
Lateral Forehead Flap: A Reliable Flap in Difficult Conditions

Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power
of a PA-28-161 Piper Warrior
By
Tjimon Meric Louisy
A thesis submitted to the College of Engineering and Science of
Florida Institute of Technology
In partial fulfillment of the requirements
For the degree of
Master of Science
in
Flight Test Engineering
Melbourne, Florida
December 2019

We the undersigned committee hereby approve the attached thesis, “Investigating the
Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161
Piper Warrior”, by Tjimon Meric Louisy.
_________________________________________________
Brian A. Kish, Ph.D.
Assistant Professor
Aerospace, Physics and Space Sciences
Major Advisor
_________________________________________________
Isaac Silver, Ph.D.
Associate Professor
College of Aeronautics
_________________________________________________
Ralph Kimberlin, Dr. Ing
Professor
Aerospace, Physics and Space Sciences
_________________________________________________
Daniel Batcheldor
Professor and Department Head
Aerospace, Physics and Space Sciences

iii
Abstract
Investigating the Effects of Altitude and Flap Configuration on the
Specific Excess Power of a PA-28-161 Piper Warrior
Tjimon Meric Louisy
Advisor: Brian A. Kish, Ph.D.
The high number of General Aviation (GA) accidents attributed to Loss of Control
suggests that GA pilots are lacking low speed awareness and are unable to
appropriately recognize when the aircraft is in a low energy state. There is, therefore,
an urgent need for the development of an energy management system which is
applicable to GA aircraft that can alert the pilot in situations of low energy conditions
and recommends to the pilot the appropriate corrective action to restore conditions to
a safe energy state. This will require the development of an algorithm that governs this
energy management system that considers a comprehensive understanding of the
performance capabilities of GA aircraft, particularly the ability of the aircraft to
progress from one energy state to another. Given that low energy conditions are the
primary concern, the aircraft’s ability to progress from a low energy state to a higher
energy state, or the aircraft’s specific excess power (Ps), will be the parameter of most
interest.
The focus of this research study was the testing of a PA-28-161 Piper Warrior to
develop an understanding of the effects of altitude and flap configuration on the ability
of the aircraft to change its energy state. Level accelerations and level decelerations

iv
were performed and used to determine the Ps for the aircraft at various altitudes and
configurations. The objectives of the test program were to generate Ps curves for each
altitude and configuration, compare the curves obtained, and determine trends that
could help model the Ps of the aircraft under any operating conditions.
The results of the test program showed that there was an inverse relationship between
specific excess power and altitude for both the clean-flap and full flaps configurations.
The best climb speed for the aircraft was approximately 79 KIAS in the clean
configuration and 62 KIAS in the full flaps configuration. Furthermore, extending the
flaps resulted in a significant decrease in the maximum specific excess power of the
aircraft, with the maximum specific excess power in the full flaps configuration being
approximately 200 ft/min less than the maximum specific excess power in the clean
configuration for all altitudes investigated. The best glide speed was observed to be 75
KIAS in the clean configuration.
The data collected and trends observed will be valuable in the development of an
algorithm for a GA energy management system. Further investigation into the Ps with
the flaps deployed and comparison between the trends observed on the PA-28-161
with other common GA aircraft parameters will also be required.

v
Table of Contents Abstract .............................................................................................................................. iii
Table of Contents ................................................................................................................. v
List of Figures ..................................................................................................................... vii
List of Tables ....................................................................................................................... xi
List of Abbreviations and Symbols ...................................................................................... xii
Acknowledgements........................................................................................................... xiv
Dedication ........................................................................................................................ xvi
Section 1 Introduction......................................................................................................... 1
Section 2 Test Methods and Materials ...............................................................................14
2.1 Test Aircraft .............................................................................................................14
2.2 Instrumentation .......................................................................................................15
2.3 Flight Log ..................................................................................................................16
2.4 Flight Test Locations and Crew .................................................................................17
Section 3 Data Reduction Methods ....................................................................................18
3.1 Data Requirements...................................................................................................18
3.2 Test Procedures........................................................................................................19
3.3 Data Reduction.........................................................................................................21
Section 4 Results ................................................................................................................32
4.1 Ps Plots (𝒂𝒔𝒔𝒖𝒎𝒆 𝒅𝒉/𝒅𝒕 = 𝟎) .................................................................................32

vi
4.1.1 Steady-Level Accelerations ................................................................................32
4.1.2 Steady-Level Decelerations ................................................................................51
4.2 Comparison to POH ..................................................................................................58
4.3 Ps Plots (𝒅𝒉/𝒅𝒕) component included ......................................................................59
4.3.1 Steady-Level Accelerations ................................................................................60
4.3.2 Steady-Level Decelerations ................................................................................64
Section 5 Conclusions and Future Work .............................................................................68
5.1 Conclusions ..............................................................................................................68
5.2 Recommendations and Future Works .......................................................................73
References .........................................................................................................................76
Appendix A: Flight Test Data ..............................................................................................78
Appendix B: Supplementary Graphs ...................................................................................98

vii
List of Figures
Figure 1: Loss of control in flight accidents and fatalities in GA 2011-2015 [2] ..................... 2
Figure 2 Fatal accidents per aircraft upset event types 2011-2015 [2] ................................. 3
Figure 3: Altitude-velocity diagram showing lines of constant specific Energy (Es) [5] .......... 7
Figure 4: Sample Ps Curves and Resulting Constant Ps Contours [9] ....................................10
Figure 5: Specific Total and Modified Total Energy Error Rate during approach [10] ...........12
Figure 6 PA-28-161 Piper Warrior – N618FT .......................................................................14
Figure 7: Test Locations [12] ..............................................................................................17
Figure 8: CAS vs Time (First 15s) .........................................................................................23
Figure 9: CAS vs Time (16s Onwards) ..................................................................................24
Figure 10: Pressure Altitude vs Time ..................................................................................25
Figure 11: Modeling Pressure Altitude vs Time ...................................................................27
Figure 12: Ps vs CAS Level-Acceleration ..............................................................................30
Figure 13: Ps vs CAS Level-Acceleration (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ........................................................30
Figure 14: : Ps vs CAS Level-Deceleration ............................................................................31
Figure 15: Ps vs CAS for Clean Configuration Level-Accelerations ........................................32
Figure 16: : Ps vs CAS for Full Flaps Configuration Level-Accelerations ................................34
Figure 17: : Relationships between Ps and Altitude .............................................................35
Figure 18: Relationships between Vh and Altitude ..............................................................36
Figure 19: Relationships between Vy and Altitude ...............................................................37
Figure 20: Equation-derived Ps curves.................................................................................39

viii
Figure 21: Ps curves for Level-Accelerations at 1300 feet ....................................................41
Figure 22: Ps curves for Level-Accelerations at 3000 feet ....................................................42
Figure 23: Ps curves for Level-Accelerations at 5000 feet ....................................................43
Figure 24: Ps curves for Level-Accelerations at 7000 feet ....................................................44
Figure 25: Equation-derived Ps curves for Full Flaps Configuration......................................49
Figure 26: Ps Curves for Clean Configuration Level-Decelerations .......................................51
Figure 27: Ps Curves for Full Flaps Configuration Level-Decelerations .................................52
Figure 28: Ps Curves for Level-Decelerations at 1300 feet ...................................................53
Figure 29: Ps Curves for Level-Decelerations at 3000 feet ...................................................54
Figure 30: Ps Curves for Level-Decelerations at 5000 feet ...................................................55
Figure 31: Ps Curves for Level-Decelerations at 7000 feet ...................................................56
Figure 32: Ps Curves for Clean Configuration Level-Accelerations (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ..................60
Figure 33: Ps Curves for Full Flaps Configuration Level-Accelerations (𝒅𝒉𝒅𝒕 ≠ 𝟎) ..............61
Figure 34: Ps Curves for Level-Accelerations at 1300 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ..............................61
Figure 35: Ps Curves for Level-Accelerations at 3000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ..............................62
Figure 36: Ps Curves for Level-Accelerations at 5000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ..............................62
Figure 37: Ps Curves for Level-Accelerations at 7000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) ..............................63
Figure 38: Ps Curves for Clean Configuration Level-Decelerations (𝒅𝒉/𝒅𝒕 ≠ 𝟎) .................64
Figure 39: Ps Curves for Full Flaps Configuration Level-Decelerations (𝒅𝒉𝒅𝒕 ≠ 𝟎) ..............65
Figure 40: Ps Curves for Level-Decelerations at 1300 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) .............................65
Figure 41: Ps Curves for Level-Decelerations at 3000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) .............................66
Figure 42: Ps Curves for Level-Decelerations at 5000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) .............................66
Figure 43: Ps Curves for Level-Decelerations at 7000 feet (𝒅𝒉/𝒅𝒕 ≠ 𝟎) .............................67
ix
Figure 44: CAS vs Time 1300 feet Clean Level-Acceleration (First 15s) ................................78
Figure 45: CAS vs Time 1300 feet Clean Level-Acceleration (16s to end of run) ...................78
Figure 46: Pressure Altitude vs Time 1300 feet Clean Level-Acceleration ............................79
Figure 47: CAS vs Time 1300 feet Clean Level-Deceleration ................................................79
Figure 48: Pressure Altitude vs Time 1300 feet Clean Level-Deceleration ...........................80
Figure 49: CAS vs Time 1300 feet Full Flaps Level-Acceleration (First 20s)...........................80
Figure 50: CAS vs Time 1300 feet Full Flaps Level-Acceleration (21s to end of run) .............81
Figure 51: Pressure Altitude vs Time 1300 feet Full Flaps Level-Acceleration ......................81
Figure 52: CAS vs Time 1300 feet Full Flaps Level-Deceleration ..........................................82
Figure 53: Pressure Altitude vs Time 1300 feet Full Flaps Level-Deceleration......................82
Figure 54: CAS vs Time 3000 feet Clean Level-Acceleration (First 15s) ................................83
Figure 55: CAS vs Time 3000 feet Clean Level-Acceleration (16s to end of run) ...................83
Figure 56: Pressure Altitude vs Time 3000 feet Clean Level-Acceleration ............................84
Figure 57: CAS vs Time 3000 feet Clean Level-Deceleration ................................................84
Figure 58: Pressure Altitude vs Time 3000 feet Clean Level-Deceleration ...........................85
Figure 59: CAS vs Time 3000 feet Full Flaps Level-Acceleration (First 10s)...........................85
Figure 60: CAS vs Time 3000 feet Full Flaps Level-Acceleration (11s to end of run) .............86
Figure 61: Pressure Altitude vs Time 3000 feet Full Flaps Level-Acceleration ......................86
Figure 62: CAS vs Time 3000 feet Full Flaps Level-Deceleration ..........................................87
Figure 63: Pressure Altitude vs Time 3000 feet Full Flaps Level-Deceleration......................87
Figure 64: CAS vs Time 5000 feet Clean Level-Acceleration (First 15s) ................................88
Figure 65: CAS vs Time 5000 feet Clean Level-Acceleration (16s to end of run) ...................88
Figure 66: Pressure Altitude vs Time 5000 feet Clean Level-Acceleration ............................89

x
Figure 67: CAS vs Time 5000 feet Clean Level-Deceleration ................................................89
Figure 68: Pressure Altitude vs Time 5000 feet Clean Level-Deceleration ...........................90
Figure 69: CAS vs Time 5000 feet Full Flaps Level-Acceleration (First 10s)...........................90
Figure 70: CAS vs Time 5000 feet Full Flaps Level-Acceleration (11s to end of run) .............91
Figure 71: Pressure Altitude vs Time 5000 feet Full Flaps Level-Acceleration ......................91
Figure 72: CAS vs Time 5000 feet Full Flaps Level-Deceleration ..........................................92
Figure 73: Pressure Altitude vs Time 5000 feet Full Flaps Level-Deceleration......................92
Figure 74: CAS vs Time 7000 feet Clean Level-Acceleration (First 15s) ................................93
Figure 75: CAS vs Time 7000 feet Clean Level-Acceleration (16s to end of run) ...................93
Figure 76: Pressure Altitude vs Time 7000 feet Clean Level-Acceleration ............................94
Figure 77: CAS vs Time 7000 feet Clean Level-Deceleration ................................................94
Figure 78: Pressure Altitude vs Time 7000 feet Clean Level-Deceleration ...........................95
Figure 79: CAS vs Time 7000 feet Full Flaps Level-Acceleration (First 15s)...........................95
Figure 80: CAS vs Time 7000 feet Full Flaps Level-Acceleration (16s to end of run) .............96
Figure 81: Pressure Altitude vs Time 7000 feet Full Flaps Level-Acceleration ......................96
Figure 82; CAS vs Time 7000 feet Full Flaps Level-Deceleration ..........................................97
Figure 83: Pressure Altitude vs Time 7000 feet Full Flaps Level-Deceleration......................97
Figure 84: Change in Vy due to Flap Extension [13] .............................................................98
Figure 85: Altitude Effect on Vy [14] ...................................................................................99

