
Isabella Mastroeni - Profs Area Scienze ed...
70
D ERIVING B ISIMULATIONS BY S IMPLIFYING PARTITIONS Isabella Mastroeni VMCAI 2008 Deriving Bisimulations by Simplifying Partitions – p.1/15
Transcript of Isabella Mastroeni - Profs Area Scienze ed...

DERIVING BISIMULATIONS BY SIMPLIFYING
PARTITIONS
Isabella Mastroeni
VMCAI 2008
Deriving Bisimulations by Simplifying Partitions – p.1/15

INTRODUCTION
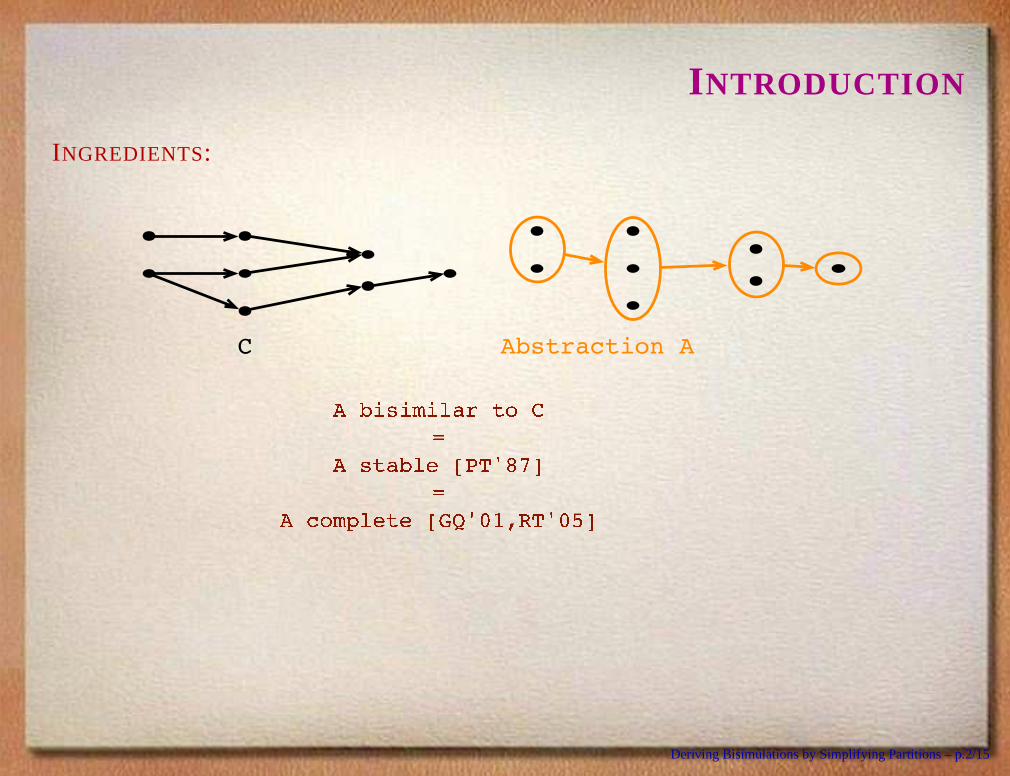
INGREDIENTS:
BISIMULATION : ... compares systems also on their capabilityof simulating each others.
Deriving Bisimulations by Simplifying Partitions – p.2/15

INTRODUCTION
INGREDIENTS:
BISIMULATION : ... compares systems also on their capabilityof simulating each others.
STABILITY : ... requires a bisimulation between a system andone of its abstractions (partitions of states).
Deriving Bisimulations by Simplifying Partitions – p.2/15

INTRODUCTION
INGREDIENTS:
BISIMULATION : ... compares systems also on their capabilityof simulating each others.
STABILITY : ... requires a bisimulation between a system andone of its abstractions (partitions of states).
COMPLETENESS: ... models the precision of an abstract domainwrt an operator.
Deriving Bisimulations by Simplifying Partitions – p.2/15

INTRODUCTION
INGREDIENTS:
A n o t b is im il a r t o C=A n o t s t a bl e [ P T '8 7]=A n o t c om pl e t e [ G Q '0 1, R T '0 5]
Deriving Bisimulations by Simplifying Partitions – p.2/15

INTRODUCTION
INGREDIENTS:
A b is im il a r to C=A s t a bl e [ P T '8 7]=A c o m pl e t e [ G Q '0 1, R T '0 5]
Deriving Bisimulations by Simplifying Partitions – p.2/15
INTRODUCTION
INGREDIENTS:
A b is im il a r to C=A s t a bl e [ P T '8 7]=A c o m pl e t e [ G Q '0 1, R T '0 5]
Deriving Bisimulations by Simplifying Partitions – p.2/15

