Industrial Automation - Plcs - Curso de Automatas Programables (Plc)
92
V BRAVO IES VENANCIO BRAVO Volumen 1 / 4
-
Upload
harold-fernando-giraldo-fernandez -
Category
Documents
-
view
493 -
download
14
Transcript of Industrial Automation - Plcs - Curso de Automatas Programables (Plc)
V BRAVO
IES VENANCIO BRAVO
Volumen
1 / 4
1
Intelligent Electromechanical Systems
C u r s o d e : Autómatas Programables
(PLC)
D E S A R R OL L O D E S O F T W A RE P A R A AP L I C A CI O N E S I N DU S T RI A L ES
Curso de Autómatas Programables – PLC
OBJETIVO DEL CURSO:
Con este curso de controladores lógicos programables, en 3 volúmenes, se busca instruir al personal técnico de manera que adquiera la habilidad necesaria para comprender y reparar de manera efectiva los sistemas de control basados en PLC. El personal técnico deberá poseer al termino del curso, además del conocimiento del manejo de las señales analógicas con el PLC, la capacidad para interpretar un programa en diagrama de escalera con instrucciones básicas de programación, así como las de intercambio de información y control de flujo del programa, además de las de operaciones aritméticas y relacionarlo con el resto de diagramas del sistema controlado, ya sean de tipo eléctrico o mecánico a fin de mantener un nivel de productividad óptimo con dicho sistema.
IES Venancio Bravo Loma Gpe 11324-B, Fracc. Virreyes • Tijuana, B.C. Teléfono 52 (664) 658 1358 • Fax 52 (664) 645 3483
http://www.intelligentes.com; [email protected]
Tabla de contenido C A P I T U L O 1 : E L P L C , P E R S P E C T I V A G E N E R A L
1.1 GENERALIDADES...........................................................................................................................................................................................1
1.1.1 Definición...............................................................................................................................................................1
1.1.2 Características del PLC: .......................................................................................................................................2
1.1.3 La idea intuitiva del PLC. .....................................................................................................................................2
1.1.4 Desarrollo del plc: .................................................................................................................................................4
1.2 COMPONENTES..............................................................................................................................................................................................5
1.3 TIPOS DE PLC Y ESPECIFICACIONES. .......................................................................................................................................................6
1.3.1 Modelos integrados................................................................................................................................................6
1.3.2 Modelos modulares. ..............................................................................................................................................6
1.3.3 Especificaciones. ....................................................................................................................................................7
1.4 CIRCUITOS DE CONTROL ALTERNATIVOS. ..............................................................................................................................................8
1.4.1 Ventajas sobre los circuitos basados en elementos de control electromecánico ...................................................8
1.4.2 Ventajas sobre los circuitos basados en ordenador...............................................................................................9
1.5 APLICACIONES.............................................................................................................................................................................................11
1.6 MÉTODOS DE PROGRAMACIÓN. ..............................................................................................................................................................12
1.6.1 Programación en lista de instrucciones...............................................................................................................12
1.6.2 Programación en diagrama de escalera. .............................................................................................................12
1.6.3 Programación en lenguaje de alto nivel. .............................................................................................................13
1.6.4 Programación en SFC (sequential flow chart) ....................................................................................................13
1.7 DIRECCIONAMIENTO DE PUNTOS DE CONEXIÓN EN MÓDULOS DE ENTRADA Y DE SALIDA. ....................................................14
1.8 RELEVADORES EXTERNOS E INTERNOS. ..............................................................................................................................................16
1.9 TIPOS DE MEMORIA. ...................................................................................................................................................................................17
2.1 EL SISTEMA NUMÉRICO DECIMAL ...........................................................................................................................................................19
2.2 SISTEMA NUMÉRICO BINARIO. .................................................................................................................................................................23
2.3 SISTEMA NUMÉRICO OCTAL. ....................................................................................................................................................................26
2.4 SISTEMA NUMÉRICO HEXADECIMAL.......................................................................................................................................................30
2.5 CÓDIGOS BINARIOS ....................................................................................................................................................................................34
3.1 LA PERSPECTIVA LÓGICA DE LOS ELEMENTOS DEL CIRCUITO.......................................................................................................45
3.2 LÓGICA COMBINATORIA. ...........................................................................................................................................................................48
3.2 LÓGICA SECUENCIAL. ................................................................................................................................................................................53
3.2.1 Circuito de memoria............................................................................................................................................53
4.1 EL CICLO DE BARRIDO DEL PROGRAMA, Ó “SCAN” ...........................................................................................................................58
4.2 MODOS DE OPERACIÓN DEL PLC ............................................................................................................................................................61
4.2.1 Modo de operación “Correr el programa o RUN” .............................................................................................61
4.2.1 Modo de operación “Detener ó STOP”...............................................................................................................61
4.2.1 Modo de operación “permitir programación ó PROGRAM”............................................................................61
4.3 PROCEDIMIENTOS GENERALES DE PROGRAMACIÓN. .......................................................................................................................62
4.3.1 Descripción del Hardware...................................................................................................................................62
4.3.2 Descripción de los Programas de interfaz o “Software”.....................................................................................63
4.4 INSTRUCCIONES BÁSICAS DE PROGRAMACIÓN..................................................................................................................................65
4.4.1 instrucciones por bit. ...........................................................................................................................................65
4.4.2 instrucciones de retardo y contadores.................................................................................................................68
4.4.3 Sistemas de control secuencial.............................................................................................................................74
4.4.4 Práctica 2. ............................................................................................................................................................75
5.1 MÓDULOS DE A.C. .......................................................................................................................................................................................76
5.2 MÓDULO DE LÓGICA POSITIVA ................................................................................................................................................................78
5.2 MÓDULOS DE LÓGICA NEGATIVA............................................................................................................................................................79
REFERENCIAS_______________________________________________________________________________________________72
GLOSARIO...........................................................................................................................................................................................................81
Presentación:La ut i l ización de “autómatas
programables” o controladores
lógicos programables (PLC),
en los sistemas de control de
plantas se ha extendido tan
rápido en los últ imos años
que, en la actualidad, es
dif íci l encontrar una industria
en la que no se manejen. Éste
t ipo de disposit ivos de control
electrónico, son sistemas que
han evolucionado a un grado
versat i l idad considerable. Se
puede af irmar que casi todo
t ipo de control de procesos,
que se requiera, se puede
realizar con un PLC. Y ésta
es, justamente, la razón de
que sean tan populares en la
actualidad. Además de tener
la capacidad de comunicación
con las interfaces hombre-
máquina (HMI), desde las que
el operador puede obtener e
introducir datos y realizar
operaciones relat ivas al
control del proceso, y la
posible adición de módulos
especializados, el PLC t iene
la capacidad de integrarse en
sistemas más grandes y de
mayor complejidad. Éstos se
const ituyen de un determinado
número de unidades, ya sea
del mismo t ipo o diferentes,
necesarias, que se comunican
entre ellas, ya sea de manera
directa o remota; y hasta de
integrarse en complejos, y en
ocasiones enormes, Sistemas
de Manufactura asist ida por
Computadora (CIM), por
medio del establecimiento de
la comunicación en redes de
diversos niveles. El PLC, dado
su amplio campo de
aplicación, es materia de
estudio necesaria de toda
persona que tenga la
expectat iva de trabajar en las
diferentes áreas técnicas de
la industria contemporánea.
I E S A U T Ó M A T A S P R O G R A M A B L E S
1
Familiarizándose con Autómatas
El Autómata Programable o PLC, puede ser considerado como una caja negra que contiene un conjunto de entradas y salidas, en las cuales se conectarán directamente los elementos primarios y finales de control..Es capaz de controlar un proceso, por medio de dichos dispositivos y la programación de la lógica adecuada.
1.1 Generalidades En este capítulo, el lector tiene una cercamiento al PLC y conoce sus características. Se definirá el Autómata Programable, y de manera general se explican sus características y aplicaciones. Así mismo, se ofrece un panorama general de la forma de operar, configurar y programar el PLC.
1.1.1 Definición
ircuito electrónico basado en microprocesador, usado en una gran variedad de industrias, que nos permite controlar sistemas, procesos ó máquinas. Contiene dos conjuntos, principales, de puntos de conexión conocidos como entradas y salidas. El estado de las salidas,
Capítulo
1
C
I E S A U T Ó M A T A S P R O G R A M A B L E S
2
dependen del estado de las entradas y la lógica del programa. La sigla PLC define sus características principales: Controla una planta por medio de la lógica definida en el programa de usuario, y es programable tantas veces como sea necesario.
A éste nivel, no se profundiza hacia el interior, sino se considera como una caja negra que manipula señales a las salidas, por medio del estado de las entradas y la lógica asociada. En ocasiones se elimina la L de dicha sigla, debido a que los controladores son mucho más poderosos que sus predecesores, aquellos que solamente manejaban instrucciones lógicas, de manera que en algunos fabricantes muestran tendencia a denominarlo “PC” (Controlador Programable).
1.1.2 Características del PLC:
Controlador: Nos permite controlar un sistema, haciendo uso de los puntos de conexión de entradas y salidas. A través de dichos puntos se interconecta con los elementos, primarios y finales, de control.
Programable: Es capaz de almacenar el programa de usuario en memoria no volátil, Así mismo es re-programable tantas veces como sea necesario.
Lógico:
Los programas se constituyen de un conjunto de instrucciones lógicas, Aunque actualmente los PLC son muy poderosos y manejan un conjunto de instrucciones muy amplio, de manera que no están limitados a realizar funciones lógicas, exclusivamente.
Tabla 1 Características fundamentales del Autómata Programable (PLC).
A algunos controladores compactos, también se les llama “Small Logic Controller” (SLC), mientras otros fabricantes les llaman, a sus productos, Autómata Programables; y existe una secundaria y amplia diversidad de nombres y familias con que cada uno de los fabricantes identifican sus productos como “Micro-PLC”, “PLC compacto”, “PLC integrado”, entre otros términos acuñados para el mercado.
1.1.3 El concepto básico del PLC.
Entrada 0 Salida 0 Entrada 1 Salida 1 Entrada 2 Salida 2 P L C
I E S A U T Ó M A T A S P R O G R A M A B L E S
3
Entrada 3 Salida 3 . . . . . . Entrada n Salida m
Figura 1. El concepto básico del PLC: Una caja negra que interactúa con el exterior por medio de un grupo de entradas y salidas en diferente número,
l
I E S A U T Ó M A T A S P R O G R A M A B L E S
4
Como se aprecia en la figura 1, el Autómata Programable contiene un conjunto de entradas y salidas, en diferente número. Además cada uno de estos puntos de conexión, ya sea entrada ó salida, está claramente identificado. El objetivo es diferenciar, primeramente, los puntos de conexión que son entradas, de aquellos otros que son salidas; luego se enumeran ambos tipos de puntos de conexión. La identificación de estos dispositivos, se conoce como direccionamiento, significa que a cada uno de estos puntos de conexión se les asigna una dirección específica. Una vez que determinamos la dirección a la cuál va a estar conectado cada uno de dichos dispositivos externos, podemos programar el PLC para que, en base a las condiciones que guarden las entradas, manipule el estado de las salidas. El programa de usuario se compone de un conjunto de instrucciones que el PLC ejecutará de manera secuencial y cíclica, en el cual le indicamos las direcciones de las salidas que deberá manipular en base al estado de las entradas y las operaciones que debe realiza durante la ejecución del programa. El direccionamiento para varios tipos de PLC, y sus diferencias, se ilustran en el punto 1.7.
1.1.4 Desarrollo del PLC.
El Controlador Lógico (PLC) fue desarrollado por MODICONi, alrededor de 1970, para la industria Automotriz, con la finalidad de reemplazar los circuitos basados en relevadores electromecánicos. La razón de este reemplazo era permitir a los técnicos modificar fácilmente la secuencia de operaciones de la máquina por medio de reprogramar dicho sistema, en vez de reconstruir todo el circuito. Hoy en día, el uso del Controlador Lógico se ha expandido a todo tipo de industria y la tendencia es aún ascendente.
I E S A U T Ó M A T A S P R O G R A M A B L E S
5
1.2 Componentes
El PLC es un dispositivo electrónico basado en un microprocesador y que contiene algunos otros circuitos adicionales que interactúan con éste. Entre sus componentes principales se encuentran los siguientes:
Fuente de poder. Proporciona energía (DC) a los circuitos electrónicos que conforman al controlador. Su entrada puede ser AC o DC, con valores de voltaje típicos como 220V, 115V, 24V ó 12V. Unidad Central de Proceso. (También llamada CPU). Realiza las operaciones aritméticas y lógicas, y además controla la secuencia de ejecución del programa, Coordina la comunicación requerida entre los diversos circuitos, entre otras funciones Módulos de entrada. Reciben las señales eléctricas directamente de los dispositivos primarios de control. Módulos de salida. Envían señales a los elementos finales de control, controlado así el estado que éstos mantengan. Batería. Mantiene energizada la memoria RAM que almacena el programa mientras el PLC permanece des-energizado. El PLC, con batería, generalmente puede mantener el programa durante alrededor de tres meses. La vida útil de la batería, varía de 1 a 3 años. En aquellos PLCs que contienen memoria no volátil (ROM o de cualquier otro tipo), la batería no es indispensable. Memoria o módulo de memoria. Almacena el programa de la aplicación. Esta puede ser de tipo volátil o no volátil (RAM o ROM). Puerto de comunicaciones. Permite al PLC establecer comunicación e intercambiar información con dispositivos externos, ya sea otros PLCs, Interfaz (HMI), unidades de programación, periféricos, o alguna otra unidad conectada en red.
I E S A U T Ó M A T A S P R O G R A M A B L E S
6
1.3 Tipos de PLC y especificaciones.
Las características del PLC dependen de aquellas de cada uno de sus componentes. Existen aquellos compuestos de una sola unidad, llamados integrados o compactos, así como los modulares, esto es, se componen de varios módulos. Esta característica (que se puede integrar por módulos) le provee de una gran flexibilidad al usuario final, puesto que puede seleccionar cada uno de los módulos con las características específicas que requiere. De aquí que el fabricante siempre nos ofrece un conjunto amplio de alternativas y enlista las especificaciones de cada producto.
1.3.1 Modelos integrados.
Es un PLC completo, aunque para aplicaciones de tamaño pequeño, e integra todos los componentes descritos en el punto 1.2, en una sola unidad. Se le conoce como PLC para aplicaciones pequeñas ó SLC. El CPU, el módulo de memoria, los puntos de entrada y salida, la batería, generalmente la fuente, y en muchas ocasiones hasta el cable de comunicación y el software de interfaz para computadora, forman parte del mismo paquete comercial; aunque, desde luego, estos últimos no están integrados en la unidad.
1.3.2 Modelos modulares.
Se componen de diversos elementos capaces de agruparse con otros semejantes, denominados módulos. Estos se seleccionan y se integran en una unidad (configuran) de acuerdo a la necesidad del. usuario final, puesto que su diseño ofrece las opciones de agrupación, en gran diversidad. Aún cuando los módulos componentes sean semejantes, sus características pueden cambiar de manera radical. Un sistema modular típico se compone de: la tarjeta madre (“chasis” o “rack”), el CPU o procesador, el módulo de memoria, y los módulos de entrada y los de salida, que pueden ser digitales o analógicos y con un amplio rango de diferencias entre ellos. Pueden adicionarse módulos especializados, que realizan una tarea de control específica y compleja.
I E S A U T Ó M A T A S P R O G R A M A B L E S
7
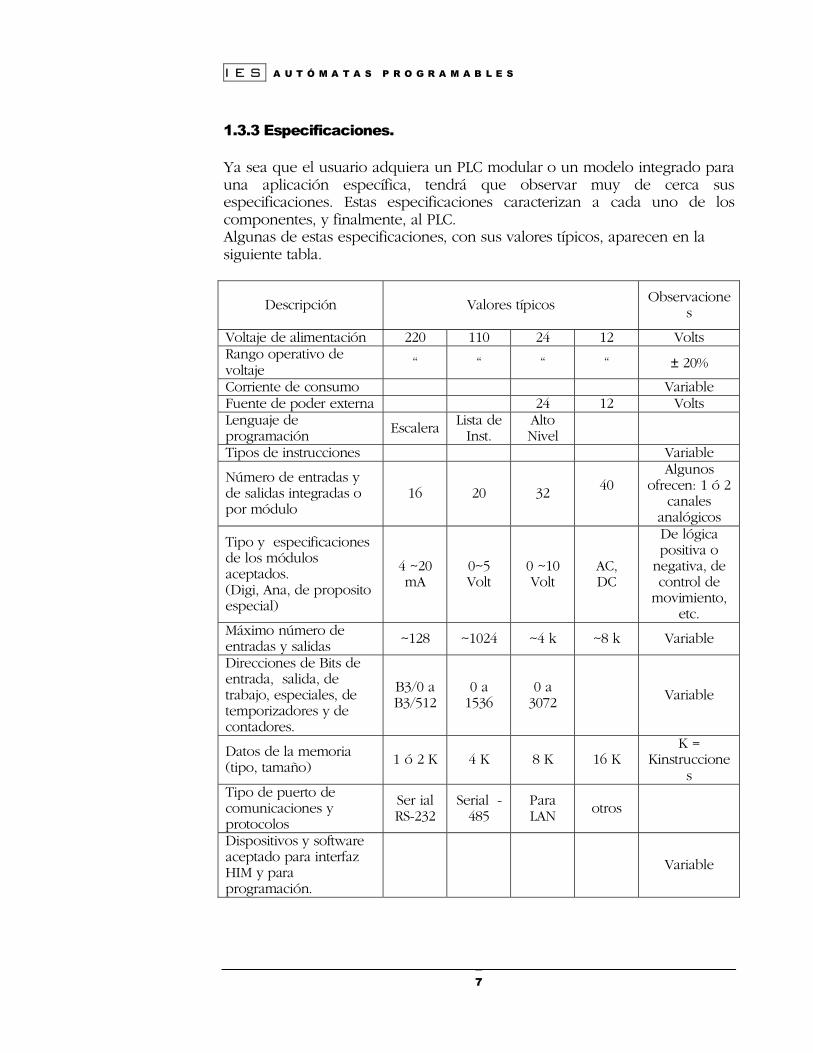
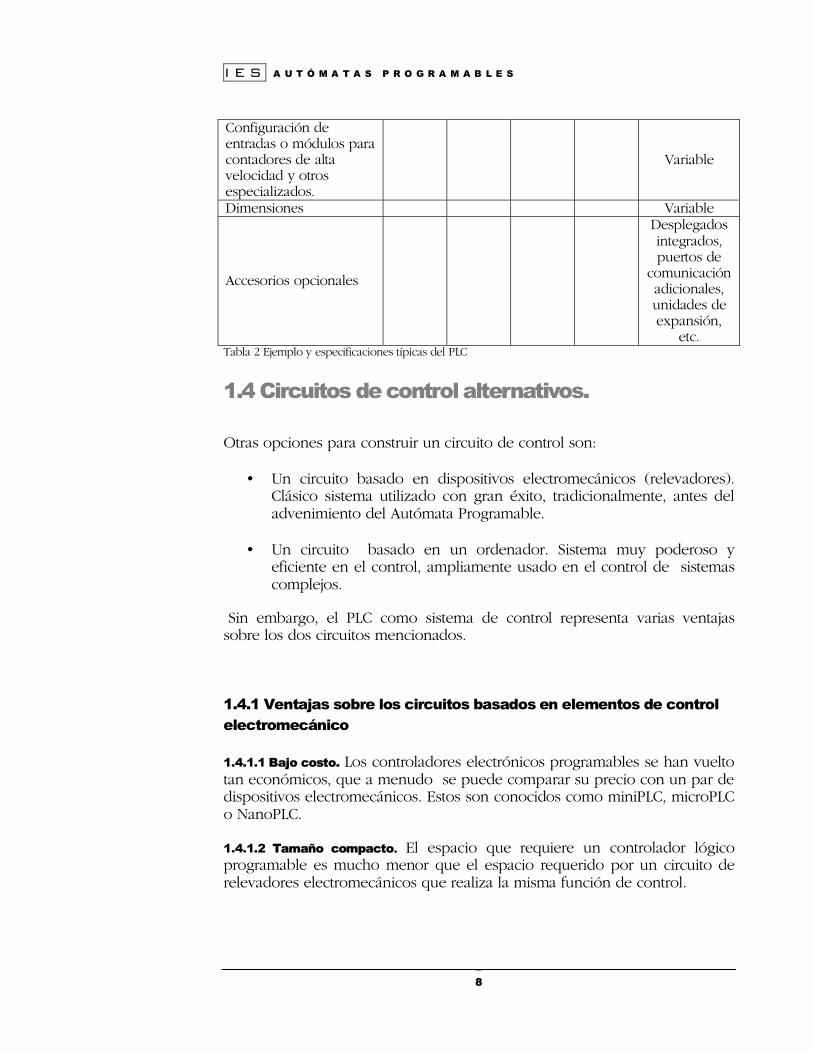
1.3.3 Especificaciones.
Ya sea que el usuario adquiera un PLC modular o un modelo integrado para una aplicación específica, tendrá que observar muy de cerca sus especificaciones. Estas especificaciones caracterizan a cada uno de los componentes, y finalmente, al PLC. Algunas de estas especificaciones, con sus valores típicos, aparecen en la siguiente tabla.
Descripción Valores típicos Observaciones
Voltaje de alimentación 220 110 24 12 Volts Rango operativo de voltaje
“ “ “ “ ± 20%
Corriente de consumo Variable Fuente de poder externa 24 12 Volts Lenguaje de programación Escalera Lista de
Inst. Alto Nivel
Tipos de instrucciones Variable
Número de entradas y de salidas integradas o por módulo
16 20 32 40
Algunos ofrecen: 1 ó 2
canales analógicos
Tipo y especificaciones de los módulos aceptados. (Digi, Ana, de proposito especial)
4 ~20 mA
0~5 Volt
0 ~10 Volt
AC, DC
De lógica positiva o
negativa, de control de
movimiento, etc.
Máximo número de entradas y salidas ~128 ~1024 ~4 k ~8 k Variable
Direcciones de Bits de entrada, salida, de trabajo, especiales, de temporizadores y de contadores.
B3/0 a B3/512
0 a 1536
0 a 3072 Variable
Datos de la memoria (tipo, tamaño) 1 ó 2 K 4 K 8 K 16 K
K = Kinstruccione
s Tipo de puerto de comunicaciones y protocolos
Ser ial RS-232
Serial -485
Para LAN otros
Dispositivos y software aceptado para interfaz HIM y para programación.
Variable
I E S A U T Ó M A T A S P R O G R A M A B L E S
8
Configuración de entradas o módulos para contadores de alta velocidad y otros especializados.
Variable
Dimensiones Variable
Accesorios opcionales
Desplegados integrados, puertos de
comunicación adicionales, unidades de expansión,
etc. Tabla 2 Ejemplo y especificaciones típicas del PLC
1.4 Circuitos de control alternativos.
Otras opciones para construir un circuito de control son:
• Un circuito basado en dispositivos electromecánicos (relevadores). Clásico sistema utilizado con gran éxito, tradicionalmente, antes del advenimiento del Autómata Programable.
• Un circuito basado en un ordenador. Sistema muy poderoso y eficiente en el control, ampliamente usado en el control de sistemas complejos.
Sin embargo, el PLC como sistema de control representa varias ventajas sobre los dos circuitos mencionados.
1.4.1 Ventajas sobre los circuitos basados en elementos de control electromecánico
1.4.1.1 Bajo costo. Los controladores electrónicos programables se han vuelto tan económicos, que a menudo se puede comparar su precio con un par de dispositivos electromecánicos. Estos son conocidos como miniPLC, microPLC o NanoPLC. 1.4.1.2 Tamaño compacto. El espacio que requiere un controlador lógico programable es mucho menor que el espacio requerido por un circuito de relevadores electromecánicos que realiza la misma función de control.
I E S A U T Ó M A T A S P R O G R A M A B L E S
9
1.4.1.3 Funciones avanzadas. La memoria y la características de programación del controlador programable le proporcionan al PLC tanta flexibilidad y versatilidad, que se ha colocado en todas las industrias, le permiten realizar funciones adicionales a las que realiza un circuito de relevadores como son: contadores de alta velocidad, salidas pulsantes para motores de pasos, y hasta se pueden registrar los datos para generar reportes de producción; además puede realizar funciones sincronizadas en tiempo real y mantenerse en comunicación con cualquier sistema de control de la producción aún cuando este ubicado remotamente. 1.4.1.4 Flexibilidad. Cuando se requiere que el sistema realice funciones diferentes, basta con reprogramar el PLC y, si es necesario, modificar las direcciones.
1.4.2 Ventajas sobre los circuitos basados en ordenador.
También se podría utilizar un sistema de computo para controlar el proceso, pero un controlador programable es más adecuado que un ordenador para una aplicación industrial debido a que ofrece las siguientes ventajas:
1.4.2.1 La robusta construcción del controlador programable que permite la instalación en el ambiente industrial, que generalmente es agresivo ó rudo, la unidad generalmente está sellada y además el circuito está diseñado para soportar los niveles de ruido eléctrico características de la industria.
1.4.2.2 La facilidad de interfaz. Dado que la función del PLC consiste en controlar dispositivos eléctricos industriales usados comúnmente como son solenoides o lámparas de 120V CA, estos se conectan directamente a los módulos de salida del PLC. La computadora en cambio trabaja con niveles muy pequeños de CD, de manera que sería necesario utilizar algún tipo de interfaz para conectar estos dispositivos.
1.4.2.3 Sencillo lenguaje de programación. La forma de representar sistemas de control basados en relevadores es un diagrama de escalera, y la aceptación del PLC en la industria se debe a la facilidad de operación y programación del mismo, dado que usa la simbología que ya era conocida en la industria por las personas involucradas con los sistemas de control por relevadores. Ésta es similar a los contactos y bobinas de relevadores, los mismos símbolos que se usan en el diagrama de escalera de un circuito de relevadores electromecánicos, aún cuando el PLC no contiene relevadores en su interior para realizar las funciones lógicas.
1.4.2.4 Versatilidad. Hoy en día, a los PLC se les pueden adicionar módulos de control de señales analógicas e interfaces HIM con entrada de datos por medio de teclados programables y pantallas que muestran datos en forma
I E S A U T Ó M A T A S P R O G R A M A B L E S
10
gráfica, entre otras características, además de los módulos de propósito especial; de esta manera, el PLC puede realizar funciones que anteriormente solo un circuito de control basado en computadora podría realizar.
I E S A U T Ó M A T A S P R O G R A M A B L E S
11
1.5 Aplicaciones. Las primeras aplicaciones del PLC consistían en realizar operaciones de control de tipo “Todo-Nada” en la máquina, esto quiere decir que era capaz de conmutar elementos por medio de energizar y des-energizar elementos tales como arrancadores, relevadores, válvulas, entre otros dispositivos de dos estados. En el área de control de procesos, esto representa tener el poder de controlar una variable tal como la presión, temperatura, el nivel; entre otros, por medio de la manipulación de dispositivos con contactos; así se realiza con los interruptores de flotador, termostatos, controladores de presión (presostatos), etc.
Sin embargo, actualmente los controladores programables pueden realizar una gran cantidad de funciones adicionales, lo cual los hace más útiles en el control continuo de procesos y control de movimiento de los mecanismos, entre otros tipos de control especializado. Además, los autómatas programables cuentan con la característica de expansión lo que posibilita la adición de módulos opcionales de entradas y /o salidas (módulos I/O) ya sean de tipo digital ó analógico, a los módulos de salida de relevador o de estado sólido. Se puede afirmar que, actualmente, con los PLC se puede resolver casi cualquier problema de aplicación de control.
El campo de aplicación de los autómatas programables se han extendido enormemente. Enseguida se enlistan algunas de las aplicaciones típicas en las áreas de automatización de planta, manejo de materiales y robótica:
• Control de diversos tipos de manipuladores y robots • De máquinas de inyección • De dispositivos de transferencia automática • Control ambiental en casas y edificios, entre otras aplicaciones
domésticas. • Carga y descarga de máquinas • Mecanismos de ensamble de los más variados tipos
En el manual de prácticas, se describen aplicaciones del PLC en los sistemas de manejo de materiales: Un elevador de carga, un transportador vertical, además de, la aplicación de control de una máquina de inyección de plástico y el de una línea aplicación de pintura. Todos estos, parte de las prácticas, complemento del curso.
I E S A U T Ó M A T A S P R O G R A M A B L E S
12
1.6 Métodos de programación. El PLC puede ser programado, usando diferentes lenguajes. Estos, difieren de acuerdo a las características particulares de cada modelo de PLC con que se trabaja. No obstante, todo tipo de PLC puede programarse usando uno ó más de los siguientes.
