Introduction Clifford Algebras and the Search for Euclidean Sandwiches
135
Introduction Quaternions Exterior algebra Clifford algebra Projectivizing PCl (n, 0, 1) * Conclusion Clifford Algebras and the Search for Euclidean Sandwiches Charles Gunn Institut f ¨ ur Mathematik Geometry and Visualization Group Technisches Universit¨ at Berlin CS Department, UNC-Chapel Hill October 27, 2010
Transcript of Introduction Clifford Algebras and the Search for Euclidean Sandwiches

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford Algebrasand the Search for Euclidean Sandwiches
Charles Gunn
Institut fur MathematikGeometry and Visualization Group
Technisches Universitat Berlin
CS Department, UNC-Chapel HillOctober 27, 2010

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Motivation
The challenge of representing euclidean geometry forcomputation.Traditional approach: linear algebra.
Geometry built from points, represented as vectors.Transformations represented as matrices acting on thevectors.
Shortcomings:Operators and operands are disjoint. Translation by v isdifferent from v.Matrices are opaque: difficult to “read” the geometricsignificance.Poor representation of other geometric elements, suchas lines and planes.
Is there a better way?

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Outline
Review of quaternions.Euclidean rotations via the sandwich operator hxh.
Exterior algebra: an algebra for the subspace structureof Rn.
The algebra W :=∧
(Rn) and its dual W ∗ :=∧
((Rn)∗).The wedge product ∧ in W and W ∗.
Adding a metric to the exterior algebra to obtain aClifford algebra.
The Clifford algebra Cl(3,0,0)∗, and its closeconnection to the quaternions. New sandwiches!
Moving from Rn to RPn−1 by projectivizing.The Clifford algebra PCl(2,0,1)∗ and the euclideanplane. New sandwiches!The Clifford algebra PCl(3,0,1)∗ and euclidean space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternions
Quaternions H: a product structure on R4 yields an algebra.
Basis {e0,e1,e2,e3} for R4. Product structure:e2
0 = 1; e21 = e2
2 = e23 = −1
e0ei = eie0
eiej = −ejei (i > 0, j > 0, i 6= j)
e0 is the identity element.Write a := a0e0 + a1e1 + a2e2 + a3e3.scalar part as := a0e0
vector part av := a1e1 + a2e2 + a3e3.Imaginary quaternions IH : as = 0.conjugation a : as + av → as − av .norm: ‖a‖ :=
√aa.
Unit quaternions S3: ‖a‖ = 1 (isomorphic to 3-sphere).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternion properties
Every unit quaternion h can be written ash = cos θe0 + sin θv (1)
where ‖v‖ = 1.Exponential form. Every unit quaternion h can bewritten as an exponential:
h = exp (θv)
Sandwich operator. For h ∈ S3 as above and x ∈ IH:y := hxh
represents a rotation of the vector x around the axis vby an angle of 2θ.Inner product and cross product. For imaginaryquaternions u and v:
uv = −u · v + u× v

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternion properties
Every unit quaternion h can be written ash = cos θe0 + sin θv (1)
where ‖v‖ = 1.Exponential form. Every unit quaternion h can bewritten as an exponential:
h = exp (θv)
Sandwich operator. For h ∈ S3 as above and x ∈ IH:y := hxh
represents a rotation of the vector x around the axis vby an angle of 2θ.Inner product and cross product. For imaginaryquaternions u and v:
uv = −u · v + u× v

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternion properties
Every unit quaternion h can be written ash = cos θe0 + sin θv (1)
where ‖v‖ = 1.Exponential form. Every unit quaternion h can bewritten as an exponential:
h = exp (θv)
Sandwich operator. For h ∈ S3 as above and x ∈ IH:y := hxh
represents a rotation of the vector x around the axis vby an angle of 2θ.Inner product and cross product. For imaginaryquaternions u and v:
uv = −u · v + u× v