xi
List of Tables
Table 1: Fatal LOC Accidents from 2011 to 2015 in GA and Commercial Operations [8] ....... 8
Table 2: Flight Log ..............................................................................................................16
Table 3: Values to Produce Aircraft Specific Excess Power Curve in Clean Configuration .....38
Table 4: Max Ps Comparison between Clean Configuration and Full Flaps Configuration .....45
Table 5: VH Comparison between Clean Configuration and Full Flaps Configuration ...........46
Table 6: Vy Comparison between Clean Configuration and Full Flaps Configuration ............46
Table 7: Values to Produce Aircraft Specific Excess Power Curve for Full Flaps ...................49
Table 8: Comparison between POH Values and Measured Values ......................................58

xii
List of Abbreviations and Symbols
AFM Airplane Flight Manual
ASEL Airplane Single Engine Land
CAS Calibrated Airspeed
CFIT Controlled Flight Into Terrain
CFR Code of Federal Regulations
EASA European Aviation Safety Agency
ESP Electronic Stability & Protection
Es Specific Energy
FAA Federal Aviation Administration
FTE Flight Test Engineer
GA General Aviation
HP Horsepower
Hp Pressure Altitude
IATA International Air Transportation Association
IAS Indicated Airspeed
KCAS Knots Calibrated Airspeed

xiii
KIAS Knots Indicated Airspeed
LOC Loss of Control
LOC-I Loss of Control In-flight
NTSB National Transport Safety Board
OAT Outside Air Temperature
POH Pilot’s Operating Handbook
Ps Specific Excess Power
TAS True Airspeed
ROC Rate of Climb
SD Secure Digital
USP Underspeed Protection
VH Maximum Level Flight Speed
VY Best Rate of Climb Airspeed

xiv
Acknowledgements
First, I would like to thank God for the endless blessings that He has bestowed upon
me throughout my life, and especially during my academic career. Without His
continued grace, none of my accomplishments, including this thesis, would have been
possible. I am also particularly grateful to my entire family for their prayers, advice
and encouragement throughout my academic career, especially during my pursuit of a
college education.
I would like to extend my sincerest thanks to my thesis advisor, Dr. Brian Kish, for his
continual support throughout my coursework and his excellent counsel towards the
completion of my thesis research. His extensive experience and genius made
performing this research a great learning and extremely fulfilling experience. I was
given the liberty to perform most of the work on my own, but could always count on
his cerebration whenever I ran into difficulty. Indeed, this thesis would not have been
a possibility without him. Furthermore, I would like to express my gratitude for the
profound impact he has had on my academic and career path. Following the
completion of my undergraduate degree, I had a general idea of where I wanted to be
career wise but was uncertain of the path that I would need to take to get there. His
constant advice and willingness to work with me to define the most appropriate path
was a service far beyond measure and what was required of him as an academic advisor
and professor. As a result of this, I am now well poised to achieve the career goals that
I have set and look forward to an enjoyable journey in getting there.

xv
I would also like to thank Dr. Ralph Kimberlin for his constant impartment of
knowledge and experience which has significantly accelerated my growth in the area
of Flight Test. His extensive knowledge and his willingness to share has allowed me
to develop a knowledge base far advanced of someone of similar experience.
I would like to acknowledge Dr. Isaac Silver, who performed the flight tests that
provided the data for this thesis and graciously agreed to be a member of my thesis
committee. Though my interaction with Dr. Silver throughout my academic career was
limited, his willingness to share his vast wealth of knowledge and experience was quite
evident from the fortunate occasions on which I interacted with him.

xvi
Dedication
This thesis is dedicated to my parents, Trevor and Luvette Louisy, who have
continually supported me throughout my years of seeking a higher-level education and
pursuing a career as an engineer in the aviation industry. Their constant support, both
financial and prayerful encouragement and well-timed advice have spurred me along
my journey prior to and at Florida Tech and will continue to motivate me as I continue
along my life path.

1
Section 1 Introduction
A Loss of Control (LOC) accident involves an unintended departure of an aircraft from
controlled flight and is the major cause of aircraft fatalities in general aviation (GA)
according to Federal Aviation Administration (FAA), with there being one fatal
accident involving Loss of Control every four days [1]. Though Loss of control
accidents in GA are currently on a downward trend, the number of accidents and
fatalities due to LOC (or loss of control – in flight [LOC-I] as it is referred to in many
EASA documents) are still alarmingly high, as displayed in Figure 1 below. Over the
five-year period analyzed, LOC accounted for an average of 39 fatal accidents and an
average of 66 fatalities each year; therefore, being the root cause for more than 80%
of the fatal accidents and fatalities recorded in Europe in that timeframe [2]. The
numbers in North America, though slightly better, are still cause for great concern.
The National Transportation Safety Board indicated that LOC played a role in more
than 40% of all single-engine, fixed-wing GA fatal accidents [3].

2
Figure 1: Loss of control in flight accidents and fatalities in GA 2011-2015 [2]
Though loss of control can occur during any phase of flight, statistics show that LOC
incidents are more frequent during the takeoff, approach, and landing phases of flight.
Over the same five-year period (2011-2015) analyzed, the EASA found that over 70%
of LOC accidents took place during those three aforementioned phases of flight, with
takeoff accounting for a little less than one third (31 %) of those accidents (Figure 2).
Additionally, Figure 2 shows that spin and stall were the two most common type of
aircraft upsets resulting from loss of control. Given that a spin must be preceded by an
aerodynamic stall, the two types can be combined into one category, therefore
accounting for more than 60% of aircraft upset events recorded in the five-year
timeframe.

3
Figure 2 Fatal accidents per aircraft upset event types 2011-2015 [2]
The takeoff, approach and landing phases of flight are known slow speed operations,
and pilots are trained to be extra diligent when monitoring airspeed during these phases
of flight. However, the data points to the contrary, indicating that pilots are losing
airspeed awareness, not recognizing the warning symbols of impending stall and
ultimately stalling the airplane during these low speed operations. The primary goal of
the pilot, especially during these low speed phases of flight, is to fly the aircraft. Yet
the trends displayed in Figure 2 point to the pilot getting distracted by auxiliary tasks,
losing low airspeed awareness and unable to recognize impending stall.
Stalling an aircraft is generally not “a nail in the coffin” moment as 14 CFR 23.2150
enforces aircraft to have controllable stall characteristics in all phases of flight and
therefore, not have the tendency to inadvertently depart from controlled flight [4].
However, the takeoff, approach and landing phases of flight are also low altitude
operations that take place within the traffic pattern (generally 1000 feet above ground

4
level), giving the pilot minimal time to correctly identify the upset and perform the
appropriate recovery procedure.
Furthermore, the combination of slow speed (low kinetic energy) and low altitude (low
potential energy) puts the aircraft at its lowest total energy during these phases of
flight, making the aircraft most susceptible to LOC during these phases. Pilot
awareness of the energy state of the airplane and proper energy management is,
therefore, critical to safely operate the aircraft during these phases of flight.
The total energy of an aircraft is the sum of the aircraft’s potential energy, a function
of the aircraft’s altitude in reference to the ground, and the aircraft’s kinetic energy, a
function of the aircraft’s velocity. The total energy is depicted mathematically in the
equation below:
𝐸 = 𝐸𝑝𝑜𝑡 + 𝐸𝑘𝑖𝑛 = 𝑚𝑔ℎ +1
2𝑚𝑉2 [1]
𝑊ℎ𝑒𝑟𝑒:
𝐸 = 𝑎𝑖𝑟𝑐𝑟𝑎𝑓𝑡′𝑠 𝑡𝑜𝑡𝑎𝑙 𝑚𝑒𝑐ℎ𝑎𝑛𝑖𝑐𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦
𝐸𝑝𝑜𝑡 = 𝑔𝑟𝑎𝑣𝑖𝑡𝑎𝑡𝑖𝑜𝑛𝑎𝑙 𝑝𝑜𝑡𝑒𝑛𝑖𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦 (𝑚𝑔ℎ)
𝐸𝑘𝑖𝑛 = 𝑘𝑖𝑛𝑒𝑡𝑖𝑐 𝑒𝑛𝑒𝑟𝑔𝑦 (1
2𝑚𝑉2)
𝑔 = 𝑔𝑟𝑎𝑣𝑖𝑡𝑎𝑡𝑖𝑜𝑛𝑎𝑙 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑜𝑛
ℎ = 𝑎𝑖𝑟𝑐𝑟𝑎𝑓𝑡′𝑠𝑎𝑙𝑡𝑖𝑡𝑢𝑑𝑒 𝑎𝑏𝑜𝑣𝑒 𝑔𝑟𝑜𝑢𝑛𝑑 𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑒
𝑉 = 𝑎𝑖𝑟𝑐𝑟𝑎𝑓𝑡′𝑠 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦

5
The aircraft can be assumed to be a point-mass and the application of Newton’s second
law results in the following equation for the forces acting on the aircraft along its flight
path:
𝑇 − 𝐷 = 𝑊𝑠𝑖𝑛(𝛾) + 𝑚𝑎 [2]
𝑤ℎ𝑒𝑟𝑒:
𝑇 = 𝑡ℎ𝑟𝑢𝑠𝑡
𝐷 = 𝑑𝑟𝑎𝑔
𝑊 = 𝑎𝑖𝑟𝑐𝑟𝑎𝑓𝑡′𝑠 𝑤𝑒𝑖𝑔ℎ𝑡
𝛾 = 𝑓𝑙𝑖𝑔ℎ𝑡 𝑝𝑎𝑡ℎ 𝑎𝑛𝑔𝑙𝑒
𝑚 = 𝑎𝑖𝑟𝑐𝑟𝑎𝑓𝑡′𝑚𝑎𝑠𝑠
𝑎 = 𝑎𝑖𝑐𝑟𝑎𝑓𝑡′𝑠𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛
From equation 2 above, it can be seen that when 𝛾 = 0 𝑎𝑛𝑑 𝑎 = 0, (𝑇 − 𝐷) = 0,
representing the steady-state equation for level, unaccelerated flight.
The law of conservation of energy states that energy can neither be created nor
destroyed – only converted from one form of energy to another [7]. In the case of level,
unaccelerated flight, the aircraft’s total mechanical energy will be constant. From
equation 1, the aircraft’s mass and gravitational acceleration are constant, indicating
that energy can be transferred from potential to kinetic solely by descending in altitude
in exchange for an increase in airspeed. This exchange of energy is depicted on Figure
3 as a move from point A to point B.

6
The transfer of energy, however, is not limited to within the system only, as the
conservation law also states that energy can be added to or removed from the energy
stored in an open system. In the case of an aircraft, energy is transferred to the system
(aircraft) via the engine thrust, while energy is transferred from the system (aircraft)
via drag. However, the law of conservation of energy cannot be violated, indicating
that there must be a balance between the net flow of energy transferred through the
system (energy transferred in minus energy transferred out) and the resultant change
in energy stored in the system illustrated by equation (3) below:
𝐸𝑇 − 𝐸𝐷 = ∆𝐸 [3]
𝑊ℎ𝑒𝑟𝑒:
𝐸𝑇 = 𝑒𝑛𝑒𝑟𝑔𝑦 𝑔𝑎𝑖𝑛𝑒𝑑 𝑡ℎ𝑟𝑜𝑢𝑔ℎ 𝑡ℎ𝑟𝑢𝑠𝑡
𝐸𝐷 = 𝑒𝑛𝑒𝑟𝑔𝑦 𝑙𝑜𝑠𝑠 𝑡ℎ𝑟𝑜𝑢𝑔ℎ 𝑑𝑟𝑎𝑔
∆𝐸 = 𝑐ℎ𝑎𝑛𝑔𝑒 𝑖𝑛 𝑡𝑜𝑡𝑎𝑙 𝑚𝑒𝑐ℎ𝑎𝑛𝑖𝑐𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦
From equation 3 above, it can be seen that ∆𝐸 will be positive if 𝐸𝑇 is greater than 𝐸𝐷 ,
resulting in excess energy, or vice-versa, resulting in deficit energy. Excess energy is
required for the aircraft to increase its total energy such as climbing to an altitude while
maintaining airspeed, and is depicted on Figure 3 as a move from point B to C.
However, excess energy is not a very useful parameter, as it only indicates that a
movement from point B to C is possible, but gives no indication how long it will take
the aircraft to reach energy state C. Taking the derivative of equation of 3 with respect
to time gives the rate of change of the airplane’s total mechanical energy (�̇�), or as it
is more commonly known as, the power as displayed in equation 4.

7
�̇� = �̇�𝑇 − �̇�𝐷 = 𝑚𝑔 (𝑑ℎ
𝑑𝑡) + 𝑚𝑉(
𝑑𝑣
𝑑𝑡) [4]
Similarly, if �̇�𝑇 is greater than �̇�𝐷 , the aircraft will possess excess power, not only
indicating that a move from point B to C in Figure 3 is possible, but also indicating
how long it would take the aircraft to reach that new energy state. Dividing equation
4 by weight (mg) gives the rate of change at which the airplane is able to change its
total mechanical energy per unit weight, a term known as specific excess power which
is presented in equation 5 below.
𝑃𝑠 =𝑑ℎ
𝑑𝑡+𝑉
𝑔(𝑑𝑣
𝑑𝑡) [5]
Figure 3: Altitude-velocity diagram showing lines of constant specific Energy
(Es) [5]

8
The number of loss of control accidents, though still an area for concern, are
significantly lower in commercial operations (Note: Commercial operations refer to
regularly scheduled ticketed passenger flights or cargo flights) when compared to
general aviation. The International Air Transport Association (IATA) indicated that
over a ten-year period (January 2009 to December 2018), 777 total commercial
aviation accidents were recorded, with 64 (approximately 8%) being classified as
LOC-I [8]. Table 1 below shows a comparison between the number of LOC accidents
recorded in GA and commercial operations over the same five-year period.
Table 1: Fatal LOC Accidents from 2011 to 2015 in GA and Commercial
Operations [8]
Number of
Fatal LOC
Accidents
2011 2012 2013 2014 2015
General
Aviation
50 48 33 31 28
Commercial
Operations
8 5 8 6 3
It is clear from Table 1 above that LOC accidents are extremely more prevalent in GA
operations when compared to commercial operations, almost 600% more frequent in
GA despite significantly more hours being flown in commercial operations.
Commercial operations owe their increased level of safety partly to better trained and
more experienced pilots, as well as having two pilots in the cockpit. However, the
increase in automation and implementation of systems such as autothrottles,
Underspeed Protection (USP) and Electronic Stability & Protection (ESP) contribute
to the impeccable safety of commercial aviation. These systems not only increase the

9
pilot’s awareness of the aircraft’s energy state, but also reduce pilot workload and in
emergency situations perform correct recovery procedures. The algorithms that govern
these systems are developed from an understanding of the energy characteristics of the
aircraft. Specific excess power is especially important to understand when designing
recovery procedures and setting the margins for safety mechanisms as it defines the
capability of the aircraft, indicating the limits at which the aircraft can safely operate
and governing the recovery procedure that is most appropriate to the situation. Figure
4 below displays specific excess power for various altitudes and how they are
combined to produce constant specific power contours.

10
Figure 4: Sample Ps Curves and Resulting Constant Ps Contours [9]
General aviation is still trying to catch up with the level of automation present in
commercial operations, with higher-end aircraft incorporating advanced autopilots
that include USP and ESP as well as autothrottles. However, most GA aircraft are old,
built in the last century, and are difficult to retrofit with some of these systems.
Additionally, the cost of most of these systems far exceed the cost of most of the
general aviation fleet, making these systems impractical. As a result, research has been
conducted into creating an energy management system that takes principles from these

11
proven systems in an attempt to improve the safety in GA. The system must be
relatively low cost, easily retrofitted onto aircraft and function off parameters already
recorded on the aircraft.
Energy metrics studies have been conducted in an attempt to begin developing an
algorithm that would govern this energy management system. Puranik et al (2017)
conducted an analysis in energy-based metrics in order to develop a reference for what
would define safe operation. Current operating conditions would then be compared to
this reference and based on the level of deviation from the reference would determine
the safety level of the current operation much like Figure 5 below. The top portion of
the figure displays the specific total energy during approach for all flights investigated,
and the shaded regions show the percentage of records within a certain region of
specific energy during the approach. The dashed line represents the average specific
total energy observed during the approach, and the solid line represents the individual
record being compared against the entire sample. The bottom portion of the graph
shows the modified total energy error rate, and essentially shows how far the current
record deviates from the established norm. Based on the data, one is able to establish
tolerance levels that ensures safe operation. Deviations beyond that tolerance (such as
between 2.0 and 1.5 nautical miles left) will trigger the algorithm to provide
appropriate corrective action to the pilot. However, the paucity of data available for
GA aircraft makes developing an accurate algorithm quite difficult. The research
presented in this thesis is intended to assist in alleviating this issue by generating Ps
curves that can be used in the development of this algorithm.

12
Figure 5: Specific Total and Modified Total Energy Error Rate during
approach [10]
This research is unique as it investigates the effects of altitude and flap configuration
on a Part 23 aircraft (PA-28-161). The PA-28-161 is a single-engine piston aircraft
certified to fly in the United States under CFR 14 Part 23. Single- engine piston aircraft
account for more than 80% of the GA fleet [11], making the results of this investigation
applicable to most of the GA fleet. Much of the research conducted into specific excess
power examines the aircraft in the flaps retracted configuration. As seen from FAA
and EASA statistics, the most critical phases of flight for LOC (takeoff, approach and
landing) almost always require flap operation. This investigation into the effects of

13
flap configuration will provide more operationally realistic data regarding specific
excess power during those critical phases, therefore greatly increasing the accuracy of
the algorithm. Additionally, this investigation examined relationships between altitude
and specific excess power, in order to generate trends for comparison. The ultimate
goal is to create a system that accurately models the energy of every aircraft it is
installed on. The analysis of the trends observed was conducted in an attempt to
develop a method that would generate an accurate algorithm, to avoid having to
perform extensive flight testing of every aircraft that the system is intended to go on.
Continued research into Ps in GA aviation is integral to reducing the amount of
accidents as a result of LOC, as shown by the “success” of commercial operations in
this accident category. Increased knowledge of performance metrics will allow for the
design of appropriate systems and measures that will help GA safety numbers
eventually match those of commercial operations, as it pertains to LOC.

14
Section 2 Test Methods and Materials
2.1 Test Aircraft
Figure 6 PA-28-161 Piper Warrior – N618FT
The test aircraft depicted in Figure 6 is PA-28-161 Piper Warrior with FAA
registration N618FT. The aircraft is owned and operated by the Flight Test
Engineering Department at Florida Institute of Technology. The Piper Warrior is a
single-engine light trainer with a maximum gross takeoff weight of 2440 pounds. The
aircraft is a low-wing, fixed landing gear, four-place aircraft powered by a normally
aspirated Lycoming O-320 engine producing a maximum of 160 hp. The aircraft has
a fixed pitch propeller and conventional flight controls, with full flaps setting
corresponding to 40 degrees of flap deflection. This aircraft was manufactured in 1985
and is equipped with the Garmin G5.

15
2.2 Instrumentation
All data requirements for the level acceleration and level deceleration tests were
parameters that are normally displayed to pilots; hence, no additional instrumentation
was required aside from the instruments/avionics suite already installed in the aircraft.
The only supplementary instrumentation used for data collection was an SD card.
The primary form of data collection used was the data recorded by G5 and stored on
the SD card installed inside it. Data displayed on the G5 were also collected on
handwritten flight test cards in the rare case that the SD card data were unreadable.

16
2.3 Flight Log
Table 2: Flight Log
Date Aircraft Crew Flight Time (hours)
03/25/2019 PA-28-161 Isaac Silver, Brian Kish 1.5
03/26/2019 PA-28-161 Isaac Silver, Tjimon
Louisy, Brian Kish
1.6
Table 2 above shows the log of test flights that were performed as a part of this
program. Instrument error resulted in no data being recorded on the flight performed
on 03/25/2019, requiring the crew to re-fly the test points on 03/26/2019.

17
2.4 Flight Test Locations and Crew
Figure 7: Test Locations [12]
All test flights were launched from the FIT Aviation facility at the Orlando Melbourne
International Airport (KMLB) in Melbourne, Florida. The tests were conducted in
areas to the east and southeast of the airport over the Atlantic Ocean.
The flight tests were conducted by a crew from the Florida Institute of Technology.
Isaac Silver was the pilot, and Tjimon Louisy and Brian Kish were the Flight Test
Engineers.

18
Section 3 Data Reduction Methods
3.1 Data Requirements
The test parameters required for the level acceleration and level deceleration tests
were:
(i) time
(ii) indicated airspeed
(iii) pressure altitude
(iv) outside air temperature.
The indicated airspeed was converted to calibrated airspeed using the airspeed
correction tables present in the PA-28-161 Warrior Pilot’s Operating Handbook
(POH). Additionally, the power-on stall speed and maximum level flight speed were
utilized for data reduction of the steady level accelerations.

19
3.2 Test Procedures
All tests were conducted over the Atlantic Ocean, in areas east and southeast of the
Orlando Melbourne International Airport (KMLB). The tests were conducted at 1300
feet, 3000 feet, 5000 feet and 7000 feet. The original test plan called out testing at
1000, 3000, 5000 and 7000 feet. However, conditions below 1300 feet on the day of
testing were deemed unfavorable for accurate data collection using the test procedures
that were to be employed. The test pilot was responsible for operating the aircraft and
performing the test point procedures, while the flight test engineer (FTE) recorded
pertinent data.
The level acceleration tests commenced with the pilot slowing the aircraft down to a
speed just above the power-on stall speed for the applicable configuration (clean or
full flaps) at an altitude just below the target altitude. The mixture was set to the full
rich position and the test pilot advanced the throttle to the full power position. The test
pilot allowed the aircraft to climb to the target altitude at the designated minimum
airspeed, and upon reaching the target altitude, the pilot levelled off and allowed the
aircraft to accelerate. The FTE recorded the GPS time (for reference when retrieving
data from the Garmin SD card) once the aircraft reached the target altitude and began
filling in the handwritten flight test cards. The pilot maintained altitude (within ±50
feet of the target altitude) and configuration until the airspeed stabilized. Once the
airspeed stabilized, the maximum level flight speed was recorded. The power-on stall
speeds were recorded during stall characteristics testing of the PA-28-161. These were
the lowest speeds achieved during testing in both configurations.

20
The level deceleration tests in the clean configuration commenced with the pilot
achieving maximum level flight speed at the target altitude. Once airspeed stabilized,
the FTE recorded the GPS time and the pilot retarded the throttle to idle power. For
the level deceleration tests in the full-flaps configuration, the pilot achieved the lower
of maximum flap extend speed or maximum level flight speed at the target altitude.
Once the airspeed stabilized, the FTE recorded the GPS time, and the pilot extended
the flaps to its maximum deflection and retarded the throttle to idle power. For both
the clean configuration and the full-flaps configuration, the pilot-maintained altitude
(within ±50 feet of the target altitude) and configuration until the plane decelerated to
the power-off stall speed, while the FTE filled in the handwritten flight test cards.
(Note: The tests were terminated at 1.1 times the applicable stall speed for the
configuration being tested at 1300 feet, to avoid stalling the aircraft at such a low
altitude).

21
3.3 Data Reduction
Flight test data were recorded using an SD card placed inside the Garmin Primary
Flight Display. The Garmin display recorded data at a speed of 1 hertz. This allowed
for the values for the necessary test parameters (altitude and airspeed) to be analyzed
in one-second increments. Given that the temperature would remain relatively constant
throughout the test run at the specified altitude, it was only recorded at the start of the
run using the OAT probe. After tabulating a spreadsheet with time, airspeed, and
altitude for each run, the following steps were performed to create Ps curves:
1. First, the airspeed corrections listed in the PA-28-161 Warrior Pilot’s
Operating Handbook (POH) were applied to the indicated airspeed (IAS)
values to obtain calibrated airspeed (CAS).
Example: 100 KIAS = 96 KCAS.
Note: The Garmin G5 was assumed to have zero instrument error.
2. The density ratio (σ) was then calculated using the equation 𝜎 =
(1−6.87535∗10−6∗ℎ𝑝)5.2561
(𝑇𝑎+273.15)
288.15
where Ta is the ambient temperature at altitude in
degrees Celsius.
Example:
𝜎 =(1 − 6.87535 ∗ 10−6 ∗ 3075𝑓𝑡)5.2561
(18 + 273.15)288.15
= 0.88456

22
3. The calibrated airspeed values were then converted from knots to ft/s.
Example:
100 𝑘𝑡𝑠 ∗ 6076.12 (
𝑓𝑡𝑛𝑚)
3600 (𝑠
ℎ𝑜𝑢𝑟)= 168.781 𝑓𝑡/𝑠
4. Microsoft Excel software was then used to plot the values of CAS in ft/s against
time and the trend line function was used to derive an appropriate curve fit. For
the steady-level accelerations, a piecewise function was used to accurately
represent the trends observed at the low-speed end of the plot. This was
required because of the unique behavior experienced at the low-speed end, due
to propeller efficiency and the complexity of the thrust curve associated with
propeller driven aircraft.
Example: Figures 8 and 9 show the plot of calibrated airspeed against time for
the PA-28-161 aircraft in the clean configuration during the level acceleration
run at 1300 feet. The equation of the curve fit to six decimal places is shown
below Figures 8 and 9. Figure 8 was solved for t = 10s as this piece-wise
function accurately modeled velocity versus time for the first 15 seconds of the
run, while Figure 9 was solved for t = 30s, as this piece-wise function
accurately modeled velocity versus time for t = 16 seconds and onwards for
the run.

