INSTITUTO SUPERIOR TÉCNICO PÚBLICO · Portátil: Son cintas de pequeñas dimensiones y...
56
INSTITUTO SUPERIOR TÉCNICO PÚBLICO “NUEVA ESPERANZA” PROYECTO DE INVESTIGACIÓN TECNOLÓGICA. “Diseño e Implementación de un Prototipo de una Faja para la Medición de Área de Superficies Regulares e Irregulares, para la industria del cuero” CARRERA PROFESIONAL DE: Electrónica Industrial AUTOR: Ing. Saúl Linares Vértiz TRUJILLO – PERÚ 2015
Transcript of INSTITUTO SUPERIOR TÉCNICO PÚBLICO · Portátil: Son cintas de pequeñas dimensiones y...

INSTITUTO SUPERIOR TÉCNICO PÚBLICO
“NUEVA ESPERANZA”
PROYECTO DE INVESTIGACIÓN TECNOLÓGICA.
“Diseño e Implementación de un Prototipo de una Faja
para la Medición de Área de Superficies Regulares e
Irregulares, para la industria del cuero”
CARRERA PROFESIONAL DE:
Electrónica Industrial
AUTOR:
Ing. Saúl Linares Vértiz
TRUJILLO – PERÚ
2015
MARCO
TEÓRICO
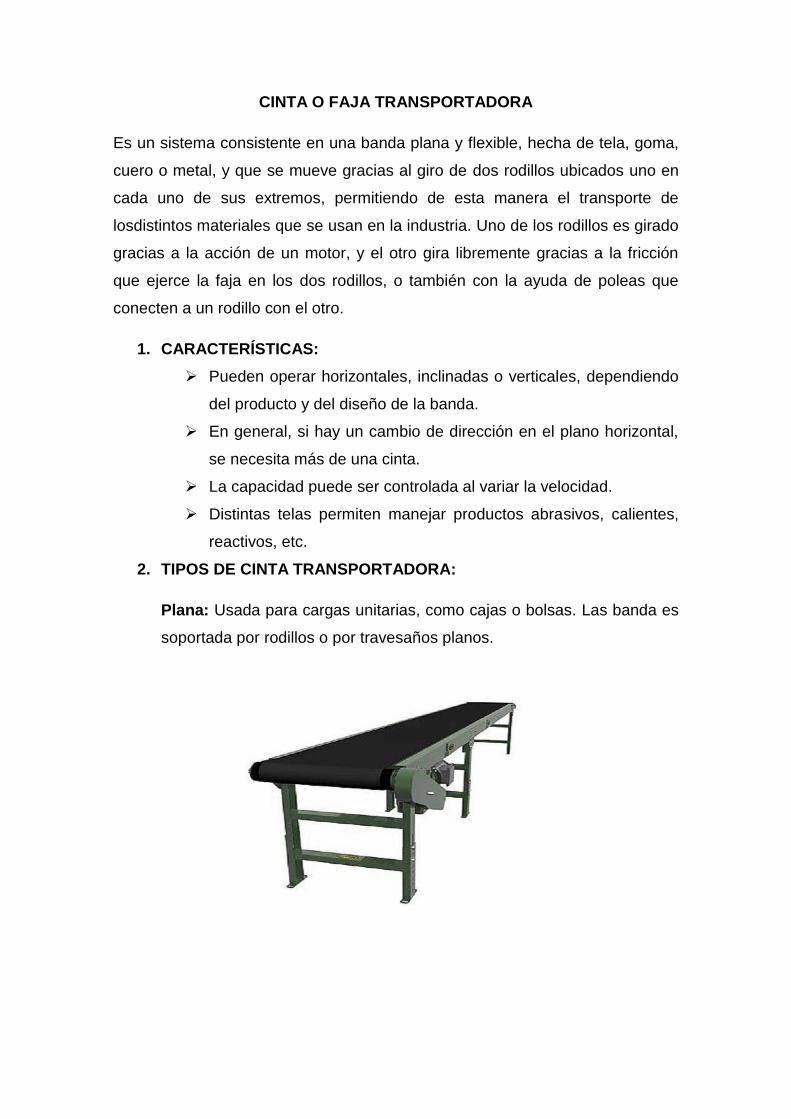
CINTA O FAJA TRANSPORTADORA
Es un sistema consistente en una banda plana y flexible, hecha de tela, goma,
cuero o metal, y que se mueve gracias al giro de dos rodillos ubicados uno en
cada uno de sus extremos, permitiendo de esta manera el transporte de
losdistintos materiales que se usan en la industria. Uno de los rodillos es girado
gracias a la acción de un motor, y el otro gira libremente gracias a la fricción
que ejerce la faja en los dos rodillos, o también con la ayuda de poleas que
conecten a un rodillo con el otro.
1. CARACTERÍSTICAS:
Pueden operar horizontales, inclinadas o verticales, dependiendo
del producto y del diseño de la banda.
En general, si hay un cambio de dirección en el plano horizontal,
se necesita más de una cinta.
La capacidad puede ser controlada al variar la velocidad.
Distintas telas permiten manejar productos abrasivos, calientes,
reactivos, etc.
2. TIPOS DE CINTA TRANSPORTADORA:
Plana: Usada para cargas unitarias, como cajas o bolsas. Las banda es
soportada por rodillos o por travesaños planos.

Cóncava: Se usan para
productos a granel. La banda es
soportada por 3 o 5 rodillos de
forma que los bordes se elevan
con respecto al centro,
formando una concavidad.
Esto aumenta la capacidad de
transporte. El retorno de la cinta es plano, soportado por rodillos rectos.
Pueden cubrir distancias de varios kilómetros y llevar miles de
toneladas.
Tubular: Es un diseño especial por el cual, después de cargar la cinta,
los bordes se pegan uno contra otro, envolviendo el producto. Es una
alternativa habitual para prevenir contaminación. Pueden doblar en más
de un plano.
Metálica: Es una cinta plana enla
cual la banda es remplazadapor una
malla de alambre o unacadena
plana. Los extremos seconectan
mediante remaches.
Se usa ampliamente en la industria
alimenticia. Puede soportar
temperaturas de hasta1000 ºC.

Cerrada: Se refiere a la estructura de soporte más que a la cinta. La
cinta queda encerrada en cajones de metal para evitar problemas de
contaminación o pérdidas de producto.
Portátil: Son cintas de pequeñas
dimensiones y capacidades, de diseño
modular, que cuentan con ruedas para
transportarse de un sitio a otro.
Pueden usar para descargar/cargar
camiones, apilar bolsas dentro de
depósitos o recuperar producto de
pilas al aire libre.
Sumergida: Son diseños en los que el lado útil es el tramo inferior de la
cinta. Se usan para recuperación de producto en tolvas de recibo. La
cinta puede o no tener orificios. Si los tiene, el movimiento se da por
arrastre como en un redler.

3. COMPONENTES PRINCIPALES DE UNA CINTA O FAJA
TRANSPORTADORA:
A. Banda Transportadora:
Es el componente principal y
su función es soportar
directamente el material a
transportar y desplazarlo
desde el punto de carga
hasta el de descarga, razón
por la cual se la puede
considerar el componente principal de las cintas
transportadoras; también en el aspecto económico es, en
general, el componente de mayor precio.
B. Rodillos:
Consisten en cilindros de metal que giran sobre rodamientos
anti-fricción.
Existen dos clases de rodillos en una cinta:
De Trabajo: Son que están hechos para soportan
carga.
De Dirección:Son aquellos que mantienen centrada a
la banda.

