Introduction
44
1 Dynamics II Dr. Jorge A. Olórtegui Yume, Ph.D. INTRODUCTION TO MECHANICAL VIBRATIONS Lecture No. 1 Mechanical Engineering School National University of Trujillo
-
Upload
eric-cesias -
Category
Documents
-
view
3 -
download
0
Transcript of Introduction

1
Dynamics II Dr. Jorge A. Olórtegui Yume, Ph.D.
INTRODUCTION TO MECHANICAL VIBRATIONS
Lecture No. 1
Mechanical Engineering School
National University of Trujillo

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.2
The Millenium Bridge
PLACE :London, England
OPEN TO PUBLIC:June 10th, 2000
CLOSED:3 days after!!!
CAUSE:Vibrations felt by pedestrians”The Wobbly Bridge”
COST:28.4 Million Dollars
RE-OPEN TO PUBLIC:Feb. 22nd, 2002
ANALYSIS, REINFORCING, TESTING COST:7.8 MILLION Dollars
ANALYSIS:Based upon Tacoma Narrows Bridge case

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.3
THE TACOMA NARROWS BRIDGE
PLACE:Tacoma - Gig Harbor, Washington, USA
OPEN TOPUBLIC:July 1st, 1940
COLLAPSE:Nov 7th, 1940
CAUSE:RESONANCEWind-induced oscillation frequency coincided with one of the bridge´s natural frequencies

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.4
TODAY´S TACOMA NARROWS BRIDGE
BEFORE AFTER AFTER
BEFORE

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.5
BEFORE WE CAN SOLVE SUCH COMPLEX PROBLEMS ….
NEED MECHANICAL VIBRATIONS FUNDAMENTALS
CRAWL, WALK, RUN AND THEN…FLY

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.6
WHAT DO WE DO IN THE MECH.
VIBRATIONS COURSE?
Physical
System

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.7
WHAT DO WE DO IN THE MECH.
VIBRATIONS COURSE?
Physical
System
Engineering
Model
x
2k 1k
2l 1l

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.8
WHAT DO WE DO IN THE MECH.
VIBRATIONS COURSE?
Physical
System
Engineering
Model
Mathematical
Model
0
0
0
02
22
2
112211
221121
2
x
lklklklk
lklkkkx
mr
m

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.9
WHAT DO WE DO IN THE MECH.
VIBRATIONS COURSE?
Physical
System
Engineering
Model
Mathematical
Model
Mathematical
Solution
22
2
211
1
1 sin1
sin1
tAtA
t
tx

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.10
VIBRATION: Any motion that repeats itself after an interval of time
Examples:• Motion of a plucked guitar string• Ground motion in an earthquake• Beating of your heart• Oscillation of mass attached to spring & damper• Pendulum
MECH. VIBRATIONS FUNDAMENTALS
Vibration

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.11
MECH. VIBRATIONS FUNDAMENTALS
•Mean of Epotential storage• Spring (k) or elasticity in general
•Mean of Ekinetic storage• Mass (m) or inertia in general
•Mean of gradual Energy disipation •Damper (c), friction (m)
ViIBRATION
VIBRATORY SYSTEM PARTS
2
2
1kxEpotential
2
2
1mvEkinetic
2cvdt
dEP
dissipated
dissipated

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.12
DEGREE OF FREEDOMMín. # of independent coordinates needed to define position of all parts of a system at any instant.
ONE DEGREE OF FREEDOM SYSTEM (1-DOF)
Mass-Spring System
MECH. VIBRATIONS FUNDAMENTALS
TWO DEGREE OF FREEDOM SYSTEM (2-DOF)
Torsional system
THREE DEGREE OF FREEDOM SYSTEM (3-DOF)

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.13
“N” DEGREE OF FREEDOM SYSTEM (N-DOF)
MECH. VIBRATIONS FUNDAMENTALS
A cantilever beam showing an infinite number of DOF
N CONTINUOUS
SYSTEM
N = Finite #
DISCRETE OR LUMPED SYSTEM
Model as

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.14
MECH. VIBRATIONS FUNDAMENTALSVIBRATION CLASIFICATIONSeveral criteria
Free Vibration: System disturbed initially thenleft to oscillate on its ownForced Vibration: System subject to an externalforce usually oscillating
Undamped Vibration: If no energy is dissipated by friction or othe resistanceDamped Vibration: If energy is gradually lost