ABSTRACT INTERPRETATION
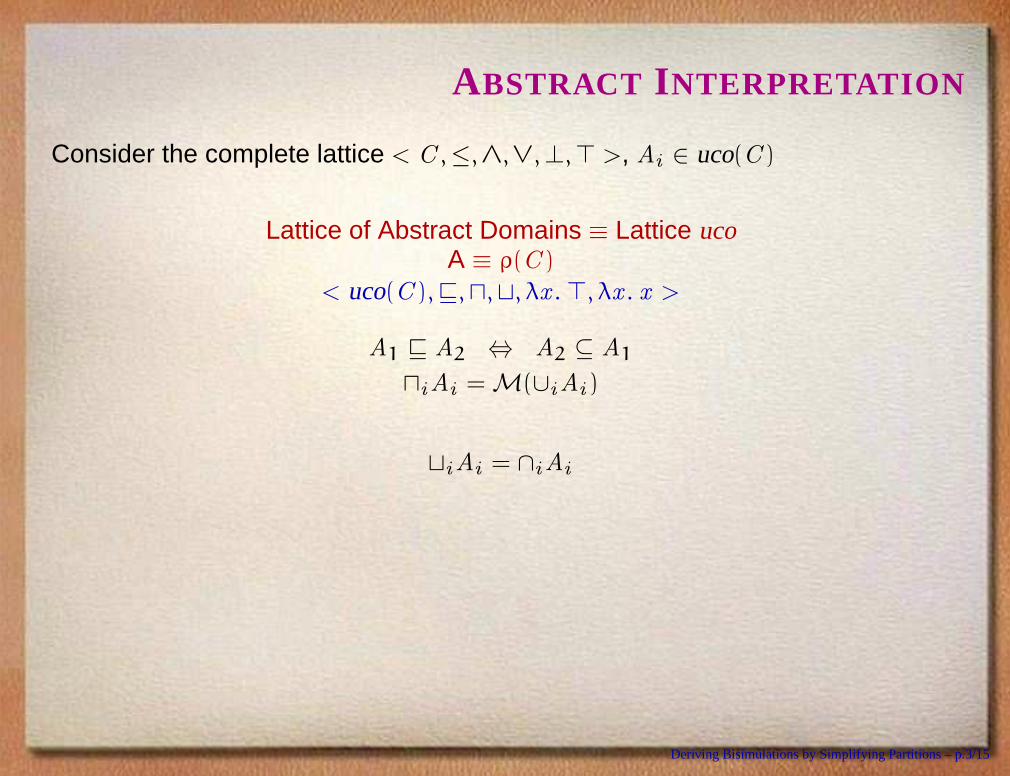
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
Deriving Bisimulations by Simplifying Partitions – p.3/15

ABSTRACT INTERPRETATION
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
A1 ⊑ A2 ⇔ A2 ⊆ A1
Deriving Bisimulations by Simplifying Partitions – p.3/15

ABSTRACT INTERPRETATION
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
A1 ⊑ A2 ⇔ A2 ⊆ A1
⊓iAi = M(∪iAi )
Deriving Bisimulations by Simplifying Partitions – p.3/15
ABSTRACT INTERPRETATION
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
A1 ⊑ A2 ⇔ A2 ⊆ A1
⊓iAi = M(∪iAi )
⊔iAi = ∩iAi
Deriving Bisimulations by Simplifying Partitions – p.3/15

ABSTRACT INTERPRETATION
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
A1 ⊑ A2 ⇔ A2 ⊆ A1
⊓iAi = M(∪iAi )
⊔iAi = ∩iAi
x
C
Top:
A
Deriving Bisimulations by Simplifying Partitions – p.3/15

ABSTRACT INTERPRETATION
Consider the complete lattice < C ,≤, ∧, ∨,⊥,⊤ >, Ai ∈ uco(C )
Lattice of Abstract Domains ≡ Lattice ucoA ≡ ρ(C )
< uco(C ),⊑,⊓,⊔, λx . ⊤, λx . x >
A1 ⊑ A2 ⇔ A2 ⊆ A1
⊓iAi = M(∪iAi )
⊔iAi = ∩iAi
x
C
Top:
x
C A
x
Bottom:
A
Deriving Bisimulations by Simplifying Partitions – p.3/15

PARTITIONS VS ABSTRACT DOMAINS
Partitions uniquely correspond to particular abstract domains: PARTITIONING
[RT’04,HM’05]
Deriving Bisimulations by Simplifying Partitions – p.4/15

PARTITIONS VS ABSTRACT DOMAINS
Partitions uniquely correspond to particular abstract domains: PARTITIONING
[RT’04,HM’05]
η ∈ uco(℘(C )) ⇒ ∀x , y . x Relη y iff η(x ) = η(y)
O
1 2 3 4
1234
123
Deriving Bisimulations by Simplifying Partitions – p.4/15

PARTITIONS VS ABSTRACT DOMAINS
Partitions uniquely correspond to particular abstract domains: PARTITIONING
[RT’04,HM’05]
η ∈ uco(℘(C )) ⇒ ∀x , y . x Relη y iff η(x ) = η(y)
O
1 2 3 4
23
14
1234
123 234
Deriving Bisimulations by Simplifying Partitions – p.4/15

PARTITIONS VS ABSTRACT DOMAINS
Partitions uniquely correspond to particular abstract domains: PARTITIONING
[RT’04,HM’05]
η ∈ uco(℘(C )) ⇒ ∀x , y . x Relη y iff η(x ) = η(y)
R ∈ Eq(C ) ⇒ CloR(X )def=
S
x∈X [x ]R
O
1 2 3 4
23
14
1234
123 234
Deriving Bisimulations by Simplifying Partitions – p.4/15

