Koen HindriksProgramming Multi-Agent Systems Agent Programming in G OAL Modules Koen Hindriks Delft...
46
Koen Hindriks Programming Multi-Agent Systems Agent Programming in GOAL Modules Koen Hindriks Delft University of Technology, The Netherlands Multi-Agent Systems Course
-
Upload
antony-cain -
Category
Documents
-
view
220 -
download
1
Transcript of Koen HindriksProgramming Multi-Agent Systems Agent Programming in G OAL Modules Koen Hindriks Delft...
Koen Hindriks Programming Multi-Agent Systems
Agent Programming in GOALModules
Koen HindriksDelft University of Technology, The Netherlands
Multi-Agent Systems Course
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Agents in Games
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
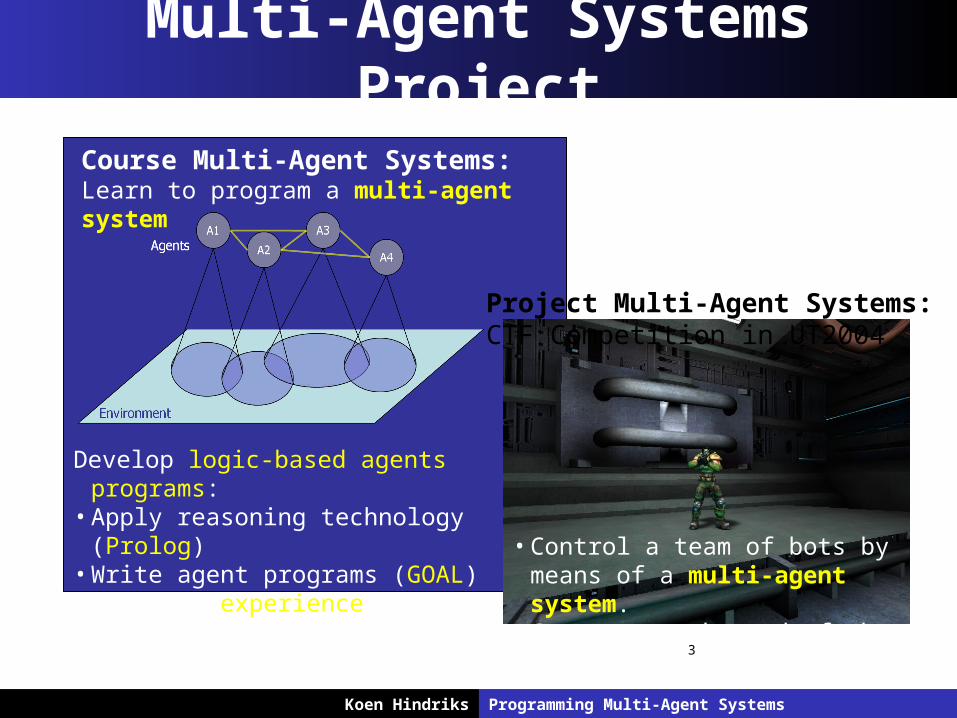
Multi-Agent Systems Project
3
Project Multi-Agent Systems:CTF Competition in UT2004
• Control a team of bots by means of a multi-agent system.
• Compete at the end of the project.
Course Multi-Agent Systems:Learn to program a multi-agent system
Develop logic-based agents programs:
• Apply reasoning technology (Prolog)
• Write agent programs (GOAL)• Hands-on experience by various
programming assignments.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Outline
• Modules
• BW4T Assignment
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
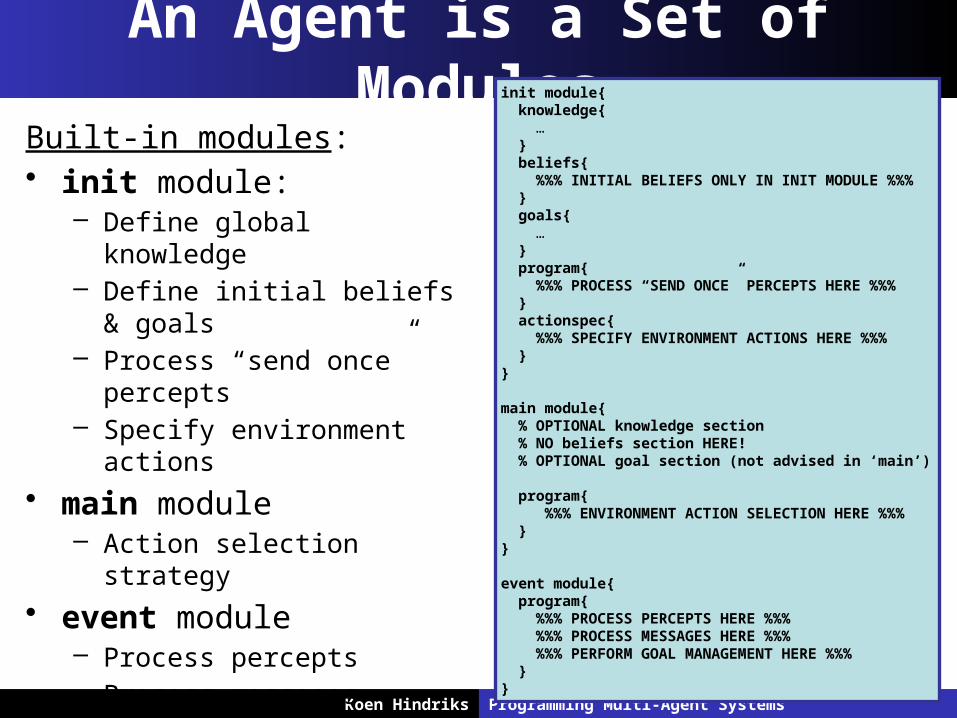
An Agent is a Set of ModulesBuilt-in modules:• init module:
– Define global knowledge– Define initial beliefs & goals– Process “send once” percepts– Specify environment actions
• main module– Action selection strategy
• event module– Process percepts– Process messages– Goal management
User-defined modules.
init module{ knowledge{ … } beliefs{ %%% INITIAL BELIEFS ONLY IN INIT MODULE %%% } goals{ … } program{ %%% PROCESS “SEND ONCE” PERCEPTS HERE %%% } actionspec{ %%% SPECIFY ENVIRONMENT ACTIONS HERE %%% }} main module{ % OPTIONAL knowledge section % NO beliefs section HERE! % OPTIONAL goal section (not advised in ‘main’) program{ %%% ENVIRONMENT ACTION SELECTION HERE %%% }}
event module{ program{ %%% PROCESS PERCEPTS HERE %%% %%% PROCESS MESSAGES HERE %%% %%% PERFORM GOAL MANAGEMENT HERE %%% }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
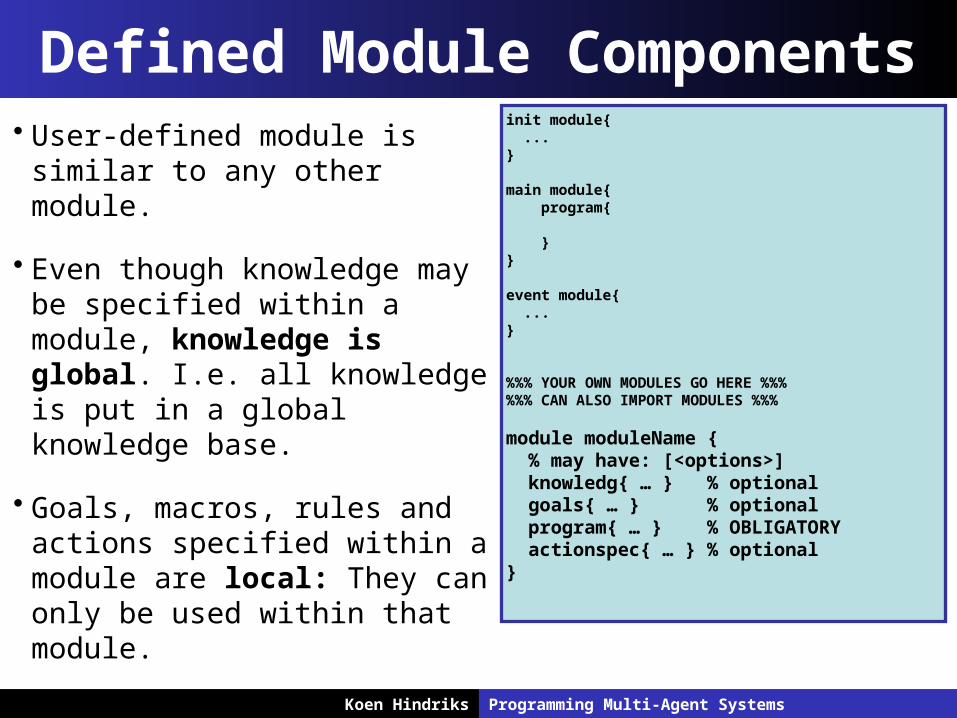
Defined Module Components• User-defined module is similar to
any other module.
• Even though knowledge may be specified within a module, knowledge is global. I.e. all knowledge is put in a global knowledge base.
• Goals, macros, rules and actions specified within a module are local: They can only be used within that module.
init module{ ...} main module{ program{
}}
event module{ ... }
%%% YOUR OWN MODULES GO HERE %%%%%% CAN ALSO IMPORT MODULES %%%
module moduleName { % may have: [<options>] knowledg{ … } % optional goals{ … } % optional program{ … } % OBLIGATORY actionspec{ … } % optional}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Tower Env: Agent Design
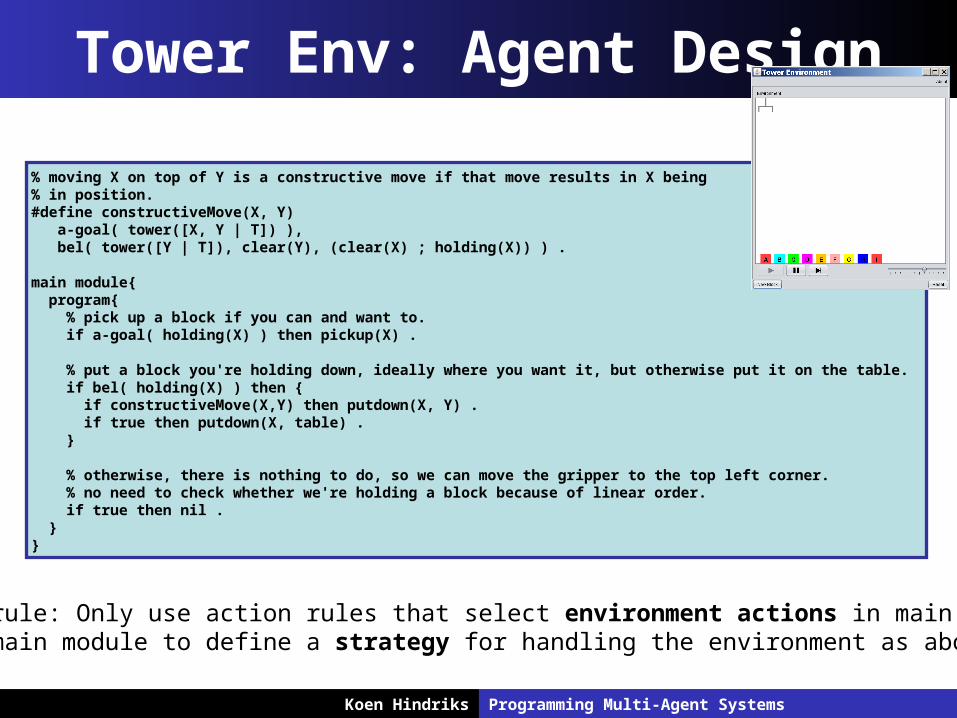
% moving X on top of Y is a constructive move if that move results in X being% in position.#define constructiveMove(X, Y) a-goal( tower([X, Y | T]) ), bel( tower([Y | T]), clear(Y), (clear(X) ; holding(X)) ) .
main module{ program{ % pick up a block if you can and want to. if a-goal( holding(X) ) then pickup(X) .