Las funciones que cumple el rodillo son principalmente dos:
Soportar la banda y el material a transportar por la misma; los
rodillos del ramal situado en una zona de carga, deben soportar
además el impacto producido por la caída del material.
Contribuir al centrado de la banda, por razones diversas la banda
esta sometida a diferentes fuerzas que tienden a descentrarla de
su posición recta ideal. El centrado de la misma se logra en parte
mediante la adecuada disposición de los rodillos, tanto portantes
como de retorno.
Los rodillos más utilizados son:
Rodillos de Alineación: Sirven para alinear la banda dentro de la
propia instalación.
Rodillos de Impacto:Recubiertos de discos de goma para
absorber los golpes provocados por la caída de bloques en las
tolvas de recepción.
Rodillos de Retorno:Los cuales están formados con discos de
goma.
Rodillo cilíndrico:Con la superficie exterior lisa, tal como la
obtenida mediante el empleo de tubos de acero (es el más
empleado).
Rodillo cilíndrico con aros de goma:Son adecuados para
soportar los fuertes impactos del material en las zonas de carga,
mientras que si se montan en los rodillos de retorno, deben ser
adecuados para facilitar la limpieza de la banda.
C. Bastidores:
Los bastidores son estructuras metálicas que constituyen el
soporte de la banda transportadora y demás elementos de la
instalación entre el punto de alimentación y el de descarga del
material.

Los bastidores son el
componente más sencillo de
las cintas, y su función es
soportar las cargas del
material, banda, rodillos y las
posibles cubiertas de protección contra el viento.
D. Reductores de Velocidad:
Son dispositivos colocados sobre la superficie de la rodadura,
cuya finalidad es la de mantener unas velocidades de
circulación reducidas a lo largo de ciertos tramos de vía.
POLEAS
Las poleas son ruedas que
tienen el perímetro exterior
diseñado especialmente para
facilitar el contacto con
cuerdas o correas.
En toda polea se distinguen
tres partes: cuerpo, cubo y
garganta.

El cuerpo: Es el elemento que une el cubo con la garganta. En algunos
tipos de poleas está formado por radios o aspas para reducir peso y
facilitar la ventilación de las máquinas en las que se instalan.
El cubo: Es la parte central que comprende el agujero, permite
aumentar el grosor de la polea para aumentar su estabilidad sobre el
eje. Suele incluir un chavetero que facilita la unión de la polea con el eje
o árbol (para que ambos giren solidarios).
La garganta (o canal): Es la parte que entra en contacto con la cuerda
o la correa y está especialmente diseñada para conseguir el mayor
agarre posible. La parte más profunda recibe el nombre de llanta. Puede
adoptar distintas formas (plana, semicircular, triangular...) pero la más
empleada hoy día es la trapezoidal.
Básicamente la polea se utiliza para dos fines: cambiar la dirección de una
fuerza mediante cuerdas o transmitir un movimiento giratorio de un eje a otro
mediante correas.
En el primer caso tenemos una polea de cable que puede emplearse bajo la
forma de polea fija, polea móvil o polipasto. Su utilidad se centra en la
elevación de cargas (pastecas, grúas, ascensores...), cierre de cortinas,
movimiento de puertas automáticas, etc.

En el segundo caso tenemos una polea de correa que es de mucha utilidad
para acoplar motores eléctricos a otras máquinas (compresores, taladros,
ventiladores, generadores eléctricos, sierras...) pues permite trasladar un
movimiento giratorio de un eje a otro. Con este tipo de poleas se construyen
mecanismos como el multiplicador de velocidad, la caja de velocidad y el tren
de poleas.
ENCODER
Es un transductor rotativo que transforma un movimiento angular en una serie
de impulsos digitales. Estos impulsos generados pueden ser utilizados para
controlar los desplazamientos de tipo angular o de tipo lineal.
Las señales eléctricas de rotación pueden ser elaborados mediante controles
numéricos(CNC), contadores lógicos programables (PLC), sistemas de control,
etc.
1. TIPOS DE ENCODER:
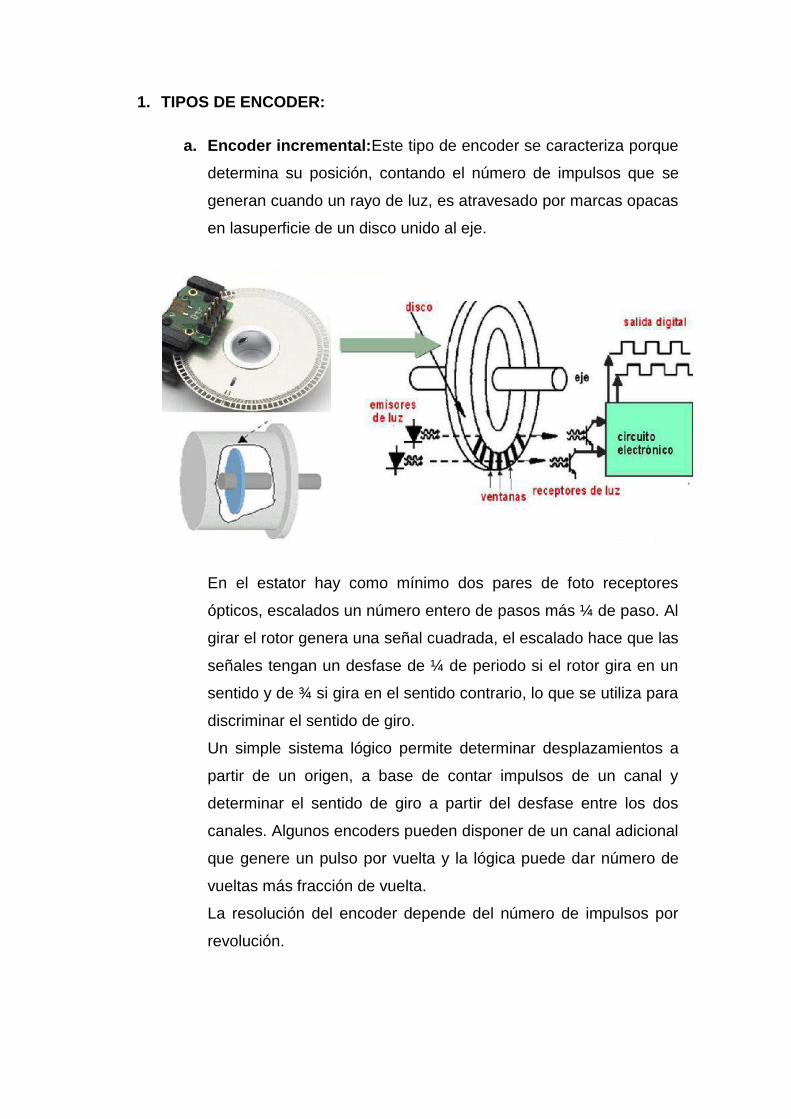
a. Encoder incremental:Este tipo de encoder se caracteriza porque
determina su posición, contando el número de impulsos que se
generan cuando un rayo de luz, es atravesado por marcas opacas
en lasuperficie de un disco unido al eje.
En el estator hay como mínimo dos pares de foto receptores
ópticos, escalados un número entero de pasos más ¼ de paso. Al
girar el rotor genera una señal cuadrada, el escalado hace que las
señales tengan un desfase de ¼ de periodo si el rotor gira en un
sentido y de ¾ si gira en el sentido contrario, lo que se utiliza para
discriminar el sentido de giro.
Un simple sistema lógico permite determinar desplazamientos a
partir de un origen, a base de contar impulsos de un canal y
determinar el sentido de giro a partir del desfase entre los dos
canales. Algunos encoders pueden disponer de un canal adicional
que genere un pulso por vuelta y la lógica puede dar número de
vueltas más fracción de vuelta.
La resolución del encoder depende del número de impulsos por
revolución.

b. Encoder absoluto:En el encoder absoluto, el disco contiene
varias bandas dispuestas en forma de coronascirculares
concéntricas, dispuestas de tal forma que en sentido radial el rotor
quedadividido en sectores, con marcas opacas y transparentes.
Según la posición del disco, la luz emitida por cada emisor se
enfrentará a un sector opaco o transparente.
Si se enfrenta a un sector opaco, la luz se refleja y el
receptor recibe la señal.
Si se enfrenta a un sector transparente, la luz no se
refleja y el receptor no recibe la señal.
Las diferentes combinaciones posibles de sectores dan origen
a una señal de salida digital formada por cuatro bits que puede
ser posteriormente procesada.

Generalmente, los encoders incrementales proporcionan
mayor resolución a un costo más bajo que los encoders
absolutos. Además, su electrónica es más simple ya que
tienen menos líneas de salida.
VISTA INTERNA DE UN MOTOR CON ENCODER
2. APLICACIONES DE LOS ENCODERS:
Los encoders pueden ser utilizados en una gran variedad de
aplicaciones. Actúan como transductores de retroalimentación para el
control de la velocidad en motores, como sensores para medición, de
corte y de posición. También como entrada para velocidad y controles
de rango.
A continuación se relacionan algunos ejemplos:
Dispositivo de control de puertas.
Robótica.

