Introduction to Manifolds - Roland van der Veenrolandvdv.nl/M18/Syllabus.pdfChapter 1 Introduction...
63
Introduction to Manifolds Roland van der Veen 2018
Transcript of Introduction to Manifolds - Roland van der Veenrolandvdv.nl/M18/Syllabus.pdfChapter 1 Introduction...

Introduction to Manifolds
Roland van der Veen
2018

2

Contents
1 Introduction 51.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 How to solve equations? 72.1 Linear algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Derivative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Intermediate and mean value theorems . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Implicit function theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Is there a fundamental theorem of calculus in higher dimensions? 233.1 Elementary Riemann integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2 k-vectors and k-covectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 (co)-vector fields and integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3.1 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.4 More on cubes and their boundary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.5 Exterior derivative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.6 The fundamental theorem of calculus (Stokes Theorem) . . . . . . . . . . . . . . . . 403.7 Fundamental theorem of calculus: Poincare lemma . . . . . . . . . . . . . . . . . . . 42
4 Geometry through the dot product 454.1 Vector spaces with a scalar product . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.2 Riemannian geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 What if there is no good choice of coordinates? 515.1 Atlasses and manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.2 Examples of manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.3 Analytic continuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.4 Bump functions and partitions of unity . . . . . . . . . . . . . . . . . . . . . . . . . 585.5 Vector bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.6 The fundamental theorem of calculus on manifolds . . . . . . . . . . . . . . . . . . . 625.7 Geometry on manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3

4 CONTENTS

Chapter 1
Introduction
1.1 Overview
The goal of these notes is to explore the notions of differentiation and integration in a setting wherethere are no preferred coordinates. Manifolds provide such a setting.
This is not calculus.We made an attempt to prove everything we say so that no black boxes have to be accepted on
faith. This self-sufficiency is one of the great strengths of mathematics. Sometimes mathematicstexts start by giving answers neglecting to properly state the questions they were meant to answer.We will try motivate concepts and illustrate definitions. In turn the reader is asked to at least trysome of the exercises. Doing exercises (and possibly failing some) is an integral part of mathematics.
At the beginning of the Dutch national masters program in mathematics there is a one day’intensive reminder on manifolds’ course that consists the following topics:
1. definition of manifolds*,
2. tangent and cotangent bundles*,
3. vector bundles*,
4. differential forms and exterior derivative*,
5. flows and Lie derivative,
6. Cartan calculus,
7. integration and Stokes theorem*.
8. Frobenius theorem
Since this is an introductory course we only treat the topics marked *. To illustrate our techniqueswe will touch upon some concepts in Riemannian, complex and symplectic geometry.
More systematically these lecture notes consist of five chapters the first of which is this intro-duction. In chapter two we start by studying non-linear systems of equations by approximatingthem by linear ones, leading to the implicit function theorem. Basically it says that the solution
5

6 CHAPTER 1. INTRODUCTION
set looks like the graph of a function in good cases. Along the way we develop a suitably generalnotion of derivative. The corresponding notion of integration is developed in the next chapter. Thisis more involved as it requires defining new kinds of objects as the natural integrands (covectorfields, differential forms). Differntiation and integration are connected by a generalization of thefundamental theorem of calculus (Stokes theorem) and the Poincare lemma. In chapter four webriefly explore how our techniques are useful in setting up various kinds of geometry. In the finalchapter we will show how to lift all the theory we developed so far to the context of manifolds.Basically a manifold is just several pieces of Rn linked by coordinate transformations. Given thatwe set up our theory in a way that makes coordinate tranformations easy to deal with, most localaspects of the theory are no different from the way they are in Rn.
Most of the material is standard and can be found in references such as Calculus on manifoldsby M. Spivak or Introduction to smooth manifolds. However the proofs presented here are simplifiedand streamlined significantly. This especially goes for the proof of the implicit function theoremand the change of variables theorem for integrals and the Poincare lemma. I tried to motivate theuse of exterior calculus more than usual, while limiting its algebraic preliminaries.
Throughout the text I try to write functions as A 3 a f7−→ a2 + a+ 1 ∈ B, instead of f : A→ Bdefined by f(a) = a2 + a+ 1.
Acknowledgement. Much of this material is presented in a way inspired by the work of myformer master student Jules Jacobs. I would also like to thank Kevin van Helden for his helpfulcomments, exercises and excellent teaching assistance over the years.

Chapter 2
How to solve equations?
Postponing the formal definition until chapter 5, manifolds often arise as solution sets to equations.In this preliminary chapter we explore under what conditions a system of n real equations in k+ nvariables can be solved. Naively one may hope that each equation can be used to determine avariable so that in the end k variables are left undetermined and all others are functions of those.For example consider the two systems of two equations on the left and on the right (k = 1, n = 2):
x+ y + z = 0 sin(x+ y)− log(1− z) = 0 (2.1)
−x+ y + z = 0 ey − 1
1 + x− z= 0 (2.2)
The system on the left is linear and easy to solve, we get x = 0 and y = −z. The system on the
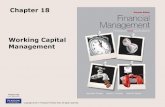
Figure 2.1: Solutions to the two systems. The yellow surface is the solution to the first equation,blue the second. The positive x, y, z axes are drawn in red, green, blue respectively.
7

8 CHAPTER 2. HOW TO SOLVE EQUATIONS?
Figure 2.2: Some random level sets.
right is hard to solve explicitly but looks very similar near (0, 0, 0) since sin(x + y) ∼= x + y andlog(1− z) ∼= −z near zero. We will be able to show that just like in the linear situation a curve ofsolutions passes through the origin. The key point is that the derivative of the complicated lookingfunctions at the origin is precisely the linear function shown on the left.
We will look at equations involving only differentiable functions. This means that locally theycan be approximated well by linear functions. The goal of the chapter is to prove the implicitfunction theorem. Basically it says that the linear approximation decides whether or not a systemof equations is solvable locally. This is illustrated in the figures above.
Later in the course solutions to equations will be an important source of examples of manifolds.Even the solution set to single equation in three unknowns can take many forms. See for examplefigure 2.2 where we generated random polynomial equations and plotted the solution set.
Exercises
Exercise 1. (Three holes)Give a single equation in three unknowns such that the solution set is a bounded subset of R3, lookssmooth and two-dimensional everywhere and has a hole. Harder: Can you increase the number ofholes to three?

2.1. LINEAR ALGEBRA 9
2.1 Linear algebra
The basis for our investigation of equations is the linear case. Linear equations can neatly besummarized in terms of a single matrix equation Av = b. Here v is a vector in Rk+n, and b ∈ Rnand A is an n× (k+n) matrix. In case b = 0 we call the equation homogeneous and the solution setis some linear subspace S = v ∈ Rk+n|Av = 0, the kernel of the map defined by A. In general,given a single solution p ∈ Rk+n such that Ap = b the entire solution set v ∈ Rk+n|Av = b is theaffine linear subspace S + p = s+ p|s ∈ S.
In discussing the qualitative properties of linear equations it is more convenient to think in termsof linear maps. Most of this material should be familiar from linear algebra courses but we give afew pointers here to establish notation and emphasize the important points. With some irony, thefirst rule of linear algebra is YOU DO NOT PICK A BASIS, the second rule of linear algebra isYOU DO NOT PICK A BASIS.
In this section W,V will always be real vector spaces of finite dimensions m and n. Of courseW is isomorphic to Rm and choosing such an isomorphism b : Rm → W means choosing a basis.Usually we write ei for the standard basis of Rm and abbreviate b(ei) = bi. We may then writevectors w ∈W as w =
∑i w
ibi. However we do not want to pin ourselves down on a specific basissince that makes it harder to switch between various interpretations of W as a space of directions,complex numbers or linear transformations, holomorphic functions and so on.
A relevant example is the set of all linear maps from V to W is denoted L(V,W ), it is a vectorspace in its own right. If we would set V = Rn and W = Rm then ϕ ∈ L(V,W ) could be describedby a matrix ϕij defined by ϕej =
∑i ϕ
ijei. However the matrix might look easier with respect to
another basis so we prefer to keep the V,W abstract and describe ϕ using bases c : Rn → V andb : Rm →W . With respect to these bases the matrix of ϕ ∈ L(V,W ) is defined to be (b−1 ϕ c)ij .So ϕcj =
∑i ϕ
ijbi.
An important special case of the previous is the dual space V ∗ = L(V,R). Evaluation gives a
bilinear map V ∗ × V 3 (f, v)ev7−→ f(v) ∈ R. In general a bilinear map B is called non-degenerate
if ∀f : B(f, v) = 0 implies v = 0 and ∀v : B(f, v) = 0 implies f = 0. In our case ev actually isnon-degenerate. This also allows us to set up a basis of (bi) of V ∗ dual to any basis (bi) of V by
requiring bi(bj) = δij . Here δij =
1 if i = j
0 if i 6= jis the Kronecker delta.
A useful feature of the dual space is the pull-back (also known as transpose). Given f ∈ L(V,W )there is a map called f∗ ∈ L(W ∗, V ∗) defined by f∗ϕ = ϕ f .
To better understand determinants we use Gaussian elimination to compute them. This can beimplemented by the elementary operations Rcij : Rn → Rn defined by Rcij = I + ceie
j for i 6= j. Wehave detRcij = 1 and for square matrix A the matrix ARcij is the result of adding c times column ito column j. Likewise RcijA is the result of adding c times row i to row j. Using these operationsit is possible to interchange two rows or columns (exercise!).
Lemma 1. (Gaussian elimination)Any n × n matrix A can be written as a product A = EDE where D is diagonal and E, E are
products of Rcij. In particular detA = detD.
Proof. Induction on the size n. For n = 1 this is clear. For the induction step we consider ann × n matrix A. Unless all entries in the final row and column are zero we may use elementaryoperations to make Ann 6= 0. In either case we can use more elementary operations to make all

10 CHAPTER 2. HOW TO SOLVE EQUATIONS?
off-diagonal entries in the final row and column equal to 0. By induction we can do the same forthe (n− 1)× (n− 1) block.
Just like one can compute with integers modulo n one can also compute with vectors modulosome subspace. Given subspace U ⊂ V this means that we compute with equivalence classes v = v′
mod U if v − v′ ∈ U . The result is again a vector space called the quotient vector space V/U .
Exercises
2.2 Derivative
Now that we understand linear functions, we would like to use this to study more general functions
Rm ⊃ Pf−→ Rn, where unless stated otherwise P is always a non-empty open subset of Rm. The
key idea is to locally approximate non-linear objects by linear ones. In this case at every pointp ∈ P we are looking for the linear map f ′(p) ∈ L(Rm,Rn) best approximating f close to p.
Since we are approximating, some specialized notation is useful. For functions Rm f,g−−→ Rn we
define f = o(g) to mean limh→0|f(h)||g(h)| = 0, intuitively f goes to zero faster than g. For example
eh− 1− h = o(h). We often use the triangle inequality to show that f = o(h) and g = o(h) impliesf + g = o(h) (Exercise!).
Although our notation may be a little unfamiliar, the picture is just like the familiar one-dimensional picture, see figure 2.3.
Figure 2.3: The derivative D at p is the linear map that best approximates to f at point p.
Definition 1. (Differentiability)
A map Rm ⊃ P f−→ Rn is called differentiable at p ∈ P if there exists a linear map D ∈ L(Rm,Rn)such that for any h ∈ Rm converging to 0:
f(p+ h) = f(p) +Dh+ εf,D,p(h) with εf,D,p(h) = o(h) (2.3)
When f is differentiable for all p ∈ P we say f is differentiable.

2.2. DERIVATIVE 11
For example take R2 3 (x, y)f7−→ x2 − y2 ∈ R and p = (0, 1). In this case we may take
D ∈ L(R2,R) to be given by the matrix (0,−2) with respect to the standard bases. To see thatthis works we set h = (k, `) and show that the error εf,D,p(h) = f(p+ h)− f(p)− f ′(p)(h) goes tozero faster than h does.
εf,D,p(h) = f(k, `+ 1)− f(0, 1)− 2` = k2 − (`+ 1)2 + 1 + 2` = k2 − `2
So as promised|εf,D,p(h)||h| = |k2−`2|
|√k2+`2| ≤
|k2+`2|√k2+`2
= |h|. Taking the limit h → 0 shows D satisfies
equation (2.3).Provided it exists, the linear approximation D above is actually unique. It therefore deserves a
special name, the derivative of f at p or f ′(p).
Definition 2. (Derivative)If f is differentiable at p then the derivative of f at p called f ′(p) ∈ L(Rm,Rn) is the unique linearmap satisfying (2.3).
Proof. (Of uniqueness). Suppose we have another A ∈ L(Rm,Rn) also satisfies (2.3). Subtractingthese two equations gives (D − A)h = εf,A,p(h) − εf,D,p(h) = o(h). Setting h = tw with w ∈ Rm
and t ∈ R non-zero shows that limt→0(D−A)wt
t = 0 so that D = A.
For functions R f−→ R our definition of derivative f ′(p) is just a complicated reformulation of theusual definition. Actually the matrix of the derivative with respect to the standard bases is just thematrix of partial derivatives. In the above example the linear mapD is just (∂f∂x (p), ∂f∂y (p)) = (0,−2).This and much more will follow from the next theorem.
Theorem 1. (Properties of derivative)
1. (Chain-rule). Given functions Rk ⊃ Qf−→ P ⊂ R` and R` ⊃ P
g−→ Rm differentiable at q ∈ Qand f(q) ∈ P we have (g f)′(q) = g′(f(q))f ′(q).
2. If f is constant then f ′ = 0.
3. If f ∈ L(Rk,R`) then f ′(q) = f for all q ∈ Rk.
4. For any basis (bi) of R` the function f =∑i fibi is differentiable at q if and only if the
component functions Pfi−→ R are, and in that case f ′(q)(v) =
∑i(fi)
′(q)(v)bi.
Proof. Part 1 (Chain rule). Set p = f(q). For the chain rule it suffices to show that the linear mapg′(p)f ′(q) ∈ L(R`,Rm) satisfies equation (2.3). We know that f(q + h) = p+ f ′(q)h+ εf,q(h) andg(p+ k) = g(p) + g′(p)k + εg,p(k). Combining those we can approximate (g f)(q + h) =
g(p+ f ′(q)h+ εf,q(h)) = g(p) + g′(p)k + εg,p(k) = g(p) + g′(p)f ′(q)h+ ε(gf),q(h)
where we set k = f ′(q)h + εf,q(h) and ε(gf),q(h) = g′(p)εf,q(h) + εg,p(k) = A + B. Now we needto show that ε(gf),q(h) = o(h) as h → 0. In fact A = o(h) and B = o(h). For A it follows fromthe differentiability of f and continuity of the linear map g′(p). For B we use differentiability of gto see that for any α > 0 we have |εg,p(k)| < αk whenever k is suitably small. So 1
|h| |εg,p(k(h))| <α 1|h| (f
′(q)h + εf,q(h)) < Cα for some constant C, showing that B(h) = o(h). Here we used
differentiability of f once more.

12 CHAPTER 2. HOW TO SOLVE EQUATIONS?
Part 2 follows directly from the definition and uniqueness of the derivative because by assump-tion: f(p+ h) = f(p) + 0h+ 0 and 0 = o(h).Part 3. For the same reason we may use linearity to write f(p+ h) = f(p) + f(h) + 0.Part 4. Suppose f is differentiable at p then by the chain rule (part 1) so is fi = πi f whereπi is projection onto the i-th basis vector bi (a linear map, using part 3). Conversely supposeall the functions fi are differentiable at p then fi(p + h) = fi(p) + fi
′(p)h + ε(fi, p, h). Nowf(p+h) =
∑i fi(p+h)bi =
∑i(fi(p)+fi
′(p)h+ε(fi, p, h))bi = f(p)+∑i fi′(p)hbi+
∑i ε(fi, p, h))bi.
Since∑i ε(fi, p, h) = o(h) we find that indeed f ′(p) =
∑i fi′(p)bi.
In some sense this is all we need to know about differentiation except perhaps the fact that theproduct is a differentiable function, see Exercise 1. Using the chain rule and our knowledge of the onevariable derivatives from calculus we are able to differentiate many complicated looking multivariate
functions step by step. For example: the function R2 ∈ (x, y)F7−→ (cos(xy), x3 + e−y) ∈ R2 can be
differentiated as follows. By part 4 we can do the components F1, F2 separately so let us focus oncomputing F ′1(a, b) for some (a, b) ∈ R2. Using the linear maps e1, e2 ∈ (R2)∗ forming the basis dualto the standard basis we may rewrite F1(x, y) = cos (e1 · e2) so F ′1(a, b) = cos′(ab)(e1 · e2(a, b) +e1(a, b) · e2) = − sin(ab)(be1 + ae2). In other words, F ′1(a, b)(x, y) = − sin(ab)(bx+ ay).
A slightly different way of thinking about derivatives is in terms of directional derivatives.
Definition 3. (Directional derivative)
Given Rm ⊃ P F−→ Rn we define the directional derivative of F at p ∈ P in direction w ∈ Rm as
∂wF (p) = limt→0
F (p+ tw)− F (p)
t
In case w = ej the directional derivative is known as the j-th partial derivative.
Assuming F ′(p) exists and setting ιw : R → Rm given by ιw(t) = p + wt connects our twonotions of derivatives. From the chain rule and parts 2,3 we see ∂wF (p) = (F ιw)′(0) = F ′(p)w.In particular, this means that when it exists, the matrix of F ′(p) with respect to the standardbases ei is just the matrix of partial derivatives: F ′(p)ij = ∂Fi
∂xj(p). In section 2.3 we will see how
directional derivatives even shed light on the existence of F ′, see lemma 2.Provided they exist for all relevant points we may consider the directional derivatives as functions
in their own right and attempt to differentiate them. This allows us to construct higher orderderivatives as follows. For any finite sequence of vectors (v1, v2 . . . ) define the directional derivativeof F in direction (v1, v2, . . . ) at p inductively by ∂(v1,v2,... )F (p) = ∂v1(∂(v2,... )F )(p)
Definition 4. (Ck functions)
A function PF−→ Rn defined on an open P is called Ck if for all p ∈ P the partial derivatives of
order ≤ k of F exist and are continuous at p.A function F : X → Rn defined on a general subset X ⊂ Rm is said to be Ck if it can be extendedto a Ck function on an open set P containing X.
Perhaps a more natural definition of Ck would be to require all directional derivatives at p upto order k to be continuous at p but this is equivalent (Exercise!).
In the next section we will see a connection between C1 and differentiability. For convenienceone often restricts attention to functions in C∞, also known as smooth functions in the literature.

