Kansei Analysis for Ubiquitous Robots Interacting with People in Dynamic Environments.
28
Kansei Analysis for Ubiquitous Ro Kansei Analysis for Ubiquitous Ro bots Interacting with People in D bots Interacting with People in D ynamic Environments ynamic Environments
-
Upload
andrew-townsend -
Category
Documents
-
view
217 -
download
0
Transcript of Kansei Analysis for Ubiquitous Robots Interacting with People in Dynamic Environments.

Kansei Analysis for Ubiquitous Robots InteraKansei Analysis for Ubiquitous Robots Interacting with People in Dynamic Environments cting with People in Dynamic Environments
ContentsContents IntroductionIntroduction Human BehaviorHuman Behavior Personal SpacePersonal Space New systemNew system Future aspectsFuture aspects ConstructionConstruction SummarySummary

IntroductionMobile robots, Autonomous robots, Android r
obots
Humanoid Robots (Human LIKE robot???)
Features:
• Interaction with Humans
• Imitate human actions

Requirements
• Human like appearance
• Human like behavior
• Human like feelings

Moving Around People
• Moving around
• Interactions with humans
• Form in queues

Queuing
• Forming a line of people

What to Consider
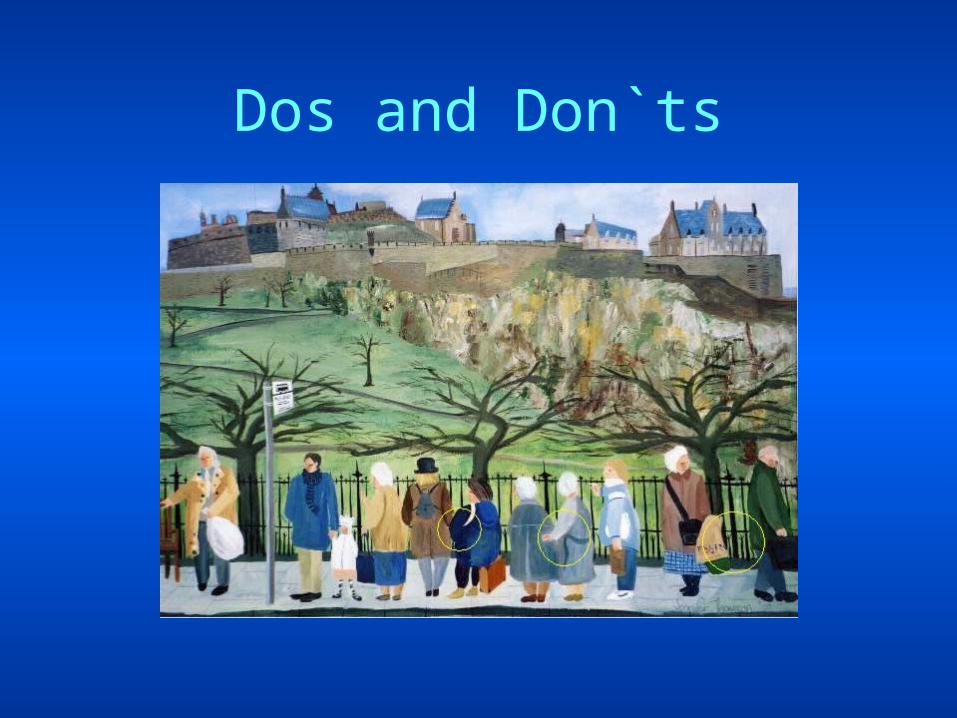
Dos and Don`ts

Line Modeling
??Too close
Too away

Perfect Line
• Appropriate Spacing

Nakauchi Model
• Nakauchi Model of a Human

Personal Space
• Nakauchi Model of personal space when people are forming a line
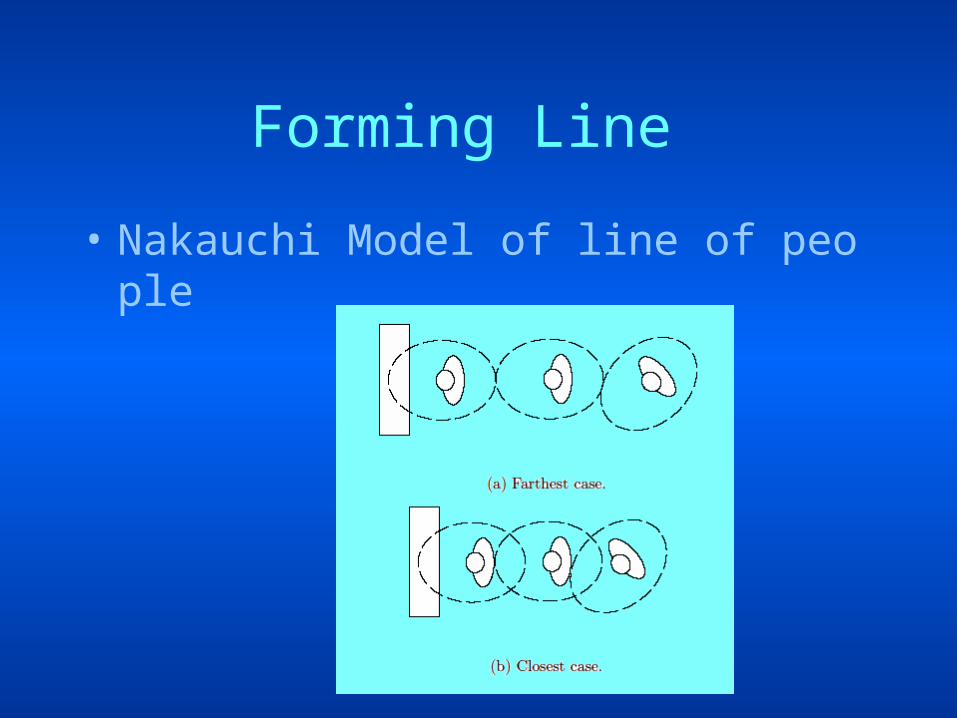
Forming Line
• Nakauchi Model of line of people

Simplified Version
HumanFront Side
Personal Space Generalized Circular Shape