1.6.1 Programación en lista de instrucciones.
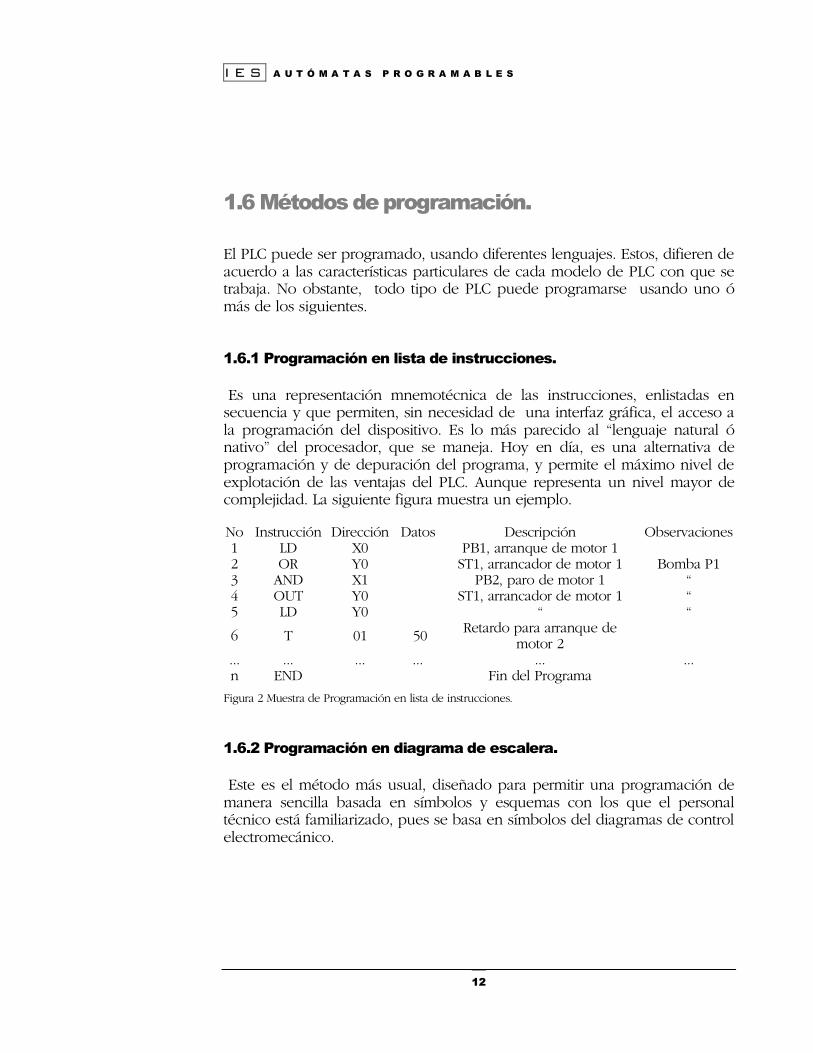
Es una representación mnemotécnica de las instrucciones, enlistadas en secuencia y que permiten, sin necesidad de una interfaz gráfica, el acceso a la programación del dispositivo. Es lo más parecido al “lenguaje natural ó nativo” del procesador, que se maneja. Hoy en día, es una alternativa de programación y de depuración del programa, y permite el máximo nivel de explotación de las ventajas del PLC. Aunque representa un nivel mayor de complejidad. La siguiente figura muestra un ejemplo.
No Instrucción Dirección Datos Descripción Observaciones1 LD X0 PB1, arranque de motor 1 2 OR Y0 ST1, arrancador de motor 1 Bomba P1 3 AND X1 PB2, paro de motor 1 “ 4 OUT Y0 ST1, arrancador de motor 1 “ 5 LD Y0 “ “
6 T 01 50 Retardo para arranque de motor 2
... ... ... ... ... ... n END Fin del Programa
Figura 2 Muestra de Programación en lista de instrucciones.
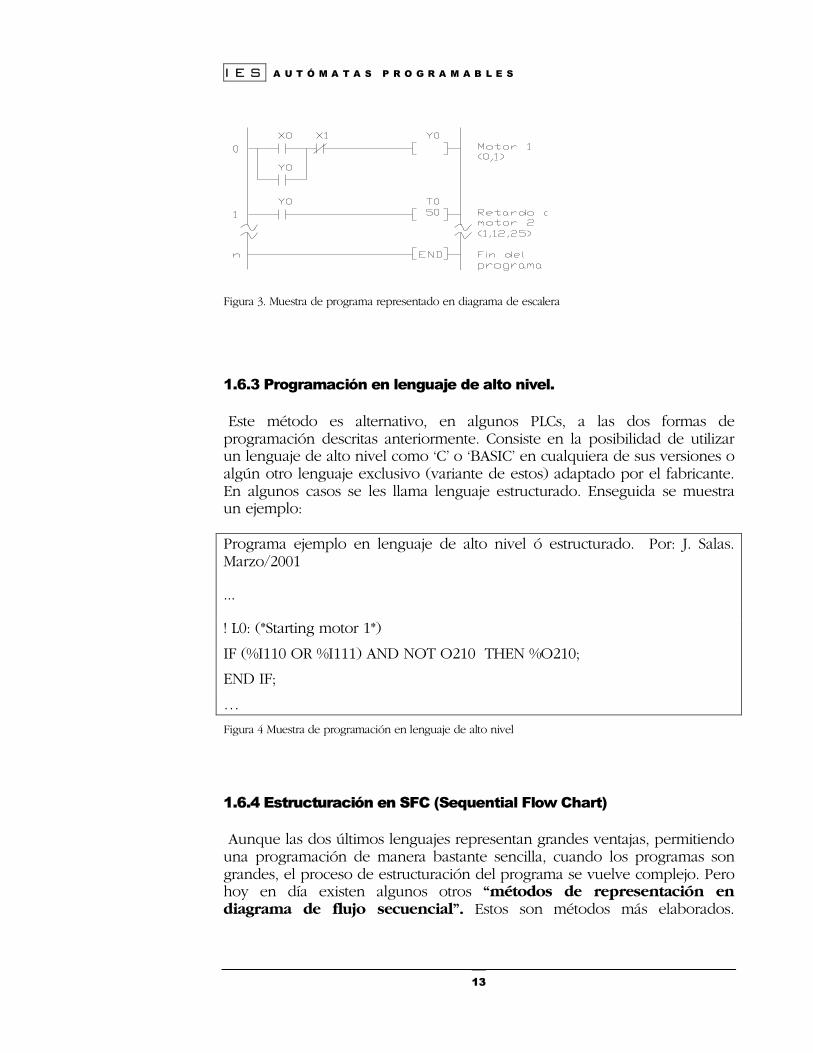
1.6.2 Programación en diagrama de escalera.
Este es el método más usual, diseñado para permitir una programación de manera sencilla basada en símbolos y esquemas con los que el personal técnico está familiarizado, pues se basa en símbolos del diagramas de control electromecánico.
I E S A U T Ó M A T A S P R O G R A M A B L E S
13
Figura 3. Muestra de programa representado en diagrama de escalera
1.6.3 Programación en lenguaje de alto nivel.
Este método es alternativo, en algunos PLCs, a las dos formas de programación descritas anteriormente. Consiste en la posibilidad de utilizar un lenguaje de alto nivel como ‘C’ o ‘BASIC’ en cualquiera de sus versiones o algún otro lenguaje exclusivo (variante de estos) adaptado por el fabricante. En algunos casos se les llama lenguaje estructurado. Enseguida se muestra un ejemplo:
Programa ejemplo en lenguaje de alto nivel ó estructurado. Por: J. Salas. Marzo/2001
...
! L0: (*Starting motor 1*)
IF (%I110 OR %I111) AND NOT O210 THEN %O210;
END IF;
…
Figura 4 Muestra de programación en lenguaje de alto nivel
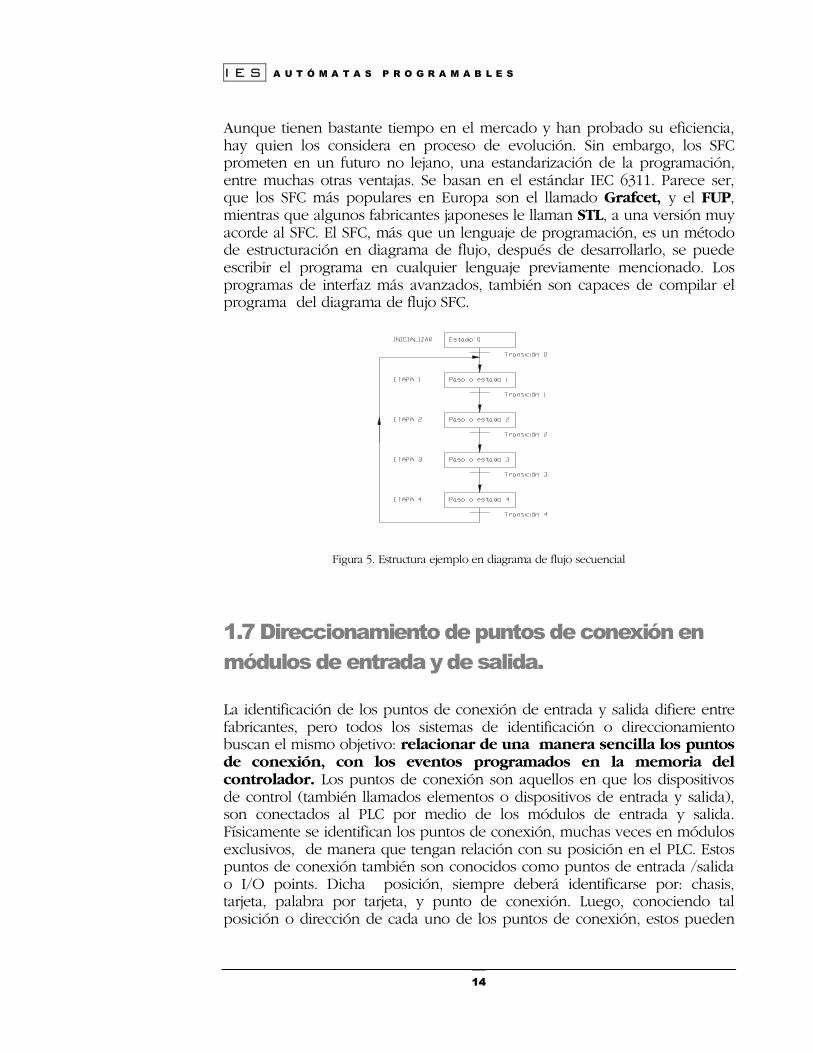
1.6.4 Estructuración en SFC (Sequential Flow Chart)
Aunque las dos últimos lenguajes representan grandes ventajas, permitiendo una programación de manera bastante sencilla, cuando los programas son grandes, el proceso de estructuración del programa se vuelve complejo. Pero hoy en día existen algunos otros “métodos de representación en diagrama de flujo secuencial”. Estos son métodos más elaborados.
I E S A U T Ó M A T A S P R O G R A M A B L E S
14
Aunque tienen bastante tiempo en el mercado y han probado su eficiencia, hay quien los considera en proceso de evolución. Sin embargo, los SFC prometen en un futuro no lejano, una estandarización de la programación, entre muchas otras ventajas. Se basan en el estándar IEC 6311. Parece ser, que los SFC más populares en Europa son el llamado Grafcet, y el FUP, mientras que algunos fabricantes japoneses le llaman STL, a una versión muy acorde al SFC. El SFC, más que un lenguaje de programación, es un método de estructuración en diagrama de flujo, después de desarrollarlo, se puede escribir el programa en cualquier lenguaje previamente mencionado. Los programas de interfaz más avanzados, también son capaces de compilar el programa del diagrama de flujo SFC.
Figura 5. Estructura ejemplo en diagrama de flujo secuencial
1.7 Direccionamiento de puntos de conexión en módulos de entrada y de salida.
La identificación de los puntos de conexión de entrada y salida difiere entre fabricantes, pero todos los sistemas de identificación o direccionamiento buscan el mismo objetivo: relacionar de una manera sencilla los puntos de conexión, con los eventos programados en la memoria del controlador. Los puntos de conexión son aquellos en que los dispositivos de control (también llamados elementos o dispositivos de entrada y salida), son conectados al PLC por medio de los módulos de entrada y salida. Físicamente se identifican los puntos de conexión, muchas veces en módulos exclusivos, de manera que tengan relación con su posición en el PLC. Estos puntos de conexión también son conocidos como puntos de entrada /salida o I/O points. Dicha posición, siempre deberá identificarse por: chasis, tarjeta, palabra por tarjeta, y punto de conexión. Luego, conociendo tal posición o dirección de cada uno de los puntos de conexión, estos pueden
I E S A U T Ó M A T A S P R O G R A M A B L E S
15
ser asignados a determinada función, en el programa del PLC, por medio de su dirección asociada que lo identifica plenamente. Nunca, bajo ninguna circunstancia, existen dos direcciones para el mismo punto, ni dos puntos para la misma dirección.
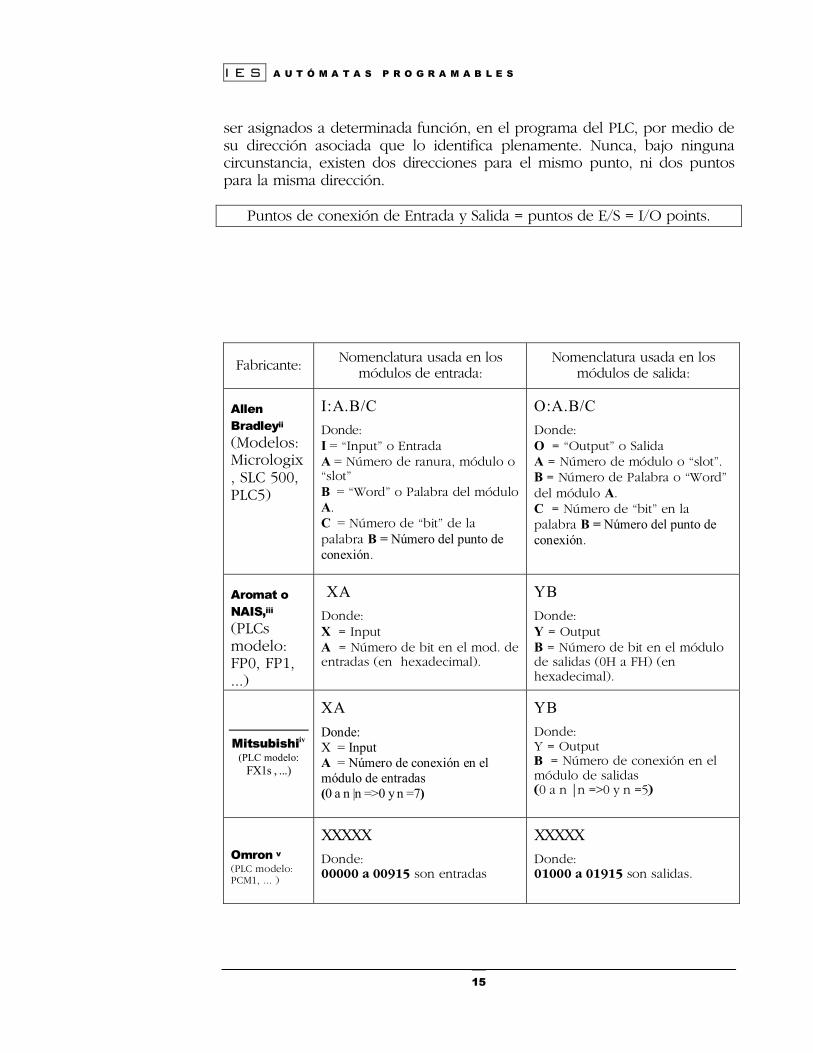
Puntos de conexión de Entrada y Salida = puntos de E/S = I/O points.
Fabricante: Nomenclatura usada en los módulos de entrada:
Nomenclatura usada en los módulos de salida:
Allen Bradleyii (Modelos: Micrologix, SLC 500, PLC5)
I : A . B / C Donde: I = “Input” o Entrada A = Número de ranura, módulo o “slot” B = “Word” o Palabra del módulo A. C = Número de “bit” de la palabra B = Número del punto de conexión.
O : A . B / C Donde: O = “Output” o Salida A = Número de módulo o “slot”. B = Número de Palabra o “Word” del módulo A. C = Número de “bit” en la palabra B = Número del punto de conexión.
Aromat o NAIS,iii (PLCs modelo: FP0, FP1, ...)
X A Donde: X = Input A = Número de bit en el mod. de entradas (en hexadecimal).
Y B Donde: Y = Output B = Número de bit en el módulo de salidas (0H a FH) (en hexadecimal).
Mitsubishiiv (PLC modelo:
FX1s , ...)
X A Donde: X = Input A = Número de conexión en el módulo de entradas (0 a n |n =>0 y n =7)
Y B Donde: Y = Output B = Número de conexión en el módulo de salidas (0 a n |n =>0 y n =5)
Omron v (PLC modelo: PCM1, ... )
XXXXX Donde: 00000 a 00915 son entradas
XXXXX Donde: 01000 a 01915 son salidas.
I E S A U T Ó M A T A S P R O G R A M A B L E S
16
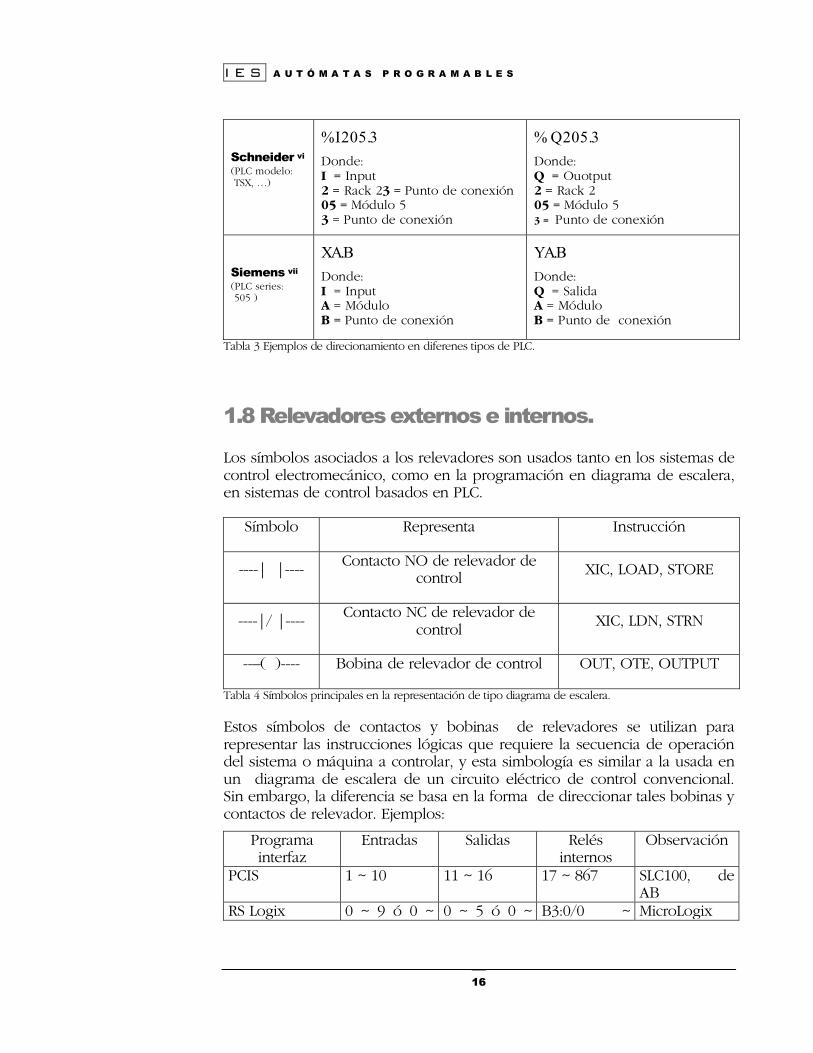
Schneider vi (PLC modelo: TSX, …)
% I 2 0 5 .3 Donde: I = Input 2 = Rack 23 = Punto de conexión 05 = Módulo 5 3 = Punto de conexión
% Q 2 0 5 .3 Donde: Q = Ouotput 2 = Rack 2 05 = Módulo 5 3 = Punto de conexión
Siemens vii (PLC series: 505 )
XA.B Donde: I = Input A = Módulo B = Punto de conexión
YA.B Donde: Q = Salida A = Módulo B = Punto de conexión
Tabla 3 Ejemplos de direcionamiento en diferenes tipos de PLC.
1.8 Relevadores externos e internos.
Los símbolos asociados a los relevadores son usados tanto en los sistemas de control electromecánico, como en la programación en diagrama de escalera, en sistemas de control basados en PLC.
Símbolo Representa Instrucción
----| |---- Contacto NO de relevador de control XIC, LOAD, STORE
----|/ |---- Contacto NC de relevador de control
XIC, LDN, STRN
--–( )---- Bobina de relevador de control OUT, OTE, OUTPUT
Tabla 4 Símbolos principales en la representación de tipo diagrama de escalera.
Estos símbolos de contactos y bobinas de relevadores se utilizan para representar las instrucciones lógicas que requiere la secuencia de operación del sistema o máquina a controlar, y esta simbología es similar a la usada en un diagrama de escalera de un circuito eléctrico de control convencional. Sin embargo, la diferencia se basa en la forma de direccionar tales bobinas y contactos de relevador. Ejemplos:
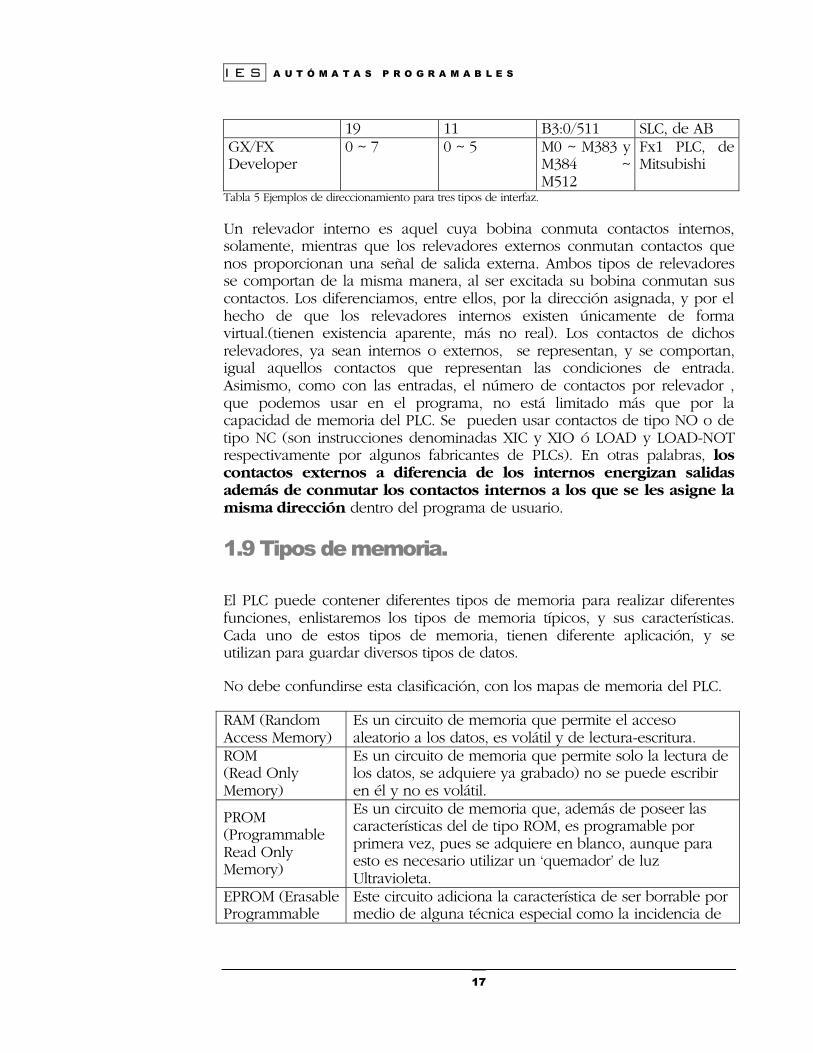
Programa interfaz
Entradas Salidas Relés internos
Observación
PCIS 1 ~ 10 11 ~ 16 17 ~ 867 SLC100, de AB
RS Logix 0 ~ 9 ó 0 ~ 0 ~ 5 ó 0 ~ B3:0/0 ~ MicroLogix
I E S A U T Ó M A T A S P R O G R A M A B L E S
17
19 11 B3:0/511 SLC, de AB GX/FX Developer
0 ~ 7 0 ~ 5 M0 ~ M383 y M384 ~ M512
Fx1 PLC, de Mitsubishi
Tabla 5 Ejemplos de direccionamiento para tres tipos de interfaz.
Un relevador interno es aquel cuya bobina conmuta contactos internos, solamente, mientras que los relevadores externos conmutan contactos que nos proporcionan una señal de salida externa. Ambos tipos de relevadores se comportan de la misma manera, al ser excitada su bobina conmutan sus contactos. Los diferenciamos, entre ellos, por la dirección asignada, y por el hecho de que los relevadores internos existen únicamente de forma virtual.(tienen existencia aparente, más no real). Los contactos de dichos relevadores, ya sean internos o externos, se representan, y se comportan, igual aquellos contactos que representan las condiciones de entrada. Asimismo, como con las entradas, el número de contactos por relevador , que podemos usar en el programa, no está limitado más que por la capacidad de memoria del PLC. Se pueden usar contactos de tipo NO o de tipo NC (son instrucciones denominadas XIC y XIO ó LOAD y LOAD-NOT respectivamente por algunos fabricantes de PLCs). En otras palabras, los contactos externos a diferencia de los internos energizan salidas además de conmutar los contactos internos a los que se les asigne la misma dirección dentro del programa de usuario.
1.9 Tipos de memoria.
El PLC puede contener diferentes tipos de memoria para realizar diferentes funciones, enlistaremos los tipos de memoria típicos, y sus características. Cada uno de estos tipos de memoria, tienen diferente aplicación, y se utilizan para guardar diversos tipos de datos.
No debe confundirse esta clasificación, con los mapas de memoria del PLC.
RAM (Random Access Memory)
Es un circuito de memoria que permite el acceso aleatorio a los datos, es volátil y de lectura-escritura.
ROM (Read Only Memory)
Es un circuito de memoria que permite solo la lectura de los datos, se adquiere ya grabado) no se puede escribir en él y no es volátil.
PROM (Programmable Read Only Memory)
Es un circuito de memoria que, además de poseer las características del de tipo ROM, es programable por primera vez, pues se adquiere en blanco, aunque para esto es necesario utilizar un ‘quemador’ de luz Ultravioleta.
EPROM (Erasable Programmable
Este circuito adiciona la característica de ser borrable por medio de alguna técnica especial como la incidencia de
I E S A U T Ó M A T A S P R O G R A M A B L E S
18
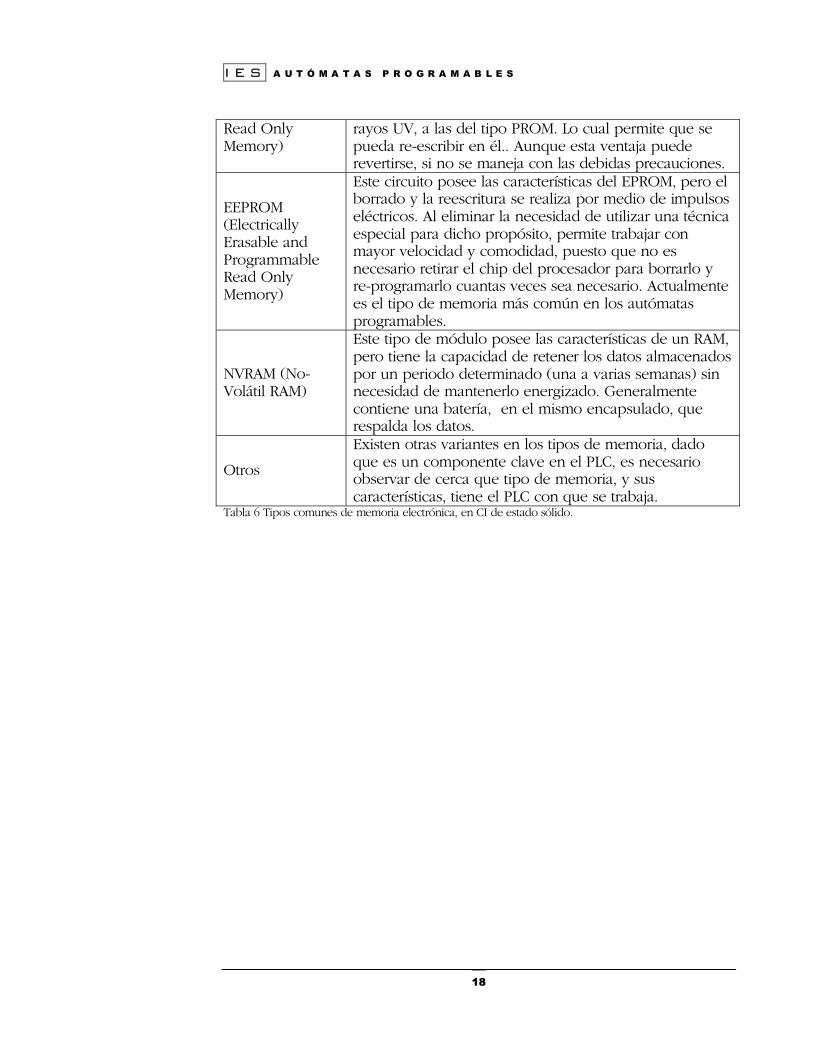
Read Only Memory)
rayos UV, a las del tipo PROM. Lo cual permite que se pueda re-escribir en él.. Aunque esta ventaja puede revertirse, si no se maneja con las debidas precauciones.
EEPROM (Electrically Erasable and Programmable Read Only Memory)
Este circuito posee las características del EPROM, pero el borrado y la reescritura se realiza por medio de impulsos eléctricos. Al eliminar la necesidad de utilizar una técnica especial para dicho propósito, permite trabajar con mayor velocidad y comodidad, puesto que no es necesario retirar el chip del procesador para borrarlo y re-programarlo cuantas veces sea necesario. Actualmente es el tipo de memoria más común en los autómatas programables.
NVRAM (No-Volátil RAM)
Este tipo de módulo posee las características de un RAM, pero tiene la capacidad de retener los datos almacenados por un periodo determinado (una a varias semanas) sin necesidad de mantenerlo energizado. Generalmente contiene una batería, en el mismo encapsulado, que respalda los datos.
Otros
Existen otras variantes en los tipos de memoria, dado que es un componente clave en el PLC, es necesario observar de cerca que tipo de memoria, y sus características, tiene el PLC con que se trabaja.
Tabla 6 Tipos comunes de memoria electrónica, en CI de estado sólido.
