Intentional Mobility in Wireless Sensor Networks Deployment, Dispatch, and Applications
20
- 1 - - 1 - Intentional Mobility in Wireless Sensor Networks Deployment, Dispatch, and Applications Dr. You-Chiun Wang ( 王王王 ) Department of Computer Science, National Chiao-Tung University 2010/10/22
-
Upload
blaine-maxwell -
Category
Documents
-
view
36 -
download
0
description
Intentional Mobility in Wireless Sensor Networks Deployment, Dispatch, and Applications. Dr. You-Chiun Wang ( 王友群 ) Department of Computer Science, National Chiao-Tung University 2010/10/22. - 1 -. Wireless Sensor Networks. SENSROS ARE STATIC!. “ Mobile” Sensor Networks. - PowerPoint PPT Presentation
Transcript of Intentional Mobility in Wireless Sensor Networks Deployment, Dispatch, and Applications

- 1 -- 1 -
Intentional Mobility in Wireless Sensor Networks
Deployment, Dispatch, and Applications
Dr. You-Chiun Wang (王友群 )
Department of Computer Science,National Chiao-Tung University
2010/10/22
- 2 -
Wireless Sensor Networks
WSN
SENSROS ARE STATIC!
- 3 -
“Mobile” Sensor Networks
Some sensor nodes can move around (e.g., robots).
Purpose: automatic deployment, network repairing, and sensor dispatch

- 4 -
Topics
Automatic Deployment Mobile Sensor Dispatch Systems & Applications
iMouse System VSN (Vehicular Sensor Network) System

- 5 -- 5 -
Automatic Deployment
WSN
SENSROS ARE MOBILE!