% put a block you're holding down, ideally where you want it, but otherwise put it on the table. if bel( holding(X) ) then { if constructiveMove(X,Y) then putdown(X, Y) . if true then putdown(X, table) . }
% otherwise, there is nothing to do, so we can move the gripper to the top left corner. % no need to check whether we're holding a block because of linear order. if true then nil . }}
Design rule: Only use action rules that select environment actions in main module.Use main module to define a strategy for handling the environment as above.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
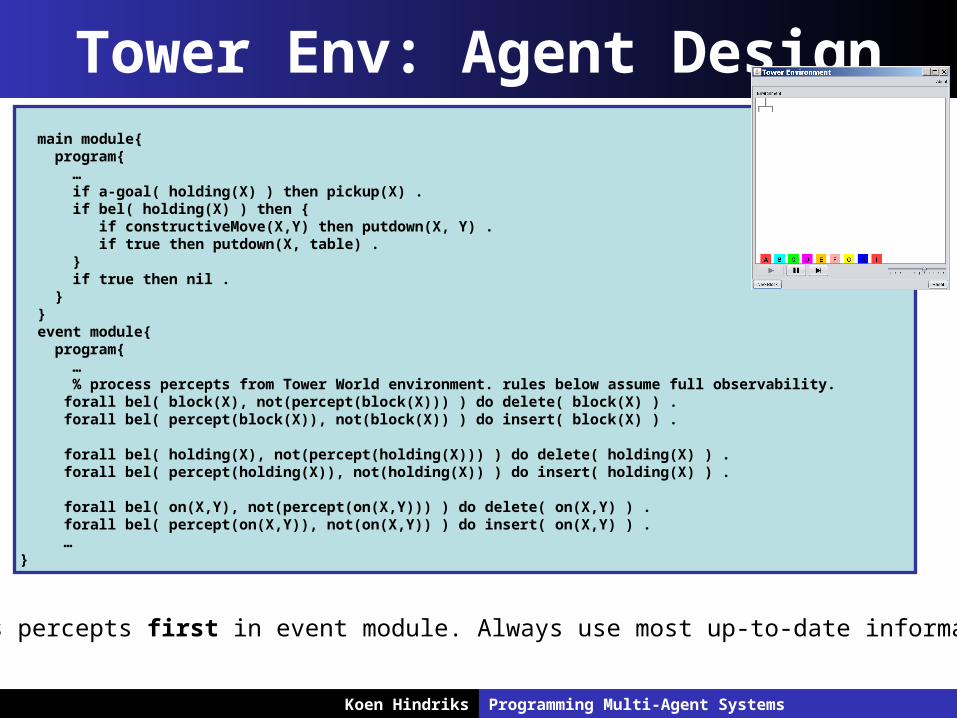
Tower Env: Agent Design main module{ program{ … if a-goal( holding(X) ) then pickup(X) . if bel( holding(X) ) then { if constructiveMove(X,Y) then putdown(X, Y) . if true then putdown(X, table) . } if true then nil . } } event module{ program{ … % process percepts from Tower World environment. rules below assume full observability. forall bel( block(X), not(percept(block(X))) ) do delete( block(X) ) . forall bel( percept(block(X)), not(block(X)) ) do insert( block(X) ) .
forall bel( holding(X), not(percept(holding(X))) ) do delete( holding(X) ) . forall bel( percept(holding(X)), not(holding(X)) ) do insert( holding(X) ) .
forall bel( on(X,Y), not(percept(on(X,Y))) ) do delete( on(X,Y) ) . forall bel( percept(on(X,Y)), not(on(X,Y)) ) do insert( on(X,Y) ) . …}
Process percepts first in event module. Always use most up-to-date information.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
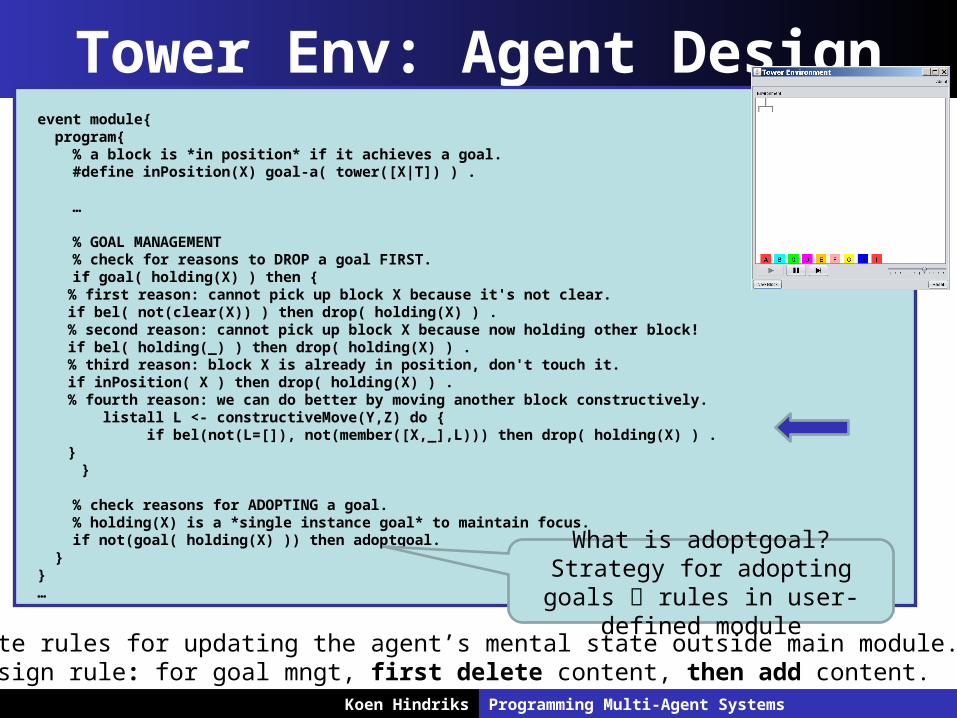
Tower Env: Agent Design event module{ program{ % a block is *in position* if it achieves a goal. #define inPosition(X) goal-a( tower([X|T]) ) .
…
% GOAL MANAGEMENT % check for reasons to DROP a goal FIRST. if goal( holding(X) ) then {
% first reason: cannot pick up block X because it's not clear.if bel( not(clear(X)) ) then drop( holding(X) ) .% second reason: cannot pick up block X because now holding other block!if bel( holding(_) ) then drop( holding(X) ) .% third reason: block X is already in position, don't touch it.if inPosition( X ) then drop( holding(X) ) .% fourth reason: we can do better by moving another block constructively. listall L <- constructiveMove(Y,Z) do { if bel(not(L=[]), not(member([X,_],L))) then drop( holding(X) ) .}
}
% check reasons for ADOPTING a goal. % holding(X) is a *single instance goal* to maintain focus. if not(goal( holding(X) )) then adoptgoal. } } …
Locate rules for updating the agent’s mental state outside main module.Design rule: for goal mngt, first delete content, then add content.
What is adoptgoal?Strategy for adopting goals rules in user-defined module
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
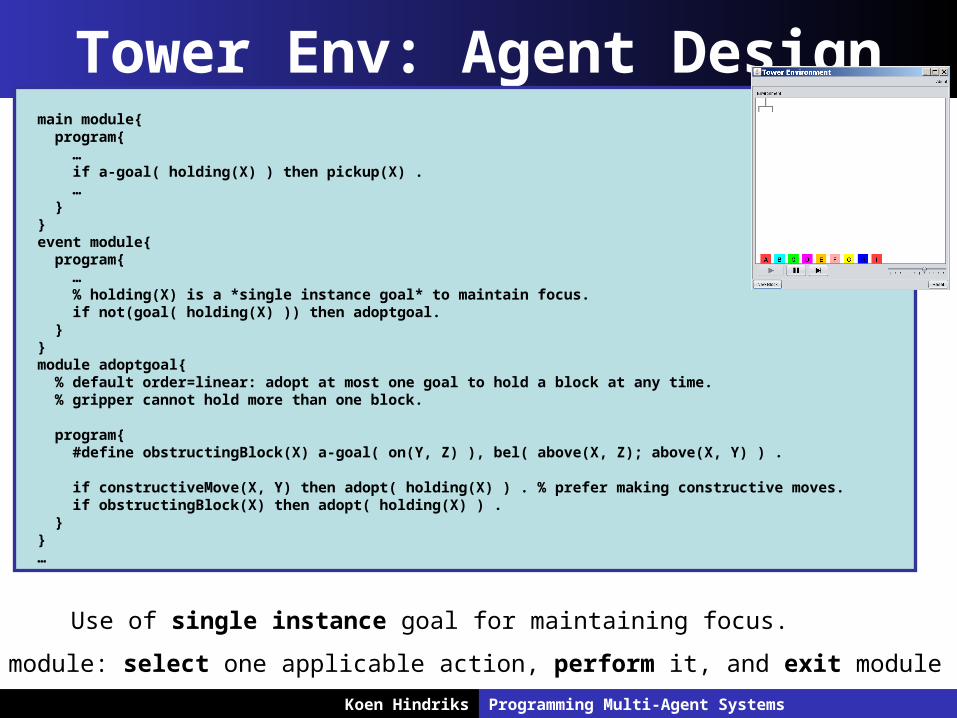
Tower Env: Agent Design main module{ program{ … if a-goal( holding(X) ) then pickup(X) . … } } event module{ program{ … % holding(X) is a *single instance goal* to maintain focus. if not(goal( holding(X) )) then adoptgoal. } } module adoptgoal{ % default order=linear: adopt at most one goal to hold a block at any time. % gripper cannot hold more than one block.
program{ #define obstructingBlock(X) a-goal( on(Y, Z) ), bel( above(X, Z); above(X, Y) ) .
if constructiveMove(X, Y) then adopt( holding(X) ) . % prefer making constructive moves. if obstructingBlock(X) then adopt( holding(X) ) . } } …
Standard module: select one applicable action, perform it, and exit module again.