I E S A U T Ó M A T A S P R O G R A M A B L E S
19
Sistemas Numéricos
Al trabajar con circuitos electrónicos se utilizan sistemas numéricos no comunes, tan efectivos como el decimal, para resolver problemas numéricamente. Es base de las ‘matemáticas por computadora’. Usamos el sistema binario para trabajar con dispositivos capaces de conmutar entre dos estados, además de el octal y hexadecimal. Se debe mencionar que es posible generar un sistema numérico utilizando como base cualquier cantidad entera positiva.
2.1 El sistema numérico decimal Los sistemas numéricos nos permiten representar cantidades y realizar operaciones aritméticas con ellas. El sistema numérico que usamos todos los días es el denominado “decimal”. Con éste nosotros somos capaces resolver cualquier problema aritmético. Al trabajar con circuitos electrónicos se hace uso de otros sistemas tan efectivos como el decimal y se utilizan para resolver problemas numéricamente. Revisemos el sistema numérico decimal con el que estamos plenamente familiarizados: Sabemos que para representar una cantidad cualquiera, podemos utilizar diez símbolos diferentes, estos son:
Capítulo
2
I E S A U T Ó M A T A S P R O G R A M A B L E S
20
9 8 7 6 5 4 3 2 1 0
Tabla 7 Símbolos utilizados para representar cantidades, utilizando el sistema numérico decimal.
Formalmente, a estos, se les conoce como Guarismos (son símbolos que representan cantidades). También se conoce, al sistema numérico decimal, como: sistema numérico de base diez; dado que se utilizan diez símbolos diferentes para representar cantidades. Así, para representar una cantidad entera, mayor que cero y menor o igual a 9 unidades o elementos, utilizamos el símbolo que corresponde. Por ejemplo:
Para representar la ausencia de elementos, utilizamos el símbolo:
0.
Para representar una cantidad equivalente a un elemento,
utilizamos el símbolo: 1.
Para representar una cantidad, que equivale a dos elementos,
utilizamos el símbolo: 2.
. . . . . .
Para representar la cantidad de nueve elementos, utilizamos el símbolo:
9.
Para representar cantidades mayores que nueve elementos
utilizamos combinaciones de dichos símbolos
Tabla 8 Significado de los símbolos, individuales, del sistema numérico decimal.
En sistema numérico decimal, cualquier cantidad, por muy grande o pequeña que sea, se puede representar como una combinación de estos símbolos. Sin embargo, para representar cantidades menores a la unidad, es necesario hacer uso del punto decimal.
Para representar una cantidad equivalente a diez elementos, utilizamos la combinación de los primeros dos símbolos, esto es: combinamos 0 y 1. Pero para que estos dos números representen la cantidad que se desea, es necesario ordenarlos de la manera apropiada.
Así, los números 0 y 1 no representan la misma cantidad si se colocan arbitrariamente,
I E S A U T Ó M A T A S P R O G R A M A B L E S
21
como ejemplo, los siguientes:
Caso 1.- Los números 0 y 1 ordenados de esta manera:10.
Caso 2.- Los números 0 y 1 ordenados de esta manera:01. Tabla 9 Importancia de la posición asignada a cada símbolo.
Como se sabe, los casos anteriores representan cantidades distintas. Esto es porque los guarismos se ordenan de acuerdo a un valor de posición para que sea posible trabajar exitosamente en el sistema numérico decimal.
En éste sistema, la primera posición de la derecha tiene un valor de posición de 10º (la base del sistema numérico elevada a la potencia cero), esto equivale a una unidad.
La segunda posición de la derecha tiene un valor de posición de 10¹ (la base del sistema numérico elevada a la potencia uno), esto equivale a diez unidades (10) multiplicado por sí mismo una vez.
. . .
En el sistema numérico decimal la enésima posición hacia la derecha tiene un valor de posición de 10^(n-1) (la base del sistema numérico elevada a la potencia enésima menos uno, esto equivale a diez unidades (10 multiplicado por sí mismo ‘n’ veces).
10^(n-1) = 10 x 10 x 10 x … x 10, (n-1 veces) siendo n el número de posiciones pre-establecido
Tabla 10 Definición del valor de posición en el sistema numérico decimal.
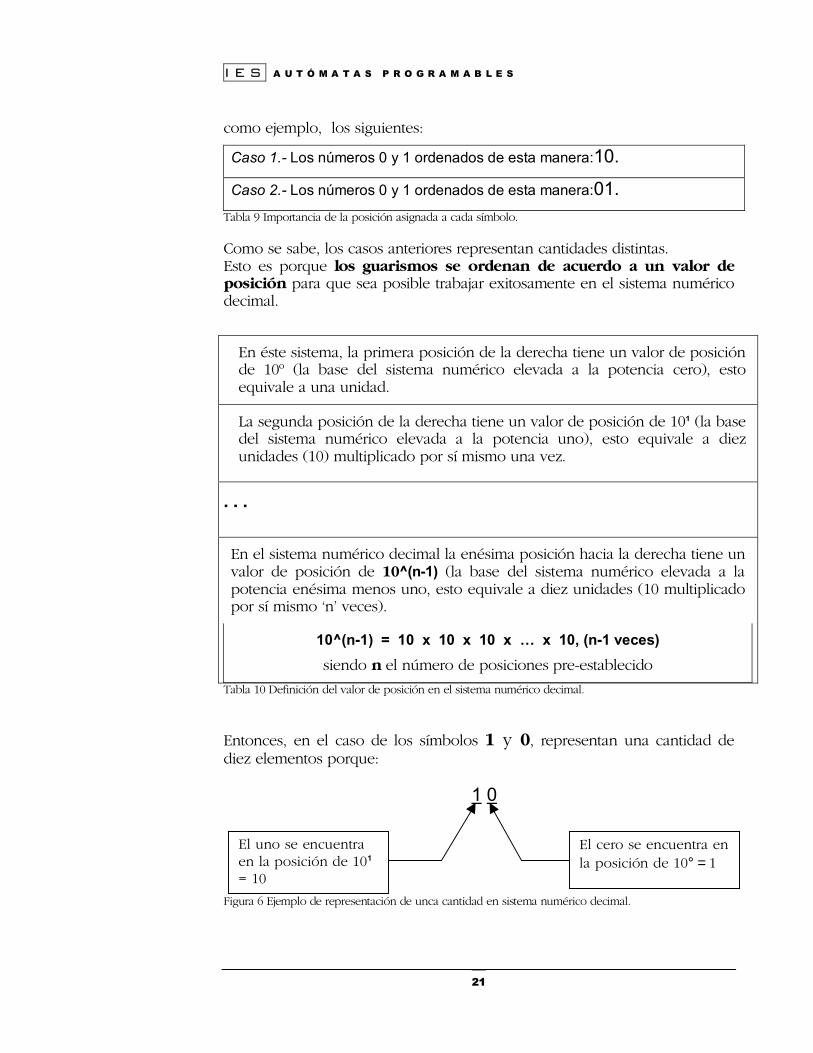
Entonces, en el caso de los símbolos 1 y 0, representan una cantidad de diez elementos porque:
1 0
Figura 6 Ejemplo de representación de unca cantidad en sistema numérico decimal.
El cero se encuentra en la posición de 10° = 1
El uno se encuentra en la posición de 10¹ = 10
I E S A U T Ó M A T A S P R O G R A M A B L E S
22
El cero, multiplicado por el valor de su posición: 0 x 1 = 0 El uno, multiplicado por el valor de su posición: 1 x 10 = 10.
Si sumamos los resultados de tales productos, tenemos la notación
desarrollada para dicha cantidad:
0 + 10 = 10.
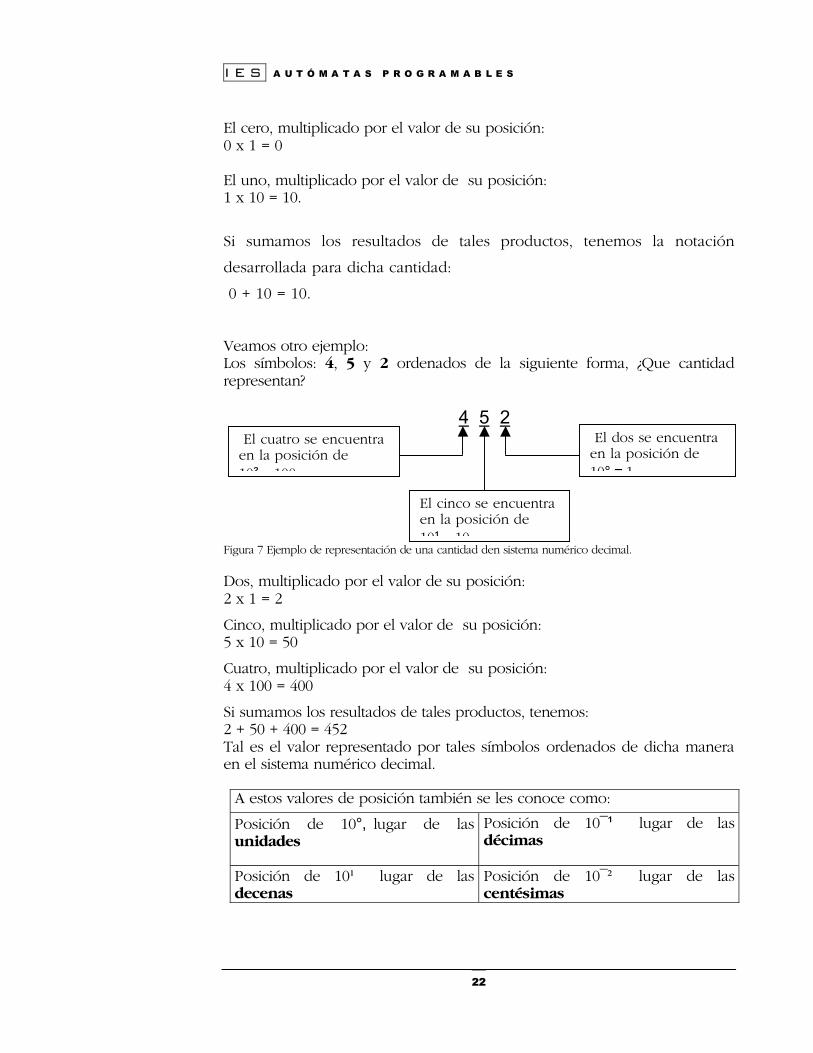
Veamos otro ejemplo: Los símbolos: 4, 5 y 2 ordenados de la siguiente forma, ¿Que cantidad representan?
4 5 2
Figura 7 Ejemplo de representación de una cantidad den sistema numérico decimal.
Dos, multiplicado por el valor de su posición: 2 x 1 = 2
Cinco, multiplicado por el valor de su posición: 5 x 10 = 50
Cuatro, multiplicado por el valor de su posición: 4 x 100 = 400
Si sumamos los resultados de tales productos, tenemos: 2 + 50 + 400 = 452 Tal es el valor representado por tales símbolos ordenados de dicha manera en el sistema numérico decimal.
A estos valores de posición también se les conoce como:
Posición de 10°, lugar de las unidades
Posición de 10¯¹ lugar de las décimas
Posición de 10¹ lugar de las decenas
Posición de 10¯² lugar de las centésimas
El dos se encuentra en la posición de 10° = 1
El cinco se encuentra en la posición de 10¹ 10
El cuatro se encuentra en la posición de 10² 100
I E S A U T Ó M A T A S P R O G R A M A B L E S
23
Posición de 10² lugar de las centenas
Posición de 10¯³ lugar de las milésimas
...sucesivamente, hasta la [n] posición.
...sucesivamente, hasta la [n] posición.
Tabla 11 Denominación clásica de las posiciones en el sistema numérico decimal.
Valor de las posiciones en el sistema numérico decimal: [Punto decimal]
X X X X X X X . X X X X n 5 4 3 2 1 0 -1 -2 -3 -n
10 . . . 10 10 10 10 10 10 10 10 10 . . . 10 n . . . CM DM UM C D U d c m n Donde X puede tomar valores de 0 a 9, en cada una de las posiciónes.
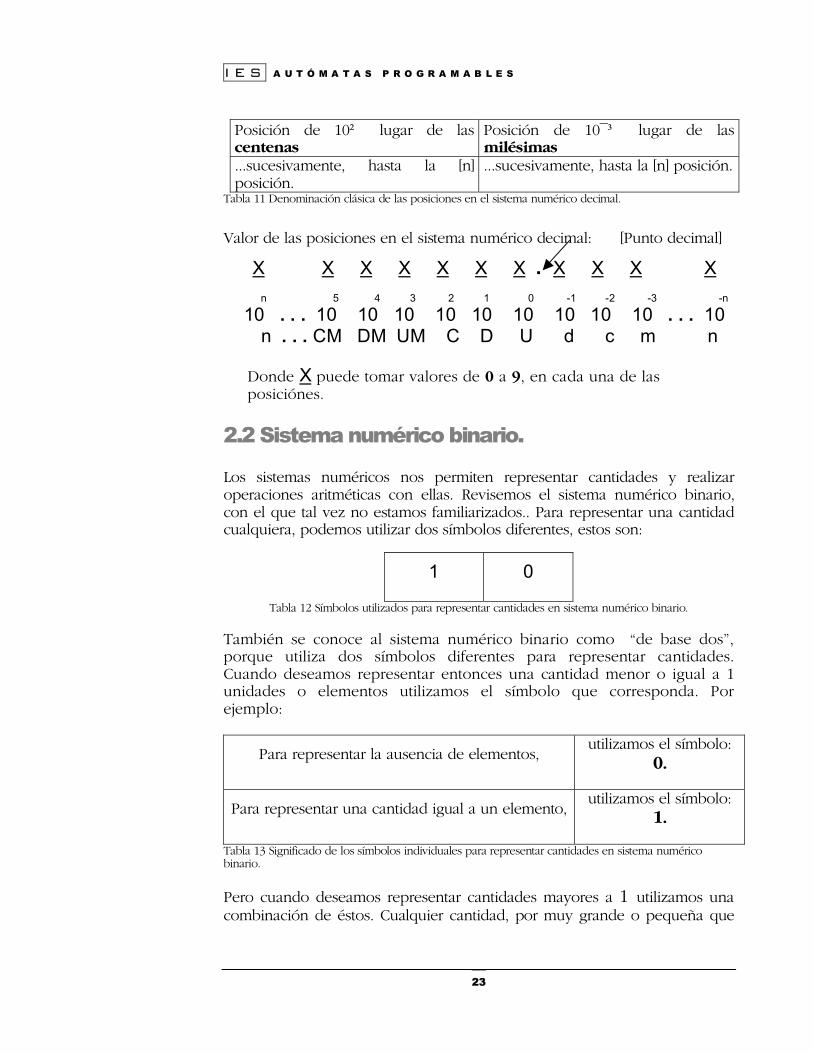
2.2 Sistema numérico binario.
Los sistemas numéricos nos permiten representar cantidades y realizar operaciones aritméticas con ellas. Revisemos el sistema numérico binario, con el que tal vez no estamos familiarizados.. Para representar una cantidad cualquiera, podemos utilizar dos símbolos diferentes, estos son:
1 0
Tabla 12 Símbolos utilizados para representar cantidades en sistema numérico binario.
También se conoce al sistema numérico binario como “de base dos”, porque utiliza dos símbolos diferentes para representar cantidades. Cuando deseamos representar entonces una cantidad menor o igual a 1 unidades o elementos utilizamos el símbolo que corresponda. Por ejemplo:
Para representar la ausencia de elementos, utilizamos el símbolo:
0.
Para representar una cantidad igual a un elemento,utilizamos el símbolo:
1.
Tabla 13 Significado de los símbolos individuales para representar cantidades en sistema numérico binario.
Pero cuando deseamos representar cantidades mayores a 1 utilizamos una combinación de éstos. Cualquier cantidad, por muy grande o pequeña que
I E S A U T Ó M A T A S P R O G R A M A B L E S
24
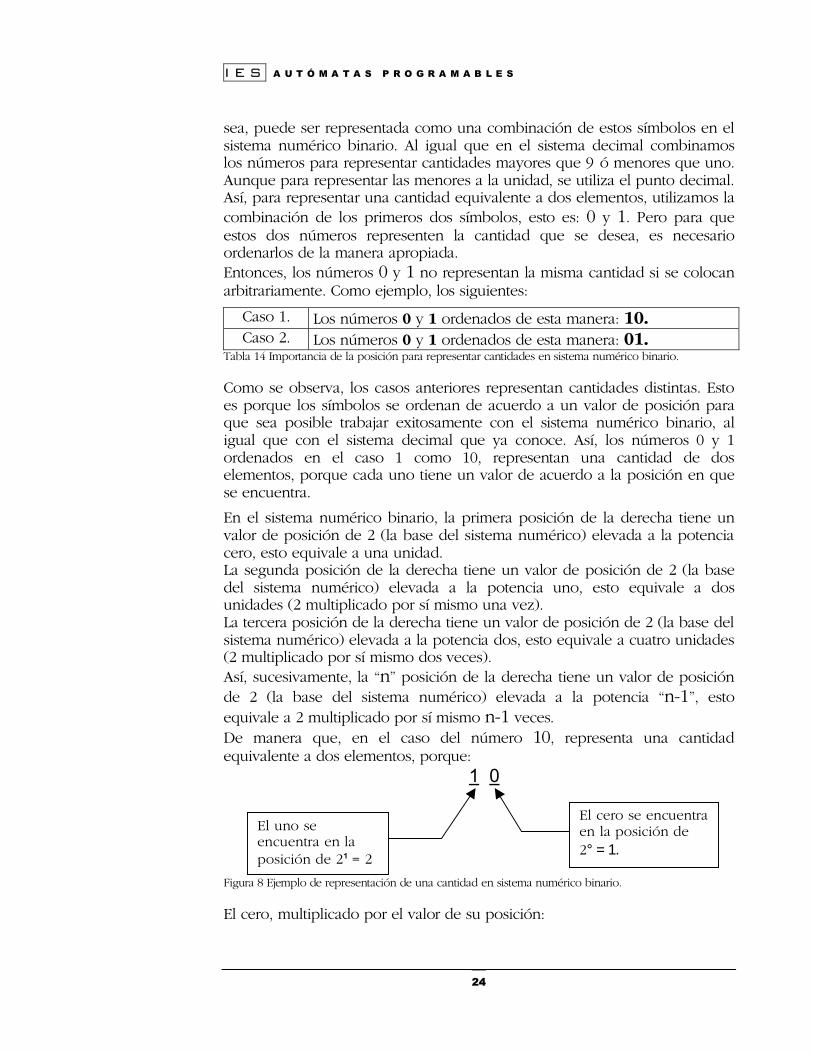
sea, puede ser representada como una combinación de estos símbolos en el sistema numérico binario. Al igual que en el sistema decimal combinamos los números para representar cantidades mayores que 9 ó menores que uno. Aunque para representar las menores a la unidad, se utiliza el punto decimal. Así, para representar una cantidad equivalente a dos elementos, utilizamos la combinación de los primeros dos símbolos, esto es: 0 y 1. Pero para que estos dos números representen la cantidad que se desea, es necesario ordenarlos de la manera apropiada. Entonces, los números 0 y 1 no representan la misma cantidad si se colocan arbitrariamente. Como ejemplo, los siguientes:
Caso 1. Los números 0 y 1 ordenados de esta manera: 10. Caso 2. Los números 0 y 1 ordenados de esta manera: 01.
Tabla 14 Importancia de la posición para representar cantidades en sistema numérico binario.
Como se observa, los casos anteriores representan cantidades distintas. Esto es porque los símbolos se ordenan de acuerdo a un valor de posición para que sea posible trabajar exitosamente con el sistema numérico binario, al igual que con el sistema decimal que ya conoce. Así, los números 0 y 1 ordenados en el caso 1 como 10, representan una cantidad de dos elementos, porque cada uno tiene un valor de acuerdo a la posición en que se encuentra.
En el sistema numérico binario, la primera posición de la derecha tiene un valor de posición de 2 (la base del sistema numérico) elevada a la potencia cero, esto equivale a una unidad. La segunda posición de la derecha tiene un valor de posición de 2 (la base del sistema numérico) elevada a la potencia uno, esto equivale a dos unidades (2 multiplicado por sí mismo una vez). La tercera posición de la derecha tiene un valor de posición de 2 (la base del sistema numérico) elevada a la potencia dos, esto equivale a cuatro unidades (2 multiplicado por sí mismo dos veces). Así, sucesivamente, la “n” posición de la derecha tiene un valor de posición de 2 (la base del sistema numérico) elevada a la potencia “n-1”, esto equivale a 2 multiplicado por sí mismo n-1 veces. De manera que, en el caso del número 10, representa una cantidad equivalente a dos elementos, porque:
1 0
Figura 8 Ejemplo de representación de una cantidad en sistema numérico binario.
El cero, multiplicado por el valor de su posición:
El cero se encuentra en la posición de 2° = 1.
El uno se encuentra en la posición de 2¹ = 2
I E S A U T Ó M A T A S P R O G R A M A B L E S
25
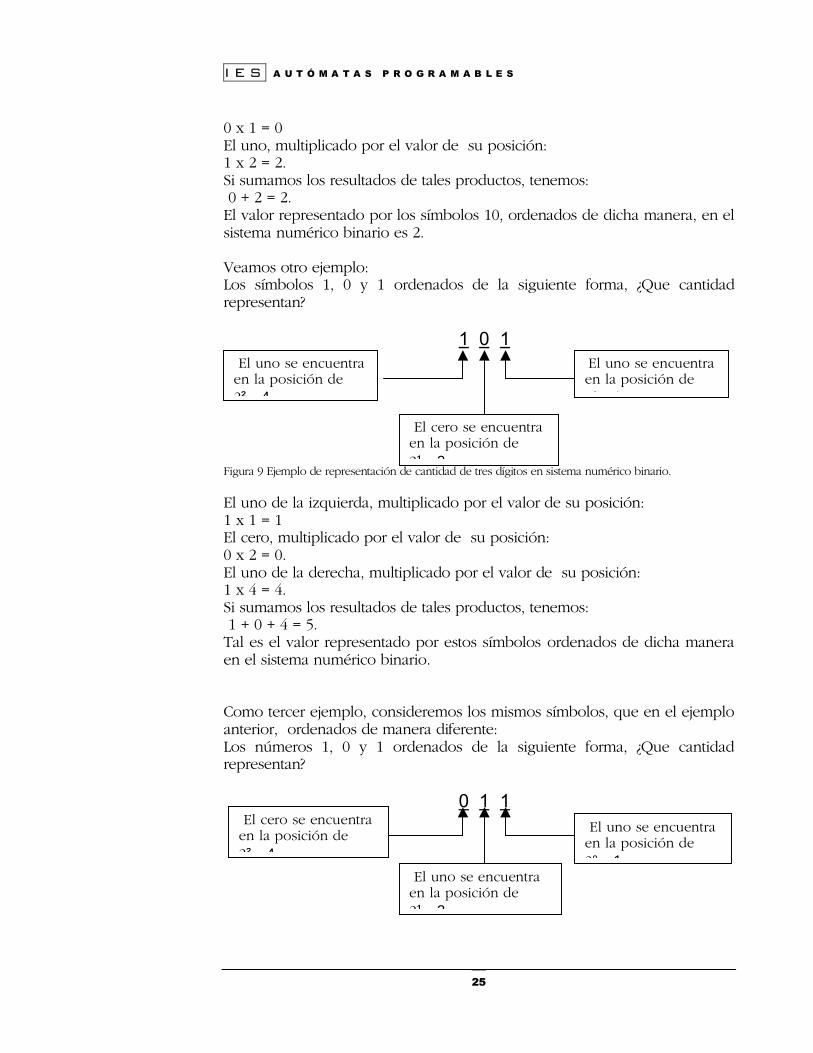
0 x 1 = 0 El uno, multiplicado por el valor de su posición: 1 x 2 = 2. Si sumamos los resultados de tales productos, tenemos: 0 + 2 = 2. El valor representado por los símbolos 10, ordenados de dicha manera, en el sistema numérico binario es 2. Veamos otro ejemplo: Los símbolos 1, 0 y 1 ordenados de la siguiente forma, ¿Que cantidad representan?
1 0 1
Figura 9 Ejemplo de representación de cantidad de tres dígitos en sistema numérico binario.
El uno de la izquierda, multiplicado por el valor de su posición: 1 x 1 = 1 El cero, multiplicado por el valor de su posición: 0 x 2 = 0. El uno de la derecha, multiplicado por el valor de su posición: 1 x 4 = 4. Si sumamos los resultados de tales productos, tenemos: 1 + 0 + 4 = 5. Tal es el valor representado por estos símbolos ordenados de dicha manera en el sistema numérico binario. Como tercer ejemplo, consideremos los mismos símbolos, que en el ejemplo anterior, ordenados de manera diferente: Los números 1, 0 y 1 ordenados de la siguiente forma, ¿Que cantidad representan?
0 1 1
El uno se encuentra en la posición de ° 1
El cero se encuentra en la posición de 2¹ 2
El uno se encuentra en la posición de 2² 4
El uno se encuentra en la posición de 2° 1
El uno se encuentra en la posición de 2¹ 2
El cero se encuentra en la posición de 2² 4
I E S A U T Ó M A T A S P R O G R A M A B L E S
26
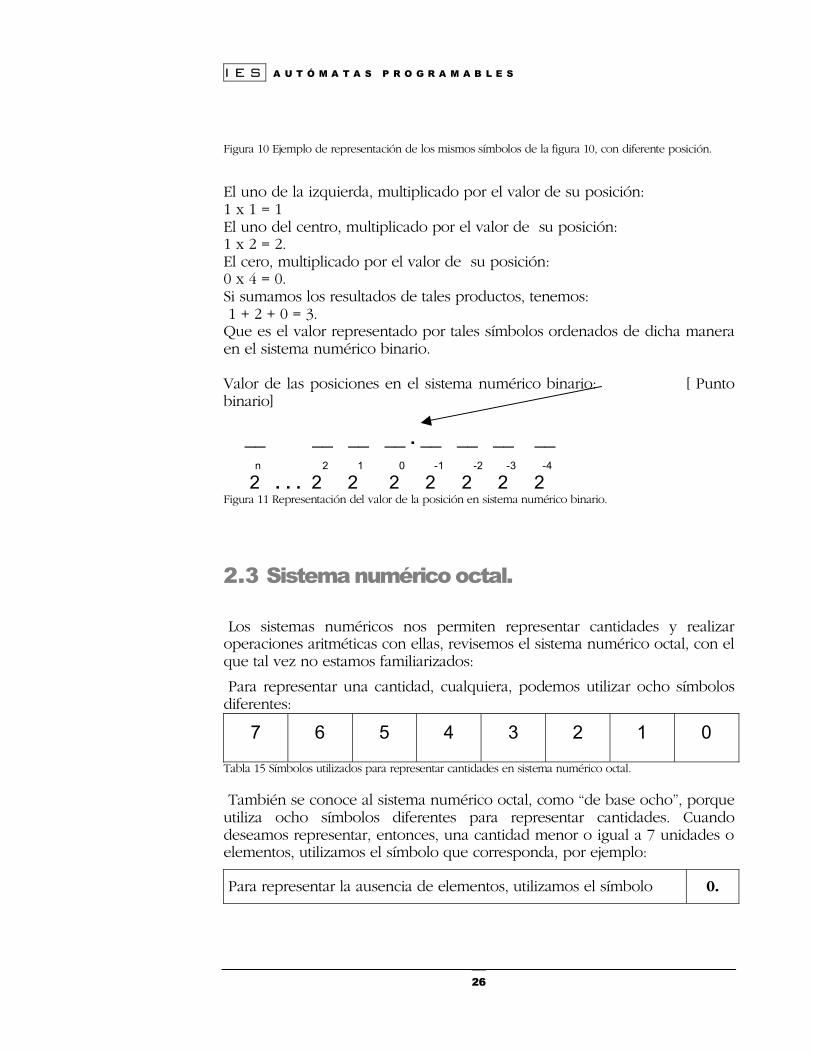
Figura 10 Ejemplo de representación de los mismos símbolos de la figura 10, con diferente posición.
El uno de la izquierda, multiplicado por el valor de su posición: 1 x 1 = 1 El uno del centro, multiplicado por el valor de su posición: 1 x 2 = 2. El cero, multiplicado por el valor de su posición: 0 x 4 = 0. Si sumamos los resultados de tales productos, tenemos: 1 + 2 + 0 = 3. Que es el valor representado por tales símbolos ordenados de dicha manera en el sistema numérico binario. Valor de las posiciones en el sistema numérico binario: [ Punto binario]
__ __ __ __ . __ __ __ __ n 2 1 0 -1 -2 -3 -4
2 . . . 2 2 2 2 2 2 2 Figura 11 Representación del valor de la posición en sistema numérico binario.
