogica
SITOSITO--SPECIFICASPECIFICA

2
UNA MIGLIOR DEFINIZIONEUNA MIGLIOR DEFINIZIONE……
STRATEGIA GESTIONALE CHE UTILIZZA TECNOLOGIE INFORMATICHE PER
RACCOGLIERE DATI DA FONTI MULTIPLE IN VISTA DI UN LORO SUCCESSIVO UTILIZZO
NELL’AMBITO DI DECISIONI RIGUARDANTI LE ATTIVITA’ PRODUTTIVE DI CAMPO
STRATEGIA GESTIONALESTRATEGIA GESTIONALE CHE UTILIZZA TECNOLOGIE INFORMATICHEINFORMATICHE PER
RACCOGLIERE DATI DA FONTI MULTIPLEDATI DA FONTI MULTIPLE IN VISTA DI UN LORO SUCCESSIVO UTILIZZO
NELL’AMBITO DI DECISIONIDECISIONI RIGUARDANTI LE ATTIVITA’ PRODUTTIVE DI CAMPO
(NRC USA, 1999)(NRC USA, 1999)AP innanzitutto come AP innanzitutto come STRATEGIA DI GESTIONESTRATEGIA DI GESTIONE……
QUALITA’GESTIONALE
CAPACITA’DECISIONALE
DECISIONI BASATE SU DECISIONI BASATE SU INFORMAZIONI MIRATEINFORMAZIONI MIRATE
AP e MANAGEMENT INFORMATIZZATOAP e MANAGEMENT INFORMATIZZATO
QUALITA’GESTIONALE
CAPACITA’DECISIONALE
Necessario automatizzare i processi di monitoraggioNecessario automatizzare i processi di monitoraggio

3
I COMPONENTI DI UN I COMPONENTI DI UN SIASIA
ELABORAZIONEELABORAZIONE
UTILIZZOUTILIZZO
RACCOLTARACCOLTAANALISIANALISI
ELABORAZIONEELABORAZIONE
UTILIZZOUTILIZZO
RACCOLTARACCOLTAANALISIANALISI
ELABORAZIONEELABORAZIONE
UTILIZZOUTILIZZO
RACCOLTARACCOLTAANALISIANALISI
SistemiSistemiINFORMAZIONALIINFORMAZIONALI
SistemiSistemiOPERAZIONALIOPERAZIONALI
Sistemi di elaborazione,
comunicazione e trasferimento dati
Dispositivi e sistemi di regolazione e
controllo, automazione e raccolta dati
HARDWAREHARDWARE
Applicativi specifici e sistemi di
supporto alle decisioni
Applicativi di utilità
generale
Database Management
Systems
SOFTWARESOFTWARE
LL’’ AP COME SISTEMA INTEGRATOAP COME SISTEMA INTEGRATO
11
22
33
REGISTRAZIONE REGISTRAZIONE DATIDATI
ANALISI EANALISI EPIANIFICAZIONEPIANIFICAZIONE
CONTROLLOCONTROLLOOPERAZIONIOPERAZIONI
LAVORAZIONIDEL TERRENO
CONCIMAZIONI
POTATURECIMATURE
TRATTAMENTIDISERBI
RACCOLTA
EXTERNALSERVICE
EXTERNALEXTERNALSERVICESERVICE
GE
ST
ION
E
TE
LE
RIL
EV
AM
EN
TO
INININOUTOUTOUT

4
INQUADRAMENTO TECNOLOGIE DI BASEINQUADRAMENTO TECNOLOGIE DI BASE
TECNOLOGIE ELETTRONICHE DI BASETECNOLOGIE ELETTRONICHE DI BASE
TECNOLOGIE DI POSIZIONAMENTOTECNOLOGIE DI POSIZIONAMENTO
TECNOLOGIE INFORMATICHE HARDWARETECNOLOGIE INFORMATICHE HARDWARE
TECNOLOGIE INFORMATICHE SOFTWARETECNOLOGIE INFORMATICHE SOFTWARE
monitoraggio, regolazione e controllo operativo (sistemi sistemi di identificazione, sensori e attuatoridi identificazione, sensori e attuatori)
indispensabili quando il contenuto dell’informazionenecessita di ulteriori attributi per la sua collocazione in un sistema spaziale di riferimentosistema spaziale di riferimento
gestione fisicafisica delle informazioni
gestione semanticasemantica delle informazioni
UN POUN PO’’ DI DI STORIASTORIA……
LavorazioneLavorazionemanualemanuale
Forza Forza animale animale
MotoreMotore
PotenzaPotenzameccanicameccanica
AutomazioneAutomazione
Centrale mobileCentrale mobiledi potenzadi potenza
ElettronicaElettronica
MacchineMacchineintelligentiintelligenti