2.3. INTERMEDIATE AND MEAN VALUE THEOREMS 13
Many of the functions used in practice are smooth, for example linear functions are always smooth.Functions defined by polynomials or power series are smooth as well.
Differentiable functions often come up as changes of variables. To make sure one does notlose information the change of variable often has to be a bijection and its inverse should also bedifferentiable. The technical term for such nice changes of variables is diffeomorphism.
Definition 5. (Diffeomorphism)
PF−→ Q is called a Ck diffeomorphism if F is a bijection and both F and its inverse are Ck.
Apart from linear changes of coordinates perhaps polar coordinates are the best known exampleof a diffeomorphism. Pα : (0,∞) × (0, 2π) → R2 − Lα. Here Lα is the half-line in the plane thatstarts at the origin and makes angle α. Pα is given by P (re1 +θe2) = r(cos(θ+α)e1 +sin(θ+α)e2).Rotations in the plane also give diffeomorphisms. Let Rθ : R2 − 0 → R2 − 0 be the rotation ofthe plane with angle θ. Then Rβ Pα is again a diffeomorphism, in fact we have Rβ Pα = Pβ+α.A proof that Pα actually is a diffeomorphism will be given using the inverse function theorem later.
Identifying C ∼= R2 by sending x+ iy to (x, y) it follows from complex analysis that any injectiveholomorphic function f defined on region P such that with f ′(z) 6= 0 for all z ∈ P is actually adiffeomorphism from P to f(P ).
Since coordinates often depend on arbitrary choices it is a good habit to consider what happensunder a change of coordinate (diffeomorphism). Often the powerful concepts are the ones that do notdepend on the coordinates. In other words we will often try to phrase things in an diffeomorphisminvariant way. This is in the same spirit as linear algebra where one prefers linear maps to matrices,group theory (groups up to isomorphism) and general relativity (principle of covariance).
Diffeomorphisms also arise often as the flow of a solution of ordinary differential equations.
The derivative of a diffeomorphism has to be a linear isomorphism (why??). Surprisingly theconverse is true too, at least locally. This is the inverse function theorem that we will prove at theend of this chapter.
Exercises
Exercise 1. (Derivative of product)
Define R2 3 (x, y)M7−→ xy ∈ R. Show directly from the definition that for any (a, b) ∈ R2 the
function M is differentiable and its derivative satisfies M ′(a, b)(x, y) = bx+ ay.Hint: First show that the error ε in (2.3) must be k` where R2 3 h = (k, `) and recall |k`| ≤ k2 + `2.
Exercise 2. (Derivative of det)
Identify the space of all n × n matrices with Rn2
in the usual way. By writing the determinantas a sum over the symmetric group or otherwise, show that the determinant det defines a smoothfunction on Rn2
. Also compute for any n× n matrix M the directional derivative ∂M det(I).
2.3 Intermediate and mean value theorems
One of our goals is to give (relatively) simple and conceptual proofs for the correctness of allcommon constructions in multivariate calculus. Ultimately many such proofs rely on the followingtwo theorems from elementary analysis that we will take for granted:

14 CHAPTER 2. HOW TO SOLVE EQUATIONS?
Theorem 2. (Intermediate and mean value theorems)
Imagine a continuous function [a, b]f−→ R.
1. If f(a) < λ < f(b) then there exists a c ∈ [a, b] with λ = f(c).
2. If f is differentiable on (a, b) then there exists a point c ∈ (a, b) such thatf(b)− f(a) = f ′(c)(b− a).
In the remainder of this section we prove a few simple lemmas directly using the mean valuetheorem. These are all used in the next section to prove the implicit function theorem and itsfriends. We start by connecting the notions of differentiability and C1-functions:
Lemma 2. (C1 implies differentiable)
Suppose Rm ⊃ Pf−→ Rn is a C1 function at p ∈ P , then the f ′(p) exists and is determined by
f ′(p)ei = ∂f∂xi
(p), defined as in definition 3.
Proof. According to Theorem 1 it suffices to treat the case n = 1. Writing h =∑i hiei and using
the mean value theorem there is a ci ∈ (0, hi) such that hi∂f∂xi
(ci) = f(q + hiei) − f(q) for any q,
we compute f(p + h) − f(p) =∑mi=1 f(p +
∑j≤i hjej) − f(p +
∑j<i hjej) =
∑mi=1 hi
∂f∂xi
(ci) with
ci ∈ (0, hi). Therefore the error satisfies ε(h) = |f(p+h)−f(p)−∑i hi
∂f∂xi
(p)| ≤∑mi=1 |hi||
∂f∂xi
(ci)−∂f∂xi
(p)| with ci ∈ (0, hi). By continuity of the partial derivatives ε(h) = o(h).
A multivariate analogue of the mean value theorem is the following (notice the additional as-sumptions are really necessary):
Lemma 3. (Multivariate mean value theorem)
QF−→ R a differentiable map defined on an open subset Q ⊂ Rn. Suppose Q contains the line
segment between two points a, b. Then there exists a point c on this segment such that:
F (b)− F (a) = F ′(c)(b− a)
Proof. By assumption the curve γ(t) = a + t(b − a) maps [0, 1] into Q. Applying the above one-variable mean value theorem to F γ we get F (b)−F (a) = (F γ)(1)− (F γ)(0) = (F γ)′(t0) =F ′(c)(b− a) with γ(t0) = c.
A fairly typical application of this mean value theorem is the following. This lemma deals anissue that will come up in the uniqueness part of the implicit function theorem next section.
Lemma 4. If a C1 function Rn ⊃ P F−→ Rn defined on open P satisfies detF ′(p) 6= 0 then there isan open neighborhood of p in which F is injective.
Proof. Since the determinant function is continuous and detF ′(p) 6= 0 we may restrict to a ballp ∈ B ⊂ P where the linear map defined by the matrix M = (∂Fi∂xj
(ci))i,j=1...n is an isomorphism
(detM 6= 0). Suppose there are a, b ∈ B such that F (a) = F (b) then the mean value theorem saysthat for all i = 1 . . . n there must be a ci on the line segment between a, b such that F ′i (ci)(b−a) = 0.In other words M(b− a) = 0. Since detM 6= 0 we must have a = b.
In fact under the same hypotheses the map F must locally be invertible with differentiableinverse. This is the inverse function theorem, see corollary 2 in the next section.

2.4. IMPLICIT FUNCTION THEOREM 15
Exercises
Exercise 1. (Mean failure)
Why is there no version of the mean value theorem for R2 F−→ R2? Give an example of a C11
function R2 F−→ R2 and a 6= b ∈ R2 such that there is no c on the line segment between a, b withthe property that F (b)− F (a) = F ′(c)(b− a).
Exercise 2. (Constant?)
Suppose Rm ⊃ PF−→ Rn is a C1 function that satisfies F ′(p) = 0 for all p ∈ P and where P is a
non-empty open subset. Is it true that F must be constant? What if P is connected?
2.4 Implicit function theorem
The implicit function theorem tells us about the size of the set of solutions to n equations in n+ kunknowns. Basically it says that if the system is given by a differentiable function then, locally,our intuition from pretending all equations are linear is correct. In solving linear equations an easycase is the system of equations Fx = q with F ∈ L(Rm,Rn) surjective. Given some solution p, allother solutions are parametrized by kerF . More precisely F−1(q) = p+ kerF .
When F is non-linear but its derivative at a solution p is still surjective, the implicit functiontheorem says that locally the solutions are still parameterized by the kernel kerF ′(p).
Figure 2.4: The red level set can locally (in the green box) be viewed as the graph of a function.The map α sends the coordinate axes to the heavily drawn axes.
Theorem 3. (Implicit function theorem)
To describe the level set F−1(q) close to p ∈ F−1(q), for some C1 function Rk+n ⊃ P F−→ Rn 3 qwith k > 0, find any linear isomorphism Rk+n α−→ Rk × Rn sending kerF ′(p) to Rk × 0.If α exists then1:
α(F−1(q)) ∩ (α(p) +X × Y ) = α(p) + (x, f(x))|x ∈ X
for some open subsets 0 ∈ X ⊂ Rk and 0 ∈ Y ⊂ Rn and a unique C1-function Xf−→ Y .

16 CHAPTER 2. HOW TO SOLVE EQUATIONS?
Figure 2.5: The tennis ball curve example (green) F−1((2, 0)) where F (x, y, z) = (x2 + y2 +
z2, x2 + y3
3 − z2). You can see the level sets of F1 (sphere) and F2 (the big one) and also a solution
p = (1, 0, 1) (thick dot) and the horizontal line p + kerF ′(p) and the complementary space p + C(square)

2.4. IMPLICIT FUNCTION THEOREM 17
As an illustration of both the theorem and its proof with k = 1, n = 2 we consider F (x, y, z) =
(x2+y2+z2, x2+ y3
3 −z2) ∈ R2 defined on P = R3. The point p = (1, 0, 1) satisfies F (p) = q = (2, 0),
see Figure 2.5. The matrix of F ′(p) ∈ L(R3,R2) is
(2 0 22 0 −2
)and kerF ′(p) = Span(e2). For
the change of coordinates α we pick the linear map that permutes e1, e2 leaving e3 fixed. Noticethat F ′(p) is surjective (the first and last column span R2). According to theorem 3 above we
should get a C1 function Xf−→ Y between some opens X ⊂ kerF ′(p), Y ⊂ C describing the level
set near p.To foreshadow the proof let us make the implicit explicit and compute f directly. Along the
way we will run into restrictions on the domain, leading to a choice of X and Y . The idea isvery simple indeed. Just use the equations Fi = qi, i = 1 . . . n to eliminate variables that do notspan kerF ′(p) one by one. We start with the last equation F2(x, y, z) = 0 and solve for z to get
z = f3(x, y) =√x2 − y3
3 . Since we want to be close to p we chose the positive branch of the
square root, it is defined when |y| < 1. Plugging in the value for z we continue with the smaller
system G(x, y) = F1(x, y,√x2 − y3
3 ) = 2, |y| < 1. In the proof this system has already been solved
by the induction hypothesis if we can just show that the derivative G′(1, 0) is surjective. SettingJ(x, y) = (x, y, f3(x, y)) so that G = F1 J we apply the chain rule to find it is indeed surjective:
G′(1, 0) = F ′1(p)J ′(1, 0) = (2, 0, 2)
1 00 11 0
= (4, 0)
Explicitly we just solve for x (not for y!) in G(x, y) = x2 + y2 + x2 − y3
3 = 2 giving x = g(y) =√1− y2
6 (3− y), again we chose the positive square root to get close to p and |y| < 1 is still sufficient.
So finally the function f we seek is
f(y) = (g(y), f3(g(y), y)) = (
√1− y2
6(3− y),
√1− y2
6(3− y)− y3
3)
From the formula it is clear that whenever defined the function is C1. For the domain X of f wemay take X = y ∈ R : |y| < 1 and as the range Y = (x, z) ∈ R2|max(|x|, |z|) < 1.
Now that we have seen all the main features we proceed with a proof. Everything we did so farcomes together in this proof so enjoy the ride.
Proof. We only have to prove the theorem in the special case where α is the identity. The generalcase follows by applying this special case to F = F α−1. From now on we will assume thatRk × 0 = kerF ′(p).
The first step is to invoke lemma 4 to show that the function
P 3 (u, v)S7−→ (u, F (u, v)) ∈ Rk+n
is injective on a smaller domain p + X1 × Y1, for some open 0 ∈ X1 ⊂ Rk and 0 ∈ Y1 ⊂ Rn.This is allowed because by the chain rule S′(p) is a linear isomorphism from Rk+n to itself (the
1For any set S we use the abbreviation p + S = p + s|s ∈ S

18 CHAPTER 2. HOW TO SOLVE EQUATIONS?
matrix with respect to the standard bases is triangular). In what follows we will always restrict Fto p+ (X1 × Y1) ⊂ P so that S is injective.
To prove the existence of X,Y, f we proceed by induction on n.The base case n = 1 will be settled using the intermediate value theorem as follows. Since
kerF ′(p) is k-dimensional we must have F ′(p)ek+1 6= 0, say it is positive. By continuity of F ′ andthe mean value theorem there must be a β > 0 such that F (p + ek+1) > q > F (p − ek+1) and bycontinuity even F (p + (x, β)) > q > F (p + (x,−β)) for all x ∈ X = x ∈ Rk : |x| < β (possiblyafter shrinking β). The intermediate value theorem applied to t 7→ F (p + (x, t)) gives for eachx ∈ X a value y ∈ Rn such that F (p+ (x, y)) = q. This y must be unique since if we had anothersuch y then S(x, y) = S(x, y) contradicting injectivity of S. We may thus call y = f(x) defining
the function Xf−→ Y we were looking for with Y = Y1.
Next we prove that the Xf−→ Y found above is C1 in any u ∈ X. This follows from
∂wf(u) = −∂(w,0)F
′(p+ (u, f(u)))
∂ek+1F ′(p+ (u, f(u)))
for any w ∈ Rk (2.4)
To prove this formula we pick t > 0 and apply the multivariate mean value theorem (lemma 3) toF on the line L connecting a = p+ (u, f(u)) to b = p+ (u+ tw, f(u+ tw)) inside p+X × Y . SinceF (b) = F (a) = q we find p+ (x, y) ∈ L such that 0 = F ′(p+ (x, y))(b− a) = tF ′(p+ (x, y))(w, 0) +
(f(u+ tw)− f(u))F ′(p+ (x, y))ek+1. In other words f(u+tw)−f(u)t = −F
′(p+(x,y))(w,0)F ′(p+(x,y))ek+1
. Taking the
limit t→ 0 proves formula (2.4).For the induction step assume the theorem holds whenever the number of equations is less
than some n > 1. To prove the theorem for the case F =∑ni=1 Fiei with kerF ′(p) = Rk × 0 we
argue in two steps. (1) Use the n-th equation to express one of the variables in terms of the others,(2) plug this expression into the remaining n− 1 equations and apply the induction hypothesis.
(1) We can apply the induction hypothesis to the equation Fn(p) = en(q) = qn. There must
be a linear isomorphism Rk+n γ−→ Rk+n−1 × R with γ kerF ′n(p) = Rk+n−1 × 0 because otherwisedim kerF ′(p) > k, we choose it to fix kerF ′(p). By induction we obtain a C1-function Rk+n−1 ⊃A
h−→ B ⊂ R such that γF−1n (qn) ∩ (γ(p) + A × B) = γ(p) + (a, h(a))|a ∈ A. Notice that
Fn(p + γ−1(x, h(x))) = qn so differentiating in a = 0 gives ∂γ−1eih(0) = −∂γ−1ei
Fn(p)
∂γ−1ek+nFn(p) = 0 when
i = 1 . . . k.(2) Now we plug in h. Setting Rk+n−1 3 u J7−→ p + γ−1(u, h(u)) ∈ Rk+n we define Rk+n−1 ⊃
QG−→ Rn−1 by G(z) =
∑n−1i=1 (FiJ)(z)ei. Here 0 ∈ Q is an open set that J should send to P . For all
i = 1 . . . k we have γ−1ei ∈ kerG′(0) because J ′(0)γ−1ei = γ−1ei + ∂γ−1eifn(0) = γ−1ei. ThereforekerG′(0) is mapped onto Rk×0 by γ. We may thus apply the induction hypothesis toG to obtain a
C1 function Rk ⊃ X2g−→ Y2 ⊂ Rn−1 such that γG−1(q1, . . . , qn−1)∩(X2×Y2) = (x, g(x))|x ∈ X2.
Setting f(x) = γ−1(g(x), h(x, g(x))) and 0 ∈ X ⊂ X2 and Y ⊂ Y1 such that A ⊃ X × Y2 finishesthe proof. This is because f is C1 by the chain rule and f is well defined on X and unique becauseof S. Moreover z ∈ F−1(q) ∩ p + (X × Y ) implies Fn(z) = qn so z = p + γ−1(a, h(a)) and soG(a) = (q1, . . . , qn−1). This means a = γ−1(x, g(x)) so z = p+ (x, f(x)) for some x ∈ X. Here weused the fact that γ fixes the first k coordinates.
Often the following more coordinate dependent version of the theorem is used:
Corollary 1. (Explicit implicit function theorem)
Imagine a C1 function Rk × Rn ⊃ PF−→ Rn with F (a, b) = q for some q ∈ Rn and n, k > 0. If

2.4. IMPLICIT FUNCTION THEOREM 19
Figure 2.6: The level set F = c locally (in the green area) looks like the graph of a function f ofx ∈ Rk.
detF (a, ·)′(b) 6= 0 then there are open sets a ∈ U ⊂ Rk, b ∈ V ⊂ Rn and a unique C1 function
Uf−→ V such that
F−1(q) ∩ (U × V ) = (u, f(u))|u ∈ U
Proof. Set Rk × Rn 3 (x, y)α−→ (x, (F ′(a, ·)(b))−1y) ∈ Rk × Rn then α is a linear isomorphism
and must send kerF ′(p) to the first k coordinates, where p = (a, b). By theorem 3 we thus haveF−1(q) ∩ (p + (X ∩ α−1Y )) = (a + x, b + α−1g(x))|x ∈ X for some neighborhoods of zero Xand Y . Here we used that α fixes the first k coordinates. A translation by p finishes the proof withf(u) = b+ α−1g(u− a) and U = a+X, V = b+ Y .
An important corollary is the inverse function theorem. To solve G(x) = y for x we apply theimplicit function theorem to the function F (y, x) = G(x) − y describing the graph of G, now as agraph of a function of y.
Corollary 2. (Inverse function theorem)
If Rn ⊃ P G−→ Rn is C1 and G(u) = v and detG′(u) 6= 0 then there are open sets u ∈ U, v ∈ V and
a C1 inverse Vf−→ U , so G f = idV and f G = idU .
Proof. Apply the (explicit) implicit function theorem to P × Rn 3 (y, x)F7−→ G(x) − y ∈ Rn. The
conditions for applying the theorem are satisfied since we have F (v, u) = 0 and F (v, ·)′(u) = G′(u)
has non-zero determinant. Therefore there is a C1-function Vf−→ Rn such that F (y, f(y)) = 0 or
G(f(y)) = y for all y in some open set V 3 v. By lemma 4 we know G is injective and U = G−1(V )is open and contains u. So G restricts to a bijection from U to V . It follows that f is a bijectionfrom V to U .
The inverse function theorem makes it easy to prove that maps such as polar coordinates Pαare diffeomorphisms. One just has to check that the derivative of your C1 bijection never has

20 CHAPTER 2. HOW TO SOLVE EQUATIONS?
determinant equal to 0.
Another way to look at the implicit function theorem is to say the solution set F−1(p) is madeup from open pieces of Rk. Of course the open pieces of have to fit together in a coherent way: anytwo descriptions of the same neighborhood should be related by a diffeomorphism. In chapter 5we will formalize this into the notion of an atlas of a manifold. For now the conclusion is that anylocal construction on Rk that is invariant under diffeomorphisms can be lifted to the level sets.
For solving equations in practice the methods used in the above proofs may not be very effective.Our goal was mostly to find conditions that guarantee existence of the solutions. If necessary wecan then attempt to find them explicitly using more specialized techniques. Often however one isonly interested in some qualitative property of the solution, not the solution itself so we sometimesget away without any explicit calculations.
In case one does need more explicit solutions, Newton’s method may help. Let us look at solving
y = G(x) for some Rn G−→ Rn, compare the inverse function theorem. We try to approximate thesolution x by a sequence xn defined by xn+1 = xn + G′(xn)−1(y − G(xn)) for some initial guessx0. This is motivated by assuming y = G(x) = G(xn + x − xn) ≈ G(xn) + G′(xn)(x − xn) sox ≈ xn + G′(xn)−1(y − G(xn)). If G is C2 and the guess x0 is sufficiently near x one can showthat this procedure actually converges2 to the solution. Using the Banach contraction principle thisnumerical procedure can be elevated to a proof too. This type of argument is in some sense morepowerful than the one we gave here, it works in infinite dimensions just as well and will prove theexistence of solutions to ordinary differential equations.
Exercises
Exercise 1. (Crazy system?)Consider the following system of equations.
sin(a+ b) + c+ d+ e+ f + (1 + b)g = 5
ac+ cos(b)d+ e+ f + g = 4
a+ b(c+ d) + e+ exp(a)(f + g) = 3
b+ bc+ ad+ ae+ f + g = 2
ab+ ac+ ad+ be+ bf + exp(sin ab)g = 1
a. Give R7 F−→ R5 and c ∈ R5 such that the solution set to the system is of the form F−1(c)and explain why your F is a C1-function.
b. Verify that (0, 0, 1, 1, 1, 1, 1) ∈ F−1(c).
c. Give a condition under which we can write the solution set F−1(c) close to the solution(0, 0, 1, 1, 1, 1, 1) as the graph of a C1 function.
d. Check that the condition you found in part c. is actually satisfied.
2Even for simple G it is often hard to predict which initial guess x0 will converge, fractals like the Mandelbrotset first appeared in this context.