PARTITIONS VS ABSTRACT DOMAINS
Partitions uniquely correspond to particular abstract domains: PARTITIONING
[RT’04,HM’05]
η ∈ uco(℘(C )) ⇒ ∀x , y . x Relη y iff η(x ) = η(y)
R ∈ Eq(C ) ⇒ CloR(X )def=
S
x∈X [x ]R
Π(η)def= CloRelη ⊑ η
Deriving Bisimulations by Simplifying Partitions – p.4/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρη
BACKWARD COMPLETENESS: η◦f ◦ρ = η◦f
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρη
BACKWARD IN -COMPLETENESS: η◦f ◦ρ ≥ η◦f
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρη
Making BACKWARD COMPLETE: Refining input domains [GRS’00]
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρη
Making BACKWARD COMPLETE: Simplifying output domains [GRS’00]
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρ
η
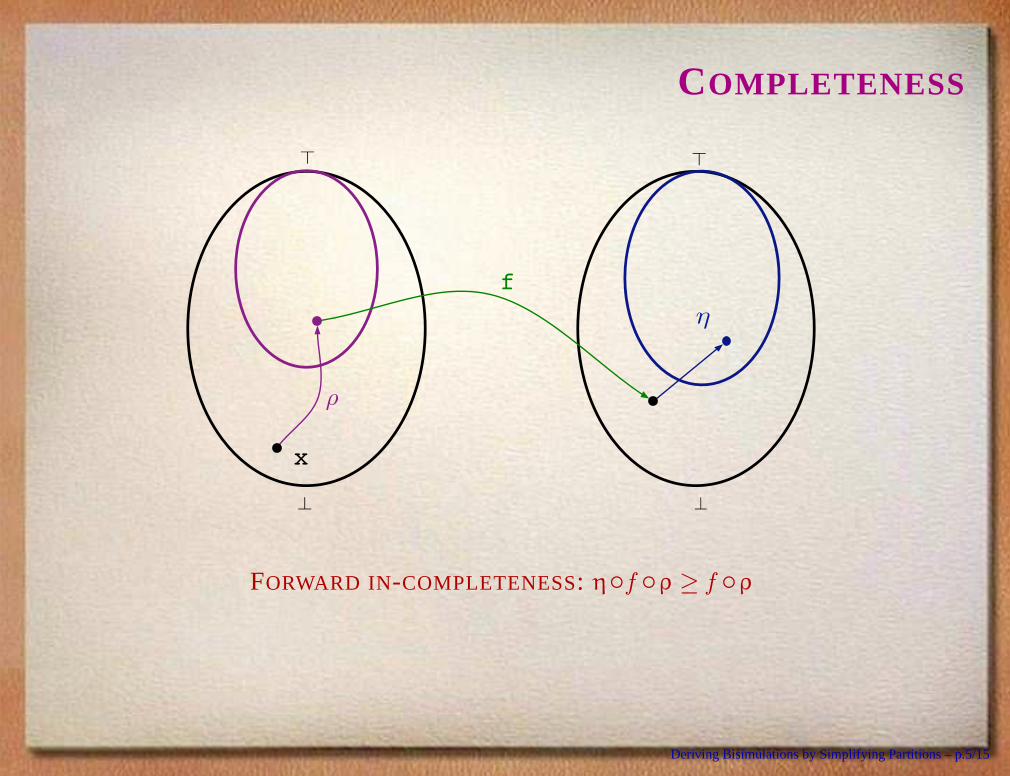
FORWARD COMPLETENESS: η◦f ◦ρ = f ◦ρ
Deriving Bisimulations by Simplifying Partitions – p.5/15
COMPLETENESS
⊤ ⊤
⊥ ⊥
ρ
η
FORWARD IN-COMPLETENESS: η◦f ◦ρ ≥ f ◦ρ
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρ
η
Making FORWARD COMPLETE: Refining output domains [GQ’01]
Deriving Bisimulations by Simplifying Partitions – p.5/15

COMPLETENESS
⊤ ⊤
⊥ ⊥
ρ
η
Making FORWARD COMPLETE: Simplifying input domains [GQ’01]
Deriving Bisimulations by Simplifying Partitions – p.5/15

