INTRODUCTION TO COMPUTATIONAL...
36
I NTRODUCTION TO C OMPUTATIONAL T OPOLOGY Afra Zomorodian CS 468 – Lecture 1 1-14-4 Afra Zomorodian – CS 468 Lecture 1 - Page 1
Transcript of INTRODUCTION TO COMPUTATIONAL...
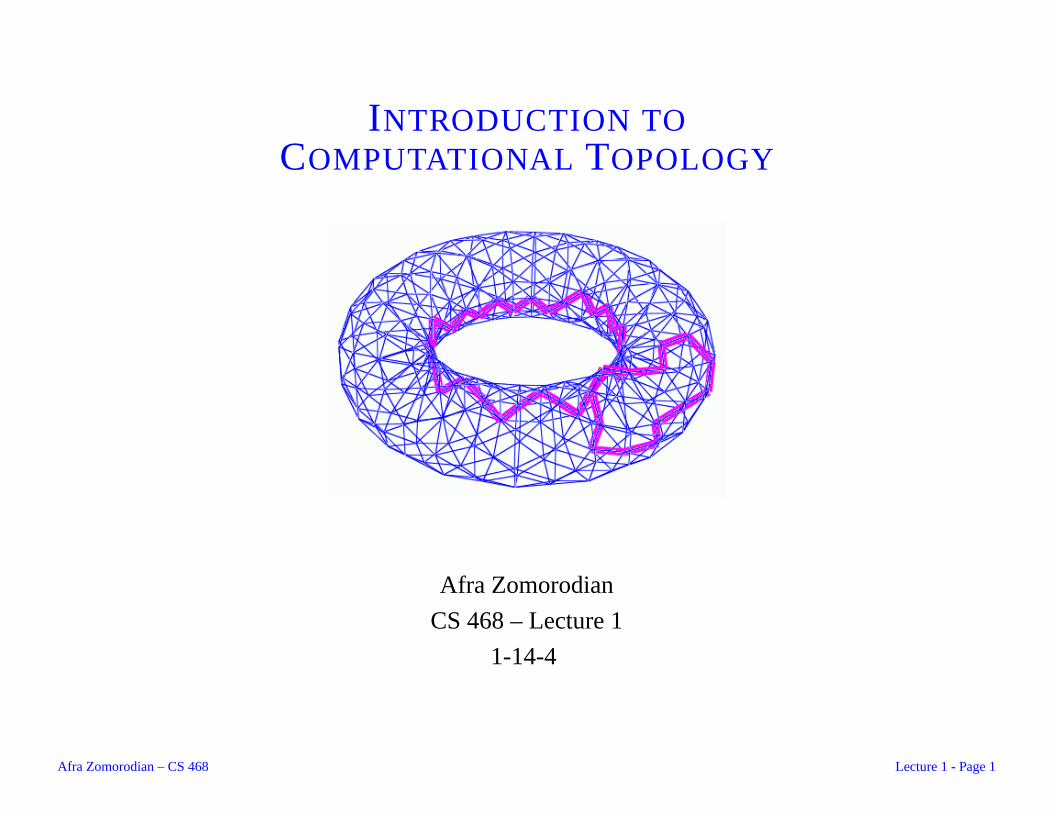
INTRODUCTION TOCOMPUTATIONAL TOPOLOGY
Afra Zomorodian
CS 468 – Lecture 1
1-14-4
Afra Zomorodian – CS 468 Lecture 1 - Page 1

ORGANIZATION
• Wednesdays, 12:30-2 PM, in Gates 392
• Lectures
• Papers
• Projects
Afra Zomorodian – CS 468 Lecture 1 - Page 2

WHY ORGANIZED?
• Topological problems arise in computer science
• We don’t know topology
• Topology is
– large
– unfamiliar
– axiomatic (therefore unintuitive)
– cryptic
• Goal: present background for computer scientists
• So, you can read papers!
Afra Zomorodian – CS 468 Lecture 1 - Page 3

WHAT IS TOPOLOGY?
• Not how things look (geometry)
• But how they areconnected
• Classifications
• Invariants
1. transform space in a fixed way
2. observe what stays the same
• Erlanger Programm (Felix Klein)
• Intrinsic vs. Extrinsic
Afra Zomorodian – CS 468 Lecture 1 - Page 4

MOTIVATIONGRAPHICS: SURFACE RECONSTRUCTION
Afra Zomorodian – CS 468 Lecture 1 - Page 5