2.4. IMPLICIT FUNCTION THEOREM 21
Exercise 2. (Inverse implies implicit)In this exercise we derive a version of the implicit function theorem from the inverse function
theorem where R2 F−→ R is a C1 function with F (p) = q and kerF ′(p) = R× 0.
a. Define R2 3 (x, y)S7−→ (x, F (x, y)) ∈ R2. Prove that detS′(p) 6= 0.
b. Prove that there is a C1 inverse function A1 × A2S−1
−−→ B for some open sets p1 ∈ A1, q ∈A2, B 3 p. Here p = (p1, p2).
c. Define A1f−→ R by S−1(x, q) = (x, f(x)). Why is f well-defined and C1?
d. Prove that F−1(q) ∩B = (x, f(x))|x ∈ A1.
e. Prove that there are open sets p ∈ U, V 3 0 such that there is a C1 diffeomorphism fromU ∩ F−1(q) to V ∩ (R× 0).
Exercise 3. (Line bundle)
Identifying C ∼= R2 and C2 ∼= R4 we consider the function (z, w) ∈ C2|w 6= 0 3 (z, w)F7−→ z
w ∈ C.Determine kerF ′(p) for p = (i, i) and describe F−1(1), both as subsets of R4.

22 CHAPTER 2. HOW TO SOLVE EQUATIONS?

Chapter 3
Is there a fundamental theorem ofcalculus in higher dimensions?
The fundamental theorem of calculus states that the integral of the derivative is the functionevaluated at the boundary and that every function has a primitive, an indefinite integral.
Before setting out to generalize the fundamental theorem of calculus to arbitrary dimensions letus have a brief look at vector calculus.
Recall the theorems of Gauss and Stokes and line integrals. None of these concepts is madeprecise in the present section, they are just meant to guide us into the right direction.
A vector field F is a differentiable Rm ⊃ PF−→ Rm where P is open. When m = 3 recall
div, curl, grad were defined by
div(F ) =∑i
(F ′)ii curl(F ) = ((F ′)23−(F ′)3
2, (F′)3
1−(F ′)13, (F
′)12−(F ′)2
1) grad(f) = (f ′e1, f′e2, f
′e3)
Notice we take (F ′)ij to mean the coefficients of the derivative with respect to the standard bases.
As written div, grad, curl depend very much on the choice of basis in R3.Gauss: For a vector field F defined on a three-dimensional domain D bounded by S we have∫
D
div(F )dV =
∫SF ·NdS
Stokes: For a vector field F defined on a surface S bounded by a curve C we have∫S
curl(F ) ·NdS =
∫CF · dr
For a function f defined on a curve C with end-points a, b we have:∫C
grad(f) · dr = f(b)− f(a)
Without going into too many detail, we notice that the left hand side is integration over ak-dimensional object D involving some kind of derivative. The right hand side relates this to anintegral over the boundary of D of the original function.
23

24CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Also the type of object integrated varies. The volume integral counts how many points fit in acube. The surface integral counts how many arrows of our vector field pierce through the surface.The line integral counts how many surfaces perpendicular to the vector field get pierced by thecurve.
Finally we note that finding a primitive/antiderivative in this context comes down to findingpotentials. Not every vector field is the gradient of a function. However on a simply connecteddomain vector fields F satisfying curlF = 0 are shown to be F = grad(f) for some function f .Likewise a vector field F is of the form F = curlG for some other vector field G, provided divF = 0.Hopefully at the end of this chapter we will have more insight into why this must be the case.
3.1 Elementary Riemann integration
Since we only plan to work with functions that are differentiable in this course we choose to setup a very naive version of integration. While limited this framework is complete and shows manyarguments in their simplest form. Readers familiar with more advanced integration theories arewelcome to substitute their preferred notion of integral.
Definition 6. (Riemann integral, light)
For a continuous function Rf−→ R on a rectangular box R =
∏ki=1[ai, bi] we define∫
R
f = limn→∞
IR,n(f) where IR,n = 2−nk∑
p∈R∩(2−nZ)k
f(p)
As an elementary example take f(x) = x and R = [0, 1] then we get IR,n(f) = 2−2n∑2n
j=0 j =
2−2n2n(2n + 1)/2 = 12 + 2−n−1 so as expected
∫[0,1]
x = 12 . It is customary to write ’dx’ after
the integrand. We will not do this because later in the chapter we will use ’dx’ in the sense ofdifferential forms or covector fields.
Some elementary properties are given in the next lemma.
Lemma 5. (Properties of∫
)
1. The limit defining∫Rf exists for any continuous f .
2.∫Rf ∈ vol(R)[minR f,maxR f ]
3. ∀R :∫Rf =
∫Rg ⇒ f = g
Proof. Since any continous function on the compact set R is uniformly continuous we see the limitexists. To show this it suffices to check that |IR,n(f)− IR,m(f)| becomes small for sufficiently largen < m so that it is a Cauchy sequence. Given ε there is an N such that for all |q| < 2−N and all pwe have |f(p)− f(p+ q)| < ε, n,m ≥ N :
|IR,n(f)− IR,m(f)| ≤∑
p∈R∩(2−mZ)k
2−mk|f(p)− f(p)| < 2mk2−mkε
here p is p with all coordinates rounded to the closest multiple of 2−n.

3.1. ELEMENTARY RIEMANN INTEGRATION 25
For part 2 we note that any continuous function attains its max and min on the compact set R.For any n we have IR,n ≤ maxR f and similar for min. Part 3 follows from part 2 and continuity off : just take a sequence of smaller and smaller rectangles centered at point p. Then f(p) = g(p).
The Fubini theorem about computing an integral by first integrating out a couple of variablesis a simple matter in this framework.
Lemma 6. (Fubini) ∫R×S
f =
∫R
F where F (p) =
∫S
f(p, ·)
Proof. F (p) = limm→∞ IS,mf(p, ·)
IR,n(F ) =∑
p∈R∩(2−nZ)k
2−nk limm→∞
IS,mf(p, ·) = limm→∞
∑p∈R∩(2−nZ)k
2−nkIS,mf(p, ·) =
limm→∞
∑(p,q)∈R×S∩(2−nZ)k×(2−mZ)`
2−nk−m`f(p, q) = limm→∞
am,n
Notice that an,n = IR×S(f) so finally∫RF = limn,m→∞ am,n = limn→∞ an,n =
∫R×S f
Lemma 7. (Fundamental theorem of calculus)Suppose f is C1 on [a, b]. Then ∫
[a,b]
f ′ = f(b)− f(a)
The function F (x) =∫
[a,a+x]f then is differentiable and F ′(x) = f(x).
Proof.
f(b)− f(a) =∑
p∈[a,b)∩2−nZ
f(p+ 2−n)− f(p) =∑
p∈[a,b)∩2−nZ
2−nf ′(p) + ε(f, p, 2−n) =
∫[a,b]
f ′
The last equality is valid because for all p we have limn→∞ 2nε(f, p, 2−n) = 0. Taking p∗ to be thepoint where ε(f, p, 2−n) is maximal we have |
∑p∈[a,b)∩2−nZ ε(f, p, 2
−n)| ≤ 2nε(f, p∗, 2−n) convergingto 0.
For the second equality consider
F (x+ h)− F (x) =
∫[x,x+h]
f ∈ h[ mint∈[0,h]
f(x+ t), maxt∈[0,h]
f(x+ t)]
Continuity of f means that limh→0 mint∈[0,h] f(x + t) = f(x) and the same for the maximum.Dividing by h and taking the limit on both sides finishes the proof.
Fubini’s theorem allows us to give a soft proof of the fact that mixed partial derivatives commute.This result will be very important later in discussing the exterior derivative. Set ∂if(p) = f ′(p)ei.
Lemma 8. (Mixed partial derivatives commute)For any C2 function f we have ∂i∂jf = ∂j∂if .

26CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Proof. It suffices to prove the case of a function f defined on an open subset of R2. This is because∂i∂jf(p) = ∂1∂2f(0, 0) with fp(x, y) = f(p+ xei + yej). We will show that I =
∫[a,b]×[c,d]
∂1∂2f =∫[a,b]×[c,d]
∂2∂1f = J . By continuity it then follows that ∂2∂1f = ∂1∂2f .
Using Fubini, I =∫
[a,b]F where F (p) =
∫[c,d]
g′ and g(q) = ∂1f(p, q). By the fundamental
theorem of calculus I =∫
[a,b]g(d)−g(c) =
∫[a,b]
∂1f(p, d)−∂1f(p, c) =∫
[a,b]h′ with h(p) = f(p, d)−
f(p, c). So we conclude that I = h(b) − h(a) = f(b, d) − f(b, c) − f(a, d) + f(a, c). Splitting theintegral in the other order and doing the same steps shows that J gives the same answer.
Yet another application of Fubini is to prove that one can differentiate under the integral sign:
Lemma 9. (Differentiation under the integral sign)For any C1 function f defined on rectangle [a, b]×R we have ∂1
∫Rf =
∫R∂1f .
Proof. By part 3 of the properties of integration lemma, it suffices to prove that for all [c, d]we have
∫[c,d]
∂1
∫Rf =
∫[c,d]
∫R∂1f . Using the fundamental theorem of calculus the left hand
side is equal to (∫Rf)(d) − (
∫Rf)(c) =
∫Rf(d, ·)− f(c, ·). Fubini says the right hand side is∫
R
∫[a,b]
∂1f =∫Rf(d, ·)− f(c, ·) finishing the proof.
Exercises
Exercise 1.Prove the change of variables theorem for a C1 function [a, b]
ϕ−→ R with ϕ(a) < ϕ(b) by applying
the fundamental theorem of calculus. So given a continuous function [ϕ(a), ϕ(b)]f−→ R and ∀x ∈
[a, b] : ϕ′(x) ≥ 0 show that: ∫[a,b]
(f ϕ)ϕ′ =
∫[ϕ(a),ϕ(b)]
f
Exercise 2.Confirm that the usual Riemann integral coincides with our notion of integral for continuous func-tions on a product of closed intervals. Notice that since Fubini holds in either theory it suffices toconsider the one-dimensional case.
3.2 k-vectors and k-covectors
In this section we describe generalizations of vectors and covectors that we will be integrating with.They are designed to capture the properties seen in the vector calculus of R3 and carry them overto Rn or really any finite dimensional vector space V .
The foundation for our theory is the intersection map I:
L(Rk, V )× L(V,Rk) 3 (B,C)I7−→ det(C B) ∈ R (3.1)
The number I(B,C) can be interpreted as the oriented intersection of the level sets of C with thebox B([0, 1]k). The following lemma makes this more precise.
Lemma 10. (Determinant counts oriented intersections)For all B ∈ L(Rk, V ) and C ∈ L(V,Rk) we have
I(B,C) = det(C B) = ± limn→∞
n−k#w ∈ (1
nZ)k : C−1(w) ∩B[0, 1]k 6= ∅

3.2. K-VECTORS AND K-COVECTORS 27
Figure 3.1: Intersections in V = R3 in various codimension. The box B([0, 1]k) is shown in purple,a few of the level sets of C are in yellow.

28CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
where # means the cardinality of the set.
Proof. If C B is not an isomorphism then the left hand side of the equation is 0 and so is the righthand side.
First the case k = 1. Suppose I(B,C) = C(B(e1)) = x ∈ R. The condition z ∈ C−1(w) ∩B[0, 1]|w ∈ 1
nZ means z = tB(e1) and C(z) = mn for some t ∈ [0, 1], m ∈ Z. In other words
C(tB(e1)) = tx = mn and |m| = 0, 1, . . . , bnxc. It follows that up to a sign, the right hand side is
equal to limn→∞ n−1(bnxc+ 1) = xFor the general case we make use of lemma 1. Replacing C by Rcij C does not change the
determinant and does not change the intersection count either. The same goes for replacing Bby B Rcij . By Gaussian elmination we may thus assume that C B is diagonal, so Ci(Bj) = 0
unless i = j. In that case we have detC B =∏Ci(Bi). Using the k = 1 case above we see this
corresponds to the right hand side as well.
The sign of the determinant compares the orientations of the boxes B([0, 1]k) and C−1([0, 1]k)∩imB, the sign is + if the orientations agree and minus otherwise. Of course this is no more than avisually appealing tautology. At the end of the day Gaussian elimination lemma 1 is what counts.Geometrically it just means that the determinant is supposed to be invariant under shears.
In order to count several intersections at the same time it makes sense to extend I to formallinear combinations1 of B’s and C’s. In other words, for any set S we may consider the vector spaceSpan(S) to be spanned by all finite linear combinations of elements of S.
For example we might want to measure how a given C intersects two distinct boxes B and B byadding the intersection numbers (with sign). Likewise we can ask how much in total the level setsof C and C intersect a given box. Furthermore, thinking of intersection with a box that is twice aslarge, it makes sense to introduce scalar multiplication as well. Finally multiplication by −1 shouldreverse the orientation and change the sign of the intersection. All this motivates the definition
Definition 7. (Intersection map)
Define the map Span L(Rk, V )× Span L(V,Rk)I−→ R by
I(B + aB, C) = I(B,C) + aI(B, C) I(B,C + aC) = I(B,C) + aI(B, C)
What really matters is not the B and C’s themselves but rather the effect of I on them. Sowe say that two combinations of B’s are equivalent if they always give the same value of I whenpaired with a C. Likewise two combinations of C’s are equivalent if they give the same answerwhen evaluated on all B’s. This brings us to the definition of k-vectors and k-covectors as a naturalconsequence of studying2 the intersection map I. 3
Definition 8. (k-(co)vectors)
1. The space of k-vectors ΛkV is the vector space of finite formal linear combinations of elementsof L(Rk, V ), modulo the equivalence relation X ∼ X if for all C ∈ L(V,Rk) we have I(X,C) =I(X, C).
1 Formal means we do NOT use the pointwise addition of L(Rk, V )2Applying the above procedure to a map different from I produces other potentially interesting vector spaces
such as tensor powers (use ev(B,C) =∏
i Ci(Bi)) and symmetric powers (use the permanent) etc.3In what follows we are taking the quotient of the vector space SpanL(Rk, V ) by the subspace spanned by all the
differences of equivalent elements.

3.2. K-VECTORS AND K-COVECTORS 29
2. The space of k-covectors ΛkV ∗ is the vector space of finite formal linear combinations ofelements of L(V,Rk), modulo the equivalence relation Y ∼ Y if for all B ∈ L(Rk, V ) we haveI(B, Y ) = I(B, Y ).
The key feature of this definition is that although we work with equivalence classes, intuitivelywe may always think in terms of a specific B being intersected with a specific C. This way thegeometry is never lost. Working with equivalence classes is common in integration, for examplethe space of L2(X) functions on X is not really a space of functions. Rather two functions thatdiffer only on a set of measure zero (are equal almost everywhere) are in the same equivalence class.More technically speaking the definition is made to force I to be a non-degenerate pairing betweenΛkV and ΛkV ∗. What is not yet clear is why these spaces are finite dimensional. At the end of thesection we will see that dim ΛkV =
(nk
).
The k-vectors are meant to generalize usual vectors in V in the sense that 1-vectors correspondto usual vectors, elements of V . Or rather
Lemma 11. There is a natural isomorphism Λ1Vϕ−→ V given by ϕ([
∑i aiBi]) =
∑i aiBi(1).
Likewise there is an isomorphism V ∗ → Λ1V ∗ sending the covector C ∈ V ∗ to its equivalence class[C] ∈ Λ1V ∗.
Proof. The linear map ϕ is well-defined because if [∑i aiBi] and [
∑i a′iB′i], then for all C ∈ V ∗ we
must have
Cϕ(∑i
a′iB′i) =
∑i
a′iCB′i(1) = I(
∑i
a′iB′i, C) = I(
∑i
aiBi, C) =∑i
aiCBi(1) = Cϕ(∑i
aiBi)
Since this holds for arbitary C we must have ϕ(∑i a′iB′i) = ϕ(
∑i aiBi). Surjectivity of ϕ follows
from ϕ([1 7→ v]) = v for any v ∈ V and finally if Z = [∑i aiBi] ∈ kerϕ and C ∈ V ∗ then
I(Z,C) =∑i ai(C Bi)(1) = C(
∑i aiBi(1)) = Cϕ(Z) = 0. The case of covectors is left as an
exercise.
Often 1-vectors and 1-covectors will be identified with the usual vectors and covectors using theabove isomorphisms.
For k = 0 we get Λ0V = Λ0V ∗ = R. Suppose C ∈ L(V,R0) and B ∈ L(R0, V ). Then C is the 0-function and B the 0 vector but nevertheless we have the convention that I(B,C) = det(C B) = 1since the determinant is an empty product. That means that we allow for example 2[C] and do notidentify it with [C].
For k = 2 we already obtain something new. For example in Λ2R3 we have [B] + [B] = [B],where Be1 = e1, Be2 = e1 + e3, Be1 = e1 − e2, Be2 = e2 and Be1 = e1, Be2 = e2 + e3. To showequality we use brute force and write down matrices for B, B, B and a general C ∈ L(R3,R2) and

30CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
compute:
det
(a b cd e f
) 1 10 00 1
= det
(a a+ cd d+ f
)= a(d+ f)− (a+ c)d (3.2)
det
(a b cd e f
) 1 0−1 10 0
= det
(a− b bd− e e
)= (a− b)e− b(d− e) (3.3)
det
(a b cd e f
) 1 00 10 1
= det
(a b+ cd e+ f
)= a(e+ f)− (b+ c)d (3.4)
We see that as expected det(C B) + det(C B) = det(C B) i.e. the first two lines add to makethe third for any C represented by the 2× 3 matrix. Therefore [B] + [B] = [B]. Of course there arebetter and more geometric ways to do this as we will see below.
Since the definition is really confusing to work with directly we will show how any basis of Vgives rise to bases for the spaces of k-(co)vectors, see lemma 12. To construct the basis we first givea recipe for building k-vectors from usual ones.
Definition 9. (Wedge)
For B1, . . . , Bk ∈ L(R, V ) define∧ki=1Bi = B1 ∧ B2 ∧ · · · ∧ Bk = [B] ∈ ΛkV with B(v1, . . . vk) =∑
iBivi. Similarly for C1, . . . , Ck ∈ L(V,R) define∧ki=1 C
i = C1 ∧ · · · ∧ Ck = [(C1, . . . , Ck)] ∈ΛkV ∗.
Any element of L(Rk, V ) and L(V,Rk) can be written as a wedge product.The key thing to notice here is that taking the intersection maps of wedge products is easy:
I(∧j
Bj ,∧i
Ci) = det(Ci Bj)i,j=1...k (3.5)
Viewed as a matrix whose columns are determined by the vectors bj = Bj(1) we get a functionD(b1, . . . bk) = det(Ci(bj))i,j=1...k. The two main properties of the determinant4 are that it ismultilinear and alternating in the following sense (for all i 6= j):
D(b1, . . . , bj−1, bj + ab′j , bj−1, . . . bk) = D(b1, . . . , bj , . . . bk) + aD(b1, . . . , b′j , . . . , bk) (3.6)
D(b1, . . . , bi, . . . , bj , . . . bk) = −D(b1, . . . , bj . . . , bi, . . . , bk) (3.7)
For our wedges this means that we get the following relations in ΛkV :
B1 ∧ · · · ∧ (Bj + aB′j) ∧ · · · ∧Bn = (B1 ∧ · · · ∧Bj ∧ · · · ∧Bn) + a(B1 ∧ · · · ∧B′j ∧ · · · ∧Bk) (3.8)
B1 ∧ · · · ∧Bi ∧ · · · ∧Bj ∧ . . . Bk = −B1 ∧ · · · ∧Bj · · · ∧Bi ∧ · · · ∧Bk (3.9)
This is proven by pairing with an arbitrary element C =∧Ci and unwinding the definitions. Notice
that the addition on the left hand side can be taken either as vectors because of the isomorphismϕ between V and Λ1V .
4this is a direct consequence of Gaussian elimination, lemma 1.