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.15
MECH. VIBRATIONS FUNDAMENTALSVIBRATION CLASIFICATION
Linear Vibration: Basic components of system behave linearly
Non-linear Vibration: Real components are non linear
Equation Of Motion (EOM) Equation Of Motion (EOM)
0
kxxcxmIF m, c, k are constantsTHENDiff. Equation is LINEAR
0
xxkxcxm
Diff. Equation is NON-LINEAR
Great!. Soln. To EOM is usually known and relatively easy to use
Ooops!. Soln. To EOM is usually not known and/or difficult to obtain and difficult to use Num. Methods

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.16
MECH. VIBRATIONS FUNDAMENTALSSOME CONCEPTS IN VIBRATIONS MODELLING

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.17
MECH. VIBRATIONS FUNDAMENTALSSOME CONCEPTS IN VIBRATIONS MODELLING
Equation Of Motion (EOM)
0
kxxcxm
xmF
Newton´s 2nd Law (Dynamics)
teXtx d
tn sin11

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.18
MECH. VIBRATIONS FUNDAMENTALSSOME CONCEPTS IN VIBRATIONS MODELLING
Which part of the modelling
procedure is this?

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.19
MECH. VIBRATIONS FUNDAMENTALSExample: The figure shows a motorcycle and its rider. Develop a
sequence of three mathematical models of the system to investigate vibration in the vertical direction. Consider the elasticity of the tires, struts, and rider; damping of the struts (vertically) and the rider; masses of the wheels, body vehicle and rider.

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.20
MECH. VIBRATIONS FUNDAMENTALSSolution:
Physical System: Rider-Motorcycle Model Rider-Motorcycle using basic components
Model 1• 1-DOF
• keq = stiffness of tires, struts, and rider
• ceq = includes damping of struts, and rider
• meq = mass of wheels, vehicle body, and rider
• Elasticity k (stiffness) of tires, struts, and rider
• Energy dissipation c( damping) of struts and rider• Inertia m (mass) of wheels, vehicle body, and rider

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.21
MECH. VIBRATIONS FUNDAMENTALSSolution:
Physical System: Rider-Motorcycle Model Rider-Motorcycle using basic components
Model 2• 2-DOF • Stiffness of tires & struts separately. Rider stiffness 0• Struts damping separately and rider damping 0• Mass of vehicle body and rider together
• Elasticity k (stiffness) of tires, struts, and rider
• Energy dissipation c( damping) of struts and rider• Inertia m (mass) of wheels, vehicle body, and rider

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.22
MECH. VIBRATIONS FUNDAMENTALSSolution:Physical System: Rider-Motorcycle Model Rider-Motorcycle using
basic components
Model 3• 3-DOF • Stiffness of tires, struts and rider considered• Struts and rider damping considered• Masses of tires, vehicle body and rider considered