Maquinas de lente demoledor.
Plotter.
Soldadura ultrasónica.
Maquinaria convertidora.
Maquinas de ensamblaje.
Maquinas etiquetadoras.
Indicación x/y.
Dispositivos de análisis.
Maquinas taladradoras.
Maquinas mezcladoras.
Equipo médico.
MOTORES DC
Los motores DC soy muy utilizados en robótica,
existen de distintos tamaños, formas y potencia,
pero todos se basan en el mismo principio de
funcionamiento.
El principio de funcionamiento de este motor es
muy simple, ya que solo es necesario aplicar la
tensión de alimentación entre sus terminales
para invertir el sentido del giro, basta con invertir la alimentación y el
motor comenzara a girar en sentido opuesto.
Componentes de un Motor DC:
Rotor: Constituye la parte móvil del motor, proporciona el torque
para mover a la carga, está formado por:
Eje: formado por una barra de acero fresada. Imparte la rotación
al núcleo, devanado y al colector

Núcleo: se localiza sobre el eje. Fabricado con capas laminadas
de acero, su función es proporcionar un trayecto magnético entre
los polos para que el flujo magnético del devanado circule.
Devanado: consta de bobinas aisladas entre si y entre el núcleo
de la armadura. Estas bobinas están alojadas en las ranuras, las
cuales están conectadas eléctricamente con el colector, el cual
debido a su movimiento rotatorio, proporciona un camino de
conducción conmutado.
Colector: denominado también conmutador, está constituido de
laminas de material conductor (delgas), separadas entre si y del
centro del eje por un material aislante, para evitar cortocircuito
con dichos elementos. El colector se encuentra sobre uno de los
extremos del eje del rotor, de modo que gira con este y está en
contacto con las escobillas. La función del colector es recoger la
tensión producida por el devanado inducido, transmitiéndola al
circuito por medio de las escobillas (llamadas también cepillos).
Estator: constituye la parte fija de la máquina. Su función es
suministrar el flujo magnético que será usado por el bobinado del
rotor para realizar su movimiento giratorio.
Armazón: denominado también yugo, tiene dos funciones
primordiales: servir como el soporte y proporcionar una trayectoria
de retorno al flujo magnético del rotor y del imán permanente,
para completar el circuito magnético.
Imán permanente: compuesto de material ferro magnético
altamente remanente, se encuentra fijado al armazón o carcasa
del estator. Su función es proporcionar un campo magnético
uniforme al devanado del rotor o armadura, de modo que
interactué con el campo formado por el bobinado, y se origine el
movimiento del rotor como resultado de la interacción de estos
campos.

Escobillas: las escobillas están fabricadas de carbón, y poseen
una dureza menor que la del colector, para evitar que este se
desgaste rápidamente. Se encuentran albergadas por los porta
escobillas. Ambas, escobillas y porta escobillas, se encuentran en
una de las tapas del estator. La función de las escobillas es
transmitir la tensión y corriente de la fuente de alimentación hacia
el colector y, por consiguiente, al bobinado del rotor.
MICROCONTROLADORES
1. ¿QUE ES UN MICROCONTROLADOR?
Un microcontrolador es un circuito integrado programable que incluye en
su interior las tres unidades funcionales de una computadora: unidad
central de procesamiento, memoria y periféricos de entrada y salida, los
cuales le permiten llevar a cabo procesos lógicos. Estos procesos o
acciones son programados en lenguaje ensamblador por el usuario, y
son introducidos en el micro controlador a través de un programador.

2. ARQUITECTURA INTERNA
a. La arquitectura Neumann:
La arquitectura tradicional de computadoras y microprocesadores se
basa en el esquema propuesto por John Von Neumann, en el cual la
unidad central de proceso, o CPU, está conectada a una memoria
única que contiene las instrucciones del programa y los datos.
Las principales limitaciones de esta arquitectura son:
La longitud de las instrucciones es limitada por la unidad de longitud
de datos por lo que se tiene que hacer varios accesos a memoria
para buscar instrucciones complejas.
La velocidad de operación está limitada por el cuello de botella quese
forma al tener un único bus de datos e instrucciones.
b. La arquitectura Harvard
La arquitectura conocida como Harvard, consiste simplemente en
unesquema en el que el CPU está conectado a dos memorias por
intermediode dos buses separados. Una de las memorias contiene
solamente lasinstrucciones del programa, y es llamada Memoria de
Programa. La otramemoria solo almacena los datos y es llamada
Memoria de Datos. Ambosbuses son totalmente independientes y
pueden ser de distintos anchos.

Las ventajas de esta arquitectura son:
El tamaño de las instrucciones no está relacionado con el de losdatos,
por lo que permite que cada instrucción solo ocupe una solaposición de
memoria de programa.
La velocidad de acceso aumenta al poseer acceso deinstrucciones
separado del acceso de los datos.
3. COMPONENTES:
a. PROCESADOR:
Es el elemento más importante del microcontrolador y determina sus
principales características, tanto a nivel hardware como software. Se
encarga de direccionar la memoria de instrucciones, recibir el código
de la instrucción en curso, su decodificación y la ejecución de la
operación que implica la instrucción, así como la búsqueda de los
operandos y el almacenamiento del resultado.
b. MEMORIAS:
MEMORIA DE PROGRAMA:
Es aquella en donde se almacenen todas las instrucciones del
programa de control, por ello es que también recibe el nombre
de memoria de instrucciones. Como el programa a ejecutar
siempre es el mismo, debe estar grabado de forma
permanente.
Los tipos de memoria adecuados para soportar esta función
admiten cinco versiones diferentes:
ROM con máscara:
Es una memoria no volátil de solo lectura cuyo contenido se
graba en el chip durante el proceso de su fabricación mediante
el uso de «máscaras». Los altos costes de diseño e
instrumental sólo aconsejan usar este tipo de memoria cuando
se precisan series muy grandes.
EPROM:
Es una memoria no volátil que puede ser borrada y gravada
muchas veces.
Su grabación se realiza mediante un dispositivo físico
gobernado desde un computador personal, que recibe el
nombre de grabador. En la superficie de la cápsula del
microcontrolador existe una ventana de cristal por la que se
puede someter al chip de la memoria a rayos ultravioletas para
producir su borrado y emplearla nuevamente. Es interesante la
memoriaEPROM en la fase de diseño y depuración de los
programas, pero su coste unitario es elevado.
OTP (Programable una vez):
Es un modelo de memoria no volátil de solo lectura que sólo
se puede grabar una vez por parte del usuario, utilizando el
mismo procedimiento que con la memoria EPROM.
Posteriormente no se puede borrar. Su bajo precio y la
sencillez de la grabación aconsejan este tipo de memoria para
prototipos finales y series de producción cortas.
EEPROM, E2EPROM O E2PROM:
La grabación es similar a las memorias OTP y EPROM, pero
el borrado es mucho más sencillo al poderse efectuar de la
misma forma que el grabado, o sea, eléctricamente. Sobre el
mismo zócalo del grabador puede ser programada y borrada
tantas veces como se quiera, lo cual la hace ideal en la
enseñanza y en la creación de nuevos proyectos.
Aunque se garantiza 1.000.000 de ciclos de escritura/borrado
en una EEPROM, todavía su tecnología de fabricación tiene
obstáculos para alcanzar capacidades importantes y el tiempo
de escritura de las mismas es relativamente grande y con
elevado consumo de energía.
FLASH:
Se trata de una memoria no volátil, de bajo consumo, que se
puede escribir y borrar en circuito al igual que las EEPROM,
pero suelen disponer de mayor capacidad que estas últimas.
El borrado sólo es posible con bloques completos y no se
puede realizar sobre posiciones concretas. En las FLASH se
garantizan 1.000 ciclos de escritura-borrado.
Son muy recomendables en aplicaciones en las que sea
necesario modificar el programa a lo largo de la vida del
producto, como consecuencia del desgaste o cambios de
piezas.
Por sus mejores prestaciones está sustituyendo a la memoria
EEPROM para contener instrucciones.
MEMORIA DE DATOS:
Los datos que manejan los programas varían continuamente,
y esto exige que la memoria que les contiene deba ser de
lectura y escritura, por lo que la memoria RAM estática
(SRAM) es la más adecuada, aunque sea volátil.