Use of single instance goal for maintaining focus.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
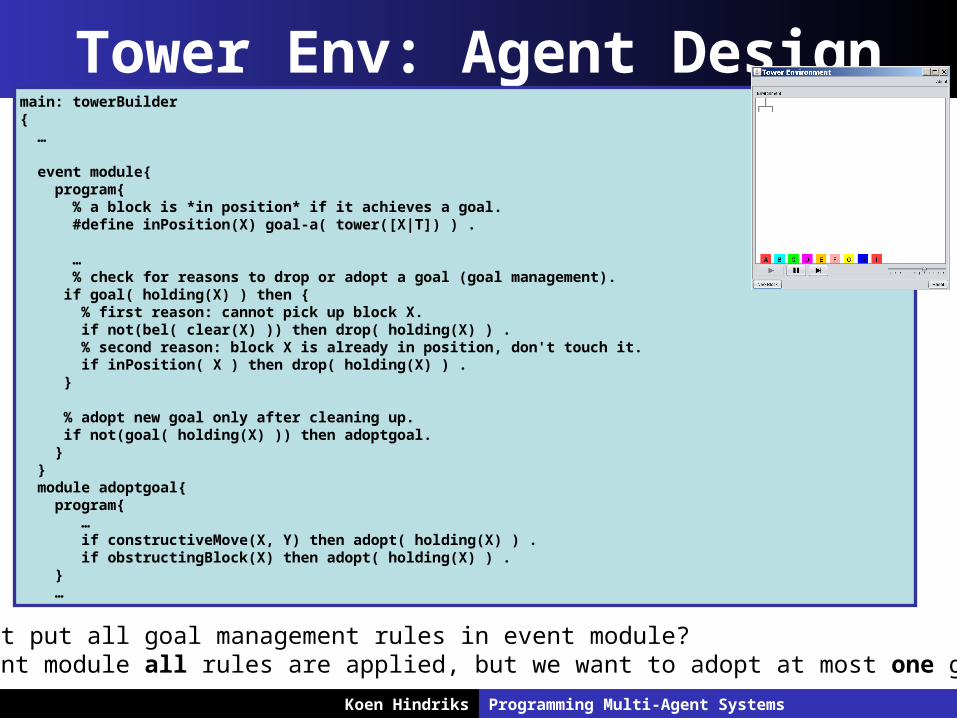
Tower Env: Agent Designmain: towerBuilder{ …
event module{ program{ % a block is *in position* if it achieves a goal. #define inPosition(X) goal-a( tower([X|T]) ) .
… % check for reasons to drop or adopt a goal (goal management). if goal( holding(X) ) then { % first reason: cannot pick up block X. if not(bel( clear(X) )) then drop( holding(X) ) . % second reason: block X is already in position, don't touch it. if inPosition( X ) then drop( holding(X) ) . }
% adopt new goal only after cleaning up. if not(goal( holding(X) )) then adoptgoal. } } module adoptgoal{ program{ … if constructiveMove(X, Y) then adopt( holding(X) ) . if obstructingBlock(X) then adopt( holding(X) ) . } …
Q: Why not put all goal management rules in event module?A: In event module all rules are applied, but we want to adopt at most one goal.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules:Focus of Attention and Control
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
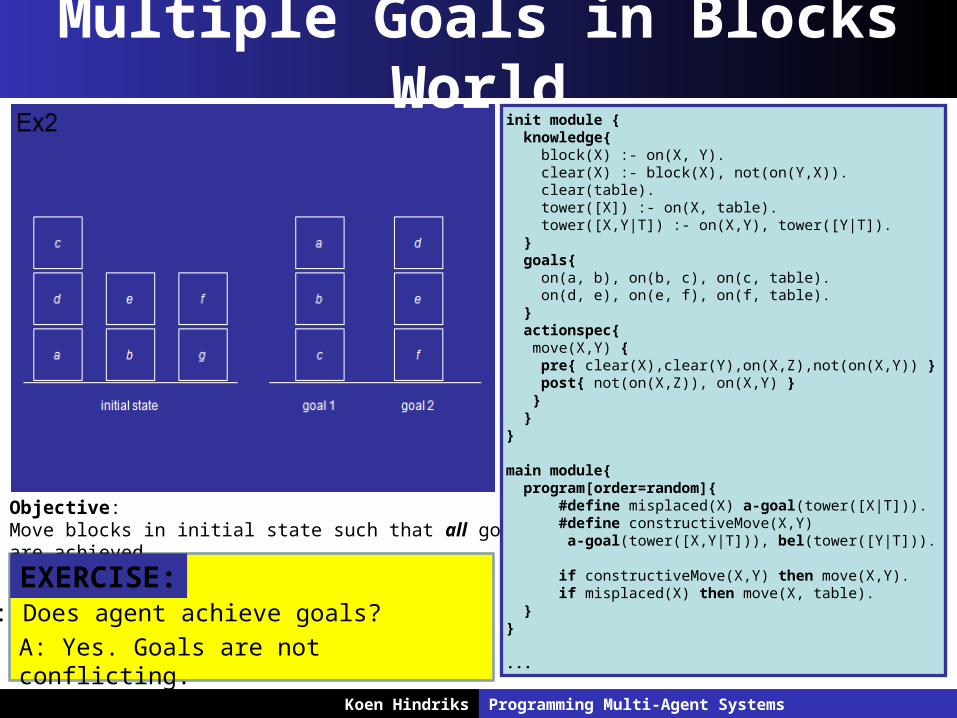
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). clear(table). tower([X]) :- on(X, table). tower([X,Y|T]) :- on(X,Y), tower([Y|T]). } goals{ on(a, b), on(b, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ move(X,Y) { pre{ clear(X),clear(Y),on(X,Z),not(on(X,Y)) } post{ not(on(X,Z)), on(X,Y) } } }}
main module{ program[order=random]{ #define misplaced(X) a-goal(tower([X|T])). #define constructiveMove(X,Y) a-goal(tower([X,Y|T])), bel(tower([Y|T])).
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X, table). }}
...
EXERCISE:Q: Does agent achieve goals?
A: Yes. Goals are not conflicting.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
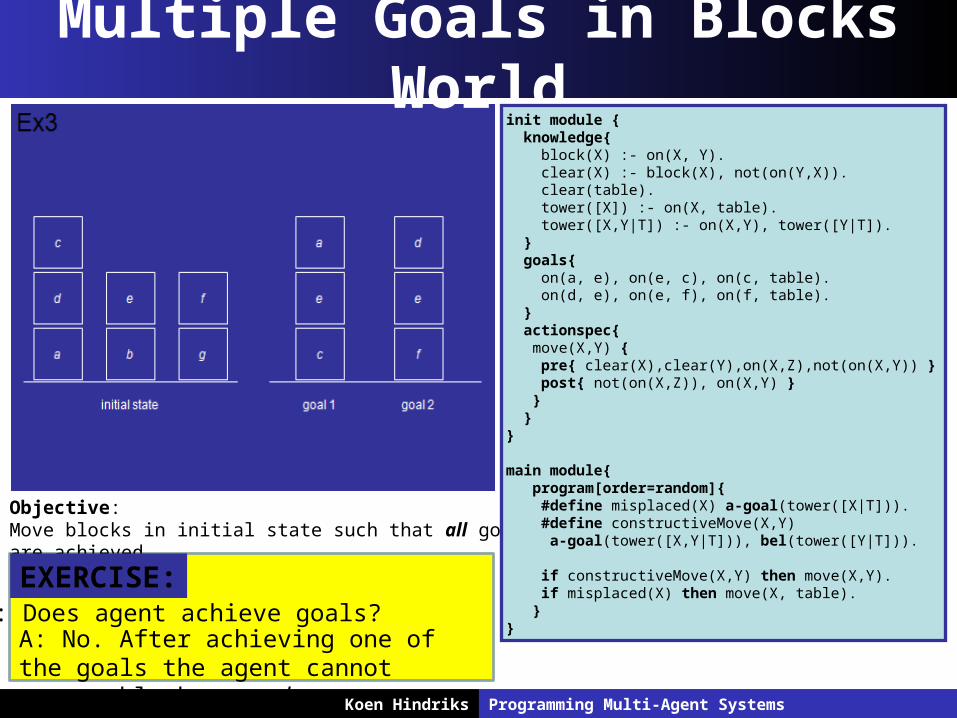
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). clear(table). tower([X]) :- on(X, table). tower([X,Y|T]) :- on(X,Y), tower([Y|T]). } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ move(X,Y) { pre{ clear(X),clear(Y),on(X,Z),not(on(X,Y)) } post{ not(on(X,Z)), on(X,Y) } } }} main module{ program[order=random]{ #define misplaced(X) a-goal(tower([X|T])). #define constructiveMove(X,Y) a-goal(tower([X,Y|T])), bel(tower([Y|T])).
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X, table). }}
EXERCISE:Q: Does agent achieve goals?A: No. After achieving one of the goals the agent cannot remove block a or d.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
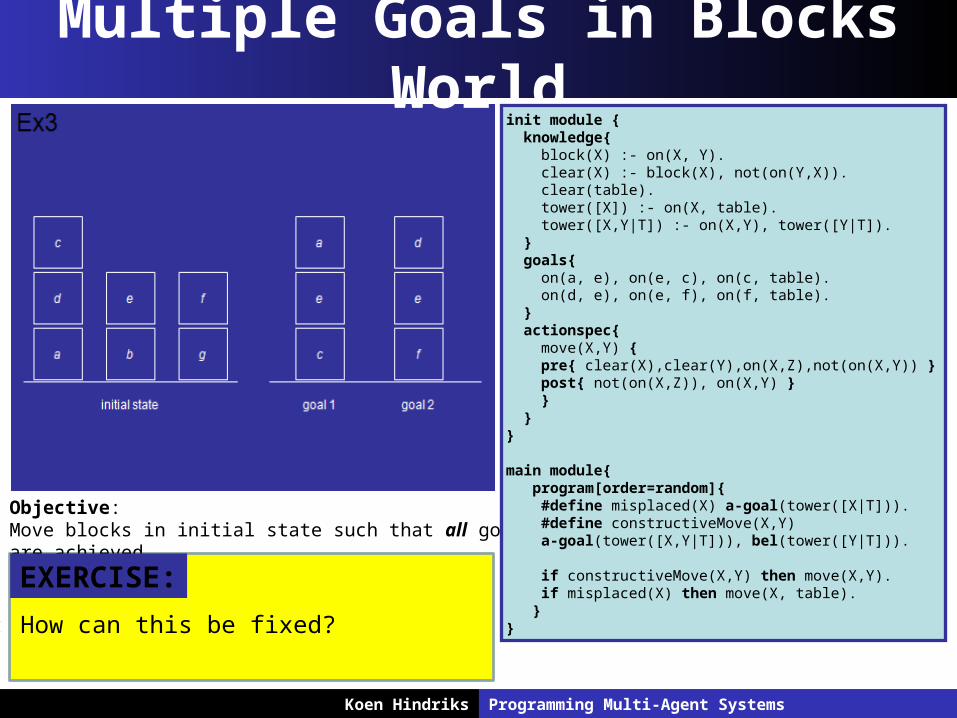
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). clear(table). tower([X]) :- on(X, table). tower([X,Y|T]) :- on(X,Y), tower([Y|T]). } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ move(X,Y) { pre{ clear(X),clear(Y),on(X,Z),not(on(X,Y)) } post{ not(on(X,Z)), on(X,Y) } } }}
main module{ program[order=random]{ #define misplaced(X) a-goal(tower([X|T])). #define constructiveMove(X,Y) a-goal(tower([X,Y|T])), bel(tower([Y|T])).