MOTIVATIONGRAPHICS: TUNNELS
Afra Zomorodian – CS 468 Lecture 1 - Page 6
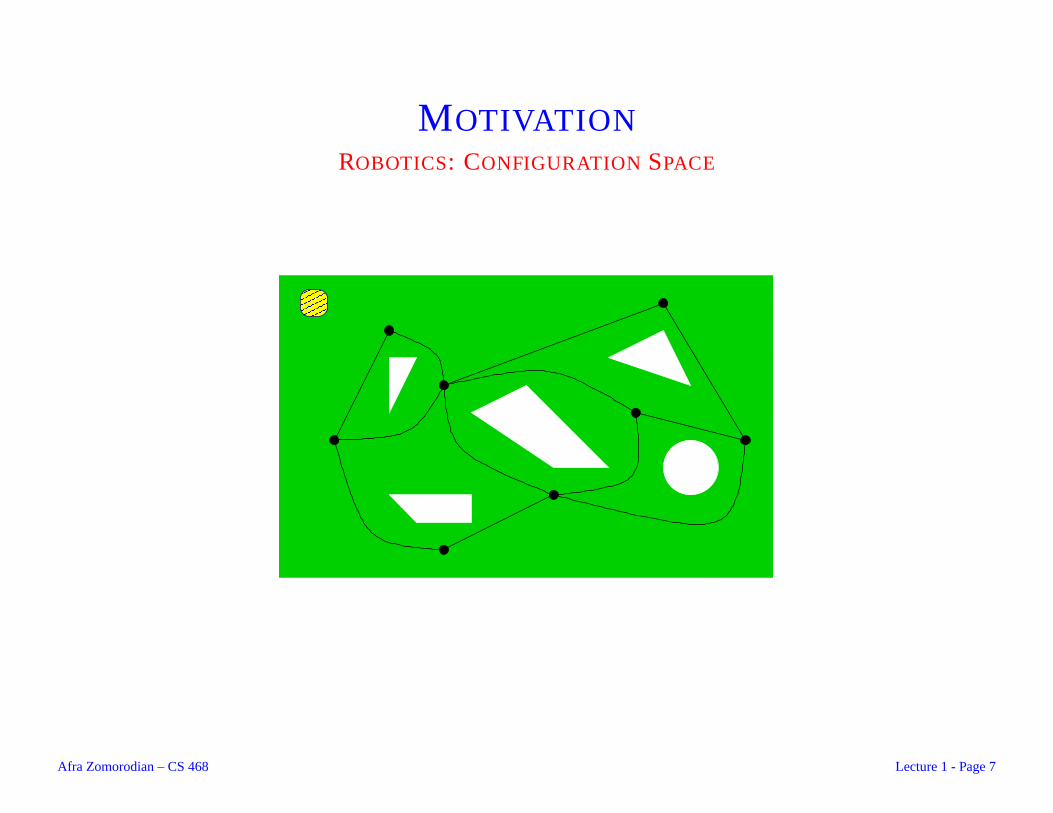
MOTIVATIONROBOTICS: CONFIGURATION SPACE
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������
������������
Afra Zomorodian – CS 468 Lecture 1 - Page 7

MOTIVATIONGEOGRAPHY: TERRAINS
Afra Zomorodian – CS 468 Lecture 1 - Page 8

MOTIVATIONBIOLOGY: STRUCTURE
Afra Zomorodian – CS 468 Lecture 1 - Page 9

MOTIVATIONCHEMISTRY: KNOTS & L INKS
Afra Zomorodian – CS 468 Lecture 1 - Page 10

POINT SET TOPOLOGY
Afra Zomorodian
CS 468 – Lecture 1
1-14-4
Afra Zomorodian – CS 468 Lecture 1 - Page 11
MOTIVATION
• Connectivity
• Neighborhoods
• f : D ⊆ R → R
• ε-δ definition: limx→x0 f(x) = y0 iff for all ε > 0, ∃δ > 0 such that
if x ∈ D and|x− x0| < δ, then|f(x)− y0| < ε.
• Mapping of open intervals
• Metric
Afra Zomorodian – CS 468 Lecture 1 - Page 12

SETS OFPOINTS
• A set is a well-defined collection of objects, such that
1. elementsa ∈ S.
2. oneempty set∅.
3. description:{x | P(x)} or {1, 2, 3}
4. well-definedif a ∈ S or a 6∈ S
• Point
Afra Zomorodian – CS 468 Lecture 1 - Page 13

