
Inhalt (1. Semester) Seite Grundbegriffehorschem/medium/ingmaterial/FSIngMathe.pdfProf. Dr. Elmar...
39
Prof. Dr. Elmar Müller-Horsche FH Augsburg Formelsammlung Ingenieurmathematik 1 Die blauen Formeln hat der angehende Ingenieur im Kopf! Inhalt (1. Semester) Seite Grundbegriffe 3 Trigonometrische Funktionen 3 Additionstheoreme 3 Halb- Doppelwinkelformeln 3 Verschiebungen und Dehnungen 4 Kreis und Kugel 4 Parabel 4 Vektoren, Skalar- und Vektorprodukt 4 Binomische Formel Differenziation 5 Ableitung der elementaren Funktionen 6 Differenziationsregeln 6 Ableitung der Umkehrfunktion Höhere Funktionen 6 Logarithmus 6 Exponentialfunktion 7 Logarithmische Auftragungen 7 Arcusfunktionen 7 Hyperbolische Funktionen 7 Areafunktionen Taylorentwicklungen 8 Näherungen und Taylorreihe 8 Die wichtigsten Taylorreihen Integralrechnung 9 Hauptsatz der Analysis 9 Stammfunktion und unbestimmtes Integral 9 Integrationsregeln 10 Substitution 10 Partielle Integration 11 Nullstellen von Polynomen 11 Partialbruchzerlegungen 12 kompliziertere Partialbruchzerlegungen 13 Integraltafen: Grundintegrale 13 Integrale mit rationalen Funktionen 13 Integrale mit Wurzelfunktionen 14, 15 Integrale mit Winkelfunktionen 15 Integrale mit Arcusfunktionen 15 Integrale mit Exponentialfunktionen 16 Integrale mit Hyperbelfunktionen Anwendungen 16 Bogenlänge, Oberflächen der Integralrechnung 17 Volumen, Schwerpunkt, Moment, Arbeit Matrizen und 18 Matrix, Matrixmultiplikation lineare Gleichungs- 18 Rechenregeln, Definitionen, Determinante systeme 19 Gaußelimination 20,21 Rang einer Matrix, homogene, inhom. und allgemeine Lösung 22 Gauß-Jordan-Verfahren
Transcript of Inhalt (1. Semester) Seite Grundbegriffehorschem/medium/ingmaterial/FSIngMathe.pdfProf. Dr. Elmar...

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 1
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Inhalt (1. Semester)Seite
Grundbegriffe 3 Trigonometrische Funktionen3 Additionstheoreme3 Halb- Doppelwinkelformeln3 Verschiebungen und Dehnungen4 Kreis und Kugel4 Parabel4 Vektoren, Skalar- und Vektorprodukt4 Binomische Formel
Differenziation 5 Ableitung der elementaren Funktionen6 Differenziationsregeln6 Ableitung der Umkehrfunktion
Höhere Funktionen 6 Logarithmus6 Exponentialfunktion7 Logarithmische Auftragungen7 Arcusfunktionen7 Hyperbolische Funktionen7 Areafunktionen
Taylorentwicklungen 8 Näherungen und Taylorreihe8 Die wichtigsten Taylorreihen
Integralrechnung 9 Hauptsatz der Analysis9 Stammfunktion und unbestimmtes Integral9 Integrationsregeln
10 Substitution10 Partielle Integration11 Nullstellen von Polynomen11 Partialbruchzerlegungen12 kompliziertere Partialbruchzerlegungen13 Integraltafen: Grundintegrale13 Integrale mit rationalen Funktionen13 Integrale mit Wurzelfunktionen
14, 15 Integrale mit Winkelfunktionen15 Integrale mit Arcusfunktionen15 Integrale mit Exponentialfunktionen16 Integrale mit Hyperbelfunktionen
Anwendungen 16 Bogenlänge, Oberflächender Integralrechnung 17 Volumen, Schwerpunkt, Moment, Arbeit
Matrizen und 18 Matrix, Matrixmultiplikationlineare Gleichungs- 18 Rechenregeln, Definitionen, Determinante
systeme 19 Gaußelimination20,21 Rang einer Matrix, homogene, inhom. und allgemeine Lösung
22 Gauß-Jordan-Verfahren

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 2
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Inhalt (2. Semester)
SeiteKomplexe Zahlen 23 Kartesische und polare Darstellung
23 Rechenregeln23 Komplexe Schwingungen24 Komplexe Frequenzgänge
Fourierreihen, 25 Fourierreihendiskrete Fourier- 26 Anwendung der Fourieranalyse in der Schwingungslehre
Transformation 26 Diskrete Fouriertransformation27 Schnelle Fouriertransformation
Kurven und Flächen 27 Parametrische ebene Kurven28 Zylinder- und Kugelkoordinaten, 3D-Kurven28 Tangente, Normale, Krümmung28 Tangential- und Nomalbeschleunigung, 3D-Flächen
Partielle Ableitung 29 Partielle Ableitung,29 Tangentialebene29 Kettenregel, Gradient30 Höhere Ableitungen, Extremwerte30 Taylorreihen mehrerer Veränderlicher
Mehrfachintegrale 31 Flächenintegrale31 Oberflächeninhalt32 Statische Momente, Flächenschwerpunkt32 Flächenmomente 2. Grades32 Volumenintegrale33 Massenträgheitsmomente
Laplace- 33, 34 Definition, Anwendungen, wichtige BildfunktionenTransformation 34, 35 Rechenregeln, Transformationssätze
35 Rücktransformation durch Partialbruchzerlegung35 Korrespondenztafeln
Differenzial- 38 Definition, einfache Lösungsverfahrengleichungen (DGL) 39 Lösung mit der Laplacetransformation
39 Gekoppelte DGL-Systeme

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 3
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Grundbegriffe
TrigonometrischeFunktionen
2 2
1 2 3sin : sin 30 sin 45 sin 602 2 2
3 2 1cos : cos30 cos 45 cos 602 2 2
sintan : tan 45 1cos
sin cos 1 " "
GegenkatheteHypotenuse
AnkatheteHypotenuseGegenkathete
Ankathetex x trigonometrischer Pythagoras
= ° = ° = ° =
= ° = ° = ° =
= = ° =
+ =
Additionstheoremesin( ) sin cos cos sin
cos( ) cos cos sin sin
tan tantan( )1 tan tan
α β α β α β
α β α β α β
α βα βα β
± = ⋅ ± ⋅
± = ⋅ ⋅
±± =⋅
∓
∓
Halbwinkelformeln1 cossin
2 2
1 coscos2 2
1 cos sin 1 costan2 1 cos 1 cos sin
α α
α α
α α α αα α α
− = ±
+ = ±
− − = ± = = + +
Doppelwinkelformeln2 2 2 2
2
sin(2 ) 2 sin cos
cos(2 ) cos sin 2 cos 1 1 2 sin
2 tantan(2 )1 tan
α α α
α α α α α
ααα
= ⋅
= − = ⋅ − = − ⋅
⋅=−
Verschiebungen undDehnungen
Veränderung des Graphen in Formel ersetzenVerschiebung um a nach oben y durch y-aVerschiebung um b nach rechts x durch x-bDehnung um Faktor c nach oben y durch y/cDehnung um Faktor d nach rechts x durch x/d
Bsp.: x2 + y2 = 1 Einheitskreis(x/d)2 + (y/c)2 = 1 Ellipse mit Halbachse d in x- und c in y-Richtung

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 4
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Grundbegriffe
Kreis und Kugel Kreisumfang 2πR= πD (Radius, Durchmesser)Kreisfläche πR2
Kugelfläche 4πR2
Kugelvolumen 43
πR3
Parabel allgemeine Parabelgleichung: y = ax2 + bx + c
Nullstellen („Mitternachtsformel“): 2
1/ 24
2b b acx
a− ± −=
VektorenSkalarprodukt
2 2 2 ˆ( ) : 1
: cos
: (0 )
x x xy y y
z z z
x y z
x x y y z z
a a bBezeichnung a a Addition a b a b
a a b
Betrag Länge a a a a a Einheitsvektor a
Skalarprodukt a b a b a b a b ab
Winkel zwischen a und b
θ
θ θ π
+ = + = + +
= = + + =
⋅ = + + = ⋅
≤ ≤
Vektorprodukt :
sin
, ,
y z z y
z x x zx y y x
a b a bVektorprodukt c a b a b a b
a b a b
Eigenschaften a b ab
a b c bilden Rechtssystem
c steht senkrecht auf a und b
Vorsicht a b b a
θ
− = × = − −
× = ⋅
× = − ×
Binomische FormelBinominialkoeffizient
( ) ( )( )
0
1
0 1
!: :!( )!
" "0 1
1 1 12 1 2 13 1 3 3 14 1 4 6 4 1
!: ( 1) ... 2 1: ( )
nn n k k
k
n n
k k
nbinomischer Satz a b a bk
nnBinominialkoeffizient oderk k n kZeile n Spalte k im Pascalschen Dreieckn
Fakultät n n n n k k
−
=
−
= =
+ =
=−
=
= ⋅ − ⋅ ⋅ ⋅ = − =
∑
∏ ∏