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X, table). }}
EXERCISE:
Q: How can this be fixed?
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
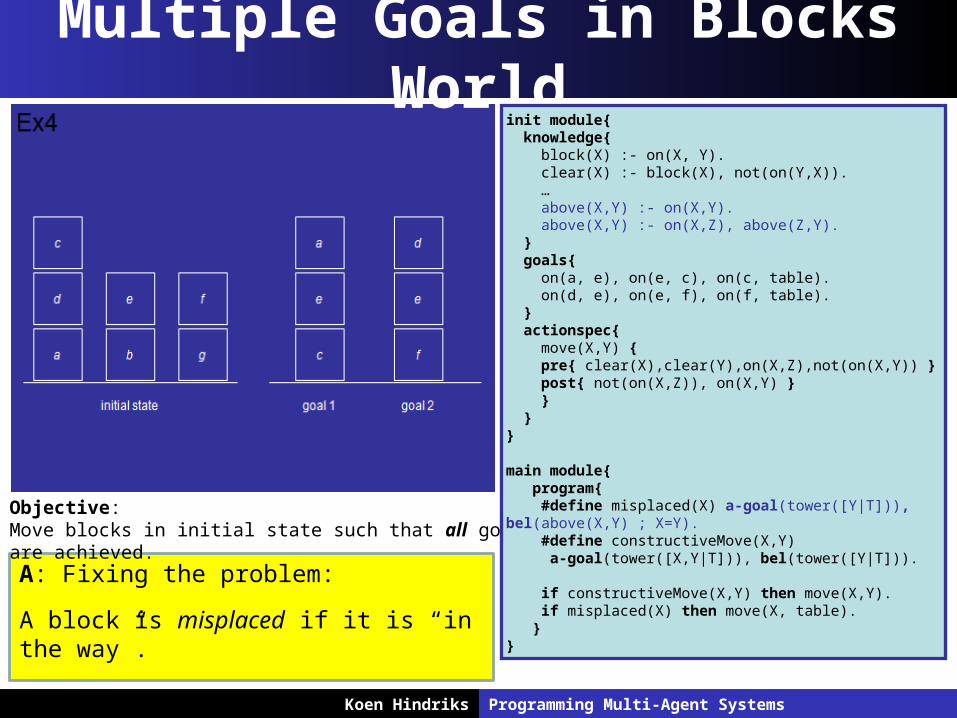
A: Fixing the problem:
A block is misplaced if it is “in the way”.
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module{ knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … above(X,Y) :- on(X,Y). above(X,Y) :- on(X,Z), above(Z,Y). } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ move(X,Y) { pre{ clear(X),clear(Y),on(X,Z),not(on(X,Y)) } post{ not(on(X,Z)), on(X,Y) } } }}
main module{ program{ #define misplaced(X) a-goal(tower([Y|T])),
bel(above(X,Y) ; X=Y). #define constructiveMove(X,Y) a-goal(tower([X,Y|T])), bel(tower([Y|T])).
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X, table). }}

Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
But the agent achieves its goalsvery inefficiently!!
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
Agent performs action: move(c,table)Agent performs action: move(e,table)Agent performs action: move(f,table)Agent performs action: move(d,table)Agent performs action: move(e,c)Agent performs action: move(e,table)Agent performs action: move(e,c)Agent performs action: move(e,table)Agent performs action: move(e,f)Agent performs action: move(e,c)Agent performs action: move(e,f)Agent performs action: move(e,c)Agent performs action: move(e,table)Agent performs action: move(e,c)Agent performs action: move(e,f)Agent performs action: move(e,table)Agent performs action: move(e,c)Agent performs action: move(e,f)Agent performs action: move(d,e)Agent performs action: move(d,table)Agent performs action: move(e,table)Agent performs action: move(e,c)Agent performs action: move(f,table)Agent performs action: move(e,f)Agent performs action: move(e,table)Agent performs action: move(e,f)Agent performs action: move(e,table)Agent performs action: move(e,f)…Agent performs action: move(e,f)Agent performs action: move(d,e)
(Continued)
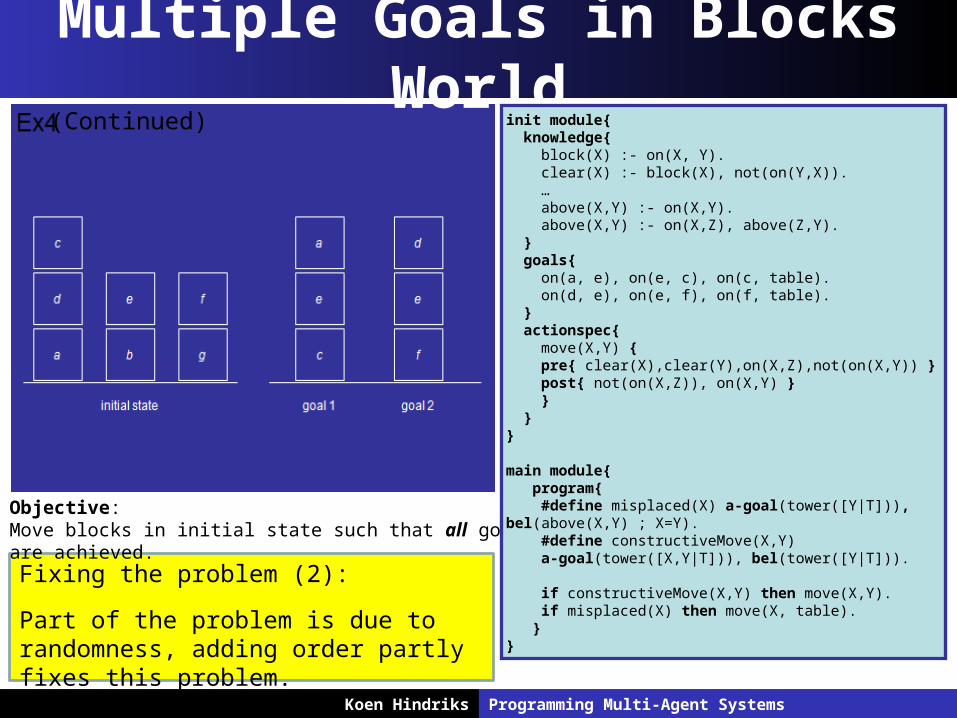
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Fixing the problem (2):
Part of the problem is due to randomness, adding order partly fixes this problem.
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module{ knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … above(X,Y) :- on(X,Y). above(X,Y) :- on(X,Z), above(Z,Y). } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ move(X,Y) { pre{ clear(X),clear(Y),on(X,Z),not(on(X,Y)) } post{ not(on(X,Z)), on(X,Y) } } }}
main module{ program{ #define misplaced(X) a-goal(tower([Y|T])),
bel(above(X,Y) ; X=Y). #define constructiveMove(X,Y) a-goal(tower([X,Y|T])), bel(tower([Y|T])).
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X, table). }}
(Continued)
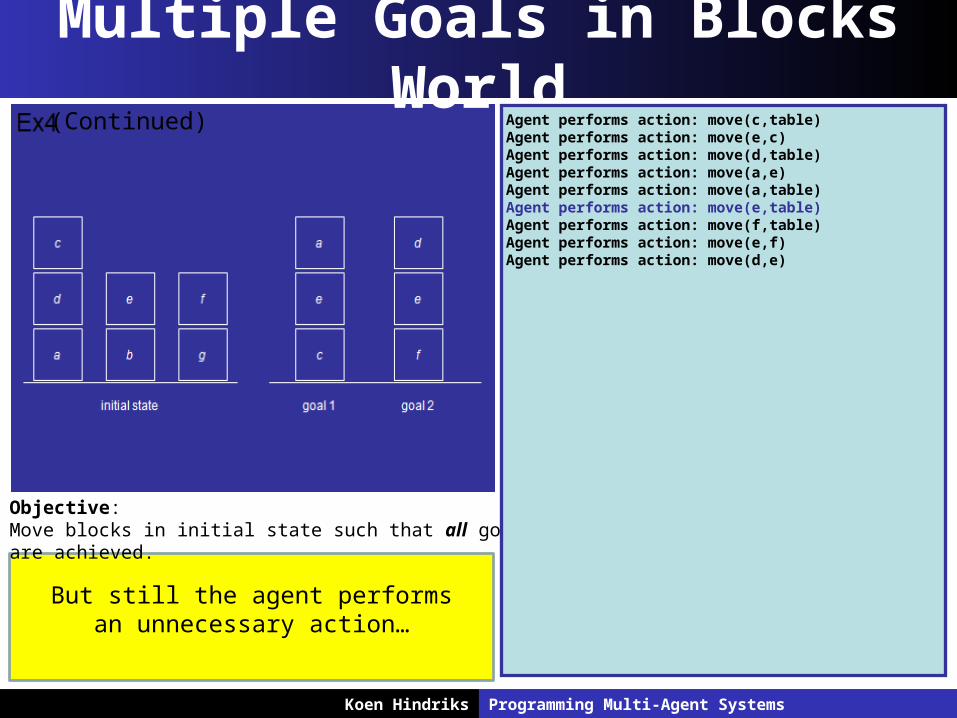
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
But still the agent performsan unnecessary action…
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
Agent performs action: move(c,table)Agent performs action: move(e,c)Agent performs action: move(d,table)Agent performs action: move(a,e)Agent performs action: move(a,table)Agent performs action: move(e,table)Agent performs action: move(f,table)Agent performs action: move(e,f)Agent performs action: move(d,e)
(Continued)
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
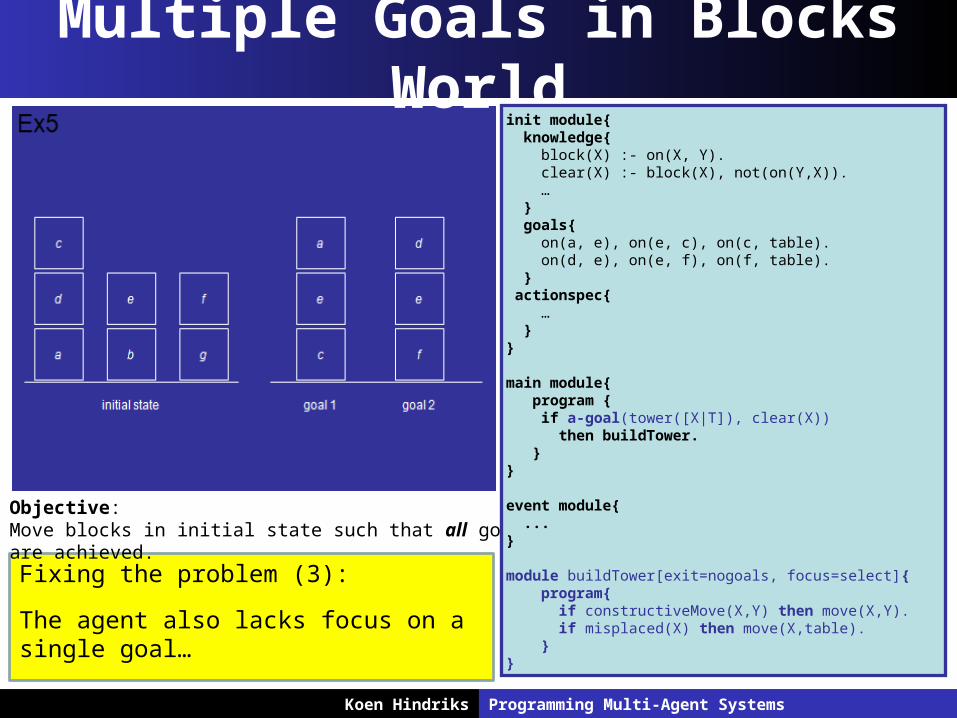
Fixing the problem (3):
The agent also lacks focus on a single goal…
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
init module{ knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ … }}
main module{ program { if a-goal(tower([X|T]), clear(X)) then buildTower. }}