TOPOLOGICAL SPACES
• Given setX
• TakeT ⊆ 2X such that:
1. If S1, S2 ∈ T , thenS1 ∩ S2 ∈ T .
2. If {SJ | j ∈ J} ⊆ T , then∪j∈JSj ∈ T .
3. ∅, X ∈ T .
• T is atopologyon setX
• S ∈ T is anopen set.
• Complement ofS is closed.
• All possibilities
• finite intersections, infinite unions
• The pair(X, T ) topological spaceX
Afra Zomorodian – CS 468 Lecture 1 - Page 14

CONTINUITY
fA
YX
−1f (A)
• f : X → Y
• Open setA in Y
• Supposef−1(A) is open inX.
• f is continuous
• f is amap
Afra Zomorodian – CS 468 Lecture 1 - Page 15

SET PROPERTIES
A ⊆ X
Afra Zomorodian – CS 468 Lecture 1 - Page 16

CLOSURE
(a)A ⊆ X (b) A
TheclosureA of A is the intersection of all closed sets containingA.
Afra Zomorodian – CS 468 Lecture 1 - Page 17

INTERIOR
(a)A ⊆ X (b) A
Theinterior A of A is the union of all open sets contained inA.
Afra Zomorodian – CS 468 Lecture 1 - Page 18
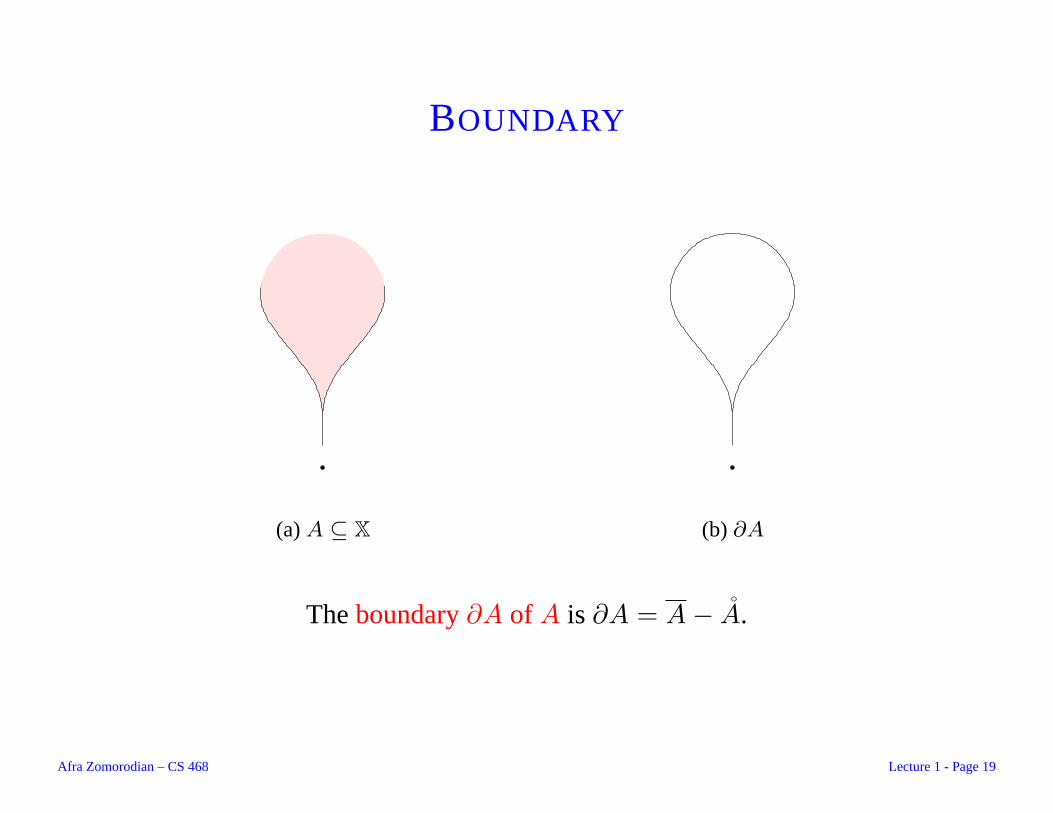
BOUNDARY
(a)A ⊆ X (b) ∂A
Theboundary∂A of A is ∂A = A− A.
Afra Zomorodian – CS 468 Lecture 1 - Page 19