STABILITY
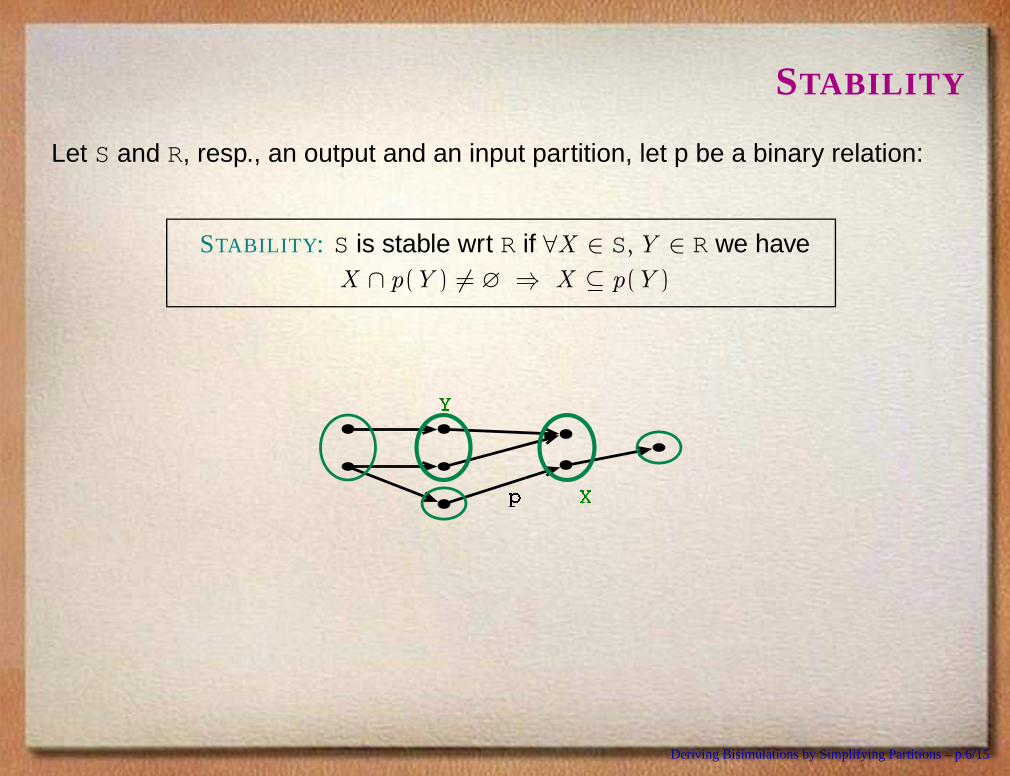
Let S and R, resp., an output and an input partition, let p be a binary relation:
STABILITY : S is stable wrt R if ∀X ∈ S, Y ∈ R we haveX ∩ p(Y ) 6= ∅ ⇒ X ⊆ p(Y )
Deriving Bisimulations by Simplifying Partitions – p.6/15
STABILITY
Let S and R, resp., an output and an input partition, let p be a binary relation:
STABILITY : S is stable wrt R if ∀X ∈ S, Y ∈ R we haveX ∩ p(Y ) 6= ∅ ⇒ X ⊆ p(Y )
pY
X
Deriving Bisimulations by Simplifying Partitions – p.6/15

STABILITY
Let S and R, resp., an output and an input partition, let p be a binary relation:
STABILITY : S is stable wrt R if ∀X ∈ S, Y ∈ R we haveX ∩ p(Y ) 6= ∅ ⇒ X ⊆ p(Y )
pY
Deriving Bisimulations by Simplifying Partitions – p.6/15

MAIN CONTRIBUTION
WHAT ALREADY EXISTS:
A correspondence between stability and forward completeness[RANZATO & TAPPARO ’05];
A refinement algorithm for partition stability [PAIGE & TARJAN’87];
A refinement transformer for abstract domain completeness[GIACOBAZZI ET AL .’00, GIACOBAZZI & QUINTARELLI ’01];
A simplification transformer for abstract domain completeness[GIACOBAZZI ET AL .’00, GIACOBAZZI & QUINTARELLI ’01];;
Deriving Bisimulations by Simplifying Partitions – p.7/15

MAIN CONTRIBUTION
WHAT DOES NOT EXIST:
A characterization of completeness for partitions;
A notion of partition stability/completeness for the backward direction;
A simplification algorithm for partition stability
Deriving Bisimulations by Simplifying Partitions – p.7/15
STABILITY VS FORWARD COMPLETENESS
F-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ X ⊆ f (Y ) [PT’87,RT’05]
Deriving Bisimulations by Simplifying Partitions – p.8/15
STABILITY VS FORWARD COMPLETENESS
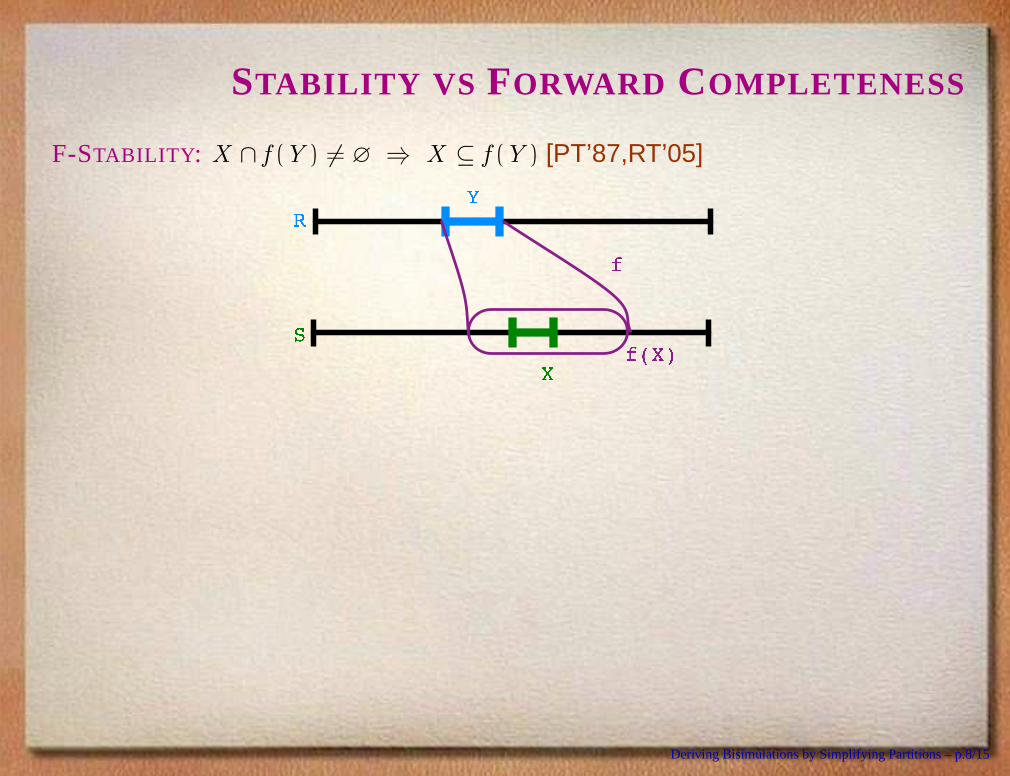
F-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ X ⊆ f (Y ) [PT’87,RT’05]
f
SR Y
X f ( X )
Deriving Bisimulations by Simplifying Partitions – p.8/15