2.3 Sistema numérico octal.
Los sistemas numéricos nos permiten representar cantidades y realizar operaciones aritméticas con ellas, revisemos el sistema numérico octal, con el que tal vez no estamos familiarizados:
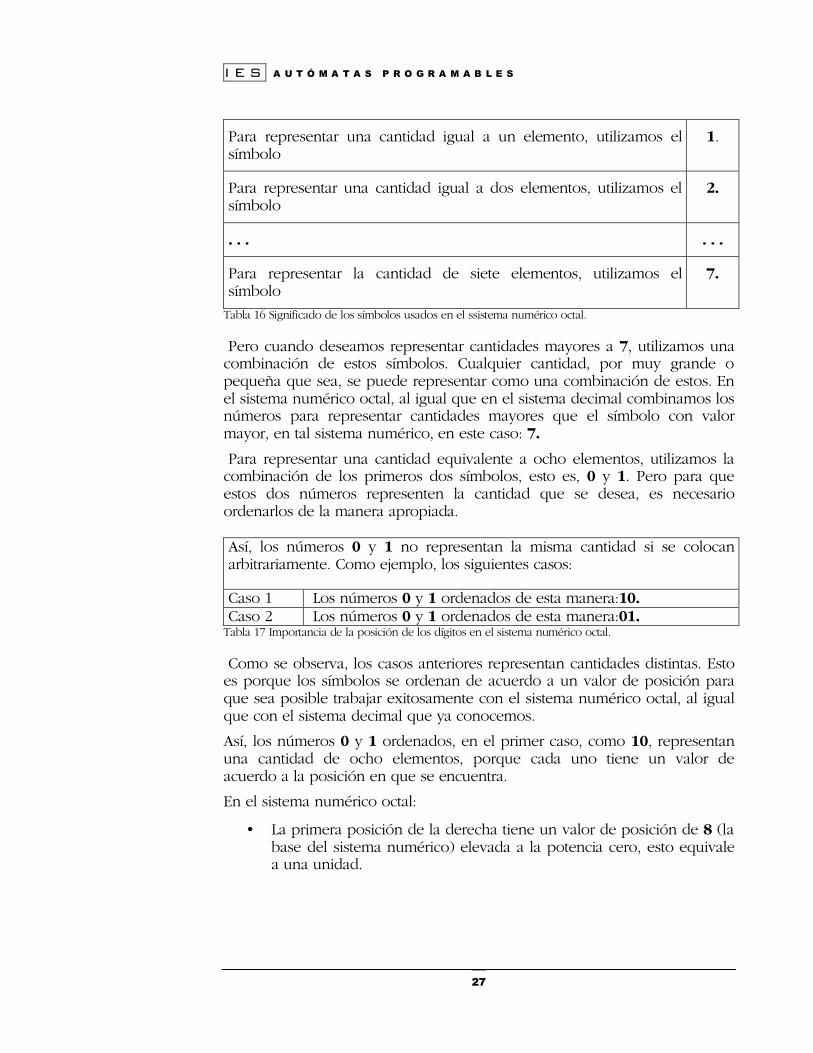
Para representar una cantidad, cualquiera, podemos utilizar ocho símbolos diferentes:
7 6 5 4 3 2 1 0
Tabla 15 Símbolos utilizados para representar cantidades en sistema numérico octal.
También se conoce al sistema numérico octal, como “de base ocho”, porque utiliza ocho símbolos diferentes para representar cantidades. Cuando deseamos representar, entonces, una cantidad menor o igual a 7 unidades o elementos, utilizamos el símbolo que corresponda, por ejemplo:
Para representar la ausencia de elementos, utilizamos el símbolo 0.
I E S A U T Ó M A T A S P R O G R A M A B L E S
27
Para representar una cantidad igual a un elemento, utilizamos el símbolo
1.
Para representar una cantidad igual a dos elementos, utilizamos el símbolo
2.
. . . . . .
Para representar la cantidad de siete elementos, utilizamos el símbolo
7.
Tabla 16 Significado de los símbolos usados en el ssistema numérico octal.
Pero cuando deseamos representar cantidades mayores a 7, utilizamos una combinación de estos símbolos. Cualquier cantidad, por muy grande o pequeña que sea, se puede representar como una combinación de estos. En el sistema numérico octal, al igual que en el sistema decimal combinamos los números para representar cantidades mayores que el símbolo con valor mayor, en tal sistema numérico, en este caso: 7.
Para representar una cantidad equivalente a ocho elementos, utilizamos la combinación de los primeros dos símbolos, esto es, 0 y 1. Pero para que estos dos números representen la cantidad que se desea, es necesario ordenarlos de la manera apropiada. Así, los números 0 y 1 no representan la misma cantidad si se colocan arbitrariamente. Como ejemplo, los siguientes casos:
Caso 1 Los números 0 y 1 ordenados de esta manera:10. Caso 2 Los números 0 y 1 ordenados de esta manera:01.
Tabla 17 Importancia de la posición de los dígitos en el sistema numérico octal.
Como se observa, los casos anteriores representan cantidades distintas. Esto es porque los símbolos se ordenan de acuerdo a un valor de posición para que sea posible trabajar exitosamente con el sistema numérico octal, al igual que con el sistema decimal que ya conocemos.
Así, los números 0 y 1 ordenados, en el primer caso, como 10, representan una cantidad de ocho elementos, porque cada uno tiene un valor de acuerdo a la posición en que se encuentra.
En el sistema numérico octal:
• La primera posición de la derecha tiene un valor de posición de 8 (la base del sistema numérico) elevada a la potencia cero, esto equivale a una unidad.
I E S A U T Ó M A T A S P R O G R A M A B L E S
28
• La segunda posición de la derecha tiene un valor de posición de 8 (la base del sistema numérico) elevada a la potencia uno, esto equivale a ocho unidades (8 multiplicado por sí mismo una vez).
• La tercera posición de la derecha tiene un valor de posición de 8 (la base del sistema numérico) elevada a la potencia dos, esto equivale a sesenta y cuatro unidades (8 multiplicado por sí mismo dos veces).
• ...La “n” posición de la derecha tiene un valor de posición de 8 (la base del sistema numérico) elevada a la potencia “n-1”, esto equivale a 8 multiplicado por sí mismo n-1 veces.
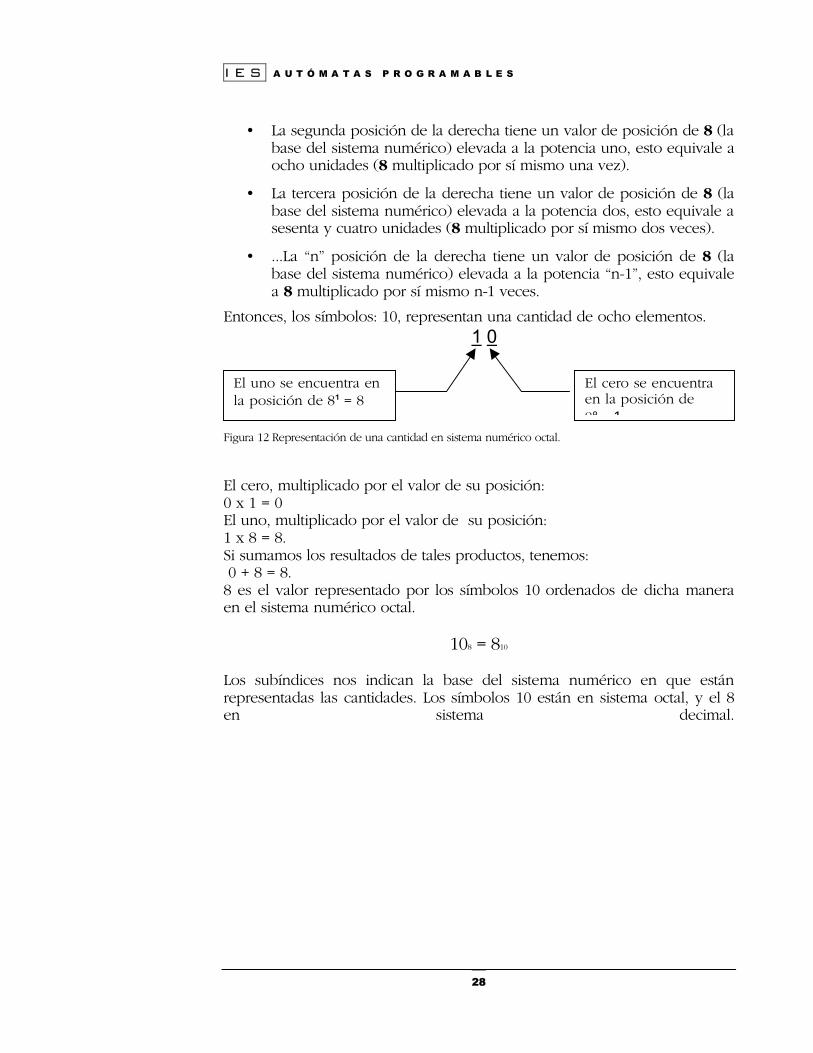
Entonces, los símbolos: 10, representan una cantidad de ocho elementos. 1 0
Figura 12 Representación de una cantidad en sistema numérico octal.
El cero, multiplicado por el valor de su posición: 0 x 1 = 0 El uno, multiplicado por el valor de su posición: 1 x 8 = 8. Si sumamos los resultados de tales productos, tenemos: 0 + 8 = 8. 8 es el valor representado por los símbolos 10 ordenados de dicha manera en el sistema numérico octal.
108 = 810 Los subíndices nos indican la base del sistema numérico en que están representadas las cantidades. Los símbolos 10 están en sistema octal, y el 8 en sistema decimal.
El cero se encuentra en la posición de 8° 1
El uno se encuentra en la posición de 8¹ = 8
I E S A U T Ó M A T A S P R O G R A M A B L E S
29
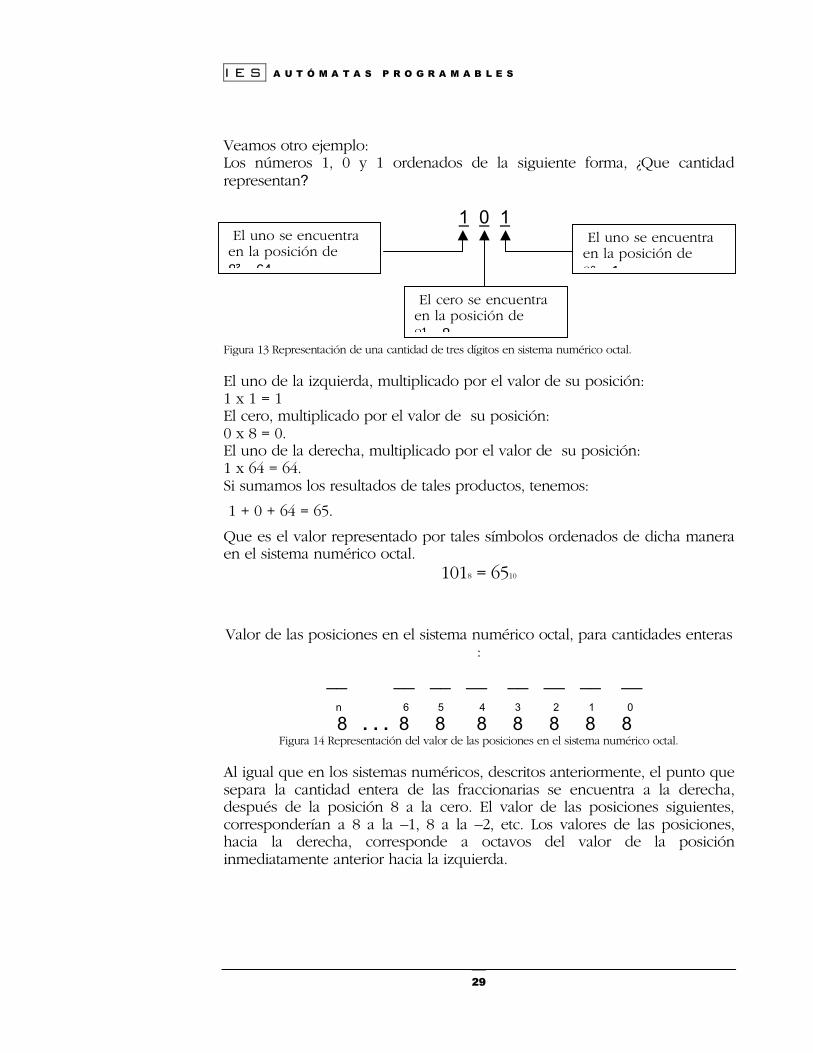
Veamos otro ejemplo: Los números 1, 0 y 1 ordenados de la siguiente forma, ¿Que cantidad representan?
1 0 1
Figura 13 Representación de una cantidad de tres dígitos en sistema numérico octal.
El uno de la izquierda, multiplicado por el valor de su posición: 1 x 1 = 1 El cero, multiplicado por el valor de su posición: 0 x 8 = 0. El uno de la derecha, multiplicado por el valor de su posición: 1 x 64 = 64. Si sumamos los resultados de tales productos, tenemos:
1 + 0 + 64 = 65.
Que es el valor representado por tales símbolos ordenados de dicha manera en el sistema numérico octal.
1018 = 6510
Valor de las posiciones en el sistema numérico octal, para cantidades enteras :
__ __ __ __ __ __ __ __ n 6 5 4 3 2 1 0
8 . . . 8 8 8 8 8 8 8 Figura 14 Representación del valor de las posiciones en el sistema numérico octal.
Al igual que en los sistemas numéricos, descritos anteriormente, el punto que separa la cantidad entera de las fraccionarias se encuentra a la derecha, después de la posición 8 a la cero. El valor de las posiciones siguientes, corresponderían a 8 a la –1, 8 a la –2, etc. Los valores de las posiciones, hacia la derecha, corresponde a octavos del valor de la posición inmediatamente anterior hacia la izquierda.
El uno se encuentra en la posición de 8° 1
El cero se encuentra en la posición de 8¹ 8
El uno se encuentra en la posición de 8² 64
I E S A U T Ó M A T A S P R O G R A M A B L E S
30
2.4 Sistema numérico hexadecimal.
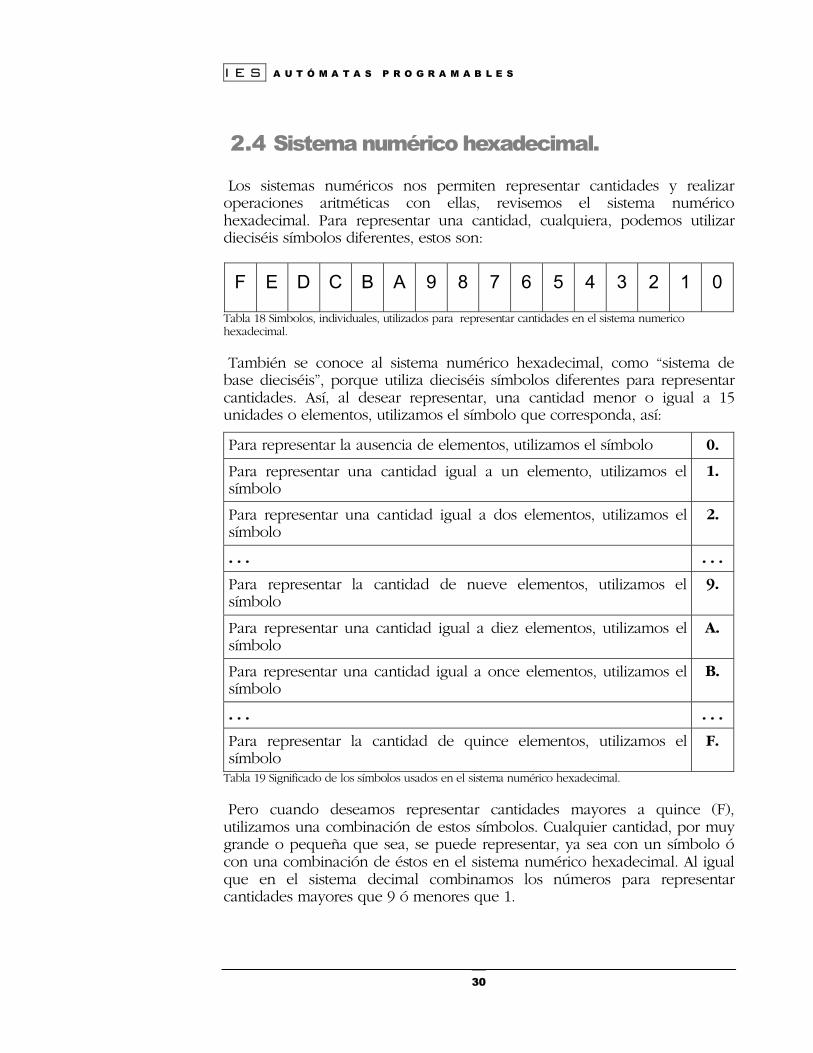
Los sistemas numéricos nos permiten representar cantidades y realizar operaciones aritméticas con ellas, revisemos el sistema numérico hexadecimal. Para representar una cantidad, cualquiera, podemos utilizar dieciséis símbolos diferentes, estos son:
F E D C B A 9 8 7 6 5 4 3 2 1 0
Tabla 18 Simbolos, individuales, utilizados para representar cantidades en el sistema numerico hexadecimal.
También se conoce al sistema numérico hexadecimal, como “sistema de base dieciséis”, porque utiliza dieciséis símbolos diferentes para representar cantidades. Así, al desear representar, una cantidad menor o igual a 15 unidades o elementos, utilizamos el símbolo que corresponda, así:
Para representar la ausencia de elementos, utilizamos el símbolo 0.
Para representar una cantidad igual a un elemento, utilizamos el símbolo
1.
Para representar una cantidad igual a dos elementos, utilizamos el símbolo
2.
. . . . . .
Para representar la cantidad de nueve elementos, utilizamos el símbolo
9.
Para representar una cantidad igual a diez elementos, utilizamos el símbolo
A.
Para representar una cantidad igual a once elementos, utilizamos el símbolo
B.
. . . . . .
Para representar la cantidad de quince elementos, utilizamos el símbolo
F.
Tabla 19 Significado de los símbolos usados en el sistema numérico hexadecimal.
Pero cuando deseamos representar cantidades mayores a quince (F), utilizamos una combinación de estos símbolos. Cualquier cantidad, por muy grande o pequeña que sea, se puede representar, ya sea con un símbolo ó con una combinación de éstos en el sistema numérico hexadecimal. Al igual que en el sistema decimal combinamos los números para representar cantidades mayores que 9 ó menores que 1.
I E S A U T Ó M A T A S P R O G R A M A B L E S
31
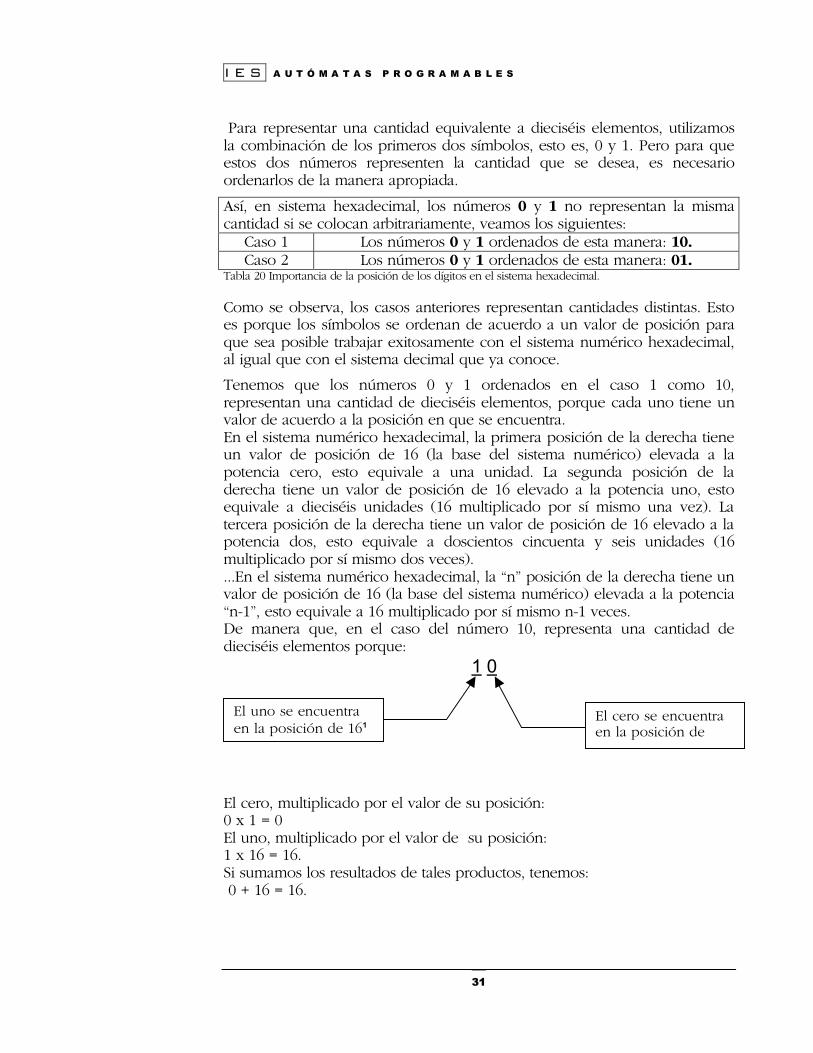
Para representar una cantidad equivalente a dieciséis elementos, utilizamos la combinación de los primeros dos símbolos, esto es, 0 y 1. Pero para que estos dos números representen la cantidad que se desea, es necesario ordenarlos de la manera apropiada.
Así, en sistema hexadecimal, los números 0 y 1 no representan la misma cantidad si se colocan arbitrariamente, veamos los siguientes:
Caso 1 Los números 0 y 1 ordenados de esta manera: 10. Caso 2 Los números 0 y 1 ordenados de esta manera: 01.
Tabla 20 Importancia de la posición de los dígitos en el sistema hexadecimal.
Como se observa, los casos anteriores representan cantidades distintas. Esto es porque los símbolos se ordenan de acuerdo a un valor de posición para que sea posible trabajar exitosamente con el sistema numérico hexadecimal, al igual que con el sistema decimal que ya conoce.
Tenemos que los números 0 y 1 ordenados en el caso 1 como 10, representan una cantidad de dieciséis elementos, porque cada uno tiene un valor de acuerdo a la posición en que se encuentra. En el sistema numérico hexadecimal, la primera posición de la derecha tiene un valor de posición de 16 (la base del sistema numérico) elevada a la potencia cero, esto equivale a una unidad. La segunda posición de la derecha tiene un valor de posición de 16 elevado a la potencia uno, esto equivale a dieciséis unidades (16 multiplicado por sí mismo una vez). La tercera posición de la derecha tiene un valor de posición de 16 elevado a la potencia dos, esto equivale a doscientos cincuenta y seis unidades (16 multiplicado por sí mismo dos veces). ...En el sistema numérico hexadecimal, la “n” posición de la derecha tiene un valor de posición de 16 (la base del sistema numérico) elevada a la potencia “n-1”, esto equivale a 16 multiplicado por sí mismo n-1 veces. De manera que, en el caso del número 10, representa una cantidad de dieciséis elementos porque:
1 0
El cero, multiplicado por el valor de su posición: 0 x 1 = 0 El uno, multiplicado por el valor de su posición: 1 x 16 = 16. Si sumamos los resultados de tales productos, tenemos: 0 + 16 = 16.
El cero se encuentra en la posición de
El uno se encuentra en la posición de 16¹

I E S A U T Ó M A T A S P R O G R A M A B L E S
32
Que es el valor representado por tales símbolos ordenados de dicha manera en el sistema numérico hexadecimal. El subíndice usado para indicar el sistema hexadecimal, puede ser un 16 o una H.
1016 = 10H = 1610
I E S A U T Ó M A T A S P R O G R A M A B L E S
33
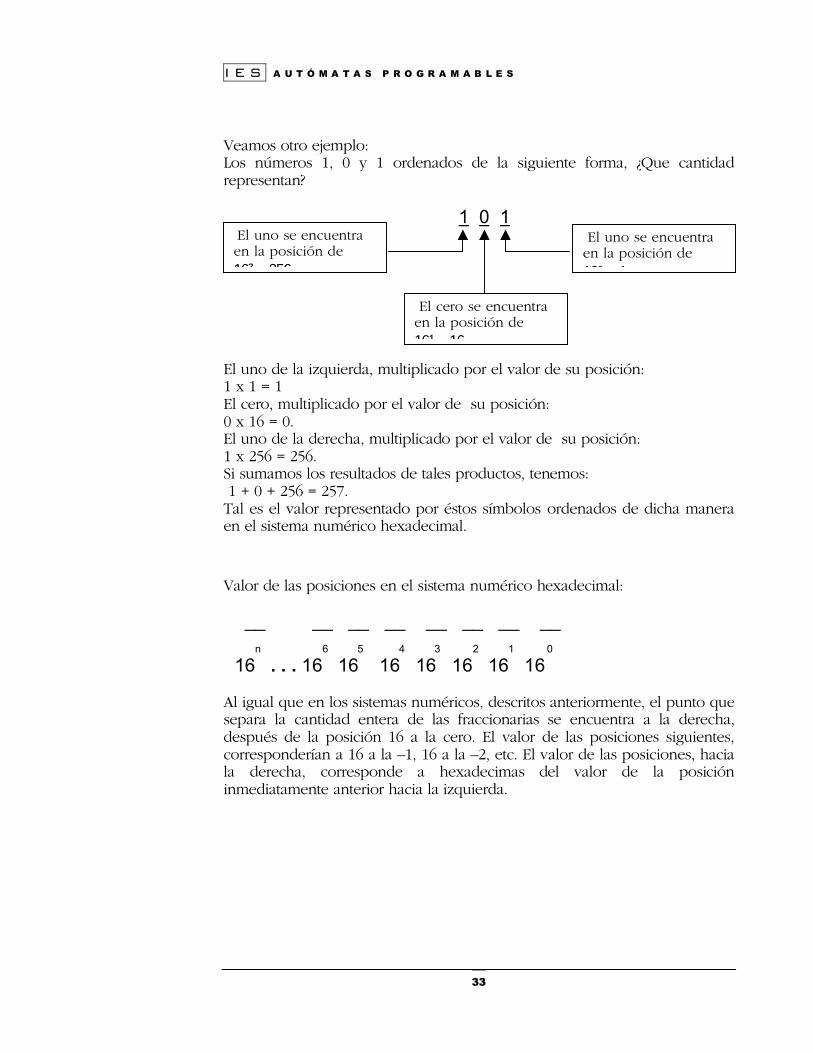
Veamos otro ejemplo: Los números 1, 0 y 1 ordenados de la siguiente forma, ¿Que cantidad representan?
1 0 1
El uno de la izquierda, multiplicado por el valor de su posición: 1 x 1 = 1 El cero, multiplicado por el valor de su posición: 0 x 16 = 0. El uno de la derecha, multiplicado por el valor de su posición: 1 x 256 = 256. Si sumamos los resultados de tales productos, tenemos: 1 + 0 + 256 = 257. Tal es el valor representado por éstos símbolos ordenados de dicha manera en el sistema numérico hexadecimal.
Valor de las posiciones en el sistema numérico hexadecimal:
__ __ __ __ __ __ __ __ n 6 5 4 3 2 1 0
16 . . . 16 16 16 16 16 16 16 Al igual que en los sistemas numéricos, descritos anteriormente, el punto que separa la cantidad entera de las fraccionarias se encuentra a la derecha, después de la posición 16 a la cero. El valor de las posiciones siguientes, corresponderían a 16 a la –1, 16 a la –2, etc. El valor de las posiciones, hacia la derecha, corresponde a hexadecimas del valor de la posición inmediatamente anterior hacia la izquierda.
El uno se encuentra en la posición de 16° 1
El cero se encuentra en la posición de 16¹ 16
El uno se encuentra en la posición de 16² 256
I E S A U T Ó M A T A S P R O G R A M A B L E S
34
2.5 Códigos binarios Para manipular la información, muchas ocasiones es conveniente codificarla. Las razones para dicha codificación pueden ser diversas, pero en resumen se puede afirmar que permiten hacer más eficiente al sistema con que se esté trabajando, utilizando menor cantidad de recursos para desarrollar una tarea específica. Razonado esto, se visualizará que puede existir, entonces, una gran cantidad de diferentes formas posibles de codificación, y en efecto, así es. Afortunadamente para nosotros, las aplicaciones con PLC solamente involucran un conjunto reducido de códigos, y son estándares predefinidos. La razón y uso de cada uno de estos códigos se explica en esta sección.
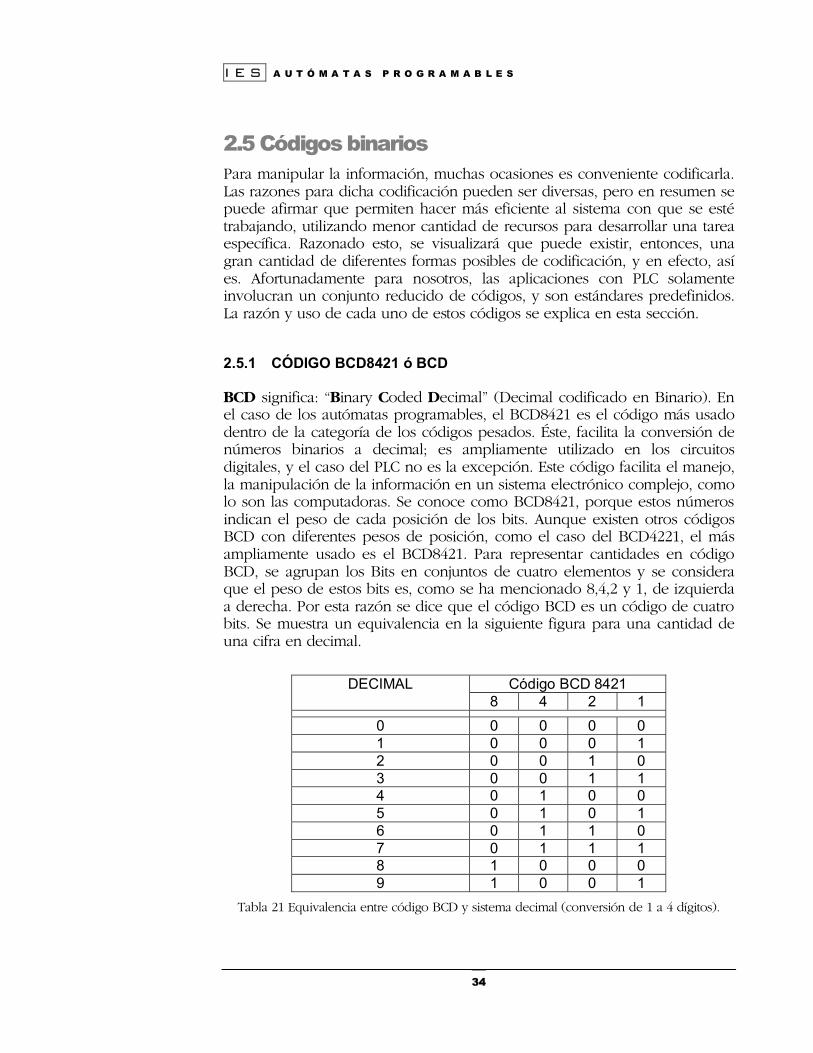
2.5.1 CÓDIGO BCD8421 ó BCD BCD significa: “Binary Coded Decimal” (Decimal codificado en Binario). En el caso de los autómatas programables, el BCD8421 es el código más usado dentro de la categoría de los códigos pesados. Éste, facilita la conversión de números binarios a decimal; es ampliamente utilizado en los circuitos digitales, y el caso del PLC no es la excepción. Este código facilita el manejo, la manipulación de la información en un sistema electrónico complejo, como lo son las computadoras. Se conoce como BCD8421, porque estos números indican el peso de cada posición de los bits. Aunque existen otros códigos BCD con diferentes pesos de posición, como el caso del BCD4221, el más ampliamente usado es el BCD8421. Para representar cantidades en código BCD, se agrupan los Bits en conjuntos de cuatro elementos y se considera que el peso de estos bits es, como se ha mencionado 8,4,2 y 1, de izquierda a derecha. Por esta razón se dice que el código BCD es un código de cuatro bits. Se muestra un equivalencia en la siguiente figura para una cantidad de una cifra en decimal.