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.23
MECH. VIBRATIONS FUNDAMENTALSSolution:Physical System: Rider-Motorcycle Model Rider-Motorcycle using
basic components
Model 4• 2-DOF • Struts Stiffness together. Rider stiffness 0• Struts damping together and rider damping 0• Masses of vehicle body and rider together• Masses of wheels together
Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.24
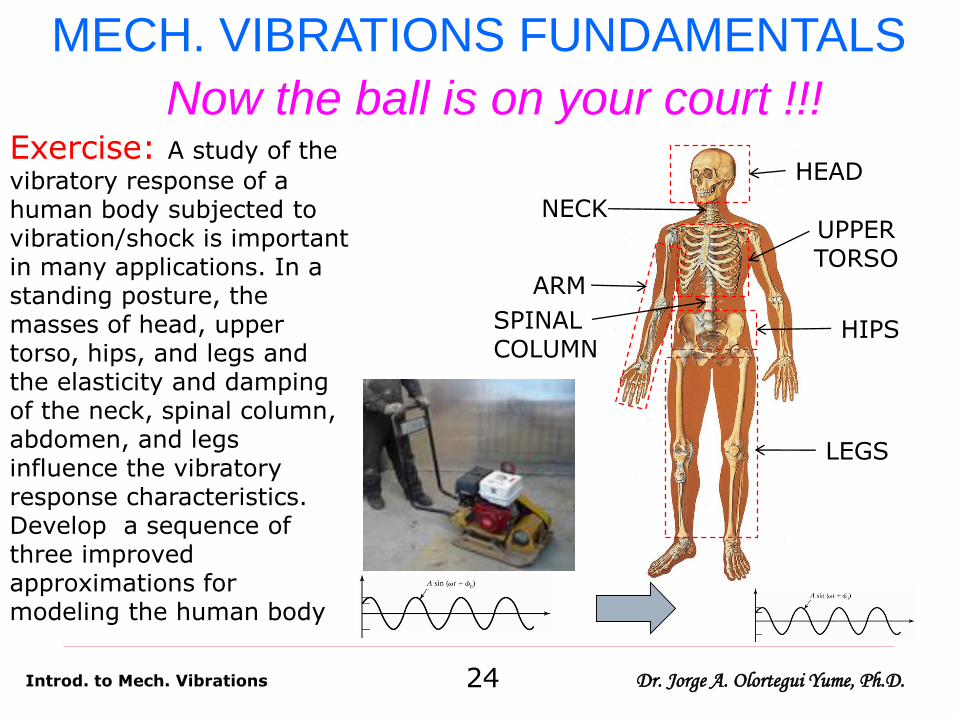
MECH. VIBRATIONS FUNDAMENTALS
Exercise: A study of the
vibratory response of a human body subjected tovibration/shock is importantin many applications. In a standing posture, themasses of head, uppertorso, hips, and legs and the elasticity and dampingof the neck, spinal column, abdomen, and legsinfluence the vibratoryresponse characteristics. Develop a sequence of three improvedapproximations formodeling the human body
Now the ball is on your court !!!
HEAD
UPPER TORSO
HIPS
ARM
LEGS
NECK
SPINAL COLUMN
Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.25
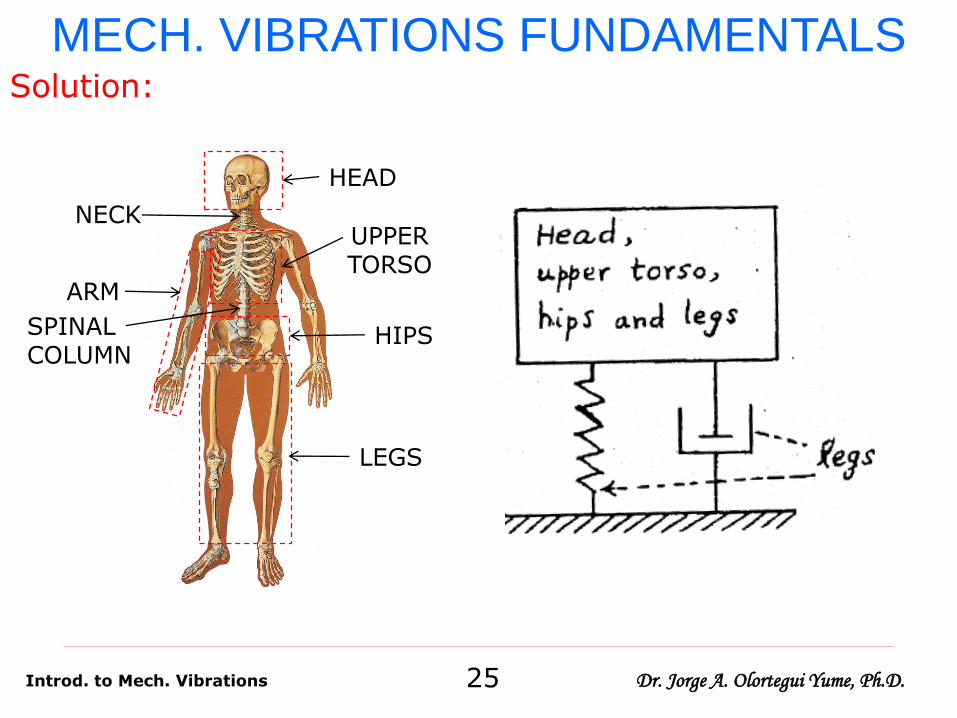
MECH. VIBRATIONS FUNDAMENTALSSolution:
HEAD
UPPER TORSO
HIPS
ARM
LEGS
NECK
SPINAL COLUMN

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.26
MECH. VIBRATIONS FUNDAMENTALSSolution:
HEAD
UPPER TORSO
HIPS
ARM
LEGS
NECK
SPINAL COLUMN