STABILITY VS FORWARD COMPLETENESS
F-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ X ⊆ f (Y ) [PT’87,RT’05]
f
SR Y
X f ( X )
Deriving Bisimulations by Simplifying Partitions – p.8/15

STABILITY VS FORWARD COMPLETENESS
F-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ X ⊆ f (Y ) [PT’87,RT’05]
f
SR Y
X f ( X )F-COMPLETENESS: [f ([x ]R)]S = f ([x ]R)
Deriving Bisimulations by Simplifying Partitions – p.8/15
STABILITY VS FORWARD COMPLETENESS
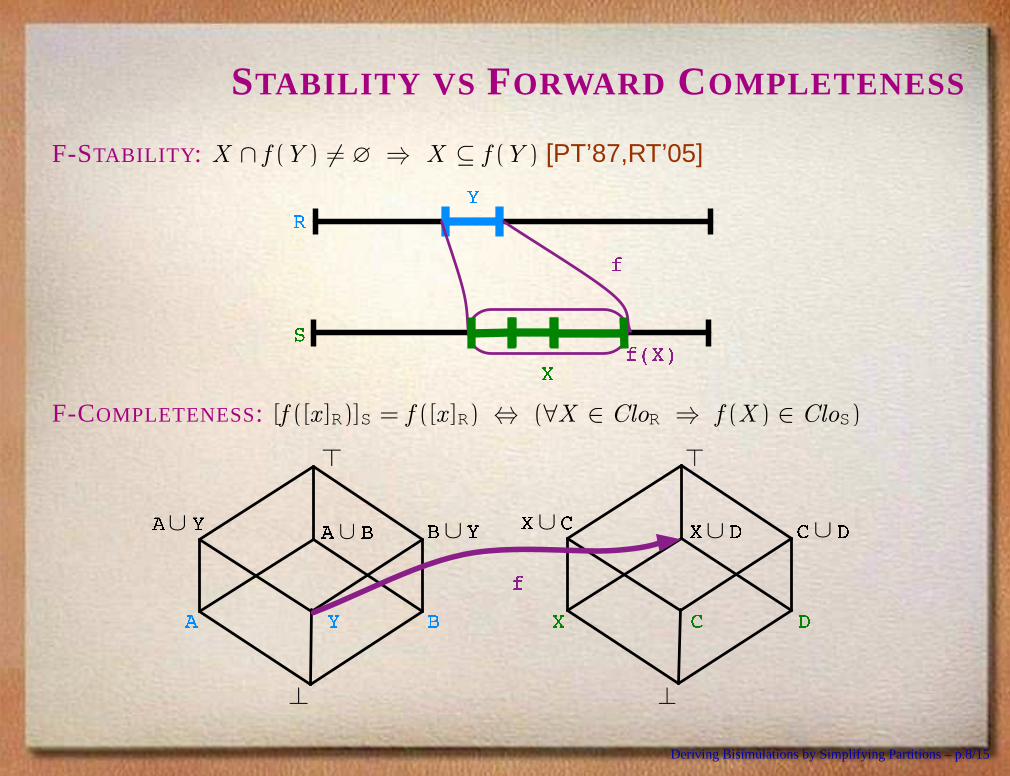
F-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ X ⊆ f (Y ) [PT’87,RT’05]
f
SR Y
X f ( X )F-COMPLETENESS: [f ([x ]R)]S = f ([x ]R) ⇔ (∀X ∈ CloR ⇒ f (X ) ∈ CloS)
⊥
⊤
A Y B
A Y
∪ A B∪
B Y∪
⊥
⊤X C D
X C∪ X D
∪
C D
∪f
Deriving Bisimulations by Simplifying Partitions – p.8/15

STABILITY VS BACKWARD COMPLETENESS
B-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ f (Y ) ⊆ X
Deriving Bisimulations by Simplifying Partitions – p.9/15

STABILITY VS BACKWARD COMPLETENESS
B-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ f (Y ) ⊆ X
fSR Y
X f ( Y )
Deriving Bisimulations by Simplifying Partitions – p.9/15

STABILITY VS BACKWARD COMPLETENESS
B-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ f (Y ) ⊆ X
fSR Y
X
{ Y | f ( Y ) X }⊆Deriving Bisimulations by Simplifying Partitions – p.9/15

STABILITY VS BACKWARD COMPLETENESS
B-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ f (Y ) ⊆ X
fSR Y
X
{ Y | f ( Y ) X }⊆B-COMPLETENESS:[f ([x ]R)]S = [f (x )]S
Deriving Bisimulations by Simplifying Partitions – p.9/15