3.2. K-VECTORS AND K-COVECTORS 31
Precisely the same formulas hold in ΛkV ∗ where instead of the Bi we now have Ci ∈ L(V,R).This is because the determinant is not just multilinear and alternating in the columns but also inthe rows of a matrix.
The example above can now be streamlined considerably. Notice [B] = e1 ∧ (e1 + e3) while[B] = (e1− e2)∧ e2. From the above rules it follows that [B] + [B] = e1∧ (e1 + e3) + (e1− e2)∧ e2 =e1 ∧ e3 + e1 ∧ e2 = e1 ∧ (e2 + e3) = [B].
The wedge products also provide a convenient basis for our spaces of k-(co)vectors. Given abasis b1, . . . bn with dual basis bi of V we can build bases for the spaces of k-(co)vectors as follows.Define bI =
∧i∈I bI and bI =
∧i∈I b
i. Here the wedge product is taken in increasing order. Forexample b1,5,2 = b1 ∧ b2 ∧ b5.
Lemma 12. (Basis of k-(co)vectors)bI |I ⊂ 1, . . . n, |I| = k and bI |I ⊂ 1, . . . n, |I| = k are a basis and dual basis for the
spaces ΛkV and ΛkV ∗. In particular dim ΛkV =(nk
)= dim ΛkV ∗ and (ΛkV )∗ ∼= ΛkV ∗ via the
non-degenerate pairing I.
Proof. Since ΛkV is spanned by elements∧ki=1Bi ∈ L(Rk, V ) it suffices to write those in terms of
the bI . Expressing Bi ∈ L(R, V ) ∼= V in terms of the basis and reordering the factors in the wedgeproduct using (3.8) is enough. The same works to show that bI span the space of k-covectors.
Linear independence follows from the formula I(bI , bJ) =
1 if I = J
0 if I 6= Jthat is a consequence of
the determinant interpretation above.
In practice one often has to change coordinates or map to other vector spaces. To transferk-covectors from vector space W to vector space V we use the pull-back. Recall that given a linearmap H from V to W we have a transpose/dual map H∗ from W ∗ to V ∗ by pre-composing with H.
Definition 10. (Pull-back)For any H ∈ L(V,W ) we define
ΛkW ∗ 3 [∑i
aiCi]
H∗7−−→ [∑i
ai(Ci H)] ∈ ΛkV ∗
This is well defined because if [∑i aiC
i] = [∑i aiC
i] then for any B we have
I(B,H∗∑i
aiCi) =
∑i
aiI(H B, Ci) =∑i
aiI(H B,Ci) = I(B,H∗∑i
aiCi)
Since this holds for all B we have H∗[∑i aiC
i] = H∗[∑i aiC
i] as required.
A similar definition allows us to transport k-vectors but the direction is opposite (Exercise).
The pull-back factors nicely through compositions and wedge products as H∗∧Ci =
∧H∗Ci
and H∗G∗ = (G H)∗.
A simple example of pull-back is the following. Define H ∈ L(R2,R2) by He1 = ae1 + ce2 andHe2 = be1 + de2. Then e1 ∧ e2 ∈ Λ2R2∗ can be pulled back along H and this gives H∗(e1 ∧ e2) =[(e1 H, e2 H)] = (ae1 + be2) ∧ (ce1 + de2) = (ad − bc)(e1 ∧ e2). It is not a coincidence that thedeterminant of the matrix of H pops up here.

32CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Exercises
Exercise 1 (Connection with multilinear alternating functions)In the the literature one usually describes k-covectors using alternating multilinear maps. A functionA : V k → R is alternating if A(v1, . . . vk) = 0 whenever vi = vj for some i, j and multilinear means
linear in each component. Let Altk(V ) be the space of all alternating multilinear maps on V . Inthis exercise we prove that Altk(V ) ∼= ΛkV ∗.
a. For any C ∈ L(V,Rk) show that the function AC defined by AC(v1 . . . vk) = I(∧i vi, C) is in
AltkV .
b. Prove that AltkV is a vector space with respect to point-wise linear combinations. Show thatthe previous part gives a linear map ΛkV ∗ → Altk(V ).
c. Show that the above map is an isomorphism.
Exercise 2 (Exploring 2-vectors)What are 2-vectors in R? In R2? and in R3 and R4?
Exercise 3Wedge product. There is a bilinear map Λk(Rn)∗ × Λ`(Rn)∗
∧−→ Λk+`(Rn)∗ called the wedge prod-uct. It is defined by F ∧G = [(F,G)] for any F,G ∈ L(Rn,Rk), L(Rn,R`) and extended bilinearly.Why is it well-defined?
Exercise 4One may push-forward a k-vector field on W to a k-vector field on V using formulas similar tothose of the pull-back. Can you make this precise?
Exercise 5Show that for B ∈ L(Rk, V ) and C ∈ L(V,Rk) we have
I(B,C)−1 = ± limn→∞
n−k∑
w∈( 1nZ)k
#(C−1([0, 1]k) ∩B(w))
You may assume that C B is an isomorphism.
Exercise 6Give an explicit isomorphism between the space of 1-covectors Λ1V ∗ and V ∗.
Exercise 7When V = R3 are there any 2-covectors Y ∈ Λ2V ∗ such that Y 6= [C] for any C ∈ L(V,R2)? Whatabout the case V = R4?Hint: Use lemma 12
Exercise 8Given H ∈ L(V,W ) and G ∈ L(U, V ) prove that for any Y ∈ ΛkW ∗ we have (G∗ H∗)Y =(H G)∗Y .

3.3. (CO)-VECTOR FIELDS AND INTEGRATION 33
Figure 3.2: Some random vector fields on a square given by quadratic functions.
Exercise 9In this exercise we identify vectors in R2 with 1-vectors in Λ1R2. Explain why for any a, b ∈ R2 wehave a λ ∈ R such that a ∧ b = λe1 ∧ e2. We say that λ
2 is the oriented area of the triangle withvertices 0, a, b. Prove that for a, b, c ∈ R2 we have 1
2 (b − a) ∧ (c − a) = 12a ∧ b + 1
2b ∧ c + 12c ∧ a.
What is the relationship between areas of triangles that is implied?
3.3 (co)-vector fields and integration
Now that we created k-(co)vectors we would like them to vary as you move around an open setP ⊂ Rn. Perhaps the most familiar instance of this idea is that of a vector field. A vector field
is just a function PX−→ Rn that we visualize by drawing an arrow X(p) at point p ∈ P . In our
terminology vectors coincide with 1-vectors and so we can define k-vector fields and even k-covectorfields in the same way.
Definition 11. ((co-)vector fields in Rn)Let P ⊂ Rn be an open set. A Cm, k-vector field is a Cm function X : P → ΛkRn. A Cm,k-covector field5 is a Cm function ω : P → ΛkRn∗. The set of all C2 k-covector fields is calledΩk(P ). Our convention is that Ω0(P ) is the set of C1-functions on P 6.
We are using here the fact that the derivative can be defined for functions P → V for anyvector space V . All the formulas and definitions generalize to this case (Exercise!). Alternativelyone makes an explicit isomorphism between V and RN by choosing a basis and checks that nothingreally depended on the choices made.
The simplest examples of k-covector fields are the constant k-covector fields. For any Y ∈ ΛkRn∗we get a k-covector field also called Y ∈ Ωk(P ) defined by Y (p) = Y for all p ∈ P . For examplee1 ∧ e2 is a 2-covector in R2 and can also be interpreted as the constant 2-covector field on someP ⊂ R2. Constant functions and constant vector fields are used similarly.
Operations on k-covectors are extended pointwise to k-covector fields. For example for α, ω ∈Ωk(P ) we define (α+ ω) ∈ Ωk(P ) by (α+ ω)(p) = α(p) + ω(p) and (
∧i∈I η
i)(p) =∧si=1(ηi(p)) for
η1 . . . ηs ∈ Ω1(P ). For any f ∈ Ω0(P ) we define fω ∈ Ωk(P ) by (fω)(p) = f(p)ω(p).Actually the constant k-covector fields together with pointwise multiplication by functions al-
ready is enough to describe all fields.
5These are also known as k-forms or differential k-forms6This is consistent with Λ0R0∗ ∼= R

34CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Lemma 13. Basis for the k-(co)vector fields)Given any basis b1, . . . bn of Rn and P ⊂ Rn denote by bI ∈ Ωk(P ) the constant k-covector
field defined by bI(p) =∧i∈I b
i. Any ω ∈ Ωk(P ) can uniquely be expressed as ω =∑I fIb
I forfI ∈ Ω0(P ) and the sum ranges over all k-element subsets I ⊂ 1, . . . n. Likewise any Cm k-vectorfield on P may be expressed uniquely as
∑I fIbI for Cm-functions fI on P .
Proof. For any p ∈ P we have ω(p) ∈ ΛkRn∗. By Lemma 12 there must exist numbers fI(p) ∈ Rsuch that ω(p) =
∑I fI(p)b
I . The functions p 7→ fI(p) defined this way are C1 because they are
the components of the C1-function Pω−→ ΛkRn∗, see property 4 of Theorem 1 with respect to the
basis formed by the bI . The case for k-vector fields is similar.
Sometimes it is convenient to figure out the coefficient functions fI of some unknown ω =∑I fIb
I by intersecting with the dual basis bI . Recall I(bI , bJ) = 0 unless I = J in which case we
get 1. Therefore fI(p) = I(bI , ω(p)) for any p ∈ P .k-covector fields naturally arise as integrands and also as certain derivatives of ordinary func-
tions. For example important 1-covector fields are provided by the derivative of a function:
Definition 12. (differential of a function)Define for any f ∈ Ω0(P ) the 1-covector field df ∈ Ω1(P ) by df(p) = f ′(p).
This 1-covector plays the role of the ’gradient’ ∇f , in the sense that its level sets are locallythose of f . More precisely, using an inner product, 1-covector fields may also be written in termsof vector fields by setting ω(p)v = X(p) · v. In particular we claim df(p)v = ∇f(p) · v for all vectorsv and p ∈ P (Exercise!).
The differential also demystifies the dx from calculus. Viewing x as the function on say R2 thatsends any vector to its first coordinate, its differential is dx, just a 1-covector field. Since our x isa linear function we have dx(p) = e1 for all p ∈ R2. Below we will see that this definition fits wellwith our integrals. More generally, denote the function on Rn that extracts the i-th coefficient ofa vector as xi, so really xi = ei ∈ Rn∗. Then dxi(p) = ei for all p. As before set dxI =
∧i∈I dx
i
for some I ⊂ 1, . . . n. The above lemma 13 then says that any k-covector field is a sum of termsfIdx
I . This is how they often appear implicitly in calculus texts as integrands. There one writesdxdy instead of the more correct dx ∧ dy and usually also abuses notation by using x for both thefirst coordinate and the function extracting the first coordinate.
The formula for the differential can be written in terms of the basis dx1, . . . dxn as followsdf =
∑i∂f∂xi
dxi (Exercise!). This is a formula that is often used in calculus but now it actuallymakes sense as expansion of 1-covectors.
3.3.1 Integration
Integration is defined much like the familiar case of line integrals. In a line integral one integratesa covector field over a curve by plugging in the velocity vector at each point and summing upthe results. In general we integrate a k-covector field along a ’k-dimensional parametrized curve’
[0, 1]kγ−→ Rn by again plugging in the derivative at each point. Plugging in now means intersecting
using I. We call γ a (singular k-) cube.
Definition 13. (Integral of k-covector)Define the integral by ∫
γ
ω =
∫[0,1]k
I(γ′, ω(γ))

3.3. (CO)-VECTOR FIELDS AND INTEGRATION 35
where [0, 1]kγ−→ P is a C1 function (singular cube) and ω ∈ Ωk(P ). The integrand is shorthand for
the function t 7→ I(γ′(t), ω(γ(t))).
A typical line integral would be if we set say γ(t) = (cos t, sin t) and ω(x, y) = −(x2 + y2)e2.Then
∫γω =
∫[0,1]−e2(− sin t, cos t) =
∫[0,1]− cos t = − sin 1.
For example take the 2-covector ω ∈ Ω2(R3) defined by ω(x, y, z) = (x + y)e1 ∧ e3 we can
integrate this over a square parametrized by [0, 1]2γ−→ R3 defined by γ(s, t) = (s+ t2, t,−s). Then
the integral∫γω is computed as follows. Notice [γ′(s, t)] = b1 ∧ b2 = 2te1 ∧ e3 + e1 ∧ e2 + e2 ∧ e3
where b1 = (1, 0,−1) and b2 = (2t, 1, 0). Therefore the integrand I(γ′(s, t), ω(γ(s, t))) can becomputed as I(b1 ∧ b2, (s+ t2 + t)e1 ∧ e3) = 2t(s+ t2 + t) so in the end we get an ordinary integral∫
[0,1]22t(s+ t2 + t) =
∫[0,1]
t+ 2t3 + 2t2 = 53 .
In our new notation the usual fundamental theorem of calculus for line integrals, 1-covector
fields, is as follows: For any Pf−→ R and C1 curve γ we have∫
γ
df = f(γ(1))− f(γ(0))
Unwinding the definitions this is just a restatement of the usual fundamental theorem since∫γdf =∫
[0,1]I(γ′(·), df(γ(·))) =
∫[0,1]
f ′(γ(·))(γ′(·)) =∫
[0,1](f γ)′(·) = f(γ(1))− f(γ(0)).
As with usual k-covectors we may transfer k-covector fields by pulling them back along a map
Pϕ−→ Q. In practice this just comes down to plugging in the equations for ϕ and differentiating.
Definition 14. (Pull-back on covector fields)
For a map Pϕ−→ Q we have a pull-back Ωk(Q)
ϕ∗−−→ Ωk(P ) defined by (ϕ∗ω)(p) = (ϕ′(p))∗ω(ϕ(p)).In the special case k = 0 of functions we define ϕ∗f = f ϕ for f ∈ Ω0(P ).
As an example consider polar coordinates: P = (0,∞)× (0, 2π) 3 (r, t)ϕ7−→ (r cos t, r sin t) ∈ Q,
where Q is R2 minus the positive x-axis, and ω ∈ Ω2(Q) is given by ω(x, y) = (x − y)e1 ∧ e2. Bydefinition (ϕ∗ω)(r, t) = r(cos t − sin t)ϕ′(r, t)∗(e1 ∧ e2). Since e1 ϕ′(r, t) = cos te1 − r sin te2 ande2 ϕ′(r, t) = sin te1 + r cos te2 we get ϕ′(r, t)∗(e1 ∧ e2) = [(e1, e2) ϕ′(r, t)] = [(e1 ϕ′(r, t), e2 ϕ′(r, t))] = (e1 ϕ′(r, t))∧ (e2 ϕ′(r, t))) = (cos te1− r sin te2)∧ (sin te1 + r cos te2) = re1 ∧ e2 so wefound (ϕ∗ω)(r, t) = r2(cos t − sin t)(e1 ∧ e2). Beware that we used e1, e2 to denote the dual basisin both the domain and the range. One often sees this computation done in terms of dx, dy anddr, dt instead, just plugging in the formulas of ϕ for x, y to express dx and dy in terms of dr, dt bydifferentiating. The end result would now look like ϕ∗((x− y)dx ∧ dy) = r2(cos t− sin t)dr ∧ dt.
The pull-back is what transforms the integrands correctly when changing coordinates:
Lemma 14. (Substitution lemma)
For ω ∈ Ωk(Q) and Pϕ−→ Q a C1 function we have∫
ϕγω =
∫γ
ϕ∗ω
Proof. By definition the integral on the left hand side means∫ϕγ
ω =
∫[0,1]k
I((ϕ γ)′, ω(ϕ γ))

36CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Setting ω(ϕ γ(t)) =∑ci[C
i] for some Ci ∈ ΛkRn∗ we see that the integrand equals (use thechain rule) I((ϕ′(γ(t))γ′(t), ω(s)) =
∑i ci det(Ci ϕ′(γ(t))γ′(t)) =
∑i ciI(γ′(t), Ci ϕ′(γ(t))) =∑
i ciI(γ′(t), ϕ′(γ(t))∗Ci) = I(γ′(t), (ϕ∗ω)(γ(t))) which is precisely the integrand on the right handside.
The pull-back fits well with compositions, we have ϕ∗ ψ∗ = (ψ ϕ)∗ for any C1 functions
Pϕ−→ Q
ψ−→ R. Exercise! Also pull-back and wedge commute: ϕ∗∧si=1 η
i =∧si=1 ϕ
∗ηi because thisis true pointwise. For functions f ∈ Ω0(P ) taking pull-back also commutes with the differential:dϕ∗f = ϕ∗df . This follows from the chain rule (Exercise).
Finally a word about our geometric interpretation. Recall we visualize a k-covector by consid-ering its level sets, which are affine hyperplanes of codimension k. For a k-covector field ω ∈ Ωk(P )we can do the same at every point p ∈ P . One can imagine that the hyperplanes move and curve
as we move p. Given a singular k-cube [0, 1]kγ−→ P the interpretation of
∫γω is much like the
interpretation of the intersection map I itself: At every point p we may ask how many times thelevel set of ω(p) intersect the image of γ or rather its linear approximation γ′(p).
In terms of the level sets, the pull-back is simply applying the linear transformation ϕ′(p) toall the level sets at that point. The substitution lemma expresses the fact that derivative scaleseverything correctly so that the intersections in P or in Q are counted the same. While perhaps notprecise enough to count as proof such visual arguments can help getting a sense of what is goingon and serve as an antidote to the rather heavy notation used in this subject.
Exercises
Exercise 1For ω ∈ Ω2(R4) defined by ω(x, y, z, w) = (x+ z)dx1(x, y, z, w)∧ e3 + (y+w)e2 ∧ e4 and the 2-cubeγ given by γ(s, t) = (s, 2t, t,−3s) compute the integral
∫γω explicitly.
Hint: The dx1(x, y, z, w) is just to show off. It can safely be replaced by ei for some i, (which i?)
Exercise 2
Define the gradient of a C1 function Rn ⊃ P f−→ R as ∇f =∑ni=1
∂f∂xi
ei. Prove that for any v ∈ Rn
and p ∈ P we have ∇f(p) · v = (df(p))(v). Also show that for any C1 curve γ in a level set of fwith γ(0) = p the velocity vector γ′(0) is perpendicular to ∇f(p) and is in ker df(p).
Exercise 3Define (0,∞) × (0, 2π) 3 (r, t)
ϕ7−→ (r cos t, r sin t) ∈ R2. Let x, y ∈ R2∗ be the dual basis to thestandard basis and r, t the dual basis in the domain of ϕ.
a. Compute ϕ∗(dx) and d(ϕ∗x) explicitly from the definitions.
b. Compute∫γη with η = rdt and γ is the 1-cube defined by γ(s) = (s, s).
c. Compute∫αω with α(u) = (u cosu, u sinu) and ω = −y√
x2+y2dx+ x√
x2+y2dy by expressing it
as the integral of a pull-back along ϕ.
Note that in this exercise we follow the common abuse of notation using the symbols r, t for boththe coordinates of a point and also the dual vectors reading off these coordinates. The 1-covectorfield η defined loosely by rdt is really sending point p to e1(p)e2 ∈ Λ1R2∗ = R2∗.

3.4. MORE ON CUBES AND THEIR BOUNDARY 37
3.4 More on cubes and their boundary
We would like to have a version of the fundamental theorem of calculus that says: integration ofthe derivative over a cube is integration of the function on the boundary of that cube. For examplein one dimension we have
∫[a,b]
f ′ = f(b)− f(a). It is tempting to write the last integral as∫a,b f
since a, b is the set of boundary points of the interval [a, b] however that way we will miss thecrucial minus sign. The boundary needs to be oriented so that point a carries a minus sign andb a plus sign. Also boundary of the interval is not described by a single cube but rather by two,corresponding to its two faces.
Notice we are talking about cubes as if they are actual geometric cubes but in reality our cubesare maps [0, 1]k → Rn. Nevertheless it still makes sense to speak about faces, using the domain ofthe maps.
Definition 15. (Faces)The standard k-cube is the identity Ik : [0, 1]k → Rk. The faces of the standard k-cube are (k− 1)-cubes in Rk indexed by i ∈ 1, . . . n and σ ∈ 0, 1 defined by Ik(i,σ)(x) = Ik(x1, . . . , σ, . . . xk) with
the σ in the i-th place. For a general k-cube γ : [0, 1]k →M we define the faces γi,σ = γ Iki,σ.
Figure 3.3: The standard cube I2 and its faces.
The boundary of a k-cube is the union of all these faces. Instead of union we prefer to writeit as a linear combination. This is convenient for keeping track of their orientations and makessense once we start integrating over the faces. The integral over the boundary will be the sum ofthe integrals over the faces anyway. In this context formal combinations of cubes are referred to achains.
Definition 16. (k-Chain) A k-chain is a finite formal linear combination of k-cubes. The integralis extended to k-chains by
∫aγ+bγ
ω = a∫γω + b
∫γω.
For example the boundary of the standard 1-cube I1 (interval [0, 1]) are the endpoints 0 and1 where the first gets a minus sign and the second a plus sign. Written as a 0-chain the boundaryof I1 will be the 0-chain −(0 7→ 0) + (0 7→ 1) a formal sum of maps from [0, 1]0 = 0 to [0, 1].Likewise the boundary of the unit square is a sum of four terms [0, 1]×0, 1× [0, 1], [0, 1]×1and 0 × [0, 1]. Taking the orientations such as in figure 3.3 we write the 1-chain version of theboundary of I2 as −I2
1,0 − I22,1 + I2
1,1 + I22,0. In general we define the boundary of the standard
k-cube to be the (k − 1)-chain
∂Ik =
k∑i=1
∑σ∈0,1
(−1)i+σIki,σ

38CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
More generally we define the boundary of a k-chain by
Definition 17. (Boundary) The boundary of the k-cube γ is then ∂kγ =∑ki=1
∑σ∈0,1(−1)i+σγi,σ.
The boundary of the chain∑i aiγi is by definition
∑i ai∂kγi.
Whenever the dimensions are clear from the context we will drop the subscript and write ∂ forall boundary maps. The boundary of the boundary is always zero, for example in the picture wesee each of the four vertices appear twice in the expression for ∂∂I2, once with a plus sign and oncewith a minus sign. This is true in general too.
Lemma 15. (Boundary of boundary)For all chains γ we have ∂∂γ = 0.
Proof. Exercise.
This lemma is the starting point of the subject of homology in algebraic topology. For anyspace X the k-th homology is the vectorspace of all k-chains in X that have no boundary modulothose that are the boundary of something. By the previous lemma this definition actually makessense. More precisely the k-th homology of X is defined to be Hk(X) = ker ∂k/im∂k+1 where thesubscript indicates the dimension of the chains we are to apply ∂ to.
Exercises
3.5 Exterior derivative
At each point p ∈ P ⊂ Rn we imagine the k-covector ω provides a stack of codimension k-hyperplanes in some direction with a certain intensity. We can now ask how ω varies with p.In particular we can imagine the hyperplanes rotate a bit and to increase the intensity new planesneed to be added every now and then. Planes that get added have to start somewhere at a certaincodimension k + 1 stack of planes. Indeed if a codim k-plane ends, it ends on a k + 1 codim plane.This is what the exterior derivative does: it describes at each point the direction and intensity ofthe planes that start at that point. The notation is dω and it is a (k + 1)-covector field.
To be more concrete we recall that any k-covector field may be expressed in terms of the constantk-covector fields eI multiplied by functions, see lemma 13. It suffices to define the exterior derivativefor such k-covector fields and this can be done in using the differential of the functions:
Definition 18. (Exterior derivative)Define d : Ωk(P )→ Ωk+1(P ) by d(
∑I fIe
I) =∑I dfI ∧ eI .
This definition may seem to depend on the particular basis of Rn we are using but this is notthe case. The following lemma shows that the exterior derivative has many good properties thatmake it a respectable operation:
Lemma 16. (properties of d)
Assume α, ω ∈ Ωk(Q) and Pϕ−→ Q ⊂ Rm a C1 map between open sets.
1. d(α+ ω) = dα+ dω
2. d(fω) = (df) ∧ ω + f ∧ dω for any f ∈ Ω0(Q)

3.5. EXTERIOR DERIVATIVE 39
3. ddω = 0 for all k-covector fields that are C2.
4. For βi ∈ Ω1(P ) we have d∧mi=1 β
i =∑mj=1(−1)j−1
∧i ηij with ηij =
βi if i 6= j
dβi if i = j
5. ϕ∗dω = dϕ∗ω
Proof. Properties 1) follows directly from the definition. For the next property we use the productrule d(fg) = (df)g + fdg. Setting ω = gIe
I we get dfω = d(fgI) ∧ deI = (df)gI ∧ eI + fdgI ∧ eI =dfω + fdω. The general case follows by summing over all possible I. By linearity and part two 3)just needs to be proved for ω = fη with dη = 0 a constant k-covector. We know dω = df ∧ η. Since
df =∑i∂f∂xi
ei we have ddω = d∑i∂f∂xi
ei ∧ η =∑i d( ∂f∂xi ) ∧ e
i ∧ η =∑i,j(
∂2f∂xi∂xj
∧ ej ∧ ei ∧ η = 0
because the partial derivatives commute, see lemma 3.1 and ei ∧ ej = ej ∧ ei.Next for 4) it suffices to consider the case βi = fie
ki for some functions fi. Then d∧i β
i =(d(f1 . . . fm))∧
∧i eki =
∑mj=1(dfje
kj )∧∧i6=j fie
ki using the product rule for the differential. Then
moving the factor dfjekj to the j-th position proves the statement.
The last property follows from the chain rule when k = 0. For the general case it suffices totake ω = feI and use 4) and 3): d(ϕ∗feI) = d((f ϕ) ∧
∧i∈I ϕ
∗ei) = (d(ϕ∗f)) ∧ ϕ∗eI = ϕ∗d(feI).The other terms appearing from applying part 4) vanish because dϕ∗ei = dϕ∗dei = ddϕ∗ei = 0. Inthe last equality we used the k = 0 case.
Thinking of k-covectors by their level sets, in a k-covector field ω we may ask how the levelsets of ω(p) vary with p. Intuitively at least we may attempt to connect the level sets of ω(p) andω(q) when p and q are close. In case there are more level sets around p, some of them must havebeen created in going from p to q. The exterior derivative describes where these new level sets arecreated.
For example compare the two equations d(xdy) = dx ∧ dy and d(ydy) = 0 on R2. Visualizingthe level sets of dy is easy: just horizontal lines, at every point we have the same number of them.The level sets of xdy are similar horizontal lines but now they get more dense as we increase thex-coordinate. This means we cannot connect the lines, going to the right, more and more linesappear. How many and where? Precisely one for each level set of dx ∧ dy which is a uniform gridof points in the plane. In contrast the level sets of ydy have the same horizontal direction but nowthey get more dense as we go higher in the y-direction. This way it is no problem to connect upthe level sets without the need to create more lines along the way.
In one sentence then, our intuitive interpretation of the exterior derivative dω is that it describesthe boundaries of the level sets of ω. Keeping this interpretation in mind the above propertieshopefully look more natural.
Exercises
Exercise 1In this exercise we identify the complex plane with R2. Let x, y ∈ R2∗ be the dual basis to thestandard basis of R2 so that dx, dy ∈ Ω1(R2). If we define dz = dx + idy and set f(x, y) =u(x, y) + iv(x, y), explain how the Cauchy-Riemann equations are equivalent to d(fdz) = 0. Com-pute
∫γ
1zdz where γ(t) = (cos 2πt, sin 2πt) is a parameterization of the unit circle. Why does your
answer imply that there is no element of g ∈ Ω0(R2) such that dg = Im( 1zdz)?

40CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
Exercise 2For x, y, z the dual standard basis of R3 verify that curlf = d(f1dx+f2dy+f3dz) for any C1 vectorfield f = f1e1 + f2e2 + f3e3.
3.6 The fundamental theorem of calculus (Stokes Theorem)
Finally we are ready to prove the most important part of the fundamental theorem of calculus,known as Stokes theorem. It is the part that relates the integral of the derivative to the integralon the boundary.
Theorem 4. (Fundamental theorem of calculus (Stokes Theorem))For ω ∈ Ωk−1(P ) and γ any k-chain we have
∫γdω =
∫∂γω
Proof. We start with a proof of the simplest case where γ is the standard k-cube Ik in Rk. Also,assume ω = feJ for some ordered k− 1-tuple J excluding a single index j from 1. . . k. In that casewe can explicitly compute the left hand side (below we comment on what was done at each step):∫
Ikdω =
∫Ikdf ∧ eJ = (−1)j−1
∫[0,1]k
∂f
∂xj(·)e1...k = (−1)j−1
∫[0,1]k
∂f
∂xj(·) (3.10)
= (−1)j−1
∫[0,1]k−1
(∫[0,1]
∂f
∂xj
)= (−1)j−1
∫[0,1]k−1
(f Ikj,1 − f Ikj,0) (3.11)
In the first step we computed the exterior derivative using the definition. In the second step weexpanded df =
∑i∂f∂xi
ei and used ei ∧ eJ = δij(−1)je1...k. In the third step we used the theoremof Fubini to first integrate in the j direction. In the fourth step we carried out the integral in thej direction using the 1d fundamental theorem of calculus.
Next we turn to the right hand side and compute:∫∂Ik
ω =∑i,σ
(−1)i+σ∫Iki,σ
ω =∑i,σ
(−1)i+σ∫
[0,1]k−1
I(Iki,σ′, ω(Iki,σ)) =
1∑σ=0
(−1)j+σ∫
[0,1]k−1
f Iki,σ
(3.12)
The first step is the definition of boundary of the standard cube. The second equality is thedefinition of the integral. Next we notice that the derivative satisfies [Iki,σ
′] = e1...i,...k and the hat
means i is ommitted. Also recall ω(Iki,σ) = (f Iki,σ)eJ . Therefore the intersection can be computed
using I(eI , eJ) = 0 unless I = J and then we get 1. This explains the final equality and finishes
the proof of the special case.Finally we explain how the general case reduces to the case we just treated. First we may reduce
to the case of k-cubes γ since both ∂ and the integral are additive. Given any k-covector field ω wehave ∫
γ
dω =
∫Ikγ∗(dω) =
∫Ikd(γ∗ω) =
∫∂Ik
γ∗ω =
∫∂γ
ω
The third equality comes from expressing γ∗ω as a sum of instances of the above special case wherewe integrate fJe
J .

3.6. THE FUNDAMENTAL THEOREM OF CALCULUS (STOKES THEOREM) 41
As a simple example consider η ∈ Ω2(R5) given by η(x, y, z) = −xe2∧e3+ze1∧e2 and the 2-cubeγ(s, t) = (cos 2πs)e1 + (sin 2πs)e2 + te3. The integral
∫γη is simplified once we notice that η = dω
with ω(x, y, z) = zxe2. Using Stokes we get∫γη =
∫∂γω = −
∫γ1,0
ω+∫γ1,1
ω+∫γ2,0
ω−∫γ2,1
ω. The
first two integrals cancel out equal because γ1,0 = γ1,1. The third integral is 0 because ω(γ2,0) = 0and finally the last integral is equal to −
∫[0,1]I(γ′2,1(s), ω(γ2,1(s))) = −
∫[0,1]I(−2π sin 2πse1 +
2π cos 2πse2, cos 2πse2) = −2π∫
[0,1]cos2 2πs = −π.
The usual integral theorems of Gauss and Stokes from vector analysis in R3, mentioned at thebeginning of the chapter, follow directly from our more general Stokes theorem. Using the innerproduct one identifies both the 1- and 2-covector fields with ordinary vector fields in R3. Underthis identification gradient, curl and divergence are all instances of the exterior derivative so ourStokes theorem can be applied.
Stokes theorem gives a more conceptual expression for the exterior derivative as an infinitesimalversion of this theorem.
Lemma 17. (Exterior derivative is a co-boundary)For any B ∈ L(Rk,Rn) we denote the k-cube given by t 7→ εB(t) + p by B.
I(B, dω(p)) = limε→0
ε−k∫∂B
ω
Proof. Indeed by Stokes theorem
ε−k∫∂B
ω = ε−k∫B
dω = ε−k∫t∈[0,1]k
εkI(B, dω(p+t)) ∈ [ mint∈[0,1]k
I(B, dω(p+t)), maxt∈[0,1]k
I(B, dω(p+t))]
using property 2 of lemma 5. Taking the limit of the right hand side gives I(B, dω(p)).
The significance of this lemma is that since we know the intersection of dω(p) with any B ∈L(Rk,Rn) we have determined dω(p). Logically speaking we could even have used this formula asthe definition of the exterior derivative. We chose not to do so because it makes the derivationsmore complicated but it does give useful intuition for what d is.
Exercises
Exercise 1Recall one can interpret the exterior derivative intuitively in terms of level sets as follows, see theend of section 3.5. The level sets of dω(p) are the places where the new level sets of ω(p) appear atp. Can you give an interpretation of Stokes theorem in terms of level sets?
Exercise 2If ω, η ∈ Ωk(P ) and γ is a k-cube such that dω = dη. Is it true that
∫γω =
∫γη?
Exercise 3Define θ ∈ Ω2(R3 − 0) by θ(p) = e1(p)e2∧e3+e2(p)e3∧e1+e3(p)e1∧e2
|p|3 . Show that dθ = 0 and also∫γθ = −4π where γ(s, t) = (cos 2πs sinπt, sin 2πs sinπt, cosπt) defines a 2-cube γ. Explain why
there cannot be a 3-chain β such that ∂β = γ.

42CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?
3.7 Fundamental theorem of calculus: Poincare lemma
The Stokes theorem is only one part of the fundamental theorem of calculus. The part telling ushow to integrate the derivative. The other half is known as the Poincare lemma. It provides a wayto find a primitive, to write your integrand as a derivative. More specifically it answers the questionwhether or not ω ∈ Ωk(P ) is of the form ω = dα for some α ∈ Ωk−1(P ). We call α the primitive orpotential.
Suppose dω 6= 0 then we cannot have ω = dα because then 0 = ddα = dω 6= 0 by lemma 16.So a necessary condition for finding a primitive is to have dω = 0. The Poincare lemma states thatwhen the domain P is simple this condition is actually sufficient.
Theorem 5. (Poincare lemma)Suppose P ⊂ Rn is an open set such that for any p ∈ P , P contains the line segment connecting 0and p. If ω =
∑I ωIe
I ∈ Ω(P ) is a k-covector field with dω = 0 defined on a disk then dα = ω and
α(x) =∑I
(∫[0,1]
tk−1ωI(tx)
)k∑g=1
(−1)g−1xigeI−ig
where x = (x1 . . . xn) ∈ P .
Proof. The condition dω = 0 means that we have ∂∂xu
ωI =∑kg=1(−1)g−1 ∂
∂xigωI|ig 7→u . To show
that dα = ω it suffices to prove that the coefficient of eI in dα is ωI . Differentiating the xig forg = 1 . . . k gives the contribution k
∫[0,1]
tk−1ωI(xt) and differentiating the integral gives
∑u
k∑g=1
∫[0,1]
tk(−1)g−1(∂
∂xigωI|ig 7→u)(xt)xu =
∑u
∫[0,1]
tk(∂
∂xuωI)(xt)xu = (3.13)∫
[0,1]
tk∑u
xu(∂
∂xuωI)(xt) =
∫[0,1]
tkd
dtωI(xt) (3.14)
Together the terms form precisely∫
[0,1]ddt t
kωI(xt) = ωI(xt) finishing the proof.
Lemma 18. (Invariance under reparameterization of cubes)
Suppose [0, 1]kϕ−→ [0, 1]k is a C1 function such that ∂ϕ = ∂Ik. Then
∫γϕ ω =
∫γω for any k-cube
γ and ω ∈ Ωk(P ).
Proof. Find α such that dα = ω using the Poincare lemma on the cube. This is possible becauseby definition a C1-function on [0, 1]k is defined on a slightly larger product of open intervals P =(−ε, 1+ε)k for some ε > 0 satisfying the requirements of the lemma. Also, dω = 0 since Λk+1Rk∗ =0. Then using Stokes we find
∫γϕ ω =
∫ϕγ∗ω =
∫ϕdγ∗α =
∫∂ϕγ∗α =
∫∂Ik
γ∗α =∫Ikγ∗dα =∫
Ikγ∗ω =
∫γω.
Exercises
Exercise 1For each of the k-covector fields ω below either find an α ∈ Ωk−1 such that dα = ω or prove thatit cannot be done.