23
Figure 8: CAS vs Time (First 15s)
𝑉𝑐 = −0.017493𝑡3 + 0.417240𝑡2 − 0.563237𝑡 + 104.456023
= −0.017493(103) + 0.417240(102) − 0.563237(10)+ 104.456023 = 123.05 𝑓𝑡/𝑠
y = -0.017493x3 + 0.417240x2 - 0.563237x + 104.456023
0
20
40
60
80
100
120
140
0 2 4 6 8 10 12 14 16
CA
S (f
t/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

24
Figure 9: CAS vs Time (16s Onwards)
𝑉𝑐 = −0.012799𝑡2 + 2.046088𝑡 + 110.7742407
= −0.012799(302) + 2.046088(30) + 110.7742407= 160.64 𝑓𝑡/𝑠
5. The derivative of the curve fit was obtained and used to calculate the rate of
change of velocity (𝑑𝑣
𝑑𝑡) at each time step, or each fitted CAS value.
Example:
𝑑𝑉𝑐𝑑𝑡= −0.025598𝑡 + 2.046088 = −0.025598(30) + 2.046088 = 1.278
𝑓𝑡
𝑠2
y = -0.012799x2 + 2.046088x + 110.742407
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90
CA
S (f
t/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

25
6. The pressure altitude was then plotted against time and the trend line function
was used to derive an appropriate curve fit. The nature of the test required the
pilot to maintain altitude within ±50ft of the test condition altitude, resulting
in constant corrections and a plot that shows continuous increases and
decreases in altitudes. Note: The pressure altitude referenced to conduct
the test was that displayed on the altimeter set to 29.92. The pressure
altitude used in the data reduction was that recorded on the Garmin
Display. The Garmin Display had a positive offset when compared with
the altimeter. A 35 foot offset was noted at 1300 feet, a 70 foot offset was
noted at 3000 feet, a 90 foot was noted at 5000 feet, and a 120 foot offset
was noted at 7000 feet. An initial plot was created to attempt to model each
change in altitude over the entire run (see Figure 10 above) but became
2500
2600
2700
2800
2900
3000
3100
3200
3300
3400
3500
0 20 40 60 80 100 120
Hp
(ft
)
Time (s)
Hp vs Time for Steady-Level Acceleration in Clean Configuration
Figure 10: Pressure Altitude vs Time

26
extremely complex due to the number of changes and the limited ability of
Excel for this type of analysis. Additionally, the plots resulted in inaccurately
large rates of change due to the plot trying to encompass every single data
point. Therefore, a more simplistic polynomial curve that modeled the general
trend of the aircraft with reference to altitude (i.e. increasing, decreasing or
maintaining) as time progressed was chosen (see Figure 11 below). This model
tended to ignore the changes from point to point (one second increments) and
focused on the larger trends (generally changes in altitude over 5 seconds or
longer increments). This model appeared to be a better representation of what
the actual aircraft was experiencing, and the derivative of this model was used
to obtain more appropriate rates of change.

27
Figure 11: Modeling Pressure Altitude vs Time
𝐡 = −𝟎. 𝟎𝟎𝟎𝟎𝟎𝟐𝐭𝟒 + 𝟎. 𝟎𝟎𝟎𝟔𝟑𝟖𝒕𝟑 + 𝟎.𝟎𝟔𝟑𝟎𝟓𝟓𝒕𝟐 − 𝟐.𝟒𝟒𝟖𝟎𝟔𝟖𝐭+ 𝟑, 𝟎𝟒𝟏. 𝟒𝟕𝟑𝟗𝟕𝟗
𝑑ℎ
𝑑𝑡= −0.000008𝑡3 + 0.001914𝑡2 − 0.12611𝑡 + 2.448068
= −0.000008(0)3 + 0.001914(0)2 − 0.12611(0) + 2.448068
= 2.448068 𝑓𝑡
𝑠
7. True airspeed values were calculated using the known equation, 𝑉𝑇 =𝑉𝑐
√𝜎.
Example:
𝑉𝑇 =168.781 𝑓𝑡/𝑠
√0.88456= 179.4568 𝑓𝑡/𝑠
y = -0.000002x4 + 0.000638x3 - 0.063055x2 + 2.448068x + 3,041.473979
2500
2600
2700
2800
2900
3000
3100
3200
3300
3400
3500
0 20 40 60 80 100 120
Hp
(ft
)
Time (s)
Hp vs Time for Steady-Level Acceleration in Clean Configuration

28
8. The specific excess power values (Ps) were then calculated using values
obtained in previous steps. Two Ps values were calculated for each airspeed.
One using the conventional method that assumes the 𝑑ℎ
𝑑𝑡 component to be zero
and the other that includes the calculated 𝑑ℎ
𝑑𝑡 component. The Ps was calculated
in the units of ft/minute. The Ps equation is derived from the energy
equation, 𝐸 =1
2
𝑊
𝑔𝑣2 +𝑊ℎ. Dividing through by weight (W) gives 𝐸𝑠 =
1
2𝑔𝑣2 + ℎ. Taking the time derivative yields
𝑑
𝑑𝑡(𝐸𝑠) = 𝑃𝑠 =
𝑣
𝑔
𝑑𝑣
𝑑𝑡+𝑑ℎ
𝑑𝑡. The
equation used to calculate Ps without the 𝑑ℎ
𝑑𝑡 component was 𝑃𝑠 = (
𝑉𝑇
𝑔∗𝑑𝑣
𝑑𝑡) ∗
60. When the 𝑑ℎ
𝑑𝑡 component was included the equation became 𝑃𝑠 =
((𝑉𝑇
𝑔∗𝑑𝑣
𝑑𝑡) +
𝑑ℎ
𝑑𝑡) ∗ 60.
Examples:
𝑃𝑠 = (179.4568
𝑓𝑡𝑠
32.2 𝑓𝑡𝑠2
∗ 0.4589 𝑓𝑡
𝑠2) ∗ 60
𝑠
𝑚𝑖𝑛= 153.452
𝑓𝑡
𝑚𝑖𝑛
𝑃𝑠 =
(
(179.4568
𝑓𝑡𝑠
32.2 𝑓𝑡𝑠2
∗ 0.4589𝑓𝑡
𝑠2) + 0.2761
𝑓𝑡
𝑠
)
∗ 60 𝑠
𝑚𝑖𝑛= 170.018
𝑓𝑡
𝑚𝑖𝑛
9. Plots of Ps against KCAS were generated for every test run performed, with
and without the 𝑑ℎ
𝑑𝑡 components. The curves for the steady-level accelerations

29
were anchored on the low speed end by the power-on stall speed and on the
high-speed end by the maximum level flight speed as the aircraft has zero
excess power at those airspeeds. The curves for the steady-level decelerations
were not anchored on either end (low speed nor high speed), and only the data
collected during the run was plotted. Outlying points were not used in
calculating the Ps curve to allow for the most accurate result.
Example: Figure 12 shows the Ps plot for the PA-28-161 Warrior aircraft with the dh
dt
component assumed to be zero for the clean configuration acceleration at 1300 feet.
The power-on stalling speed is 56 KCAS and the maximum level flight speed VH is
119 KCAS. Figure 13 shows the Ps plot for the PA-28-161 Warrior aircraft with the
dh
dt component incorporated for the clean configuration acceleration at 3000 feet. The
power-on stalling speed is 56 KCAS and the maximum level flight speed VH is 114
KCAS. Figure 14 shows the Ps plot for the PA-28-161 Warrior aircraft with the dh
dt
component assumed to be zero for the clean configuration deceleration at 1300 feet.
The inclusion of the dh
dt component will not change the overall shape of the graphs, nor
the trends observed. However, the inclusion of the dh
dt component is to try to make the
absolute specific excess power values calculated for each airspeed more accurate. The
steady-level deceleration plots will be below the airspeed axis (x-axis), as there will
be a deficit in power (negative specific excess power).

30
Figure 12: Ps vs CAS Level-Acceleration
Figure 13: Ps vs CAS Level-Acceleration (𝒅𝒉
𝒅𝒕≠ 𝟎)
0
100
200
300
400
500
600
50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (KTS)
Specific Excess Power vs CAS for Steady-Level Acceleration in Clean Configuration at 1300 Feet
0
50
100
150
200
250
300
350
400
450
50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration in Clean Configuration at 3000 feet
(with dh/dt component)

31
Figure 14: : Ps vs CAS Level-Deceleration
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
0.0 20.0 40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration in Clean Configuration at 1300 feet

32
Section 4 Results
4.1 Ps Plots (𝒂𝒔𝒔𝒖𝒎𝒆 𝒅𝒉
𝒅𝒕= 𝟎)
The Ps plots analyzed for the steady-level accelerations and steady-level decelerations
are presented in Section 4.1.1 and Section 4.1.2 respectively.
4.1.1 Steady-Level Accelerations
Figure 15 below shows the specific excess power versus the calibrated airspeed in the
clean configuration for the four altitudes investigated.
Figure 15: Ps vs CAS for Clean Configuration Level-Accelerations
From the figure above it is observed that altitude had a negative effect on Ps, i.e. an
increase in altitude resulted in a lower specific excess power for all speeds. The
0
100
200
300
400
500
600
50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (KTS)
Specific Excess Power Vs CAS for Steady-Level Acceleration in Clean Configuration for Various Altitudes
1300 Feet 3000 Feet 5000 Feet 7000 Feet

33
reduction in specific excess power and the decrease in the maximum level flight speed
observed can be attributed to a deterioration in engine performance with altitude, both
in power and thrust available (via the propeller), for a normally aspirated piston
engine. Stall speed (KCAS), in accordance with the known theory, remained
unchanged with altitude. The slight variation noted was due to random error.
Additionally, Vy was approximately 79 KCAS for all altitudes, with a minor decrease
noted in Vy as altitude increased. This is well in line with the principle that a slight
decrease in Vy, in terms of CAS or IAS will occur as altitude increases, due to
movement in both the power available and power required curves. Increasing altitude
results in the power required curve moving upwards and shifting to the right. The
power available curve on the other hand, comes straight down, due to the deterioration
in engine performance with increased altitude. This results in Vy, in terms of TAS,
increasing (moving to the right) as seen in Figure 85 in Appendix B. However, this
increase in terms of TAS happens at a slower rate than the rate CAS or IAS fall behind
TAS as the aircraft climbs. The net result is a decrease in Vy, in terms of CAS or IAS.

34
Figure 16 below shows the specific excess power versus the calibrated airspeed in the
full flaps configuration for the four altitudes investigated.
Figure 16: : Ps vs CAS for Full Flaps Configuration Level-Accelerations
From the figure above it is observed that an increase in altitude resulted in a reduction
in specific excess power. Deterioration in engine performance with altitude, both in
power and thrust available, for a normally aspirated piston engine is the main reason
for the reduction in specific excess power, and also accounts for the decrease in the
maximum level flight speed observed. Stall speed (KCAS), as expected from known
theory, remained unchanged with altitude (slight variation noted due to random error).
Vy was approximately 62 KCAS for all altitudes, with a minor decrease noted in Vy as
altitude increased. The minor decrease in Vy as altitude increased is also in line with
known theory, as discussed previously for the clean configuration (Figure 15).
0
50
100
150
200
250
300
350
400
40.0 50.0 60.0 70.0 80.0 90.0 100.0
Ps
(ft/
min
)
CAS (KTS)
Specific Excess Power Vs CAS for Steady-Level Acceleration with Full Flaps for Various Altitudes
1300 Feet 3000 Feet 5000 Feet 7000 Feet

35
Figure 17 below shows the maximum specific excess power versus pressure altitude
for the two configurations investigated.
Figure 17: : Relationships between Ps and Altitude
The figure above shows that there is an inverse linear relationship between altitude
and specific excess power for both configurations investigated. The figure also
indicates that altitude has a similar effect on specific excess power for both clean and
full flaps configuration, as displayed by the almost identical slopes of the graphs. The
figure above also shows that the aircraft has a sea-level specific excess power of
approximately 610 ft/min and 400 ft/min in the clean configuration and full flaps
configurations, respectively. Additionally, it is observed that the aircraft has an
absolute ceiling of approximately 12,800 feet and 8,500 feet in the clean configuration
y = -0.047379x + 608.070344R² = 0.942683
y = -0.047044x + 402.954017R² = 0.964446
0
100
200
300
400
500
600
0 1000 2000 3000 4000 5000 6000 7000 8000
Ps
(ft/
min
)
Pressure Altitude (ft)
Specific Excess Power Relationship with AltitudeClean Config Full Flaps

36
and full flaps configurations, respectively. The above equation (clean config.) was
used to obtain the specific excess power at altitude via the equation below:
𝑃𝑠𝑎𝑙𝑡 = (−0.047379 ∗ 𝑎𝑙𝑡𝑖𝑡𝑢𝑑𝑒) + 608.070344
OR
𝑃𝑠𝑎𝑙𝑡 = 608.070344 − 0.047379(𝑎𝑙𝑡𝑖𝑡𝑢𝑑𝑒) [6]
Figure 18 below shows the maximum level flight speed versus pressure altitude for
the two configurations investigated.
Figure 18: Relationships between Vh and Altitude
The figure above shows an inverse linear relationship between altitude and maximum
level flight speed for both configurations investigated. From the figure it can be
inferred that altitude has a similar effect on the maximum level flight in both the clean
configuration and the full flap configuration, as demonstrated by the nearly identical
y = -0.002790x + 122.621185R² = 0.969298
y = -0.002841x + 90.577528R² = 0.957491
0
20
40
60
80
100
120
140
0 1000 2000 3000 4000 5000 6000 7000 8000
Vh
(K
CA
S)
Pressure Altitude (ft)
Maximum Level Flight Speed Relationship with Altitude
Clean Config Full Flaps

37
slopes. Additionally, the maximum level flight speed at sea-level is observed to be
approximately 123 KCAS and 91 KCAS in the clean configuration and full flaps
configurations, respectively. The above equation (clean config.) was used to obtain the
maximum level flight speed via the equation below:
𝑉𝐻𝑎𝑙𝑡 = (−0.002790 ∗ 𝑎𝑙𝑡𝑖𝑡𝑢𝑑𝑒) + 122.621185
OR
𝑉𝐻𝑎𝑙𝑡 = 122.621185 − 0.002790(𝑎𝑙𝑡𝑖𝑡𝑢𝑑𝑒) [7]
Figure 19 below shows the best rate of climb speed (Vy) versus pressure altitude for
the two configurations investigated.
Figure 19: Relationships between Vy and Altitude
The figure shows an inverse linear relationship between altitude and Vy for both
configurations investigated. However, the negative slope is quite negligible that Vy
y = -0.000325x + 62.476174R² = 0.992179
y = -0.000314x + 80.178213R² = 0.998522
50
55
60
65
70
75
80
85
0 1000 2000 3000 4000 5000 6000 7000 8000
Vy
(KC
AS)
Pressure Altitude (ft)
Vy Relationship with AltitudeFull Flaps Clean Config

38
can be assumed to be constant throughout all operating altitudes for the respective
configurations. Most aircraft with a normally aspirated engine (like the PA-28-161)
have an absolute ceiling of approximately 12,500 feet in the clean configuration, which
would equate to an approximate 4 KCAS (based on the slopes above) decrease in Vy
from the sea-level value, for both configurations.
A combination of these two linear relationships (and assuming a constant Vy), along
with the constant stall speed, and assuming that specific excess power is zero at stall
and maximum level flight speeds, can be used to manipulate the sea-level baseline
specific excess power curve to depict the aircraft’s current specific excess power
curve. Table 3 below outlines the process for the aircraft in the clean configuration,
and Figure 20 below shows the resulting manipulated specific excess power curves.
Table 3: Values to Produce Aircraft Specific Excess Power Curve in Clean Configuration
Altitude
Sea-level Baseline
(Clean Config) 2000 6000
Airspeed
(KIAS)
Ps
(ft/min)
Airspeed
(KIAS)
Ps
(ft/min)
Airspeed
(KIAS)
Ps
(ft/min)
Stall 50[1] 0[2] 50[1] 0[2] 50[1] 0[2]
Vy 79[1] 644[1] 79[4] 549[3] 79[4] 360[3]
Max 120[1] 0[2] 114[3] 0[2] 103[3] 0[2]
[1] Value obtained from PA-28-161 Warrior POH
[2] Assumption of zero excess power at stall speed and maximum level flight speed
[3] Calculated from relationship obtained between altitude and respective variable
[4] Assume constant Vy

39
Figure 20 below shows the sea-level baseline specific excess power curve and the
derived specific power curves based on altitude.
Figure 20: Equation-derived Ps curves
The figure above shows the sea-level baseline, the 2000 feet altitude derived curve,
and the 6000 feet altitude derived curve. It is observed that the shape of the curves
obtained are not accurate representations of the specific excess power curve, as the
backside of the curves depicted in Figure 20 are shallower in slope than the actual
specific excess power curve. Additionally, the curves depicted in Figure 20 show
maximum specific excess power being obtained at a speed which deviates slightly
from Vy. These two incongruities can be attributed to having used only three data
points to generate the curves, and the limitations of the graphing software (the software
fits a smooth curve through the three data points, but is unable to decipher that the
peak of the curve should occur at Vy). Overall, this does not adversely affect the
0
100
200
300
400
500
600
700
40 50 60 70 80 90 100 110 120 130
Ps
(ft/
min
)
KIAS
Specific Excess Power vs KIAS for Clean Configuration
Sea-Level Baseline 2000 Feet 6000 Feet

40
accuracy of the curves as the difference in the slope of the backside of the curves
depicted and actual specific excess power curves are negligible, and the specific excess
power is relatively constant (curve being relatively flat) at speeds around Vy.
The process can be repeated for the full flaps configuration. However, the sea-level
baseline data would have to be obtained for the full flaps configuration before applying
the linear equations derived above (Figures 17 to 19). Note: Given the identical
slopes for both the clean configuration and full flaps configuration (minor
variation attributed to random error), the slope values obtained in the clean
configuration can be used to define the relationship between altitude and the
pertinent parameters (Specific Excess Power, Maximum Level Flight Speed and
Vy) in the full flaps configuration.
Given that full flaps data for climb and cruise performance is not normally published
in POHs and AFMs, additional flight testing would have to be performed to obtain the
requisite sea-level baseline data. This method was deemed impractical, as it would be
near impossible to flight test every aircraft that the Energy Management System is
intended to be installed on. Therefore, an investigation was conducted to derive a set
of equations that could calculate with a high degree of precision, the corresponding
full flaps configuration performance based on the clean configuration data. This would
allow the clean configuration data that are already posted in the POH or AFM to be
manipulated to give an accurate representation of the aircraft’s energy state when the
flaps are deployed.

41
Figure 21 below shows the specific excess power versus calibrated airspeed at 1300
feet for the two configurations investigated.
Figure 21: Ps curves for Level-Accelerations at 1300 feet
The figure above shows a leftward shift and overall reduction in the Ps envelope when
the flaps are fully deployed on the aircraft. From the clean configuration to full flap
deployment, max Ps decreased from 530 ft/min to 330 ft/min, Vy decreased from 80
KCAS to 62 KCAS, and maximum level flight speed decreased for 118 KCAS to 86
KCAS.
0
100
200
300
400
500
600
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power Vs CAS for Steady-Level Acceleration at 1300 Feet
Clean Config Full flaps

42
Figure 22 below shows the specific excess power versus calibrated airspeed at 3000
feet for the two configurations investigated.
Figure 22: Ps curves for Level-Accelerations at 3000 feet
The figure above shows a leftward shift and overall reduction in the Ps envelope when
the flaps are fully deployed on the aircraft. From the clean configuration to full flap
deployment, max Ps decreased from 470 ft/min to 290 ft/min, Vy decreased from 80
KCAS to 62 KCAS, and maximum level flight speed decreased for 116 KCAS to 84
KCAS.
0
50
100
150
200
250
300
350
400
450
500
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power Vs CAS for Steady-Level Acceleration at 3000 feet
Clean Config Full Flaps

43
Figure 23 below shows the specific excess power versus calibrated airspeed at 5000
feet for the two configurations investigated.
Figure 23: Ps curves for Level-Accelerations at 5000 feet
The figure above shows a leftward shift and overall reduction in the Ps envelope when
the flaps are fully deployed on the aircraft. From the clean configuration to full flap
deployment, max Ps decreased from 410 ft/min to 145 ft/min, Vy decreased from 79
KCAS to 61 KCAS, and maximum level flight speed decreased for 108 KCAS to 75
KCAS.
0
50
100
150
200
250
300
350
400
450
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power Vs CAS for Steady-Level Acceleration at 5000 feet
Clean Config Full Flaps

44
Figure 24 below shows the specific excess power versus calibrated airspeed at 7000
feet for the two configurations investigated.
Figure 24: Ps curves for Level-Accelerations at 7000 feet
The figure above shows a leftward shift and overall reduction in the Ps envelope when
the flaps are fully deployed on the aircraft. From the clean configuration to full flap
deployment, max Ps decreased from 250 ft/min to 80 ft/min, Vy decreased from 78
KCAS to 60 KCAS, and maximum level flight speed decreased from 103 KCAS to 71
KCAS.
0
50
100
150
200
250
300
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power Vs CAS for Steady-Level Acceleration at 7000 feet
Full Flaps Clean Config

45
Figures 21-24 display a clear trend of reduction in specific excess power, maximum
level flight speed, Vy, and lowering of stall speed with full flap deployment; all of
which are in line with the known theory. Specific excess power decreases due to the
increase in the power required, which results from an increase in the total drag of the
aircraft due to flap deployment (both parasite and induced drag increase due to flap
deployment). Maximum level flight speed decreases due to the increase in total drag
resulting from flap deployment, for the same amount of thrust at the respective
altitudes. Stall speed is lowered as flap deployment increases the camber of the airfoil
and consequently increases the coefficient of lift at the respective angles of attack and
the maximum lift coefficient. This allows for the aircraft to produce more lift for a
given airspeed when compared to the clean configuration. The reduction in Vy is due
to the shift in the power required curve, as a result of the deployment of the flaps
causing an increase in the aircraft’s total drag (see Figure 84 in Appendix B).
Table 4 below displays the maximum specific excess power for the two configurations
for all four altitudes investigated, as well as the decrease in maximum specific excess
power, when comparing the full flaps configuration to the clean configuration.
Table 4: Max Ps Comparison between Clean Configuration and Full Flaps Configuration
Altitude
(ft)
Max Clean Ps
(ft/min)
Max Full Flaps Ps
(ft/min)
Reduction in Ps
(ft/min)
1300 530 330 200
3000 470 290 180
5000 410 145 265
7000 250 80 170

46
Table 5 below displays the maximum level flight speed for the two configurations for
all four altitudes investigated, as well as the decrease in maximum level flight speed,
when comparing the full flaps configuration to the clean configuration.
Table 5: VH Comparison between Clean Configuration and Full Flaps Configuration
Altitude
(ft)
Clean VH
(KCAS)
Full Flaps VH
(KCAS)
Reduction in
VH (KCAS)
1300 118 86 32
3000 116 84 32
5000 108 75 33
7000 103 71 32
Table 6 below displays the best rate of climb speed (Vy) for the two configurations for
all four altitudes investigated, as well as the decrease in Vy, when comparing the full
flaps configuration to the clean configuration.
Table 6: Vy Comparison between Clean Configuration and Full Flaps Configuration
Altitude
(ft)
Clean Vy
(KCAS)
Full Flaps Vy
(KCAS)
Reduction in
Vy (KCAS)
1300 80 62 18
3000 80 62 18
5000 79 61 18
7000 78 60 18
Tables 4-6 all show a decrease in specific excess power, maximum level flight speed
and Vy, when the full flaps configuration was compared to the clean configuration, for
the respective altitudes. An attempt was made to obtain trend values that describe how
flap deployment affects the previously mentioned variables, in order to develop a

47
system of equations that could be used to manipulate clean configuration data to
determine with a high degree of precision, aircraft performance in the full flaps
configuration. Given that the previous observations showed that altitude had a similar
effect on the aircraft in both configurations, the effect of flap deployment could,
therefore, be isolated from this comparison.
From Table 4 it can be seen that there is slight variation in the decrease in maximum
specific excess power when comparing the clean configuration to the full flaps
configuration. However, computing an average was determined to be a suitable
method to address the variation observed. The average decrease in maximum specific
excess power from the clean configuration to the full flaps configuration was
approximately 200 ft/min. This indicates that the maximum specific power that the
aircraft can attain in the full flaps configuration is 200 ft/min less than in the clean
configuration at any altitude. This is illustrated by equation 8 shown below:
𝑃𝑠𝑚𝑎𝑥𝑓𝑢𝑙𝑙 𝑓𝑙𝑎𝑝𝑠 = 𝑃𝑠𝑚𝑎𝑥𝑐𝑙𝑒𝑎𝑛 𝑐𝑜𝑛𝑓𝑖𝑔 − 200 (𝑓𝑡
min) [8]
From Table 5 it can be seen that maximum level flight speed decreases by
approximately 32.5 KCAS when comparing the clean configuration to the full flaps
configuration. This indicates that the maximum level flight speed that the aircraft can
obtain at any altitude in the full flaps configuration is 32 KCAS lower than in the clean
configuration, and is illustrated by equation 9 shown below:
𝑉𝐻𝑓𝑢𝑙𝑙 𝑓𝑙𝑎𝑝𝑠 = 𝑉𝐻𝑐𝑙𝑒𝑎𝑛 𝑐𝑜𝑛𝑓𝑖𝑔 − 32 (𝐾𝐶𝐴𝑆) [9]

48
From Table 6 it can be seen that Vy decreases by approximately 18 KCAS when
comparing the clean configuration to the full flaps configuration. This indicates that
the best rate of climb speed at any altitude in the full flaps configuration is 18 KCAS
lower than in the clean configuration, and is illustrated by equation 10 shown below:
𝑉𝑦𝑓𝑢𝑙𝑙 𝑓𝑙𝑎𝑝𝑠 = 𝑉𝑦𝑐𝑙𝑒𝑎𝑛 𝑐𝑜𝑛𝑓𝑖𝑔 − 18 (𝐾𝐶𝐴𝑆) [10]
A combination of these three linear relationships presented in Equations 8, 9 and 10
above, were used to manipulate the clean configuration data to obtain the full flaps
configuration data and produce the specific excess power curves. Given that the effect
of altitude on both configurations was identical, the altitude and flap relationships were
commutative (i.e. the order in which they were applied did not change the result). For
curves at altitude, the sea-level baseline data was first manipulated using the altitude
relationships (Equations 6 and 7) to obtain the clean configuration data for the specific
altitude. The full flap relationships were then applied to the manipulated data for that
altitude to obtain the full flaps configuration data for each specific altitude (Note: The
full flap relationships could have been applied first, followed by the altitude
relationships. This order of operations would have produced the same results).
Table 7 below outlines the process for obtaining the full flaps configuration specific
excess power data, and Figure 25 below shows the resulting derived specific excess
power curves.

49
Table 7: Values to Produce Aircraft Specific Excess Power Curve for Full Flaps
Altitude
and
Config
Sea-level Baseline
(clean config)
Sea-Level Full
Flaps
2000 Clean
Config 2000 Full Flaps
Airspeed
(KIAS)
Ps
(ft/min)
Airspeed
(KIAS)
Ps
(ft/min)
Airspeed
(KIAS)
Ps
(ft/min)
Airspeed
(KIAS)
Ps
(ft/min)
Stall 50[1] 0[2] 44[1] 0[2] 50[1] 0[2] 44[1] 0[2]
Vy 79[1] 644[1] 61[3] 444[3] 79[5] 555[4] 61[3] 355[3]
Max 120[1] 0[2] 88[3] 0[2] 114[4] 0[2] 82[3] 0[2]
[1] Value obtained from PA-28-161 Warrior POH
[2] Assumption of zero excess power at stall speed and maximum level flight speed
[3] Calculated from flap relationships established
[4] Calculated from relationship obtained between altitude and respective variable
[5] Assume constant Vy
Figure 25: Equation-derived Ps curves for Full Flaps Configuration
The figure above shows the sea-level baseline, the 2000 feet altitude derived curve and
the corresponding full flaps derived curves for both the sea-level baseline and 2000
feet altitude derived curve. It is observed that the shape of the curves obtained are not
0
100
200
300
400
500
600
700
40 50 60 70 80 90 100 110 120 130
Ps
(ft/
min
)
KIAS
Specific Excess Power vs KIAS
Sea-level Clean Config Sea-level Full Flaps
2000 feet Clean Config 2000 feet Full Flaps

50
completely accurate representations of the specific excess power curve, as the backside
of the curves depicted in Figure 25 are shallower in slope than the actual specific
excess power curve. Additionally, the curves depicted in Figure 25 show maximum
specific excess power being obtained at a speed which deviates slightly from Vy. These
two incongruities can be attributed to having used only three data points to generate
the curves, and the limitations of the graphing software (the software fits a smooth
curve through the three data points but is unable to decipher that the peak of the curve
should occur at Vy). These discrepancies however, do not adversely affect the accuracy
of the curves due to the negligible difference between the slope of the backside of the
curves depicted and actual specific excess power curves, and the specific excess power
being relatively constant (curve being relatively flat) at speeds around Vy.

51
4.1.2 Steady-Level Decelerations
Figure 26 below shows the specific excess power versus the calibrated airspeed in
the clean configuration for the four altitudes investigated.
Figure 26: Ps Curves for Clean Configuration Level-Decelerations
The figure above shows that decreases in Ps (become more negative) as the altitude
increases when in the clean configuration. This is in line with the standard theory that
power required increases with increasing altitude. For the same indicated airspeed,
drag remains constant irrespective of a change in altitude, but at higher altitudes, that
same indicated airspeed results in a greater true airspeed. Given that power required is
the product of drag and true airspeed, the increase in power required with an increase
in altitude for the same IAS or CAS is evident. Given also that the power available is
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess vs CAS for Steady-Level Deceleration in Clean Configuration for Various
Altitudes1300 feet 5000 feet 7000 feet 3000 Feet

52
constant, effectively zero at idle power for all the altitudes, the increase in power
required will result in a greater deficit in power (more negative excess power).
Figure 27 below shows the specific excess power versus the calibrated airspeed in the
full flaps configuration for the four altitudes investigated.
Figure 27: Ps Curves for Full Flaps Configuration Level-Decelerations
The figure above shows that Ps is relatively equal for all the altitudes investigated in
the full flaps configuration, except for the 1300 feet run. The 1300 feet run is
considered an outlier due to the steepness of its slope when compared to the other three
altitudes investigated. The trend observed in Figure 26 differs slightly from the known
theory which states that the deficit in power should increase (specific excess power
become more negative) with an increase in altitude, due to the increase in power
required.
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration with Full Flaps for Various Altitudes
1300 feet 3000 feet 5000 feet 7000 feet

53
Figure 28 below shows the specific excess power versus calibrated airspeed at 1300
feet for the two flap configurations investigated.
Figure 28: Ps Curves for Level-Decelerations at 1300 feet
The figure above shows that the specific excess power decreased (became more
negative) when full flaps were deployed. It is noted that the steepness of the slope for
1300 full flaps run is very high when compared to other runs, which is a factor of
concern for the accuracy of the data collected during this run.
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 1300 feet
Clean Config Full Flaps

54
Figure 29 below shows the specific excess power versus calibrated airspeed at 3000
feet for the two flap configurations investigated.
Figure 29: Ps Curves for Level-Decelerations at 3000 feet
The figure above shows that Ps decreased (became more negative) when the flaps
were fully deployed at 3000 feet.
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 3000 feet
Clean Config Full Flaps

55
Figure 30 below shows the specific excess power versus calibrated airspeed at 5000
feet for the two flap configurations investigated.
Figure 30: Ps Curves for Level-Decelerations at 5000 feet
The figure above shows that Ps decreased (became more negative) when the flaps
were fully deployed at 5000 feet.
-2000
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 5000 feet
Clean Config Full Flaps

56
Figure 31 below shows the specific excess power versus calibrated airspeed at 7000
feet for the two flap configurations investigated.
Figure 31: Ps Curves for Level-Decelerations at 7000 feet
The figure above shows that Ps decreased (became more negative) when the flaps
were fully deployed at 7000 feet.
All the four figures (Figures 28-31) show a decrease in Ps for the full flap configuration
when compared with the clean configuration. This is quite in line with the known
theory that flap deployment increases the zero-lift drag (parasite) and the induced drag,
hence increasing the total drag of the aircraft and resulting in a subsequent upward
movement in the power required curve. Given that the power available curve remains
constant, approximately zero, the difference will be greater (larger negative) between
the power available and power required curves for the full flap configuration.
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 7000 feet
Clean Config Full Flaps

57
For all the level deceleration test runs, the RPM slowly wound down throughout the
test run from 2700 RPM to about 800 RPM as the aircraft approached stall, due to
windmilling effects. The nature of the level deceleration procedure resulted in the
backsides (low-speed end) of all the power curves presented in this section being non-
existent, making it difficult to make any further inferences such as best glide speed. It
was therefore determined that constant speed glides would be a more appropriate
method to collect power deficit (negative specific excess power) data. Additionally, it
appears that the docile nature of the backside of the power curve for the Piper Warrior
contributed to its non-existence during the level deceleration runs.

58
4.2 Comparison to POH
Table 8: Comparison between POH Values and Measured Values
Pressure
Altitude [feet]
Ps (POH)
[ft/min]
Ps (Data)
[ft/min]
Vy (POH)
[IAS]
Vy (Data)
[IAS]
1300 574[1] 530 79 80
3000 475 470 79 79
5000 376 410 79 79
7000 277 250 79 78
[1] POH value taken for 1000 feet.
There were some slight variations observed between the results obtained during the
test program and the POH values. The maximum specific excess power values
measured were lower than those values posted in the POH, except for the 5000-feet
point. In addition, the Vy values measured were within 1 KIAS of the POH posted
values for all the altitudes investigated.
These variations can be attributed to the differences in the test procedures used to
obtain the POH values and those used in this test program. The POH procedures call
for leaning the mixture per Lycoming instructions, while the mixture was set to full
rich for all test points flown in this test program. The mixture being set at full rich
results in less engine power and lower aircraft performance, particularly at higher
altitudes. Additionally, this test program utilized level accelerations to determine
climb performance data, while the POH climb performance data were generated from
constant-speed climbs.

59
4.3 Ps Plots (𝒅𝒉
𝒅𝒕) component included
The following section, Section 4.3, displays the Ps plots for all the runs with the 𝑑ℎ
𝑑𝑡
component included. The purpose of including the 𝑑ℎ
𝑑𝑡 component was to try to
increase the accuracy the of Ps values obtained for every run. However, while decent
models of altitude versus time were created, the rate data obtained were merely
approximations and subjected to significant error, especially when flying through
unstable air masses. Additionally, the lag in the data collection, i.e. the time difference
between the aircraft changing altitude and that altitude change actually being recorded
on the Garmin display, also introduced significant uncertainty when calculating the 𝑑ℎ
𝑑𝑡
component. Lastly, analysis of all the test runs conducted revealed that the pilot
maintained the aircraft within ±50 feet of the target, further increasing the confidence
in the accuracy of the data that assumed the 𝑑ℎ
𝑑𝑡 component to be zero. Therefore, the
following figures presented in this section were only analyzed for trend data for
comparison with their counterparts that did not include 𝑑ℎ
𝑑𝑡 component, and as a result,
do not include an elaborate description of any specific findings.
All the trends observed in section 4.1 were confirmed by the data presented in this
section. The inclusion of the 𝑑ℎ
𝑑𝑡 component did not change the shape of the level
acceleration graphs, but altered the absolute specific excess power value measured at
each indicated airspeed. However, it must be noted that the inclusion of the
𝑑ℎ
𝑑𝑡 component made the backside (low-speed) end of some of the level deceleration

60
test runs more visible, particularly in the case of the full flaps runs. Hence, from the
test runs where the low-speed end was visible, it was possible to determine that the
best glide speed in the clean configuration was around 75 KIAS, within 2 KIAS of the
POH posted value of 73 KIAS.
4.3.1 Steady-Level Accelerations
Figure 32: Ps Curves for Clean Configuration Level-Accelerations (𝒅𝒉
𝒅𝒕≠ 𝟎)
0
100
200
300
400
500
600
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration in Clean Configuration for Various
Altitudes [(𝑑ℎ/𝑑𝑡) component included]
1300 feet 3000 feet 5000 feet 7000 feet

61
Figure 33: Ps Curves for Full Flaps Configuration Level-Accelerations (𝒅𝒉
𝒅𝒕≠ 𝟎)
Figure 34: Ps Curves for Level-Accelerations at 1300 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
0
50
100
150
200
250
300
350
40.0 50.0 60.0 70.0 80.0 90.0 100.0
Ps
(ft/
min
)
CAS (kts)
Specfic Excess Power vs CAS for Steady-Level Acceleration with Full Flaps for Various Altitudes
[(𝑑ℎ/𝑑𝑡) component included]1300 feet 3000 feet 5000 feet 7000 feet
0
100
200
300
400
500
600
40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration at 1300 feet [(𝑑ℎ/𝑑𝑡) component
included]
Clean Config Full Flaps

62
Figure 35: Ps Curves for Level-Accelerations at 3000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
Figure 36: Ps Curves for Level-Accelerations at 5000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
0
50
100
150
200
250
300
350
400
450
40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration at 3000 feet [(𝑑ℎ/𝑑𝑡) component
included]Clean Config Full Flaps
0
50
100
150
200
250
300
350
400
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration at 5000 feet [(𝑑ℎ/𝑑𝑡) component
included]Clean Config Full Flaps

63
Figure 37: Ps Curves for Level-Accelerations at 7000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
0
50
100
150
200
250
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Acceleration at 7000 feet
Clean Config Full Flaps

64
4.3.2 Steady-Level Decelerations
Figure 38: Ps Curves for Clean Configuration Level-Decelerations (𝒅𝒉
𝒅𝒕≠ 𝟎)
-2000
-1500
-1000
-500
0
40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration in Clean Configuration for Various
Altitudes [(𝑑ℎ/𝑑𝑡) component included]1300 feet 3000 feet 5000 feet 7000 feet

65
Figure 39: Ps Curves for Full Flaps Configuration Level-Decelerations (𝒅𝒉
𝒅𝒕≠ 𝟎)
Figure 40: Ps Curves for Level-Decelerations at 1300 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
-3000
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration with Full Flaps for Various Altitudes
[(𝑑ℎ/𝑑𝑡) component included]
1300 feet 3000 feet 5000 feet 7000 feet
-2000
-1800
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
40.0 60.0 80.0 100.0 120.0 140.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 1300 Feet [(𝑑ℎ/𝑑𝑡) component
included]Clean Config Full Flaps

66
Figure 41: Ps Curves for Level-Decelerations at 3000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
Figure 42: Ps Curves for Level-Decelerations at 5000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 3000 Feet
Clean Config Full Flaps
-3000
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 5000 Feet
Clean Config Full Flaps

67
Figure 43: Ps Curves for Level-Decelerations at 7000 feet (𝒅𝒉
𝒅𝒕≠ 𝟎)
-2500
-2000
-1500
-1000
-500
0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0
Ps
(ft/
min
)
CAS (kts)
Specific Excess Power vs CAS for Steady-Level Deceleration at 7000 Feet
Clean Config Full Flaps

68
Section 5 Conclusions and Future Work
5.1 Conclusions
The purpose of this research was to investigate the effects of altitude and flap position
on the specific excess power for Part 23 aircraft for implementation into an energy
management system. The PA-28-161 was a fair representation of a typical Level 2
airplane under Part 23 classifications, given its single normally aspirated engine and
fixed-gear.
The steady-level acceleration data showed that there was an inverse linear relationship
between specific excess power and altitude for both configurations investigated, with
altitude having an identical effect on the aircraft in both the clean configuration and
full flaps configuration. The data also showed an inverse linear relationship between
altitude and maximum level flight speed for both configurations investigated, with
altitude also having an identical effect on the aircraft in both the clean configuration
and full flaps configuration. Furthermore, an inverse linear relationship between
altitude and best rate of climb speed (Vy) was observed for both configurations
investigated. However, it was noted that the change in Vy with respect to altitude in
both the configurations was quite negligible that Vy could be considered constant for
the respective configurations from sea-level to service ceiling. Lastly, it was observed
that altitude had no effect on the indicated/calibrated stall speed of the aircraft for both
configurations investigated.