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 5
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Differenziation
Ableitungen derwichtigsten
elementarenFunktionen
−
−
−−
⋅
−
⋅
+
+
−
−
⋅
2
2
2
2
2
2
2
2
1
( ) '( )
1arcsin1
1arccos1
1ar
sin coscos sin
1tancos
e eln1ln
1logln
ctan1
sinh coshcosh sinh
1tanhcosh
1arsinh1
1arcosh1
1artanh1
x x
x x
r r
a
x r x r reell
x xx x
xx
a a a
x
f x f x
xx
xx
xx
x xx x
xx
xx
x
x
x
x
xa
x
x
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 6
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Differenziation
Differenziations-regeln
( )
( )
( )
2
, : , :
' '
' '
' '
( ( ) '( ( )) '( )
f g Funktionen von x a b KonstantedLinearität af bg af bgdxdProduktregel f g f g fgdxd f f g fgQuotientenregeldx
g x
Nachdiffere
g gdKettenreg
nziere
el f g x f g xd
nx
+ = +
⋅ = +
−=
= ⋅
Ableitung derUmkehrfunktion ( ) ( )1 1
11 1' '( ) ( ( ))
'( )'( ( ))f x oder f f x
f xf f x− −
−= =
Höhere Funktionen
Logarithmus
0
logln ln 1
1 2,7 1828 1828
log ln
..!
ln lnlg 10 lg10 1 lgln10 2,30
log(1) 0log( ) log log
log log log
log lo
l
g
a
k
b
Logarithmus mit beliebiger Basisnatürlicher Logarithmus e
e Euler Zahlk
x xer Logarithmus x
ab a ba a bba b a
x x
∞
=
=
= = −
− = = =
== +
=
= −
=
⋅
∑
lnoglna
xea
=
Exponentialfunktion
( ) ( )
( ) ( )
1ln . .
' 'ln
yy
x
x y x y
xx y
y
yx xy
x x x
x
x
x
e x Exponentialfunkt Umkehrfunkt des Logarithmus
a a a
a aa
a a
a a
a
a e e
a
−
+
−
= =
⋅ =
=
=
= ⋅ =
≠ =

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 7
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Höhere Funktionen
LogarithmischeAuftragungen
Funktionstyp Auftragung Steigung Punkt
( ) bxy x C a= ⋅ y log. x lin.
2
1
2 1
loglog a
a
yy yb
x x x∆= =
∆ −C=y(0)
( ) by x C x= ⋅ y log. x log.
2
1
2
1
lglglg lg
yy yb xx
x
∆= =∆
C=y(1)
Hauptäste der Winkelfunktionen (eineindeutige Bereiche):Definitionsbereich Wertebereich
sin -π/2 .. π/2 -1 .. 1 arcsincos 0 .. π 1 .. -1 arccostan -π/2 .. π/2 -∞ .. ∞ arctan
InverseWinkelfunktionen(Arcusfunktionen)
Wertebereich Definitionsbereich
HyperbolischeFunktionen
−
−
−
−
−=
+=
−= =+
− =2 2
e esinh2
e ecosh2
sinh e etanhcosh e e
cosh sinh 1
x x
x x
x x
x x
x
x
xxx
x x
Inversehyperbolische
Funktionen(Areafunktionen)
( )( )
= + +
= + − ≥
+= <−
2
2
arsinh ln 1
arcosh ln 1 1
1 1artanh ln 12 1
x x x
x x x x
xx xx
3 2 1 0 1 2 35
4
3
2
1
0
1
2
3
4
55
5−
sinh x( )
cosh x( )
ex
2
33− x5 4 3 2 1 0 1 2 3 4 5
2
1
0
1
22
2−
tanh x( )
55− x

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 8
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Taylorentwicklungen
Taylorreihe( )
1
( ) ( ) '( )
( )( ) ( )!
knk
k
lineare Näherung f x h f x f x h
f xNäherung n ten Grades f x h f x hk
Taylorreihe n=
+ ≅ + ⋅
− + ≅ + ⋅
→ ∞
∑
alternative Schreibweise (Entwicklungszentrum sei jetzt nicht mehr xsondern b, Berechnungsstelle sei jetzt nicht mehr x+h sondern x):
( )
0
( )( ) ( )!
kk
k
f bf x x bk
∞
== ⋅ −∑
Die wichtigstenTaylorreihen
( ) ( )
( ) ( )
( ) ( )
02 1
0
2
0
1
1
0
!
sin 12 1 !
cos 12 !
ln 1 1 1
1 11
nx
nn
n
n
nn
n
nn
n
n
n
xe xn
xx xn
xx xn
xx xn
x xx
geometrische Reihe
∞
=+∞
=
∞
=
∞−
=∞
=
= < ∞
= − < ∞+
= − < ∞
+ = − <
= <−
∑
∑
∑
∑
∑
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 9
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integralrechnung
Hauptsatz derDifferenzial- undIntegralrechnung
Hauptsatz der Analysis: ( ) ( )x
a
d f t dt f xdx
=∫In Worten: Ableitung des bestimmten Integrals nach der oberen Grenze =
Integrand, genommen an der oberen GrenzeIntegration ist die Umkehrung der Differenziation
Stammfunktion Damit kann man bestimmte Integrale so bestimmen:F(x) heißt „Stammfunktion“ von f(x), wenn F‘ = fF ist bis auf eine „Integrationskonstante“ C eindeutig
[ ]( ) ( ) ( ) ( ) ( )b
b baa
a
f x dx F b F a F x F x= − = =∫Um eine Stammfunktion F vom Integrand f zu erhalten, müssen dieDifferenziertabellen nur von rechts nach links gelesen werden. Allerdingslässt sich analytisch (also mit Standardfunktionen) praktisch jede Funktiondifferenzieren, jedoch nicht notwendigerweise integrieren. Differenzierenist Routine, Integrieren ist Kunst!
UnbestimmtesIntegral
anderer Ausdruck für Stammfunktion, bedeutet genau dasselbe. AnderesSymbol: ( ) ( )f x dx F x=∫ (beim Integralzeichen werden die Grenzenweggelassen)
Integrationsregeln - Linearität (gilt für bestimmte und unbestimmte Integrale)( ( ) ( )) ( ) ( )a f x b g x dx a f x dx b g x dx⋅ ± ⋅ = ⋅ ± ⋅∫ ∫ ∫
- Vertauschen der Grenzen
( ) ( )b a
a b
f x dx f x dx= −∫ ∫- Zwischenschieben einer Grenze
( ) ( ) ( )b c b
a a c
f x dx f x dx f x dx= +∫ ∫ ∫- Mittelwert einer Funktion f(x) im Bereich a x b≤ ≤
1: ( )b
a
f f x dxb a
=− ∫
- Differenziation nach einer Variablen in der oberen oder unterenGrenze
( )
( )
( ) ( ( )) '( ) ( ( )) '( )h x
g x
d f t dt f h x h x f g x g xdx
= ⋅ − ⋅∫

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 10
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integralrechnung
Integration durchSubstitution
( ( )) '( ) ( ( ))f g x g x dx F g x⋅ =∫Grund: die rechte Seite differenziert nach der Kettenregel ergibt geradeden Integranden.
In der Praxis nutzt man dies so aus:- Ein im Integrand (evtl. wiederholt) vorkommender Ausdruck g(x) wird
durch u ersetzt (u=g(x))
- Die Ableitung nach x '( )du g xdx
= wird als Merkhilfe auseinander
gezogen, was ja eigentlich unkorrekt ist, da dudx
das Symbol für
Ableitung und keinen Bruch darstellt: du = g‘(x)dx- Mit dieser Beziehung wird dx in du umgewandelt, mit der Substitution
u=g(x) müssen außerdem alle x aus dem Integranden verschwinden(notfalls mit Hilfe der Umkehrfunktion x=g-1(u))
- Letztendlich entsteht ein neues Integral mit Integrationsvariable u. DieSubstitution lohnt natürlich nur, wenn der neue Integrand einfacher alsder alte ist.
2
22
2
: ( !)2
2 2 2
22 2
ux
u u xx
eBsp e dx du bleibt unlösbaru
e e ee xdx du
du duu x du xdx dxx u
−
−−
−
− −
=
= = − = −
= = = =
∫ ∫
∫ ∫
Mitsubstitution der Grenzen bei bestimmten Integralen:( )
( )( )
( )
( ( )) '( ) ( ) ( )g bb
u g bu g a
a g a
f g x g x dx f u du F u ==⋅ = =∫ ∫
Partielle Integrationoder
Produktintegration [ ]
' '
' 'b b
ba
a a
u v dx u v u v dx
u v dx u v u v dx
⋅ = ⋅ − ⋅
⋅ = ⋅ − ⋅
∫ ∫
∫ ∫

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 11
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Partialbrüche
Nullstellen vonPolynomen
- Polynome vom Grad n haben genau n Nullstellen 1 ... nx x . Diese sindeventuell komplex und/oder mehrfach („Hauptsatz der Algebra“)
- „Standardform“ eines Polynoms vom Grad n:1 2
1 2 1 0( ) ...n nnQ x x a x a x a x a−
−= + + + + +(kann durch Ausklammern des Koeffizienten bei xn immer erreichtwerden!)
- Produktdarstellung eines Polynoms in Standardform mit Hilfe der
Nullstellen: 1 21
( ) ( ) ( ) ... ( ) ( )n
n ii
Q x x x x x x x x x=
= − ⋅ − ⋅ ⋅ − = −∏- Nullstellensuche: bis zum Grad 4 gibt es Formeln, ab Grad 5 gibt es
prinzipiell keine Formeln mehr (Abel, 1820)n=2 Mitternachtsformel (1.Sem. Lektion 4)n=3,4 Cardanische Formeln, zu kompliziert für die Anwendung
- Polynomdivision: Ist eine beliebige Nullstelle xi von Q(x) bekannt, solässt sich Q(x) ohne Rest durch (x - xi) teilen. Bsp:
3 2 2
3 2
2
2
2 23 60 : ( 3) 203
233
20 6020 60
0 Rest
x x x x x xx x
x xx x
xx
+ − − + = − −+
− −− −
− −− −
Das resultierende Polynom ist dann im Grad um eins reduziert(„Abspaltung einer Nullstelle“). Seine Nullstellen sind daher einfacherzu bestimmen als die vom ursprünglichen Q(x).
Rationale Funtionen( )( ) ,( )
P xf x P Polynom vom Grad m Q vom Grad nQ x
=
„Echt gebrochen“ m < n, sonst „unecht gebrochen“. Unecht gebrochenerationale Funktionen lassen sich durch Polynomdivision in ein Polynomplus eine echt gebrochene rationale Funktion verwandeln.
Partialbruch-zerlegung (PZ)einfache reelle
Nullstellen
f(x) sei echt gebrochener rational, Nenner besitze Standardform und nreelle einfache Nullstellen:
1 2
( )( ) ... (*)( ) n
P x A B Zf xQ x x x x x x x
= = + + +− − −
Zur Bestimmung der reellen Konstanten A ... Z wird Gleichung (*) mit Q(x)durchmultipliziert. Die entstehende Polynomgleichung wird entwederdurch Koeffizientenvergleich gelöst (lineares Gleichungssystem) oderdurch Einsetzen der Nullstellen für x (schneller, führt direkt auf diegesuchten A ... Z).