80 cm 20 cm
30 cm
•Average distances with reference to generalized
circular diameter of a human

Generalization
• Considered as a percentage of 177.8% in front, 44.4% behind and 66.7% in sides as the following proportion yields.
(a_dist. / g.c.d.) X 100%

Application
TargetObstacle
Tracker Personal Space

Other Factors
• Shape
• Size
• Colour
• SoundOhh!

Relationships• Size and Distance
– Distance = K1 + K2 Size
• Shape and Distance– Distance = K3 + K4 Shape
Size / Shape
Distance

Moving Around• Safe distance (sd) and
• Personal distance (pd) (personal space)
Obstacle
HumanB
HumanA
sdgcd
2gcdRobot R
T =0
pd
Robot RT = t

Show Feelings
• Eyes and Mouth
Happy Unhappy
Blue / Green Yellow / Red
Distance
Distance Change
Feelings
MouthIndication
Eye Colour
Happy Unhappy
Experimental Setup

Measure for Personal Space
0 2 4 6 8 10 12 14 16 18 2040
60
80
100
120
140
160
Number of subjects
Dis
tanc
e to
the
robo
t [cm
]
Average distance

Indication of Feelings
Face Fine
Happy Sad

Fuzzy System
Fuzzyinference system
Fuzzyinference system
DistanceDistance
Rate of changeRate of changeFeelingFeeling

One Output
1
2
3
4
5
6
7
0 1 -1 1
0 1
Distance= 0.372
Rate of Change= 0.136
Feeling= 0.454

Some Considerations
• Making voice messages
• Object identification and response
Shuu...
Wow

Human interaction
• Recognition of– Voice– Gesture
Human Robot

Summary• Social rules• Human feelings identification
– Personal space
• Show some feelings– Eye colour– Mouth shape
• More analysis into personal space– Shape– Colour
• Using voice• Identify gestures• More friendly human interaction
In the future: