Introduction To Modeling Dynamics: Automotive Applications · Introduction To Modeling Dynamics:...
31
Introduction To Modeling Dynamics: Automotive Applications Joe DeRose Powertrain NVH R&D Ford Motor Company G. DeRose Jr. / GDEROSE 4/7/2009 Not job 1 representative. Hardcopies are uncontrolled.
Transcript of Introduction To Modeling Dynamics: Automotive Applications · Introduction To Modeling Dynamics:...
Introduction To Modeling Dynamics: Automotive Applications
Joe DeRosePowertrain NVH R&DFord Motor Company
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 2
Overview
• Introduction To Rigid Body Dynamics Modeling
• Applications
• Advanced Applications
• CAE Challenges
• Summary
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 3
Introduction
• Education– Michigan State University
• B.S. Mechanical Engineering, 1993• B.S. Computer Science, 1993• M.S. Mechanical Engineering, 1996• Ph.D. Mechanical Engineering, 1998
– Large scale topology optimization
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 4
Introduction
• Work Experience– Ford Motor Company, 1999 to present
• Powertrain NVH Research and Development– Cross functional optimization
• Vehicle Dynamics– Development– CAE
• Durability and NVH CAE Development– Cross functional optimization– CAE method development
– Engineering consultant
– Adjunct faculty in ME at LTU

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 5
Rigid Body Dynamics Modeling
• Goal– Represent a physical system with an
analytical model– Analytical model consists of a collection of
rigid bodies and building blocks

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 6
Rigid Body Dynamics Modeling
• General concepts– Rigid bodies
• Mass, CG and inertia
– Constraints• Revolute, spherical, etc…
– Connectors• Springs and dampers
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 7
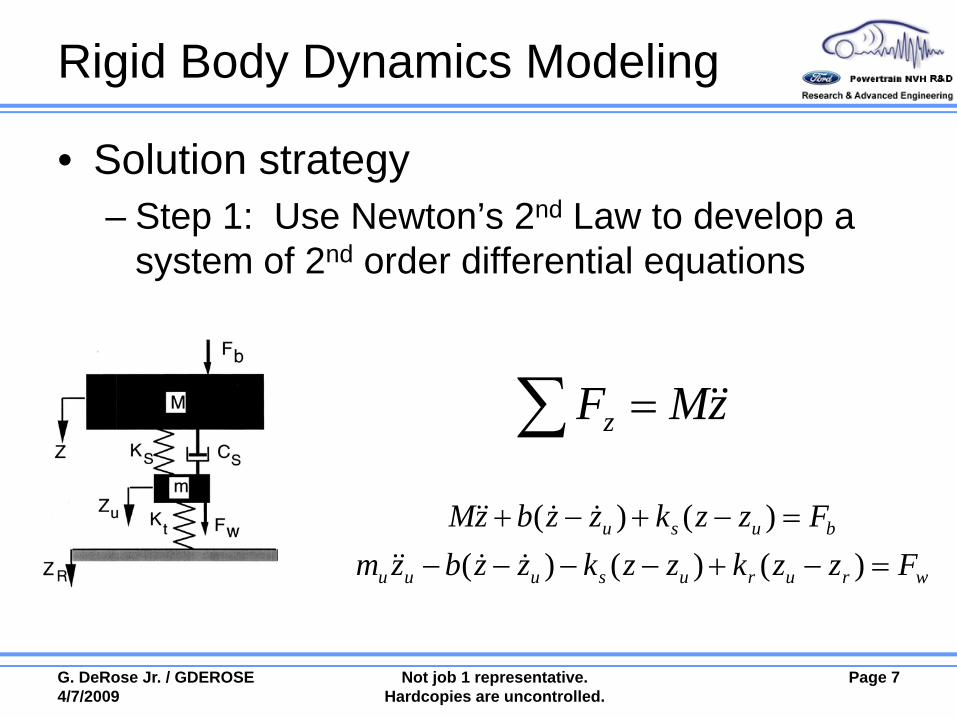
Rigid Body Dynamics Modeling
• Solution strategy– Step 1: Use Newton’s 2nd Law to develop a