STABILITY VS BACKWARD COMPLETENESS
B-STABILITY : X ∩ f (Y ) 6= ∅ ⇒ f (Y ) ⊆ X
fSR Y
X
{ Y | f ( Y ) X }⊆B-COMPLETENESS:[f ([x ]R)]S = [f (x )]S ⇔ (∀X ∈ CloS ⇒ max
{Y
˛
˛
˛ f (Y ) ⊆ X}∈ CloR)
⊥
⊤
A Y B
A Y
∪ A B∪
B Y∪
⊥
⊤
X C D
X C∪ X D
∪
C D
∪f
Deriving Bisimulations by Simplifying Partitions – p.9/15

BACKWARD VS FORWARD
A domain is backward complete wrt f iff it is forward complete wrt
f + = λX .S
{Y
˛
˛
˛ f (Y ) ⊆ X}
;
A (not trivial) partition is backward stable wrt f iff it is forward stable wrt
f −1 = λX .{
y˛
˛
˛ f (y) ∈ X}
;
If f is injective, a (not trivial) partition is forward stable wrt f iff it isbackward stable wrt f −1;
Deriving Bisimulations by Simplifying Partitions – p.10/15

BACKWARD VS FORWARD
A domain is backward complete wrt f iff it is forward complete wrt
f + = λX .S
{Y
˛
˛
˛ f (Y ) ⊆ X}
;
A (not trivial) partition is backward stable wrt f iff it is forward stable wrt
f −1 = λX .{
y˛
˛
˛ f (y) ∈ X}
;
If f is injective, a (not trivial) partition is forward stable wrt f iff it isbackward stable wrt f −1;
A backward problem can always be transformed in a forward one,but the viceversa is not always possible!
Deriving Bisimulations by Simplifying Partitions – p.10/15

REFINING FOR STABILITY: PT GENERALIZED
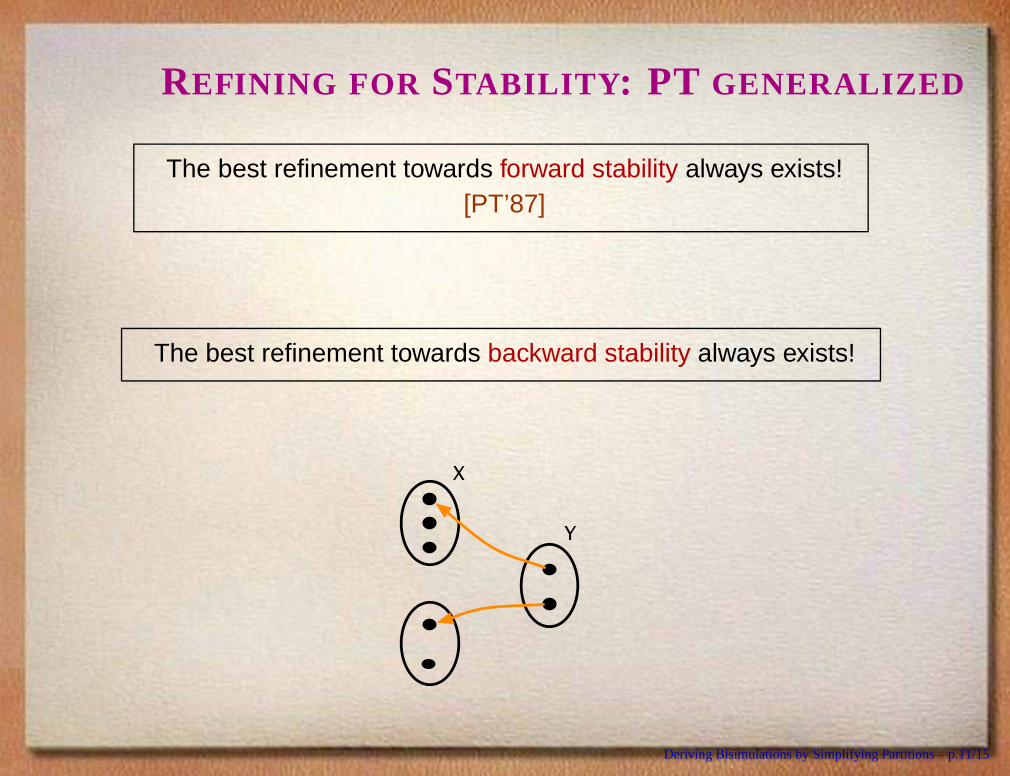
The best refinement towards forward stability always exists![PT’87]
Deriving Bisimulations by Simplifying Partitions – p.11/15

REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
Deriving Bisimulations by Simplifying Partitions – p.11/15

REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
Deriving Bisimulations by Simplifying Partitions – p.11/15

REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
P : Partition
PTSplitf (S ,P) :
{Partition obtained from P by replacingeach block B ∈ P with B ∩ f (S) and B r f (S)
PTRefinersf (P)def=
{S
˛
˛
˛ P 6= PTSplitf (S ,P) ∧ ∃{Bi }i ⊆ P. S =S
i Bi
}
PT-Algorithmf :
while (P is not stable) dochoose S ∈ PTRefinersf (P);
P := PTSplitf (S ,P);
endwhile
[RT’05]
Deriving Bisimulations by Simplifying Partitions – p.11/15
REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
The best refinement towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.11/15
REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
The best refinement towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.11/15

REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
The best refinement towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.11/15

REFINING FOR STABILITY: PT GENERALIZED
The best refinement towards forward stability always exists![PT’87]
The best refinement towards backward stability always exists!
⇓We can use the PT algorithm since a backward problem wrt f corresponds
always to a forward problem wrt f −1.
Deriving Bisimulations by Simplifying Partitions – p.11/15

SIMPLIFYING FOR STABILITY
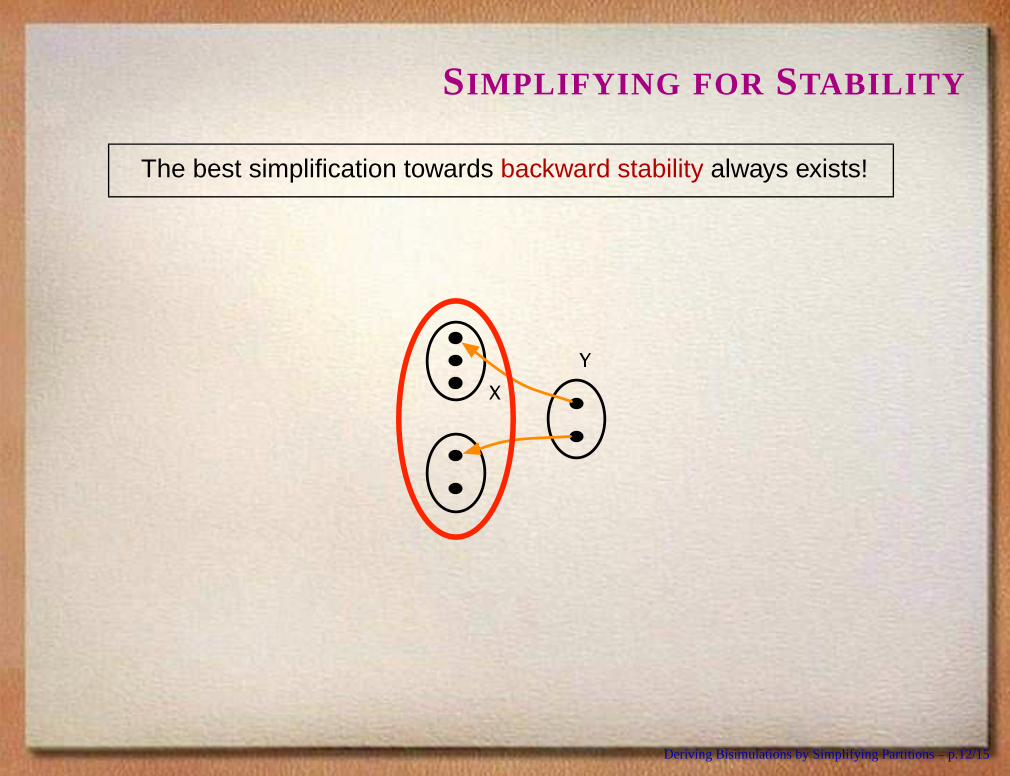
The best simplification towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.12/15
SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
PTSimplifiersf (S)def=
{X
˛
˛
˛ X ∩ f (S) 6= ∅
}
PTMergef (S ,P) :
Partition obtained from P by replacingall the blocks X ∈ PTSimplifiersf (S) withS
PTSimplifiersf (S)
DPT-Algorithmf :
while (P is not stable) dochoose S ∈ PTSimplifiersf (P);
P := PTMergef (S ,P));
endwhile
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
The best simplification towards forward stability DOES NOTalways exist!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
The best simplification towards forward stability DOES NOTalways exist!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
The best simplification towards forward stability DOES NOTalways exist!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
The best simplification towards forward stability DOES NOTalways exist!
Deriving Bisimulations by Simplifying Partitions – p.12/15

SIMPLIFYING FOR STABILITY
The best simplification towards backward stability always exists!
The best simplification towards forward stability DOES NOTalways exist!
EXAMPLE :Consider f (x ) = 2x . ⊤ is not stable (f (⊤) = even ⊂ ⊤).Consider R = {even, odd } (Parity partition), then
even ∩ f (odd) 6= ∅ since 6 ∈ f (3) andeven 6⊆ f (odd) since 4 /∈ f (odd)
⇒ A forward stable simplification does not exist!
Deriving Bisimulations by Simplifying Partitions – p.12/15

STABILITY IN ABSTRACT NON INTERFERENCE
ABSTRACT NON INTERFERENCE: [GM’04]Fixed an observation of public input, the variation of
private input has not to interfere with the observation of the public output.
⇓∀l1, l2 ∈ V
L, h1, h2 ∈ VH. η(l1) = η(l2) ⇒ ρ(JPK(h1, l1)L) = ρ(JPK(h2, l2)L)
Deriving Bisimulations by Simplifying Partitions – p.13/15

STABILITY IN ABSTRACT NON INTERFERENCE
ABSTRACT NON INTERFERENCE: [GM’04]Fixed an observation of public input, the variation of
private input has not to interfere with the observation of the public output.
⇓∀l1, l2 ∈ V
L, h1, h2 ∈ VH. η(l1) = η(l2) ⇒ ρ(JPK(h1, l1)L) = ρ(JPK(h2, l2)L)
Let Υ(η(l)) denote the sets of value that has to be indistinguishable by amalicious attacker observing η in input (Υ(η(l)) = JPK(VH, η(l))L).
Deriving Bisimulations by Simplifying Partitions – p.13/15