- 6 -- 6 -
In a “Perfect” World
WSN
- 7 -- 7 -
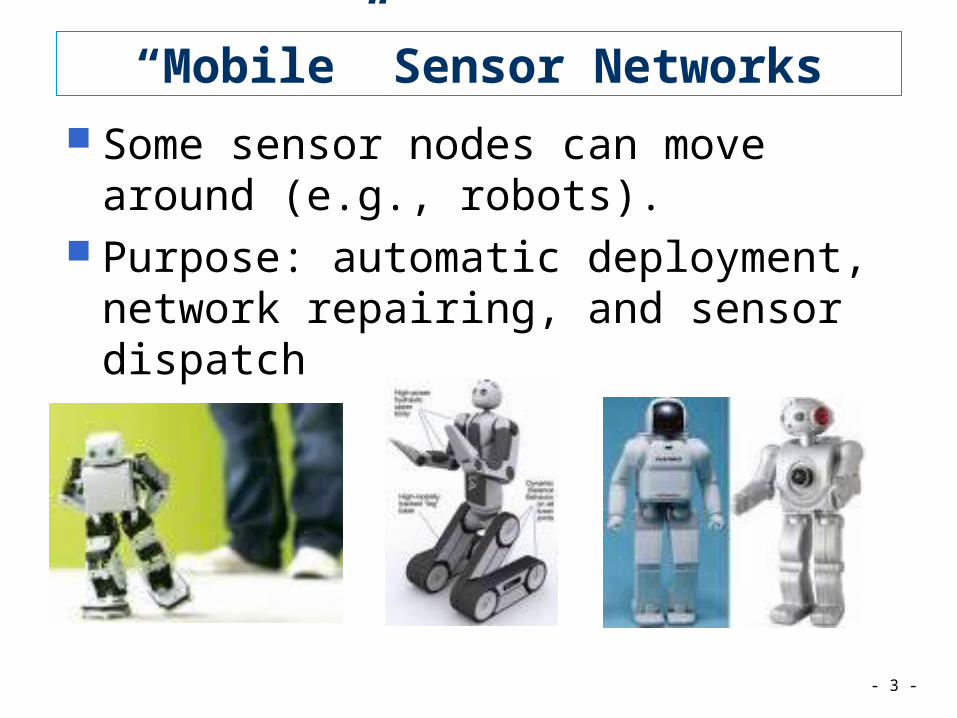
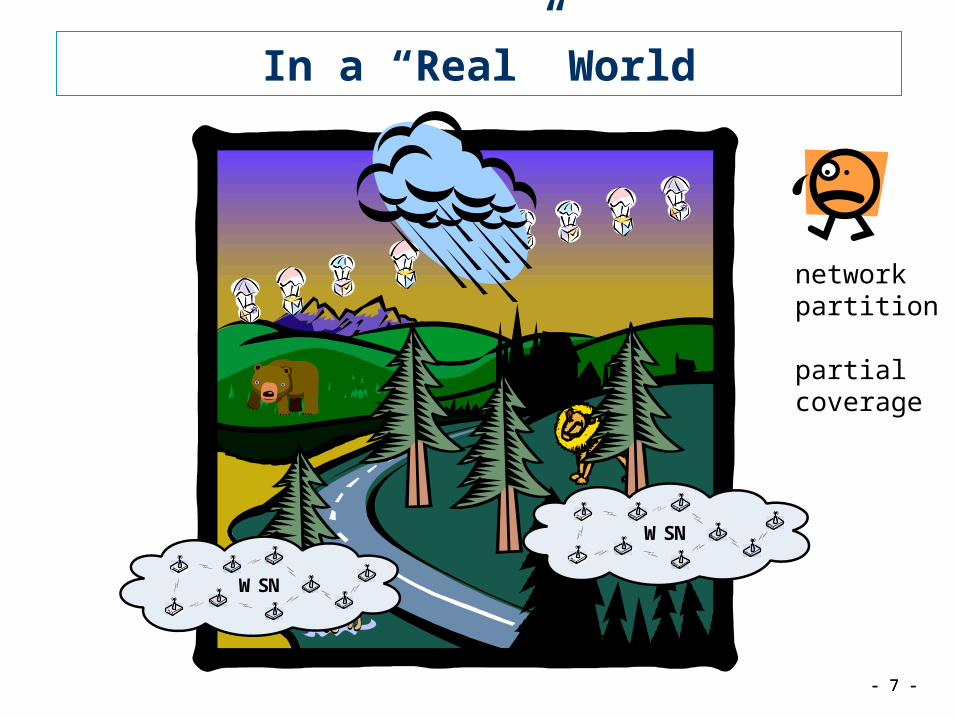
In a “Real” World
WSN
WSN
network partition
partial coverage
- 8 -- 8 -
Can Sensors Reorganize a WSN “by Themselves”?
network partition
partial coverage
WSN
- 9 -
Question Given a sensing field AA possibly with obstacles,
how can we make mobile sensors automatically deploy a network in an efficient way? Use the smallest number of sensors. Sensors can consume the minimum energy to reorganize
the network.
- 9 -
- 10 -
Overview of Solutions
We first calculate the locations to place sensors and then dispatch mobile sensors to these locations. Placement solution should use fewer sensors. Dispatch solution should move sensors so that they can
remain the maximum energy after movement.
placement
Energy
dispatch