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternion properties
Every unit quaternion h can be written ash = cos θe0 + sin θv (1)
where ‖v‖ = 1.Exponential form. Every unit quaternion h can bewritten as an exponential:
h = exp (θv)
Sandwich operator. For h ∈ S3 as above and x ∈ IH:y := hxh
represents a rotation of the vector x around the axis vby an angle of 2θ.Inner product and cross product. For imaginaryquaternions u and v:
uv = −u · v + u× v

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Quaternion properties
Every unit quaternion h can be written ash = cos θe0 + sin θv (1)
where ‖v‖ = 1.Exponential form. Every unit quaternion h can bewritten as an exponential:
h = exp (θv)
Sandwich operator. For h ∈ S3 as above and x ∈ IH:y := hxh
represents a rotation of the vector x around the axis vby an angle of 2θ.Inner product and cross product. For imaginaryquaternions u and v:
uv = −u · v + u× v

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Planar quaternions
Question: Can the quaternions be generalized for otherkinds of geometric structures?Answer: Yes! For example, change the product structure sothat
e21 = e2
2 = 0
Exercise. Call R4 with the above product structure theplanar quaternions HP . Map the points (x , y) of theeuclidean plane into HP via i(x , y) = P := xe1 + ye2 + e3.Let u be a unit planar quaternion.
Show that uPu is an isometry of the euclidean plane,and that every isometry can be so represented.Reference: McCarthy, An Introduction to TheoreticalKinematics, MIT, 1990.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Planar quaternions
Question: Can the quaternions be generalized for otherkinds of geometric structures?Answer: Yes! For example, change the product structure sothat
e21 = e2
2 = 0
Exercise. Call R4 with the above product structure theplanar quaternions HP . Map the points (x , y) of theeuclidean plane into HP via i(x , y) = P := xe1 + ye2 + e3.Let u be a unit planar quaternion.
Show that uPu is an isometry of the euclidean plane,and that every isometry can be so represented.Reference: McCarthy, An Introduction to TheoreticalKinematics, MIT, 1990.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Planar quaternions
Question: Can the quaternions be generalized for otherkinds of geometric structures?Answer: Yes! For example, change the product structure sothat
e21 = e2
2 = 0
Exercise. Call R4 with the above product structure theplanar quaternions HP . Map the points (x , y) of theeuclidean plane into HP via i(x , y) = P := xe1 + ye2 + e3.Let u be a unit planar quaternion.
Show that uPu is an isometry of the euclidean plane,and that every isometry can be so represented.Reference: McCarthy, An Introduction to TheoreticalKinematics, MIT, 1990.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Planar quaternions
Question: Can the quaternions be generalized for otherkinds of geometric structures?Answer: Yes! For example, change the product structure sothat
e21 = e2
2 = 0
Exercise. Call R4 with the above product structure theplanar quaternions HP . Map the points (x , y) of theeuclidean plane into HP via i(x , y) = P := xe1 + ye2 + e3.Let u be a unit planar quaternion.
Show that uPu is an isometry of the euclidean plane,and that every isometry can be so represented.Reference: McCarthy, An Introduction to TheoreticalKinematics, MIT, 1990.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Planar quaternions
Question: Can the quaternions be generalized for otherkinds of geometric structures?Answer: Yes! For example, change the product structure sothat
e21 = e2
2 = 0
Exercise. Call R4 with the above product structure theplanar quaternions HP . Map the points (x , y) of theeuclidean plane into HP via i(x , y) = P := xe1 + ye2 + e3.Let u be a unit planar quaternion.
Show that uPu is an isometry of the euclidean plane,and that every isometry can be so represented.Reference: McCarthy, An Introduction to TheoreticalKinematics, MIT, 1990.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Beyond quaternions
Quaternions are nice, but ...There’s only one type of sandwich on the shelf!
To do geometry in euclidean space,we need:
Other bread:rotations around arbitrarypoints of R3,translations, andreflections
Other fillings (not just points).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The exterior algebra∧
(Rn)
The subspaces of dimension k generate a vector space∧k (Rn) of dimension(n
k
).
An element of∧k (Rn) is called a k -vector.
The union of all these vector spaces yields a gradedalgebra: ∧
(Rn) :=⋃k
∧k(Rn)
There is a skew-symmetric, bilinear operation ∧:
∧ :∧k
(Rn)⊗∧m
(Rn)→∧k+m
(Rn)