5
LL’’AUTOMAZIONEAUTOMAZIONE
Tratto distintivo che accomuna lTratto distintivo che accomuna l’’attuale evoluzione di macchine e impianti agricoli attuale evoluzione di macchine e impianti agricoli
Sistemi che sostituiscono lSistemi che sostituiscono l’’operatore nella gestione diretta di un processo operatore nella gestione diretta di un processo
Gestione dei parametri operativi in base a impostazioni ottimaliGestione dei parametri operativi in base a impostazioni ottimali predefinitepredefinite
variazioni esternevariazionivariazioni esterneesterne
impostazioni dell’operatoreimpostazioniimpostazioni delldell’’operatoreoperatore
gestione dei parametrioperativi
gestionegestione dei dei parametriparametrioperativioperativi
LL’’AUTOMAZIONE NEGLI ANNI AUTOMAZIONE NEGLI ANNI ’’50 50 -- ’’6060
Accompagna lAccompagna l’’evoluzione della meccanizzazione dagli alborievoluzione della meccanizzazione dagli albori
La storia delle discipline dellLa storia delle discipline dell’’ingegneria agraria ingegneria agraria èè ricca di eleganti esempi di sistemi ricca di eleganti esempi di sistemi meccanicimeccanici oo idrauliciidraulici con compiti di automazionecon compiti di automazione
Regolazione automatica dello sforzo di trazione (Regolazione automatica dello sforzo di trazione (FergusonFerguson, 1936), 1936)

6
LL’’AUTOMAZIONE NEGLI ANNI AUTOMAZIONE NEGLI ANNI ’’70 70 –– ’’8080
La disponibilitLa disponibilitàà di di dati in formato elettricodati in formato elettrico permette lpermette l’’introduzione di circuiti introduzione di circuiti analogici con funzioni di automazione, precursori degli attuali analogici con funzioni di automazione, precursori degli attuali sistemi di controllosistemi di controllo
dispositivocontrollatodispositivocontrollato
sensorisensori
controllorecontrollorecontrollore
attuatoriattuatori
comandi operatorecomandi operatore
impostazioni memorizzateimpostazioni memorizzate
perturbazioni
LL’’AUTOMAZIONE NEGLI ANNI AUTOMAZIONE NEGLI ANNI ’’80 80 –– ’’9090
Introduzione e rapida diffusione degli attuali controllori a Introduzione e rapida diffusione degli attuali controllori a tecnologia digitaletecnologia digitale
LL’’innovazione radicale consiste nellinnovazione radicale consiste nell’’impiego di microprocessori programmabili impiego di microprocessori programmabili
•• le funzioni operative sono definite dagli algoritmi contenuti nle funzioni operative sono definite dagli algoritmi contenuti nel softwareel software
•• le architetture hardware assumono nel tempo strutture standardile architetture hardware assumono nel tempo strutture standardizzate zzate
7
GLI AMBITI DELLGLI AMBITI DELL’’AUTOMAZIONE IN AGRICOLTURAAUTOMAZIONE IN AGRICOLTURA
Ottimizzazionefunzionale
Sistemiinformativiaziendali
Tracciabilità QualitàAspetti
ambientali
L’automazione riguarda:
INFINE..INFINE...IL.IL SOLITO DIAGRAMMA!SOLITO DIAGRAMMA!
AUTOMAZIONEAUTOMAZIONE