3.7. FUNDAMENTAL THEOREM OF CALCULUS: POINCARE LEMMA 43
a. ω ∈ Ω2(R2 − 0) given by ω(p) = e1 ∧ e2.
b. ω ∈ Ω3(R4 − 0) given by ω(p) = e1(p)e1 ∧ e2 ∧ e4 + e1(p)e2(p)e2 ∧ e3 ∧ e4.
c. ω ∈ Ω1(R2 − 0) given by ω(p) = −e2(p)e1+e1(p)e2
|p|2 .
d. ω ∈ Ω1(((−1, 1)2) given by ω(p) = −e2(p−q)e1+e1(p−q)e2|p−q|2 and q = (2, 2).

44CHAPTER 3. IS THERE A FUNDAMENTAL THEOREM OF CALCULUS IN HIGHER DIMENSIONS?

Chapter 4
Geometry through the dot product
So far none of our constructions used the dot product of Rn in any essential way. In this chapterwe will explore how geometric notions arise from the inner product. Instead of just the Euclideangeometry, much more general curved spaces can be described if we allow the inner product to varyas we move in space. We start by recalling some essential linear algebra.
4.1 Vector spaces with a scalar product
In this section we work with an n-dimensional real inner product space V with inner product〈·, ·〉 : V × V → R. Recall that a basis of V really is a linear isomorphism b ∈ L(Rk, V ) and thatwe often use the abbreviation bi = b(ei). An orthonormal basis b of V means that 〈bi, bj〉 = δij forall i, j = 1, . . . n. The Gram-Schmid algorithm allows us to produce orthonormal bases.
Definition 19. (Orthogonal transformations)An element M ∈ L(V, V ) is said to be orthogonal if it preserves the inner product: 〈Mv,Mw〉 =〈v, w〉. The set of all orthogonal transformations is denoted O(V ).
Reflections and rotations are examples of orthogonal transformations. Here we focus on reflec-tions since they are easier to understand.
Definition 20. (Reflection)Given a unit vector m ∈ V we define the reflection Rm ∈ O(V ) by Rmm = −m and Rmv = v forall v ⊥ m.
The vector m is the normal vector to the hyperplane that acts as the mirror. An explicit formulafor the reflection is Rmv = v − 2m〈m, v〉. As expected a reflection is its own inverse and havedeterminant −1. Perhaps less expected is that reflections generate all orthogonal transformationsand thus relate all orthonormal bases.
Lemma 19. (Reflections generate)Any two orthogonal bases of V are related by an element of O(V ). Such elements may be writtenas a composition of finitely many reflections. If R fixes a k-dimensional subspace then it is thecomposition of at most n− k reflections.
45

46 CHAPTER 4. GEOMETRY THROUGH THE DOT PRODUCT
Proof. If b, c : Rn → V are orthogonal bases then there exists an R ∈ O(V ) with c = R b. Wecheck that 〈Rv,Rw〉 = 〈v, w〉, it suffices to do this for v, w basis elements of the basis b and then itis clear by orthogonality of ci = Rbi.
For the last statement we argue by induction on n− k. When n− k = 0 we must have R = idV .For the induction step, suppose R fixes a k-dimensional subspace U and Rv = w 6= v. ThenR v−w|v−w|
R fixes a k + 1-dimensional subspace spanned by v and U . This is because v − w is
orthogonal to U (why?) so by the induction hypothesis the proof is complete.
Conjugating by a relfection has the same effect as reflecting the mirror itself. More precisely:RwRmRw = RRw(m). To check this is true it suffices to say that both sides send Rw(m) to itsnegative and both sides fix its orthogonal complement.
Definition 21. (Orientation)Define an equivalence relation on the set of all bases of V : Bases b, c are said to have the sameorientation if det c−1 b > 0. An orientation on V is a choice of an equivalence class of bases.
Lemma 20. (Volume n-vector)For any two orthonormal bases b, c we have [b] = ±[c] ∈ ΛnV where the sign is 1 iff the orientationsare the same.
Proof. Since b, c are related by a finite number of reflections and each reflection reverses orientationwe just have to prove the lemma in the case ci = Rmbi for some reflection given by unit vectorm =
∑i wibi. [c] =
∧iRmbi =
∧bi − 2wwi =
∧i bi(1− 2|w|2) = −[b].
For example when V = R3 with the standard inner product and e is the standard basis then[e] = e1 ∧ e2 ∧ e3.
As a consequence we see that if we fix the orientation, a volume element n-vector is uniquelydetermined. Its dual [b]∗ will be used a lot in the next section to define lengths, areas and volumesby integration.
Going one step further we define a complementary (n − k)-vector to each k-vector in V calledthe Hodge star. It is convenient to refine our notation a little and define for any sequence I ofelements of 1 . . . n and any basis b the element bI =
∧i∈I bi where the wedge is in the order of
the sequence I. Previously we defined for a set S the element bS to be the wedge product taken inincreasing order.
Definition 22. (Hodge star)For any orthonormal basis b define ?b : ΛkV → Λn−kV by bI ∧?bbI = [b] for all k-element sequencesI ⊂ 1, . . . , n and extend linearly.
More concretely this means that ?bbI = σ(IJ)bJ where J is an (n − k)-element sequence in1, . . . , n such that the concatenation of the sequences (IJ) is a permutation of 1 . . . n with signσ(IJ). For example when V = R3 with the standard inner product and e is the standard basis then?ee1 = e2 ∧ e3 and ?ee2 = e3 ∧ e1 also ?e1 = [e] = e1 ∧ e2 ∧ e3 and ?ee3,2 = −e1.
Just like for the volume n-vector the Hodge star actually does not depend on the chosen basis,only the orientation matters.
Lemma 21. (Hodge star)For any two orthonormal bases b, c we have ?b = ±?c, where the sign is 1 iff the orientations arethe same.

4.2. RIEMANNIAN GEOMETRY 47
Proof. As in the proof of the lemma for the volume element, may assume that ci = Rmbi for somereflection given by unit vector m =
∑i wibi. We need to prove that ?ccI = − ?b cI for any sequence
I ⊂ 1, . . . n.Choose a sequence J complementary to I, and notice (ij)J is complementary to (ij)I, where
(ij) is the permutation permuting i and j. The right hand side is
−?bcI = −?bbI(1−2∑i∈I
w2i )+2?b
∑i∈I,j∈J
b(ij)I = −σ(IJ)bJ(1−2∑i∈I
w2i )+2
∑i∈I,j∈J
σ((ij)I(ij)J)wiwjb(ij)J
The left hand side is
?ccI = σ(IJ)cJ = σ(IJ)cJ(1− 2∑j∈J
w2j )− 2σ(IJ)
∑i∈I,j∈J
wiwjb(ij)J
The first terms are equal because 1 = |w|2 =∑i∈I w
2i +
∑j∈J w
2j . The second terms are equal
because σ(IJ) = −σ((ij)I(ij)J).
When the orientation is clear we will simply write ? instead of ?b for the Hodge star.Finally we transfer our constructions to covectors in V since those will be integrated in the next
section. The inner product on V gives in particular a basis-independent isomorphism VΦ−→ V ∗
sending v to 〈v, ·〉. In terms of an orthonormal basis b we have Φ(bi) = bi. Identifying V ∗∗ with Vas usual, we get an isomorphism Φ∗ : ΛkV → ΛkV ∗. For orthonormal bases it just sends bI to bI .This way we obtain a Hodge star ΛkV ∗
?−→ Λn−kV ∗ by ?bI = σ(IJ)bJ much like the above.
Exercises
Exercise 1 (Rotations in R2)A rotation is a composition of two reflections. The angle of the rotation Rm Rw is twice the anglebetween m and w.
a. Prove that if two rotations have the same angle then they must be equal elements of O(R2).Hint. If you dont want to just write things out on a basis maybe you can solve b first and conclude that the composition of any three
reflections is a reflection. From this it follows that conjugating a reflection by a rotation inverts the rotation. Conjugating by a suitable
reflection sends one of your rotations to the inverse of the other one.
b. Show that an element of O(R2) is either a reflection, a rotation or the identity.
c. Given a rotation in R ∈ O(R2) is it true that R∗ ? e1 = ?R∗e1?
4.2 Riemannian geometry
In this section we study some consequences of the existence of an inner product at each point. Thisis usually known as Riemannian geometry and the inner product is called the metric (not in thesense of metric spaces!).
Definition 23. (Riemannian Metric)A metric on open set P ⊂ Rn is a choice of inner product g(p) : Rn×Rn → R for each point p ∈ P .The pair of an open set and a metric is denoted as (P, g). We say the metric is Ck if for all Ck
vector fields X,Y on P we have p 7→ g(p)(X(p), Y (p)) is a Ck function on P .

48 CHAPTER 4. GEOMETRY THROUGH THE DOT PRODUCT
Of course the most important metric is the standard Euclidean metric gEucl(p) = 〈., .〉 the usualdot product for all p ∈ P . Another interesting metric is the hyperbolic metric on the half planeH = R× R>0 given by ghyp(x, y) = 1
y2 gEucl. The pair (H, ghyp) is known as the hyperbolic plane.
In an open subset with a Riemannian metric (P, g) we may define length and angles as usual:Given two 1-cubes β, γ intersecting at β(q) = γ(q) = p ∈ (P, g) the cosine of the angle α
between β, γ is cosα = g(p)(β′(q),γ′(q))√g(p)(β′(q),β′(q))g(p)(γ′(q),γ′(q))
. The length of a 1-cube is the integral
L(γ) =∫
[0,1]
√g(·)(γ′(·), γ′(·)). For example in the hyperbolic plane the length of the vertical
line between (0, a) and (0, b) given by the 1-cube γ(t) = (t(b − a) + a)e2 with a < b is given byL(γ) =
∫[0,1]
b−at(b−a)+adt = log b− log a. Also notice that angles in the hyperbolic plane are just the
Euclidean angles.
Figure 4.1: An Escher-like tesselation of the hyperbolic plane H (left) and the same picture in thePoincare disk model D (right). All devils are the same size! And H and D are isometric.
Metrics can also be transferred by pull-back much like 2-covector fields.
Definition 24. (Pull-back metric)
Given a C1 map Pϕ−→ Q such that ϕ′(p) is injective for all p ∈ P , and a metric g on Q we may
define a metric ϕ∗g on P by (ϕ∗g)(p)(v, w) = g(ϕ(p))(ϕ′(p)v, ϕ′(p)w).
The derivative of ϕ is required to be injective in order to ensure non-degeneracy of the pulledback inner product (Exercise).
Pulling back the Euclidean metric provides a way to precisely measure the shape of objects we
see around us. This is the literal meaning of the word geometry. Given a function R2 ⊃ Pϕ−→ R3
with ϕ′(p) injective for all p we get a metric ϕ∗gEucl on P describing the shape ϕ(P ) in terms ofthe parameters P . Calculating on P is usually easier than working in the ambient space R3.
For example we may take the sphere and geographic coordinates P = (−π2 ,π2 )×(−π, π) and P 3
(µ, λ)ϕ7−→ (cosλ sinµ, sinλ sinµ, cosµ) ∈ R3. Here µ is the latitude coordinate and λ the longitude,
for example Leiden is the point ϕ(52.1601, 4.4970) π180 written in degrees. Explicitly the inner
product ϕ∗gEucl is given by calculating it at every point for the basis vectors e1, e2. Since the matrix
for ϕ′(p) is
cosλ cosµ − sinλ sinµsinλ cosµ cosλ sinµ− sinµ 0
we get ϕ∗gEucl(p)(e1, e1) = 1, ϕ∗gEucl(p)(e1, e2) = 0,
ϕ∗gEucl(p)(e2, e2) = sin2 µ.

4.2. RIEMANNIAN GEOMETRY 49
Now that we have some interesting examples of metrics we will start transferring the linearalgebra from the previous section to the Riemannian setting. Since we will be working with or-thonormal bases we have to apply the Gram-Schmid algorithm to get an orthonormal basis for g(p)at every point p ∈ P .
Definition 25. (Volume n-covector field)An orientation on P ⊂ Rn is a choice of an orientation of Rn at each point p ∈ P . Given g ametric on P and an orientation, define νg ∈ Ωn(P ) by setting νg(p) = [b(p)]∗ where b(p) is anorthonormal basis with respect to the inner product g(p) that agrees with the chosen orientation.
For example in the sphere example the volume 2-covector field in µ, λ coordinates must be(sinµ)e1 ∧ e2 because a positive orthonormal basis is e1, (sinµ)−1e2. Volume is now defined byintegrating the volume covector field.
Definition 26. (Volume)The volume of a k-cube γ in (P, g) is the integral
∫[0,1]k
νγ∗g
The case k = 1 coincides with the length of a curve defined earlier. We should be carefulhowever that this is really signed volume because when we orient our cube in the opposite directionthe volume will be negative. We also note that the volume of a cube does not depend on the chosenparameterization because of lemma 18.
Definition 27. (Isometry)
An isometry is a diffeomorphism that preserves the metric in the following sense. (P, g)ϕ−→ (Q, g)
is an isometry if g = ϕ∗g.
Since all geometric properties derive from the metric, isometries can be thought of as thosetransformations that preserve shape.
For example the (Poincare) disk model D = (u ∈ C : |u| < 1) with metric g(u) =(
21−|u|2
)2
gEucl(u).
Here as usual we identify R2 and C. Now we claim that D φ−→ H given by φ(u) = u+iiu+1 is an isometry.
Here we also identified the upper half plane H with a subset of C.
To verify this we compute using complex numbers as much as possible to avoid lengthly ex-pressions. First we use the fact that for a complex differentiable function f : C → C we mayidentify the derivative (a linear transformation in L(R2,R2)) with multiplication by f ′(z). Alsoidentifying a vector v by a + ib the Euclidean inner product becomes 〈v, w〉 = Revw. Themetric on H is then written as ghyp(z)(v, w) = Revw
(Im(z))2 . The pull back of this metric along
φ becomes φ∗ghyp(u)(v, w) = Reφ′(u)vφ′(u)w(Im(φ(u)))2 = |φ′(u)|2
(Im(φ(u)))2 Re(vw) = |φ′(u)|2(Im(φ(u)))2 gEucl(u). Finally
|φ′(u)|2 = 4|iu+1|4 and Imφ(u) = 1−|u|2
|iu+1|2 finishing the computation.
A similar computation shows that isometries of the hyperbolic plane H are given by the linearfractional tranformations z 7→ az+b
cz+d where a, b, c, d ∈ R and ad − bc = 1. In fact these are allorientation preserving isometries but we will not show this here.
Definition 28. (Hodge star)
The Hodge star on an oriented (P, g) is the map Ωk(P )?−→ Ωn−k(P ) defined pointwise by (?ω)(p) =
?(ω(p)).

50 CHAPTER 4. GEOMETRY THROUGH THE DOT PRODUCT
For example the pull-back of the Euclidean metric in spherical coordinates (µ, λ) had orthonor-mal basis b1(µ, λ) = e1, b2(µ, λ) = (sinµ)−1e2 at point (µ, λ). With dual basis b1(µ, λ) = e1 andb2 = sinµe2. Therefore the Hodge star is ?b1 = b2.
The Hodge star allows us to formulate some of the fundamental partial differential equations ina truely geometric way. Many of the famous fundamental partial differential equations involve theLaplacian ∆. For example the Laplace equation ∆u = 0, the Poisson equation ∆u = f , the heatequation, the wave equation, the diffusion equation, the Schodinger equation, the Klein-Gordonequation, the Helmholtz equation, the Maxwell equation and the Navier-Stokes equation.
Definition 29. (Hodge Laplacian)
A choice of metric g and orientation on P defines for all k the Laplacian Ωk(P )∆k
−−→ Ωk(P ) by∆kω = (?d ? d+ d ? d?)ω
As a basic example take Rn with the Euclidean metric. Viewing a C2 function Rn f−→ R asan element of Ω0(P ) we see that ?f = f [e] ∈ Ωn(Rn) and so d ? f = 0. Also df =
∑i∂f∂xi
e1 so
?df =∑i∂f∂xi
(−1)i∧j 6=i e
i and d ? df =∑i
∂2f(∂xi)2
[e] and so ∆0f =∑i
∑i
∂2f(∂xi)2
. So our Laplacian
is a very complicated (but geometrically natural!) generalization of the sum of the second partialderivatives.
If we allow ourselves to use the Minkowski metric on P = R4 (not positive definite) then theequation ∆2 = 0 is precisely Maxwell’s equations (in the absence of charges). Also ∆0 = 0 is thewave equation.
The famous Hodge conjecture (one of the million dollar problems) basically says that all har-monic k-covector fields with rational coefficients on a complex non-singular complex manifold cor-respond to complex submanifolds of dimension k. So what are manifolds?
Exercises
Exercise 1(Area of a Hyperbolic disk)We work with the Poincare disk model D. As usual we identify C with R2.
a. Identifying u = x + iy ∈ D with (x, y) ∈ R2 show that the hyperbolic metric on D is givenby g(x, y) = 4
(1−x2−y2)2 gEucl. Give an orthonormal basis for R2 with respect to the inner
product g(x, y).
b. Show that the volume 2-covector field νg ∈ Ω2(D) may be written as νg(x, y) = 4(1−x2−y2)2 e
1∧e2.
c. Using the 2-cube γ : [0, 1]2 → D given by γ(s, t) = (rs cos 2πt, rs sin 2πt) compute the area ofthe disk with Euclidean radius 0 < r < 1 by A(r) =
∫γνg.
d. Show that the length of the 1-cube β : [0, 1] → D given by β(t) = (0, rt) is R = log 1+r1−r and
that r = tanh R2 .
e. Assuming the length of β was the hyperbolic radius of the disk with Euclidean radius r showthat the area of the disk with hyperbolic radius R is 4π sinh2 R
2 .