Código BCD 8421 DECIMAL
8 4 2 1
0 0 0 0 0 1 0 0 0 1 2 0 0 1 0 3 0 0 1 1 4 0 1 0 0 5 0 1 0 1 6 0 1 1 0 7 0 1 1 1 8 1 0 0 0 9 1 0 0 1
Tabla 21 Equivalencia entre código BCD y sistema decimal (conversión de 1 a 4 dígitos).
I E S A U T Ó M A T A S P R O G R A M A B L E S
35
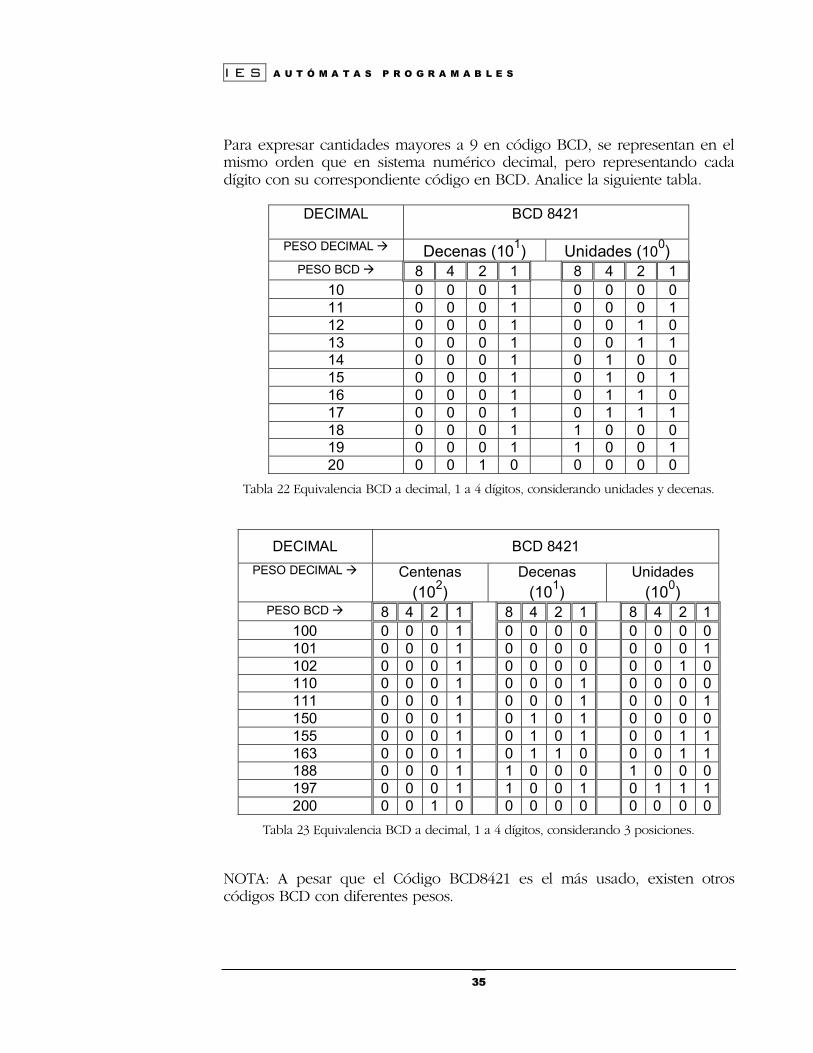
Para expresar cantidades mayores a 9 en código BCD, se representan en el mismo orden que en sistema numérico decimal, pero representando cada dígito con su correspondiente código en BCD. Analice la siguiente tabla.
DECIMAL
BCD 8421
PESO DECIMAL Decenas (101) Unidades (100) PESO BCD 8 4 2 1 8 4 2 1
10 0 0 0 1 0 0 0 0 11 0 0 0 1 0 0 0 1 12 0 0 0 1 0 0 1 0 13 0 0 0 1 0 0 1 1 14 0 0 0 1 0 1 0 0 15 0 0 0 1 0 1 0 1 16 0 0 0 1 0 1 1 0 17 0 0 0 1 0 1 1 1 18 0 0 0 1 1 0 0 0 19 0 0 0 1 1 0 0 1 20 0 0 1 0 0 0 0 0
Tabla 22 Equivalencia BCD a decimal, 1 a 4 dígitos, considerando unidades y decenas.
DECIMAL BCD 8421 PESO DECIMAL Centenas
(102) Decenas
(101) Unidades
(100) PESO BCD 8 4 2 1 8 4 2 1 8 4 2 1
100 0 0 0 1 0 0 0 0 0 0 0 0101 0 0 0 1 0 0 0 0 0 0 0 1102 0 0 0 1 0 0 0 0 0 0 1 0110 0 0 0 1 0 0 0 1 0 0 0 0111 0 0 0 1 0 0 0 1 0 0 0 1150 0 0 0 1 0 1 0 1 0 0 0 0155 0 0 0 1 0 1 0 1 0 0 1 1163 0 0 0 1 0 1 1 0 0 0 1 1188 0 0 0 1 1 0 0 0 1 0 0 0197 0 0 0 1 1 0 0 1 0 1 1 1200 0 0 1 0 0 0 0 0 0 0 0 0
Tabla 23 Equivalencia BCD a decimal, 1 a 4 dígitos, considerando 3 posiciones.
NOTA: A pesar que el Código BCD8421 es el más usado, existen otros códigos BCD con diferentes pesos.
I E S A U T Ó M A T A S P R O G R A M A B L E S
36
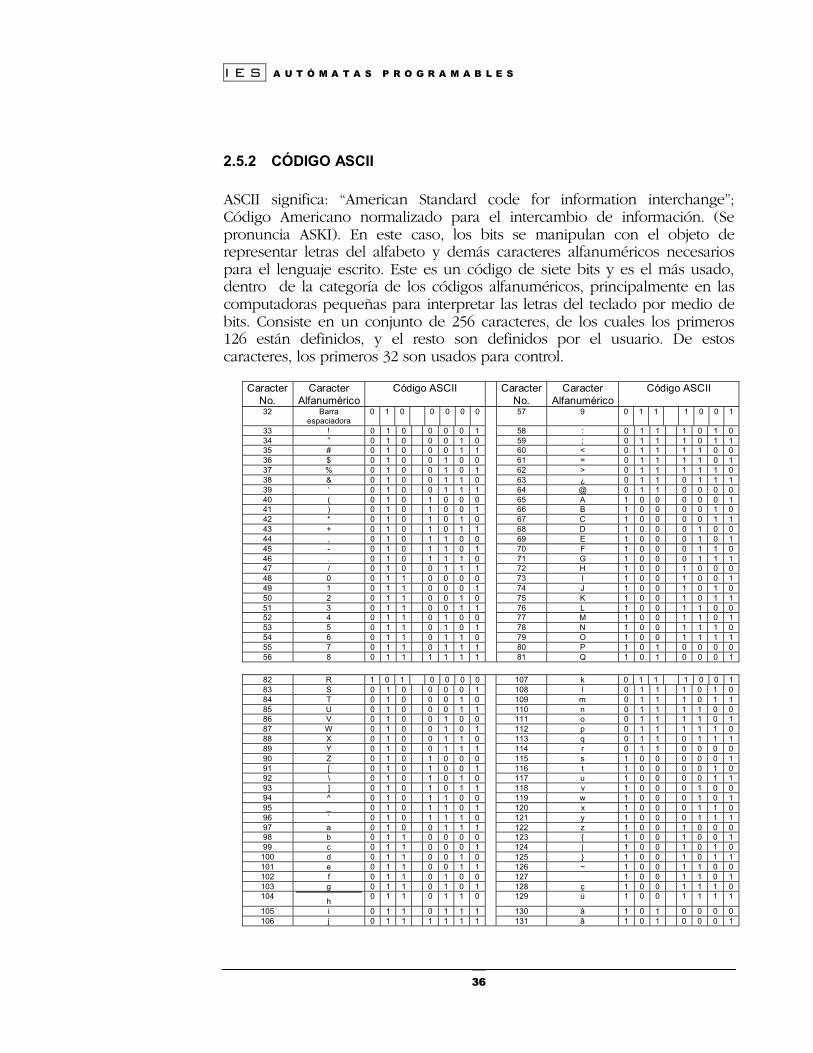
2.5.2 CÓDIGO ASCII ASCII significa: “American Standard code for information interchange”; Código Americano normalizado para el intercambio de información. (Se pronuncia ASKI). En este caso, los bits se manipulan con el objeto de representar letras del alfabeto y demás caracteres alfanuméricos necesarios para el lenguaje escrito. Este es un código de siete bits y es el más usado, dentro de la categoría de los códigos alfanuméricos, principalmente en las computadoras pequeñas para interpretar las letras del teclado por medio de bits. Consiste en un conjunto de 256 caracteres, de los cuales los primeros 126 están definidos, y el resto son definidos por el usuario. De estos caracteres, los primeros 32 son usados para control.
Caracter No.
Caracter Alfanumérico
Código ASCII CaracterNo.
Caracter Alfanumérico
Código ASCII
32 Barra espaciadora
0 1 0 0 0 0 0 57 9 0 1 1 1 0 0 1
33 ! 0 1 0 0 0 0 1 58 : 0 1 1 1 0 1 0 34 ” 0 1 0 0 0 1 0 59 ; 0 1 1 1 0 1 1 35 # 0 1 0 0 0 1 1 60 < 0 1 1 1 1 0 0 36 $ 0 1 0 0 1 0 0 61 = 0 1 1 1 1 0 1 37 % 0 1 0 0 1 0 1 62 > 0 1 1 1 1 1 0 38 & 0 1 0 0 1 1 0 63 ¿ 0 1 1 0 1 1 1 39 ‘ 0 1 0 0 1 1 1 64 @ 0 1 1 0 0 0 0 40 ( 0 1 0 1 0 0 0 65 A 1 0 0 0 0 0 1 41 ) 0 1 0 1 0 0 1 66 B 1 0 0 0 0 1 0 42 * 0 1 0 1 0 1 0 67 C 1 0 0 0 0 1 1 43 + 0 1 0 1 0 1 1 68 D 1 0 0 0 1 0 0 44 , 0 1 0 1 1 0 0 69 E 1 0 0 0 1 0 1 45 - 0 1 0 1 1 0 1 70 F 1 0 0 0 1 1 0 46 . 0 1 0 1 1 1 0 71 G 1 0 0 0 1 1 1 47 / 0 1 0 0 1 1 1 72 H 1 0 0 1 0 0 0 48 0 0 1 1 0 0 0 0 73 I 1 0 0 1 0 0 1 49 1 0 1 1 0 0 0 1 74 J 1 0 0 1 0 1 0 50 2 0 1 1 0 0 1 0 75 K 1 0 0 1 0 1 1 51 3 0 1 1 0 0 1 1 76 L 1 0 0 1 1 0 0 52 4 0 1 1 0 1 0 0 77 M 1 0 0 1 1 0 1 53 5 0 1 1 0 1 0 1 78 N 1 0 0 1 1 1 0 54 6 0 1 1 0 1 1 0 79 O 1 0 0 1 1 1 1 55 7 0 1 1 0 1 1 1 80 P 1 0 1 0 0 0 0 56 8 0 1 1 1 1 1 1
81 Q 1 0 1 0 0 0 1
82 R 1 0 1 0 0 0 0 107 k 0 1 1 1 0 0 1 83 S 0 1 0 0 0 0 1 108 l 0 1 1 1 0 1 0 84 T 0 1 0 0 0 1 0 109 m 0 1 1 1 0 1 1 85 U 0 1 0 0 0 1 1 110 n 0 1 1 1 1 0 0 86 V 0 1 0 0 1 0 0 111 o 0 1 1 1 1 0 1 87 W 0 1 0 0 1 0 1 112 p 0 1 1 1 1 1 0 88 X 0 1 0 0 1 1 0 113 q 0 1 1 0 1 1 1 89 Y 0 1 0 0 1 1 1 114 r 0 1 1 0 0 0 0 90 Z 0 1 0 1 0 0 0 115 s 1 0 0 0 0 0 1 91 [ 0 1 0 1 0 0 1 116 t 1 0 0 0 0 1 0 92 \ 0 1 0 1 0 1 0 117 u 1 0 0 0 0 1 1 93 ] 0 1 0 1 0 1 1 118 v 1 0 0 0 1 0 0 94 ^ 0 1 0 1 1 0 0 119 w 1 0 0 0 1 0 1 95 _ 0 1 0 1 1 0 1 120 x 1 0 0 0 1 1 0 96 ` 0 1 0 1 1 1 0 121 y 1 0 0 0 1 1 1 97 a 0 1 0 0 1 1 1 122 z 1 0 0 1 0 0 0 98 b 0 1 1 0 0 0 0 123 { 1 0 0 1 0 0 1 99 c 0 1 1 0 0 0 1 124 | 1 0 0 1 0 1 0
100 d 0 1 1 0 0 1 0 125 } 1 0 0 1 0 1 1 101 e 0 1 1 0 0 1 1 126 ~ 1 0 0 1 1 0 0 102 f 0 1 1 0 1 0 0 127 � 1 0 0 1 1 0 1 103 g 0 1 1 0 1 0 1 128 ç 1 0 0 1 1 1 0 104 h 0 1 1 0 1 1 0 129 ü 1 0 0 1 1 1 1
105 i 0 1 1 0 1 1 1 130 â 1 0 1 0 0 0 0 106 j 0 1 1 1 1 1 1
131 â 1 0 1 0 0 0 1

I E S A U T Ó M A T A S P R O G R A M A B L E S
37
Tabla 24 Código ASCII(American Standard Code for information interchange).viii
2.5.3 CÓDIGOS DE COMPLEMENTO A 1 Y 2.
Una vez conociendo el sistema numérico binario, se puede observar que, similarmente con el decimal, existe una cantidad límite que se puede representar con un número determinado de cifras ó dígitos. Así, la mayor cantidad que es posible representar en el sistema decimal:
con una cifra, es: 9 (Nueve)
con dos cifras, es: 99 (Noventa y nueve)
con tres cifras, es: 999 (Novecientos noventa y nueve)
...con n cifras es: 99999....n (Aquella que representen n nueves.)
Tabla 25 Máximo valor posible de ser representado, en sistema decimal, con un número determinado de cifras.
Similarmente, en el sistema numérico binario, la mayor cantidad que es posible representar:
con una cifra, es: 1 (Uno)
con dos cifras, es: 11 (Tres)
con tres cifras, es: 111 (Siete)
...con n cifras, es: 11111....n (Aquella que representen n unos.)
Tabla 26 Máximo valor posible de representar, con un número determinado de cifras, en sistema numérico binario.
En decimal, agrupamos los números en conjuntos de 3 dígitos, para facilitar su manipulación e interpretación. De igual manera, cuando se trabaja con números binarios, en los circuitos digitales, es conveniente considerarlos en grupos de cuatro, a fin de facilitar su manipulación. Así, es frecuente encontrar cifras como las siguientes:
0000, 0101 1011, 1000 0111 0101 1010, 0000 0101 0011 0000 0101 1101 0110 1110
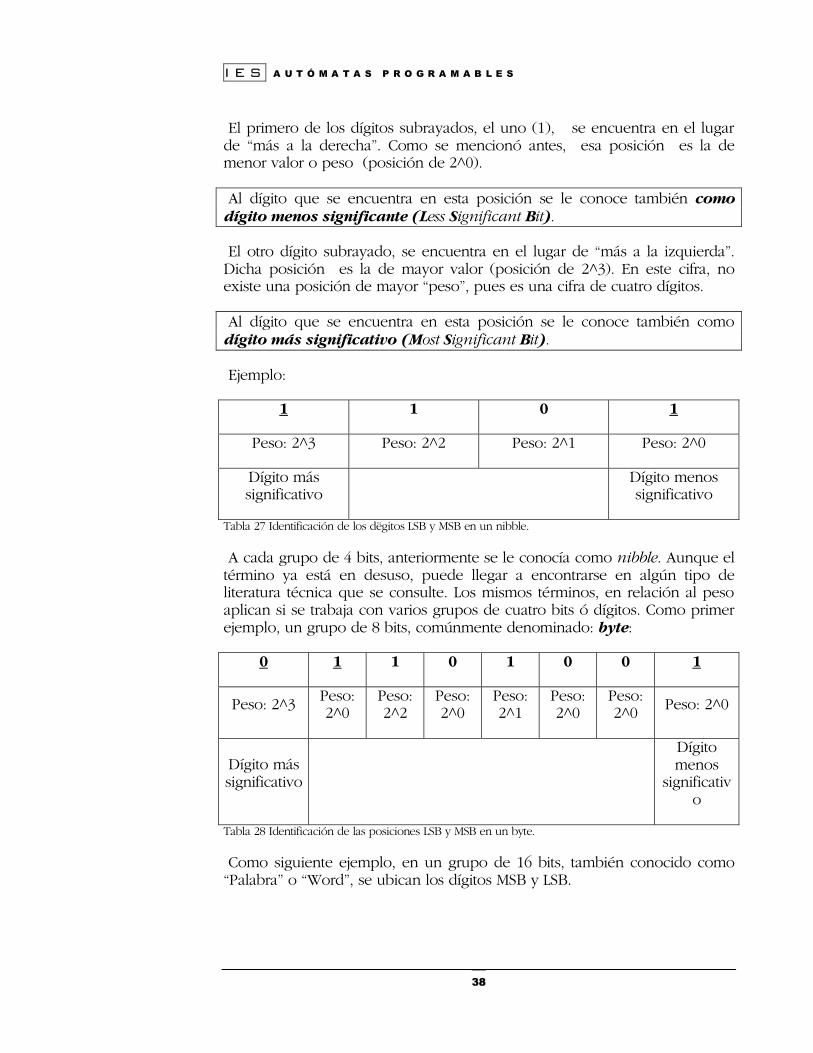
También es útil, identificar el primer y el último dígito de la cifra que se maneja, esto es: el de más a la derecha y el de más a la izquierda, respectivamente. Como ejemplo, en la siguiente cifra:
1 1 0 1
I E S A U T Ó M A T A S P R O G R A M A B L E S
38
El primero de los dígitos subrayados, el uno (1), se encuentra en el lugar de “más a la derecha”. Como se mencionó antes, esa posición es la de menor valor o peso (posición de 2^0).
Al dígito que se encuentra en esta posición se le conoce también como dígito menos significante (Less Significant Bit).
El otro dígito subrayado, se encuentra en el lugar de “más a la izquierda”. Dicha posición es la de mayor valor (posición de 2^3). En este cifra, no existe una posición de mayor “peso”, pues es una cifra de cuatro dígitos.
Al dígito que se encuentra en esta posición se le conoce también como dígito más significativo (Most Significant Bit).
Ejemplo:
1 1 0 1
Peso: 2^3 Peso: 2^2 Peso: 2^1 Peso: 2^0
Dígito más significativo Dígito menos
significativo
Tabla 27 Identificación de los dëgitos LSB y MSB en un nibble.
A cada grupo de 4 bits, anteriormente se le conocía como nibble. Aunque el término ya está en desuso, puede llegar a encontrarse en algún tipo de literatura técnica que se consulte. Los mismos términos, en relación al peso aplican si se trabaja con varios grupos de cuatro bits ó dígitos. Como primer ejemplo, un grupo de 8 bits, comúnmente denominado: byte:
0 1 1 0 1 0 0 1
Peso: 2^3 Peso: 2^0
Peso: 2^2
Peso: 2^0
Peso: 2^1
Peso: 2^0
Peso: 2^0 Peso: 2^0
Dígito más significativo
Dígito menos
significativo
Tabla 28 Identificación de las posiciones LSB y MSB en un byte.
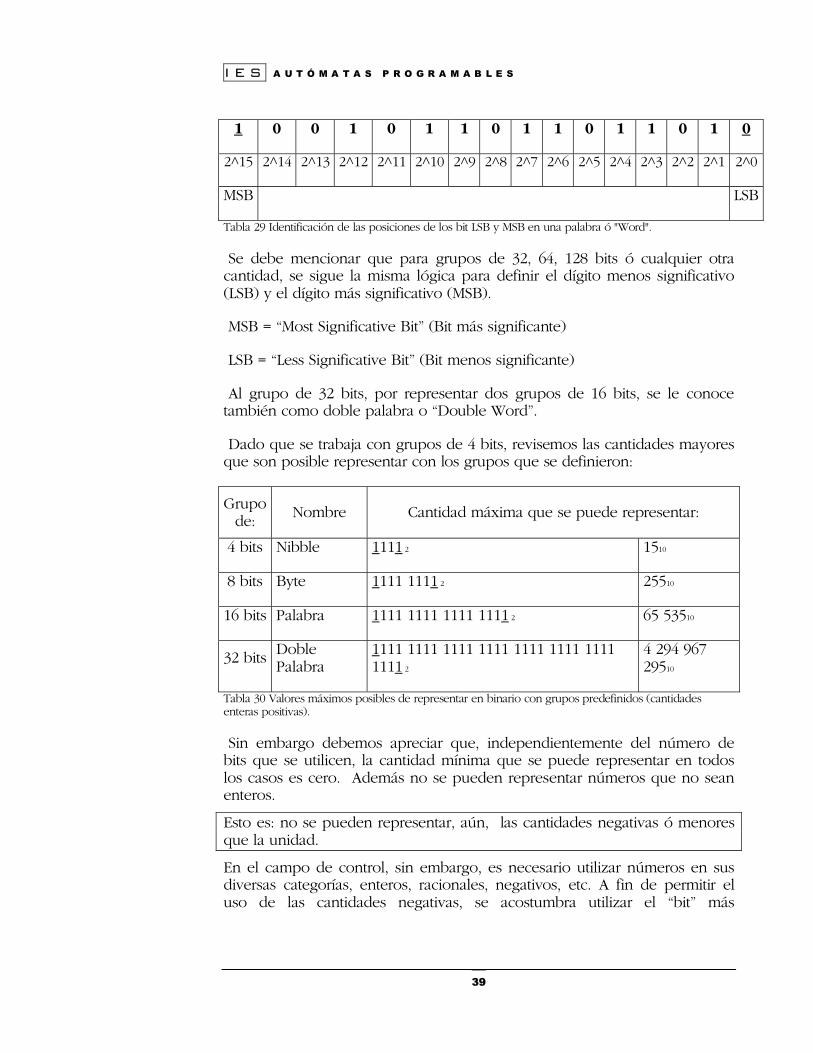
Como siguiente ejemplo, en un grupo de 16 bits, también conocido como “Palabra” o “Word”, se ubican los dígitos MSB y LSB.
I E S A U T Ó M A T A S P R O G R A M A B L E S
39
1 0 0 1 0 1 1 0 1 1 0 1 1 0 1 0
2^15 2^14 2^13 2^12 2^11 2^10 2^9 2^8 2^7 2^6 2^5 2^4 2^3 2^2 2^1 2^0
MSB LSB
Tabla 29 Identificación de las posiciones de los bit LSB y MSB en una palabra ó "Word".
Se debe mencionar que para grupos de 32, 64, 128 bits ó cualquier otra cantidad, se sigue la misma lógica para definir el dígito menos significativo (LSB) y el dígito más significativo (MSB).
MSB = “Most Significative Bit” (Bit más significante)
LSB = “Less Significative Bit” (Bit menos significante)
Al grupo de 32 bits, por representar dos grupos de 16 bits, se le conoce también como doble palabra o “Double Word”.
Dado que se trabaja con grupos de 4 bits, revisemos las cantidades mayores que son posible representar con los grupos que se definieron:
Grupo de:
Nombre Cantidad máxima que se puede representar:
4 bits Nibble 1111 2 1510
8 bits Byte 1111 1111 2 25510
16 bits Palabra 1111 1111 1111 1111 2 65 53510
32 bits Doble Palabra
1111 1111 1111 1111 1111 1111 1111 1111 2
4 294 967 29510
Tabla 30 Valores máximos posibles de representar en binario con grupos predefinidos (cantidades enteras positivas).
Sin embargo debemos apreciar que, independientemente del número de bits que se utilicen, la cantidad mínima que se puede representar en todos los casos es cero. Además no se pueden representar números que no sean enteros.
Esto es: no se pueden representar, aún, las cantidades negativas ó menores que la unidad.
En el campo de control, sin embargo, es necesario utilizar números en sus diversas categorías, enteros, racionales, negativos, etc. A fin de permitir el uso de las cantidades negativas, se acostumbra utilizar el “bit” más
I E S A U T Ó M A T A S P R O G R A M A B L E S
40
significativo (MSB) en todos los casos, para representar el signo de la cantidad representada.
Así, bajo este esquema, 1101 y 0101 representarían la misma cantidad: 5, pero con signo contrario. Cuando el MSB es 0 (cero), entonces se tiene representada una cantidad positiva (+5), en cambio cuando el MSB es 1, se tiene representada una cantidad negativa (-5).
Podríamos, entonces, representar las cantidades binarias con signo, entonces conocer cuando éstas son negativas o positivas. Esto es:
I E S A U T Ó M A T A S P R O G R A M A B L E S
41
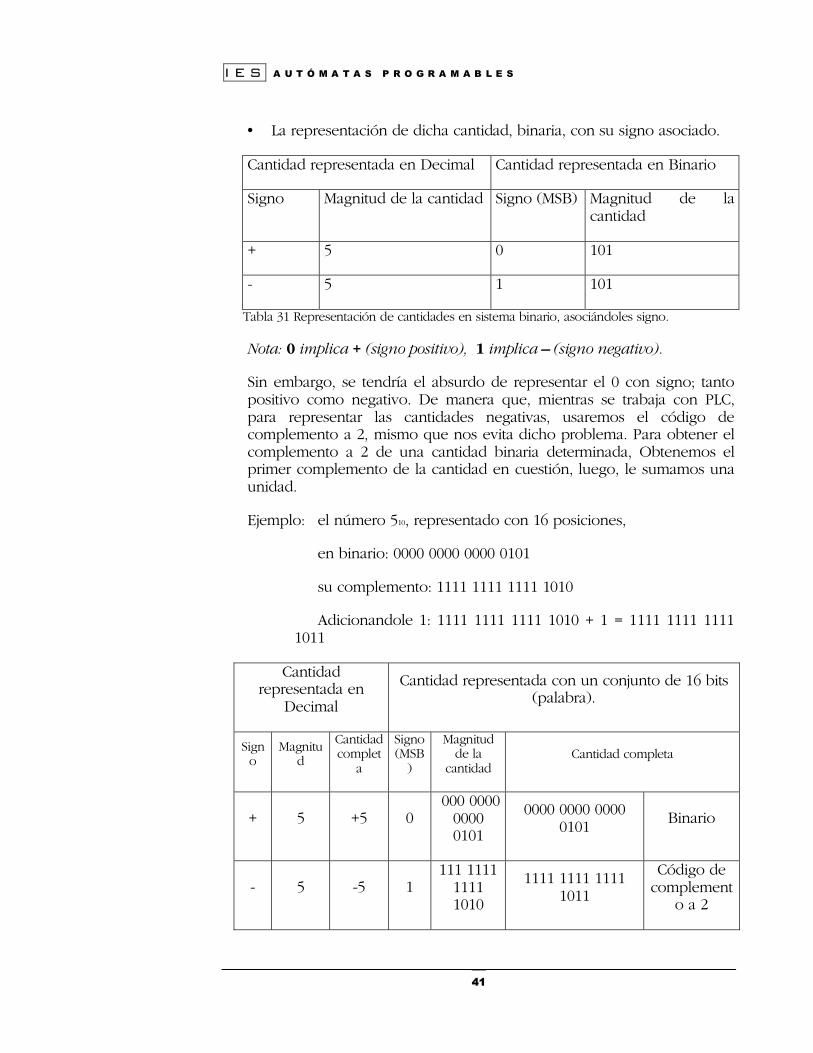
• La representación de dicha cantidad, binaria, con su signo asociado.
Cantidad representada en Decimal Cantidad representada en Binario
Signo Magnitud de la cantidad Signo (MSB) Magnitud de la cantidad
+ 5 0 101
- 5 1 101
Tabla 31 Representación de cantidades en sistema binario, asociándoles signo.
Nota: 0 implica + (signo positivo), 1 implica – (signo negativo).
Sin embargo, se tendría el absurdo de representar el 0 con signo; tanto positivo como negativo. De manera que, mientras se trabaja con PLC, para representar las cantidades negativas, usaremos el código de complemento a 2, mismo que nos evita dicho problema. Para obtener el complemento a 2 de una cantidad binaria determinada, Obtenemos el primer complemento de la cantidad en cuestión, luego, le sumamos una unidad.
Ejemplo: el número 510, representado con 16 posiciones,
en binario: 0000 0000 0000 0101
su complemento: 1111 1111 1111 1010
Adicionandole 1: 1111 1111 1111 1010 + 1 = 1111 1111 1111 1011
Cantidad representada en
Decimal
Cantidad representada con un conjunto de 16 bits (palabra).