8
I VARI LIVELLI DELLI VARI LIVELLI DELL’’AUTOMAZIONEAUTOMAZIONE
11 –– LL’’elettronica per la gestione operativa del trattore elettronica per la gestione operativa del trattore
22 -- La guida assistita del trattoreLa guida assistita del trattore
33 -- La guida semi automatica del trattore e delle La guida semi automatica del trattore e delle semoventi semoventi
44 -- Il controllo della macchina operatrice Il controllo della macchina operatrice
55 -- La roboticaLa robotica
TEMI DESCRITTITEMI DESCRITTI
L’ELETTRONICA PER LA GESTIONE OPERATIVA DEL TRATTORE
LL’’ELETTRONICA PER LA GESTIONE ELETTRONICA PER LA GESTIONE OPERATIVA DEL TRATTOREOPERATIVA DEL TRATTORE

9
Tema 1 Tema 1 -- I SISTEMI AUTOMATICI SUI TRATTORI (1)I SISTEMI AUTOMATICI SUI TRATTORI (1)
LL’’attuale architettura dei sistemi automatici attuale architettura dei sistemi automatici èè di tipo distribuitodi tipo distribuito
Ogni singolo controllore, detto Ogni singolo controllore, detto ECUECU ((ElectronicElectronic Control Control UnitUnit), ), gestisce uno gestisce uno specifico sottosistema della macchina o impianto specifico sottosistema della macchina o impianto
Gestione di più apparati coordinati e integrati per un’ottimizzazione complessiva di funzionamentoGestione di piGestione di piùù apparati coordinati e integrati per apparati coordinati e integrati per unun’’ottimizzazione complessiva di funzionamentoottimizzazione complessiva di funzionamento
Tema 1 Tema 1 -- I SISTEMI AUTOMATICI SUI TRATTORI (2)I SISTEMI AUTOMATICI SUI TRATTORI (2)
CapacitCapacitàà di colloquio di di colloquio di ECUECU con interscambio di dati attraverso il con interscambio di dati attraverso il Bus di sistemaBus di sistema
Gestione di sistemi complessi Gestione di sistemi complessi Gestione di sistemi complessi

10
Tema 1 Tema 1 -- I SISTEMI AUTOMATICI SUI TRATTORI (3)I SISTEMI AUTOMATICI SUI TRATTORI (3)
Dalle diverse Dalle diverse ECUECU i dati confluiscono nel terminale principale i dati confluiscono nel terminale principale da dove possono essere esportatida dove possono essere esportati
200720062005
L’automazione si interfaccia con l’informaticaLL’’automazione si interfaccia con lautomazione si interfaccia con l’’informaticainformatica
Tema 1 Tema 1 -- UN POUN PO’’ DI ESEMPIDI ESEMPI
1 - Sollevatore elettronico con controllo dello slittamento
2 - Cambio Powershift elettronico
3 - Regolatore elettronico motore
4 - Cambio automatico
5 - Gestione comandi sequenziali
11 -- Sollevatore elettronico con Sollevatore elettronico con controllo dello slittamentocontrollo dello slittamento
22 -- Cambio Cambio PowershiftPowershift elettronicoelettronico
33 -- Regolatore elettronico motoreRegolatore elettronico motore
44 -- Cambio automaticoCambio automatico
55 -- Gestione comandi sequenzialiGestione comandi sequenziali

11
Tema 1 Tema 1 -- UN POUN PO’’ DI ESEMPIDI ESEMPI
Curve caratteristiche di un motore Curve caratteristiche di un motore a gestione elettronica della gestione elettronica dell’’iniezioneiniezione
Tema 1 Tema 1 -- UN POUN PO’’ DI ESEMPIDI ESEMPI
Gestione automatica delle operazioni sequenzialiGestione automatica delle operazioni sequenziali

12
Tema 1 Tema 1 -- UN POUN PO’’ DI ESEMPIDI ESEMPI
Gestione elettronica iniezioneGestione elettronica iniezione 12 12 –– 17 %17 %
Controllo dello slittamentoControllo dello slittamento 5 5 –– 10 %10 %
Gestione elettronica trasmissioneGestione elettronica trasmissione 6 6 –– 8 %8 %
Totale Totale 28 28 –– 30 %30 %
Risparmio energetico Risparmio energetico
SAME SAME IntellicabIntellicab
Tema 1 Tema 1 -- IL COMFORTIL COMFORT