- 11 -- 11 -
Placement Algorithm Partition a sensing field AA into sub-regions and then
place sensors in each region: Single-row regions
A belt-like area between obstacles whose width is NOT larger than , where rmin= min(rs, rc).
We can deploy a sequence of sensors to satisfy both coverage and connectivity.
Multi-row regionsWe need multiple rows of sensors to cover such areas.Note: obstacles may exist in such regions.
min3r
- 12 -- 12 -
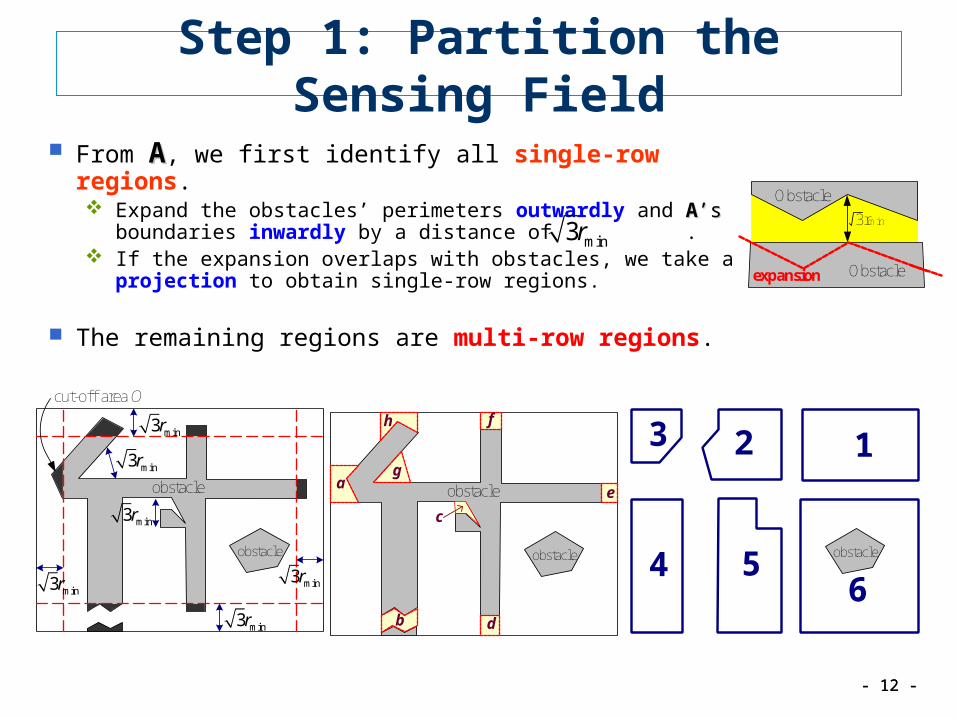
Step 1: Partition the Sensing Field
From AA, we first identify all single-row regions. Expand the obstacles’ perimeters outwardly and AA’s’s
boundaries inwardly by a distance of . If the expansion overlaps with obstacles, we take a
projection to obtain single-row regions.
The remaining regions are multi-row regions.
min3r3rmin
Obstacle
Obstacleexpansion
obstacle
obstacle
min3r
min3r
min3r
min3r
min3r
min3r
cut-off area O
obstacle
123
4 56
obstacle
obstacle
h
a
c
g
d
e
f
b

- 13 -- 13 -
Step 2: Place Sensors in a Single-Row Region
Place sensors along the bisector of region.
obstacle
obstacle
obstacle
obstacle
single-row regions bisectors sensor placements (rc = rs case)
minwidth 3r
triangulationmidpoint
bisector
minwidth 3r
- 14 -- 14 -
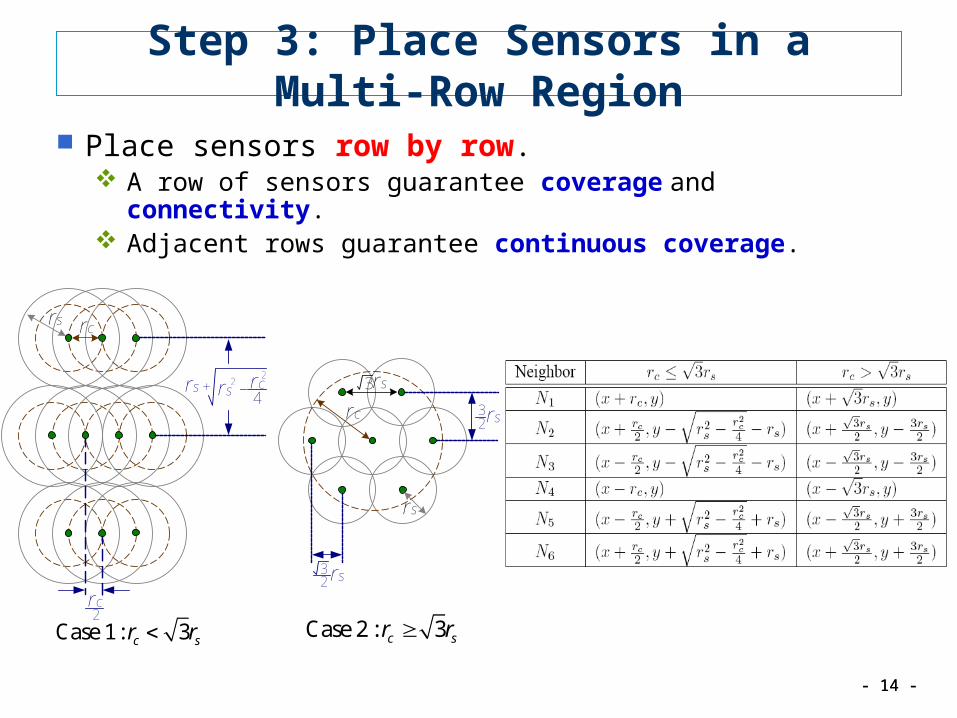
Step 3: Place Sensors in a Multi-Row Region
Place sensors row by row. A row of sensors guarantee coverage and connectivity. Adjacent rows guarantee continuous coverage.
rc
rc2
rs23
rs23
rs
rs3
rc
rs
rs + rcrs -22
4
Case 1: 3c sr r Case 2 : 3c sr r