NEIGHBORHOODS
• X = (X, T ), a topological space.
• x ∈ X
• A ∈ T such thatx ∈ A is aneighborhoodof x
• Suppose we have a collectionB of neighborhoods ofx
• Every neighborhood ofx contains a neighborhood inB
• We callB abasis of neighborhoods atx ∈ X
Afra Zomorodian – CS 468 Lecture 1 - Page 20

SUBSPACES
• X = (X, T ), a topological space.
• A ⊆ X, a subset
• TA = {S ∩ A | S ∈ T}
• TA is therelativeor inducedtopology
• A = (A, TA) is a topological space, asubspaceof X.
• Not the only topology possible (as we will see)
Afra Zomorodian – CS 468 Lecture 1 - Page 21

METRIC
• A metricor distance functiond : X ×X → R is a function that
satisfies:
1. For allx, y ∈ X, d(x, y) ≥ 0 (positivity).
2. If d(x, y) = 0, thenx = y (non-degeneracy).
3. For allx, y ∈ X, d(x, y) = d(y, x) (symmetry).
4. For allx, y, z ∈ X, d(x, y) + d(y, z) ≥ d(x, z) (the triangle
inequality).
• Euclidean metric: d(x, y) =√∑n
i=1(ui(x)− ui(y))2
Afra Zomorodian – CS 468 Lecture 1 - Page 22

METRIC SPACES
• Theopen ballB(x, r) with centerx and radiusr > 0 with respect to
metricd is defined to beB(x, r) = {y | d(x, y) < r}.
• A setX with a metric functiond is called ametric space.
• Endowed withmetric topologyof d, where the set of open balls
defined usingd serve as basis neighborhoods.
• The Cartesian product ofn copies ofR along with the Euclidean
metric is then-dimensional Euclidean spaceRn.
• Circle Example
Afra Zomorodian – CS 468 Lecture 1 - Page 23
INTUITION
• We loveEuclidean spaces
• Spaces that look like them? Manifolds!
• How aboutlocally Euclidean?
• Map local pieces to Euclidean spaces
• We don’t want the dimension to vary much
• Sphere
Afra Zomorodian – CS 468 Lecture 1 - Page 24

HOMEOMORPHISMS
• f : X → Y, 1-1, onto
• f is continuous (a map)
• f−1 is continuous
• f is ahomeomorphism(bijective bicontinuous)
• X is homeomorphicto Y
• X ≈ Y
• X andY have the sametopological type
Afra Zomorodian – CS 468 Lecture 1 - Page 25

CHART
p
p’
U
U’
ϕ
ϕ
X
−1
IRd
• p ∈ U ⊆ X
• ϕ : U → U ′ ⊆ Rd is a homeomorphism
• ϕ is achart
• It hasdimensiond
• ui : Rn → R standard coordinates onRd
• xi = ui ◦ ϕ : U → R arecoordinate functionsof ϕ
Afra Zomorodian – CS 468 Lecture 1 - Page 26

STRANGE SPACES
• Given two distinct pointsx, y ∈ X, x 6= y
• U , a neighborhood ofx
• V , a neighborhood ofy
• U ∩ V = ∅
• Then,X is Hausdorff.
• X is separableif it has a countable basis of neighborhoods.
• Metric spaces are always Hausdorff and separable (proof)
Afra Zomorodian – CS 468 Lecture 1 - Page 27

MANIFOLD
• X is separable, Hausdorff
• Hasd-dimensional chart at every pointx ∈ X (locally like Rd)
• X is a(topological, abstract)d-manifoldwith dimensiond
2-Manifolds
Afra Zomorodian – CS 468 Lecture 1 - Page 28

MANIFOLD WITH BOUNDARY
• X is separable, Hausdorff
• d-dimensional chart at most points
• Some points have neighborhoods homeomorphic to
Hd = {x ∈ Rd | x1 ≥ 0}, X is ad-manifold with boundary
• Theboundary∂X of X is the set of points with neighborhood
homeomorphic toHd.
• (Theorem)∂X is a(d− 1)-manifold.
Afra Zomorodian – CS 468 Lecture 1 - Page 29

COMPACTNESS
• A covering ofA ⊆ X is a family{Cj | j ∈ J} in 2X , such that
A ⊆⋃
j∈J Cj .
• An open coveringis a covering consisting of open sets.
• A subcoveringof a covering{Cj | j ∈ J} is a covering
{Ck | k ∈ K}, whereK ⊆ J .
• A ⊆ X is compactif every open covering ofA has a finite
subcovering.
. . .
Finite area, not compact
Afra Zomorodian – CS 468 Lecture 1 - Page 30