Signo
Magnitud
Cantidad complet
a
Signo (MSB
)
Magnitud de la
cantidad Cantidad completa
+ 5 +5 0 000 0000
0000 0101
0000 0000 0000 0101
Binario
- 5 -5 1 111 1111
1111 1010
1111 1111 1111 1011
Código de complement
o a 2

I E S A U T Ó M A T A S P R O G R A M A B L E S
42
Tabla 32 Ejemplo de representación de una cantidad con signo positivo y negativo en un registro de 16 bits.
La misma técnica aplica a cualquier cantidad representadas con grupos de 8 ,16 ó 32 bits (bytes, palabras y dobles palabras), siempre se representa el signo con el MSB.
I E S A U T Ó M A T A S P R O G R A M A B L E S
43
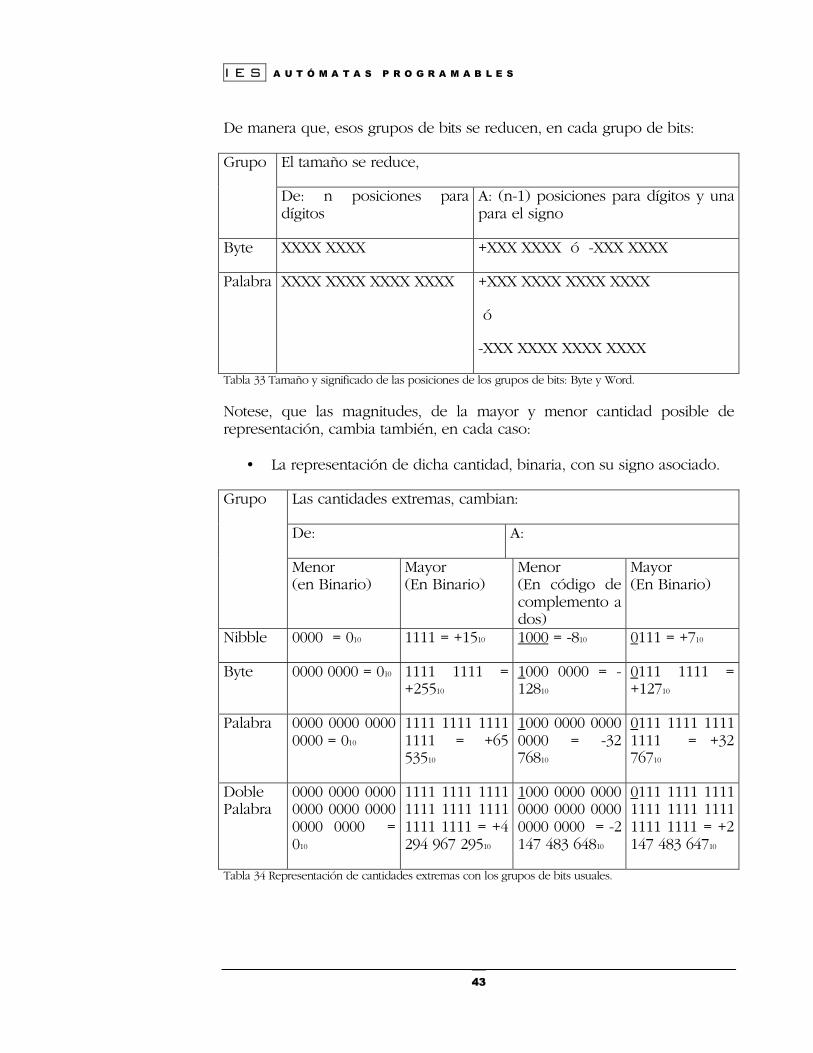
De manera que, esos grupos de bits se reducen, en cada grupo de bits:
El tamaño se reduce, Grupo
De: n posiciones para dígitos
A: (n-1) posiciones para dígitos y una para el signo
Byte XXXX XXXX +XXX XXXX ó -XXX XXXX
Palabra XXXX XXXX XXXX XXXX +XXX XXXX XXXX XXXX
ó
-XXX XXXX XXXX XXXX
Tabla 33 Tamaño y significado de las posiciones de los grupos de bits: Byte y Word.
Notese, que las magnitudes, de la mayor y menor cantidad posible de representación, cambia también, en cada caso:
• La representación de dicha cantidad, binaria, con su signo asociado.
Las cantidades extremas, cambian:
De: A:
Grupo
Menor (en Binario)
Mayor (En Binario)
Menor (En código de complemento a dos)
Mayor (En Binario)
Nibble 0000 = 010 1111 = +1510 1000 = -810 0111 = +710
Byte 0000 0000 = 010 1111 1111 = +25510
1000 0000 = -12810
0111 1111 = +12710
Palabra 0000 0000 0000 0000 = 010
1111 1111 1111 1111 = +65 53510
1000 0000 0000 0000 = -32 76810
0111 1111 1111 1111 = +32 76710
Doble Palabra
0000 0000 0000 0000 0000 0000 0000 0000 = 010
1111 1111 1111 1111 1111 1111 1111 1111 = +4 294 967 29510
1000 0000 0000 0000 0000 0000 0000 0000 = -2 147 483 64810
0111 1111 1111 1111 1111 1111 1111 1111 = +2 147 483 64710
Tabla 34 Representación de cantidades extremas con los grupos de bits usuales.
I E S A U T Ó M A T A S P R O G R A M A B L E S
44
Dado que el código de complemento a 2, implica descartar el cero negativo, se puede representar una cifra más que con las otras dos formas de representar las cantidades. Esta ventaja se observa al realizar operaciones aritméticas con cantidades binarias. El código de complemento a 2 es el más usado para representar cantidades enteras negativas, que se almacenan en los registros, en el control por PLC. Algunos casos relevantes, se muestran enseguida:
• El cero en código de complemento a dos.
010 = 0000 0000 0000 00002
Su complemento: 1111 1111 1111 1111
Adicionando 1: 0000 0000 0000 0000
Conclusión: 0 en código de complemento a 2 es: 0000 0000 0000 0000
• El 32768 en código de complemento a dos:
+3276710 = 0111 1111 1111 11112
+32768 no se puede representar con 15 dígitos, solo con 16, y adicionando el del signo, se requieren 17 bits. Sin embargo, es posible representar el valor negativo de dicha cantidad con 16 bits:
+32768 = 0 1000 0000 0000 0000 0000
Su complemento: 0111 1111 1111 1111
Adicionando 1: 1000 0000 0000 0000
Conclusión: -32768 en código de complemento a 2: 1000 0000 0000 0000
Además, el 1000 0000 0000 0000 no puede representar al –0, dado que es un absurdo.
Existen otros códigos usados para manipular la información binaria en el autómata programable, como el código “Gray” que se utilizará al trabajar con conversiones A/D, o las representaciones para punto flotante; ambas se revisan en los siguientes volúmenes complemento.
I E S A U T Ó M A T A S P R O G R A M A B L E S
45
Lógica de circuitos
La lógica de circuitos nos permite observar el fenómeno eléctrico y el funcionamiento de los elementos del circuito desde una perspectiva diferente. Una simple perspectiva lógica que nos adentra al mundo del control, modelando matemáticamente algunos de los eventos a controlar. Tomando como antecedente los conocimientos en electricidad y matemáticas que, previamente adquiriste, los sistemas numéricos y la lógica, de éstos capítulos, estas listo para explorar el mundo del control digital por medio del poderoso Autómata Programable ó PLC.
3.1 La perspectiva lógica de los elementos del circuito. La Lógica es considerada una ciencia. Trata de los principios que hacen válidos al razonamiento o la argumentación del razonamiento. En otras palabras: intenta determinar, bajo que condiciones es razonablemente justificable que una persona deduzca una conclusión a partir de los indicios con que cuenta. Debe existir una relación entre los argumentos ó indicios y
Capítulo
3
I E S A U T Ó M A T A S P R O G R A M A B L E S
46
la conclusión de manera que, si los argumentos son válidos ó verdad, la conclusión también lo es.
Observemos un ejemplo de proposición lógica. Cuando alguien llega de noche a una casa a obscuras, podría razonar de una manera similar a la siguiente:
Si activo el interruptor, la lámpara iluminará la habitación.
En tal caso, la premisa, condición ó argumento es: activo el interruptor.
Y la consecuencia, conclusión, acción ó resultado es: la lámpara iluminará la habitación.
Todos entendemos que es un razonamiento válido, que es lógico, que si se activa el interruptor, la lámpara encenderá.
Ejercicio. Analiza y comenta en grupo algunos otros ejemplos de razonamiento lógico de la vida cotidiana.
Si combinamos ésta forma lógica de razonamiento con el sistema numérico binario que ha sido explicado en el capítulos anteriores, en conjunto con nuestros conocimientos previos de electricidad, entre otros, podemos diseñar sencillos algoritmos para controlar sistemas en base a señales discretas y utilizando el PLC .
Un interruptor sencillo, un relevador o una válvula de dos estados, está diseñado para operar en el modo ON-OFF, ya sea conduciendo o no conduciendo; energizándose o des-energizándose (lo mismo ocurre en los transistores cuando se trabajan en sus puntos de corte y saturación). Estos se identifican como dispositivos binarios. Recuérdese que variable binaria puede tomar los valores 0 ó 1.
Para un dispositivo binario cualquiera, llamémosle “A”, que tiene dos estados posibles, podemos identificar cada uno de dichos estados del dispositivo con dos símbolos. Usemos 0 y 1:
El estado A=0 significa que el elemento está abierto o des-energizado.
El estado A=1 significa que el elemento está cerrado o energizado.
Tabla 35 Posibles combinaciones de estados en un dispositivo binario.
Por ejemplo, para un interruptor pulsador A, normalmente abierto, A=1 significa que el botón está siendo actuado (que conmuta); A=0 significaría que el botón no está siendo presionado (que no conmuta).
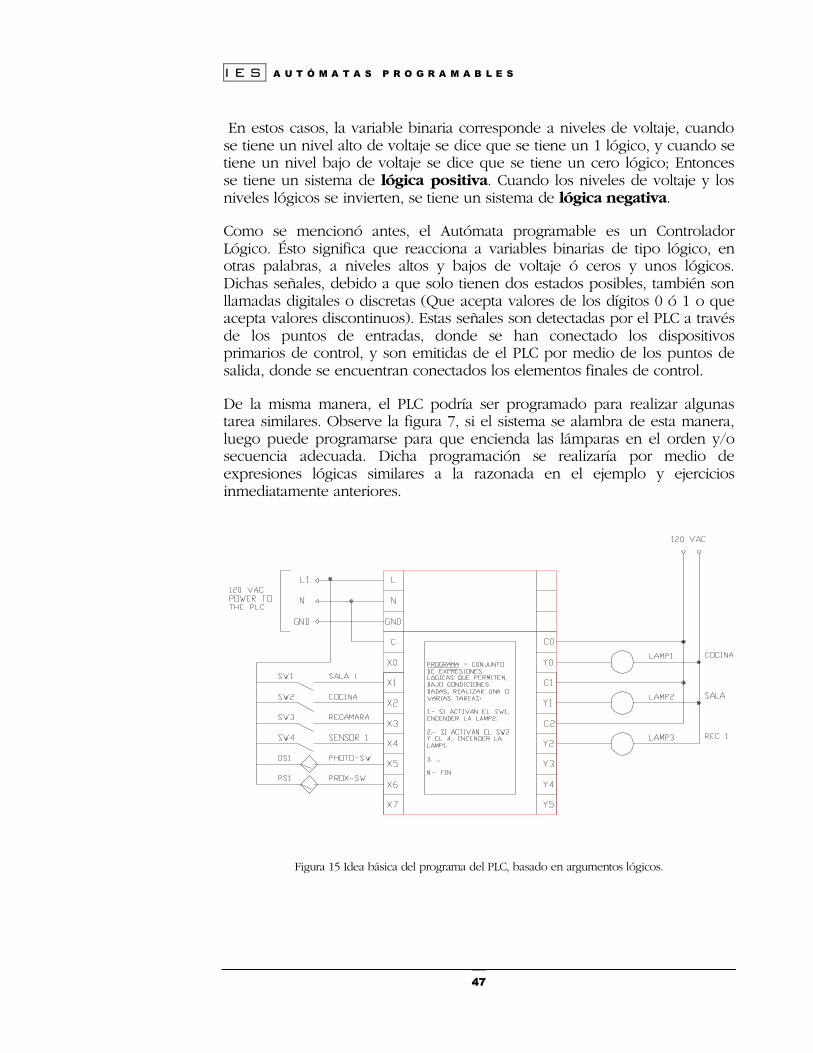
I E S A U T Ó M A T A S P R O G R A M A B L E S
47
En estos casos, la variable binaria corresponde a niveles de voltaje, cuando se tiene un nivel alto de voltaje se dice que se tiene un 1 lógico, y cuando se tiene un nivel bajo de voltaje se dice que se tiene un cero lógico; Entonces se tiene un sistema de lógica positiva. Cuando los niveles de voltaje y los niveles lógicos se invierten, se tiene un sistema de lógica negativa.
Como se mencionó antes, el Autómata programable es un Controlador Lógico. Ésto significa que reacciona a variables binarias de tipo lógico, en otras palabras, a niveles altos y bajos de voltaje ó ceros y unos lógicos. Dichas señales, debido a que solo tienen dos estados posibles, también son llamadas digitales o discretas (Que acepta valores de los dígitos 0 ó 1 o que acepta valores discontinuos). Estas señales son detectadas por el PLC a través de los puntos de entradas, donde se han conectado los dispositivos primarios de control, y son emitidas de el PLC por medio de los puntos de salida, donde se encuentran conectados los elementos finales de control.
De la misma manera, el PLC podría ser programado para realizar algunas tarea similares. Observe la figura 7, si el sistema se alambra de esta manera, luego puede programarse para que encienda las lámparas en el orden y/o secuencia adecuada. Dicha programación se realizaría por medio de expresiones lógicas similares a la razonada en el ejemplo y ejercicios inmediatamente anteriores.
Figura 15 Idea básica del programa del PLC, basado en argumentos lógicos.
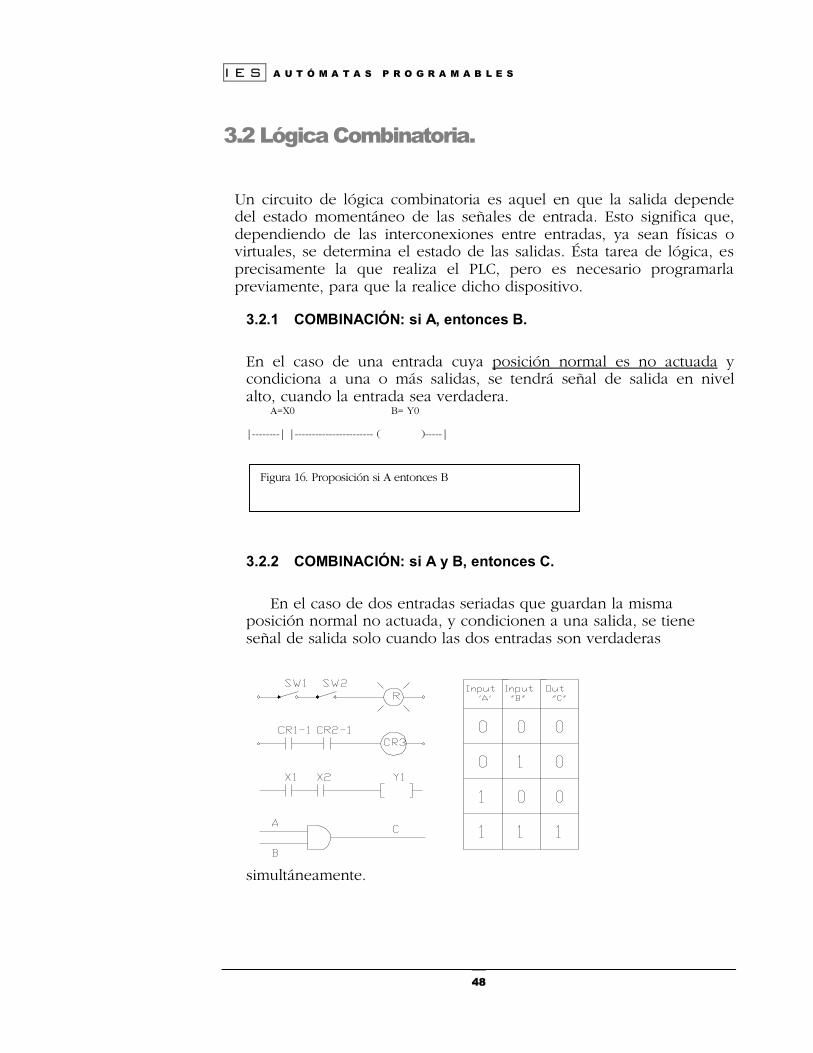
I E S A U T Ó M A T A S P R O G R A M A B L E S
48
3.2 Lógica Combinatoria.
Un circuito de lógica combinatoria es aquel en que la salida depende del estado momentáneo de las señales de entrada. Esto significa que, dependiendo de las interconexiones entre entradas, ya sean físicas o virtuales, se determina el estado de las salidas. Ésta tarea de lógica, es precisamente la que realiza el PLC, pero es necesario programarla previamente, para que la realice dicho dispositivo.
3.2.1 COMBINACIÓN: si A, entonces B.
En el caso de una entrada cuya posición normal es no actuada y condiciona a una o más salidas, se tendrá señal de salida en nivel alto, cuando la entrada sea verdadera.
A=X0 B= Y0
|--------| |----------------------- ( )-----|
3.2.2 COMBINACIÓN: si A y B, entonces C.
En el caso de dos entradas seriadas que guardan la misma posición normal no actuada, y condicionen a una salida, se tiene señal de salida solo cuando las dos entradas son verdaderas
simultáneamente.
Figura 16. Proposición si A entonces B
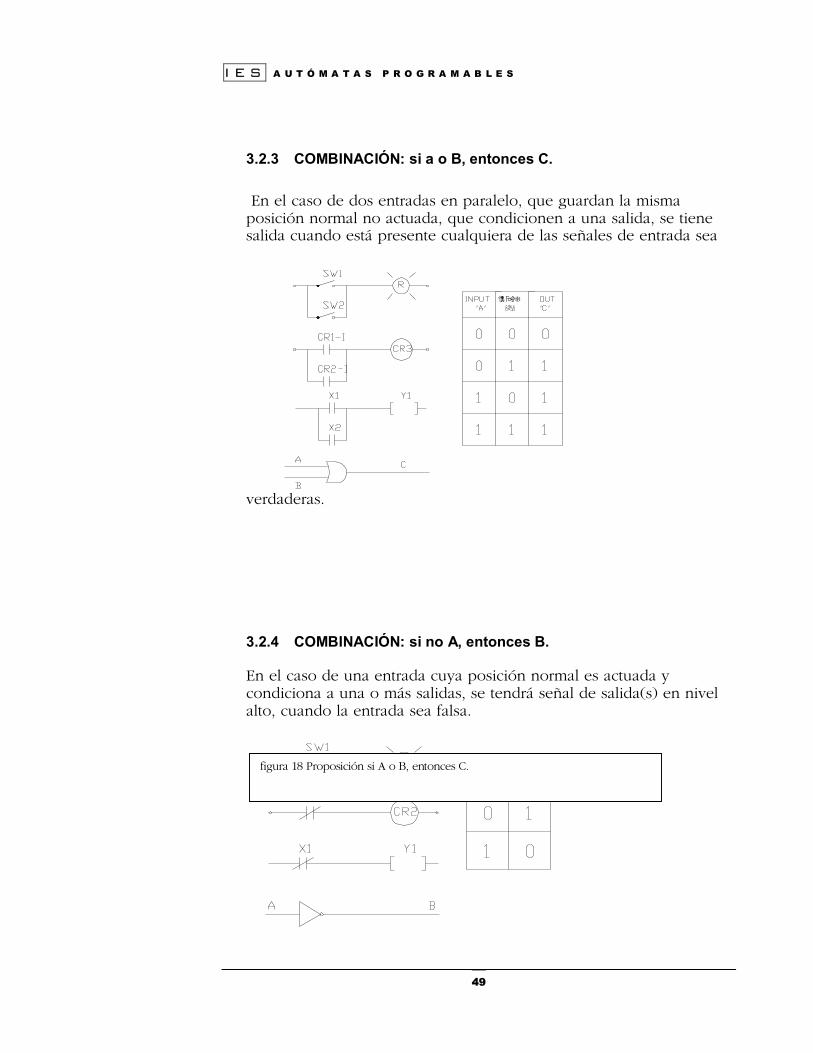
I E S A U T Ó M A T A S P R O G R A M A B L E S
49
3.2.3 COMBINACIÓN: si a o B, entonces C.
En el caso de dos entradas en paralelo, que guardan la misma posición normal no actuada, que condicionen a una salida, se tiene salida cuando está presente cualquiera de las señales de entrada sea
verdaderas.
3.2.4 COMBINACIÓN: si no A, entonces B. En el caso de una entrada cuya posición normal es actuada y condiciona a una o más salidas, se tendrá señal de salida(s) en nivel alto, cuando la entrada sea falsa.
figura 18 Proposición si A o B, entonces C.
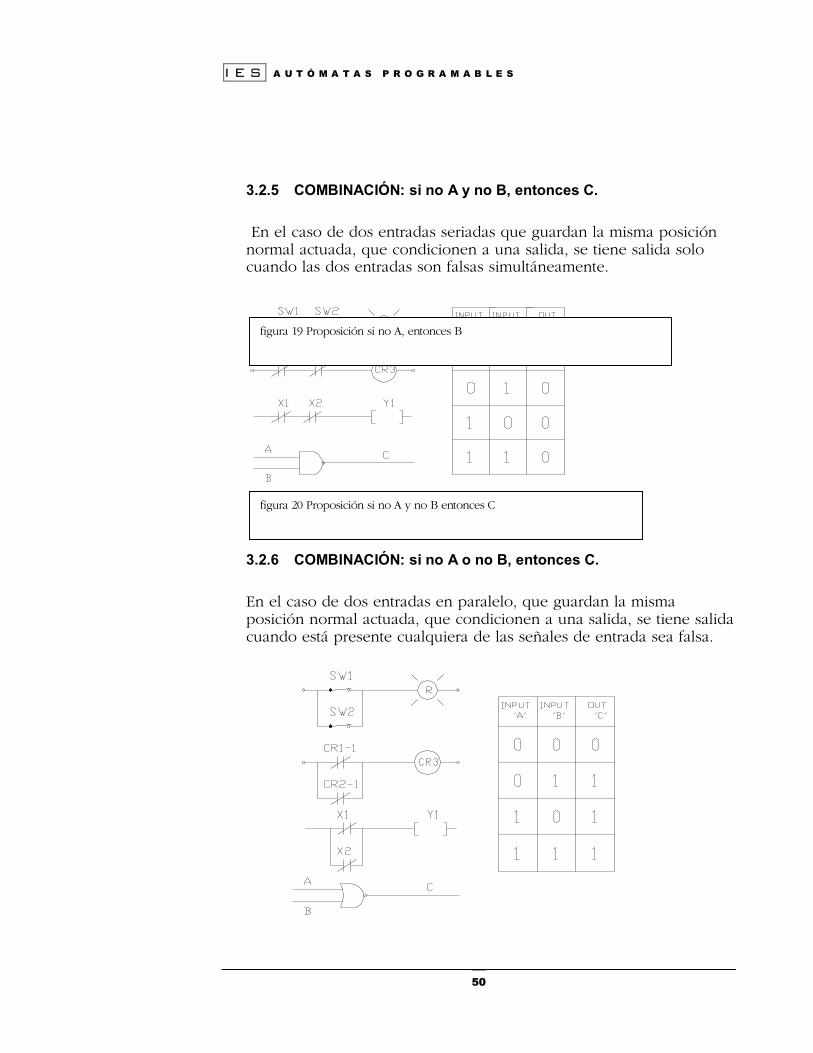
I E S A U T Ó M A T A S P R O G R A M A B L E S
50
3.2.5 COMBINACIÓN: si no A y no B, entonces C.
En el caso de dos entradas seriadas que guardan la misma posición normal actuada, que condicionen a una salida, se tiene salida solo cuando las dos entradas son falsas simultáneamente.
3.2.6 COMBINACIÓN: si no A o no B, entonces C.
En el caso de dos entradas en paralelo, que guardan la misma posición normal actuada, que condicionen a una salida, se tiene salida cuando está presente cualquiera de las señales de entrada sea falsa.
figura 19 Proposición si no A, entonces B
figura 20 Proposición si no A y no B entonces C
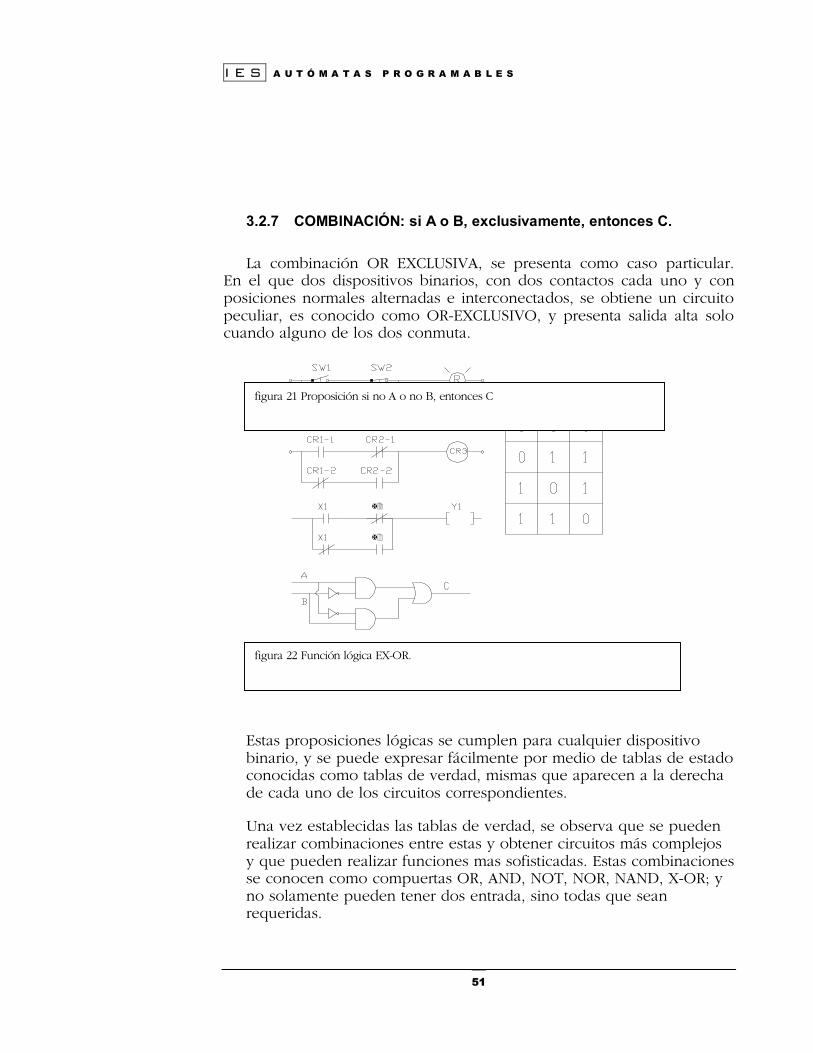
I E S A U T Ó M A T A S P R O G R A M A B L E S
51
3.2.7 COMBINACIÓN: si A o B, exclusivamente, entonces C.
La combinación OR EXCLUSIVA, se presenta como caso particular. En el que dos dispositivos binarios, con dos contactos cada uno y con posiciones normales alternadas e interconectados, se obtiene un circuito peculiar, es conocido como OR-EXCLUSIVO, y presenta salida alta solo cuando alguno de los dos conmuta.
Estas proposiciones lógicas se cumplen para cualquier dispositivo binario, y se puede expresar fácilmente por medio de tablas de estado conocidas como tablas de verdad, mismas que aparecen a la derecha de cada uno de los circuitos correspondientes.
Una vez establecidas las tablas de verdad, se observa que se pueden realizar combinaciones entre estas y obtener circuitos más complejos y que pueden realizar funciones mas sofisticadas. Estas combinaciones se conocen como compuertas OR, AND, NOT, NOR, NAND, X-OR; y no solamente pueden tener dos entrada, sino todas que sean requeridas.
figura 21 Proposición si no A o no B, entonces C
figura 22 Función lógica EX-OR.
I E S A U T Ó M A T A S P R O G R A M A B L E S
52
Al realizar combinaciones de compuertas, y realizar la retroalimentación de la salida, se pueden obtener circuitos de memoria, que funcionan de manera similar al circuito de arranque-paro con retención que usted ya conoce, entre otros. Tales circuito se estudian en la sección de lógica secuencial.
3.2.8 APLICACIÓN DE LÓGICA COMBINATORIA.
Realizar la práctica 1 correspondiente al manual de prácticas.
Nivel 1: Práctica 1, Ejercicios 1 y 2
(Inicio de programación).
Nivel 2: Práctica 11, Ejercicios 1, 2 y 3
(Control manual de desplazamiento de tambores de la máquina Cizalla Automática K1).