Hay microcontroladores que también disponen como memoria
de datos una de lectura y escritura no volátil, del tipo
EEPROM. De esta forma, un corte en el suministro de la
alimentación no ocasiona la pérdida de la información, que
está disponible al reiniciarse el programa.
c. PUERTOS DE ENTRADAS Y SALIDAS E/S:
Los puertos o puertas E/S son aquellos pines del microcontrolador
que permiten comunicarse con los periféricos externos que este
controla activándolos o desactivándolos.
Estospuertos, son la principal utilidad de las patitas opines de un
microcontrolador, y pueden manejar información en forma paralela.
Las señales que se intercambian a través de los puertos pueden ser
digitales o analógicas dependiendo del tipo de microcontrolador.
4. RECURSOS AUXILIARES:
a. CIRCUITO DE RELOJ:
Es un circuito oscilador que se encarga de generar una onda
cuadrada de alta frecuencia, que configura los impulsos de reloj
usados en la sincronización de todas las operaciones del sistema.
b. TEMPORIZADORES:
Este recurso está orientado a controlar tiempos establecidos o
planteados por el usuario.
c. PERRO GUARDIÁN (WATCHDOG):
Está destinado a provocar una re inicialización cuando el
programa queda bloqueado.
d. CONVERSORES A/D Y D/A:
Este recurso permite convertir una señal analógica a digital o
viceversa.
5. PIC 16F877A:
El microcontrolador PIC16F877A es un circuito integrado programable
que permite controlar el funcionamiento de una determinada tarea.
Pertenece a la familia PIC16FXX, fabricado por la empresa Microchip
Technology Inc.
Este dispositivo se presenta en un encapsulado de 40 pines
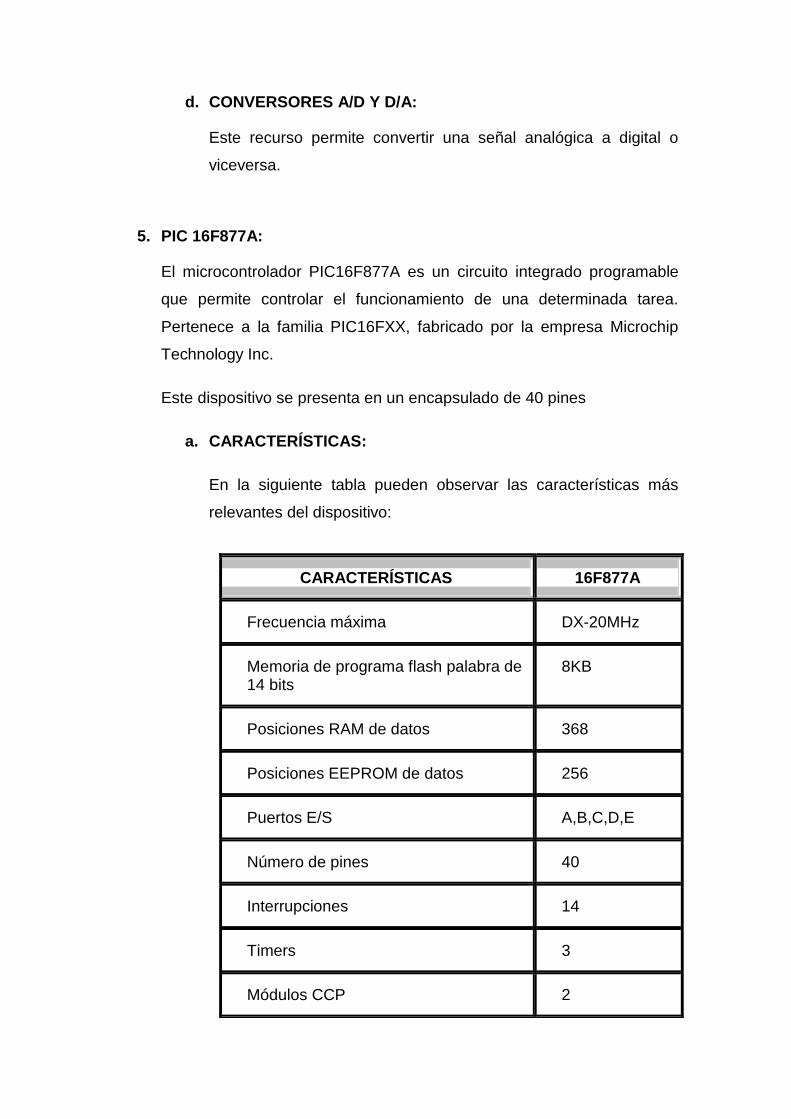
a. CARACTERÍSTICAS:
En la siguiente tabla pueden observar las características más
relevantes del dispositivo:
CARACTERÍSTICAS 16F877A
Frecuencia máxima DX-20MHz
Memoria de programa flash palabra de 14 bits
8KB
Posiciones RAM de datos 368
Posiciones EEPROM de datos 256
Puertos E/S A,B,C,D,E
Número de pines 40
Interrupciones 14
Timers 3
Módulos CCP 2

b. DESCRIPCIÓN DE LOS PUERTOS:
Puerto A:Puerto de e/s de 6 pines.
RA0 è RA0 y AN0
RA1 è RA1 y AN1
RA2 è RA2, AN2 y Vref-
RA3 è RA3, AN3 y Vref+
RA4 è RA4, (Salida en colector abierto) y
T0CKI(Entrada de reloj del modulo Timer0)
RA5 è RA5, AN4 y SS (Selección esclavo para el
puerto serie síncrono)
Puerto B:Puerto e/s 8 pines.
Presenta resistencias pull-up programables.
Comunicaciones Serie MSSP, USART
Comunicaciones paralelo PSP
Líneas de entrada de CAD de 10 bits 8
Juego de instrucciones 35 Instrucciones
Longitud de la instrucción 14 bits
Arquitectura Harvard
CPU Risc
Canales Pwm 2
Pila Hardware -
Ejecución En 1 Ciclo Máquina -

RB0 è Interrupción externa.
RB4-7 interrupción por cambio de flanco.
RB5-RB7 y RB3 Programación y depuración en
circuito.
Puerto C:Puerto e/s de 8 pines.
RC0 è RC0, T1OSO (Timer1 salida oscilador) y
T1CKI (Entrada de reloj del modulo Timer1).
RC1-RC2 è PWM/COMP/CAPT
RC1 è T1OSI (entrada oscilador timer1)
RC3-4 è IIC
RC3-5 è SPI
RC6-7 è USART
Puerto D:Puerto e/s de 8 pines.
Bus de datos en PPS (Puerto paralelo esclavo)
Puerto E:Puerto de e/s de 3 pines.
RE0 è RE0 y AN5 y Lectura de PPS
RE1 è RE1 y AN6 y Escritura de PPS
RE2 è RE2 y AN7 y CS de PPS
La máxima capacidad de corriente de cada línea es:
25 mA, cuando el pin consume o recibe corriente. Sin embargo, la
suma de las intensidades por las 5 líneas del puerto A no puede
exceder de 80 mA, ni la suma de las 8 líneas del puerto B puede
exceder de 150 mA.
20 mA, cuando el pin proporciona corriente. Sin embargo la suma
de las intensidades por las 5 líneas del puerto A no puede

exceder de 50 mA, ni la suma de las 8 líneas del puerto B puede
exceder de 100 mA.
Presenta un circuito oscilador o de reloj interno, que es el que le
indica la velocidad de trabajo. Este genera una onda cuadrada de
alta frecuencia que se utiliza como señal para sincronizar todas
las operaciones del sistema.
Para definir la frecuencia de trabajo se requiere de algunos
componentes externos, como un cristal de cuarzo o una red RC.
Permite 5 tipos de osciladores para definir la frecuencia de
trabajo:
XT: Cristal de cuarzo.
RC: Oscilador con resistencia y condensador.
HS: Cristal de alta velocidad.
LP: Cristal para baja frecuencia y bajo consumo de potencia.
Externa: Cuando se aplica una señal de reloj externa.
Cuenta con un pin de reset, el cual reinicializa el funcionamiento
del microcontrolador cuando se le aplica un nivel lógico bajo (“0”).
Este pin se denomina MCLR (Máster Clear).
c. ARQUITECTURA INTERNA:Está compuesto por:
Memoria de programa tipo ROM Flash de 1K x 14 bits.
Memoria de datos dividida en 2 áreas:
Área RAM constituida por 22 registros de propósito
específico y 68 de propósito general.
Área EEPROM de datos formada por 64 registros de 8 bits.
ALU (Arithmetic Logic Unit) de 8 bits y registro de trabajo
W, del que normalmente recibe un operando que puede
ser cualquier registro, memoria, puerto de entrada/salida o
el propio código de instrucción.