69
A combination of these three linear relationships, along with other basic assumptions,
were used to successfully manipulate the sea-level baseline specific excess power
curve (created from data posted in the POH) to derive altitude specific excess power
curves. Though the linear relationships used in this derivation were obtained through
flight tests, it was determined that similar relationships were easily obtained through
reduction of data already posted in the POH or AFM. The effect of temperature was
not considered in this study but is easily determined from temperature data already
presented in POHs and AFMs and would further increase the accuracy of the model.
Given the impracticability of flight testing every aircraft that this energy management
system is likely to be implemented on, the method of creating the basic energy model
from data already available in the POH or AFM appears to be superior.
Flap configuration appeared to have no effect on the altitude relationships, i.e. the
altitude relationships for the full flaps configuration and the altitude relationships for
the clean configuration were identical (slight variation attributed to random error).
Hence, it was determined that computed altitude relationships from the clean
configuration data already posted in the POH or AFM would also accurately represent
the altitude relationships for the full flaps configuration. However, these relationships
would only become useful if a sea-level baseline for the full flaps configuration curve
was available; a curve that would have to be obtained through flight test, given that
the data to produce such a curve is seldom posted in POHs or AFMs.
Therefore, an attempt was made to establish relationships between the clean
configuration and full flaps configuration in order to be able to model the full flaps
70
specific excess power curve from the clean configuration curve. It was found that the
full flaps configuration maximum specific excess power was 200 ft/min less than the
clean configuration (maximum specific excess power was obtained when flying at Vy
for the respective configurations). Additionally, it was found that the maximum level
flight speed that the aircraft could attain was 32.5 KCAS less in the full flaps
configuration than in the clean configuration. Furthermore, the best rate of climb speed
(Vy) in the full flaps configuration was 18 KCAS lower than the best rate of climb of
speed in the clean configuration.
A combination of these three relationships (which are in fact constants, given that there
are no variables in the respective equations), along with the power-on stall speed in
the landing configuration obtained from the POH, were used to derive the full flaps
configuration specific excess power curves from the clean configuration curves. Given
that the altitude relationships for both the clean configuration and full flaps
configuration were identical, and the full flaps from clean configuration relationships
are independent of these altitude relationships, the two sets of relationships can be
used in any order to obtain full flaps configuration specific excess power curves at a
specific altitude. Though the resulting derived curves accurately represented the
aircraft’s specific excess power in the full flaps configuration at the designated
altitude, the relationships obtained may however, only be applicable to the PA-28-161.
Furthermore, parameters such as flap area, flap deflection and flap type will all
influence the relationships between the clean configuration and the full flaps
configuration. Again, noting the impracticability of flight testing every aircraft that the

71
energy management system is likely to be installed on, an analytical method using data
that are readily available in the POH or AFM would be more ideal. This analytical
method can then be substantiated by flight tests.
The steady-level acceleration specific excess power curves which included the 𝑑ℎ
𝑑𝑡
component, confirmed the trend values observed in the specific excess power curves
which assumed the 𝑑ℎ
𝑑𝑡 component to be zero. Further analysis of the steady-level
acceleration specific excess power curves that included the 𝑑ℎ
𝑑𝑡 component was not
conducted, due to a lack of confidence in the accuracy of the 𝑑ℎ
𝑑𝑡 components calculated.
The steady-level deceleration test runs did not generate useful data due to the RPM
winding down throughout the test run because of windmilling effects, resulting in the
low-speed end of the specific excess power curves being non-existent. The inclusion
of the 𝑑ℎ
𝑑𝑡 component made the low-speed end of the specific excess power curve more
visible for some test runs but was unable to rectify the issue to a point where the data
became usable.
All the maximum specific excess power values measured through the steady-level
accelerations in the clean configuration were within 10% of the POH posted values for
the respective altitudes investigated. The measured best rate of climb speed was within
1 KIAS of the POH posted value for the respective altitudes investigated. The best
glide speed was estimated from the clean configuration steady-level deceleration data
with the 𝑑ℎ
𝑑𝑡 component included (3000-feet test run was not included, as the low-speed

72
end was still not apparent) to be approximately 75 KIAS. This value was only 2 KIAS
greater than the POH posted value of 73 KIAS.
It is envisaged that the data gathered in this flight test study will be a valuable addition
to the body of knowledge towards the development of an accurate energy state
management and warning system, which will hopefully contribute to increasing the
safety in General Aviation.

73
5.2 Recommendations and Future Works
Though the steady-level accelerations were able to generate a body of useful data for
determining the specific excess power envelope, data near the low-speed end (near
stall) was a bit more dispersed. Furthermore, the steady-level decelerations did not
produce as expected, usable data, particularly near the low-speed end. Performing
constant speed climbs and constant speed idle power descents would alleviate both
these issues and result in more accurate data being generated. Maintaining constant
speed and RPM through the descent would also allow for the assumption of constant
thrust to be more accurate. For aircraft with the capability, feathering the propeller
would be most ideal. The increased accuracy of the data would directly affect the
accuracy of the relationships developed for implementation into the energy
management system. Important to note however, is that performing constant speed
climbs and idle power descents would significantly increase the amount of flight test
time required.
The flight tests will also need to be corrected for maximum gross weight, as this is
most critical for performance, and will also be highly applicable to takeoff operations
where the aircraft is operated very close to maximum gross weight. Though most other
operations are not conducted at maximum gross weight, erring on the side of caution
will only serve to increase the margin of safety.
Most general aviation aircraft do not have a binary flap system like what was assumed
in this flight test program, but instead have an intermediate flap configuration between

74
fully retracted and fully extended. Furthermore, pilots often incrementally extend their
flaps during the approach and landing phase and in certain conditions choose to land
with flaps at an intermediate position as opposed to fully extended. Therefore, a further
investigation into flap position that considers intermediate flap positions should be
conducted to develop trends that can further increase the accuracy and applicability of
the energy management system. Additionally, parameters such as flap area, flap
deflection and flap type all differ for various aircraft types and will significantly affect
the relationships between the full flaps configuration and the clean configuration.
Analysis of these parameters and their respective effects should be conducted to obtain
accurate relationships for all aircraft that this energy management system may be
applicable to.
The PA-28-161 Warrior is an aircraft equipped with a single normally aspirated engine
and fixed-pitch two-bladed propeller. Though this aircraft is representative of most of
the General Aviation aircraft population, there are certain subtle differences among
aircraft that give rise to variations in the specific excess power curve. Investigations
into the effects of turbocharging, multi-engine versus single engine, constant-speed
propellers vs fixed pitch propellers and number of propeller blades (mainly three-
bladed vs two-bladed, as very few general aviation aircraft have more than a three-
bladed propeller) will be required to further develop an understanding of specific
excess power as it pertains to GA aircraft.
The specific excess power data obtained revealed that most general aviation aircraft
do not have enough performance to recover from low energy states. When on the

75
backside of the power curve, throttle advancement is very often not enough to return
the aircraft to the region of normal control. The aircraft often needs to also trade
altitude for airspeed to recover from the region of reversed control. Unfortunately,
when in the traffic pattern, the aircraft has little to no altitude to trade with, making it
impossible to safely recover from a low energy state. Given the difficulty associated
with recovering from a low energy state, more attention should be paid to measures
and methods that will assist the pilot in becoming more aware and avoiding situations
in which the aircraft gets to a low energy state. The implementation of this energy
management system is viewed as one way to increase pilot awareness. Other areas
identified that will require further research or measures to address them include:
• The perception of many General Aviation pilots that stall recovery is of higher
importance than stall prevention, which is highly contrary to the thinking of
their Commercial counterparts who have a much better safety record as it
pertains to LOC incidents.
• The implementation of a Defined Minimum Maneuvering Speed for general
aviation aircraft. Maneuvering Speed is often a maximum airspeed limitation
that the aircraft designer selects to protect the aircraft from structural damage,
particularly when referring to GA aircraft. On the commercial side, there is a
maximum maneuvering speed for structural integrity, but there is also a
minimum maneuvering airspeed for stall/spin protection. Pilots are not allowed
to perform maneuvers unless above this designated airspeed, which gives them
enough margin for the effective increase in stall speed because of maneuvering.

76
References
[1] “Fly Safe: Prevent Loss of Control Accidents,” FAA seal Available:
https://www.faa.gov/news/updates/?newsId=91285.
[2] “Loss of Control in General Aviation” Available:
https://www.easa.europa.eu/sites/default/files/dfu/Loss of Control in General Aviation -
update 17112016- sourcedoc-final_0.pdf.
[3] “NTSB News Release National Transportation Safety Board Office of Public
Affairs,” National Transportation Safety Board (NTSB) Available:
https://www.ntsb.gov/news/press-releases/Pages/nr20180419.aspx.
[4] “14 CFR § 23.2150 - Stall characteristics, stall warning, and spins.,” Legal Information
Institute Available: https://www.law.cornell.edu/cfr/text/14/23.2150.
[5] Merkt, J. R., “Flight Energy Management Training: Promoting Safety and
Efficiency,” Journal of Aviation Technology and Engineering, vol. 2, 2013, pp. 24–36. [6]
Anderson, J. D. (2007). Introduction to flight (3rd ed.). New York: McGraw-Hill.
[7] “Law of conservation of energy,” Law of conservation of energy - Energy
Education Available:
https://energyeducation.ca/encyclopedia/Law_of_conservation_of_energy.
[8] Iata, “Loss of Control In-flight (LOC-I),” IATA Available:
https://www.iata.org/whatwedo/safety/Pages/loss-of-control-inflight.aspx.
[9] Hermelin, S., “14 fixed wing fighter aircraft- flight performance - ii,” LinkedIn
SlideShare Available: https://www.slideshare.net/solohermelin/14-fixed-wing-fighter-
aircraft-flight-performance-ii.
[10] Tejas Puranik, Hernando Jimenez, and Dimitri Mavris. "Energy-Based Metrics for Safety
Analysis of General Aviation Operations", Journal of Aircraft, Vol. 54, No. 6 (2017),
pp. 2285-2297.
[11] “2016 General Aviation Statistical Databook & 2017 Industry Outlook,” 2016 General
Aviation Statistical Databook & 2017 Industry Outlook.

77
[12] “KMLB - Melbourne International Airport,” AirNav Available:
http://www.airnav.com/airport/KMLB.
[13] jezzc100 Epic Poster Join Date: May 2010 Posts: 161, and colin Bristol Instructor Join
Date: Jul 2004 Posts: 2741, “Announcement,” Q845 - ATP Forum Available:
http://www.atpforum.eu/forum/technical-subjects/-032-performance-a/13177-q845.
[14] “What Does Altitude Have To Do With Vx And Vy?,” Online Flight Training Courses
and CFI Tools Available: https://www.boldmethod.com/learn-to-fly/performance/vx-vy-
altitude-and-where-they-meet/.
[15] Piper Aircraft. (1982). Warrior II. PA-28-161 Pilot’s Operating Handbook. Vero
Beach.