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 12
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Partialbrüche
Stammfunktion derPZ (einfache reelle
Nullstellen)
1 2( ) ln ln ... ln nf x dx A x x B x x Z x x= ⋅ − + ⋅ − + + ⋅ −∫(Integration der Partialbruchzerlegung ist einfach)
PZ (mehrfache reelleNullstellen)
Mehrfache reelle Nullstellen, z.B. ( )31( )Q x x x= − :
( ) ( )1 2 3
2 31 1 1
( )( )( )
A A AP xf xQ x x x x x x x
= = + +− − −
Stammfunktion derPZ (mehrfache reelle
Nullstelle) ( ) ( ) ( ) 11 1
11n n
dxx x n x x −=
− − ⋅ −∫
PZ (komplexeNullstellen)
- Komplexe Nullstellen können immer zu einem reellen quadratischenAusdruck zusammengefasst werden, der den Ausgangspunkt für diereelle Partialbruchzerlegung liefert:
2 2 4 0x bx c mit Diskriminante b c+ + − <
- Reeller Partialbruchansatz für komplexe Nullstellen:
( ) ( ) 22
( )( ) ......
P x Bx Cf xx bx cx bx c
+= = ++ ++ + ⋅
- Mehrfache komplexe Nullstellen, z.B.
( ) ( ) ( )1 1 2 2
2 2 22 2
( )( ) ......
P x B x C B x Cf xx bx cx bx c x bx c
+ += = + ++ ++ + ⋅ + +
Die Konstanten 1 2 1 1, ,..., , ,..., , ,...A A B C B C können wieder entwederdurch Koeffizientenvergleich oder durch Einsetzen einfacher Zahlen für x(0, ±1, ±2, reelle Nullstellen) bestimmt werden.
Stammfunktion derPZ (einfache
komplexe Nullstelle)
22
2
2 2ln arctan2
: 4
Bx C B C Bb x bdx x bx cx bx c
mit c b
+ − += ⋅ + + + ⋅∆ ∆+ +
∆ = −
∫

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 13
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integraltafeln
Grundintegrale+
= −
= ⋅ ≠ −+
=
=
= ⋅ ≠
∫
∫
∫
∫
∫
1
ln (ln 1
1 11
1 l
)
1 wobei
n
e e
>0, 1ln
n n
x x
x x
x dx x x
a
x dx x nn
dx xx
dx a a
x
a
d
a=
= −
−
=
∫
∫
∫
sin cos
cos sin
tan ln cosx d
x dx x
x dx x
x x
RationaleFunktionen
=+
<+ = = − − >
∫
∫
2 2
2 2
1 1 arctan
1 artanh für 1 1 ln
2 1 artanh für
xdxa x a a
x x aa aa xdx
a x a a x a x aa x
Wurzelfunktionen ( )( )
( )
+ = + + + +
= + +
− = − − + −
− = − + > <
∫
∫
∫
2 2 2 2 2 2 2
2 2 2
2 2 2 2 2 2 2
2 2 2 2 2
1 ln2
1 arsinh2
1 ln2
1 arcsin wobei 0, 2
x a dx x x a a x x a
xx a x aa
x a dx x x a a x x a
xa x dx x a x a a x aa
( )2 2
2 2
2 2
2 2
2 2
1 ln arsinh
1 ln arcosh
1 arcsin
xdx x x aaa x
xdx x x aax a
xdxaa x
= + + =+
= + − = −
=−
∫
∫
∫

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 14
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integraltafeln
Winkelfunktionen 2
2
2
2
1 1sin tan
1 tancos
cos 1sin sin
sin 1cos cos
dxx x
dx xx
x dxx x
x dxx x
= −
=
= −
=
∫
∫
∫
∫
− +−
+ −−
⋅ =
⋅ −− + ⋅
+ +⋅ =
⋅ −+ ⋅
+ +
∫
∫∫
∫
2
1 12
1 12
sinsin cos
2
sin cos 1sin cos
( )sin cos
sin cos 1sin cos
( )
beide Formeln
m nm n
m n
m nm n
axax ax dx
a
ax ax max ax dx
m n a m nax ax dx
ax ax nax ax dx
m n a m n
≠ −nur für m n
π
− −
− −
− = =
−= + >− −
+ = = +
−= + >− −
∫
∫ ∫
∫
∫ ∫
1 2
1 2
1 1 cosln ln tansin sin 2
1 cos 2 1 wobei 1sin ( 1)sin 1 sin
1 1 sinln ln tancos cos 2 4
1 sin 2 1 wobei 1cos ( 1)cos 1 cos
n n n
n n n
x xdxx x
x ndx dx nx n x n x
x xdxx x
x ndx dx nx n x n x
−−
−−
= −
⋅ −= − + − >
= +
⋅ −= + − >
∫
∫ ∫
∫
∫ ∫
2
12
2 2
2
12
2 2
sin cossin
cos sin ( 1)sin sin 0
cos sincos
sin cos ( 1)cos cos 0
n nn n
n nn n
ax x axx ax dx
a a
x ax n x ax n nx ax dx x ax dx n
a a a
ax x axx ax dx
a a
x ax n x ax n nx ax dx x ax dx n
a a a

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 15
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integraltafeln
Winkelfunktionen(Fortsetzung)
−−
−−
−−
⋅ −= − + >
⋅ −= + >
= − >−
∫ ∫
∫ ∫
∫ ∫
12
12
12
sin cos 1sin sin wobei 1
cos sin 1cos cos wobei 1
tantan tan wobei 1( 1)
nn n
nn n
nn n
ax ax nax dx ax dx nna n
ax ax nax dx ax dx nna n
axax dx ax dx nn a
Arcus- undAreafunktionen
( )
2 2
2 2
2 2
arcsin arcsin
arccos arccos
arctan arctan ln2
x xdx x a xa a
x xdx x a xa a
x x adx x x aa a
= + −
= − −
= − +
∫
∫
∫2 2
2 2
2 2
arsinh arsinh
arcosh arcosh
artanh artanh ln2
x xdx x a xa a
x xdx x x aa a
x x adx x a xa a
= − +
= − −
= − −
∫
∫
∫
Exponential-funktionen undLogarithmen
( )
( )
( )
−
+
= −+
= ++
= −
= + − ≠ −+
∫
∫
∫ ∫
∫
2 2
2 2
1
1
2
ee sin sin cos
ee cos cos sin
ee e
ln ( 1)ln 1 wobei 1( 1)
axax
axax
n axn ax n ax
nn
bx dx a bx b bxa b
bx dx a bx b bxa b
x nx dx x dxa a
xx x dx n x nn