13
LA GUIDA ASSISTITA DEL TRATTORELA GUIDA ASSISTITA DEL TRATTORELA GUIDA ASSISTITA DEL TRATTORE
Tema 2 Tema 2 –– LA GUIDA ASSISTITALA GUIDA ASSISTITA
y
L
Traiettoria da raggiungere
Traiettoria attuale
y
L
Traiettoria da raggiungere
Traiettoria attuale
δ = angolo sterzatura
y = scostamento laterale da traiettoria ideale
Ψ = direzione trattore
L = passo= centro istantanea rotazione
δδ = = angolo angolo sterzaturasterzatura
yy = scostamento laterale da traiettoria ideale= scostamento laterale da traiettoria ideale
ΨΨ = direzione trattore= direzione trattore
LL = passo= passo= centro istantanea rotazione= centro istantanea rotazione

14
Tema 2 Tema 2 -- QUANDO SERVE LA GUIDA ASSISTITA?QUANDO SERVE LA GUIDA ASSISTITA?
RuotinoRuotino
SchiumogenoSchiumogeno
Livello operativo
Livello direttivo
Livello strategico
Base del controllo operativoBase del controllo operativo
NONNON necessita di SInecessita di SI
APPLICAZIONI APPLICAZIONI TECNOLOGICHETECNOLOGICHE
Guida assistitaGuida assistita1
32 4
1 .1 . Ricevitore GPSRicevitore GPS
2 .2 . Correzione DGPSCorrezione DGPS
3 .3 . Sistema di elaborazione datiSistema di elaborazione dati
4 .4 . Interfaccia di comandoInterfaccia di comando

15
COME FUNZIONACOME FUNZIONA
BARRA A LEDBARRA A LEDBARRA A LED INT. GRAFICAINT.INT. GRAFICAGRAFICA
LA GUIDA SEMI-AUTOMATICA DEL TRATTORE E DELLE SEMOVENTI
LA GUIDA SEMILA GUIDA SEMI--AUTOMATICA DEL AUTOMATICA DEL TRATTORE E DELLE SEMOVENTITRATTORE E DELLE SEMOVENTI

16
Tema 3 Tema 3 -- LA GUIDA SEMILA GUIDA SEMI--AUTOMATICAAUTOMATICA
BREVETTO 1925 BREVETTO 1925 WillrodtWillrodt
…E’ UN’IDEA RECENTE?……EE’’ UNUN’’IDEA RECENTE?IDEA RECENTE?
Tema 3 Tema 3 -- LA GUIDA SEMILA GUIDA SEMI--AUTOMATICAAUTOMATICA
Pianificazione del percorso
Controllo guidaΣ
Percorso desiderato Errori Controllo
sterzo
Dinamica del trattore
Sensori postura veicolo
Postura Veicolo
Software di controllo
Pianificazione del percorso
Controllo guidaΣ
Percorso desiderato Errori Controllo
sterzo
Dinamica del trattore
Sensori postura veicolo
Postura Veicolo
Software di controllo
Diagramma di flussoDiagramma di flussoDiagramma di flusso

17
APPLICAZIONI APPLICAZIONI TECNOLOGICHETECNOLOGICHE
Guida automaticaGuida automatica11
3322
44
1 .1 . Ricevitore DGPSRicevitore DGPS
2 .2 . Sensore angolo di sterzoSensore angolo di sterzo
3 .3 . Sistema di elaborazione datiSistema di elaborazione dati
4 .4 . AttuatoreAttuatore
Tema 3 Tema 3 –– I SISTEMI DI GUIDA SEMII SISTEMI DI GUIDA SEMI--AUTOMATICA PER MACCHINEAUTOMATICA PER MACCHINESEMOVENTISEMOVENTI
Occhio allOcchio all’’operaiooperaio……
……ee alla barraalla barra