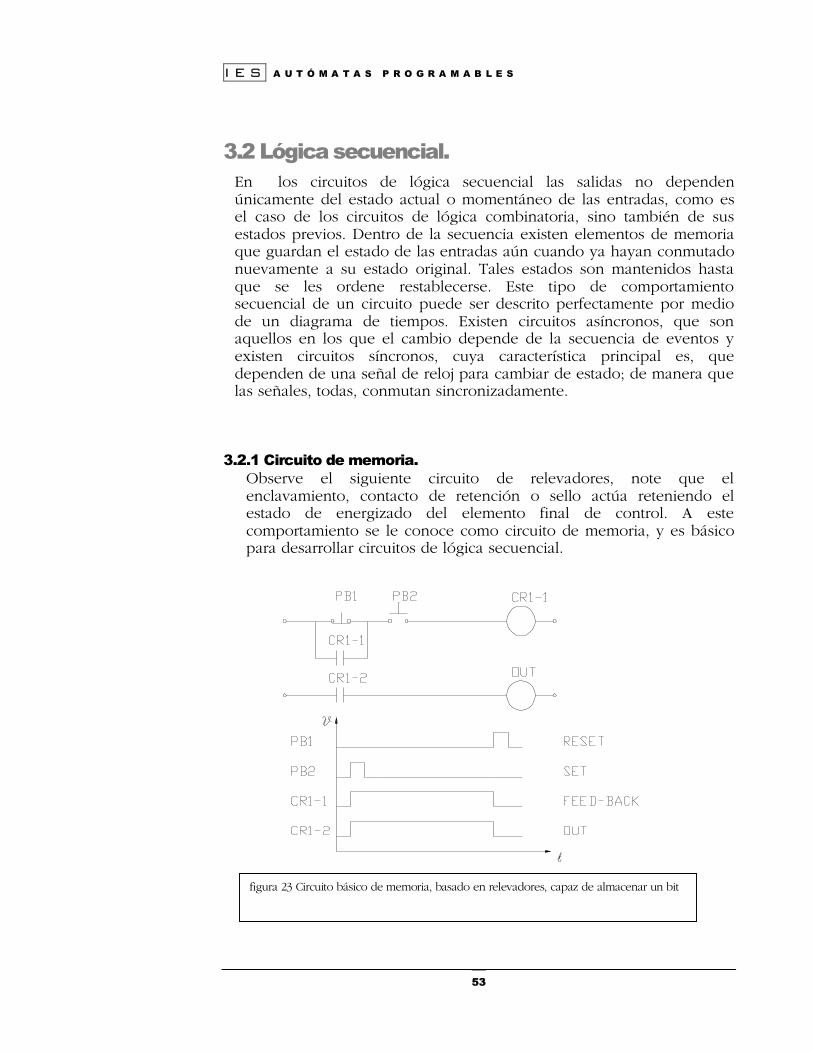
I E S A U T Ó M A T A S P R O G R A M A B L E S
53
3.2 Lógica secuencial. En los circuitos de lógica secuencial las salidas no dependen únicamente del estado actual o momentáneo de las entradas, como es el caso de los circuitos de lógica combinatoria, sino también de sus estados previos. Dentro de la secuencia existen elementos de memoria que guardan el estado de las entradas aún cuando ya hayan conmutado nuevamente a su estado original. Tales estados son mantenidos hasta que se les ordene restablecerse. Este tipo de comportamiento secuencial de un circuito puede ser descrito perfectamente por medio de un diagrama de tiempos. Existen circuitos asíncronos, que son aquellos en los que el cambio depende de la secuencia de eventos y existen circuitos síncronos, cuya característica principal es, que dependen de una señal de reloj para cambiar de estado; de manera que las señales, todas, conmutan sincronizadamente.
3.2.1 Circuito de memoria. Observe el siguiente circuito de relevadores, note que el enclavamiento, contacto de retención o sello actúa reteniendo el estado de energizado del elemento final de control. A este comportamiento se le conoce como circuito de memoria, y es básico para desarrollar circuitos de lógica secuencial.
figura 23 Circuito básico de memoria, basado en relevadores, capaz de almacenar un bit

I E S A U T Ó M A T A S P R O G R A M A B L E S
54
A continuación se muestra el circuito básico de memoria, que se compone de compuertas lógicas, éste también se conoce como flip-flop RS, la figura muestra el correspondiente diagrama de tiempos; la figura inferior muestra el equivalente en programa de diagrama de escalera.
figura 24 Circuito básico de memoria o flip flop RS.
Figura 25 Función de memoria en diagrama de escalera, para PLC.
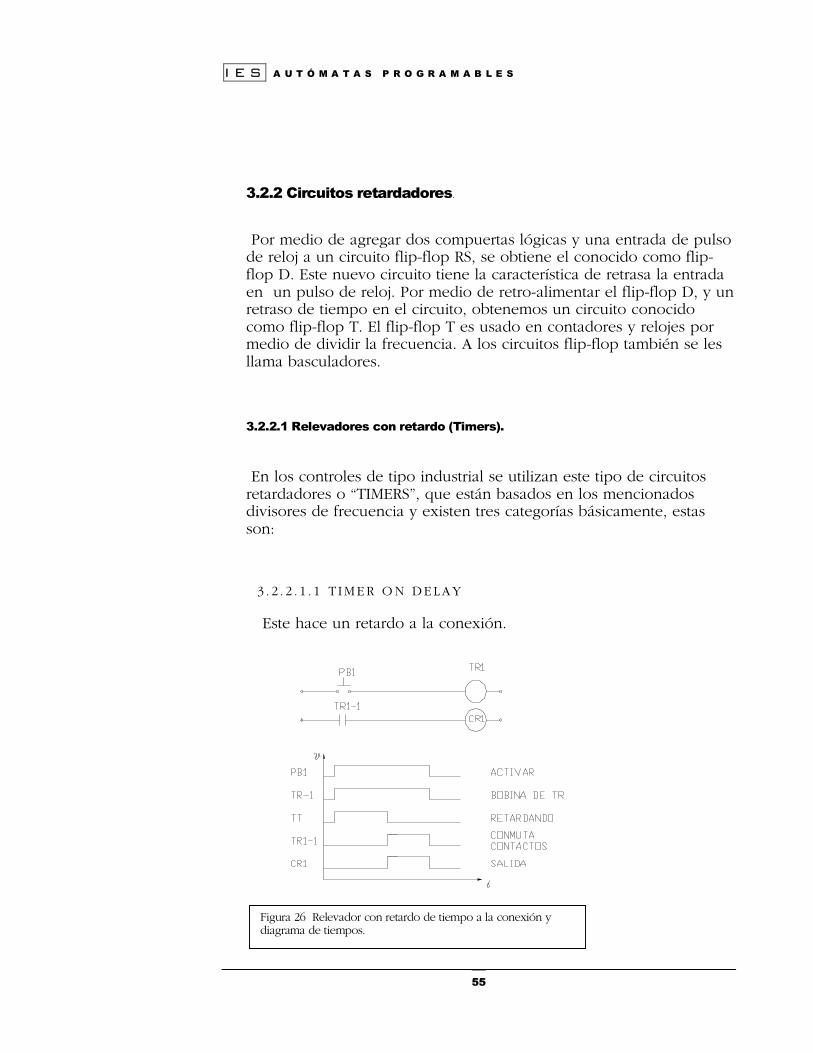
I E S A U T Ó M A T A S P R O G R A M A B L E S
55
3.2.2 Circuitos retardadores.
Por medio de agregar dos compuertas lógicas y una entrada de pulso de reloj a un circuito flip-flop RS, se obtiene el conocido como flip-flop D. Este nuevo circuito tiene la característica de retrasa la entrada en un pulso de reloj. Por medio de retro-alimentar el flip-flop D, y un retraso de tiempo en el circuito, obtenemos un circuito conocido como flip-flop T. El flip-flop T es usado en contadores y relojes por medio de dividir la frecuencia. A los circuitos flip-flop también se les llama basculadores.
3.2.2.1 Relevadores con retardo (Timers).
En los controles de tipo industrial se utilizan este tipo de circuitos retardadores o “TIMERS”, que están basados en los mencionados divisores de frecuencia y existen tres categorías básicamente, estas son:
3 . 2 . 2 . 1 . 1 T IMER O N DELAY
Este hace un retardo a la conexión.
Figura 26 Relevador con retardo de tiempo a la conexión y diagrama de tiempos.
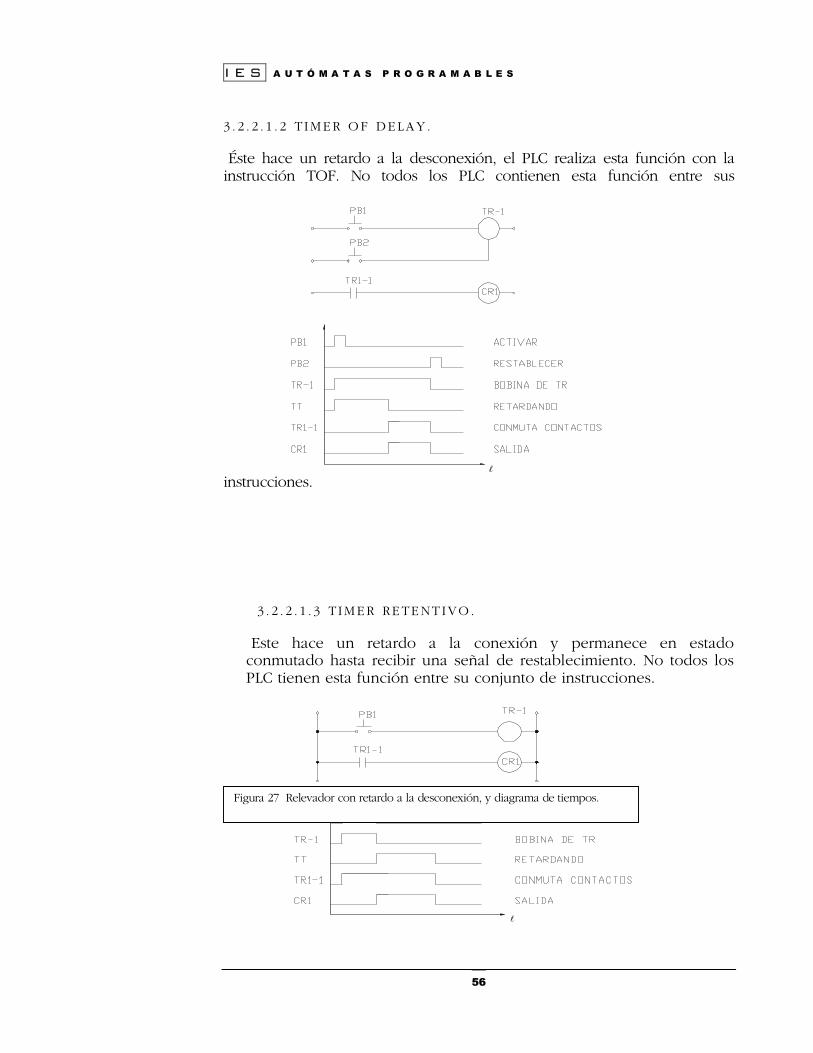
I E S A U T Ó M A T A S P R O G R A M A B L E S
56
3 . 2 . 2 . 1 . 2 T IMER OF DELAY .
Éste hace un retardo a la desconexión, el PLC realiza esta función con la instrucción TOF. No todos los PLC contienen esta función entre sus
instrucciones.
3 . 2 . 2 . 1 . 3 T IMER RETENT IVO .
Este hace un retardo a la conexión y permanece en estado conmutado hasta recibir una señal de restablecimiento. No todos los PLC tienen esta función entre su conjunto de instrucciones.
Figura 27 Relevador con retardo a la desconexión, y diagrama de tiempos.

I E S A U T Ó M A T A S P R O G R A M A B L E S
57
En resumen, el PLC relaciona los estados de las entradas, realiza operaciones lógicas y, en base a los resultados obtenidos en estas operaciones, habilita ó deshabilita las salidas. Esto significa que el PLC procesa la información que recibe por medio de las entradas. Podemos considerar que obtiene una visión o que percibe de alguna manera al mundo exterior por medio de las señales que recibe en los puntos de entrada; dado que estas señales pueden tener dos estados diferentes posibles, el procesador recibe señales binarias, y de esta misma forma las procesa.
El PLC, entonces, procesa las señales basado en los razonamientos lógicos explicados brevemente en los capítulos anteriores y gracias a los circuitos electrónicos que lo componen, puede realizar desde sencillas operaciones de comparación entre el estado de dos señales binarias hasta complicadas operaciones aritméticas, lógicas, de movimiento de información, entre otras; que el hombre tardaría un tiempo considerable en procesar. Podemos decir que el procesador, al hacer conmutar las salidas, modifica el entorno del mundo exterior en el que influye, tarea para la que ha sido programado.
Figura 28 Timer retentivo y el correspondiente diagrama de tiempo.`
I E S A U T Ó M A T A S P R O G R A M A B L E S
58
La programación de autómatas PLC
Los dispositivos, así como los programas de interfaz, protocolos y estándares de comunicación; cambian radicalmente entre fabricantes, son inclusive incompatibles, aunque la tendencia es a revertir tal situación. Pero los fundamentos que se explican en este capítulo son generales, aplican a todo tipo de autómata programable. Se explicará acerca de los modos de operación, el ciclo de barrido o SCAN, los procedimientos e instrucciones básicas de programación aplicables a cualquier PLC.
4.1 El ciclo de barrido del programa, ó “scan” El Procesador está diseñado para realizar un conjunto de tareas de manera repetitiva, entre éstas tareas se encuentra el ejecutar el programa de usuario. A este conjunto de tareas desarrolladas cíclicamente se le conoce como ciclo de “scan”, de barrido o de exploración, y se realiza en su totalidad cuando el procesador se
Capítulo
4
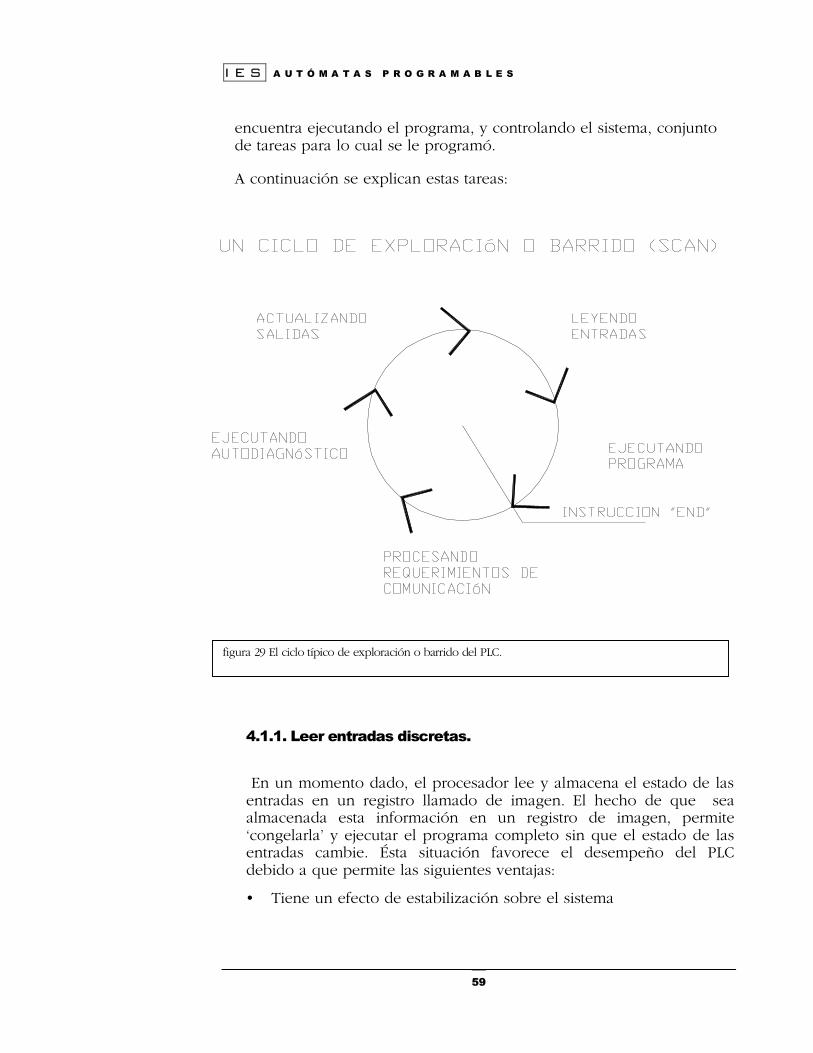
I E S A U T Ó M A T A S P R O G R A M A B L E S
59
encuentra ejecutando el programa, y controlando el sistema, conjunto de tareas para lo cual se le programó.
A continuación se explican estas tareas:
4.1.1. Leer entradas discretas.
En un momento dado, el procesador lee y almacena el estado de las entradas en un registro llamado de imagen. El hecho de que sea almacenada esta información en un registro de imagen, permite ‘congelarla’ y ejecutar el programa completo sin que el estado de las entradas cambie. Ésta situación favorece el desempeño del PLC debido a que permite las siguientes ventajas:
• Tiene un efecto de estabilización sobre el sistema
figura 29 El ciclo típico de exploración o barrido del PLC.
I E S A U T Ó M A T A S P R O G R A M A B L E S
60
• También es más rápido para el CPU, tener acceso al registro de imagen que a las entradas directamente.
• Además, las entradas y salidas son entidades binarias elementales, o sea “bits”; pero en cambio, la CPU puede tener acceso al registro de imagen como “byte” o como palabra de datos, esto provee flexibilidad adicional.
4.1.2 Ejecutar programa.
Durante esta fase del ciclo de barrido, el procesador ejecuta el programa tal como se encuentra almacenado, iniciando con la primera instrucción del primer escalón y hasta encontrar la instrucción END.
4.1.3 Procesar cualquier requerimiento de comunicación.
El PLC procesa cualquier señal que se reciba a través del puerto de comunicación.
4.1.4 Realizar un autodiagnóstico.
Aquí, el PLC realiza un chequeo de su “firmware”, su memoria de programa y el estado de los módulos de entrada y salida.
4.1.5 Actualizar las salidas.
Al final de “scan”, el procesador escribe en el registro de imagen de salidas, el nuevo estado que tomarán éstas.
I E S A U T Ó M A T A S P R O G R A M A B L E S
61
4.2 Modos de operación del PLC
El PLC típicamente tiene tres modos de operación, aunque algunos pueden llegar a tener muchos más, y en ocasiones también menos, las tareas que realiza son las mismas que se explican para estos tres modos. Tales modos ó formas de operación son: STOP, RUN, PROGRAM.
4.2.1 Modo de operación “Correr el programa o RUN”
En el modo de RUN, el ciclo de barrido se ejecuta completo, tal como se explicó en el punto 4.1. Se sobreentiende que el procesador está realizando la tarea de controlar algún sistema, y está operando con normalidad, ejecutando el programa de usuario que se almacenó previamente.
4.2.1 Modo de operación “Detener ó STOP”
En el modo de STOP el ciclo de exploración se ejecuta sin correr el programa. Se utiliza para detener la ejecución del programa, las salidas quedan desactivadas y el programa dejará de ejecutarse. Se utiliza para configurar el equipo, programarlo ó realizar algunas otras tareas que requieran que el programa no sea ejecutado en ese momento.
4.2.1 Modo de operación “permitir programación ó PROGRAM”
En el modo de PROGRAM se habilita al PLC para ser programado. Básicamente se selecciona para permitir la programación del PLC por medio de algún dispositivo externo, que puede ser para ese propósito especial, o una PC con el programa de interfaz apropiado .
I E S A U T Ó M A T A S P R O G R A M A B L E S
62
4.3 Procedimientos generales de programación.
El software de interfaz para cualquier PLC, y que se instala en un ordenador, es típicamente desarrollado para ser usado con una computadora personal compatible a IBM. Se distribuye en un medio de acceso común, ya sea discos “floppy” de 3.5“, CD-ROM ó algún otro. Generalmente este software es útil para programar toda la familia de procesadores del mismo fabricante. Una vez que se ha comprendido como programar y operar el PLC, se encontrará este software muy útil para documentar programas e incrementar la productividad. Hoy en día, este software es una herramient útil, se puede decir, que nos lleva de la mano paso a paso para desarrollar el proyecto en proceso.
4.3.1 Descripción del Hardware
Actualmente los procesadores pequeños son generalmente fabricados para establecer comunicación con una computadora personal bajo el estándar de comunicación universal RS-232. Para esto, basta con conectar el cable entre los puertos de comunicación serial del PLC y de la PC. En el caso de la PC, se puede usar cualquiera, COM1 ó COM 2, y en el caso del PLC típicamente es el único puerto disponible. Este cable siempre puede ser adquirido como parte del paquete de programa de interfaz (software) o por separado, pero si se cuenta con la información adecuada, también puede ser fácilmente fabricado por el usuario final.
Cuando el estándar de comunicación utilizado por el PLC es diferente de RS-232, es necesario utilizar un circuito de interfaz electrónica para establecer comunicación con el PLC. Esta interfaz, convertirá el formato que utilice el PLC como estándar para la comunicación en RS-232 que utiliza nuestra PC.
Sin embargo, si utilizamos una terminal de programación manual, que es una interfaz en sí, no es necesario software adicional, basta con conectarla directamente al puerto de comunicación del PLC y podemos iniciar.
I E S A U T Ó M A T A S P R O G R A M A B L E S
63
4.3.2 Descripción de los Programas de interfaz o “Software”
Los programas de interfaz para el PLC (software de programación) son el método más común hoy en día para programar al PLC. Éste nos permite desarrollar un programa con una interfaz gráfica en que lo visualizamos en forma de diagrama de escalera, y nos permite realizar las siguientes tareas:
4.3.2.1 Transferencia de programas.
Entre el PLC y la PC en ambos sentidos, dentro del PLC entre diferentes módulos de memoria, de la PC a una impresora de cualquier tipo, entre la PC y cualquier sistema de almacenamiento en ambos sentidos. La PC siempre almacena el programa en su memoria RAM, y es el programa que creamos o modificamos en pantalla, pero si deseamos transferirlo de la RAM al PLC o almacenarlo en “diskette”, debemos transferirlo.
4.3.2.2 Generación de reportes escritos.
No solamente podemos imprimir el programa, sino un conjunto de reportes muy útiles como el de la tabla de datos, la referencia cruzada, los comentarios y símbolos ó alias de los dispositivos, esto significa: una documentación completa del programa.
4.3.2.3 Desarrollo y documentación de programas.
Los programas del PLC pueden ser desarrollados fuera de línea (OFFLINE), esto significa que no es indispensable el hecho de mantener conectada la computadora al PLC para desarrollar el programa en diagrama de escalera; se pueden colocar etiquetas de identificación en los renglones e instrucciones, también se puede crear una tabla de desplegado de datos para monitorear las instrucciones seleccionadas. Las tablas de referencia cruzada creadas automáticamente al imprimir los programas, organizan instrucciones, direcciones, números de los renglones y comentarios, de manera que la Interrelación sea fácilmente identificable.
I E S A U T Ó M A T A S P R O G R A M A B L E S
64
4.3.2.4 Monitoreo en línea.
Los programas del SLC se pueden monitorear por medio del formato de programa en diagrama de escalera ó una tabla de desplegado de datos. El estado verdadero de las instrucciones se observa por medio de la intensificación ó video invertido. Los parámetros de relevadores con retardo y contadores pueden ajustarse. En algunos procesadores se pueden realizar cambios de valores de parámetros en dispositivos, en algunos otros es necesario desconectarse .
4.3.2.5 Configuración del sistema.
El software de interfaz entre la computadora personal y el PLC puede ser configurado fácilmente por el usuario para seleccionar la velocidad de comunicación, el puerto serial a utilizar, el puerto paralelo a utilizar por la impresora, los colores de la pantalla, y opciones de video rápido, entre una gran diversidad de opciones que difieren entre fabricantes de PLC que son los desarrolladores del software. Actualmente, se presentan en ambiente Windows1, y con opciones de tipo común a todos los programas, permiten un ambiente de trabajo amigable.
1 Windows es marca registrada de Microsoft, corp.
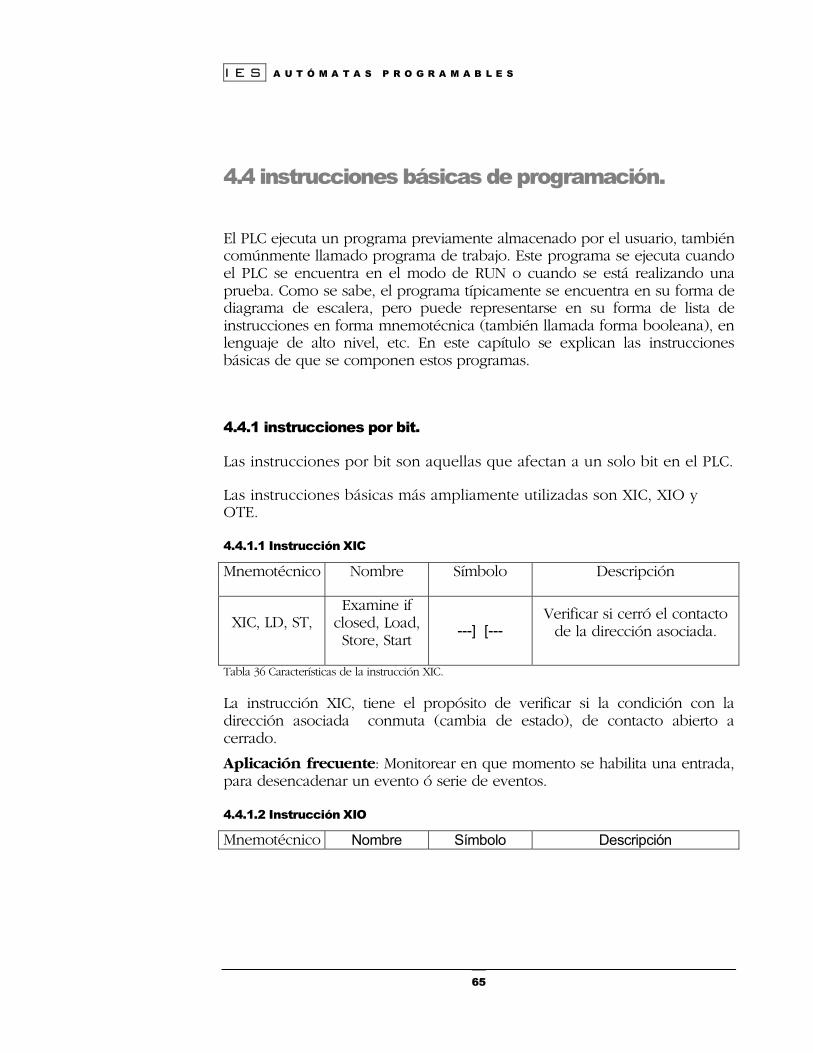
I E S A U T Ó M A T A S P R O G R A M A B L E S
65
4.4 instrucciones básicas de programación.
El PLC ejecuta un programa previamente almacenado por el usuario, también comúnmente llamado programa de trabajo. Este programa se ejecuta cuando el PLC se encuentra en el modo de RUN o cuando se está realizando una prueba. Como se sabe, el programa típicamente se encuentra en su forma de diagrama de escalera, pero puede representarse en su forma de lista de instrucciones en forma mnemotécnica (también llamada forma booleana), en lenguaje de alto nivel, etc. En este capítulo se explican las instrucciones básicas de que se componen estos programas.
4.4.1 instrucciones por bit.
Las instrucciones por bit son aquellas que afectan a un solo bit en el PLC.
Las instrucciones básicas más ampliamente utilizadas son XIC, XIO y OTE.
4.4.1.1 Instrucción XIC
Mnemotécnico Nombre Símbolo Descripción
XIC, LD, ST, Examine if
closed, Load, Store, Start
---] [--- Verificar si cerró el contacto
de la dirección asociada.
Tabla 36 Características de la instrucción XIC.
La instrucción XIC, tiene el propósito de verificar si la condición con la dirección asociada conmuta (cambia de estado), de contacto abierto a cerrado.
Aplicación frecuente: Monitorear en que momento se habilita una entrada, para desencadenar un evento ó serie de eventos.
4.4.1.2 Instrucción XIO
Mnemotécnico Nombre Símbolo Descripción
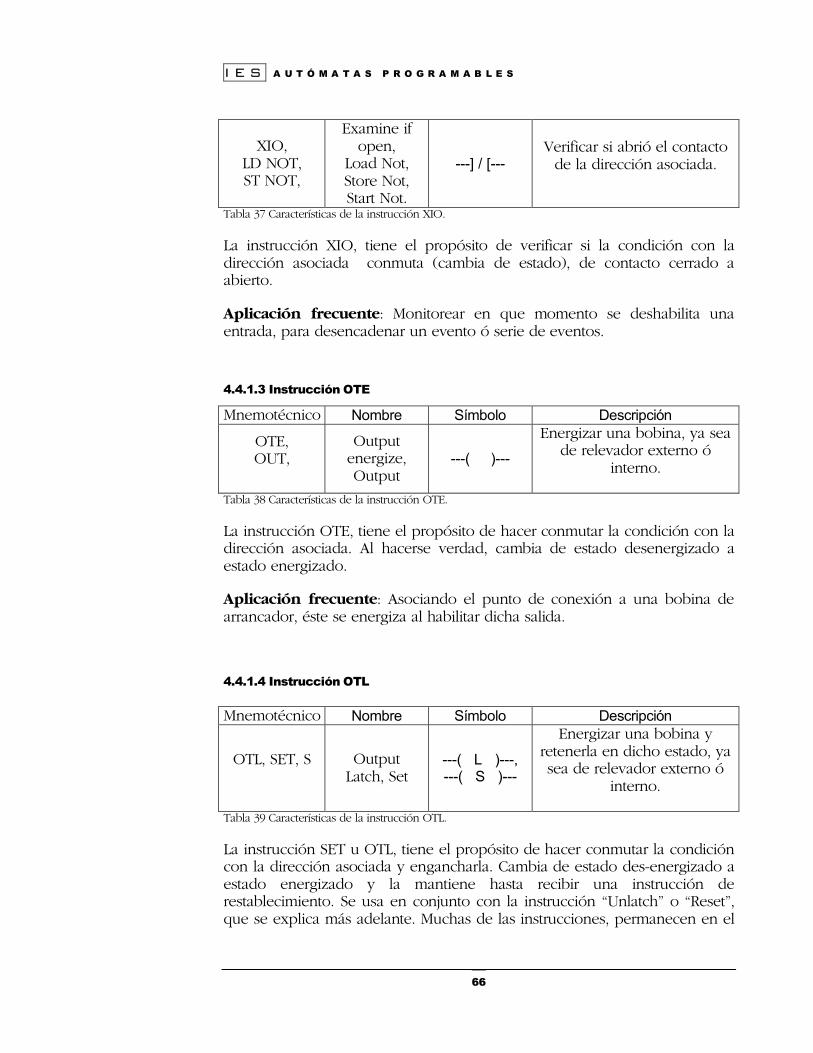
I E S A U T Ó M A T A S P R O G R A M A B L E S
66
XIO, LD NOT, ST NOT,
Examine if open,
Load Not, Store Not, Start Not.