The resulting (k + m)-vector corresponds to theoriented subspace spanned by its arguments.
By linearity, ∧ extends to a binary operation on∧
(Rn).The single basis element of
∧n is the pseudo-scalar I.The resulting algebra is the exterior algebra of Rn.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The dual exterior algebra
Define W :=∧
(Rn).Define the dual exterior algebra: W ∗ :=
∧((Rn)∗).
The 1-vectors of W represent vectors of Rn,the 1-vectors of W ∗ represent hyperplanes of Rn.
W and W ∗ give equivalent representations of thesubspace structure of Rn!To distinguish them: write the wedge product
of W as ∨ (join),of W ∗ as ∧ (meet).
W ∗ is more important to us that W !Historical note. Exterior algebra due to HermanGrassmann (1844). See excellent Wikipedia article.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Clifford algebra
Introduce an inner product on the exterior algebra.The inner product (·) of 2 1-vectors is a scalar valuedetermined by its values on the basis 1-vectors.
The euclidean inner product is e2i = ei · ei = 1.
The signature (p,n, z) describes how many 1’s, −1’s,and 0’s occur in {e2
i }.Define the geometric product for two 1-vectors∈∧
(Rn): uv := u · v + u ∧ v
One can extend this product to the full exterior algebra.(See textbook by Dorst, Fontljne, and Mann).Equipped with the geometric product, the result iscalled the Clifford algebra Cl(p,n, z).Original idea due to Clifford (1880).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra Cl(3, 0, 0)∗
Begin with the dual exterior algebra∧
((R3)∗) and theeuclidean inner product
e21 = e2
2 = e23 = 1
The geometric product of various sorts of vectors yieldsgeometrically interesting information:
The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector u and a 2-vector P, uP = the planethrough P orthogonal to u plus a multiple of I.uI yields the orthogonal complement of u in R3, whetheru is a 1-vector or a 2-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
New sandwiches in Cl(3, 0, 0)∗
New bread:Reflections. For a normalized 1-vector r, rPr is thereflection of the vector P in the plane r. (Exercise.)Rotations. For normalized 1-vectors r1 and r2,
r2(r1Pr1)r2 = (r2r1)P(r1r2)
is a rotation of the vector P around the common line ofr1 and r2 through twice the angle between planesrepresented by the 1-vectors. (Exercise.)Quaternions. The even subalgebra (scalars and2-vectors) of Cl(3,0,0)∗ is isomorphic to thequaternions. (Exercise).
New filling:Placing 1-vectors (planes through the origin) in one ofthese sandwiches yields the properly transformed1-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
New sandwiches in Cl(3, 0, 0)∗
New bread:Reflections. For a normalized 1-vector r, rPr is thereflection of the vector P in the plane r. (Exercise.)Rotations. For normalized 1-vectors r1 and r2,
r2(r1Pr1)r2 = (r2r1)P(r1r2)
is a rotation of the vector P around the common line ofr1 and r2 through twice the angle between planesrepresented by the 1-vectors. (Exercise.)Quaternions. The even subalgebra (scalars and2-vectors) of Cl(3,0,0)∗ is isomorphic to thequaternions. (Exercise).
New filling:Placing 1-vectors (planes through the origin) in one ofthese sandwiches yields the properly transformed1-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
New sandwiches in Cl(3, 0, 0)∗
New bread:Reflections. For a normalized 1-vector r, rPr is thereflection of the vector P in the plane r. (Exercise.)Rotations. For normalized 1-vectors r1 and r2,
r2(r1Pr1)r2 = (r2r1)P(r1r2)
is a rotation of the vector P around the common line ofr1 and r2 through twice the angle between planesrepresented by the 1-vectors. (Exercise.)Quaternions. The even subalgebra (scalars and2-vectors) of Cl(3,0,0)∗ is isomorphic to thequaternions. (Exercise).
New filling:Placing 1-vectors (planes through the origin) in one ofthese sandwiches yields the properly transformed1-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
New sandwiches in Cl(3, 0, 0)∗
New bread:Reflections. For a normalized 1-vector r, rPr is thereflection of the vector P in the plane r. (Exercise.)Rotations. For normalized 1-vectors r1 and r2,
r2(r1Pr1)r2 = (r2r1)P(r1r2)
is a rotation of the vector P around the common line ofr1 and r2 through twice the angle between planesrepresented by the 1-vectors. (Exercise.)Quaternions. The even subalgebra (scalars and2-vectors) of Cl(3,0,0)∗ is isomorphic to thequaternions. (Exercise).
New filling:Placing 1-vectors (planes through the origin) in one ofthese sandwiches yields the properly transformed1-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
New sandwiches in Cl(3, 0, 0)∗