18
IL CONTROLLO DELLA MACCHINA OPERATRICE
IL CONTROLLO DELLA MACCHINA IL CONTROLLO DELLA MACCHINA OPERATRICEOPERATRICE
Tema 4 Tema 4 –– IL SISTEMA VRT (IL SISTEMA VRT (VariableVariable Rate Rate TechnologyTechnology))
VRT basata su mappeVRT basata su mappeVRT basata su mappe
VRT basata su sensoriVRT basata su sensoriVRT basata su sensori
Mappa di prescrizioneMappa di prescrizione UnitUnitàà di di acquisizione datiacquisizione dati
UnitUnitàà di controllodi controllo
Sensori ambientaliSensori ambientali
AttuatoriAttuatori
AttuatoriAttuatoriUnitUnitàà di di acquisizione datiacquisizione dati
UnitUnitàà di controllodi controllo
Sensori della Sensori della macchinamacchina
Sensori della Sensori della macchinamacchina

19
Tema 4 Tema 4 -- LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI ZOOTECNICIZOOTECNICI
LL’’automazione del dosaggio automazione del dosaggio SITOSITO--SPECIFICOSPECIFICO
ReseResemediemedieReseRese
bassebasse
ReseResealtealte
DosiDosibassabassa
mediamedia
elevataelevata
Gestione di areeSUB-appezzamentoGestione di areeGestione di aree
SUBSUB--appezzamentoappezzamento
MAPPE di prescrizioneMAPPE di prescrizioneMAPPE di prescrizione
NECESSITA’ del SINECESSITANECESSITA’’ del SIdel SI
Gestione Gestione sitosito--specifica:specifica: lavorazioni terrenolavorazioni terreno
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (1)(1)
••Sistema di lavorazione Sistema di lavorazione ••ProfonditProfonditàà di lavorazione di lavorazione
Vantaggi: riduzione dei costi (-15%) riduzione dell’erosione minor inquinamento delle acque e dell’aria aumento della fertilità
Vantaggi:Vantaggi: riduzione dei costi (riduzione dei costi (--15%) 15%) riduzione dellriduzione dell’’erosione erosione minor inquinamento delle acque e dellminor inquinamento delle acque e dell’’aria aria aumento della fertilitaumento della fertilitàà
Mappa di prescrizione
Mappa di prescrizione
Mappa di prescrizione

20
Gestione Gestione sitosito--specifica: seminaspecifica: semina
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (2)(2)
•• DensitDensitàà di semina di semina •• Tipo di seme Tipo di seme
Vantaggi: riduzione dei costi migliore adattabilità della coltura
Vantaggi:Vantaggi: riduzione dei costi riduzione dei costi migliore adattabilitmigliore adattabilitàà della coltura della coltura
Gestione Gestione sitosito--specifica: concimazionespecifica: concimazione
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (3)(3)
Mappa di prescrizione
Mappa di prescrizione
Mappa di prescrizione
Vantaggi: aumento del reddito migliora l’efficienza del concime minori perdite nell’ambiente (3-75%)
Vantaggi:Vantaggi: aumento del reddito aumento del reddito migliora lmigliora l’’efficienza del concime efficienza del concime minori perdite nellminori perdite nell’’ambiente (3ambiente (3--75%) 75%)

21
GestioneGestione sitosito--specifica: concimazionespecifica: concimazione
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (4)(4)
Ricevitore GPS Attuatore elettro-idraulico Connessione standard
Ricevitore GPS Ricevitore GPS Attuatore elettroAttuatore elettro--idraulico idraulico Connessione standardConnessione standard
Mappa di prescrizione
Mappa di prescrizione
Mappa di prescrizione
Spandiconcime a due piattiSpandiconcime a due piatti
SPANDICONCIMESPANDICONCIME A DOSAGGIO PROPORZIONALE ALLA A DOSAGGIO PROPORZIONALE ALLA VELOCITAVELOCITA’’ DI AVANZAMENTO (1) DI AVANZAMENTO (1)
OBBIETTIVO:
mantenere costante la dose
distribuita anche in presenza di
variazioni della velocità
d’avanzamento
OBBIETTIVO:OBBIETTIVO:
mantenere costante la dose mantenere costante la dose
distribuita anche in presenza di distribuita anche in presenza di
variazioni della velocitvariazioni della velocitàà
dd’’avanzamentoavanzamento