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 16
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Integraltafeln
HyperbolischeFunktionen
sinh cosh
cosh sinh
tanh ln(cosh )
x dx x
x dx x
x dx x
=
=
=
∫
∫
∫2
2
2
2
1 1sinh tanh
1 tanhcosh
cosh 1sinh sinh
sinh 1cosh cosh
dxx x
dx xx
x dxx x
x dxx x
= −
=
= −
= −
∫
∫
∫
∫
( )
=
=
∫
∫
1 ln tanhsinh 2
1 2arctan ecosh
x
xdxx
dxx
Anwendungen der Integralrechnung
Das bestimmte Integral liefert nicht nur die Fläche unter demFunktionsgraphen, sondern es kann für eine Vielzahl vonSummieraufgaben angewandt werden, bei denen viele unterschiedlichkleine Teile zusammengezählt werden müssen:
Bogenlänge Bogenlängenelementchen 2 2 21 ( ')ds dx dy y dx= + = +
Bogenlänge 21 ( ')b
a
s y dx= +∫
OberflächeOberflächenelementchen eines Rotationskörpers mit Drehachse x undKontur y(x): 22 2 1 ( ')dS y ds y y dxπ π= ⋅ ⋅ = ⋅ ⋅ +
Oberfläche 22 1 ( ')b
a
S y y dxπ= ⋅ +∫
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 17
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Anwendungen der Integralrechnung
Volumen einesRotationskörpers
Volumenelementchen (= dünne Scheibe mit Dicke dx, Aufschnittsenkrecht zur x-Achse) eines Rotationskörpers mit Drehachse x undKontur y(x): 2dV y dxπ= ⋅ ⋅
Volumen 2b
a
V y dxπ= ∫
VolumenVolumen einer dünnen Scheibe mit Fläche A(x) und Dicke dx, diesenkrecht zur x-Achse steht: ( )dV A x dx= ⋅
Gesamtvolumen ( )b
a
V A x dx= ∫
MomentGewichtskraftmoment dM (im Uhrzeiger pos.) einer bei x liegendenTeilmasse dm bezüglich eines Drehpunktes mit x-Koordinatex (Erdbeschleunigung g in Richtung –y):
( )dM g x x dm= ⋅ − ⋅Damit lassen sich alle möglichen Flächen- und Linienschwerpunkte durchIntegration berechnen, deren Konturen durch Funktionen y(x) gegebensind. Bezüglich des Schwerpunktes verschwindet das Gewichtskraft-Gesamtmoment.
Arbeit Teilarbeit (=Teilenergie) dW, die bei Verrückung um dx von KraftF geleistet wird:
dW F dx= ⋅ (Skalarprodukt!)
Damit lassen sich alle möglichen Gesamtenergien durch Integrationausrechnen, bei denen sich entweder die Kraft längs des Wegesverändert, oder bei denen komplizierte, gekrümmte Wege ausgeführtwerden, oder bei denen viele unterschiedlich große Teilarbeiten verrichtetwerden müssen.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 18
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Matrizen
Matrix,Matrixmultiplikation
n x m Matrix A: rechteckiges Zahlenschema mit n Zeilen, m Spaltenaik: Element von A , also die Zahl in der i-ten Reihe und k-ten Spalte
Matrixmultiplikation: A(n x m)·B(m x p) = C(n x p) nach dem SchemaZeile · Spalte (Spaltenzahl von A muss gleich sein Zeilenzahl von B!):
{1
4 5 53 2 0 11 2 . 1. .
6
3 42
1
224
m
ik il lkl
i noder c a bx x x k pxx x x x
=
≤ ≤= ⋅ ≤ ≤∑
Vektoren können als einspaltige Matrizen aufgefasst werden. Bei derMultiplikation b⋅A muss also die Spaltenzahl von A mit derKomponentenzahl von b übereinstimmen.
Rechenregeln - Multiplikation Matrix mit Zahl geschieht elementweise- Addition Matrix mit Matrix geschieht elementweise- Multiplikation A·B ist nicht kommutativ: ⋅ ≠ ⋅A B B A . Bei nicht-
quadratischen Matrizen kann eines der beiden Produkte gar nichtgebildet werden
- ( ) ( )⋅ ⋅ = ⋅ ⋅A B C A B C- ( )⋅ + = ⋅ + ⋅A B C A B A C- ( ) ( ) ( )r r r r⋅ ⋅ = ⋅ ⋅ = ⋅ ⋅ = ⋅ ⋅A B A B A B A B
Definitionen - transponierte Matrix AT: Zeilen und Spalten werden vertauscht.- quadratische n x n Matrix: Zeilenzahl = Spaltenzahl- symmetrische Matrix: AT = A- inverse Matrix: A-1: A-1·A = A·A-1= 1 (Einheitsmatrix). Die Inverse
ist nur bei quadratischen Matrizen definiert und spielt bei der Lösunglinearer Gleichungssysteme eine entscheidende Rolle. DieBerechnung ist aufwendig.
Determinante det Aeiner quadratischen
Matrix (= Zahl)
- 2x2 Matrix: 11 22 12 21det : a a a a= −A- 3x3 Matrix: Sarrusregel- nxn Matrix: Rückführung auf (n-1)x(n-1)-Unterdeterminanten
(„Laplacescher Entwicklungssatz“), sehr rechenaufwendig- Mit Determinanten und Unterdeterminanten (sog. Adjunkten) kann die
Inverse A-1 berechnet werden. Das Verfahren ist jedoch vomRechenaufwand her inakzeptabel.
- Ist det A = 0, so existiert die Inverse A-1 nicht. Die Zeilen oderSpalten von A sind dann nicht linear unabhängig.
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 19
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Lineare Gleichungssysteme
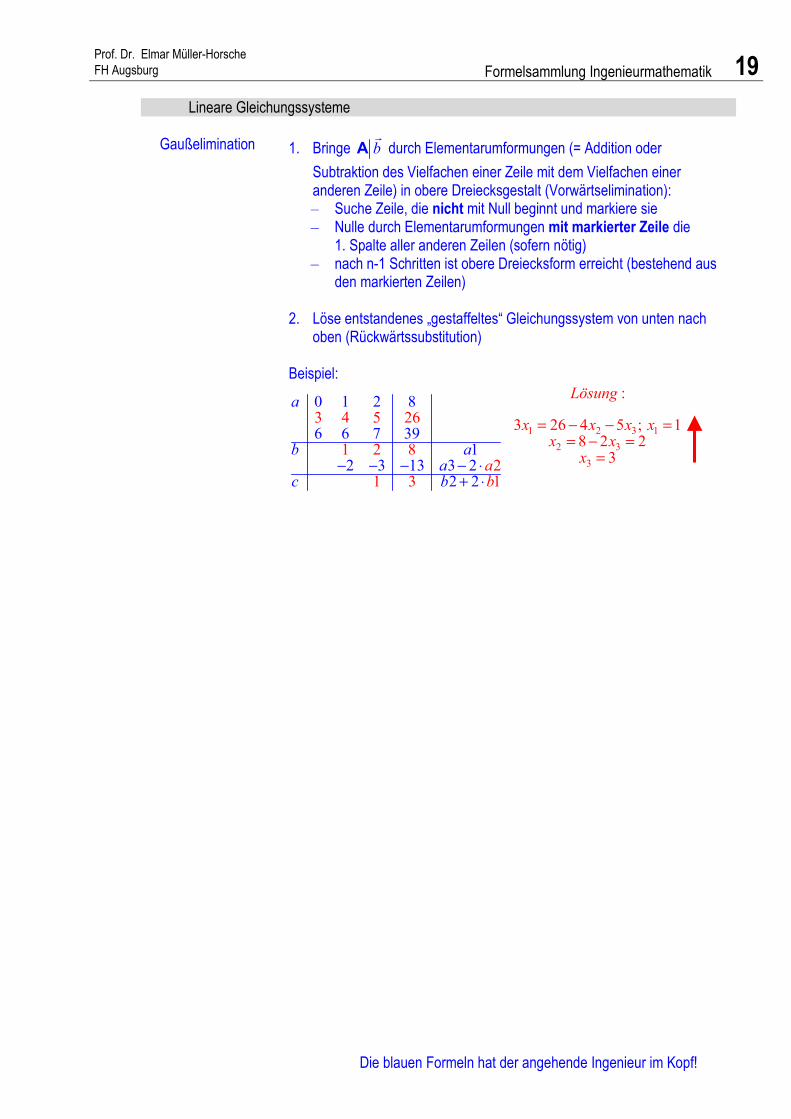
Gaußelimination 1. Bringe A b durch Elementarumformungen (= Addition oderSubtraktion des Vielfachen einer Zeile mit dem Vielfachen eineranderen Zeile) in obere Dreiecksgestalt (Vorwärtselimination):– Suche Zeile, die nicht mit Null beginnt und markiere sie– Nulle durch Elementarumformungen mit markierter Zeile die
1. Spalte aller anderen Zeilen (sofern nötig)– nach n-1 Schritten ist obere Dreiecksform erreicht (bestehend aus
den markierten Zeilen)
2. Löse entstandenes „gestaffeltes“ Gleichungssystem von unten nachoben (Rückwärtssubstitution)
Beispiel:
1 2 3 12 3
3
0 1 2 8
6 6 7 391
2 3 13
:3 4 5 26 3 26 4 5 ; 1
8 2 21 2 8 321 3
3 22 2 1
a
b aa
c b
Lösung
x x x xx x
xab
− − − − ⋅+ ⋅
= − − == − =
=

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 20
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Lineare Gleichungssysteme
Rang einer Matrix,freie Parameter,
allgemeinehomogene Lösung,
spezielleinhomogene Lösung,
allgemeineinhomogene Lösung
Bei der Gaußelimination eines allgemeinen Gleichungssystems( ) ( ) ( )A m n n mx b× ⋅ = (Hochindex = Dimension n,m beliebig)
kann es vorkommen, dass in einem Schritt alle Zeilen mit Null beginnen.Es ergibt sich dann eine unterbrochene Diagonalreihe, einigeTreppenstufen werden breiter (rote Blöcke im unteren Bild). Außerdemkönnen mehr oder weniger Zeilen als Unbekannte vorkommen. DasResultat der Gaußelimination wird in jedem Fall so aussehen:
Das Gleichungssystem ist nur dann widerspruchsfrei, wenn der grüneBlock lediglich aus Nullen besteht. Die Lösung kann dann in 2 Schrittenerfolgen:
allg. homogene Lösung spez. inhomogene Lsg.
- Allgemeine Lösung der „homogenen Gleichung“ 0A Ox⋅ = . Dazuwerden die roten Blöcke mit Vorzeichenumkehr nach rechts gestellt,der schwarze Block wird gestrichen und es erfolgt wie gewohnt dieRückwärtssubstitution. Die sich ergebende „allgemeine homogeneLösung“ Ox ist n-komponentig und enthält die freien Parameter:
1 1 2 2 ...O n r n rx c c cλ λ λ − −= ⋅ + ⋅ + + ⋅
- Eine spezielle Lösung der inhomogenen Gleichung A Sx b⋅ = . Dazuwerden alle λs Null gesetzt (die roten Blöcke werden gestrichen), aufder rechten Seite wird nur der Schwarze Block berücksichtigt. Sx istwie Ox n-komponentig (die zu Null gesetzten freien Parameter λwerden in die Lösung hinein geschrieben, z.B. an die Stelle x3 und x4).
- Die allgemeine Lösung der ursprünglichen inhomogenen Gleichung istdann einfach: O Sx x x= +
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 21
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Lineare Gleichungssysteme
Rang einer MatrixBeispiel
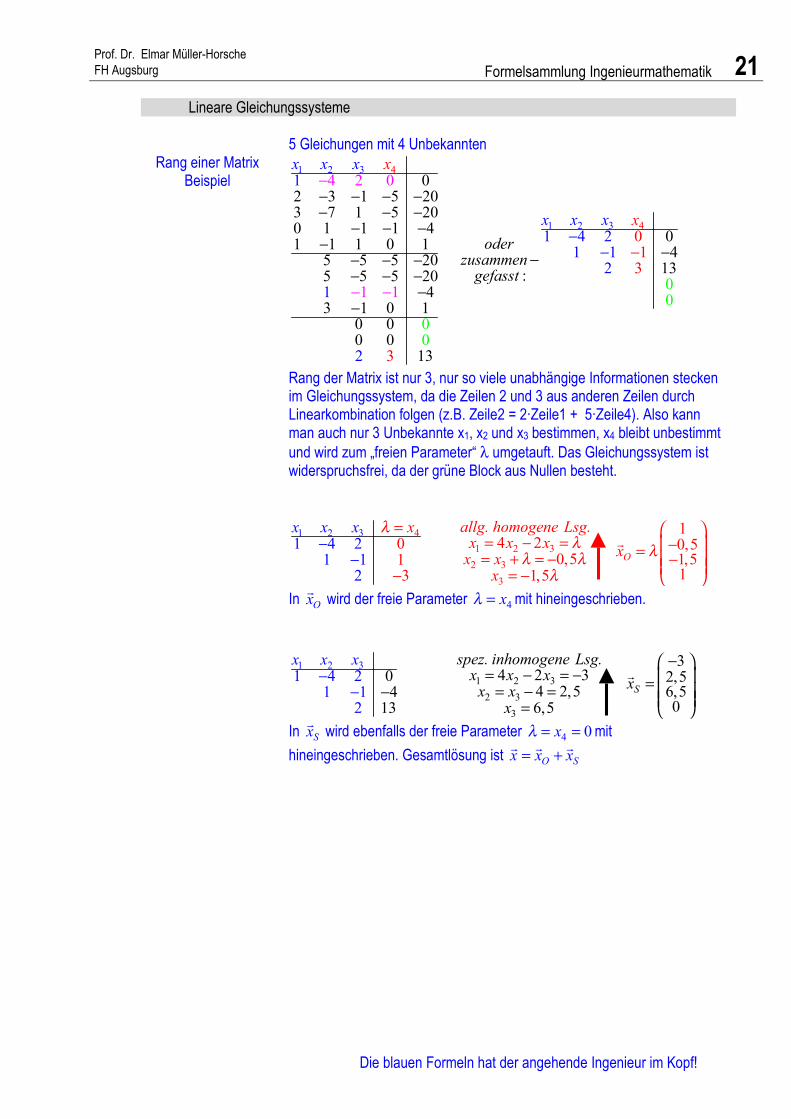
5 Gleichungen mit 4 Unbekannten1 2 3
1 2 43
40
2 3 1 5 203 7 1 5 200 1 1 1 4 01 1 1 0 1 45 5 5 20 13:5 5 5 20
43 1 0 1
0 00 0
1
1 4 21 1
21
2
01
00
1
3
4 2 0
1 1
3
003
oderzusammen
gefa
x
x
ss
x x
x x x
t
x−
− −
−−
− − − −− − −
− − −− −−− −− −
− − −−
−
Rang der Matrix ist nur 3, nur so viele unabhängige Informationen steckenim Gleichungssystem, da die Zeilen 2 und 3 aus anderen Zeilen durchLinearkombination folgen (z.B. Zeile2 = 2·Zeile1 + 5·Zeile4). Also kannman auch nur 3 Unbekannte x1, x2 und x3 bestimmen, x4 bleibt unbestimmtund wird zum „freien Parameter“ λ umgetauft. Das Gleichungssystem istwiderspruchsfrei, da der grüne Block aus Nullen besteht.
41 2 3
1 3
2 33
2 14 20 0,5
0,5 1,1 4 2
1 5113 1,5
12
O
allg. homogene Lsg.xx x x x
x x
x x
x
x
λλ λλ λ
λ
= =− − = −== + = − − − = −
−
In Ox wird der freie Parameter 4xλ = mit hineingeschrieben.
1 2 31 2 3
2 33
34 2 30 2,5
4 2,5 6,54013 6
1 4 21 1
,52S
spez. inhomogene Lsg.x x x xx x
x x
x
x − = − = − == − =− =
−−
In Sx wird ebenfalls der freie Parameter 4 0xλ = = mithineingeschrieben. Gesamtlösung ist O Sx x x= +