New bread:Reflections. For a normalized 1-vector r, rPr is thereflection of the vector P in the plane r. (Exercise.)Rotations. For normalized 1-vectors r1 and r2,
r2(r1Pr1)r2 = (r2r1)P(r1r2)
is a rotation of the vector P around the common line ofr1 and r2 through twice the angle between planesrepresented by the 1-vectors. (Exercise.)Quaternions. The even subalgebra (scalars and2-vectors) of Cl(3,0,0)∗ is isomorphic to thequaternions. (Exercise).
New filling:Placing 1-vectors (planes through the origin) in one ofthese sandwiches yields the properly transformed1-vector.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
TODO list
We still can’t do rotations around arbitrary points, oreuclidean translations. To get these sandwiches, we needto:
“Projectivize”, that is, introduce homogeneouscoordinates, andIntroduce a degenerate signature of the form (n,0,1).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
TODO list
We still can’t do rotations around arbitrary points, oreuclidean translations. To get these sandwiches, we needto:
“Projectivize”, that is, introduce homogeneouscoordinates, andIntroduce a degenerate signature of the form (n,0,1).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
TODO list
We still can’t do rotations around arbitrary points, oreuclidean translations. To get these sandwiches, we needto:
“Projectivize”, that is, introduce homogeneouscoordinates, andIntroduce a degenerate signature of the form (n,0,1).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Projectivizing
This involves moving our “theater” from Rn to real projectivespace RPn−1.
The points of RPn−1 are lines through the origin in Rn:
x ∼ y ⇐⇒ x = λy for some λ 6= 0
Everything done up to now with Rn goes throughinstead for RPn−1:
The projectivized exterior algebra is written P(∧
(Rn)).It represents the full subspace structure of RPn−1.A simple k -vector in P(
∧(Rn)) represents a
(k − 1)-dimensional subspace of RPn−1.PCl(3,0,0)∗ (projectivized Cl(3,0,0)∗) represents thegeometry of the elliptic plane. Terminology!.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
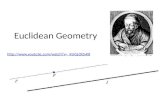
Fundamental Triangle for P(∧
(R3)∗)
e2
e3E1= e2 e3
E3= e1 e2
E2= e3 e1
e1
The basis 1- and 2-vectors for P(∧
(R3)).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
The Clifford algebra PCl(2, 0, 1)∗
Homogeneous coordinates for euclidean plane.Map the point (x , y) to the 2-vector xE1 + yE2 + E3.Signature. Change the signature to have one zero:e2
1 = e22 = 1, e2
3 = 0.Points. Then E2
1 = E22 = 0, E2
3 = −1. (Exercise.)“Elements at infinity square to 0.”
Geometric product.The inner product gives a norm on 1-vectors.For two normalized 1-vectors, u · v is the cosine of theangle between the planes.For a 1-vector (line) u and a 2-vector (point) P, uP =the line through P orthogonal to u plus a multiple of I.
Historical reference. Theory of adding a metric toprojective space due to Cayley and Klein (1859-70).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Geometric Products for PCl(2, 0, 1)∗
A sampling of geometric products for PCl(2,0,1)∗:P×Q = PQ−QP is commutator product.Q · a is the grade-1 part of Qa.(Q · a)a is orthogonal projection of Q on a.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for the euclidean plane
PCl(2,0,1)∗ gives us new sandwiches:Euclidean reflections. The euclidean reflection in thenormalized line u is given by the sandwich uPu.(Exercise.)Euclidean rotations. The euclidean rotation aroundthe point P = xE1 + yE2 + E3 by angle 2θ is given bythe sandwich gXg where g = cos (θ) + sin (θ)P.
g is the Clifford algebra equivalent of conjugation, calledreversal.g is called a spinor.Exponential form. g = esin (θ)P.
Euclidean translations. For a point of the formP = xE1 + yE2 (a “point at infinity”) define g = 1 + P.Then gXg is the euclidean translation by (2x ,2y).(Exercise.)
Exponential form. One can show g = eP (sinceP2 = 0).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Sandwiches for euclidean space
PCl(3,0,1)∗ is the analogous Clifford algebra for euclideanspace.
Reflections Sandwiching by a 1-vector is a reflection inthe plane of the 1-vector, similarly for 3-vectors.Spinors exist: elements g of the even subalgebra suchthat gg = 1.Write a spinor g = s + b + t I (b a bivector).Most of the interesting phenomena in 3D due to theexistence of non-simple bivectors.
A spinor with a non-simple bivector part produces ascrew motion.A screw motion has a unique fixed line, its axis.
Spinors have logarithms which are easy to compute.The significance of the signatures (n,0,1) is due toEduard Study (around 1900).