system of 2nd order differential equations
wrurusuuu
busu
FzzkzzkzzbzmFzzkzzbzM
=−+−−−−=−+−+
)()()()()(
&&&&
&&&&
∑ = zMFz &&
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 8
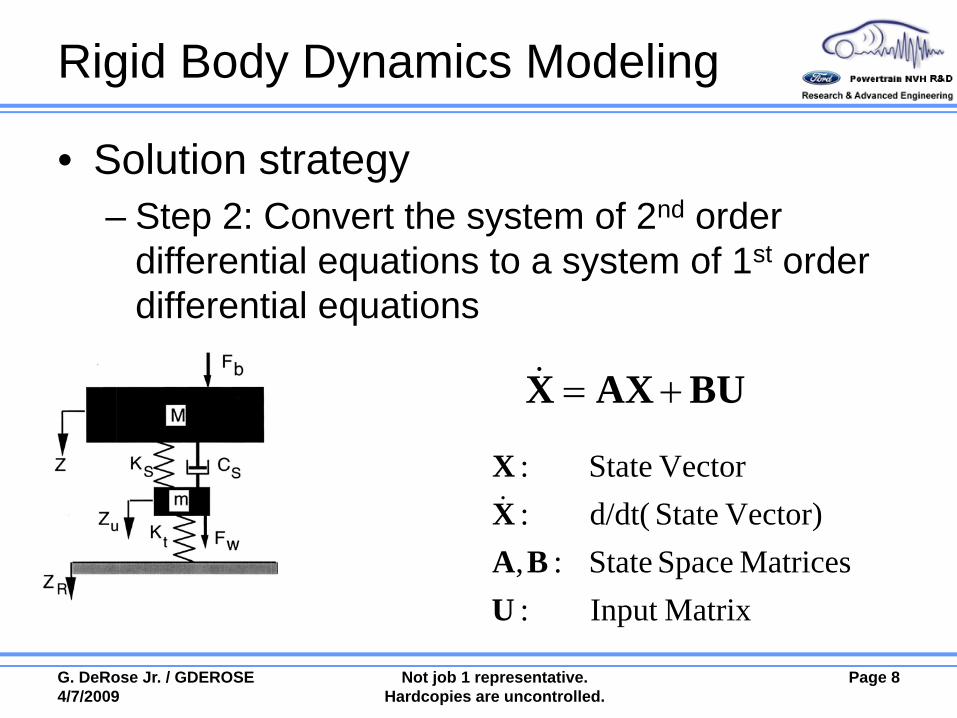
Rigid Body Dynamics Modeling
• Solution strategy– Step 2: Convert the system of 2nd order
differential equations to a system of 1st order differential equations
BUAXX +=&
MatrixInput :Matrices Space State:,
Vector) State d/dt(:Vector State:
UBA
XX&
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 9
Rigid Body Dynamics Modeling
• Solution strategy– Step 3: Determine a numerical solution to the
system of 1st order differential equations
– Available tools• Matlab / Simulink / Maple / MathCAD• Classical Numerical Methods• ADAMS• veDYNA• LMS Virtual Lab / DADS

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 10
Rigid Body Dynamics Modeling
• Quarter-car model– Sinusoidal road input (0.1m @ 1.0 Hz)– Time response
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 11