22
SPANDICONCIMESPANDICONCIME A DOSAGGIO PROPORZIONALE ALLA A DOSAGGIO PROPORZIONALE ALLA VELOCITAVELOCITA’’ DI AVANZAMENTO DI AVANZAMENTO (2)(2)
a = sensore di velocità
b = attuatori idraulici sulle paratie del disco distributore
c = sensore di apertura paratie deldisco distributore
d = computer di bordo
aa = sensore di velocit= sensore di velocitàà
bb = = attuatoriattuatori idraulici sulle paratie idraulici sulle paratie del disco distributoredel disco distributore
cc = sensore di apertura paratie del= sensore di apertura paratie deldisco distributoredisco distributore
dd = computer di bordo= computer di bordo
Schema di funzionamentoSchema di funzionamentoSchema di funzionamento
GestioneGestione sitosito--specifica: distribuzione agrofarmacispecifica: distribuzione agrofarmaci
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (5)(5)
Vantaggi: risparmio di prodotto (dal 30-80%): - 24% per erbicidi - 19% per pesticidi minor inquinamento delle acque e dell’aria sicurezza per l’operatore
Vantaggi: Vantaggi: risparmio di prodotto (dal 30risparmio di prodotto (dal 30--80%): 80%): -- 24% per erbicidi 24% per erbicidi -- 19% per pesticidi 19% per pesticidi minor inquinamento delle acque e dellminor inquinamento delle acque e dell’’aria aria sicurezza per lsicurezza per l’’operatore operatore

23
Viticoltura di precisione: defogliaturaViticoltura di precisione: defogliatura
APPLICAZIONI TECNOLOGICHE APPLICAZIONI TECNOLOGICHE (6)(6)
Consente di regolare il Consente di regolare il numero di foglie asportate in numero di foglie asportate in relazione alla rotazione del relazione alla rotazione del tamburo metallico di strappo, tamburo metallico di strappo, la rotazione può essere la rotazione può essere gestita per mezzo delle gestita per mezzo delle elettroniche ISOBUS. elettroniche ISOBUS. LL’’utilizzo di opportuni utilizzo di opportuni attuatori ci consente di attuatori ci consente di individuare zone di individuare zone di sfogliatura elevata, di sfogliatura elevata, di sfogliatura moderata e di sfogliatura moderata e di assenza totale di sfogliatura assenza totale di sfogliatura per le zone a piper le zone a piùù basso vigore basso vigore vegetativo. vegetativo.
Comunicazione su CAN busComunicazione su CAN bus
Massima sofisticazioneMassima sofisticazionedella tecnologiadella tecnologia
Dosaggio automatico sito-specificoDosaggio automatico sitoDosaggio automatico sito--specificospecifico
ESEMPIOESEMPIO 1 1 -- LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI ZOOTECNICIZOOTECNICI

24
OPERATRICEOPERATRICE TRATTORETRATTORE DGPSDGPS
previsti anchecontrolli manualiprevisti ancheprevisti anche
controlli manualicontrolli manuali
misura soloin fase di carico
misura solomisura soloin fase di caricoin fase di carico
SOFTWARE DI CONTROLLOSOFTWARE DI CONTROLLOSOFTWARE DI CONTROLLO
ESEMPIO 1 ESEMPIO 1 -- LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI ZOOTECNICIZOOTECNICI
SPANDILIQUAMESPANDILIQUAMESPANDILIQUAME
SPANDILETAMESPANDILETAMESPANDILETAME
ESEMPIO 1 ESEMPIO 1 -- LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI ZOOTECNICIZOOTECNICI