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Review
We began by reviewing the properties of quaternionsand their ability to represent rotations around the originusing sandwich operators.We asked, are there other systems analogous toquaternions which offer a wider range of euclideansandwiches, both bread and fillings?Yes: Cl(3,0,0)∗ contains the quaternions as asubalgebra and offer reflections as bread, and planesas filling.We replaced Rn with RPn−1 in the Clifford algebrasetting.We showed that PCl(2,0,1)∗ provides all sandwichesfor the euclidean plane.We sketched how PCl(3,0,1)∗ fulfills the same functionfor euclidean 3-space.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Conclusions
The dual projective Clifford algebra with signature (n,0,1) isa compact, efficient tool for doing euclidean geometry.
All linear subspaces are represented, not just points.There is no distinction between operands andoperators.
For further study, with exercises, consult the preprint:http://www.math.tu-berlin.de/ gunn/Documents/Papers/introEucCA.pdf
http://www.math.tu-berlin.de/ gunn/Documents/Papers/rigidBodyMotionCA.pdf
Feedback welcome!
Thank you for your attention.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Conclusions
The dual projective Clifford algebra with signature (n,0,1) isa compact, efficient tool for doing euclidean geometry.
All linear subspaces are represented, not just points.There is no distinction between operands andoperators.
For further study, with exercises, consult the preprint:http://www.math.tu-berlin.de/ gunn/Documents/Papers/introEucCA.pdf
http://www.math.tu-berlin.de/ gunn/Documents/Papers/rigidBodyMotionCA.pdf
Feedback welcome!
Thank you for your attention.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Conclusions
The dual projective Clifford algebra with signature (n,0,1) isa compact, efficient tool for doing euclidean geometry.
All linear subspaces are represented, not just points.There is no distinction between operands andoperators.
For further study, with exercises, consult the preprint:http://www.math.tu-berlin.de/ gunn/Documents/Papers/introEucCA.pdf
http://www.math.tu-berlin.de/ gunn/Documents/Papers/rigidBodyMotionCA.pdf
Feedback welcome!
Thank you for your attention.

Introduction
Quaternions
Exterioralgebra
Cliffordalgebra
Projectivizing
PCl(n, 0, 1)∗
Conclusion
Conclusions
The dual projective Clifford algebra with signature (n,0,1) isa compact, efficient tool for doing euclidean geometry.
All linear subspaces are represented, not just points.There is no distinction between operands andoperators.
For further study, with exercises, consult the preprint:http://www.math.tu-berlin.de/ gunn/Documents/Papers/introEucCA.pdf
http://www.math.tu-berlin.de/ gunn/Documents/Papers/rigidBodyMotionCA.pdf
Feedback welcome!
Thank you for your attention.


