- 15 -
Step 4: Handle the Boundary Case
Three unsolved problems Some areas near the boundaries
are NOT covered. Connectivity between adjacent
rows needs to be maintained. Connectivity to neighboring
regions should be maintained.uncovered areas22
4cr
sr connectivity
obstacle
obstacle
Solutions Sequentially place sensors along
the boundaries. Not all boundaries should be
placed with sensors.

- 16 -- 16 -
Dispatch Algorithm (1/5)
Find a maximum-weight maximum matching in a weighted complete bipartite graph. Sensors vs. locations
We should take care of the obstacles inside the sensing field.
AA
II

- 17 -
Dispatch Algorithm (2/5)
II
BD
C
E
Run sensor placement algorithm on II to get the target locations.
L={(x1, y1), (x2, y2), (x3, y3), (x4, y4)}1 2
3 4 Compute energy cost
1 1 2 2
3 3 4 4
1 1 2 2
3 3 4 4
1 1 2 2
3 3 4 4
1
( , ( , )) 9 ( , ( , )) 12
( ,( , )) 8 ( , ( , )) 11
( ,( , )) 11 ( , ( , )) 11
( ,( , )) 9 ( , ( , )) 9
( ,( , )) 10 ( , ( , )) 6
( ,( , )) 11 ( , ( , )) 8
( ,( ,
c A x y c A x y
c A x y c A x y
c B x y c B x y
c B x y c B x y
c C x y c C x y
c C x y c C x y
c D x
1 2 2
3 3 4 4
1 1 2 2
3 3 4 4
)) 14 ( , ( , )) 13
( ,( , )) 12 ( , ( , )) 10
( ,( , )) 33 ( , ( , )) 35
( ,( , )) 30 ( , ( , )) 31
y c D x y
c D x y c D x y
c E x y c E x y
c E x y c E x y
A

- 18 -- 18 -
Dispatch Algorithm (3/5)
Construct the weighted complete bipartite graph.
A
B
C
D
E
1
2
3
4
Sensors Locations
• Weights of edges: w(si,lj) = 40 – c(si,lj) - objective function: remaining energy - all sensors have initial energy of 40
A B C D E
1 31 29 30 26 7
2 28 29 36 27 5
3 32 31 29 38 10
4 29 31 32 30 9
A 1: needs 9 energyweight (A,1) = 40 – 9 = 31

- 19 -- 19 -
Dispatch Algorithm (4/5)
Find the maximum-weight maximum matching.Hungarian Method: finds the optimal solution in O(n3).
A
B
C
D
E
1
2
3
4
Sensors Locations
A B C D E
1 31 29 30 26 7
2 28 29 36 27 5
3 32 31 29 38 10
4 29 31 32 30 9

- 20 -- 20 -
Dispatch Algorithm (5/5) Sensors are dispatched to the matched
locations.
A
B
C
D
E
1
2
3
4
II
A
BD
C
E
1 2
3 4
Does not moveSensors Locations