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 22
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Berechnung der inversen Matrix nach Gauß-Jordan
Gauß-Jordan-Verfahren zur
Berechnung von A-1
1. Schreibe rechts neben A die entsprechende Einheitsmatrix 12. Eliminiere A 1vorwärts, mache jedes Diagonalelement auf der linken
Seite zu Eins, wende alle Elementarumformungen auch auf die rechteSeite an
3. Eliminiere rückwärts, bis links die Einheitsmatrix 1 erscheint. Dierechte Seite ist dann das Ergebnis A-1
Beispiel:
2 2 1 13 3 2 1
2 5 2 1 0 2 23 7 3 0 1 3 3
1/( 2)0,5 0 11 0 3 2
1
1 0 1 7 5
,5 1 2 32 22,5
1 2 0 1 9 6 31
11 0 0 1 5 4 1
2 3 1
11
1 2,5 1 0,5 0
1
2
1
12
a
b aa
c bb
dd
de
aa
cc
e
f
cae
− − − − ⋅− − − − ⋅
−− + ⋅
⋅−
−−
−
⋅− − ⋅
− ⋅−
−
Ergebnis und Kontrolle:1 0 0 1 5 4
1 0 1 7 51 0
1111 1 2 3 12 2 2 1 13 3 3
3 2
2 1
fedaaa
− −−
−
Im oberen roten Block sind die Ergebniszeilen der Rückwärtseliminationnur so sortiert, dass links die Einheitsmatrix entsteht. Im unteren Blockwurde die Ausgangsmatrix links hingeschrieben. Wenn man den Blocklinks unten mit dem rechten oberen nach dem Falk-Schema multipliziertmuss unten rechts die Einheitsmatrix erscheinen.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 23
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Komplexe Zahlen
kartesische undpolare Darstellung
( )
Re Im
2 2
2
,
( , )
: :
, arg( ) : tan
cos sin
1
al aginärteil teil
j
komplexe Einheitkomplexe Zahl z x j y x y reell
Punkt x y in der komplexen Ebene
Betrag z x y ryPhase Argument z mitx
Polardarstellung z r j
Euler Formel r e
konj
j
ϕ
ϕ ϕ
ϕ ϕ
− −
= + ⋅
=
= + =
= =
= +
− = ⋅
= −
* : jugiert komplex z x jy r e ϕ−= − = ⋅
Rechenregeln
( )
( )
* *
* 2
( ) ( )
,
( )
j j
j
j
z x jy re w u jv seAddition z w x u j y v
Vektoraddition
Multiplikation z w rs eBeträge multiplizieren Phasen addieren
z rDivision polar ew sz z w z wDivision kartesisch Nenner reellw w w s
ϕ θ
ϕ θ
ϕ θ
+
−
= + = = + =+ = + + +
⋅ = ⋅
= ⋅
⋅ ⋅= =⋅
2
. !
0 .. 1j k
n nn n
pos reell n Lösungen
komplexe Wurzel z r e k nϕ π + ⋅ = ⋅ = −
komplexeSchwingungen
{{
.
" "
ˆ( )
Re ( )( ) Im ( )
j t j j t
komplexer lässt pos AnfangsAnfangs Zeiger mit Amplitude phasewert rotierenZeiger
komplexe Schwingung s t b e x e e
s treelle Schwingung x t s tHorizontaleZeigerprojektion auf Vertikale
ω ϕ ω
ω
−−
= ⋅ = ⋅ ⋅
=
Komplexe Schwingungen lassen sich viel leichter addieren unddifferenzieren als reelle Schwingungen. Das ist der Hauptgrund für dieEinführung der komplexen Zahlen in der Ingenieurmathematik. Derkomplexe Anfangswert b beinhaltet Information über Amplitude x undPhasenlage ϕ.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 24
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Komplexe Schwingungen
komplexerFrequenzgang
( ) ( )( )( )
arg( )
komplexer Frequenzgang F s t F r tr t komplexe Anregungs t komplexe Schwingung
Amplitudenfrequenzgang FPhasenfrequenzgang F
= ⋅
==
Eingeschwungene angeregte Schwingungen schwingen genau mitAnregungsfrequenz ω. Damit kann man Anregung und sich ergebendeSchwingung durch unterschiedlich lange und unterschiedlich orientierteZeiger darstellen, die aber synchron mit gleicher Drehzahl ω drehen! VomAnregungszeiger kommt man zum Schwingungszeiger durch komplexeMultiplikation mit dem komplexen Frequenzgang F. Er beinhaltet sowohldie Zeigerverlängerung oder –verkürzung (= Amplitudenfrequenzgang) alsauch die Zeigerdrehung (= Phasenfrequenzgang). F hängt von derSystemdämpfung und der Anregungsfrequenz ab, nicht aber von der Zeit.F kann sehr einfach algebraisch bestimmt werden.
fester Dämpfer,Anregung der Feder
0
0
0
( )( / )
( / )( ) (1/ )
( , 1/ )
(1/ )2
m schwingende Masse kgD Federkonstante N mk Dämpfungskoeffizient Ns m
Anregungs kreis frequenz s
D Eigenfrequenz ungedämpft sm
k Abklingkoeffizient sm
Frequenzverhältnis
Dämfungsgrad
ω
ω
δ
ωηωδθ
ω
=
=
=
=
21
1 2F
jη θη=
− + ⋅
GleichzeitigeAnregung von
Dämpfer und Feder2
1 21 2
jFjθη
η θη+ ⋅=
− + ⋅
feste Feder,Anregung des
Dämpfers2
21 2
jFj
θηη θη
⋅=− + ⋅
Unwuchtanregung2
21 2F
jη
η θη=
− + ⋅
ˆ ˆ ˆ :
ˆ :
x F a a AnregungsamplitudeMa M Unwuchtmasse imm
Abstand von Drehachse
ε
ε
= ⋅
= ⋅