25
Visualizzazione di mappae percorsi in tempo realeVisualizzazione di mappaVisualizzazione di mappae percorsi in tempo realee percorsi in tempo reale
ESEMPIO 1 ESEMPIO 1 -- LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI LA DISTRIBUZIONE LOCALIZZATA DEI REFLUI ZOOTECNICIZOOTECNICI
Fase 3 Fase 3 –– Posa dei paliPosa dei pali
Fase 2 Fase 2 –– Trapianto Trapianto meccanizzatomeccanizzato
ESEMPIO 2 ESEMPIO 2 -- LL’’AUTOMAZIONE DELLAUTOMAZIONE DELL’’IMPIANTO DI UN VIGNETOIMPIANTO DI UN VIGNETO
Dalla messa a dimora delle barbatelle dipende la regolarità spaziale del vigneto. Essa è indispensabile per:
il corretto svolgimento delle successive operazioni meccanizzate in vigneto
agevolare la vendemmia meccanica
fini estetici e paesaggistici
Dalla messa a dimora delle barbatelle Dalla messa a dimora delle barbatelle dipende la regolaritdipende la regolaritàà spaziale del vigneto. spaziale del vigneto. Essa Essa èè indispensabile per:indispensabile per:
il corretto svolgimento delle successive il corretto svolgimento delle successive operazioni meccanizzate in vignetooperazioni meccanizzate in vigneto
agevolare la vendemmia meccanicaagevolare la vendemmia meccanica
fini estetici e paesaggisticifini estetici e paesaggistici
Fase 1 Fase 1 –– Squadratura Squadratura appezzamentoappezzamento
RisultatoRisultato
26
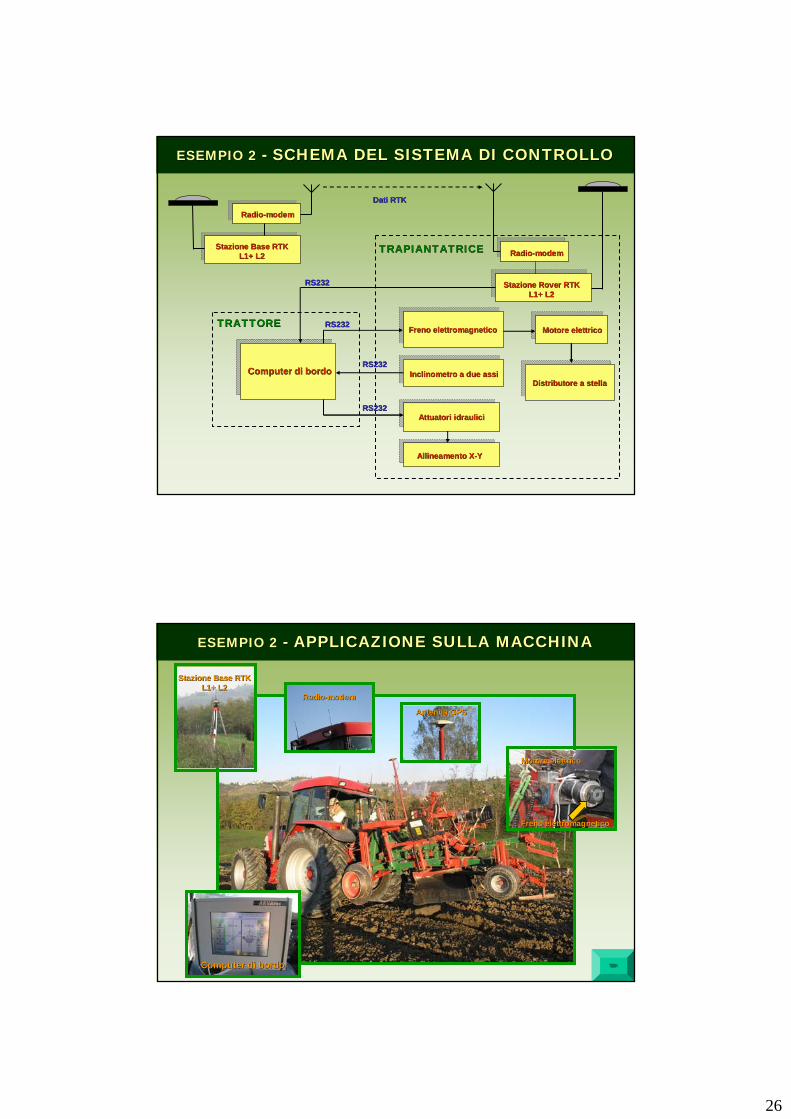
ESEMPIO 2 ESEMPIO 2 -- SCHEMA DEL SISTEMA DI CONTROLLOSCHEMA DEL SISTEMA DI CONTROLLO
Stazione Base RTKStazione Base RTKL1+ L2L1+ L2
RadioRadio--modemmodem
TRATTORETRATTORE
TRAPIANTATRICETRAPIANTATRICE
Stazione Stazione RoverRover RTKRTKL1+ L2L1+ L2
RadioRadio--modemmodem
Dati RTKDati RTK
Computer di bordoComputer di bordo Inclinometro a due assiInclinometro a due assi
Motore elettricoMotore elettricoFreno elettromagneticoFreno elettromagnetico
AttuatoriAttuatori idrauliciidraulici
Distributore a stellaDistributore a stella
Allineamento XAllineamento X--YY
RS232RS232
RS232RS232
RS232RS232
RS232RS232
ESEMPIO 2 ESEMPIO 2 -- APPLICAZIONE SULLA MACCHINAAPPLICAZIONE SULLA MACCHINA
AttuatoriAttuatori idrauliciidraulici
Stazione Base RTKStazione Base RTKL1+ L2L1+ L2
Motore elettricoMotore elettrico
Antenna GPSAntenna GPS
Computer di bordoComputer di bordo
RadioRadio--modemmodem
Freno elettromagneticoFreno elettromagnetico