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.27
MECH. VIBRATIONS FUNDAMENTALSSolution:
HEAD
UPPER TORSO
HIPS
ARM
LEGS
NECK
SPINAL COLUMN
SHOULDER

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.28
MECH. VIBRATIONS FUNDAMENTALSSolution:
HEAD
UPPER TORSO
HIPS
ARM
LEGS
NECK
SPINAL COLUMN
SHOULDER

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.29
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Spring Elements
• Linear • Mass and Damping negligible• Restoring Force opossed todeformation
Assume : x1 > x2
Fext FextFint Fint
Fext = Fint
Deforming Internal

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.30
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMSpring Elements
Free Body Diagrams (FBD´s)
Strectching(“Coming out”)
Shrinking(“Coming in”)
Lo
Lo x
Fs
Lf
Fs
xLf
Fs Fs
Spring FBD
Shrinking
Fs
W
N
(“Coming in”)
Stretching
Fs
W
N
(“Coming out”)
FBD of Body attached to spring
Fs : Spring Force (in N)Epot : Potential Energy (in J)x : Spring elongation (in m)k : Spring Constant or Stiffness (in N/m)
Spring Force Potential Energy stored in spring
kxFs 2
2
1kxEpot

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.31
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMSpring Combinations
In Parallel
• Equivalent spring can replace original system
• All elongations are equal
• Forces in each spring are different
• Equilibrium
keq=
21 st
111 kF stkF 22 stkF 11 222 kF
221121 kkFFW
stststeq kkFFk 2121 21 kkkeq

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.32
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMSpring Combinations
In Series
• Equivalent spring can replace original system
• Total elongation is summation of elongations
• Forces in each spring are equal because of equilibrium
=
21 st
21 FFW
111 kF 12kW
22kW 222 kF
1
1
k
W
2
2
k
W
21 st
21 k
W
k
W
k
W
eq 21
111
kkkeq
keq

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.33
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMSpring Combinations in general
neq kkkk ...21
eqn ...21
eqeqnn
seqsnss
kkkk
FFFF
...
...
2211
21In Parallel
nkkeq Special case
kkkk n ...21
neq kkkk
1...
111
21
kkkk n ...21n
kkeq
2n21
21
kk
kkkeq
eqn ...21
eq
seq
n
snss
k
F
k
F
k
F
k
F ...
2
2
1
1In Series
Special case
Special case

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.34
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution:
Example: Find the equivalent stiffness k of the following system diameter d = 2 cm
Springs in parallel and series:
k1k2
k3
k4
m
k5
k3
k4
m
k1+k2+k5

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.35
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution:
m
43
43521
kk
kkkkkkeq
m
k1+k2+k5
1
1
k31
k4
k3k4k3 k4
k3
k4
m
k1+k2+k5

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.36
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Exercise: Determine the equivalent spring constant of the system shown
Your turn !!!

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.37
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution:
keq=

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.38
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMMasa suspendida al final de una viga en voladizo (Flexión):
De Resistencia de Materiales
Deflección Estatica al final de una viga en voladizo debido a masa “m” en el extremo.Asumir que masa de barra << “m”
EI
lmg
EI
Wlst
33
33
kF
Fk
Ley de Hooke Analogía
3
3
l
EIWk
st
Sistema Real o Situación Física
(a) Modelo de 1GDL (asume que no hay amortiguamiento c=0)

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.39
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMMasa suspendida al final de una barra (Torsión):
(a) Sistema Real o Situación Física
(b) Modelo de 1GDL (asume que no hay amortiguamiento )
De Resistencia de Materiales
Desplazamiento angular quasi-estatico al final de una barra redonda debido a torque “M” en el extremo.
44
32
32
dG
ML
dG
ML
GI
ML
p
st
tkM
Mkt
Ley de Hooke Analogía
L
dG
dG
ML
MMk
st
t3232
4
4
t
(a) (b)
M
LG
L
dGkt
32
4
d

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.40
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEMConstantes de Rigidez para otros Tipos Elementos Simples (Ejemplo)