d. ORGANIZACIÓN DE LA MEMORIA:Se dispone de tres bloques
de memoria:
Memoria de Programa: En sus 1024 posiciones contiene
el programa con las instrucciones que gobiernan la
aplicación. Es del tipo no volátil, es decir, el programa se
mantiene aunque desaparezca la alimentación.
Memoria de Datos RAM: Se destina a guardar las
variables y datos. Es volátil, es decir, los datos
almacenados se borran cuando desaparece la
alimentación.
Memoria EEPROM de Datos: Es una pequeña área de
memoria de datos de lectura y escritura no volátil, gracias a
la cual, un corte del suministro de la alimentación no
ocasiona la pérdida de la información, que estará
disponible al reinicializarse el programa.
e. DISPOSITIVOS PERIFÉRICOS:
Timer0: Temporizador-contador de 8 bits con preescaler
de 8 bits
Timer1: Temporizador-contador de 16 bits con preescaler
que puede incrementarse en modo sleep (dormir) de forma
externa por un cristal/clock.
Timer2:Temporizador-contador de 8 bits con preescaler y
postescaler.
Dos módulos de Captura, Comparación, PWM (Modulación
de Anchura de Impulsos).
Conversor A/D de 1 0 bits.
Puerto Serie Síncrono Master (MSSP) con SPI e I2C
(Master/Slave).

USART/SCI (Universal Syncheronus Asynchronous
Receiver Transmitter) con 9 bit.
Puerta Paralela Esclava (PSP) solo en encapsulados con
40 pines.
f. DIAGRAMA DE PINES DEL PIC16F877A:

g. DESCRIPCIÓN DE PINES:
NOMBRE DEL PIN PIN TIPO TIPO DE
BUFFER DESCRIPCIÓN
OSC1/CLKIN 13 I ST/MOS
Entrada del oscilador
de cristal / Entrada de
señal de reloj externa.
OSC2/CLKOUT 14 O - Salida del oscilador
de cristal.
MCLR/Vpp/THV 1 I/P ST
Entrada del Máster
clear (Reset) o
entrada de voltaje de
programación o modo
de control high voltaje
test
RA0/AN0
RA1/AN1
RA2/AN2/ Vref-
RA3/AN3/Vref+
RA4/T0CKI
RA5/SS/AN4
2
3
4
5
6
7
I/O
I/O
I/O
I/O
I/O
I/O
TTL
TTL
TTL
TTL
ST
TTL
PORTA es un puerto
I/O bidireccional
RAO: puede ser
salida analógica 0
RA1: puede ser salida
analógica 1
RA2: puede ser salida
analógica 2 o
referencia negativa de
voltaje
RA3: puede ser salida
analógica 3 o
referencia positiva de

voltaje
RA4: puede ser
entrada de reloj el
timer0.
RA5: puede ser salida
analógica 4 o el
esclavo seleccionado
por el puerto serial
síncrono.
RBO/INT
RB1
RB2
RB3/PGM
RB4
RB5
RB6/PGC
RB7/PGD
33
34
35
36
37
38
39
40
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
TTL/ST
TTL
TTL
TTL
TTL
TTL
TTL/ST
TTL/ST
PORTB es un puerto
I/O bidireccional.
Puede ser
programado todo
como entradas
RB0 pude ser pin de
interrupción externo.
RB3: puede ser la
entada de
programación de bajo
voltaje
Pin de interrupción
Pin de interrupción
Pin de interrupción.
Reloj de
programación serial
RCO/T1OSO/T1CKI
RC1/T1OS1/CCP2
RC2/CCP1
RC3/SCK/SCL
15
16
17
I/O
I/O
I/O
ST
ST
ST
PORTC es un puerto
I/O bidireccional
RCO puede ser la
salida del oscilador
timer1 o la entrada de
reloj del timer1

RC4/SD1/SDA
RC5/SD0
RC6/Tx/CK
RC7/RX/DT
18
23
24
25
26
I/O
I/O
I/O
I/O
I/O
ST
ST
ST
ST
ST
RC1 puede ser la
entrada del oscilador
timer1 o salida PMW
2
RC2 puede ser una
entrada de captura y
comparación o salida
PWN
RC3 puede ser la
entrada o salida serial
de reloj síncrono para
modos SPI e I2C
RC4 puede ser la
entrada de datos SPI
y modo I2C
RC5 puede ser la
salida de datos SPI
RC6 puede ser el
transmisor asíncrono
USART o el reloj
síncrono.
RC7 puede ser el
receptor asíncrono
USART o datos
síncronos

RD0/PSP0
RD1/PSP1
RD2/PSP2
RD3/PSP3
RD4/PSP4
RD5/PSP5
RD6/PSP6
RD7/PSP7
19
20
21
22
27
28
29
30
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
ST/TTL
ST/TTL
ST/TTL
ST/TTL
ST/TTL
ST/TTL
ST/TTL
ST/TTL
PORTD es un puerto
bidireccional paralelo
REO/RD/AN5
RE1/WR/AN
RE2/CS/AN7
8
9
10
I/O
I/O
I/O
ST/TTL
ST/TTL
ST/TTL
PORTE es un puerto
I/O bidireccional
REO: puede ser
control de lectura para
el puerto esclavo
paralelo o entrada
analógica 5
RE1: puede ser
escritura de control
para el puerto
paralelo esclavo o
entrada analógica 6
RE2: puede ser el
selector de control
para elpuerto paralelo
esclavo o la entrada
analógica 7.
Vss 12.31 P - Referencia de tierra
para los pines lógicos

y de I/O
Vdd 11.32 P -
Fuente positiva para
los pines lógicos y de
I/O
NC - - - No está conectado
internamente
6. PIC 12F675:
El PIC 12F675 es un circuito encapsulado de 8
pines perteneciente a la familia de micros
"enanos" de Microchip, presenta una memoria
flashy un set de instrucciones de 14 bits, así
como un amplio rango en la tensión de
funcionamiento (2 a 5.5 voltios). Es económico,
y aunque solo tiene 6 pines aprovechables, se
le puede sacar buen partido para usarlo como descarga de procesos de
un microcontrolador más grande o como “cerebro” de distintos
automatismos simples.
CARACTERÍSTICAS:
Presenta un oscilador interno de 4 MHz.
6 pines de entrada y salida con control de dirección individual y
pull-up configurables.
Cada pin soporta una corriente de hasta 25 mA.
Modo SLEEP para ahorro de energía.
Memorias:
Memoria Flash de programa de 1024 x 14 palabras.
Memoria EEPROM de datos de 128 x 8 bytes.
Memoria de datos SRAM de 64 x 8 bytes.

Temporizadores/Contadores:
Timer0: Temporizador/contador de 8-bit con prescaler de
8-bit.
Timer1: Contador/temporizador de 16-bit con prescaler, se
puede incrementar en modo SLEEP a través de un
reloj/cristal externo.
Convertidor Analógico/Digital de 10 bits y 4 canales.
Presenta 1 comparador analógico con 16 niveles de referencia
interno.
DIAGRAMA DE PINES DEL PIC12F675:
FOTODIODO
Un fotodiodo es un semiconductor construido con una unión PN, de
funcionamiento opuesto a los LED, sensible a la incidencia de la luz visible o
infrarroja. Para que su funcionamiento sea
correcto se polariza inversamente, con lo
que se producirá una cierta circulación de
corriente cuando sea excitado por la luz.
Debido a su construcción, los fotodiodos
se comportan como células fotovoltaicas,
es decir, en ausencia de luz exterior
generan una tensión muy pequeña con el positivo en el ánodo y el negativo en
el cátodo. Esta corriente presente en ausencia de luz recibe el nombre de
corriente de oscuridad.