27
Identificazione automatica patologie e malerbeIdentificazione automatica patologie e malerbe
Tema 4 Tema 4 –– UN ALTRO ESEMPIOUN ALTRO ESEMPIO
Distribuzione localizzata dei fitofarmaciDistribuzione localizzata dei fitofarmaci
Tema 4 Tema 4 –– UN ALTRO ESEMPIO: IL WEEDSEEKERUN ALTRO ESEMPIO: IL WEEDSEEKER
due sorgenti luminose
se la riflettanza è quella della clorofilla, si apre l’ugello
il prodotto viene spruzzato sulla pianta
due sorgenti luminosedue sorgenti luminose
se la se la riflettanzariflettanza èè quella della clorofilla, si apre lquella della clorofilla, si apre l’’ugellougello
il prodotto viene spruzzato sulla piantail prodotto viene spruzzato sulla pianta
Dove si usa?Dove si usa?
AMBITO URBANOAMBITO URBANOAMBITO URBANO AMBITO AGRICOLOAMBITO AGRICOLOAMBITO AGRICOLO

28
LA ROBOTICALA ROBOTICALA ROBOTICA
Tema 5 Tema 5 –– QUALCHE QUALCHE ESEMPIOESEMPIO……
Irroratrice a guida automatica Irroratrice a guida automatica operante a velocitoperante a velocitàà v = 25 km / hv = 25 km / h

29
Tema 5 Tema 5 –– QUALCHE QUALCHE ESEMPIOESEMPIO……
GPS + sensori inerzialiGPS + sensori inerziali

30
LL’’AUTOMAZIONE AUTOMAZIONE ““SPINTASPINTA”” RAPPRESENTA RAPPRESENTA UNUN’’OPPORTUNITAOPPORTUNITA’…’…
……OO UN PROBLEMA?UN PROBLEMA?

31
OSSERVAZIONI CONCLUSIVEOSSERVAZIONI CONCLUSIVE
Le applicazioni AP richiedono approcci complessi: Le applicazioni AP richiedono approcci complessi: attenzione a non indurre aspettative eccessive e a non creare false illusioni
Fondamentale Fondamentale procedere al trasferimento di tecnologie operando nell’ambito di un quadro metodologico di quadro metodologico di riferimentoriferimento (per quanto banale, è utile distinguere tra esigenze di monitoraggio e di automazione)
Operare con la consapevolezza Operare con la consapevolezza che le maggiori difficoltà riguardano il trasferimento delle tecnologie informatiche in agricoltura (consistenti barriere nell’applicare componenti OLAP)
Progettare trasferimenti tecnologici GRADUALIProgettare trasferimenti tecnologici GRADUALI, individuando esigenze primarie da soddisfare con soluzioni relativamente semplici (es.: guida assistita) e prevedendo minime applicazioni di monitoraggio (QCI)
Fondamentale la formazione Fondamentale la formazione delledelle FIGURE FIGURE PROFESSIONALI coinvoltePROFESSIONALI coinvolte


