event module{ ...}
module buildTower[exit=nogoals, focus=select]{ program{ if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X,table). }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
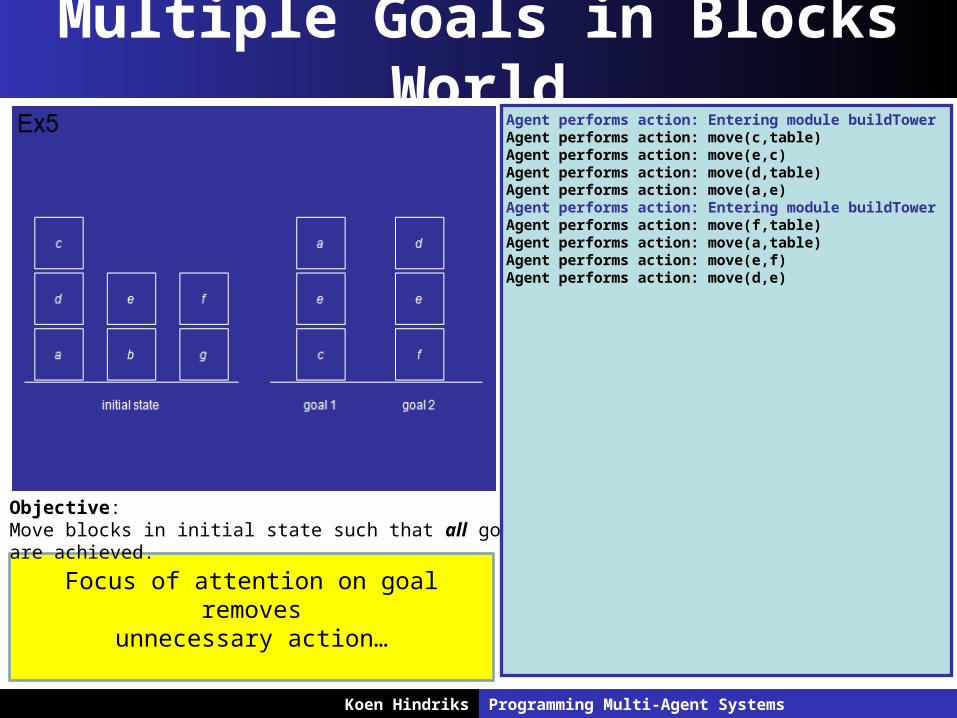
Focus of attention on goal removesunnecessary action…
Multiple Goals in Blocks World
Objective:Move blocks in initial state such that all goals are achieved.
Agent performs action: Entering module buildTowerAgent performs action: move(c,table)Agent performs action: move(e,c)Agent performs action: move(d,table)Agent performs action: move(a,e)Agent performs action: Entering module buildTowerAgent performs action: move(f,table)Agent performs action: move(a,table)Agent performs action: move(e,f)Agent performs action: move(d,e)
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
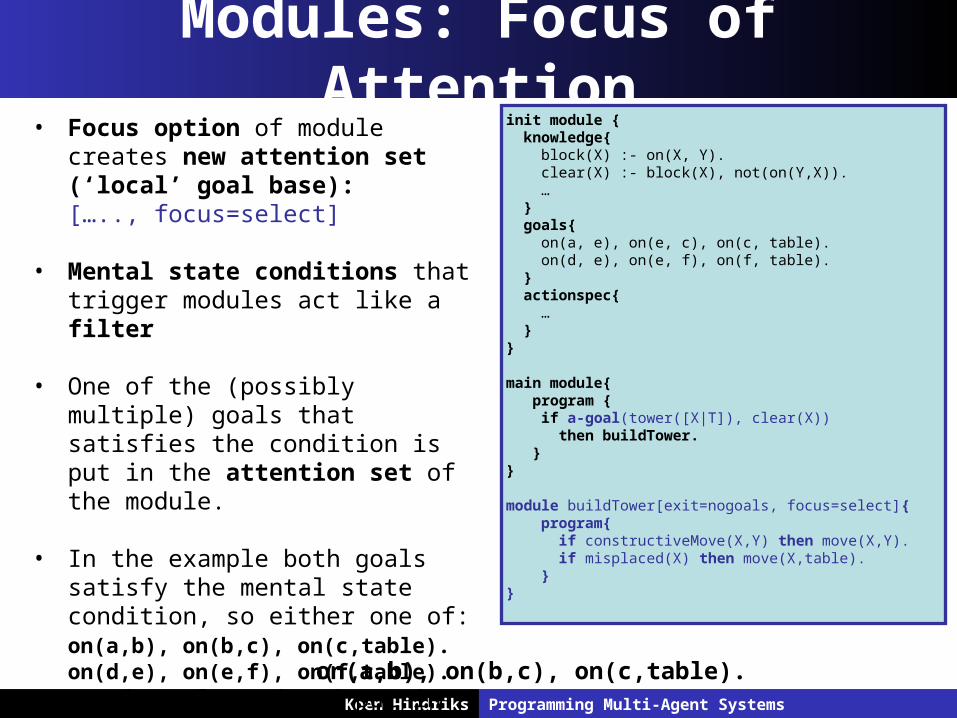
Modules: Focus of Attentioninit module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ … }} main module{ program { if a-goal(tower([X|T]), clear(X)) then buildTower. }}
module buildTower[exit=nogoals, focus=select]{ program{ if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X,table). }}
• Focus option of module creates new attention set (‘local’ goal base):[….., focus=select]
• Mental state conditions that trigger modules act like a filter
• One of the (possibly multiple) goals that satisfies the condition is put in the attention set of the module.
• In the example both goals satisfy the mental state condition, so either one of:on(a,b), on(b,c), on(c,table).on(d,e), on(e,f), on(f,table).may be selected and put in the attention set of the module.
• For example, attention set for buildTower module is: on(a,b), on(b,c), on(c,table).
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
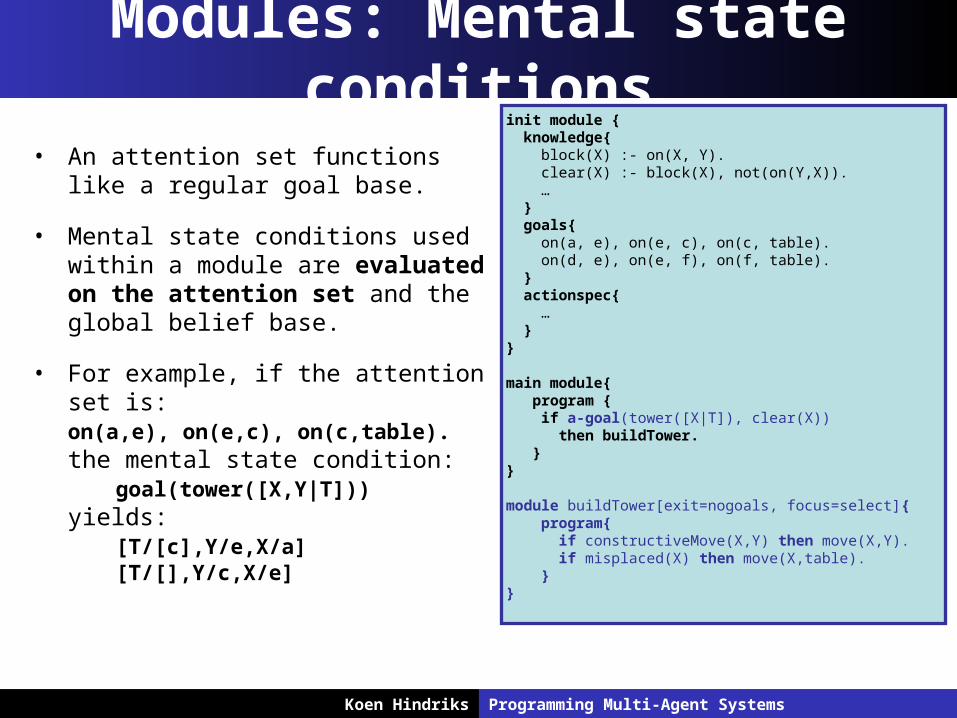
Modules: Mental state conditions
• An attention set functions like a regular goal base.
• Mental state conditions used within a module are evaluated on the attention set and the global belief base.
• For example, if the attention set is:on(a,e), on(e,c), on(c,table).the mental state condition:
goal(tower([X,Y|T]))yields:
[T/[c],Y/e,X/a][T/[],Y/c,X/e]
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ … }} main module{ program { if a-goal(tower([X|T]), clear(X)) then buildTower. }}
module buildTower[exit=nogoals, focus=select]{ program{ if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X,table). }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules: Action Rules
When a module is activated:• Only action rules within the module’s program
section are applied.• Provides:
– a scoping mechanism.– encapsulation of action logic.
• Actions specified outside module that are specified in init module may be used.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules: Options• Set exit condition using [exit=…][exit=always] : Always exit (default)
[exit=nogoals] : Exit focus goals have been achieved.
[exit=noaction] : Exit when no actions are enabled.
• Set filter condition using [focus=…][focus=none] : no new attention set, global goal base used (default)
[focus=new] : new empty attention set is used instead of global gb
[focus=select] : new attention set with selected goal instead of global gb
[focus=filter] : new attention set with filtered goal instead of global gb
NB: Setting rule order option using [order=…] is associated with program sections, NOT modules. Options are:
Default : [order=linear]Other options : random, linearall, randomall
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules: Focus=Filter (Example)• Suppose current goal is:
on(a,b), on(b,c), on(c,table), on(d,e), on(e,f), on(f,table), maintain.
