Kasper jeppesen dti
39
Kasper C. Jeppesen, Danish Tecnological Institute [email protected] Autonomous robots as an enabler for autonomous vehicles
-
Upload
infinit-innovationsnetvaerket-for-it -
Category
Technology
-
view
122 -
download
0
Transcript of Kasper jeppesen dti

Kasper C. Jeppesen, Danish Tecnological [email protected]
Autonomous robots as an enabler for autonomous vehicles

Development in robot technology

Coexistingsystems
Physically separatesystems
Human-RobotCollaboration: CoWorker
Development in industrial robot technology
Robot manipulators
Traditional AGVs
Development in robot technology

Coexistingsystems
Physically separatesystems
Human-RobotCollaboration: CoWorker
Development in industrial robot technology
Robot manipulators
Traditional AGVs
Development in robot technology

Coexistingsystems
Physically separatesystems
Human-RobotCollaboration: CoWorker
Development in industrial robot technology
Robot manipulators
Traditional AGVs New mobile service robots
Development in robot technology

Mobile service robots
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

Mobile service robots
• General purpose platform
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

Mobile service robots
• General purpose platform• A to B transport
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

Mobile service robots
• General purpose platform• A to B transport• Safe among people
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

Mobile service robots
• General purpose platform• A to B transport• Safe among people• Easy to setup and integrate
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

Mobile service robots
• General purpose platform• A to B transport• Safe among people• Easy to setup and integrate• High reconfigurability
FIGUR 1 - MIR100 FRA MOBILE
INDUSTRIAL ROBOTS
FIGUR 2 - MP400 FRA NEOBOTIX
FIGUR 3 - LYNX FRA ADEPT
FIGUR 4 - MPO-700 FRA
NEOBOTIX
FIGUR 5 - AMV-1 FRA
BLUEBOTICS
FIGUR 6 - MP500 FRA NEOBOTIX

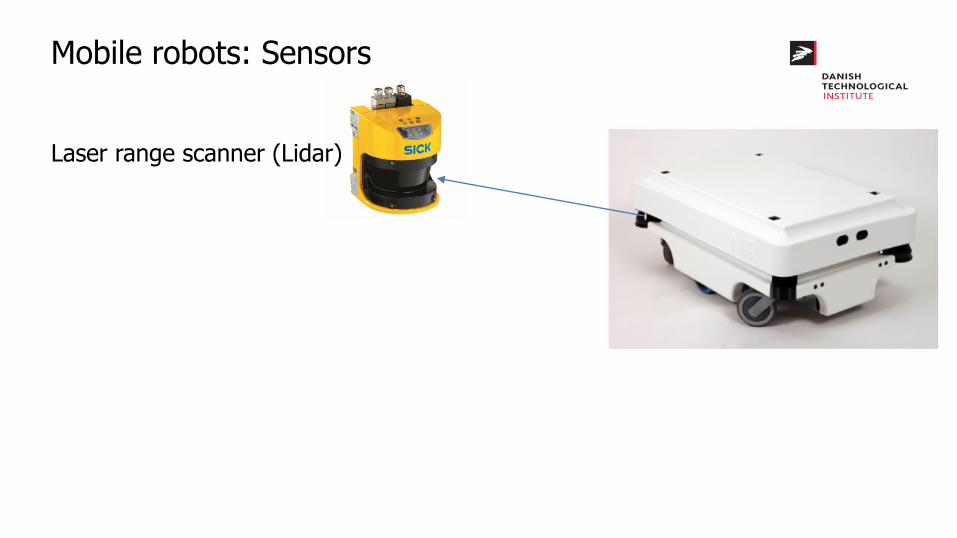
Mobile robots: Sensors
Mobile robots: Sensors
Laser range scanner (Lidar)

Mobile robots: Sensors
Laser range scanner (Lidar)
Camera

Mobile robots: Sensors
Laser range scanner (Lidar)
Camera
Wheel encoders

Mobile robots: Sensors
Laser range scanner (Lidar)
Camera
Wheel encoders
Inertial Measurement Unit

Mobile robots: Navigation and localization

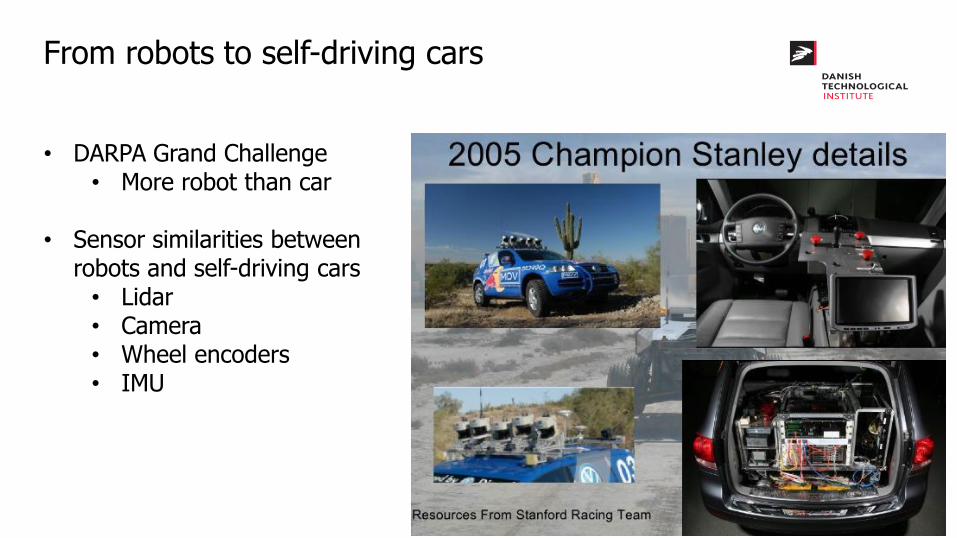
From robots to self-driving cars

From robots to self-driving cars
• DARPA Grand Challenge • More robot than car
From robots to self-driving cars
• DARPA Grand Challenge • More robot than car
• Sensor similarities between robots and self-driving cars• Lidar• Camera• Wheel encoders• IMU

From robots to self-driving cars
• DARPA Grand Challenge • More robot than car
• Sensor similarities between robots and self-driving cars• Lidar• Camera• Wheel encoders• IMU
• Extra sensors:• GPS• Radar

From robots to self-driving cars: Shared problems

From robots to self-driving cars: Shared problems
• Sensor data processing

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization• Object detection and classification

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization• Object detection and classification
• Navigation and control

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization• Object detection and classification
• Navigation and control• Route planning & following

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization• Object detection and classification
• Navigation and control• Route planning & following• Obstacle avoidance

From robots to self-driving cars: Shared problems
• Sensor data processing• Localization• Object detection and classification
• Navigation and control• Route planning & following• Obstacle avoidance• Human-like behavior
• Prediction• Emulation

Self-driving cars: Google Car

Google Car: Sensor data

Cooperative Open Cyber-Physical Systems (CO-CPS)

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication
S1 S2

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication• Dynamic system definitions S1 S2

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication• Dynamic system definitions
• Emergent behaviorS1 S2

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication• Dynamic system definitions
• Emergent behavior• Unpredictable operating environment
S1 S2

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication• Dynamic system definitions
• Emergent behavior• Unpredictable operating environment• Multiple stakeholders
S1 S2

Cooperative Open Cyber-Physical Systems (CO-CPS)
• Wireless communication• Dynamic system definitions
• Emergent behavior• Unpredictable operating environment• Multiple stakeholders• Hard or impossible to certify CO-CPS
• Technology is ahead of the law
S1 S2