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 25
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Fourierreihen
Satz von Fourier2π – periodische Funktionen lassen sich wie folgt durch sin- und cos-Wellen darstellen („Fourierreihe“):
0
1 1
2
( ) ( 2 )
2cos sin
( cos sin )n nn
f x f x na DC Anteil
a x b x Grundwelle
a nx b nx Oberwellen
π
∞
=
= ± ⋅ =
+ −
+ + +
+ +∑
Die Fourierkoeffizienten an und bn lassen sich durch kompliziertereIntegrale bestimmen:
} { } {2
0
1 cos 0,1,2..( ) 1,2,..sinnn
a nxf x dx nb nx
π
π= =∫
Bei T-periodischen Funktionen ( ) ( )f t n T f t± ⋅ = wird einfach nur x
durch 22t f t tTπω π= ⋅ = ⋅ ersetzt (f : Frequenz, ω : Kreisfrequenz).
Gesamtamplitudenund Phasen
Anstelle der sin- und cos-Koeffizienten a und b verwendet der Ingenieurhäufiger die Gesamtamplituden A und Phasen ϕ:
2
0
1
2
(
arctan
) cos( )2
n
n n
n n n nn
n
af
b
x
A
A
ba
nx
a
ϕ
ϕ
∞
== + −
= + =
∑
Anwendung in derSchwingungslehre
Aus der Schwingungslehre ist bekannt, wie ein System auf sin- oder cos-förmige Anregungen (= „harmonische Anregungen“) reagiert.Nichtharmonische Anregungen können aber mit der Fourierreihe durchdie Überlagerung (= Aufsummation) einer Vielzahl von harmonischenAnregungen dargestellt werden. Die Reaktionen des System auf Grund-und Oberwellen werden dann einfach ebenfalls aufsummiert und manerhält die Systemreaktion bei nichtharmonischer Anregung.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 26
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Diskrete Fouriertransformation
DiskreteFouriertrans-
formation (DFT)
Die diskrete Fouriertransformation ist eine numerische Näherung für dieKoeffizienten an und bn der Fourierreihe. Die zur Berechnung notwendigenIntegrale werden einfach mit der Streifenflächenmethode angenähert. anund bn werden dabei zu einem komplexen „Spektralwert“ cnzusammengefasst, wodurch die sin- und cos-Funktionen durch
jnxe± ersetzt werden können, was die Rechnung stark vereinfacht.
21
0
0 2
*2 2
2 ,2: ; : ; : ( ); , 0,1.. 1
21 ; : ( )
, ( )
1.. 2 1
n nn k k k
N jn k Nn k
k
N
N m N m
f sei periodisch N äquidistante Stützstellena j bc x k y f x k n N
N
c w y w e SchnörkelfaktorN
c c sind reell DC Anteil und Oberwellenrest
c c m N
π
ππ
− − ⋅⋅
=
+ −
−− ⋅= = ⋅ = = −
= ⋅ ⋅ =
−
= = −
∑
2( )
2arg 1.. 2 1
N
n n
n n
ab c keine weiteren Informationen
Gesamtamplituden A cPhasen c n Nϕ
== − = −
IDFTInverse Diskrete Fouriertranformation und Trigonometrische Interpolation:
( ) ( )2 11
0 20 1
cos cos 2NN
n kk n n k n N k
n ny w c c A n x c N xϕ
−−⋅
= == ⋅ = + ⋅ ⋅ − + ⋅ ⋅∑ ∑

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 27
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Schnelle Fouriertransformationen
SchnelleFouriertrans-
formation (FFT)
Die schnelle Fouriertransformation ist ein geschicktes Rechenschema zurDurchführung der DFT mit möglichst wenig Rechenoperationen. Sie ist deram häufigsten eingesetzte mathematische Algorithmus in unsererheutigen Zeit und spielt bei so bekannten Anwendungen wie Musik-komprimierung in mp3 und Bilddkomprimierung in jpg eine wichtige Rolle.
Parametrische ebene Kurven
DefinitionBei parametrische Kurven werden die Punktkoordinaten als Funktion einerHilfsgröße (= Parameter) dargestellt: ( )( )( ) ( )
x tr t y t= .
Parameter können z.B. sein: Zeit t, Abrollwinkel ϕ, zurückgelegteWegstrecke s usw.
Steigung: dy ydx x
= (Punkt = Ableitung nach dem Parameter, auch wenn
dieser nicht die Zeit t ist!)
Bogenlänge: 2 2b
a
s x y dt= +∫
- 45°
-135°
- 45°
-135°
- 22,5°
- 45°
- 67,5°
-112,5°
- 135°
-157,5°
w(16) = e - j·22,5°w(8) = e - j·45°w(4) = e - j·90°=-j
0000 y0
1000 y8
0100 y4
1100 y12
0010 y2
1010 y10
0110 y6
1110 y14
0001 y1
1001 y9
0101 y5
1101 y13
0011 y3
1011 y11
0111 y7
1111 y15
16·c0
16·c1
16·c2
16·c3
16·c4
16·c5
16·c6
16·c7
16·c8
16·c9
16·c10
16·c11
16·c12
16·c13
16·c14
16·c15

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 28
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Zylinder- und Kugelkoordinaten
Zylinderkoordinaten r, ϕ, z :
2 2cos
sin tan
:
r
z
Geschwindigkeitenv r radialv r tangentialv z
x r r x yyy r
axi
z z
al
x
ϕ
ϕ
ϕ ϕ
ϕ== ⋅
=
= ⋅ = +
= ⋅ =
=
Kugelkoordinaten r, ϕ, θ :
2 2 2sin cos
sin sin tan
cos cos
:
sin
r
x r r x y zyy rxzz rr
Geschwindigkeitenv r radialv r tangential Südv r tangential Ost
θ
ϕ
θ ϕ
θ ϕ ϕ
θ θ
θθ ϕ
= ⋅ = + +
= ⋅ =
= ⋅ =
=
= ⋅= ⋅
Tangente, Normale, Krümmung
Verallgemeinerte Geschwindigkeit (t sei irgendein Parameter, nicht
notwendigerweise die Zeit): ( )
( ) ( ) ( )( )
x tv t r t y t
z t
= =
Tangenteneinheitsvektor: ˆ vTv
= (Geschwindigkeit immer tangential)
Hauptnormale:ˆˆˆ
TNT
= (zeigt zum Krümmungsmittelpunkt)
Krümmungsradius ρ, Krümmung κ : 1:T
vκ
ρ==
Krümmung einer ebenen Kurve, dargestellt durch Funktion y = f(x):
( )322
'': '1
''
f ff
κ = ≅+
(Näherung für flache Kurven f ‘<<1)
κ ist hier Vorzeichen behaftet: pos., wenn nach oben gekrümmt.
Tangential- undNormal-
beschleunigungBeschleunigung
2
,
ˆ ˆ( ) :tangential
normal zentripetal
va t v v T Nρ
= = ⋅ + ⋅
x
y
z
z
rϕ
P
x
y
z
θ rϕ
P

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 29
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Partielle Ableitung
Partielles Differenzieren ( , )f x yx
∂∂
(eigenes Symbol! Kurzform: xf )
bedeutet Berechnung der Steigung in x-Richtung der Schnittlinie y =konst. Man differenziert einfach nach x, behandelt y wie eine Konstante.Bsp.:
3 2 4 4
2 2 3
3 4 3
( , )
3 4 ( 1,1) 1
2 4 ( 1,1) 3
x x
y y
f x y x y x y yf f x y x y fxf f x y x y fy
= + +∂ = = + − = −∂∂ = = + + − =∂
Tangentialebene xf und yf geben die Steigung der Tangentialebene t(x,y) an die Fläche( , )z f x y= in x- und y-Richtung an. Diese wäre im obigen Beispiel:
( , ) ( 1,1) ( 1,1) ( ( 1)) ( 1,1) ( 1)
1 ( 1) 3( 1) 3 3x yt x y f f x f y
x y x y= − + − ⋅ − − + − ⋅ − =
= − + + − = − − +Dies ist dann auch gleich die lineare Näherung einer „mehrdimensionalen“Funktion, hier in der Umgebung des Punktes (-1,1).
KettenregelSämtliche zur Endvariablen führende Wege ergeben einen Term in derKettenregel. Im Beispiel führen 2 Wege von f nach r (über x und y) aber 3Wege nach s (über x, y und z).
f f x f yr x r y rf f x f y f dzs x s y s z ds
∂ ∂ ∂ ∂ ∂= ⋅ + ⋅∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂= ⋅ + ⋅ + ⋅∂ ∂ ∂ ∂ ∂ ∂
Gradient( , )( , ) : ( , )
xy
f x yf x y f x y ∇ =
Die partiellen Ableitungen bilden einfach die Komponenten eines Vektors,der „Gradient“ heißt. Der Gradient gibt die Richtung der steilsten Steigungan. Sein Betrag ist die steilste Steigung. Mit dem Gradienten kann man dieSteigung der Fläche z=f(x,y) an beliebigen Stellen 0 0( , )x y in beliebigeRichtungen der xy-Ebene ausrechnen („Richtungsableitung“). DieRichtung sei durch den Einheitsvektor u gegeben. Die gesuchte Steigungist dann: 0 0 ˆ( , )f x y u∇ ⋅ (Skalarprodukt).
f(x,y,z)
y(r,s)x(r,s) z(s)
sr

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 30
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Partielle Ableitung
Höhere Ableitungen Bezeichnungsweise: ( )2
x xyyf f f f
y x y x∂ ∂ ∂ = = = ∂ ∂ ∂ ∂
Satz von SchwarzDie Reihenfolge bei höheren gemischten Ableitungen ist egal, z.B.:
yx xyf f=
ExtremwerteExtremwerte (horizontale Tangentialebene!) von z = f(x,y) treten nur anden Stellen auf, an denen die ersten partiellen Ableitungen verschwinden:
0x yf f= =
Die Kriterien für die Art der Extremstelle mit Hilfe der 2. Ableitungen sindjetzt komplizierter als bei Funktionen einer Variablen:
( )( )( )( )
2
2
2
2
0 0
0 0
0
0
xx xx yy xy
xx xx yy xy
xx yy xy
xx yy xy
Maximum f und f f f
Minimum f und f f f
Sattel f f f
unklar f f f
< ⋅ − >
> ⋅ − >
⋅ − <
⋅ − =
TaylorreihenFür eine Funktion f(x,y,z) mit 3 Variablen gilt z.B. (Entwicklungspunkt sei(a,b,c), Schrittweiten seien h, k und l ):
02
2 2 2
1( , , ) ( , , )!
( , , ) . . :
2 2 2
( ,
n
n
xx yy zz xy xz yz
f a h b k c l h k l f a b cn x y z
h k l f a b c z B ist dabei eine Abkürzung fürx y z
h f k f l f hk f hl f kl falle Ableitungen ausgewertet an der Stelle a
∞
=
∂ ∂ ∂+ + + = ⋅ + ⋅ + ⋅ ∂ ∂ ∂
∂ ∂ ∂⋅ + ⋅ + ⋅ ∂ ∂ ∂ ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅
∑
, )b c