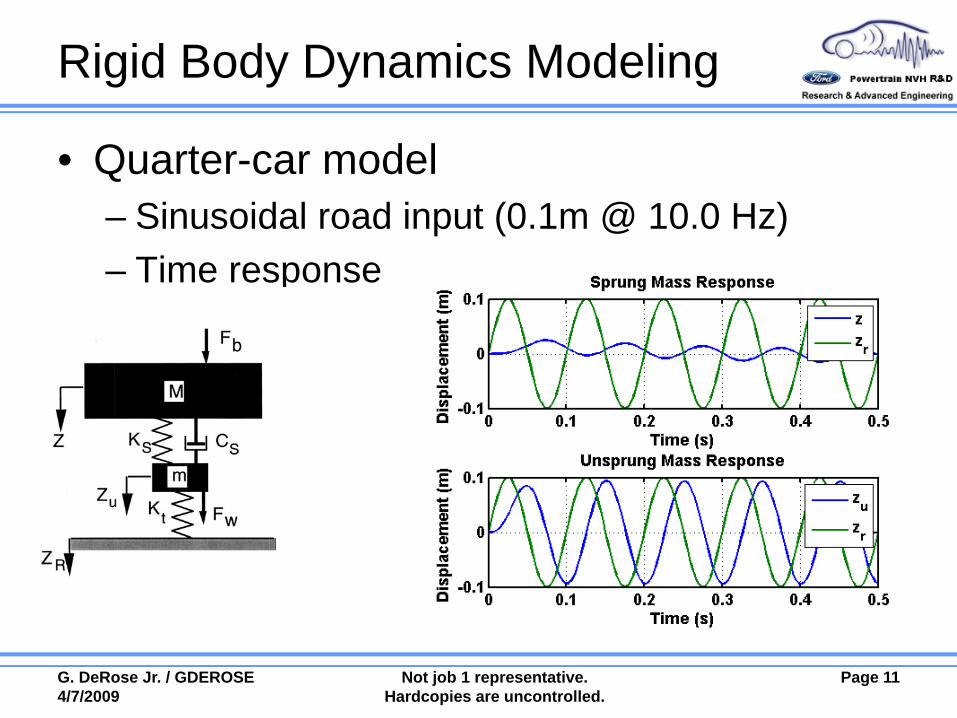
Rigid Body Dynamics Modeling
• Quarter-car model– Sinusoidal road input (0.1m @ 10.0 Hz)– Time response
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 12
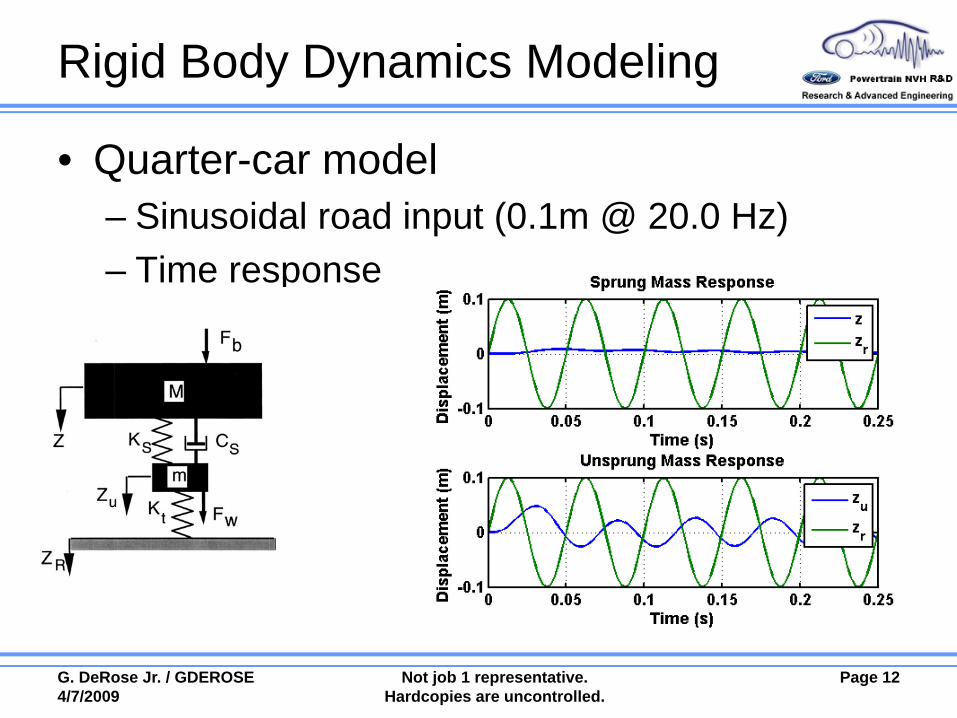
Rigid Body Dynamics Modeling
• Quarter-car model– Sinusoidal road input (0.1m @ 20.0 Hz)– Time response
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 13
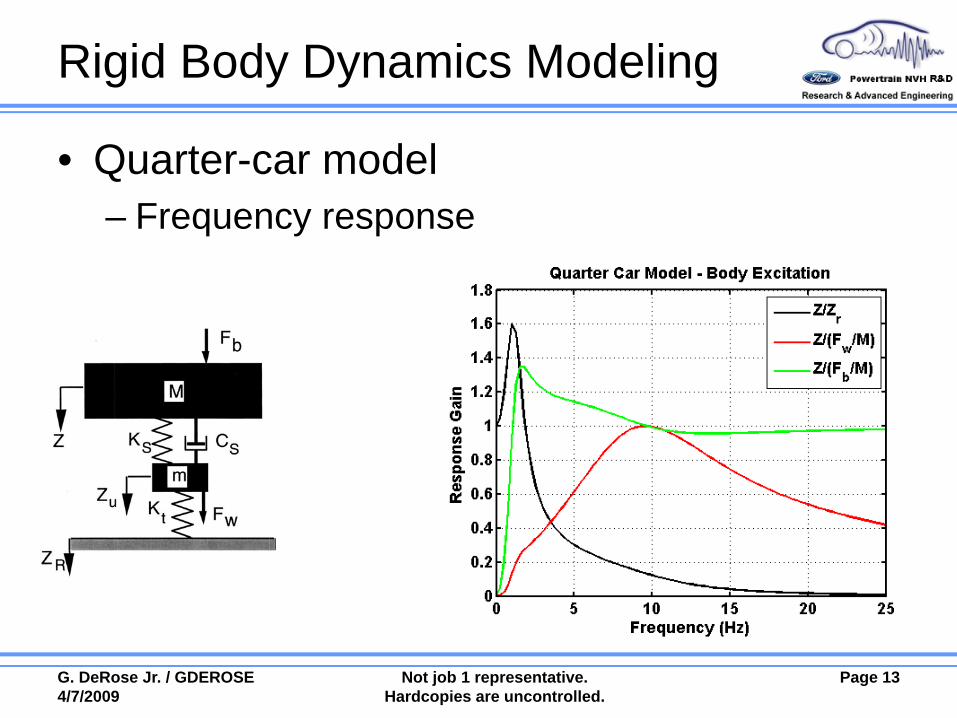
Rigid Body Dynamics Modeling
• Quarter-car model– Frequency response
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 14
Rigid Body Dynamics Modeling
• Use analytical model to– Predict dynamic response– Investigate parameter sensitivity– Optimize
• Benefits– $$$: CAE modeling not prototypes– Design evaluations– Six sigma, robustness and reliability
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 15
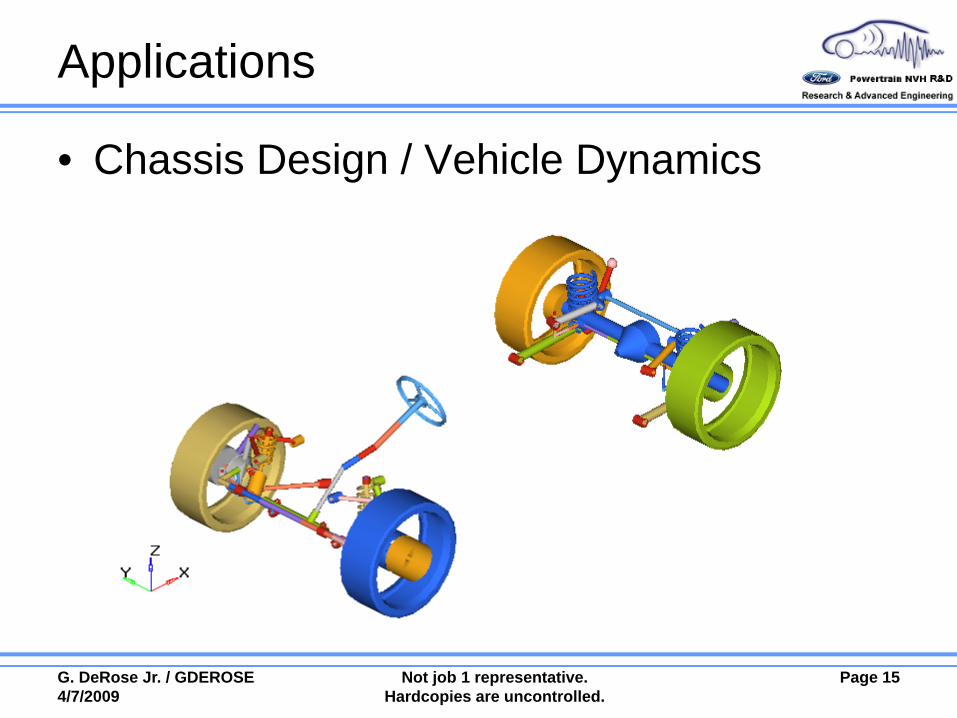
Applications
• Chassis Design / Vehicle Dynamics
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 16