Para su Uso A diferencia del LDR , el fotodiodo
responde a los cambios de oscuridad a
iluminación y viceversa con mucha más
velocidad, y puede utilizarse en circuitos con
tiempo de respuesta más pequeño.
LED INFRARROJO (IR)
Representa otro tipo de LED, cuya característica es emitir una luz
correspondiente al espectro infrarrojo, entre 850 a 900 nm de longitud de onda,
es por que no puede ser visto por el ojo
humano. Estos diodos funcionan como
dispositivos de visión nocturna cuando la
luz ambiente resulta ser insuficiente. Se
emplean, ampliamente, en video porteros
domésticos para ver y grabar imágenes
en la obscuridad, para grabaciones de
noche con videocámaras con la función
“night-shot”, en mandos domésticos de
control remoto para el cambio de canales en los televisores y en muchas otras
aplicaciones enmarcadas dentro de los sectores de la electrónica doméstica e
industrial.
Su polarización es igual a la de un LED convencional, es decir, se polariza en
forma directa con la fuente.

LabVIEW
1. INSTRUMENTACIÓN VIRTUAL:
Nace a partir del uso del computador personal (PC) como "instrumento"
de medición de tales señales como temperatura, corriente, voltaje, voz,
y muchas otras variables físicas.
El concepto de instrumento virtual definido como "un instrumento que no
es real, se ejecuta en una computadora y tiene sus funciones definidas
por software". A este software de la empresa National Instruments se le
dio el nombre de Laboratory Virtual Instrument Engineering Workbench,
más comúnmente conocido por las siglas LabVIEW®.
Es un lenguaje de programación de alto nivel, de tipo gráfico, y
enfocado al uso en instrumentación. Pero como lenguaje de
programación, debido a que cuenta con todas las estructuras, puede ser
usado para elaborar cualquier algoritmo que se desee en cualquier
aplicación, como en medición, análisis y control de procesos, telemática,
juegos, manejo de textos, etc.
Los programas de LabVIEW son usualmente llamados VI (Virtual
Instruments) ya que estos parecen y operan como una imitación de los
instrumentos físicos, como osciloscopios y multímetro.
2. VENTAJAS:
Flexibilidad.
Bajo costo de mantenimiento.
La reusabilidad.
La personalización de cada instrumento.
Rápida incorporación de nuevas tecnologías.
Bajo costo por función.
Bajo costo por canal, etc.

3. PANEL FRONTAL:
Sirve como la interfaz de usuario que es donde los datos son
manipulados, controlados y monitoreados. El panel frontal se construye
con controles e indicadores, los cuales son las terminales de entradas y
salidas de un VI, respectivamente.
Los controles simulan instrumentos de entradas y entregan los datos en
el diagrama de bloques del VI, entre estos tenemos perillas, push
buttons (pulsadores), y otros dispositivos de entrada. Los indicadores
simulan los instrumentos de salida y muestran los datos que el
diagrama de bloques genera o adquiere, estos pueden ser gráficos,
LEDs, y otros displays.

ANALISIS DEL PROYECTO:
El desarrollo y avance que está teniendo la tecnología en la actualidad ha
permitido que el hombre pueda desarrollar sus distintas actividades con mayor
facilidad y rapidez. Por lo que, como alumnos de electrónica industrial hemos
decidido llevar a cabo un proyecto que permita cooperar de una manera
ingeniosa con este desarrollo que es a nivel global.
En el área de comercialización de los cueros existe una forma muy
rudimentaria de medición para llevar a cabo la compra y venta de cuero, por
ello nuestro proyecto estará orientado a dar solución a esta problemática.
El proyecto estará basado en una faja que trasportara el cuero a través de unos
rodillos, luego los sensores captaran el espacio ocupado por el cuero,
obteniendo una medida de área más precisa.
Este prototipo estará compuesto por una parte mecánica y otra electrónica, la
primera estará formada por dos pares de rodillos, que permitirán el
desplazamiento de la faja, lo cual se llevara a cabo mediante el acoplamiento
de un motor al eje de un rodillo, la parte electrónica estará formada por el
encoder, que contara las vueltas del rodillo, y los sensores que enviara los
datos obtenidos de la superficie del cuero a un micro controlador, este último se
encargara de enviar los datos recibidos por los sensores hacia una PC.
Los datos obtenidos desde el microcontrolador serán analizados mediante un
programa virtual que nos permitirá conocer el área respectiva de la superficie
medida.

DESARROLLO DEL PROYECTO
Teniendo en cuenta todo lo anteriormente expuesto, continuamos con el
desarrollo de nuestro proyecto.
1. DIAGRAMA DE BLOQUES DEL PROCESO:

2. DIAGRAMA ESQUEMÁTICO DEL CIRCUITO:
3. FUNCIONAMIENTO DEL CIRCUITO:
a. Etapa de detección de superficies:
Está compuesta por una fila de LEDs infrarrojos soldadas a una
placa de bakelita y montadas sobre una estructura en la parte
superior y una fila de fotodiodos en la parte inferior.
Teniendo en cuenta el tamaño y diámetro de cada fotodiodo se
decidió soldarlos con una separación de 1 cm de distancia entre
cada uno de ellos.la etapa de detección está compuesta
básicamente por 48 LEDs infrarrojos y 48 fotodiodos , con lo cual
se hace posible sensar superficies regulares o irregulares hasta
de 48 cm de ancho
Cuando una superficie sea trasportada por la faja y pase entre las
filas de fotodiodos y LEDs infrarrojos, los fotodiodos cubiertos por
esta enviarán una señal negativa (0 lógico) hacia un grupo de 6
buffers (circuitos integrados 74LS245), los cuales regenerarán la
señal, previamente habilitados por un microcontrolador.
b. Almacenamiento y Envió de datos:
Para generar el movimiento de los rodillos es necesario
conectarlo, a través de un par de piñones y una cadena, al eje de
un motor-reductor de DC. Junto a un rodillo se acopla un encoder,
el cual se encarga de enviar una serie de 100 pulsos por
revolución del rodillo.
Al microcontrolador se le programa para que detecte los pulsos
del encoder y envíe los datos por cada flanco de subida,
recepcionados de los sensores, hacia un computador.
Por cada pulso que recibe el microcontrolador del encoder, este
debe enviar los datos recibidos por los buffers, de forma serial
con un baud rate de 9200 baudios sin paridad.

c. Análisis del Diagrama de Bloques del VI (Programa de
Instrumentación Virtual labVIEW):
El bloque de programa recibe los datos enviados desde el puerto
serial COM X, a una velocidad de 9600 baudios por segundo y un
bit de parada sin paridad,. Si el número de bytes en la entrada del
búfer del puerto serial es mayor a siete y el primer carácter leído
es igual a 204 entonces los otros seis caracteres recibidos en
formato string (o cadena de datos) son transformados a un array
de bytes, estos caracteres o bytes son almacenados en un Índex
array (índice de array) para posteriormente ser transformados en
arrays booleanos con el fin visualizar los datos recibidos en el
panel frontal del VI
Los datos acumulados se multiplica por 2 π y el radio calculado,
para finalmente dividir entre 100,( son los pulsos que envía el
encoder por vuelta), por ultimo este valor se convierte a la unidad
necesaria a medir , como cm, pulgadas o pies cuadrados.
Finalmente los datos son visualizados en el panel frontal de
Lavbiew.