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 31
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Flächenintegrale
Mehrfachintegrale werden schrittweise von innen nach außen integriert.Es wird immer nur „ganz normal“ mit einer Integrationsvariablen integriert,die weiter außen stehenden Integrationsvariablen werden dabei alskonstant angesehen:
.: ( )
( , ) ( )
( , )
b d b
a c a
äußeres Iinneres Integral A x
b d
a c
f x y dy dx A x dx
dx dy f x y alternative Schreibweise
=
= =
=
∫ ∫ ∫
∫ ∫Ergebnis der inneren Integration ist eine Funktion A(x), die die Fläche imSchnitt x = konstant zwischen der Funktion f und der xy-Ebene im Bereichc<y<d darstellt. A(x)dx ist als Scheibenvolumen zu interpretieren,Scheibendicke ist dx. Alle Scheiben des Aufschnittes werden bei deräußeren Integration zusammengezählt. Das Ergebnis ist damit dasVolumen zwischen der Funktionsfläche z = f(x,y) und der xy-Ebene imrechteckigen Bereich a<x<b und c<y<d.
Die Integrationsreihenfolge darf vertauscht werden. Bei konstantenGrenzen des Integrationsbereiches ist dies unproblematisch. Beiabhängigen Grenzen müssen diese aber beim Vertauschen von innererund äußerer Integration verändert werden!
Obwohl das Ergebnis als Volumen interpretiert werden kann (s.o.), sprichtman beim Doppelintegral von einem Flächenintegral, da dasIntegrationsgebiet ein flächiger Bereich der xy-Ebene ist. dy·dx ist dort dasFlächenelementchen, das gelegentlich auch mit dA abgekürzt wird.
dA inPolarkoordinaten dA r dr dϕ= ⋅ ⋅
FreiformoberflächenDas Freiform-Oberflächenelementchen (Freiformfläche durch z=f(x,y)gegeben) kann folgendermaßen bestimmt werden:
2 2 2 21 1x y x ydS f f dA f f dx dy= + + = + + ⋅Die Integration über einen Bereich der xy-Ebene ergibt dann dieentsprechende Gesamtoberfläche.
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 32
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Flächenintegrale
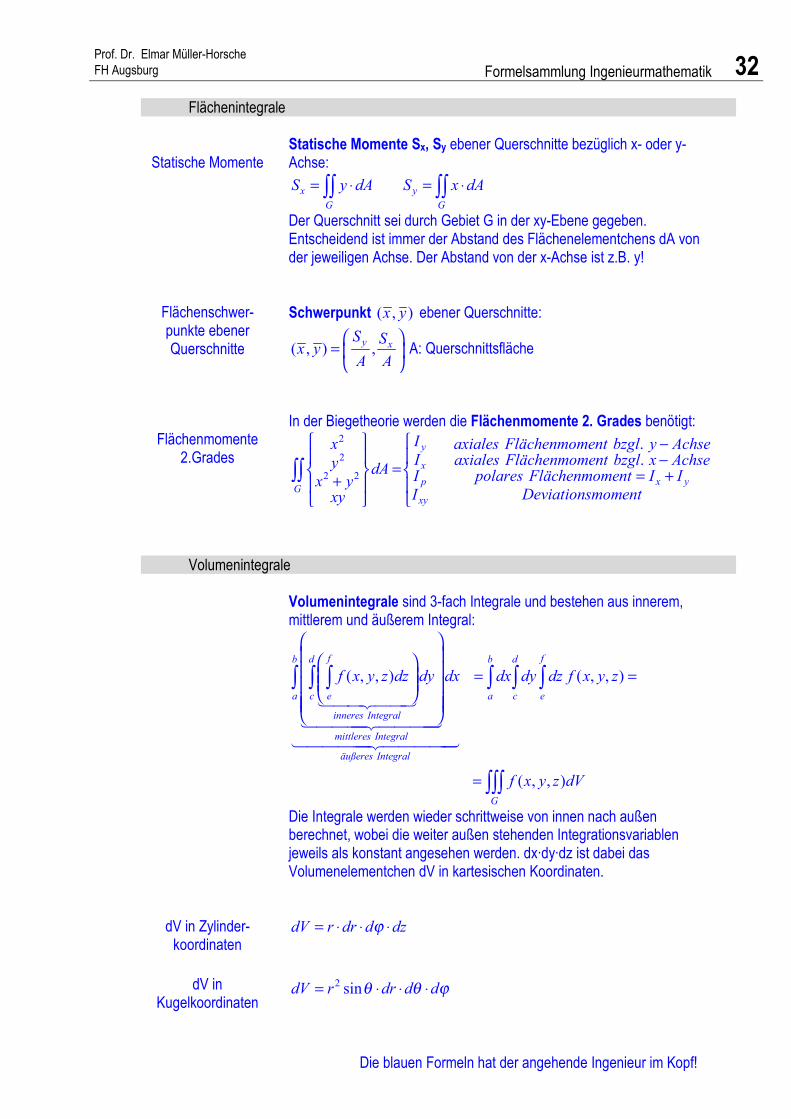
Statische MomenteStatische Momente Sx, Sy ebener Querschnitte bezüglich x- oder y-Achse:
x yG G
S y dA S x dA= ⋅ = ⋅∫∫ ∫∫Der Querschnitt sei durch Gebiet G in der xy-Ebene gegeben.Entscheidend ist immer der Abstand des Flächenelementchens dA vonder jeweiligen Achse. Der Abstand von der x-Achse ist z.B. y!
Flächenschwer-punkte ebenerQuerschnitte
Schwerpunkt ( , )x y ebener Querschnitte:
( , ) ,y xS Sx yA A
=
A: Querschnittsfläche
Flächenmomente2.Grades
In der Biegetheorie werden die Flächenmomente 2. Grades benötigt:2
2
2 2
.
.y
xx yp
Gxy
I axiales Flächenmoment bzgl y AchsexI axiales Flächenmoment bzgl x Achsey dA polares Flächenmoment I IIx y
DeviationsmomentIxy
− −= = ++
∫∫
Volumenintegrale
Volumenintegrale sind 3-fach Integrale und bestehen aus innerem,mittlerem und äußerem Integral:
( , , ) ( , , )
( , , )
f fb d b d
a c e a c e
inneres Integral
mittleres Integral
äußeres Integral
G
f x y z dz dy dx dx dy dz f x y z
f x y z dV
= =
=
∫ ∫ ∫ ∫ ∫ ∫
∫∫∫Die Integrale werden wieder schrittweise von innen nach außenberechnet, wobei die weiter außen stehenden Integrationsvariablenjeweils als konstant angesehen werden. dx·dy·dz ist dabei dasVolumenelementchen dV in kartesischen Koordinaten.
dV in Zylinder-koordinaten
dV r dr d dzϕ= ⋅ ⋅ ⋅
dV inKugelkoordinaten
2 sindV r dr d dθ θ ϕ= ⋅ ⋅ ⋅

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 33
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Volumenintegrale
Massenträgheits-momente
Viele Formeln für Drehbewegungen kann man durch Modifikation derentsprechenden Formeln für linearen Bewegungen erhalten. DieGeschwindigkeit v wird durch die Kreisfrequenz ω ersetzt und die Massem durch das Massenträgheitsmoment J:
( )
( )
2
2
:DrehachseG
G
J Abstand von Drehachse dm
Abstand von Drehachse dVρ
= ⋅ =
= ⋅
∫∫∫
∫∫∫Falls die x-Achse Drehachse ist, gilt also beispielsweise:
( )2 2x
G
J y z dm= + ⋅∫∫∫dm ist dabei das Massenelementchen, das durch ρ·dV oder inkartesischen Koordinaten durch ρ·dx·dy·dz bestimmt werden kann (ρ:Dichte). Das Integrationsgebiet G erstreckt sich über den gesamtenDrehkörper und ist im Allgemeinen durch abhängige Grenzen in einemmöglichst günstigen Koordinatensystem anzugeben. Darin bestehtmeistens die Schwierigkeit bei der konkreten Berechnung!
Laplace-Transformation
DefinitionMit der Laplace-Transformation (LT):
{ }0
( ) ( ) : ( ) pt
Bildfunktion Originalim Bildbereich funktion im
Zeitbereich
F p f t f t e dt∞
−
−
= = ⋅∫L
wird aus der ursprünglichen Zeitfunktion f(t) eine andere Funktion F(p)gebildet. Man spricht von der Bildfunktion, die von der Variablen p im
Bildbereich abhängt. p hat die Dimension 1s
und wird in vielen
Lehrbüchern auch mit s abgekürzt. Um die Verwechslungsgefahr mit derSekunde zu vermeiden, verwenden wir hier aber p.
Der große Vorteil der LT ist folgender: aus komplizierten mathematischenOperationen im Zeitbereich (z.B. Differenzieren) werden einfachealgebraische Operationen im Bildbereich (Multiplikation mit p). Häufigkann man dann schnell die Lösung einer Differenzialgleichung imBildbereich finden und braucht nur noch deren Rücktransformation.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 34
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Laplace-Transformation
die wichtigstenBildfunktionen
Hin- und Rücktransformation geschieht meist mit Hilfe von Tabellen(„Korrespondenztafeln“). Hier die wichtigsten Korrespondenzen:
1
2 2
2 2
( ) ( )
1
1!
1
sin
cos
nn
at
F p f t
Einschaltfunktionp
Impulsfunktionn t
p
ep a
tp
p tp
ω ωω
ωω
+
→←
−
+
+
-1LL
Linearität { }1 2 1 2( ) ( ) ( ) ( )a f t b f t a F p b F p⋅ ± ⋅ = ⋅ ± ⋅L
Differenzieren imZeitbereich
{ }{ } { }2 ( )
( ) ( ) (0)
( ) ( ) (0) (0) ( ) .n
f t p F p f
f t p F p p f f f t usw
= ⋅ −
= ⋅ − ⋅ − =
L
L L
Integrieren imZeitbereich
0
( )( )t F pf d
pτ τ
= ∫L
Verschiebung imZeitbereich
Verschiebung im Zeitbereich um a nach rechts (Vorsicht, die verschobeneFunktion wird im Bereich 0<t<a Null gesetzt!):
{ }( ) ( )paf t a e F p−− = ⋅L
Dämpfungssatz { }( ) ( )ate f t F p a− ⋅ = +L
Ähnlichkeitssatz { } 1( ) pf at Fa a
= L
0
1f
t
0
1/af
t
Fläche = 1
a
0lima→