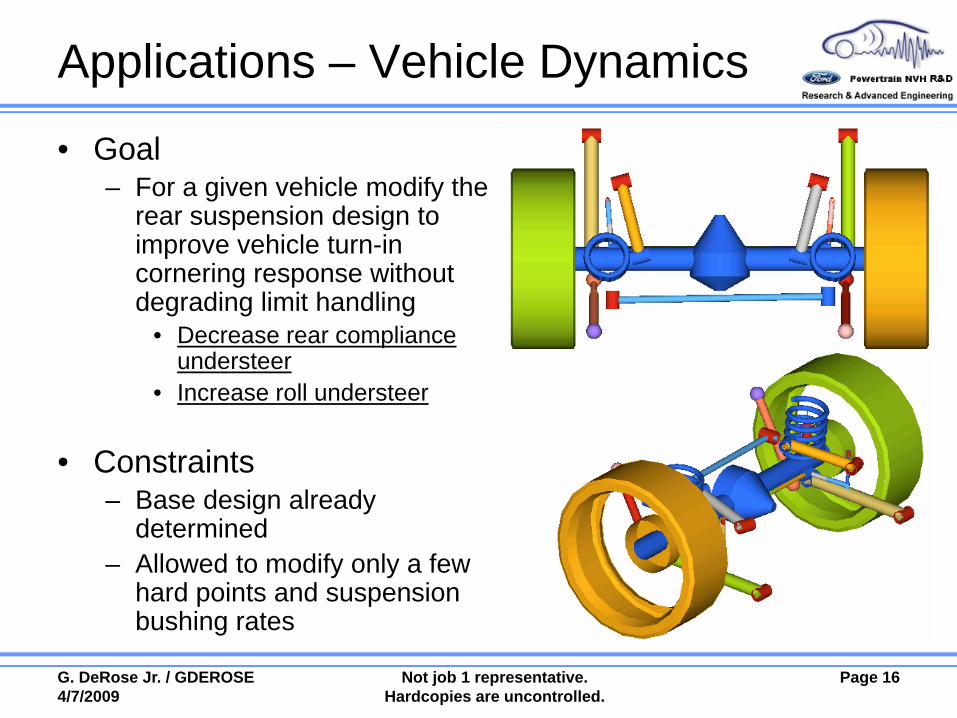
Applications – Vehicle Dynamics
• Goal– For a given vehicle modify the
rear suspension design to improve vehicle turn-in cornering response without degrading limit handling
• Decrease rear compliance understeer
• Increase roll understeer
• Constraints– Base design already
determined– Allowed to modify only a few
hard points and suspension bushing rates
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 17
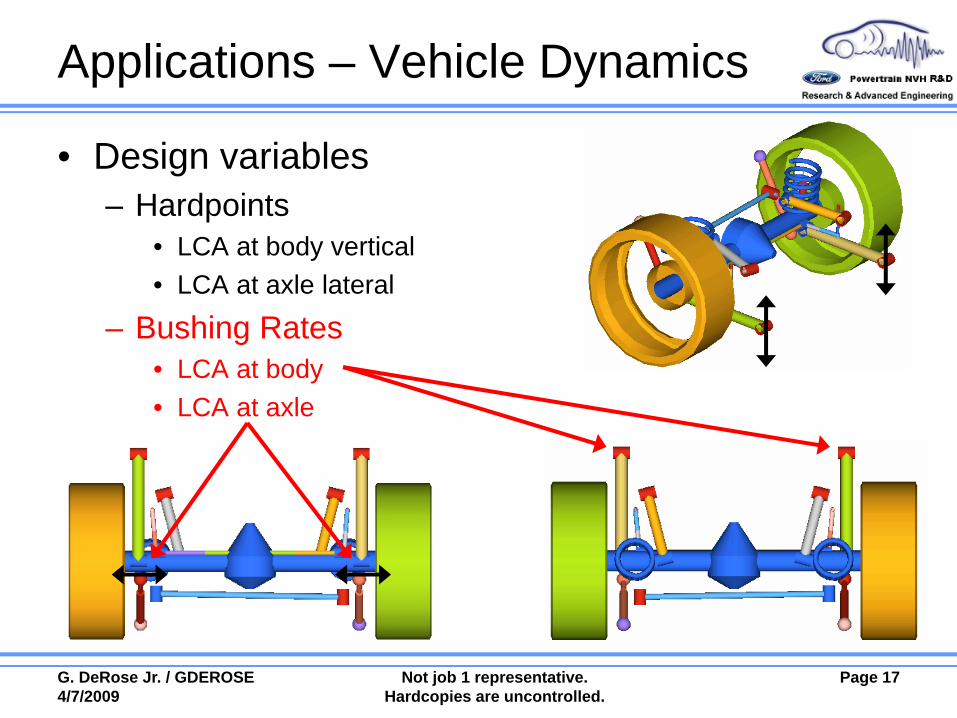
Applications – Vehicle Dynamics
• Design variables– Hardpoints
• LCA at body vertical• LCA at axle lateral
– Bushing Rates• LCA at body• LCA at axle

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 18
Applications – Vehicle Dynamics
• Solution method– Design of Experiments (DOEs)
• Systematic/mathematical methods for the investigation of processes and systems
– Planning and conducing experiments– Analyzing results
– DOEs Goals• Design space exploration• Identify parameter sensitivities• Optimize design