• Then mental state condition:a-goal(tower([X,Y|T])),bel(tower([Y|T]),clear(Y),(clear(X);holding(X)))
and filter focus yields goals of the form:
tower([a,b,c])
a-goal(on(X,table)), bel(clear(X); holding(X))
yields goals of the form:
on(a,table)
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
focus = filter, select• A mental state only acts as a method to focus
on a goal if it contains at least one positive goal literal.
• a-goal(…), goal(…), goal-a(…) are positive goal literals.
these act to select a focus goal.
• not(a-goal(…)), not(goal(…)), not(goal-a(…)) are negative goal literals.
these do not select or filter goals.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
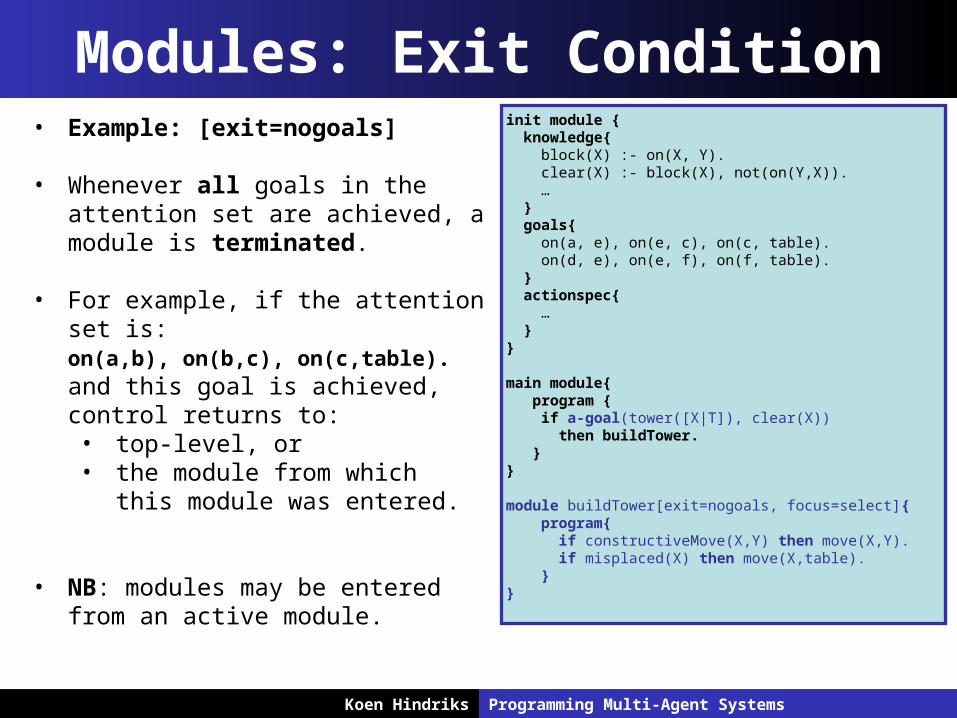
Modules: Exit Condition• Example: [exit=nogoals]
• Whenever all goals in the attention set are achieved, a module is terminated.
• For example, if the attention set is:on(a,b), on(b,c), on(c,table).and this goal is achieved, control returns to:• top-level, or• the module from which this
module was entered.
• NB: modules may be entered from an active module.
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ … }} main module{ program { if a-goal(tower([X|T]), clear(X)) then buildTower. }}
module buildTower[exit=nogoals, focus=select]{ program{ if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X,table). }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
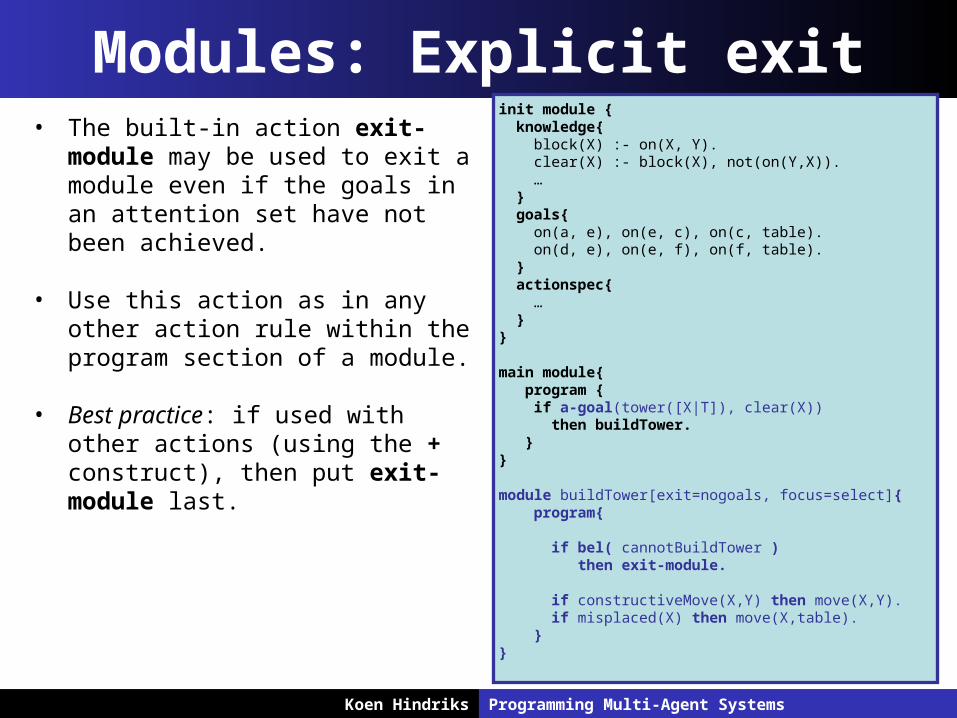
Modules: Explicit exit• The built-in action exit-module may be
used to exit a module even if the goals in an attention set have not been achieved.
• Use this action as in any other action rule within the program section of a module.
• Best practice: if used with other actions (using the + construct), then put exit-module last.
init module { knowledge{ block(X) :- on(X, Y). clear(X) :- block(X), not(on(Y,X)). … } goals{ on(a, e), on(e, c), on(c, table). on(d, e), on(e, f), on(f, table). } actionspec{ … }} main module{ program { if a-goal(tower([X|T]), clear(X)) then buildTower. }}
module buildTower[exit=nogoals, focus=select]{ program{
if bel( cannotBuildTower ) then exit-module.
if constructiveMove(X,Y) then move(X,Y). if misplaced(X) then move(X,table). }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Modules: Adopt and Drop• Semantics of the built-in adopt and drop
action within modules:
• adopt action within module:– Adds goal to the current attention set.– Only local effect.
• drop action within module:– Removes goal from all attention sets (including
global goal base)– Has global effect.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
BW4T ASSIGNMENT
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
A Working Program• Your agent program should solve the task:
deliver blocks in right order to drop zone.
• It does not need to perform optimally but some efficiency would be nice:– Do not visit rooms more often than needed.– I.e., keep track of what has been visited!
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
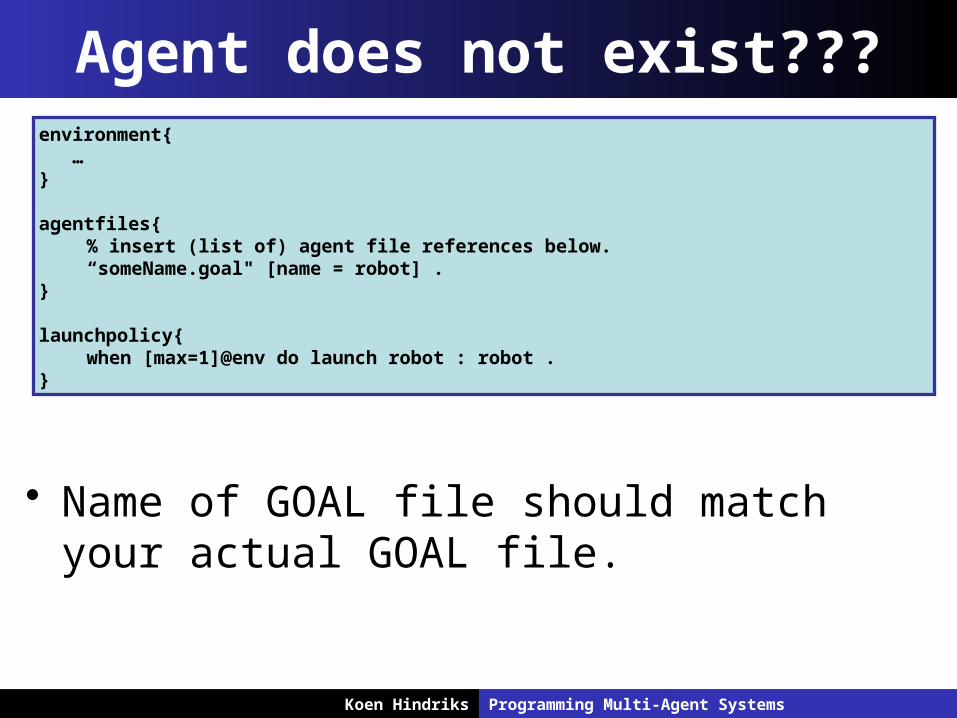
Agent does not exist???
• Name of GOAL file should match your actual GOAL file.
environment{ …}
agentfiles{% insert (list of) agent file references below.“someName.goal" [name = robot] .
}
launchpolicy{when [max=1]@env do launch robot : robot .
}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
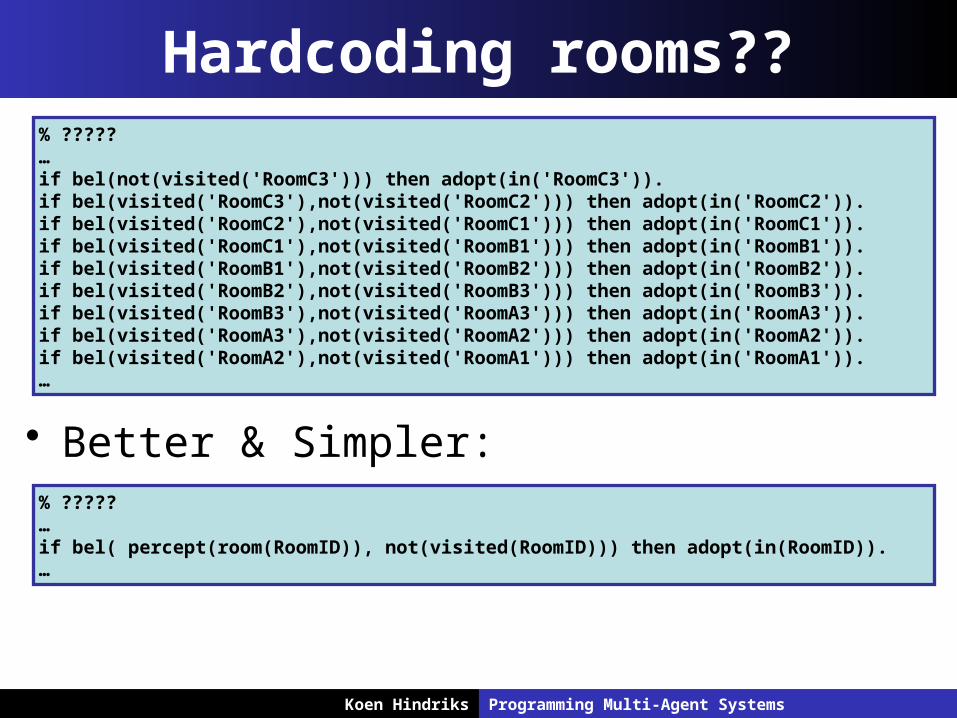
Hardcoding rooms??