4. SELECCIÓN DE MATERIALES:
Los componentes electrónicos usados para la elaboración de la Faja
Medidora de Área de Cuero fueron los siguientes:
a. PIC 16F877A:
Este microcontrolador se usó por tener características necesarias
para nuestro proyecto como son:
Tiene 5 puertos de E/S, de los cuales usamos 4.
Tiene conversor A/D en todo el puerto A.
Tiene instrucciones por hardware para transmisión de
datos como son el HSEROUT.
Puede funcionar con cristal de 4 MHZ o 20 MHZ.
Estamos familiarizados con este PIC por ser de uso
continuo para nosotros.
Es de bajo costo.
Tienes muchas más características pero estas no las
hemos considerado porque no fueron necesarias para este
proyecto.
b. 74LS245:
Es un buffer o regenerador, lo usamos para evitar pérdidas
de voltaje por la distancia del cable hacia el PIC y así evitar
conflicto con el PIC al momento de leer el pulso, ya que por
debajo de 1.8V lo toma como un “0”.
Tiene 8 pines para regenerar.
Se puede elegir la dirección de regeneración ya sea de
AB=1 o de BA=0 por medio del pin 1.
Funciona con 5V.
Es de bajo costo.
Y lo más importante tiene un habilitador en el pin 19 para
hacer el multiplexado mediante el PIC.

c. CABLE USB-SERIAL:
Nos sirve para la interface entre el PIC y el programa
LABVIEW ya que la computadora portátil no cuenta con
puerto serial.
El costo no influye ya que es necesario para nuestro
proyecto.
d. FOTODIODOS Y LEDs INFRARROJOS:
Funcionan con 5V.
Rapidez de cambio de estado entre 0 y 1.
Bajo costo.
Fácil de implementar.

5. DISEÑO E IMPLEMENTACIÓN DEL CIRCUITO:
El proyecto se empezó a diseñar mediante el software LIVEWIRE
comúnmente conocido por todos los estudiantes y aficionados a la
electrónica.
Se eligió este software debido a su flexibilidad y fácil manejo de
herramientas en su entorno de trabajo además de tener múltiples
manuales y videos tutoriales que vienen muchas veces cuando
descargamos el software del internet.
Este entorno de trabajo a su vez se complementa con el software PCB-
WIZAR que en realidad es su complemento de trabajo ya que así lo
diseño el fabricante, con estos dos software diseñamos tanto el
esquemático del circuito como también las pistas que posteriormente se
quemarían en la baquelita.
Logros obtenidos con el software PCB WIZAR:

PCB Para Control de Motor DC:

6. DESARROLLO DEL PROGRAMA PARA EL PIC 16F877A:
Para que el microcontrolador pueda controlar el proceso, es necesario
realizar un programa que le permita cumplir una rutina de instrucciones,
las cuales las realizamos con la ayuda del software de programación
MicroCode Studio. Pero primeramente es importante, y de mucha ayuda,
desarrollar un diagrama de flujo en el cual se resuman las acciones y la
rutina que nosotros deseamos que cumpla el microcontrolador.
Nuestro diagrama de flujo realizado es el siguiente:
SI
LEE PULSOS DEL ENCODER
ENVIA DATOS POR PUERTO
SERIAL A LA PC
ALMACENA DATOS EN
VARIABLES
HABILITA PINES DEL
BUFFER
¿ES UN FLANCO
DE SUBIDA?
FIN
NO

7. PRUEBA DE FUNCIONAMIENTO Y DETECCIÓN DE FALLAS:
Completado el diseño de nuestro circuito, empezamos la construcción
de éste en una baquelita para corroborar su correcto funcionamiento.
La primera parte la Iniciamos con el microcontrolador PIC 16F877A y
sus componentes externos, descargando el programa desde nuestra PC
atreves de un programador con conexión USB, las respectivas salidas
del PIC previamente detalladas en nuestro diseño las conectamos a los
buffer que les correspondía a cada pin, en total fueron 6 buffer los que
usamos y cada buffer albergaba 8 receptores infrarrojos.
Al realizar la alimentación del microcontrolador procedimos a medir con
el multitester los pines de salida que correspondía a los habilitadores de
los buffer, estos deberían tener en un momento 5 voltios (1 lógico)
debido a que la habilitación de los buffer tenía que ser cíclica, Por lo que
los pines deberían estar habilitando y deshabilitando a los buffer
constantemente pero de forma ordenada (A0-A5) creando así un bucle.
La medición ahí fue correcta y según lo previsto.
La segunda parte consistió en armar las dos planchas de baquelitas que
contendrían a nuestros sensores, la primera a los 48 receptores
infrarrojos y la segunda los 48 emisores infrarrojos. En la baquelita de
los receptores infrarrojos se tuvo que hacer el cableado de forma
minuciosa hacia los buffer debido a que la información de todo nuestro
proyecto ingresaba atreves de estos receptores infrarrojos y cualquier
falso contacto o puente que ocurra ahí nos daría como resultado una
mala medición de nuestra área a tratar. Al conectar esta parte del
circuito tuvimos muchos inconvenientes que a continuación describo:
Debido que son muchos receptores y emisores infrarrojos,
cometimos el error de armar las dos baquelitas sin probar el
correcto funcionamiento de cada uno de ellos, lo cual al tener
todo listo y probar su funcionamiento nos arrojaba errores de
medición en nuestro programa de labview (solo algunos
funcionaban).

Debido a los constantes actos de soldar y desoldar los receptores
y emisores infrarrojos las pistas se comenzaron a salir de la
baquelita.
Debido a las constantes soldaduras que sufrieron las baquelitas
estas empezaron a formar curvas en el centro de ellas.
Para solucionar estos inconvenientes y fallas que sufrimos en esta parte
del proyecto tomamos las siguientes acciones para cada una ellas que a
continuación detallo:
Se procedió a conectar los 5 voltios a las dos baquelitas y con la
ayuda de una cámara de un celular se pudo verificar cual de los
emisores infrarrojos trabajaba correctamente. Cambiando
inmediatamente a los emisores defectuosos por unos nuevos. En
el caso de los receptores infrarrojos estos a su salida enviaban un
voltaje que comprendía de 3 – 5 voltios los cuales se podían
medir con el multitester.
Se procedió a acoplar las baquelitas con unos retazos de
maderas cortadas a medida. Las cuales estaban unidas con otras
en forma vertical formaban parte de la base, la función principal
de esto fue hacer coincidir a los emisores infrarrojos con los
receptores infrarrojos.
Se procedió a fabricar dos nuevas baquelitas y montar los
emisores y receptores infrarrojos ya previamente probando su
correcto funcionamiento.
Para finalizar, unimos las dos partes de todo nuestro circuito para
analizar si es que nuestro prototipo mediría correctamente las áreas
irregulares el cual era nuestro objetivo principal.

Al tener todo listo se empezó a poner en funcionamiento tanto la parte
mecánica como la electrónica, surgiendo nuevamente inconvenientes en
esta etapa final de nuestro proyecto que también detallo a continuación:
Al empezar a medir nuestras áreas irregulares el prototipo fallaba
en su medición, debido a que el motor en los rodillos de la faja se
detenía interrumpiendo el traslado del área a medir. Este
problema se debió a las poleas las cuales eran responsables de
detener al motor.
Solucionado todos los inconvenientes previamente detallados
anteriormente se logro hacer que el prototipo funcionara de manera
óptima y correcta para cual fue diseñada.

8. CONCLUSIONES Y RECOMENDACIONES:
CONCLUSIONES:
Se logró diseñar y construir satisfactoriamente el prototipo
medidor de área de cuero.
El uso de fotodiodos y LEDs infrarrojos nos permitió una
velocidad de transmisión de datos ideal para el proceso
realizado.
LabVIEW nos permitió obtener una medición precisa a través
de los diferentes cálculos que en este se realizó, así como la
visualización virtual del proceso.
Se obtuvo un margen de error de tan solo 0.3% en la
medición.
RECOMENDACIONES:
Se debe hacer coincidir los fotodiodos con los LEDs infrarrojos
uno a uno, con la mayor precisión posible, para que no exista
interferencia entre ellos y tengan un correcto funcionamiento.
La velocidad del motor que permite el movimiento de los
rodillos debe ser moderada y constante, para que de esta
manera Labview pueda leer correctamente los datos enviados
por los fotodiodos.