– Often associated with Response Surface Methodology (RSM)
• Develop a surrogate model
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 19
Applications – Vehicle Dynamics
• Design of experiments phases– Phase 0: Screening experiment
• Determine which parameters are important and unimportant• Often investigate large range of variables
– Phase 1: Initial response surface• Determine if the ranges of the design variables are
appropriate
– Phase 2: Optimization (with RSM)• Focus on tighter ranges of the design variables (operability
region) and optimize

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 20
Applications – Vehicle Dynamics
• Example response surfaces
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 21
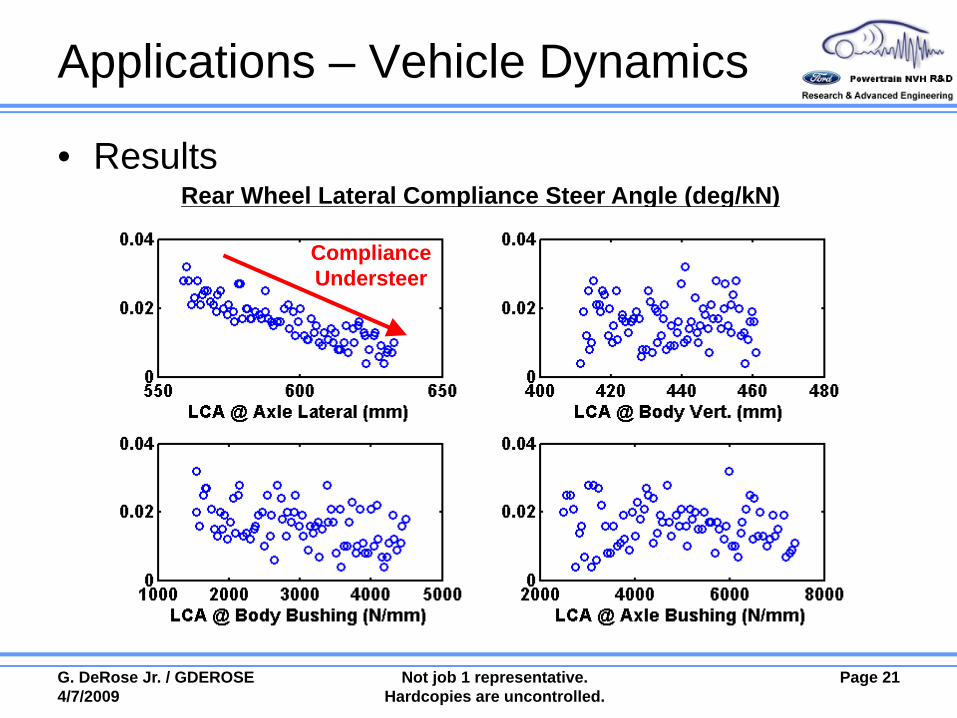
Applications – Vehicle Dynamics
• ResultsRear Wheel Lateral Compliance Steer Angle (deg/kN)
Compliance Understeer
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 22
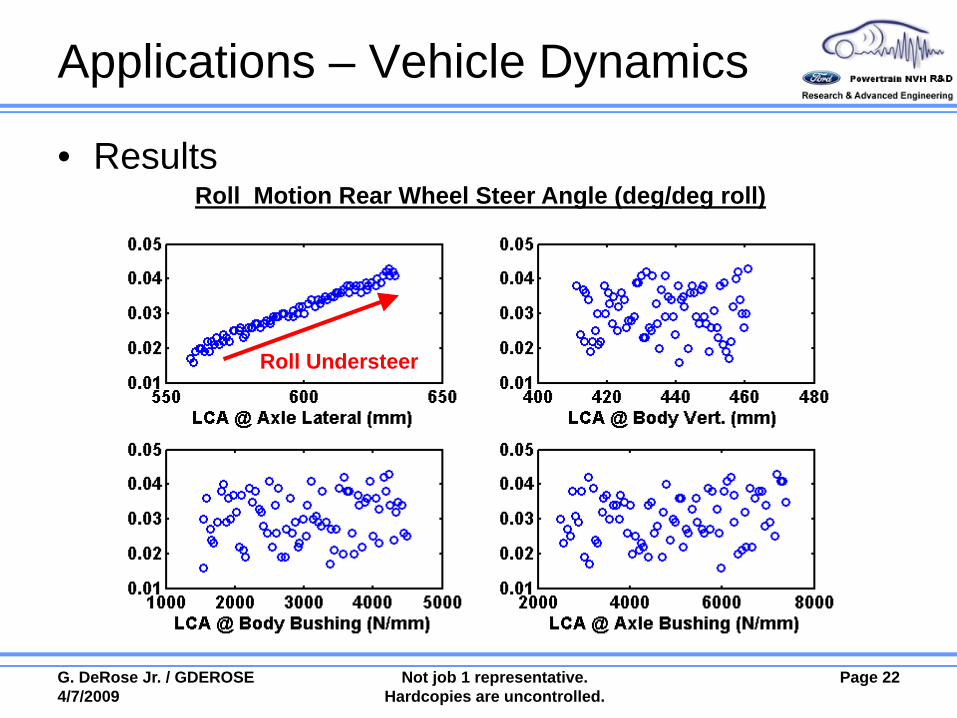