• Better & Simpler:
% ?????…if bel(not(visited('RoomC3'))) then adopt(in('RoomC3')).if bel(visited('RoomC3'),not(visited('RoomC2'))) then adopt(in('RoomC2')).if bel(visited('RoomC2'),not(visited('RoomC1'))) then adopt(in('RoomC1')).if bel(visited('RoomC1'),not(visited('RoomB1'))) then adopt(in('RoomB1')).if bel(visited('RoomB1'),not(visited('RoomB2'))) then adopt(in('RoomB2')).if bel(visited('RoomB2'),not(visited('RoomB3'))) then adopt(in('RoomB3')).if bel(visited('RoomB3'),not(visited('RoomA3'))) then adopt(in('RoomA3')).if bel(visited('RoomA3'),not(visited('RoomA2'))) then adopt(in('RoomA2')).if bel(visited('RoomA2'),not(visited('RoomA1'))) then adopt(in('RoomA1')).…
% ?????…if bel( percept(room(RoomID)), not(visited(RoomID))) then adopt(in(RoomID)).…
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Specifying Durative Actions• BW4T has instantaneous & durative actions.• Which of the following are durative?
– pickUp– putDown– goTo– goToBlock
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
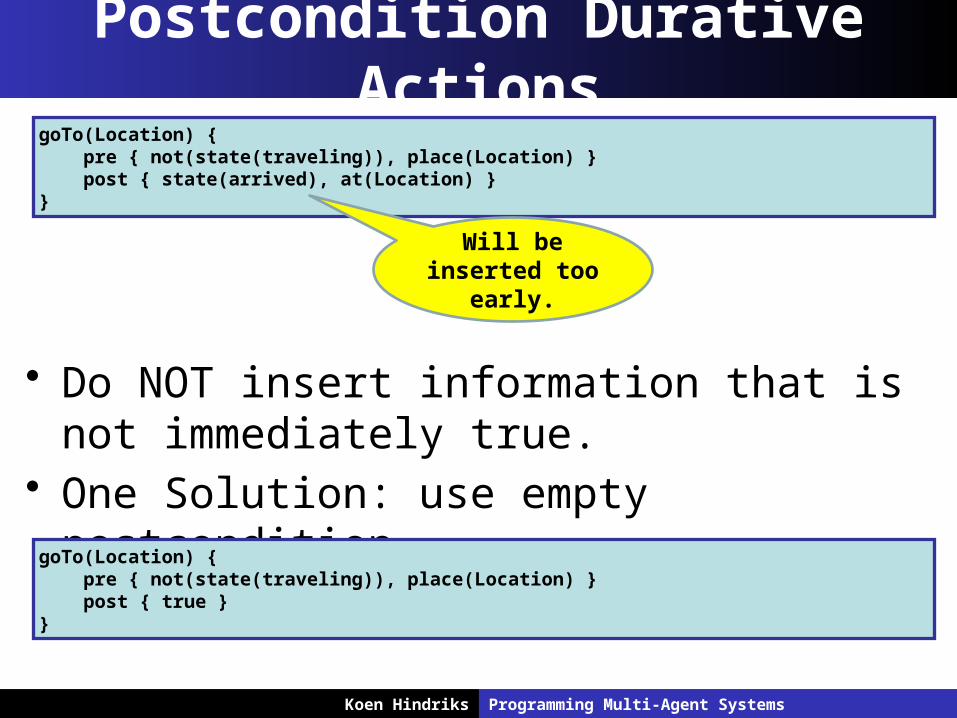
Postcondition Durative Actions
• Do NOT insert information that is not immediately true.
• One Solution: use empty postcondition
goTo(Location) { pre { not(state(traveling)), place(Location) } post { state(arrived), at(Location) }}
Will be inserted too early.
goTo(Location) { pre { not(state(traveling)), place(Location) } post { true }}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
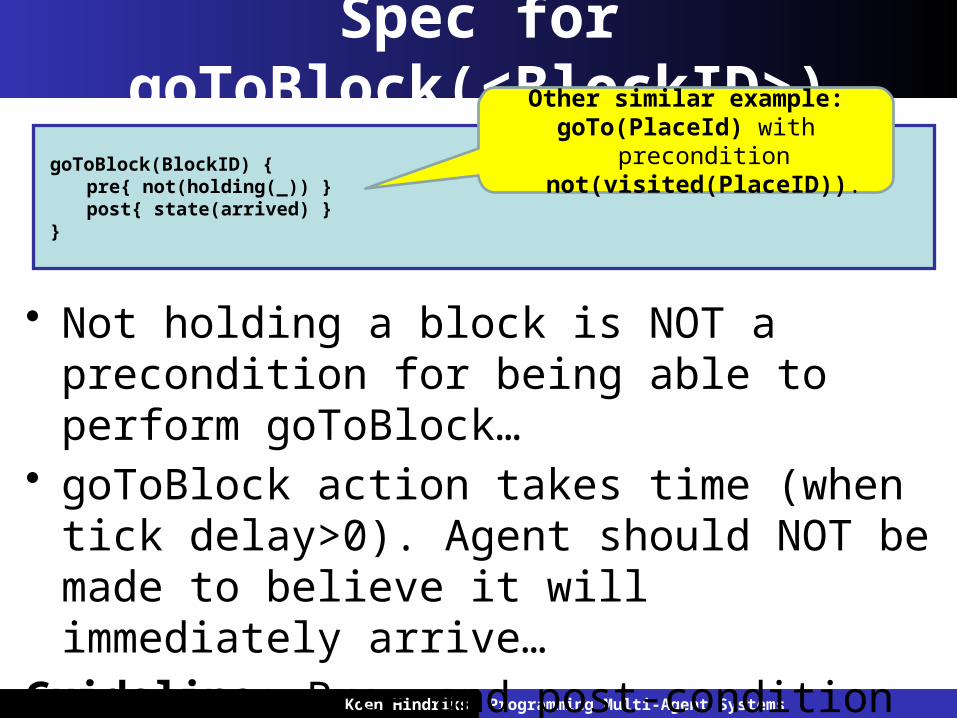
Spec for goToBlock(<BlockID>)
• Not holding a block is NOT a precondition for being able to perform goToBlock…
• goToBlock action takes time (when tick delay>0). Agent should NOT be made to believe it will immediately arrive…
Guideline: Pre- and post-condition should match real conditions present in environment!
goToBlock(BlockID) {
pre{ not(holding(_)) }post{ state(arrived) }
}
Other similar example:goTo(PlaceId) with precondition
not(visited(PlaceID)).
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
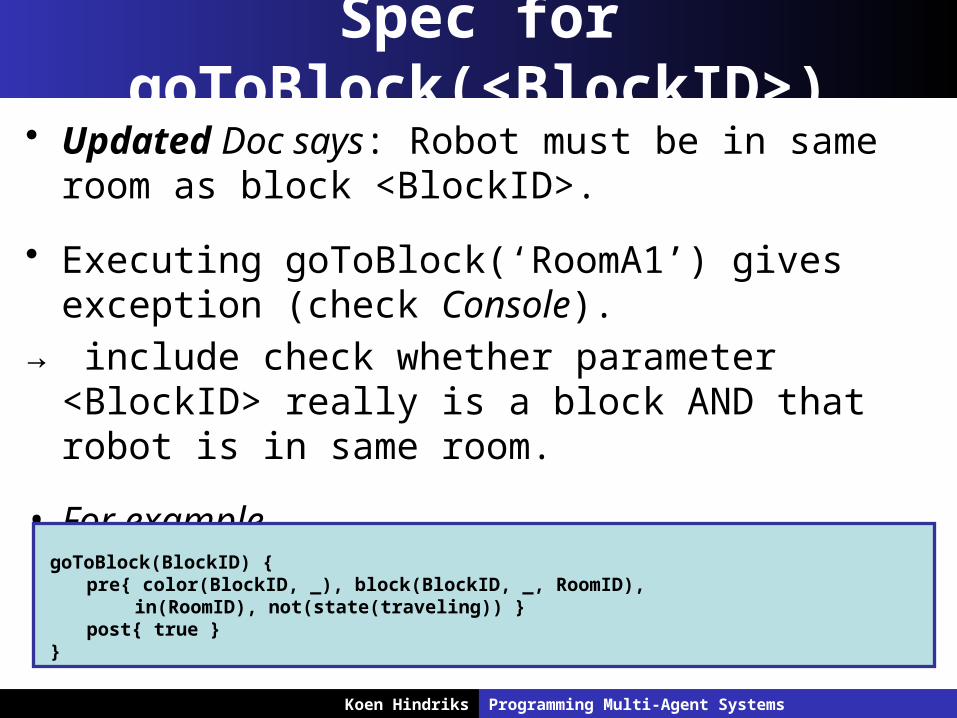
Spec for goToBlock(<BlockID>)• Updated Doc says: Robot must be in same room as
block <BlockID>.
• Executing goToBlock(‘RoomA1’) gives exception (check Console).
→ include check whether parameter <BlockID> really is a block AND that robot is in same room.
