
Introduction to Mobile Robotics Error...
14
Slides by Kai Arras Last update: June 2010 1 Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras Error Propagation Introduction to Mobile Robotics
Transcript of Introduction to Mobile Robotics Error...

Slides by Kai Arras
Last update: June 2010 1
Wolfram Burgard, Cyrill Stachniss, Maren
Bennewitz, Giorgio Grisetti, Kai Arras
Error Propagation
Introduction to Mobile Robotics

2
• Probabilistic robotics is • Representation • Propagation • Reduction of uncertainty
• First-order error propagation is fundamental for: Kalman filter (KF), landmark extraction, KF-based localization and SLAM
Error Propagation: Motivation

3
First-Order Error Propagation
Approximating f(X) by a first-order Taylor series expansion about the point X = µX

4
First-Order Error Propagation
X,Y assumed to be Gaussian
Y = f(X)
Taylor series expansion
Wanted: , (Solution on blackboard)

5
Y = f(X1, X2, ..., Xn)
Taylor series expansion
Wanted: , (Solution on blackboard)
First-Order Error Propagation

6
First-Order Error Propagation
Y = f(X1, X2, ..., Xn)
Z = g(X1, X2, ..., Xn)
Wanted:
(Exercise)
7
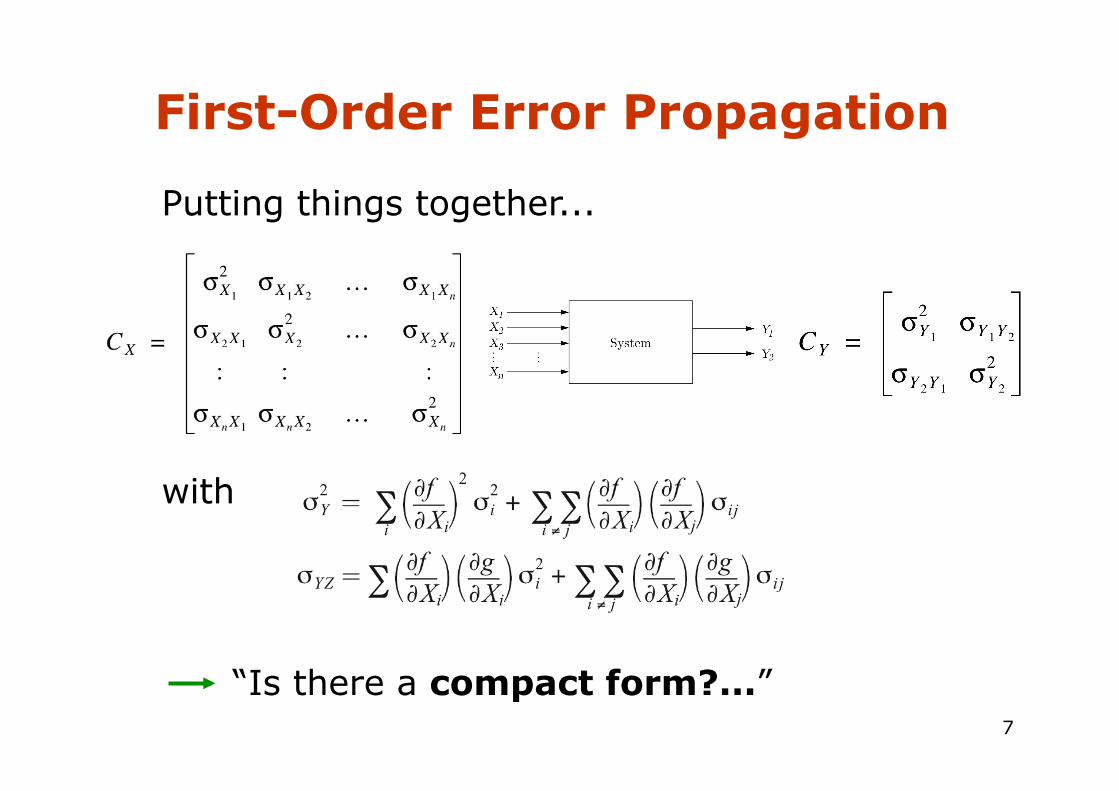
First-Order Error Propagation
Putting things together...
with
“Is there a compact form?...”

8
Jacobian Matrix
• It’s a non-square matrix in general
• Suppose you have a vector-valued function
• Let the gradient operator be the vector of (first-order) partial derivatives
• Then, the Jacobian matrix is defined as

9
• It’s the orientation of the tangent plane to the vector-valued function at a given point
• Generalizes the gradient of a scalar valued function
• Heavily used for first-order error propagation...
Jacobian Matrix

10
First-Order Error Propagation
Putting things together...
with
“Is there a compact form?...”

11
First-Order Error Propagation
...Yes! Given
• Input covariance matrix CX
• Jacobian matrix FX
the Error Propagation Law
computes the output covariance matrix CY

12
First-Order Error Propagation
Alternative Derivation:

Wanted: Parameter Covariance Matrix
Simplified sensor model: all , independence
Result: Gaussians in the model space
13
Example: Line Extraction

14
• Second-Order Error Propagation
Rarely used (complex expressions)
• Monte-Carlo
Non-parametric representation of uncertainties
1. Sampling from p(X)
2. Propagation of samples
3. Histogramming
4. Normalization
Other Error Prop. Techniques

![Error HandlingPHPMay-2007 : [#] PHP Error Handling.](https://static.fdocuments.net/doc/165x107/5515d289550346dd6f8b46d1/error-handlingphpmay-2007-php-error-handling.jpg)
