EMBEDDING
• Homeomorphisms allow us to place one manifold within another
• g : X → Y
• g is homeomorphism onto its imageg(X)
• g is anembedding
• g(X) is anembedded submanifold
• We give it the relative topology inY
• We are most familiar with embedded manifolds
Afra Zomorodian – CS 468 Lecture 1 - Page 31

NON-EMBEDDING
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
F : R → R2
F (t) = 2 cos(t− π/2), sin(2(t− π/2))
Afra Zomorodian – CS 468 Lecture 1 - Page 32

A FIX
0
π
2π
-40 -20 0 20 40
g : R → (0, 2π)g(t) = π + 2 tan−1(t)
Afra Zomorodian – CS 468 Lecture 1 - Page 33
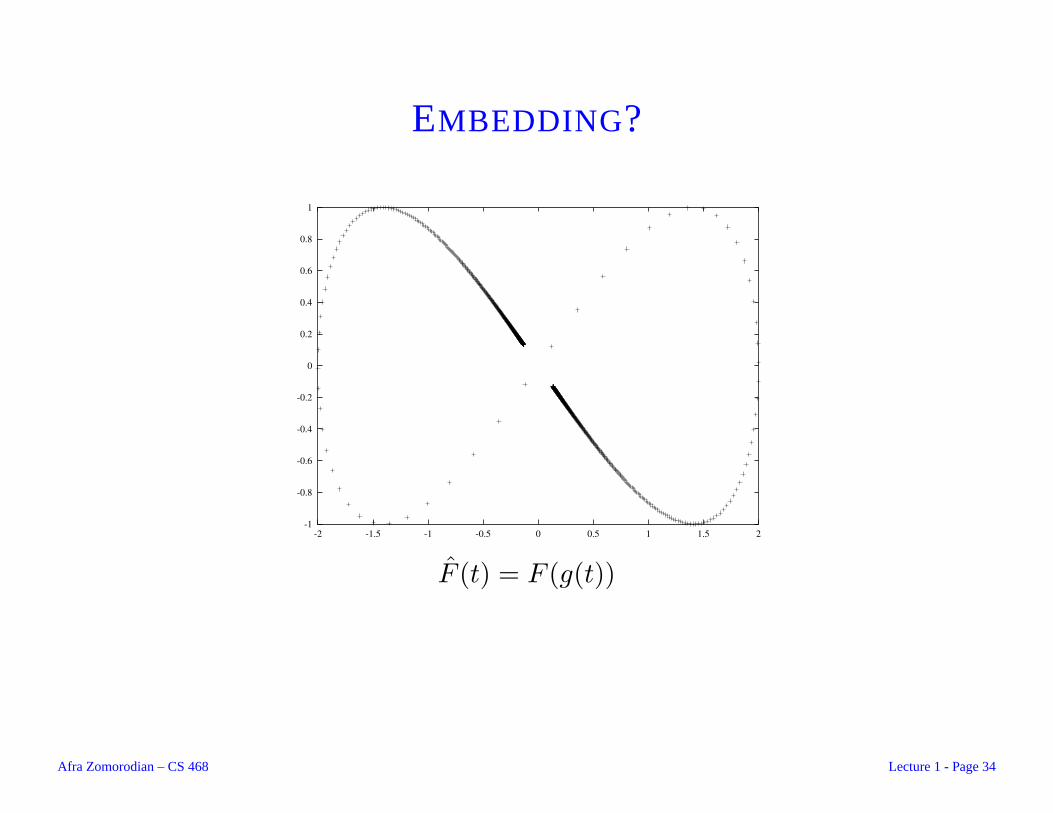
EMBEDDING?
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
F (t) = F (g(t))
Afra Zomorodian – CS 468 Lecture 1 - Page 34

IMMERSIONS
• Nasty things can happen for non-compact manifolds
• Definition requires smooth notions
• For compact manifolds, animmersionallows self-intersection
Standard immersion of the Klein bottle
Afra Zomorodian – CS 468 Lecture 1 - Page 35

WHAT TO REMEMBER
• Topology worries about connectivity
• A topology is a set of open sets that define neighborhoods
• A manifold is locally Euclidean
• Homeomorphisms map manifolds to each other
• Natural question: which spaces are homeomorphic to each other?
Afra Zomorodian – CS 468 Lecture 1 - Page 36