Chapter 5
What if there is no good choice ofcoordinates?
So far we’ve studied spaces and functions on them in a fixed coordinate system. This is comparableto doing linear algebra in a fixed basis (bad idea). For example the level sets X = F−1(q) westudied in chapter 2 can be expressed as the graph of a function as long as we stay sufficiently closeto some p ∈ X. In the case of the sphere F (x, y, z) = x2 + y2 + z2 and q = 1. To describe the
sphere near the north pole we can use D2 3 (x, y)G+37−−−→ (x, y,
√1− x2 + y2) ∈ S2, where D2 ⊂ R2
is the open unit disk. Near the south pole we need the other square root: D2 3 (x, y)G−37−−−→
(x, y,−√
1− x2 + y2) ∈ S2. Points on the equator are more conveniently described by one of the
four maps D2 3 (x, y)G±27−−−→ (x,±
√1− x2 + y2, y) ∈ S2. D2 3 (x, y)
G±17−−−→ (±√
1− x2 + y2, x, y) ∈S2. Transitioning between these descriptions is not hard because to get back we just projectfor example G−1
1 (a, b, c) = (b, c) and so G−11 G2(x, y) = (
√1− x2 + y2, y). This leads us to
an atlas of the sphere consisting of six disks D±i = D2 and transition functions between them.τij = G−1
j Gi : Di ∩ G−1i (Dj) → Dj ∩ Gi(Di) all given by some all given by the square roots as
above.
5.1 Atlasses and manifolds
Before we begin we should note that our definitions of manifold and atlas are slightly different fromthe one usually found in the literature. They are equivalent but somewhat more concrete, thushopefully allowing a quicker entry into the essence of the subject. In the exercises the reader isinvited to prove the equivalence.
Definition 30. (Atlas)An m-dimensional Ck atlas is a family of non-empty open sets (charts) Mα ⊂ Rmα∈A togetherwith a family of Ck-diffeomorphisms (transitions) between open subsets
Mα ⊃Mαβ
ταβ−−→Mβα ⊂Mβα,β∈A, indexed by some set A. We furthermore require that ∀α, β, γ ∈
A:
1. ταβ = (τβα )−1 ταα = id|Mα .
51

52 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
2. τγα τβγ ταβ = id, whenever the composition is defined.
Atlasses are often meant to describe some particular space. The space is the equivalence classof points on the charts where two points are equivalent if they are related by a transition map. Tomake sense of such spaces topologically recall the definition of quotient topology.
Definition 31. (Quotient topology)Given a topological space X and an equivalence relation ∼, the quotient X/ ∼ is the set of equivalence
classes. The map Xq−→ X/ ∼ sending each point to its equivalence class is called the quotient map.
X/ ∼ becomes a topological space by declaring a subset U ⊂ X/ ∼ to be open if q−1(U) is.
For example take X = [0, 1] ⊂ R with the standard (subspace) topology and set 0 ∼ 1. ThenX/ ∼ is homeomorphic to a circle. A homeomorphism is for example given by g : [0, 1] → R2
defined by g(t) = (cos 2πt, sin 2πt).An important property of the quotient topology is that a continuous function on X/ ∼ is
precisely a continuous function on X that always takes the same value on equivalent points of X.Atlasses provide many more examples of quotient spaces. The same point can be described
differently on each chart of the atlas but the transition functions tell us it’s still the same point. Ifthe quotient is a nice topological space we call it a manifold.
Definition 32. (Manifold)Given an m-dimensional Ck atlas Mαα∈A we define its quotient space as M =
⊔α∈AM
α/ ∼where x ∼ y if ∃α, β ∈ A : y = ταβ (x).We say the atlas defines a manifold M when M has the following topological properties:
1. Hausdorff,
2. Every point has a neighborhood homeomorphic to Rm,
3. Has a countable basis for its topology.
In what follows we will often speak about manifolds as topological space M . However thereader should remember our manifolds always are intended to come with a specific atlas whosequotient is the topological space M . So by an m-dimensional Ck-manifold we really mean a nicem-dimensional Ck-atlas. Much of what we will say below actually works for quotients of atlassesthat are not necessarily manifolds. The Hausdorff property is chosen to ensure uniqueness of limitsand having a countable basis allows partitions of unity, see section 5.4.
Setting A = 0 and M = M0 any open subset of Rm yields a simple example of an m-dimensional C∞ manifold.
A more interesting example is the circle T described by A = 0, 1 and charts T1 = T0 =
(−1, 1) ⊂ R and T01 = T1
0 = (−1, 0) ∪ (0, 1) and transitions τ01 (t) = τ1
0 (t) =
t− 1 if t > 0
t+ 1 if t < 0.
T is compact because it is the image of the compact sets [− 12 ,
12 ] ⊂M0 and [− 1
2 ,12 ] ⊂M1 under
the quotient map q. To identify T with the usual unit circle S1 it is convenient to use the factthat a continuous bijection from a compact space to a Hausdorff space must be a homeomorphism.Consider the maps f0 : T0 → S1 and f1 : T1 → S1 given by f0(t) = (cosπt, sinπt) and f1(t) =(cosπ(t + 1), sinπ(t + 1)). They show how the two charts of T describe overlapping parts of thecircle. Notice that f1(t) = f0(τ1
0 (t)) and so the pair f1, f0 defines a continuous map f : T → S1.It is a bijection and the inverse is also continuous because S1 is Hausdorff and T is compact.
Let us emphasize that the abstract circle T is much simpler than the one sitting in the plane!

5.1. ATLASSES AND MANIFOLDS 53
Lemma 22. (Coordinate patches)For every α ∈ A the quotient map q of an atlas restricts to a homeomorphism between Mα andq(Mα) ⊂M .
Proof. No two points of Mα are equivalent under the equivalence relation of definition 32 so qrestricts to a continuous bijection between Mα and q(Mα). To show it is a homeomorphism itsuffices to prove that for any open set U ⊂ Mα the image q(U) is also open. By the quotienttopology we should check that q−1q(U) ∩Mβ is open in Mβ for every β ∈ A. We may assumethis intersection is non-empty so suppose x ∈ q−1q(U) ∩Mβ . Then q(x) ∈ q(Mα) so there exists ay ∈Mα with y = τβα (x). Since the transition maps τ are all homeomorphisms, we may take an openneighborhood y ∈ V ⊂ U ∩Mα
β . Its image W = ταβ (V ) satisfies q(W ) ⊂ q(U) and x ∈W ⊂Mβ soq(U) is open.
Using the above lemma one often pretends Mα is the same as q(Mα) ⊂M to simplify notation.We will try to refrain from this here.
Definition 33. (Local description of maps between manifolds)Suppose M has atlas Mαα∈A and N has atlas Nββ∈B. The local description of a continuous
map Mf−→ N is the set
Mα,β fα,β−−−→ Nβ |α ∈ A, β ∈ B
where Mα,β = Mα ∩ f−1q(Nβ) and fα,β = q−1|Nβ f q.
In practice one often does not start with a function between manifolds but rather tries toconstruct one by patching together local descriptions. The next lemma gives the conditions weneed to check to do this.
Lemma 23. (How to define functions locally)Suppose M,N are manifolds as in the previous definition. A family continuous maps
Mα,β fα,β−−−→ Nβ |α ∈ A, β ∈ B
is the local description of a continuous map Mf−→ N if and only if Mα,β ⊂Mα and
⋃β∈BM
α,β =
Mα and ∀α, γ ∈ A, ∀β, δ ∈ B we have fγ,δ ταγ = τβδ fα,β.
Proof. The only if part is clear by definition (Exercise!) so we focus on the if part here. First wecheck that for each fixed α ∈ A the fα,β define a map fα : Mα → N such that fα q−1
Nβ= fα,β .
Define fα(x) = fα,β(x) for any β such that x ∈ Mα,β . This does not depend on the choice ofβ since q fα,δ(x) = q fα,β(x) for any δ ∈ B with the same property as β. Collecting all fα
into a map f :⊔α∈AM
α → N . Since the value of f must be the same for any two equivalentpoints, the universal property of the quotient topology gives a continous map f : M → N such thatf = f q.
For example recall the atlas for the circle T with two charts T0,T1 described in this section.
A map T f−→ T wrapping the circle around itself twice has the following local description: T0,0 =

54 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
(−1, 1) − ± 12 and f0,0(t) =
2t if |t| < 1
2
2t− 2 if t > 12
2t+ 2 if t < − 12
. And T0,1 = (−1, 1) − 0 and f0,1(t) =
2t− 1 if t > 0
2t+ 1 if t < 0. Likewise T1,1 = T0,0 and f1,1 = f0,0 and T1,0 = T0,1 and f1,0 = f0,1.
Functions between manifolds may be differentiated in terms of their local descriptions too. Bythe chain rule the following definition makes sense.
Definition 34. (Ck maps between manifolds)
A map Mf−→ N between Ck-manifolds is said to be Ck if all maps in the local description are Ck.
A Ck map is said to be a Ck diffeomorphism if it is a bijection and the inverse is Ck as well.
For example, the map T f−→ T doubling the angle as described above is a C∞ diffeomorphism.Suppose two atlasses have the homeomorphic quotients, the resulting manifolds may or may not
be Ck diffeomorphic. If they are then we can take the union of the atlasses and the diffeomorphismsbetween the charts to get a bigger atlas with the same quotient. In such a way there is a maximalatlas describing the topological space. Of course such an atlas is not practical to work with but itclarifies the role of atlasses.
Surprising things happen in dimension four. According to a theorem of Donaldson, there areinfinitely many non-diffeomorphic C∞ manifolds homeomorphic to Rn if and only if n = 4. Thefamous smooth Poincare conjecture poses the same question for the sphere Sn. It is currentlyunknown whether there exists fake S4, i.e. a manifold homeomorphic but not diffeomorphic to thefour sphere. Milnor proved there do exist fake 7-spheres.
Exercises
Exercise 1 (Mobius strip)The strip is the quotient space M = [−1, 1]× (−1, 1)/ ∼ where (1, y) ∼ (−1,−y) for all y ∈ (−1, 1).The bottle is K = [−1, 1]2/ ∼ where (1, y) ∼ (−1,−y) and (x, 1) ∼ (x,−1).
a. Give two maps φ1, φ2 : M → K such that φi is a homeomorphism onto φi(M) and K −(φ1(M) ∪ φ2(M)) is homeomorphic to a circle and φ1(M) ∩ φ2(M) = ∅.A picture is sufficient to get points, providing the homeomorphisms will give you bonus points.
b. Provide a 2-dimensional C3 atlas whose quotient space is homeomorphic to M . Here you doneed to give the homeomorphism.
Exercise 2 (Non-Manifolds)Find an atlas whose quotient space is not a Hausdorff space. Also find an atlas whose quotientspace does not have a countable basis for its topology.
Exercise 3 (Product manifold)Given two manifolds M,N show how M×N naturally is a manifold too by taking the atlas definingM and the atlas defining N and taking the Cartesian product of each pair of charts Mα × Nβ .Show that taking the product of transition functions gives a new atlas whose quotient is M ×N .

5.2. EXAMPLES OF MANIFOLDS 55
Exercise 4 (Vector space as manifold)Imagine an n-dimensional vector space V and consider the set of all basesA = F ∈ L(Rn, V )| kerF =0. Show that we can define an atlas indexed by A with Mα = Mα
β = Rn for all α, β ∈ A and
ταβ = β−1 α. How does this turn V into a topological space?
Exercise 5 (Traditional definition of manifold)In the literature manifolds are usually defined in a slightly different way as follows. To make thetemporary distinction we call them T-manifolds. An m-dimensional Ck T-manifold is a second
countable Hausdorff space M together with for each p ∈ M a homeomorphism p ∈ U φ−→ V ⊂ Rmbetween open subsets such that for any two such homeomorphisms φ, ψ the map φ ψ−1 is a Ck-diffeomorphism.In this exercise you will check that the two definitions are really equivalent. To build an atlas froma T-manifold we take the charts to be the open sets V ⊂ Rm that are the target of the homeo-morphisms φ. The transition maps are just the φ ψ−1. In the other direction, given an atlas thelemma 22 gives us homeomorphisms Mα → q(Mα) ⊂ M . Their inverses are the φ we are lookingfor in the definition of T -manifold.
5.2 Examples of manifolds
The implicit function theorem tells us that solving equations leads to manifolds.
Theorem 6. (Manifolds from implicit function theorem)
Imagine Rk+n ⊃ PF−→ Rn is a C1 function and consider the level set L = F−1(z) for some
z ∈ Rn. If for all p ∈ L we have dim kerF ′(p) = k then L is a k-dimensional C1 manifold.
Proof. The fact that the kernel is k-dimensional for each p implies that there exist isomorphisms
Rk × Rnαp−−→ Rn+k and so the implicit function theorem provides C1 maps Xp
fp−→ Yp. The maps
Xp 3 xφp7−→ p + α−1
p (x, fp(x)) ∈ L are homeomorphisms onto their image. The inverse is simplyφ−1p (y) = πkα
−1(y − p) where πk is projection onto the first k coordinates.
Consider the atlas whose charts Xp are indexed by the points of p ∈ L. The transition mapsare τpt = φ−1
t φp. These are diffeomorphisms between Xpt = φ−1
p φt(Xt) and Xtp = φ−1
t φp(Xp).
If we view L ⊂ Rk+n with the subspace topology, it must be homeomorphic to the quotient Xof the atlas Xp|p ∈ L. The homeomorphism is defined by the maps φp. Taking balls with rationalradius and rational centers we see that L is second countable and of course it is also Hausdorff asa subset of Rk+n.
The atlas provided in the proof is rather large and mostly of theoretical value. In practice wecould have worked with fewer charts. In case L is compact even with finitely many because an opencovering suffices. Also if F is Ck one can also prove that the level sets are Ck as well.
A simple example of an atlas with two charts is the atlas M+,M− where M± = Rn andM+− = M−+ = Rn − 0 and τ+
− = τ−+ is given by τ+− (y) = y
|y|2 . Thinking of the stereographic
projections the quotient is actually homeomorphic to the n-sphere. Recall stereographic projectionfrom the north/south pole is the map Rn+1 ⊃ Sn 3 u σ7−→ u−en+1un+1
1±un+1∈ Rn with inverse σ−1(x) =

56 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
2x±en+1(|x|2−1)|x|2+1 . However as always the atlas is often simpler than the actual realization of the
sphere in Rn+1.The Cayley map provides an explicit way to parametrize part of the orthogonal group O(n) =
O(Rn), where we take Rn with the standard inner product. In terms of matrices O(n) consistsof matrices M of size n satisfying MMT = I. Define o(n) = X ∈ Mat(n, n)|XT = −X.The Cayley map is the map o(n) 3 X
C7−→ (1 + X)(1 − X)−1 ∈ O(n). It is well defined sincethe eigenvalues of elements of o(n) are purely imaginary and the determinant is the product ofthe eigenvalues so det(1 − X) 6= 0. To check the image is an orthogonal matrix we computeC(X)TC(X) = (1 + X)(1 − X)−1(1 − XT )−1(1 + XT ) = (1 + X)(1 − X)−1(1 + X)−1(1 − X) =(1 +X)(1−X2)−1(1−X) = (1 +X)(1 +X)−1(1−X)−1(1−X) = 1. Looking at the determinantthe image is not the whole of O(n), just a neighborhood of 1. Actually the neighborhood can bedescribed precisely to be the set B of matrices with determinant 1 that have no eigenvalue −1. Weclaim C is a diffeomorphism from o(n) onto B with inverse C−1(M) = (M + 1)−1(M − 1).
A useful class of manifolds is the class where all transition functions are linear.
Exercises
Exercise 1 (Hyperbolic punctured torus)Consider the interior of the region B = z ∈ C| − 1 < Re(z) < 1, |z − 1
2 | >12 , |z + 1
2 | >12.
5.3 Analytic continuation
When describing level sets as manifolds we first have the level set and then produce from it anatlas using the implicit function theorem. By construction the quotient space of this atlas ishomeomorphic to the level set. It is not always like this. Often the atlas comes first and themanifold arises from it. The process of analytic continuation from complex analysis is a clearexample of this. Starting with a single holomorphic function defined on some subset of the complexplane one is naturally led to defining a 2-manifold. The manifold is the natural domain for theanalytic contination of our function. Riemann pioneered this field and so these manifolds are oftencalled Riemann-surfaces.
Definition 35. (Analytic atlas)
A holomorphic pair is a pair (U, f) where U ⊂ C is open and Uf−→ C is holomorphic. A set of
holomorphic pairs (Uα, fα)|α ∈ A defines an atlas by taking charts Uα|α ∈ A and settingUαβ = Uβα = z ∈ Uα ∩ Uβ |fα(z) = fβ(z) and ταβ = idUαβ .
It is not hard to see that the quotient space of any atlas coming from a set of holomorphic pairshas a quotient space that is both Hausdorff and second countable.
The analytic atlas is in some sense the right domain for the holomorphic function describedby the pairs in the atlas. We may speak about the function because of the identity theorem fromcomplex analysis. Recall it says that if two holomorphic functions defined on connected open setU agree on a subset S ⊂ U containing a limit point, they must agree on all of U .
The square root in the complex plane provides a good example of a non-trivial analytic atlas. Toset up the square root functions define for any θ the ray Aθ = reiθ ∈ C|r ≥ 0. For any z ∈ C−Aθthe argument Argθ(z) ∈ [0, 2π) of z is the positive angle between Aθ and the vector pointing to z.