• For example,
goToBlock(BlockID) {
pre{ color(BlockID, _), block(BlockID, _, RoomID),in(RoomID), not(state(traveling)) }
post{ true } }
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
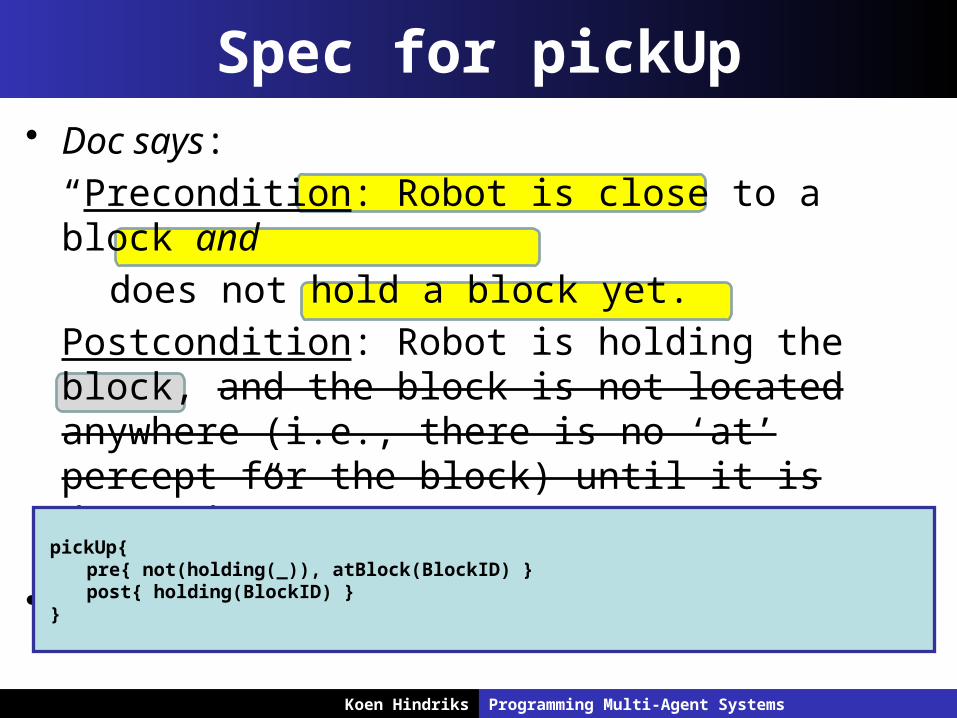
Spec for pickUp• Doc says:
“Precondition: Robot is close to a block and
does not hold a block yet.
Postcondition: Robot is holding the block, and the block is not located anywhere (i.e., there is no ‘at’ percept for the block) until it is dropped.”
• For example, pickUp{
pre{ not(holding(_)), atBlock(BlockID) }post{ holding(BlockID) }
}
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
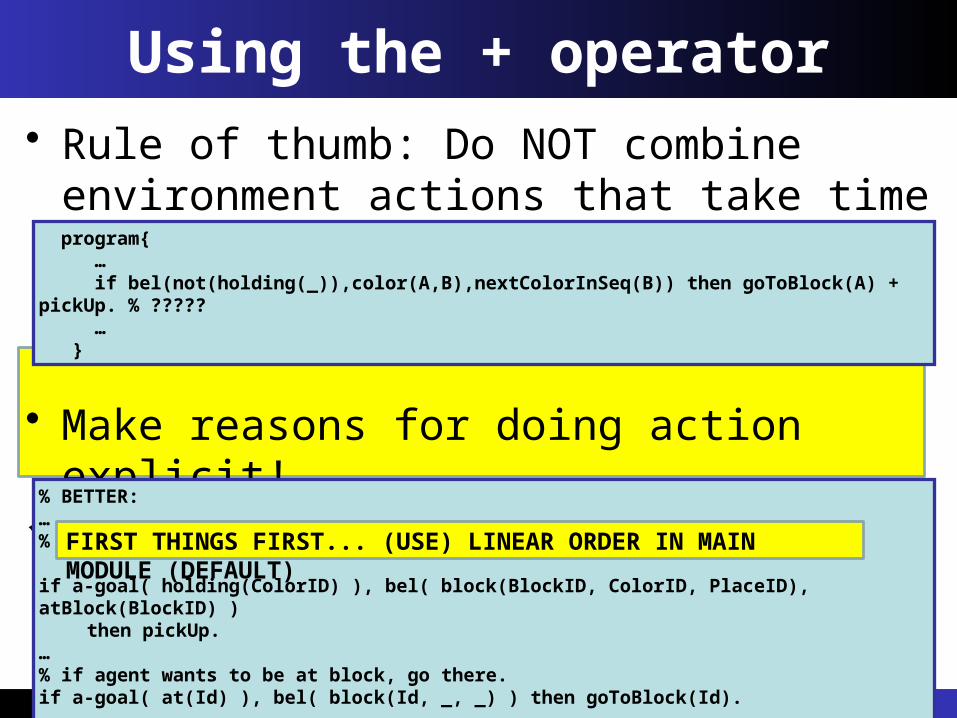
Using the + operator• Rule of thumb: Do NOT combine environment
actions that take time with + operator.
• Make reasons for doing action explicit!Increases agent’s flexibility & code readability
program{ … if bel(not(holding(_)),color(A,B),nextColorInSeq(B)) then goToBlock(A) + pickUp. % ????? … }
% BETTER:…% FIRST THINGS FIRST... LINEAR ORDER IN MAIN MODULE BY DEFAULT
if a-goal( holding(ColorID) ), bel( block(BlockID, ColorID, PlaceID), atBlock(BlockID) )
then pickUp.…% if agent wants to be at block, go there.if a-goal( at(Id) ), bel( block(Id, _, _) ) then goToBlock(Id).…
FIRST THINGS FIRST... (USE) LINEAR ORDER IN MAIN MODULE (DEFAULT)
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
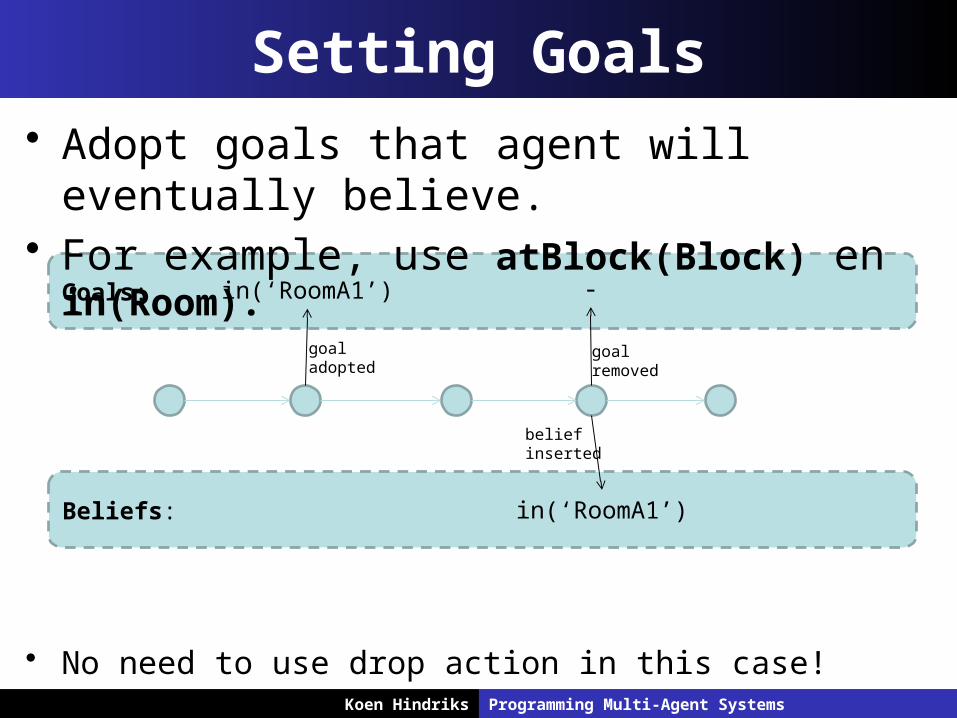
Beliefs:
Goals:
Setting Goals• Adopt goals that agent will eventually believe.• For example, use atBlock(Block) en in(Room).
• No need to use drop action in this case!
in(‘RoomA1’)
in(‘RoomA1’)
goal adopted
-
beliefinserted
goalremoved
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
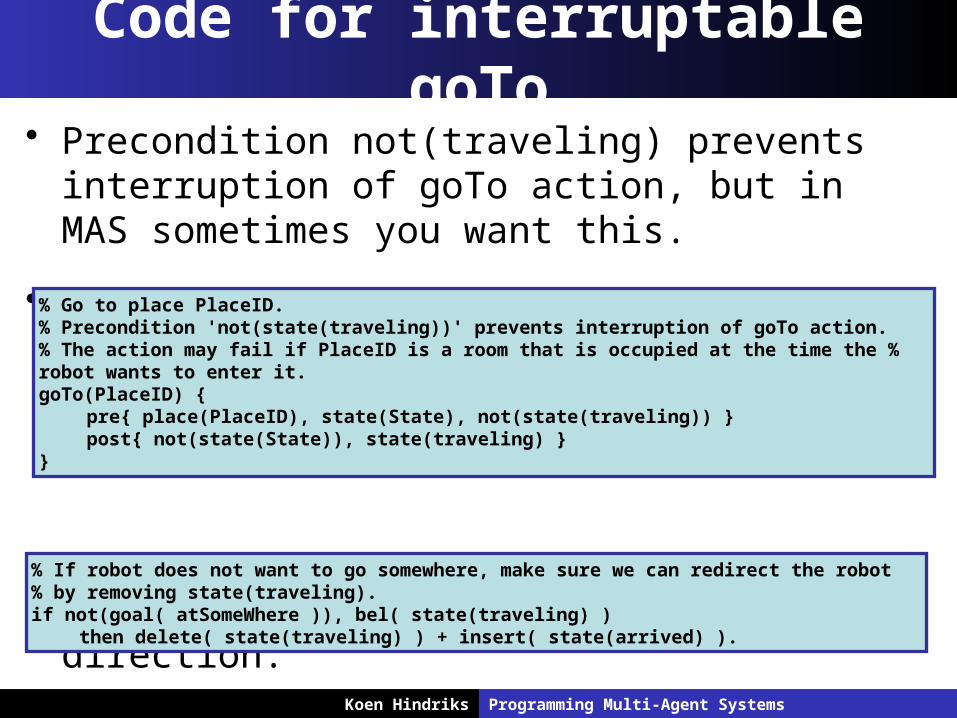
Code for interruptable goTo• Precondition not(traveling) prevents interruption of
goTo action, but in MAS sometimes you want this.
• For example (N.B.: different from spec above!)
• Plus remove not(traveling) to change direction:
• Instead of not(goal( atSomeWhere)) use own reason
% Go to place PlaceID.% Precondition 'not(state(traveling))' prevents interruption of goTo action.% The action may fail if PlaceID is a room that is occupied at the time the % robot wants to enter it.goTo(PlaceID) {
pre{ place(PlaceID), state(State), not(state(traveling)) }post{ not(state(State)), state(traveling) }
}
% If robot does not want to go somewhere, make sure we can redirect the robot% by removing state(traveling).if not(goal( atSomeWhere )), bel( state(traveling) )
then delete( state(traveling) ) + insert( state(arrived) ).
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
ASK QUESTIONS!• If YOU cannot solve a problem…
• There are at least FOUR THINGS you can do:
1. Check http://mmi.tudelft.nl/trac/goal.
2. Check Programming Guide.
3. Check FAQ on GOAL website.
4. Send mail to [email protected] or Assistants.
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
!! DOCUMENTATION !!
Document your code using COMMENTS!
• Solution can be provided in about 100 lines of code.
• But then add at least half that amount to document and explain your code
Koen Hindriks Programming Multi-Agent SystemsKoen Hindriks Programming Multi-Agent Systems
Organisation
• Next lecture: Multi-Agent Systems
• Tutorial this week:– Assignment 4: BW4T MAS
• Updated GOAL Installer available at: http://ii.tudelft.nl/trac/goal/wiki/Releases.
includes:– Simplified reset/restart for BW4T.