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.41
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution:
Example: The figure shows the suspension system of a freight truck with a parallel spring arrangement . Find the equivalent spring constant of the suspension if each of the three helical springs is made of steel (G=80x109 N/m2) and has five effective turns, mean coil diameter D =20 cm, and wire diameter d = 2 cm
The stiffness of each helical spring is:
mNnD
Gdk /000,40
520.08
02.01080
83
49
3
4
Parallel spring arrangement:
mNmNkkeq /000,120/000,4033
Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.42
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution:
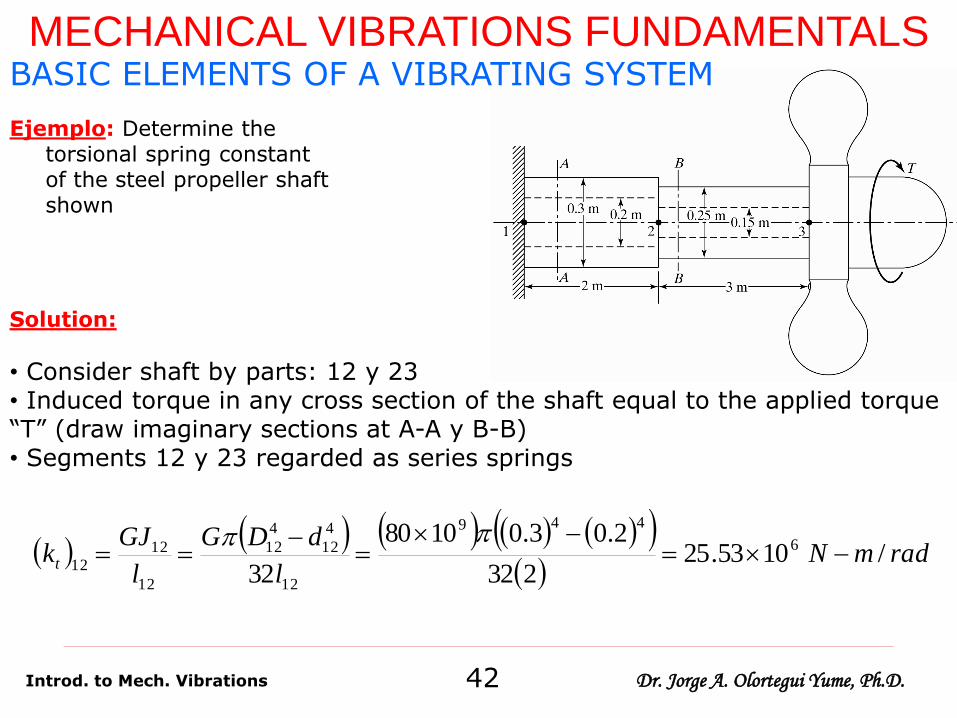
Ejemplo: Determine the torsional spring constant of the steel propeller shaft shown
• Consider shaft by parts: 12 y 23• Induced torque in any cross section of the shaft equal to the applied torque “T” (draw imaginary sections at A-A y B-B)• Segments 12 y 23 regarded as series springs
radmN
l
dDG
l
GJkt /1053.25
232
2.03.01080
32
6
449
12
4
12
4
12
12
12
12

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.43
MECHANICAL VIBRATIONS FUNDAMENTALSBASIC ELEMENTS OF A VIBRATING SYSTEM
Solution: (cont´d)
radmN
l
dDG
l
GJkt /109.8
332
15.025.01080
32
6
449
23
4
23
4
23
23
23
23
Series spring
radmNkk
kkk
tt
tt
eqt /106.6 6
2312
2312
2312
111
tteqt kkk

Introd. to Mech. Vibrations Dr. Jorge A. Olortegui Yume, Ph.D.44
BIBLIOGRAPHY
BÁSICA:•Thomson, W.T., Dahleh, M.D., 1997, “Teoria de Vibraciones con Aplicaciones”, Prentice HallIberoamericana, 5ta Edición, México.•Inman, D., 2007, “Engineering Vibration”, Prentice Hall, 3rd Edition, USA.•Moore, H., 2008, “Matlab for Engineers”, Prentice Hall, 2nd Edition, USA.
COMPLEMENTARIA:•Balachandran, B., Magrab, E., 2006, “Vibraciones”, Thomson, 5ta Edición, México•Rao, S.S., 2004, “Mechanical Vibrations”, Ed. Prentice Hall, 4th Edition, USA.
ESPECIALIZADA:•Hartog, D., 1974, “Mecánica de las Vibraciones”, Cecsa, Mexico.•Harris, C., Piersol, A., 2001, “Harri´s Shock and Vibration Handbook”, McGraw Hill Professional,
5th Edition. USA.