STABILITY IN ABSTRACT NON INTERFERENCE
ABSTRACT NON INTERFERENCE: [GM’04]Fixed an observation of public input, the variation of
private input has not to interfere with the observation of the public output.
⇓∀l1, l2 ∈ V
L, h1, h2 ∈ VH. η(l1) = η(l2) ⇒ ρ(JPK(h1, l1)L) = ρ(JPK(h2, l2)L)
Let Υ(η(l)) denote the sets of value that has to be indistinguishable by amalicious attacker observing η in input (Υ(η(l)) = JPK(VH, η(l))L).
Υ(L1)Υ(L2)
Deriving Bisimulations by Simplifying Partitions – p.13/15

STABILITY IN ABSTRACT NON INTERFERENCE
ABSTRACT NON INTERFERENCE: [GM’04]Fixed an observation of public input, the variation of
private input has not to interfere with the observation of the public output.
⇓∀l1, l2 ∈ V
L, h1, h2 ∈ VH. η(l1) = η(l2) ⇒ ρ(JPK(h1, l1)L) = ρ(JPK(h2, l2)L)
Let Υ(η(l)) denote the sets of value that has to be indistinguishable by amalicious attacker observing η in input (Υ(η(l)) = JPK(VH, η(l))L).
Υ(L1)Υ(L2)
Y ∩ Υ(L1) "= ∅ and Υ(L1) "⊆ Y
Deriving Bisimulations by Simplifying Partitions – p.13/15

STABILITY IN ABSTRACT NON INTERFERENCE
ABSTRACT NON INTERFERENCE: [GM’04]Fixed an observation of public input, the variation of
private input has not to interfere with the observation of the public output.
⇓∀l1, l2 ∈ V
L, h1, h2 ∈ VH. η(l1) = η(l2) ⇒ ρ(JPK(h1, l1)L) = ρ(JPK(h2, l2)L)
Let Υ(η(l)) denote the sets of value that has to be indistinguishable by amalicious attacker observing η in input (Υ(η(l)) = JPK(VH, η(l))L).
THEOREM: The domain{
X˛
˛
˛ X is backward stable wrt Υ}
is the strongest
harmless attacker for deterministic systems.
Deriving Bisimulations by Simplifying Partitions – p.13/15

STABILITY FOR OPACITY
OPAQUE PREDICATE: A predicate φ over the semantics of a system,is opaque wrt the observation function obs if, for every execution t1
satisfying φ there is an execution t2 which does not satisfy φ,such that obs(t1) =obs(t2). [Bryans et al. ’05]
Deriving Bisimulations by Simplifying Partitions – p.14/15

STABILITY FOR OPACITY
OPAQUE PREDICATE: A predicate φ over the semantics of a system,is opaque wrt the observation function obs if, for every execution t1
satisfying φ there is an execution t2 which does not satisfy φ,such that obs(t1) =obs(t2). [Bryans et al. ’05]
⇓∀t . obs(t) ∩ φ 6= ∅ and obs(t) 6⊆ φ
(φ NOT backward stable wrt obs)
Deriving Bisimulations by Simplifying Partitions – p.14/15

STABILITY FOR OPACITY
OPAQUE PREDICATE: A predicate φ over the semantics of a system,is opaque wrt the observation function obs if, for every execution t1
satisfying φ there is an execution t2 which does not satisfy φ,such that obs(t1) =obs(t2). [Bryans et al. ’05]
⇓∀t . obs(t) ∩ φ 6= ∅ and obs(t) 6⊆ φ
(φ NOT backward stable wrt obs)
EXAMPLE :φ = 3|(x3 − x ), attacker capability α = {Z, 3Z, Z r 3Z, ∅}
⇒ If the attacker can observe the predicate as the bca of all the functioncomposing φ then obs(2) ∩ φ = Z ∩ φ 6= ∅, while obs(2) 6⊆ φ.
Deriving Bisimulations by Simplifying Partitions – p.14/15

STABILITY FOR OPACITY
OPAQUE PREDICATE: A predicate φ over the semantics of a system,is opaque wrt the observation function obs if, for every execution t1
satisfying φ there is an execution t2 which does not satisfy φ,such that obs(t1) =obs(t2). [Bryans et al. ’05]
⇓∀t . obs(t) ∩ φ 6= ∅ and obs(t) 6⊆ φ
(φ NOT backward stable wrt obs)
⇒ Completeness can be exploited for certifying the resilience of opaquepredicates to reverse engineering;
⇒ Opacity provides new expectations in seeking domain transformersincreasing incompleteness,
Deriving Bisimulations by Simplifying Partitions – p.14/15

DISCUSSION
We extend the existing notion of stability (corresponding to forwardcompleteness for partitions) also to the backward direction;
We dualize the existing refinement algorithm for stability in order tosimplify partitions;
The simplification algorithm can be considered for simplifying abstractmodels in abstract model checking;
We show fields of computer science where the new stability notionmodels existing concepts:¬
The strongest harmless attacker in abstract non-interference[Giacobazzi & Mastroeni ’04, Hunt & Mastroeni ’05]
Opacity for abstract observations of programs
Deriving Bisimulations by Simplifying Partitions – p.15/15


