Applications – Vehicle Dynamics
• ResultsRoll Motion Rear Wheel Steer Angle (deg/deg roll)
Roll Understeer

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 23
Applications – Vehicle Dynamics
• Summary– Lower control arm to rear axle hardpoint most
significant factor in achieving the desired response
– Design of Experiments• Successfully implemented to identify relevant
parameters• Design variable sensitivities found requiring
minimal design time
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 24
Applications – Vehicle Dynamics
• Vehicle dynamic response
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 25
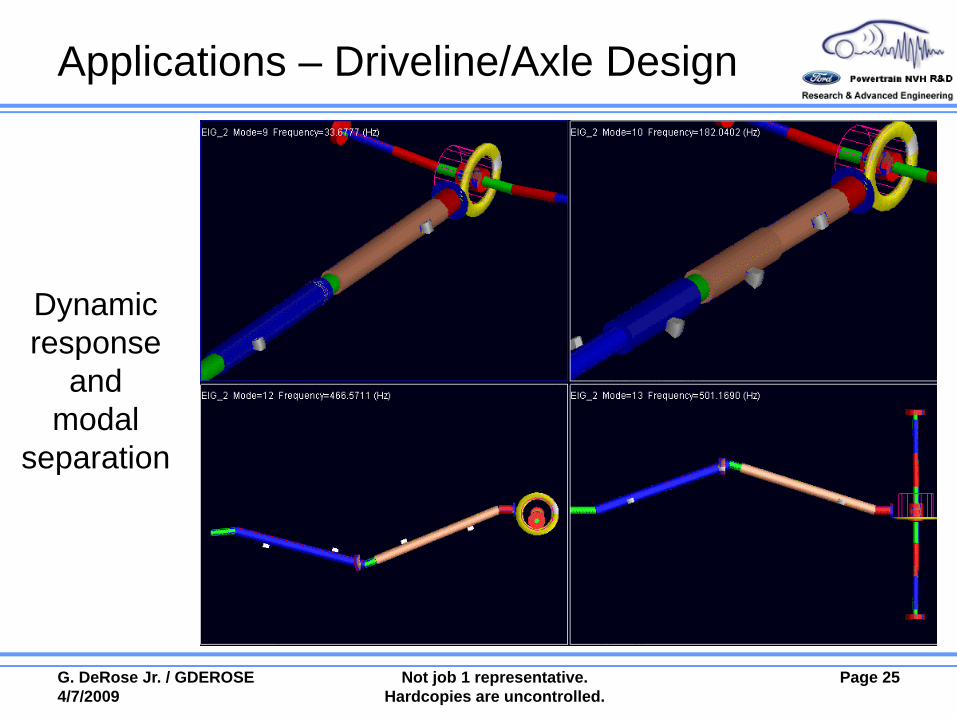
Applications – Driveline/Axle Design
Dynamic response
andmodal
separation
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 26
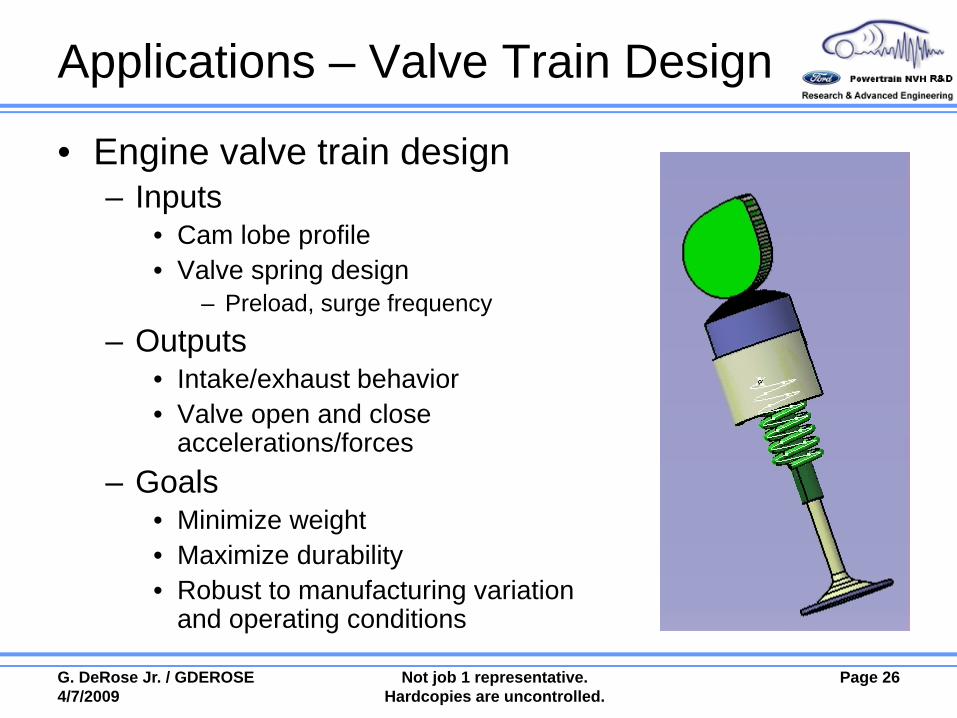
Applications – Valve Train Design
• Engine valve train design– Inputs
• Cam lobe profile• Valve spring design
– Preload, surge frequency
– Outputs• Intake/exhaust behavior• Valve open and close
accelerations/forces– Goals
• Minimize weight• Maximize durability• Robust to manufacturing variation
and operating conditions

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 27
Advanced Applications
• Differential gear contact stresses and noise (flexible bodies)
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 28
Advanced Applications
• Vehicle dynamics with control systems
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 29
Advanced Applications
• Vehicle dynamics with control systems

G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 30
CAE Challenges
• Simulations versus real life…
G. DeRose Jr. / GDEROSE4/7/2009
Not job 1 representative.Hardcopies are uncontrolled.
Page 31
Summary
• Go State!
• Rigid body dynamics and system response– Time domain and frequency important
• Rigid body dynamics applications– Vast, companies need help…
• Advanced applications– Growth area
• CAE challenges– Solutions needed, applicants apply