78
Appendix A: Flight Test Data
Figure 44: CAS vs Time 1300 feet Clean Level-Acceleration (First 15s)
Figure 45: CAS vs Time 1300 feet Clean Level-Acceleration (16s to end of run)
y = -0.017493x3 + 0.417240x2 - 0.563237x + 104.456023
0
20
40
60
80
100
120
140
0 2 4 6 8 10 12 14 16
CAS (ft/s)
Time(s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration
y = -0.012799x2 + 2.046088x + 110.742407
0
50
100
150
200
250
0 20 40 60 80 100
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

79
Figure 46: Pressure Altitude vs Time 1300 feet Clean Level-Acceleration
Figure 47: CAS vs Time 1300 feet Clean Level-Deceleration
1310
1320
1330
1340
1350
1360
1370
1380
1390
0 20 40 60 80 100
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration in Clean Configuration
y = 0.004483x3 - 0.209290x2 - 0.833868x + 200.249928
0.0
50.0
100.0
150.0
200.0
250.0
0 10 20 30 40 50
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration in Clean Configuration

80
Figure 48: Pressure Altitude vs Time 1300 feet Clean Level-Deceleration
Figure 49: CAS vs Time 1300 feet Full Flaps Level-Acceleration (First 20s)
1230
1240
1250
1260
1270
1280
1290
1300
1310
1320
1330
0 10 20 30 40 50
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration in Clean Configuration
y = -0.003011x2 + 1.642984x + 86.239804
0
20
40
60
80
100
120
140
0 5 10 15 20 25
CAS (ft/s)
Time(s)
CAS vs Time for Steady-Level Acceleration with Full Flaps

81
Figure 50: CAS vs Time 1300 feet Full Flaps Level-Acceleration (21s to end of run)
Figure 51: Pressure Altitude vs Time 1300 feet Full Flaps Level-Acceleration
y = -0.008510x2 + 1.383397x + 93.674850
0
20
40
60
80
100
120
140
160
0 10 20 30 40 50 60 70 80
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps
1325
1330
1335
1340
1345
1350
1355
1360
1365
1370
1375
1380
0 10 20 30 40 50 60 70 80
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration with Full Flaps

82
Figure 52: CAS vs Time 1300 feet Full Flaps Level-Deceleration
Figure 53: Pressure Altitude vs Time 1300 feet Full Flaps Level-Deceleration
y = -0.000310x3 + 0.103927x2 - 5.701329x + 174.884341
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
200.0
0 5 10 15 20 25 30
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration with Full Flaps
1290
1300
1310
1320
1330
1340
1350
1360
1370
1380
1390
1400
0 5 10 15 20 25 30
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration with Full Flaps

83
Figure 54: CAS vs Time 3000 feet Clean Level-Acceleration (First 15s)
Figure 55: CAS vs Time 3000 feet Clean Level-Acceleration (16s to end of run)
y = -0.015918x3 + 0.343597x2 - 0.040683x + 103.505812
0
20
40
60
80
100
120
140
0 2 4 6 8 10 12 14 16
CA
S (f
t/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration
y = -0.009799x2 + 1.828338x + 101.449748
0
50
100
150
200
0 20 40 60 80 100 120
CA
S (f
t/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

84
Figure 56: Pressure Altitude vs Time 3000 feet Clean Level-Acceleration
Figure 57: CAS vs Time 3000 feet Clean Level-Deceleration
3035
3040
3045
3050
3055
3060
3065
3070
3075
3080
3085
0 20 40 60 80 100 120
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration in Clean Configuration
y = 0.001843x3 - 0.058100x2 - 2.994848x + 193.568149
0.0
50.0
100.0
150.0
200.0
250.0
0 5 10 15 20 25 30 35
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration in Clean Configuration

85
Figure 58: Pressure Altitude vs Time 3000 feet Clean Level-Deceleration
Figure 59: CAS vs Time 3000 feet Full Flaps Level-Acceleration (First 10s)
3005
3010
3015
3020
3025
3030
3035
3040
0 5 10 15 20 25 30 35
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration in Clean Configuration
y = -0.027297x3 + 0.525523x2 - 1.371995x + 84.420055
82
84
86
88
90
92
94
96
98
0 2 4 6 8 10 12
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps

86
Figure 60: CAS vs Time 3000 feet Full Flaps Level-Acceleration (11s to end of run)
Figure 61: Pressure Altitude vs Time 3000 feet Full Flaps Level-Acceleration
y = -0.013559x2 + 1.782137x + 77.371168
0
20
40
60
80
100
120
140
160
0 10 20 30 40 50 60 70
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps
3040
3050
3060
3070
3080
3090
3100
0 10 20 30 40 50 60 70
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration with Full Flaps

87
Figure 62: CAS vs Time 3000 feet Full Flaps Level-Deceleration
Figure 63: Pressure Altitude vs Time 3000 feet Full Flaps Level-Deceleration
y = 0.063029x2 - 5.723643x + 185.348937
0
20
40
60
80
100
120
140
160
180
200
0 5 10 15 20 25
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration with Full Flaps
3060
3070
3080
3090
3100
3110
3120
3130
0 5 10 15 20 25
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration with Full Flaps

88
Figure 64: CAS vs Time 5000 feet Clean Level-Acceleration (First 15s)
Figure 65: CAS vs Time 5000 feet Clean Level-Acceleration (16s to end of run)
y = -0.008796x3 + 0.276752x2 - 1.325591x + 103.710624
100
102
104
106
108
110
112
114
116
118
0 2 4 6 8 10 12 14 16
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration
y = -0.011001x2 + 2.000559x + 85.755057
0
50
100
150
200
0 20 40 60 80 100
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

89
Figure 66: Pressure Altitude vs Time 5000 feet Clean Level-Acceleration
Figure 67: CAS vs Time 5000 feet Clean Level-Deceleration
5060
5065
5070
5075
5080
5085
5090
5095
5100
5105
5110
5115
0 20 40 60 80 100
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration in Clean Configuration
y = 0.006237x3 - 0.246603x2 - 0.858512x + 181.399473
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
200.0
0 5 10 15 20 25 30
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration in Clean Configuration

90
Figure 68: Pressure Altitude vs Time 5000 feet Clean Level-Deceleration
Figure 69: CAS vs Time 5000 feet Full Flaps Level-Acceleration (First 10s)
5020
5025
5030
5035
5040
5045
5050
5055
0 5 10 15 20 25 30
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration in Clean Configuration
y = -0.051555x3 + 0.778783x2 - 1.487541x + 85.170807
82
84
86
88
90
92
94
96
98
0 2 4 6 8 10 12
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps

91
Figure 70: CAS vs Time 5000 feet Full Flaps Level-Acceleration (11s to end of run)
Figure 71: Pressure Altitude vs Time 5000 feet Full Flaps Level-Acceleration
y = -0.004741x2 + 0.844114x + 87.108259
0
20
40
60
80
100
120
140
0 10 20 30 40 50 60 70 80
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps
5070
5080
5090
5100
5110
5120
5130
5140
0 10 20 30 40 50 60 70 80
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration with Full Flaps

92
Figure 72: CAS vs Time 5000 feet Full Flaps Level-Deceleration
Figure 73: Pressure Altitude vs Time 5000 feet Full Flaps Level-Deceleration
y = 0.005564x3 - 0.146537x2 - 3.112515x + 169.016219
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
0 5 10 15 20 25
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration with Full Flaps
5040
5050
5060
5070
5080
5090
5100
5110
5120
5130
0 5 10 15 20 25
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration with Full Flaps

93
Figure 74: CAS vs Time 7000 feet Clean Level-Acceleration (First 15s)
Figure 75: CAS vs Time 7000 feet Clean Level-Acceleration (16s to end of run)
y = -0.004921x3 + 0.144418x2 - 0.601938x + 104.286912
103
104
105
106
107
108
109
110
111
112
0 2 4 6 8 10 12 14 16
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration
y = -0.005535x2 + 1.327343x + 91.673797
0
20
40
60
80
100
120
140
160
180
0 20 40 60 80 100
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration in Clean Configuration

94
Figure 76: Pressure Altitude vs Time 7000 feet Clean Level-Acceleration
Figure 77: CAS vs Time 7000 feet Clean Level-Deceleration
7075
7080
7085
7090
7095
7100
7105
7110
7115
7120
7125
7130
0 20 40 60 80 100
Hp (ft)
Time (s)
Hp vs Time for Steady-Leevel Acceleration in Clean Configuration
y = 0.004516x3 - 0.168619x2 - 1.120222x + 170.389097
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
0 5 10 15 20 25 30
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration in Clean Configuration

95
Figure 78: Pressure Altitude vs Time 7000 feet Clean Level-Deceleration
Figure 79: CAS vs Time 7000 feet Full Flaps Level-Acceleration (First 15s)
7060
7070
7080
7090
7100
7110
7120
7130
0 5 10 15 20 25 30
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Deceleration in Clean Configuration
y = -0.003352x3 + 0.079165x2 - 0.079427x + 85.347633
85
86
87
88
89
90
91
92
0 2 4 6 8 10 12 14 16
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps

96
Figure 80: CAS vs Time 7000 feet Full Flaps Level-Acceleration (16s to end of run)
Figure 81: Pressure Altitude vs Time 7000 feet Full Flaps Level-Acceleration
y = -0.001828x2 + 0.545812x + 82.039767
0
20
40
60
80
100
120
0 20 40 60 80 100
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Acceleration with Full Flaps
7085
7090
7095
7100
7105
7110
7115
7120
0 20 40 60 80 100
Hp (ft)
Time (s)
Hp vs Time for Steady-Level Acceleration with Full Flaps

97
Figure 82; CAS vs Time 7000 feet Full Flaps Level-Deceleration
Figure 83: Pressure Altitude vs Time 7000 feet Full Flaps Level-Deceleration
y = 0.012838x3 - 0.426130x2 - 0.388082x + 165.621163
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
0 5 10 15 20 25 30
CAS (ft/s)
Time (s)
CAS vs Time for Steady-Level Deceleration with Full Flaps
7020
7040
7060
7080
7100
7120
7140
7160
7180
7200
0 5 10 15 20 25 30
Hp (ft)
Time (s)
Hp vs Time for Steady-level Deceleration with Full Flaps
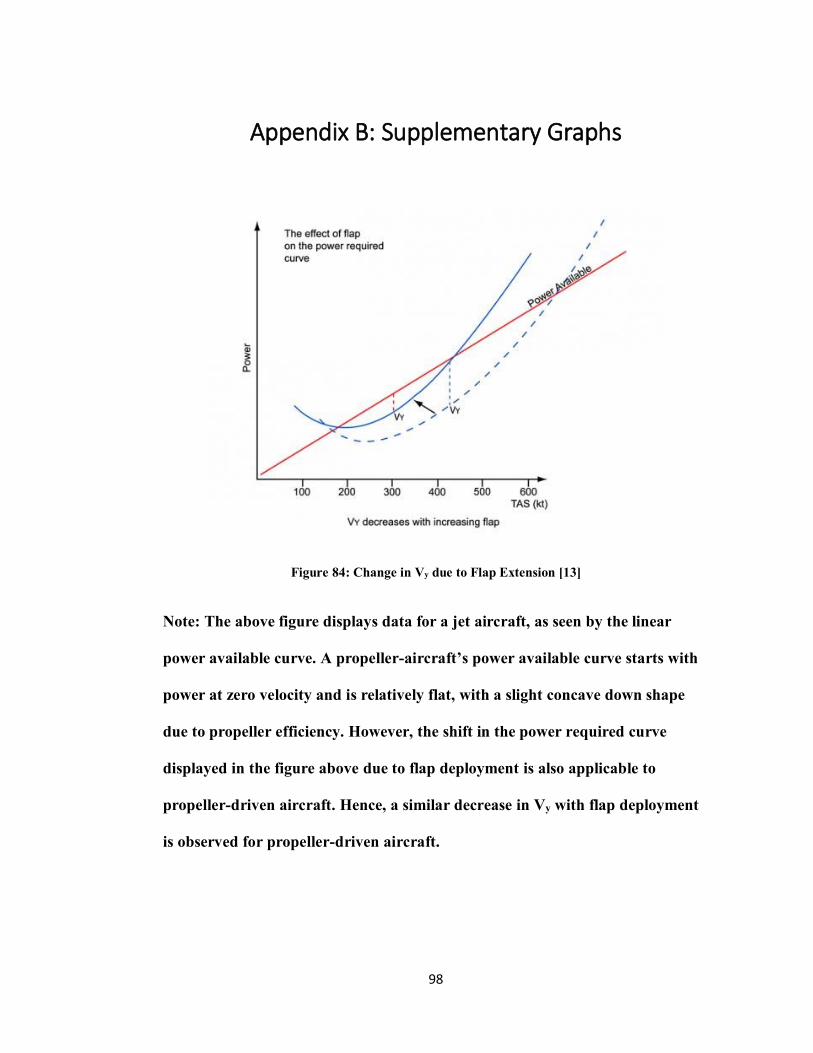
98
Appendix B: Supplementary Graphs
Figure 84: Change in Vy due to Flap Extension [13]
Note: The above figure displays data for a jet aircraft, as seen by the linear
power available curve. A propeller-aircraft’s power available curve starts with
power at zero velocity and is relatively flat, with a slight concave down shape
due to propeller efficiency. However, the shift in the power required curve
displayed in the figure above due to flap deployment is also applicable to
propeller-driven aircraft. Hence, a similar decrease in Vy with flap deployment
is observed for propeller-driven aircraft.

99
Figure 85: Altitude Effect on Vy [14]


