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 35
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Laplace-Transformation
Faltungssatz{ }1 2 1 2
1 2 1 20
( ) ( )
: ( ) ( ) ( ) : ( ) ( )t
f f F p F p
Faltungsintegral f t f t f t f f t dτ τ τ
⊗ = ⋅
= ⊗ = ⋅ −∫
L
Rücktransformationrationaler
Funktionen
Rationale Funktionen kommen häufig als Lösungen von DGL im Bildraumvor. Sie lassen sich mit der Partialbruchzerlegung, der Linearitätsregel undden Korrespondenztafeln leicht zurück transformieren.
Korrespondenztafeln
( ) ( )F p f t→←-1LL
ElementareFunktionen
1
2 2
2 2
1 ( )
1 ( )!
1
sin
cos
nn
at
t Einschaltfunktionp
t Impulsfunktionn t
p
ep a
tp
p tp
σ
δ
ω ωω
ωω
+
−
+
+
Partialbrüche1
p a−ate
( )1
np a− ( )1
1 !
n att en
− ⋅−
( )2 2
1p a ω− −
sin att eωω
⋅
( )2 2
p ap a ω
−− − cos att eω ⋅
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 36
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Korrespondenztafeln
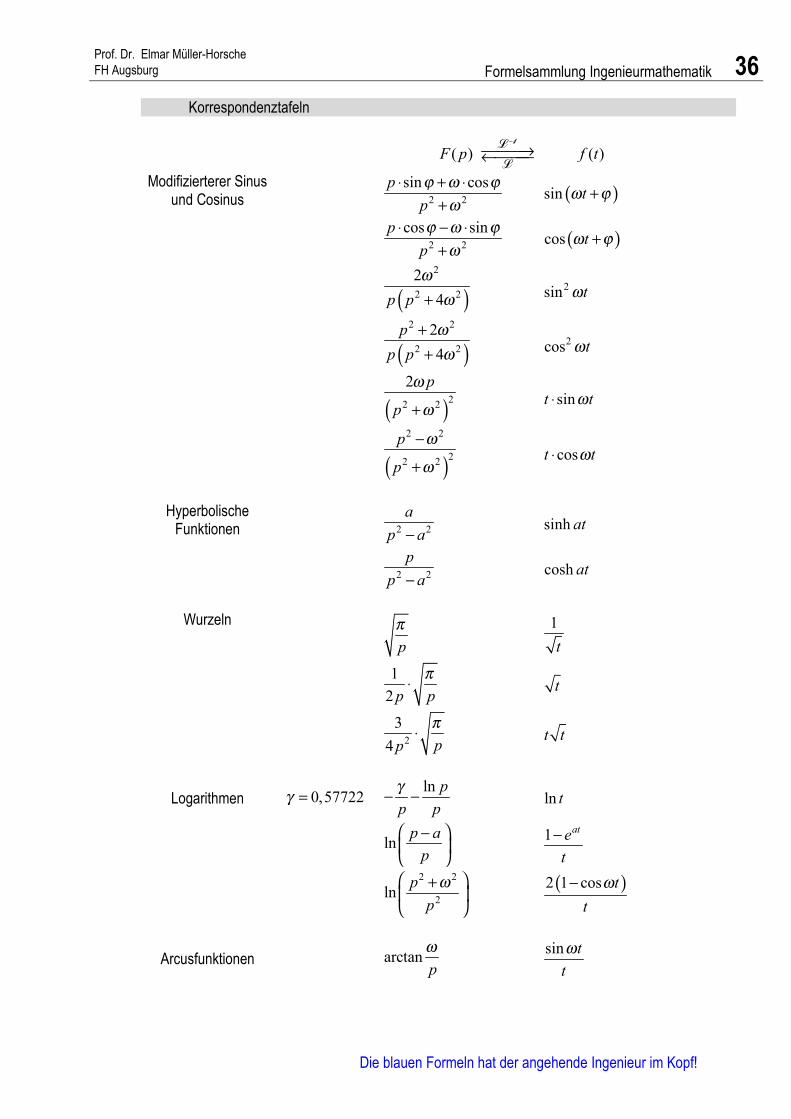
( ) ( )F p f t→←-1LL
Modifizierterer Sinusund Cosinus 2 2
sin cosppϕ ω ϕ
ω⋅ + ⋅
+( )sin tω ϕ+
2 2cos sinp
pϕ ω ϕ
ω⋅ − ⋅
+( )cos tω ϕ+
( )2
2 2
24p p
ωω+
2sin tω
( )2 2
2 2
24
pp p
ωω
++
2cos tω
( )22 2
2 p
p
ω
ω+sint tω⋅
( )2 2
22 2
p
p
ω
ω
−
+cost tω⋅
HyperbolischeFunktionen 2 2
ap a−
sinh at
2 2p
p a−cosh at
Wurzelnpπ 1
t
12 p p
π⋅ t
23
4 ppπ⋅ t t
Logarithmen 0,57722γ =ln p
p pγ− − ln t
ln p ap
−
1 atet
−
2 2
2ln pp
ω +
( )2 1 cos tt
ω−
Arcusfunktionen arctanpω sin t
tω

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 37
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Korrespondenztafeln
( ) ( )F p f t→←-1LL
Ein - Ausap bpe e
p
− −−
Treppe ( )1
1 app e−−
Rampe - Plateau ( )2
1 apk e
p
−−
Rechtecktanh ap
p
Ständig Ein - Aus ( )1
1 app e−+
Dreieck 2tanh2
apap
GleichgerichteterSinus 2 2 coth
2a p
ap aπ
+
a
1
tb
a1
t2a
23
at
kt
1t
2a-1
4a 6a
1ta 2a 3a
1t
2a 4a 6a
1t
π/a
Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 38
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Differenzialgleichungen (DGL)
DefinitionVersucht man in der Bewegungslehre, in der Biegelehre oder in der Statikkonkrete Problemstellungen in die mathematische Formelsprache zuübersetzen, so gelangt man häufig zu sog. Differenzialgleichungen (DGL).Die gesuchte Funktion (Bahn-Zeit-Funktion, Biegelinie oder Seilzug-Umschlingungswinkel-Funktion) ist mit ihren Ableitungen in einerGleichung verknüpft:
( )( , , ',..., ) 0 : ( )nf x y y y gesucht y x=Dies stellt die allgemeine Form einer DGL n-ter Ordnung dar. Diese sindnicht eindeutig lösbar sondern besitzen n unabhängigeIntegrationskonstante, die über Anfangs- oder Randbedingungenbestimmt werden müssen („wo befand sich die Masse z.Zt. t=0 und wieschnell war sie da“ ist z.B. eine typische Anfangsbedingung in derDynamik).
Trennung derVariablen
Lösungsmethode: Trennnung der Variablen bei DGL vom Typ:
1 2
1 2 1 2
1 2
( ) ( )
( ) ( ) ( ) ( ) ( !)
: ( ( )) ( ) :
dy f y f xdxf y dy f x dx f y dy f x dx Merkhilfe
Lösung F y x F x C F Stammfunktion von f
⋅ =
⋅ = ⋅ ⋅ = ⋅
= +∫ ∫
Lösungsüber-lagerung bei linearen
DGLs
Lösungsüberlagerung bei Linearer DGL vom Typ:( )
2 1 0( ) ... '' ( ) ' ( ) ( ) ( )nn
Störfunktion
y f x y f x y f x y f x g x⋅ + + ⋅ + ⋅ + ⋅ =
1) Finde allgemeine Lösung yh(x) der „homogenen Gleichung“ (rechteSeite = 0). Diese Lösung beinhaltet i.A. n unabhängige Integrations-konstante (s.o.).
2) Finde eine spezielle Lösung ys(x) der „inhomogenen Gleichung“ (incl.Störfunktion auf der rechten Seite). Diese Lösung ist nicht eindeutig.Man versucht, die einfachste Lösung zu finden. Die Lösungbeinhaltet keine Anpassparameter (Integrationskonstante).
3) Komplettlösung ist dann einfach die Summe: y(x) = yh(x) + ys(x). DieIntegrationskonstanten der homogenen Lösung müssen dann nochaus Anfangs- oder Randbedingungen bestimmt werden.

Prof. Dr. Elmar Müller-HorscheFH Augsburg Formelsammlung Ingenieurmathematik 39
Die blauen Formeln hat der angehende Ingenieur im Kopf!
Differenzialgleichungen (DGL)
Lösung mit Laplace-Transformation
Die Lineare DGL mit konstanten Koeffizienten und Anfangs-bedingungen:
( )2 1 0
( 1) ( 2)
... '' ' ( ) (*)
( 0), (0), ... , '(0), (0) :
nn
n n
a y a y a y a y g t
y t y y y vorgegebene Werte− −
⋅ + + ⋅ + ⋅ + ⋅ =
=(Variable jetzt mal die Zeit t) kann nach Schema f mit Hilfe der Laplace-Transformation gelöst werden. Dazu werden einfach linke und rechteSeite von (*) Laplace transformiert :
( ){ } { }
11 ( )
0
1 0
( ) (0) ... (**)
( ) (0) ( ) ( )
( ) ( ) ( ) ( )
nn n i i
ni
a p Y p p y
a p Y p y a Y p G p
Y p y t G p g t
−− −
=
⋅ ⋅ − ⋅ + +
+ ⋅ ⋅ − + ⋅ =
= =
∑
L L
(**) kann dann nach Y(p) (= Lösung im Bildraum) aufgelöst werden. Esergeben sich dabei oft rationale Funktionen. Um die gesuchte Lösung y(t)im Zeitbereich zu erhalten, muss man nur noch mit Partialbruchzerlegungzurück transformieren. Diese Lösung enthält dann keine freienIntegrationskonstanten mehr und erfüllt sämtliche vorgegebenenAnfangsbedingungen.
Gekoppelte DGL-Systeme
Das Verfahren (Laplace-Transformation) ist auch bei gekoppelten DGL-Systemen anwendbar.
Bsp.: ' 6 0 (0) 1' 5 2 0 (0) 0
y z y yz z y z
+ + = =+ + = =
Man bekommt im Bildraum ein algebraisches Gleichungssystem, das nachY(p), Z(p) usw. aufgelöst werden muss.


