9. BIBLIOGRAFÍA:
¿Qué es una Cinta Transportadora? (s.f.) Recuperado el 12 de
diciembre del 2011, de
http://cyntia2010.wordpress.com/drawings/%C2%BFque-es-una
cinta-transportadora/
Cintas Transportadoras. (s.f.) Recuperado el 12 de diciembre del
2011, de
http://www.fing.edu.uy/iimpi/academica/grado/transind/teorico/Cla
se4-Cintas.pdf
Consideraciones para Reductores de Velocidad. (s.f.)
Recuperado el 14 de diciembre del 2011, de http://ingenieria-
civil2009.blogspot.com/2009/11/consideraciones-reductores-de-
velocidad.html
Encoder Incremental. (s.f.) Recuperado el 12 de diciembre del
2011, de
http://facultad.bayamon.inter.edu/arincon/encoderIncrementales.p
df
Encoders. (s.f.) Recuperado el 13 de diciembre del 2011, de
http://cmapspublic2.ihmc.us/rid=1H2F1807L-JP0SG2-
J1J/encoder.pdf
Manual de Aplicación de Encoders. (s.f.) Recuperado el 14 de
diciembre del 2011, de
http://www.westmexico.com.mx/pfd/dynapar/catalogos/4.-
Manual%20de%20Aplicacion%20de%20Encoders.pdf
Poleas. (s.f.) Recuperado el 15 de diciembre del 2011, de
http://teleformacion.edu.aytolacoruna.es/FISICA/document/fisicaIn
teractiva/poleas/pulley_indice.htm
Polea. (s.f.) Recuperado el 15 de diciembre del 2011, de
http://concurso.cnice.mec.es/cnice2006/material107/operadores/o
pe_polea.htm
Fotodiodo. (s.f.) Recuperado el 11 de diciembre del 2011, de
http://enciclopedia.us.es/index.php/Fotodiodo

Sensor Infrarrojo. (s.f.) Recuperado el 11 de diciembre del 2011,
de http://mecatronica.wordpress.com/2007/09/24/sensor-
infrarrojo/
PIC 12F675. (s.f.) Recuperado el 14 de diciembre del 2011, de
http://www.ucontrol.com.ar/wiki/index.php?title=Uso_Practico_del
_Pic12F675

ANEXOS:
Vista general de la Faja para la Medición de Área de Cueros.
Fotodiodos (parte superior) y LEDs Infrarrojos (parte inferior).
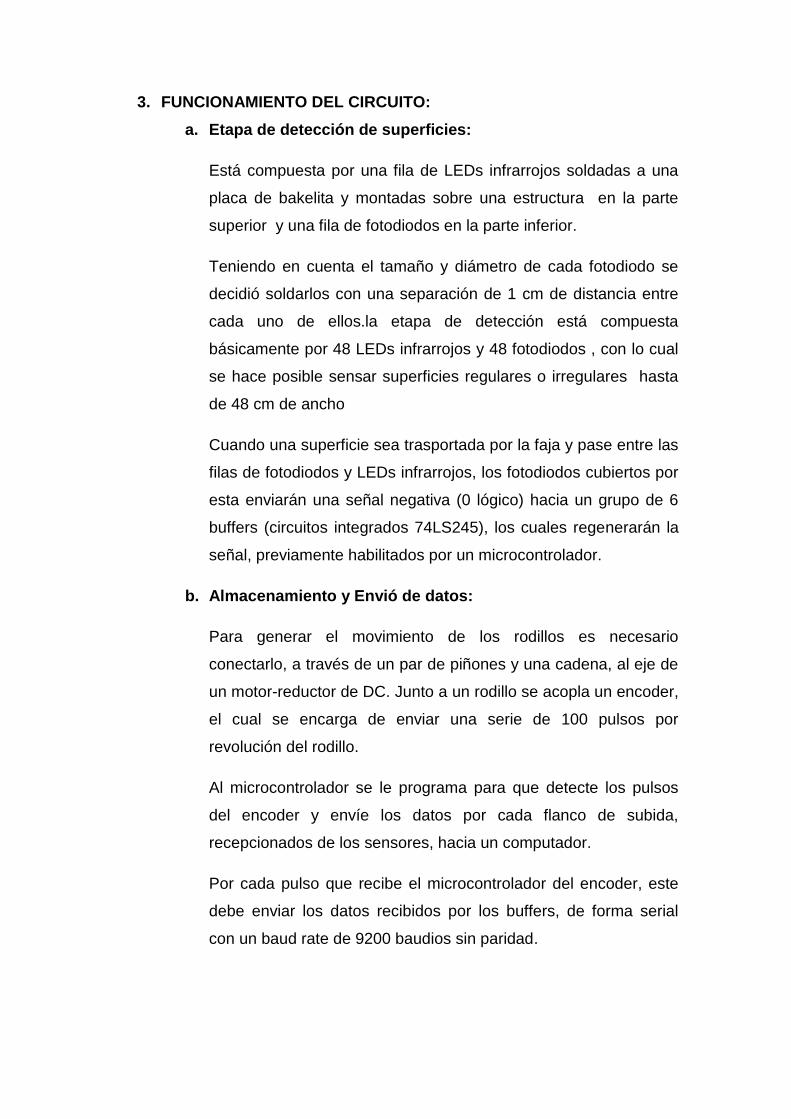
Poleas y Fajilla que enlazan las dos fajas a través de los rodillos.
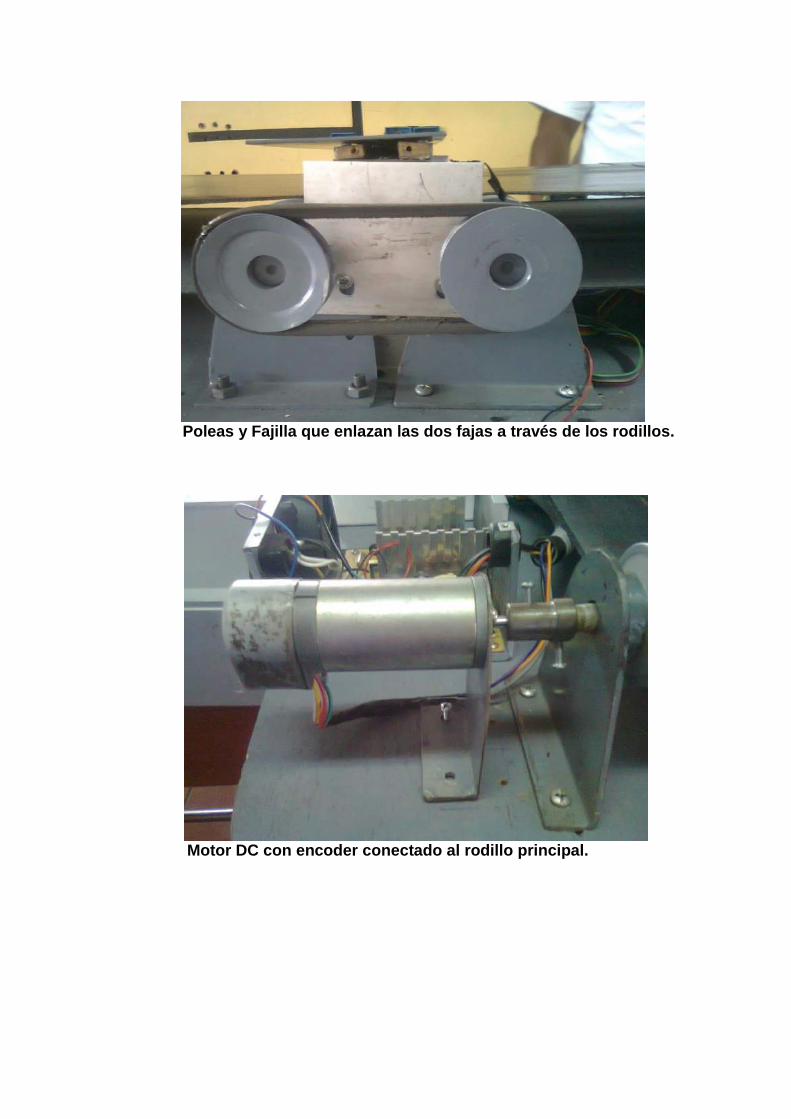
Motor DC con encoder conectado al rodillo principal.

Circuito de control con el PIC 16F877A.
Circuito de control de Velocidad del Motor con Encoder.

Circuito de interface entre los fotodiodos y el circuito de control
del PIC 16F877A.