5.3. ANALYTIC CONTINUATION 57
Define four holomorphic pairs (Uθ,±, fθ,±) where Uθ,± = C−Aθ and f±,θ(z) = ±|z| 12 e i2 (Argθ(z)+θ)
for θ ∈ 0, π. The resulting analytic atlas is as follows. We have Uθ,±θ,∓ = ∅ since there the
functions take opposite values. For Imz > 0 we have fπ,±(z) = f0,±(z) and for Imz < 0 we havefπ,±(z) = −f0,±(z). Therefore U0,±
π,± = z|Im(z) > 0 = Uπ,±0,± and U0,±π,∓ = z|Im(z) < 0 = Uπ,∓0,±
with transition functions equal to the identity.
The quotient of our atlas for the square root is two linked copies of C− 0, one copy for +√z
and one for −√z thus clarifying multivaluedness of the square root.
The logarithm can be treated similarly but this requires infinitely many holomorphic pairs asthe ambiguity is integer multiples of 2πi. For any n ∈ Z and θ ∈ 0, π define (Uθ,n, fθ,n) whereUθ,n = C − Aθ and fn,θ(z) = log |z| + i(θ + Argθ(z) + 2πn) for θ ∈ 0, π. As with the square
roots we can compute the analytic atlas as follows. Uθ,nθ,m = ∅ for n 6= m. When Imz > 0 we have
fπ,n(z) = f0,n(z) and when Imz < 0 we have fπ,n(z) = f0,n+1(z). Therefore
Uπ,n0,m = U0,mπ,n =
z|Imz > 0 if m = n
z|Imz < 0 if m = n+ 1
∅ otherwise
The quotient space of the atlas for the logarithm is an infinite spiral of copies of C − 0 gluedtogether. Ones for each branch of the logarithm.
In general one may always try to analytically continue any holomorphic pair as far as possibleusing Taylor expansion. To this end, recall that any holomorphic function can be expanded asa power series around any point in its domain. The radius of convergence of the power seriesf =
∑∞n=0 an(z − w)n around point w is the number Rf = lim infn |an|−
1n . If we denote the open
disk with center w and radius R by Dw,R then the series converges and is holomorphic on Dw,R.In other words (Dw,Rf , f) is a holomorphic pair.
Analytic continuation goes as follows. Start with a single holomorphic pair (U0, f0) where U0 isa disk. Choose a point w ∈ U0 close to its boundary and set f1 to be the power series of f0 aroundw. We get a new holomorphic pair (U1, f1) where U1 = Dw,Rf0
. By the identity theorem f1 = f0
on U0 ∩U1 but with some luck U1 is not contained in U0. This is what we mean by extending ourf0 analytically to a bigger domain.
There is no reason to stop after one step. Pick another point v ∈ U1 and expand f1 as aseries around v. As above this yields a third holomorphic pair (U2, f2) extending our function evenfurther and so on.
One way to structure the process of analytic continuation is to choose a path (1-cube) [0, 1]γ−→
C starting at a point inside the initial pair (U0, f0). Analytic continuation along the path ispossible in finitely many steps because of compactness of the image of γ. Studying how the analyticcontinuation depends on the choice of path naturally leads to the idea of fundamental group.
Coming back to analytic atlasses, they really come with a function into the complex numbersas follows (identifying C and R2 as usual):
Lemma 24. On the manifold U defined as the quotient of an analytic atlas coming from holomor-
phic pairs (Uα, fα), there is a C∞ function Uf−→ C whose local descriptions are the fα.
Proof. We may just apply lemma 23 noting the transitions are the identity precisely on the subsetswhere the functions from the pairs agree.

58 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
In this sense U really is a natural domain of the functions defined by the holomorphic pairs.In the theory of Riemann surfaces and complex manifolds one would define what it means for afunction on manifolds to be holomorphic and our f would be an example of such.
5.4 Bump functions and partitions of unity
Recall that the support of a function is the closure of the set where it takes non-zero values.
Lemma 25. (Bump functions)Given a point p in an open subset U in a Ck manifold M there exists a Ck function b : M → [0, 1]
with b(p) 6= 0 and support contained in U .
Proof. The function R η−→ R defined by η(t) =
e−1t t > 0
0 t ≤ 0is a C∞ function. So for every r > 0
and z ∈ Rn the function Rn f−→ R defined by f(x) = η(r2 − |x − z|2) has support inside the ballBr(z) with radius r centered at z.
Choose a chart Mα of the manifold such that q(z) = p and Br(z) ⊂Mα. The local descriptionof the function b we are looking for is bα,0 = f and bγ,0 = f τγα on Mγ
α and zero otherwise. Thismakes b well-defined by lemma 23 and Ck by the chain rule.
The essential tool for cutting and pasting differentiable objects is called partition of unity.
Definition 36. (Partition of unity)A Ck partition of unity with respect to an open covering of manifold M is a family of Ck functions
Mhi−→ [0, 1], i ∈ I such that
1. For all i ∈ I the function hi has support inside some set of the covering.
2. For every p ∈M there is a neighborhood V ⊂M such that hi|V = 0 for all but finitely manyi ∈ I.
3.∑i∈I hi = 1
One reason for demanding that are manifolds have a countable basis is that this allows partitionsof unity to exist.
Theorem 7. (Existence of partitions of unity)For any Ck manifold and any open covering a partition of unity exists.
Proof. First suppose M is compact. Using lemma 25 choose for every p ∈ M a bump functionbp with bp(p) > 0 each supported in some set of the open covering. By compactness of M theremust be points p1, . . . pn ∈ M such that M =
⋃ni=1 b
−1pj (0,∞). Our partition of unity will be the
functions hj = bpj/(bb1 + . . . bbn) for j = 1 . . . n.If M is not compact we use a countable basis Uii∈N for the topology of M to construct a
sequence K1 ⊂ K2 ⊂ · · · ⊂ M of compact subsets with Ki ⊂ int(Ki+1) and M =⋃iKi. First we
throw away any basis elements that do not have compact closure. The result still is a basis for thetopology (Exercise!). Now choose n1 < n2 < . . . such that Ki =
⋃i U
nii=1 ⊂
⋃ni+1
i=1 Ui.For each i finitely many bump functions ci1, . . . c
isi : M → [0, 1] can be chosen so that ci1 +
· · · + cisi > 0 for all x in the compact set Ki − int(Ki) and all supports fit in a member of the

5.5. VECTOR BUNDLES 59
open covering and inside open set int(Ki+1) −Ki−2. The function c =∑i,j c
ij is Ck and positive
everywhere on M so setting hij = cij/c gives the desired partition of unity.
Exercises
Exercise 1 (C∞ function)Prove that the function η from the text is indeed C∞.
5.5 Vector bundles
Vector bundles are a way to transfer linear algebra constructions in calculus to manifolds. Basicallywe want a vector space above every point in our manifold and all such vector spaces should fittogether smoothly as one walks in the manifold. Locally the structure should be the Cartesianproduct of manifold and vector space.
Definition 37. (Vector bundle)A Ck-manifold E is a vector bundle over Ck-manifold M with fiber a vector space V if the atlasEαα∈A of E is described in terms of the atlas Mαα∈A for M as follows. The charts areEα = Mα × V and Eαβ = Mα
β × V and the transition functions are εαβ = (ταβ , Lαβ) for some
Ck-functions Lαβ on Eαβ such that Lαβ(p, ·) is an invertible element of L(V, V ) for all fixed p.
The most basic vector bundle is a Cartesian product M × V for any manifold M and any finitedimensional vector space V . When all the Lαβ are the identity this is called the trivial vector bundle.
For example the cylinder S1×R. A less trivial example closely related to the cylinder is the Mobiusstrip. To construct the strip as a vector bundle over the circle with fiber R and base the circle T wetake charts Ei = Ti×R and overlaps E0
1 = E10 = T0
1×R = (−1, 0)×R∪(0, 1)×R. The new transition
map is defined as E01
ε01−→ E10 defined by ε01(t, v) = (τ0
1 (t), L01(t, v)) with L0
1(t, v) =
v if t > 0
−v if t < 0.
Lemma 26. (Vector bundles are manifolds)Any vector bundle E over an m-dimensional Ck manifold M is an m + dim(E)-dimensional Ck-
manifold and there is a Ck surjective map Eπ−→M with local description πα,β(p, w) = ταβ (p).
Proof. It follows from the description of the atlasses that a countable basis of M extends to acountable basis of E. If there is no single chart containing both points a, b ∈ E then we managed toseparate them already. If there is such a chart we use that this chart is a Hausdorff space Mα × Vto separate them there. The fact that every point of M has a neighborhood homeomorphic to Rmmeans every point of E has a neighborhood homeomorphic to Rm × E ∼= Rm+dim(E). The readershould check that the local maps are compatible by checking πγ,δ εαγ = τβδ πα,β . This followsfrom part 2 of the definition of atlas and the definition of the bundle transtion function ε.
One of the most important vector bundles is the tangent bundle of a manifold. It is basicallythe manifold together with a linear approximation (tangent space) at every point. The cylinderabove is for example the tangent bundle of the circle.
Definition 38. (Tangent bundle and derivative)Define the vector bundle TM to be the vector bundle over m-manifold M with fiber Rm with the

60 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
new transition functions determined by Lαβ(p, v) = ταβ (p)′v, where τ is a transition function of M .
Also, the derivative of a function Mf−→ N is a map TM
f ′−→ TN defined locally by (f ′)αβ(p, v) =
(fα,β(p), (fα,β)′(p)v).
Notice we defined the vector bundle TM to have transition functions εαβ(p, v) = (ταβ (p), ταβ (p)′v).In other words the tangent bundle TM of m-dimensional manifold M is a 2m-dimensional manifoldthat we can think of as follows. At every point we carry have a linear approximation or tangentspace with us. Usually a tangent plane to a surface M ⊂ R3 such as a sphere is thought of as aplane touching M at a point. TM does the same in case M is not necessarily a subset of any RN .
By the chain rule, the local descriptions of the derivative of function f in the above definitiongive rise to a global definition. Indeed differentiating the equality τβδ fα,β = fγ,δ ταγ at p showsthe extension to the tangent bundles is consistent.
Definition 39. (Section of bundle)
A C` section of a vector bundle E over M is a C` map Ms−→ E such that π s = idM . Define for
any chart Mα of M and the function Mα sα−→ V by sα,α(p) = (p, sα(p))
When the vector bundle is trivial a section always is the graph of some function Mf−→ V , so
s(p) = (p, f(p)). In other words, there is a bijection between the set of such sections and the setof functions M → V . The functions sα always determine the whole section since for every chartMα there is the corresponding chart Eα = Mα × V of the vector bundle. A section of the tangentbundle is usually known as a vector field on M . More generally we would like to introduce vectorbundles whose sections will be k-(co)vector fields on M .
More generally the bundles used to transfer our k-covectors to manifolds are the following.
Definition 40. (Wedge Bundles and their sections)Define the vector bundle ΛkTM∗ to be the vector bundle over m-manifold M with fiber ΛkRm∗ andtransitions given by Lαβ(p, v) = τβα
′(ταβ (p))∗v). Similarly the vector bundle ΛkTM has fiber ΛkRm
and its transition functions are given as Lαβ(p, v) = ταβ′(p))∗v in terms of the transitions ταβ of M .
A k-vector field on manifold M is a section of ΛkTM .A k-covector field on manifold M is a section of ΛkTM∗.The set of all C2, k-covector fields on M is called Ωk(M).
We will often jump back and forth between a section of a trivial vector bundle s : M →M × Vand a function f : M → V . The relationship is given by s(p) = (p, f(p)). This is convenientbecause right now we have two slightly different definitions of what a vector field X is on an openset P ⊂ Rm. According to chapter 3 this is a map X : P → Rm. But viewing P as an m-dimensionalmanifold (with an atlas with a single chart) a vector field is a section s : P → Λ1TP . With theabove identification the two will agree. The same goes for k-(co)vector fields on P .
The bundles Λ1TM and Λ1TM∗ are usually known as the tangent and the cotangent bundle andare written as TM and TM∗. In the above definition we used the following notion of push-forwardalong a linear map A ∈ L(V,W ). The push-forward A∗B of B ∈ L(Rk, V ) is given by A∗B = AB.
This extends to a map ΛkVA∗−−→ ΛkW . For k-vector Y on Q and an injective C1 map P
f−→ Qbetween open subsets of Rn,Rm we also define the push-forward as f∗Y (p) = f ′(f−1(p)).
Notice that a k-covector field ω is described on chart α using the function ωα which is a k-covector field on Mα. Covector fields on manifolds may be pushed forward much like their localcounterparts from chapter 3.

5.5. VECTOR BUNDLES 61
Definition 41. (Pull-back)
The pull-back by a C1 manifold map Mf−→ N is a map Ω(N)
f∗−→ Ω(M) defined in terms of the
local descriptions Mα,β fα,β−−−→ Nβ. On Mα,β we set (f∗ω)β = fα,β∗ωβ.
There is a similar notion of push-forward but it is not always defined when f is not injective.Just like in the case of open sets of Rn.
Exercises
Exercise 1 (Cone)Consider the 2-dimensional atlas C1, C2 with Ci = (x, y) ∈ R2|y > 0 and C1
2 = C21 = (x, y) ∈
C1|x 6= 0 and τ12 = τ2
1 = τ : C1 → C2 given by τ(x, y) =
(−y, x) if x > 0
(y,−x) if x < 0. Viewing the
interval X = (−1, 1) a manifold with a single chart X = X0 consider the function f : X → C givenon the atlasses by functions f0,i : X0,i → Ci and X0,1 = X, X0,2 = X − 0 f0,1(t) = (−t, 1) and
f0,2(t) =
(−1,−t) if t < 0
(1, t) if t > 0
a. Check that f does indeed define a differentiable function from X to C.
b. Explain why the tangent bundle TX is just X × R.
c. The tangent bundle TC has atlas with charts TCi = Ci×R2 and transition map TC1 ε−→ TC2
defined by (p, v) 7→ (τ(p), τ ′(p)v). Compute the derivatives (f0,1)′, (f0,2)′ and show how theycombine to give a well-defined map f ′ : TX → TC.
d. Describe the bundle projection π : TC → C explicitly in terms of the charts of the atlas.
e. Give an example of a C∞ vector field on C viewed as a section of the tangent bundle TC.
f. There is a bijective map h : C → R2 − (0, 0), where R2 − (0, 0) is viewed as a manifoldwith a single chart with index 0. On one chart h is given by h1,0(x, y) = (x2−y2, 2xy). Whatshould h2,0 be in order for h to be differentiable?
Bonus Explain how C really describes a cone (x, y, z) ∈ R3|z =√x2 + y2, z > 0 with the pull-back
of the Euclidean metric. C can be visualized by bringing together adjacent corners of a pieceof paper and τ just rotates the cone moving the cut by 180 degrees around the z-axis. On C1
this map is (x, y) 7→ (h1,0(x, y), x2 + y2).
Exercise 2 (Mobius strip is not orientable)Recall the Mobius strip M is a 2-dimensional C∞ manifold defined by the atlas M i|i ∈ 0, 1where M i = (−1, 1)× R and overlaps M0
1 = M10 = (−1, 0)× R ∪ (0, 1)× R. The transition map is
defined as M01
τ01−→M1
0 defined by τ01 (x, y) =
(x− 1, y) if x > 0
(x+ 1,−y) if x < 0.
In this exercise we aim to show that every continuous section s of Λ2TM∗ must take the value0 at some point of M . Suppose for a contradiction that there is a section s that never takes thevalue 0.

62 CHAPTER 5. WHAT IF THERE IS NO GOOD CHOICE OF COORDINATES?
a. On M i define the 2-covector field si by si,i(p) = (p, si(p)). More precisely by s taking thevalue 0 at some point we really mean that si(p) = 0 for some p. Show that the functionsfi : M i → R defined by fi(p) = I(e1 ∧ e2, s
i(p)) are continuous and have constant sign.
b. Explain why s1(p) = A∗s0(q) for all q, p ∈M10 with q = τ1
0 (p) and A = (τ10 )′(p).
c. Compute (τ10 )′(p) explicitly for all p ∈M1
0 .
d. Show that for any vector space V and k-covector C ∈ Λ2(V )∗ and k-vector B ∈ Λ2(V ) andlinear map A ∈ L(V, V ) we have I(B,A∗C) = I(A∗B,C).
e. Prove that for a = ( 12 , 0) and b = (− 1
2 , 0) we have f1(a) = −f0(b) and also f1(b) = f0(a).
f. Derive a contradiction to finish the argument.
Bonus Explain what this result has to do with non-orientability of M .
5.6 The fundamental theorem of calculus on manifolds
As before a k-cube in a manifold M is a C1-map [0, 1]kγ−→M . By definition of differentiability γ is
the restriction of a differentiable function defined on a bigger product of open intervals containing[0, 1]. To avoid heavy notation we will also write this interval as [0, 1]. As such it makes sense to
talk about the tangent bundle and derivative T [0, 1]kγ′−→ TM . The tangent bundle on the interval
is the trivial bundle [0, 1]k × R. Given ω ∈ Ωk(M) the pull-back γ∗ω along γ is a k-covector fieldon [0, 1]k.
We may thus define the integral as follows. The reader is warned that here we jump back andforth between viewing a k-covector field on [0, 1]k as a section of the wedge bundle and as a map[0, 1]k → Λk[0, 1]k
∗.
Definition 42. (Integration on manifolds)∫γ
ω =
∫[0,1]k
γ∗ω
The exterior derivative may be lifted to manifolds in terms of local descriptions.
Definition 43. (Exterior derivative on manifolds)For any k-covector field on manifold M define
(dω)α,β = dωα,β
The reader should check this is well-defined and satisfies the compatibility conditions of lemma23.
With all definitions in place, lifting the fundamental theorems of calculus to manifolds is rathersimple. The first part is Stokes theorem, the second is the Poincare lemma.
Theorem 8. (Fundamental theorem of calculus on manifolds)Suppose γ is a k-chain and ω is a C1, (k − 1)-covector field in manifold M . Then∫
γ
dω =
∫∂γ
ω

5.7. GEOMETRY ON MANIFOLDS 63
Moreover, For any C1, k-covector field η and any point p ∈ M there exists an open neighborhoodof p and (k − 1) covector field ω such that dω = η if and only if dη = 0.
Proof. The first part is proven using the fact that exterior derivative commutes with pull-back andStokes theorem on open subsets of Rm:∫
γ
dω =
∫[0,1]k
γ∗dω =
∫[0,1]k
dγ∗ω =
∫∂[0,1]k
γ∗ω =
∫∂γ
ω
For the second part, we recall that p has a neighborhood homeomorphic to Rm and we intersectit with chart Mα also containing p and choose an open ball B around p in this intersection. Onq−1B we may apply the usual Poincare lemma to get a ξ such that dξ = q∗η if and only if dη = 0.Define ω = q−1∗ξ on B.
Of course a specific formula for the ω from the Poincare lemma part of the theorem is availabletoo. Just pull back the formula on Rm. Using partitions of unity the (k− 1)-covector fields definedlocally may be patched together unless topological obstructions arise. Studying these obstructionsis part of de Rham cohomology.
5.7 Geometry on manifolds
Of course the idea of Riemannian metrics used to set up geometry in the previous chapter generalizesto manifolds as well. The local description of a metric g on manifold M is a family of metrics gα
on Mα that are compatible in the following sense (ταβ )∗gβ = gα. Of course we could reformulatethis in terms of sections of yet another type of vector bundles but we leave this to the imaginationof the reader.
To lift the Hodge star and volume form to manifolds we first need to recall the notion oforientation. An orientation on a vector space is a choice of one of the two equivalence classes ofbases. Two bases are equivalent if they are related by a linear map of positive determinant. Anorientation on an open P ⊂ Rm is a choice of an orientation of Rm at each point p ∈ P . Since wealready know how to extend m-vector fields to manifolds we reformulate the notion of orientationin terms of an ω ∈ Ωm(P ).
The field ω defines an orientation on PThe concept of orientation on an m-manifold M can be dealt with in terms of m-dimensional
covector fields on M .Another type of geometry is called symplectic geometry. A symplectic form is a 2-covector field
ω such that dω = 0 and at every point p ω(p) is non-degenerate. On the cotangent bundle there isa canonical 1-covector field. Its exterior derivative is an important example of a symplectic form.