---] / [--- Verificar si abrió el contacto
de la dirección asociada.
Tabla 37 Características de la instrucción XIO.
La instrucción XIO, tiene el propósito de verificar si la condición con la dirección asociada conmuta (cambia de estado), de contacto cerrado a abierto.
Aplicación frecuente: Monitorear en que momento se deshabilita una entrada, para desencadenar un evento ó serie de eventos.
4.4.1.3 Instrucción OTE
Mnemotécnico Nombre Símbolo Descripción
OTE, OUT,
Output energize, Output
---( )---
Energizar una bobina, ya sea de relevador externo ó
interno.
Tabla 38 Características de la instrucción OTE.
La instrucción OTE, tiene el propósito de hacer conmutar la condición con la dirección asociada. Al hacerse verdad, cambia de estado desenergizado a estado energizado.
Aplicación frecuente: Asociando el punto de conexión a una bobina de arrancador, éste se energiza al habilitar dicha salida.
4.4.1.4 Instrucción OTL Mnemotécnico Nombre Símbolo Descripción
OTL, SET, S
Output Latch, Set
---( L )---, ---( S )---
Energizar una bobina y retenerla en dicho estado, ya sea de relevador externo ó
interno.
Tabla 39 Características de la instrucción OTL.
La instrucción SET u OTL, tiene el propósito de hacer conmutar la condición con la dirección asociada y engancharla. Cambia de estado des-energizado a estado energizado y la mantiene hasta recibir una instrucción de restablecimiento. Se usa en conjunto con la instrucción “Unlatch” o “Reset”, que se explica más adelante. Muchas de las instrucciones, permanecen en el
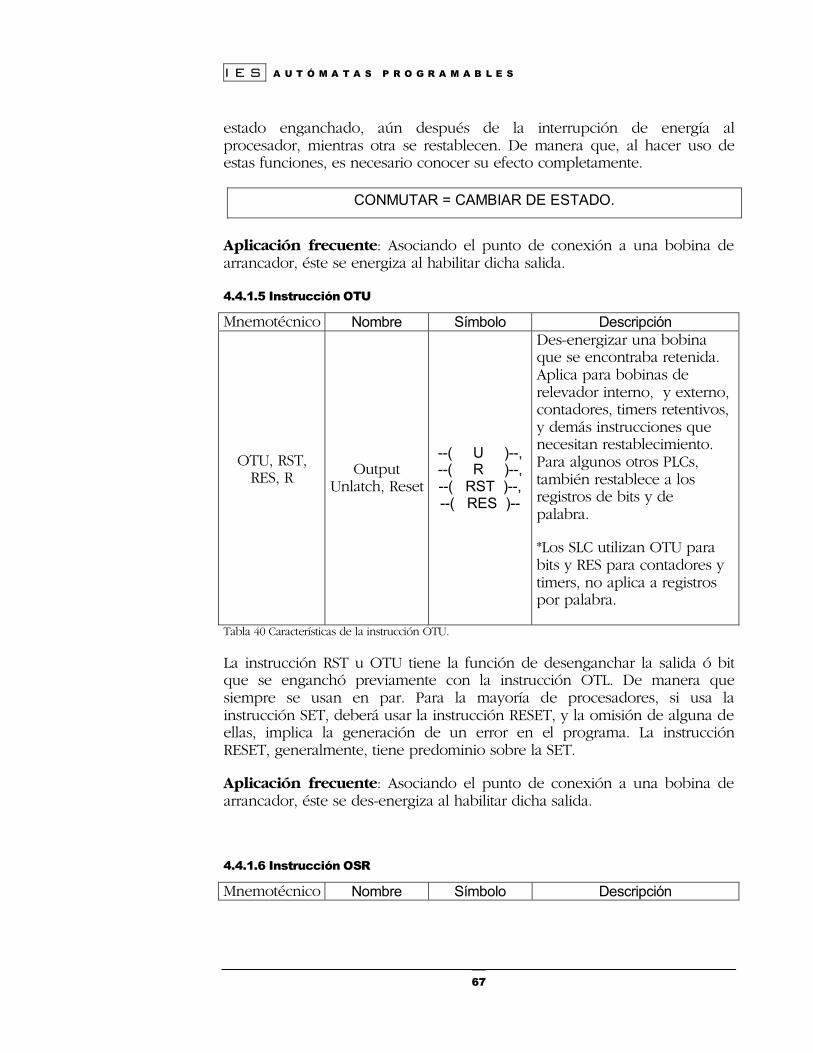
I E S A U T Ó M A T A S P R O G R A M A B L E S
67
estado enganchado, aún después de la interrupción de energía al procesador, mientras otra se restablecen. De manera que, al hacer uso de estas funciones, es necesario conocer su efecto completamente.
CONMUTAR = CAMBIAR DE ESTADO.
Aplicación frecuente: Asociando el punto de conexión a una bobina de arrancador, éste se energiza al habilitar dicha salida.
4.4.1.5 Instrucción OTU
Mnemotécnico Nombre Símbolo Descripción
OTU, RST, RES, R
Output Unlatch, Reset
--( U )--, --( R )--, --( RST )--, --( RES )--
Des-energizar una bobina que se encontraba retenida. Aplica para bobinas de relevador interno, y externo, contadores, timers retentivos, y demás instrucciones que necesitan restablecimiento. Para algunos otros PLCs, también restablece a los registros de bits y de palabra.
*Los SLC utilizan OTU para bits y RES para contadores y timers, no aplica a registros por palabra.
Tabla 40 Características de la instrucción OTU.
La instrucción RST u OTU tiene la función de desenganchar la salida ó bit que se enganchó previamente con la instrucción OTL. De manera que siempre se usan en par. Para la mayoría de procesadores, si usa la instrucción SET, deberá usar la instrucción RESET, y la omisión de alguna de ellas, implica la generación de un error en el programa. La instrucción RESET, generalmente, tiene predominio sobre la SET.
Aplicación frecuente: Asociando el punto de conexión a una bobina de arrancador, éste se des-energiza al habilitar dicha salida.
4.4.1.6 Instrucción OSR
Mnemotécnico Nombre Símbolo Descripción
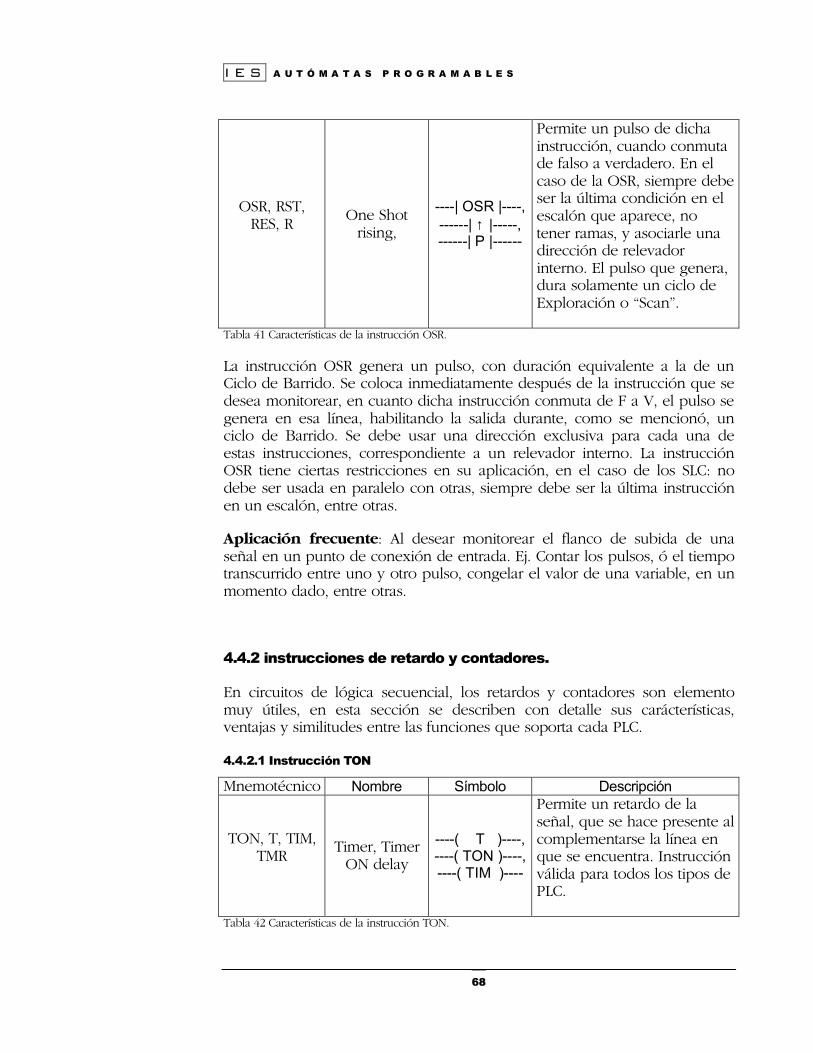
I E S A U T Ó M A T A S P R O G R A M A B L E S
68
OSR, RST, RES, R
One Shot rising,
----| OSR |----, ------| ↑ |-----, ------| P |------
Permite un pulso de dicha instrucción, cuando conmuta de falso a verdadero. En el caso de la OSR, siempre debe ser la última condición en el escalón que aparece, no tener ramas, y asociarle una dirección de relevador interno. El pulso que genera, dura solamente un ciclo de Exploración o “Scan”.
Tabla 41 Características de la instrucción OSR.
La instrucción OSR genera un pulso, con duración equivalente a la de un Ciclo de Barrido. Se coloca inmediatamente después de la instrucción que se desea monitorear, en cuanto dicha instrucción conmuta de F a V, el pulso se genera en esa línea, habilitando la salida durante, como se mencionó, un ciclo de Barrido. Se debe usar una dirección exclusiva para cada una de estas instrucciones, correspondiente a un relevador interno. La instrucción OSR tiene ciertas restricciones en su aplicación, en el caso de los SLC: no debe ser usada en paralelo con otras, siempre debe ser la última instrucción en un escalón, entre otras.
Aplicación frecuente: Al desear monitorear el flanco de subida de una señal en un punto de conexión de entrada. Ej. Contar los pulsos, ó el tiempo transcurrido entre uno y otro pulso, congelar el valor de una variable, en un momento dado, entre otras.
4.4.2 instrucciones de retardo y contadores.
En circuitos de lógica secuencial, los retardos y contadores son elemento muy útiles, en esta sección se describen con detalle sus carácterísticas, ventajas y similitudes entre las funciones que soporta cada PLC.
4.4.2.1 Instrucción TON
Mnemotécnico Nombre Símbolo Descripción
TON, T, TIM, TMR
Timer, Timer ON delay
----( T )----, ----( TON )----, ----( TIM )----
Permite un retardo de la señal, que se hace presente al complementarse la línea en que se encuentra. Instrucción válida para todos los tipos de PLC.
Tabla 42 Características de la instrucción TON.
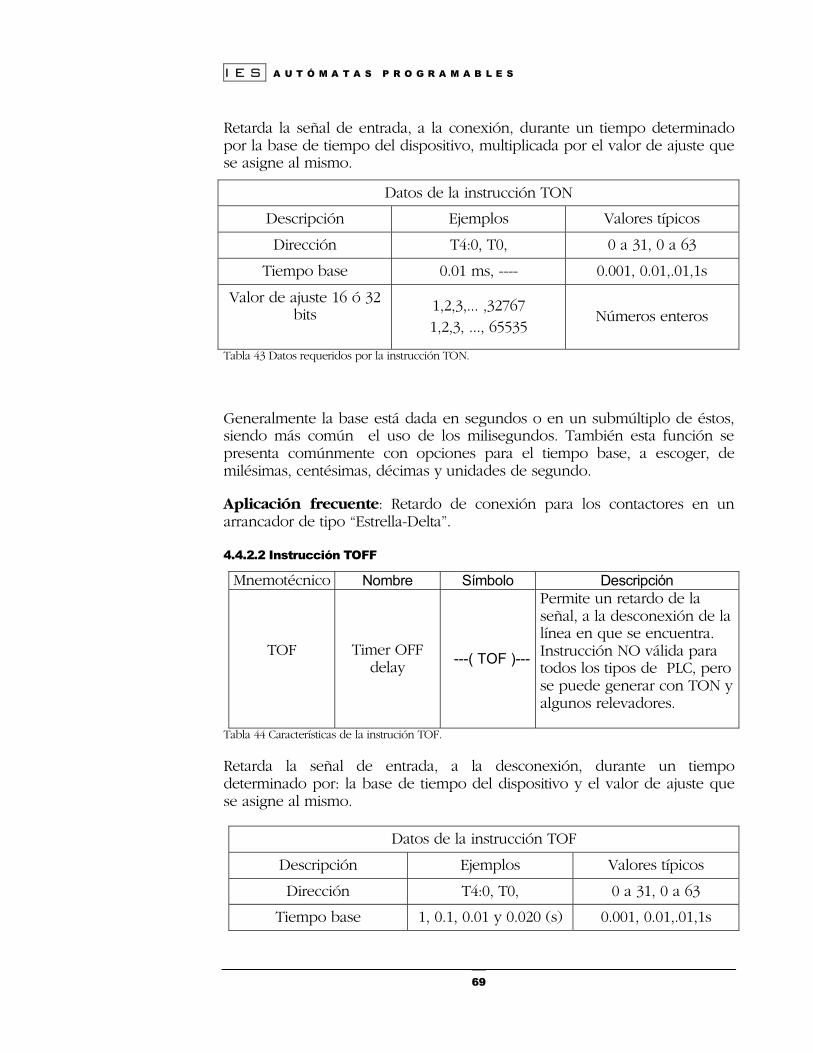
I E S A U T Ó M A T A S P R O G R A M A B L E S
69
Retarda la señal de entrada, a la conexión, durante un tiempo determinado por la base de tiempo del dispositivo, multiplicada por el valor de ajuste que se asigne al mismo.
Datos de la instrucción TON
Descripción Ejemplos Valores típicos
Dirección T4:0, T0, 0 a 31, 0 a 63
Tiempo base 0.01 ms, ---- 0.001, 0.01,.01,1s
Valor de ajuste 16 ó 32 bits
1,2,3,... ,32767 1,2,3, ..., 65535
Números enteros
Tabla 43 Datos requeridos por la instrucción TON.
Generalmente la base está dada en segundos o en un submúltiplo de éstos, siendo más común el uso de los milisegundos. También esta función se presenta comúnmente con opciones para el tiempo base, a escoger, de milésimas, centésimas, décimas y unidades de segundo.
Aplicación frecuente: Retardo de conexión para los contactores en un arrancador de tipo “Estrella-Delta”.
4.4.2.2 Instrucción TOFF
Mnemotécnico Nombre Símbolo Descripción
TOF
Timer OFF delay ---( TOF )---
Permite un retardo de la señal, a la desconexión de la línea en que se encuentra. Instrucción NO válida para todos los tipos de PLC, pero se puede generar con TON y algunos relevadores.
Tabla 44 Características de la instrución TOF.
Retarda la señal de entrada, a la desconexión, durante un tiempo determinado por: la base de tiempo del dispositivo y el valor de ajuste que se asigne al mismo.
Datos de la instrucción TOF
Descripción Ejemplos Valores típicos
Dirección T4:0, T0, 0 a 31, 0 a 63
Tiempo base 1, 0.1, 0.01 y 0.020 (s) 0.001, 0.01,.01,1s
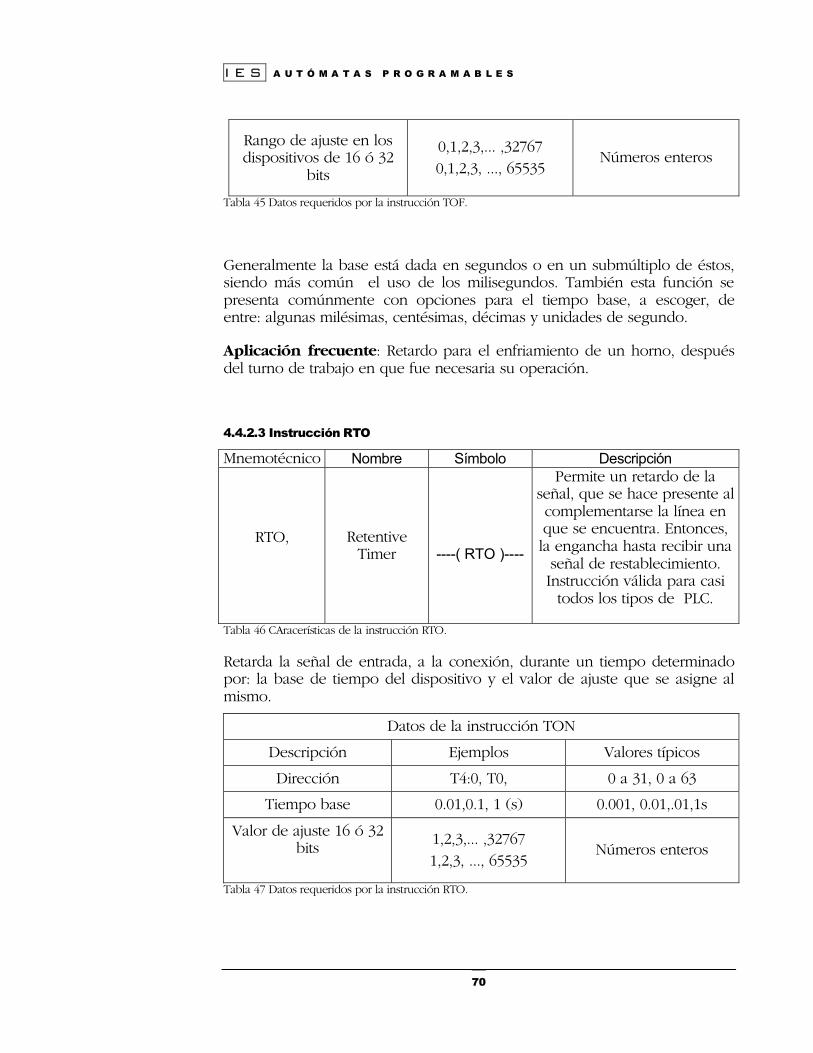
I E S A U T Ó M A T A S P R O G R A M A B L E S
70
Rango de ajuste en los dispositivos de 16 ó 32
bits
0,1,2,3,... ,32767 0,1,2,3, ..., 65535
Números enteros
Tabla 45 Datos requeridos por la instrucción TOF.
Generalmente la base está dada en segundos o en un submúltiplo de éstos, siendo más común el uso de los milisegundos. También esta función se presenta comúnmente con opciones para el tiempo base, a escoger, de entre: algunas milésimas, centésimas, décimas y unidades de segundo.
Aplicación frecuente: Retardo para el enfriamiento de un horno, después del turno de trabajo en que fue necesaria su operación.
4.4.2.3 Instrucción RTO
Mnemotécnico Nombre Símbolo Descripción
RTO,
Retentive Timer
----( RTO )----
Permite un retardo de la señal, que se hace presente al complementarse la línea en que se encuentra. Entonces, la engancha hasta recibir una
señal de restablecimiento. Instrucción válida para casi
todos los tipos de PLC.
Tabla 46 CAracerísticas de la instrucción RTO.
Retarda la señal de entrada, a la conexión, durante un tiempo determinado por: la base de tiempo del dispositivo y el valor de ajuste que se asigne al mismo.
Datos de la instrucción TON
Descripción Ejemplos Valores típicos
Dirección T4:0, T0, 0 a 31, 0 a 63
Tiempo base 0.01,0.1, 1 (s) 0.001, 0.01,.01,1s
Valor de ajuste 16 ó 32 bits
1,2,3,... ,32767 1,2,3, ..., 65535
Números enteros
Tabla 47 Datos requeridos por la instrucción RTO.
I E S A U T Ó M A T A S P R O G R A M A B L E S
71
La diferencia con el TON, es que esta instrucción incluye la función de retención ó enclavamiento de contactos, de forma similar a la OTL, de manera que necesita también una instrucción de restablecimiento para regresar a su condición normal. Generalmente la base está dada en segundos o en un submúltiplo de éstos, siendo más común el uso de los milisegundos. También esta función se presenta comúnmente con opciones para el tiempo base, a escoger, de milésimas, centésimas, décimas y unidades de segundo. En caso de interrumpir la energía al procesador, o la línea que habilita esta función, en el diagrama de escalera, el TIMER retiene el valor acumulado, y al reiniciar, parte de el valor almacenado.
Aplicación frecuente: Cuando en un control secuencial se desea retardar un paso, y evitar que se reactive, antes del siguiente paso que lo restablece.
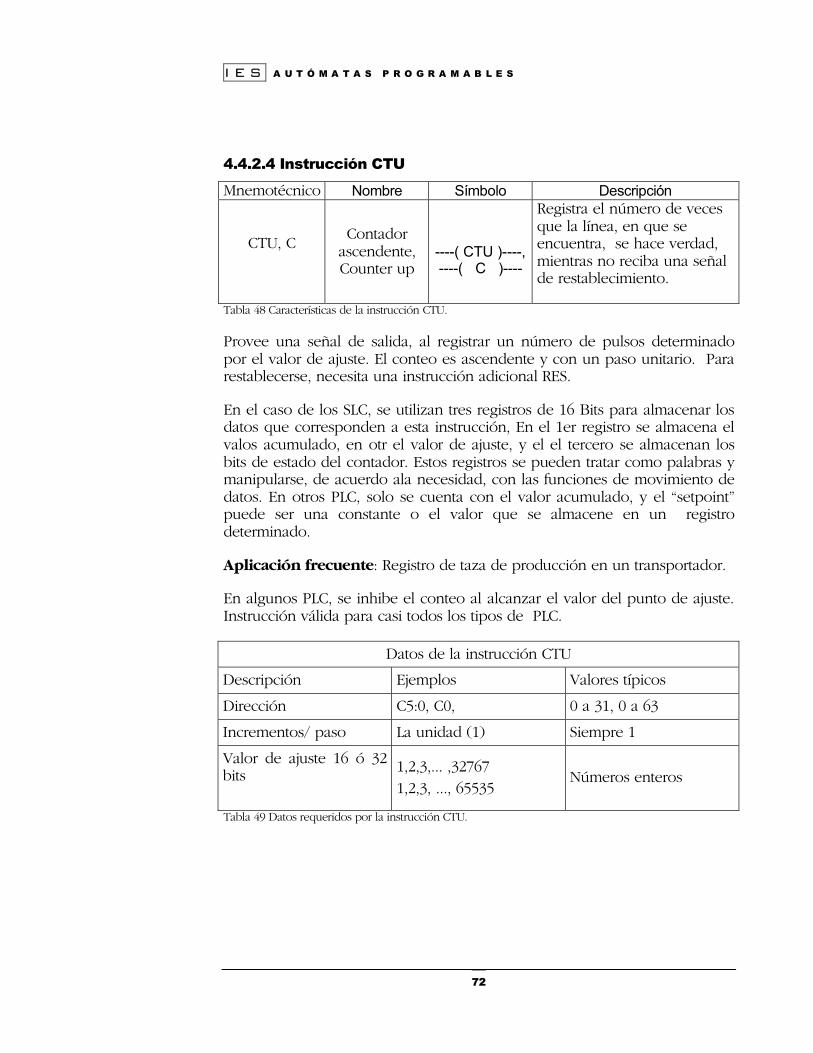
I E S A U T Ó M A T A S P R O G R A M A B L E S
72
4.4.2.4 Instrucción CTU
Mnemotécnico Nombre Símbolo Descripción
CTU, C
Contador ascendente, Counter up
----( CTU )----, ----( C )----
Registra el número de veces que la línea, en que se encuentra, se hace verdad, mientras no reciba una señal de restablecimiento.
Tabla 48 Características de la instrucción CTU.
Provee una señal de salida, al registrar un número de pulsos determinado por el valor de ajuste. El conteo es ascendente y con un paso unitario. Para restablecerse, necesita una instrucción adicional RES.
En el caso de los SLC, se utilizan tres registros de 16 Bits para almacenar los datos que corresponden a esta instrucción, En el 1er registro se almacena el valos acumulado, en otr el valor de ajuste, y el el tercero se almacenan los bits de estado del contador. Estos registros se pueden tratar como palabras y manipularse, de acuerdo ala necesidad, con las funciones de movimiento de datos. En otros PLC, solo se cuenta con el valor acumulado, y el “setpoint” puede ser una constante o el valor que se almacene en un registro determinado.
Aplicación frecuente: Registro de taza de producción en un transportador.
En algunos PLC, se inhibe el conteo al alcanzar el valor del punto de ajuste. Instrucción válida para casi todos los tipos de PLC.
Datos de la instrucción CTU
Descripción Ejemplos Valores típicos
Dirección C5:0, C0, 0 a 31, 0 a 63
Incrementos/ paso La unidad (1) Siempre 1
Valor de ajuste 16 ó 32 bits
1,2,3,... ,32767 1,2,3, ..., 65535
Números enteros
Tabla 49 Datos requeridos por la instrucción CTU.
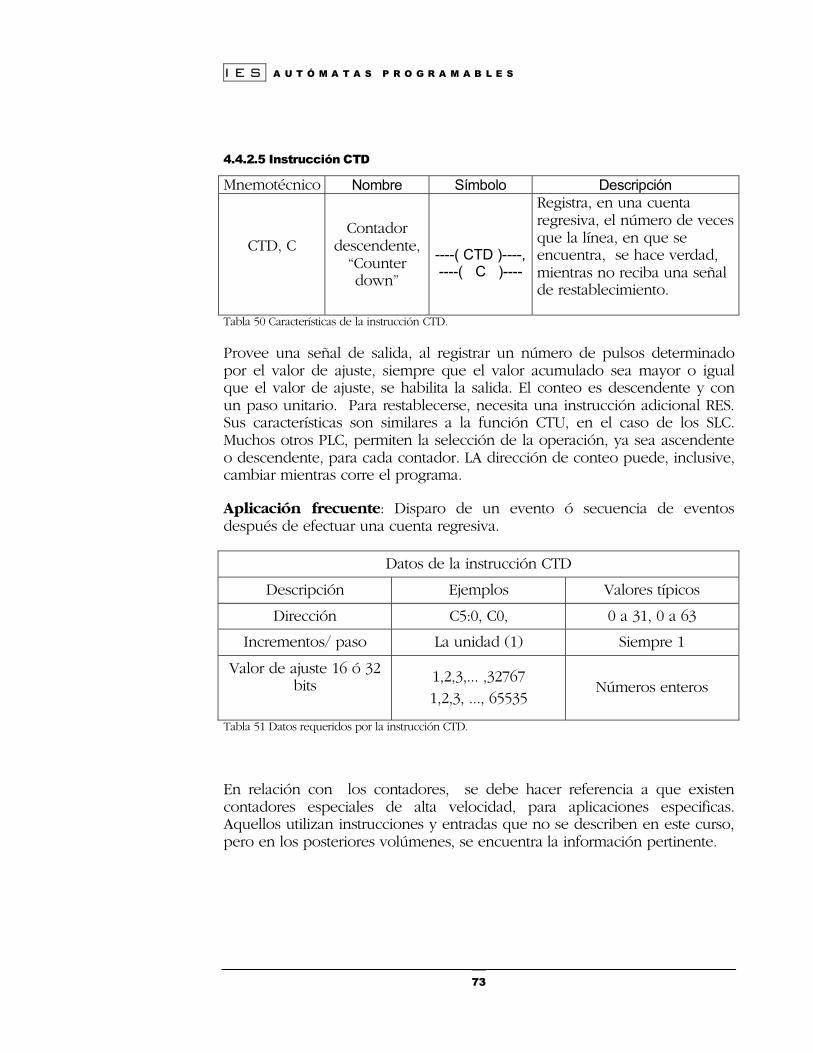
I E S A U T Ó M A T A S P R O G R A M A B L E S
73
4.4.2.5 Instrucción CTD
Mnemotécnico Nombre Símbolo Descripción
CTD, C
Contador descendente,
“Counter down”
----( CTD )----, ----( C )----
Registra, en una cuenta regresiva, el número de veces que la línea, en que se encuentra, se hace verdad, mientras no reciba una señal de restablecimiento.
Tabla 50 Características de la instrucción CTD.
Provee una señal de salida, al registrar un número de pulsos determinado por el valor de ajuste, siempre que el valor acumulado sea mayor o igual que el valor de ajuste, se habilita la salida. El conteo es descendente y con un paso unitario. Para restablecerse, necesita una instrucción adicional RES. Sus características son similares a la función CTU, en el caso de los SLC. Muchos otros PLC, permiten la selección de la operación, ya sea ascendente o descendente, para cada contador. LA dirección de conteo puede, inclusive, cambiar mientras corre el programa.
Aplicación frecuente: Disparo de un evento ó secuencia de eventos después de efectuar una cuenta regresiva.
Datos de la instrucción CTD
Descripción Ejemplos Valores típicos
Dirección C5:0, C0, 0 a 31, 0 a 63
Incrementos/ paso La unidad (1) Siempre 1
Valor de ajuste 16 ó 32 bits
1,2,3,... ,32767 1,2,3, ..., 65535
Números enteros
Tabla 51 Datos requeridos por la instrucción CTD.
En relación con los contadores, se debe hacer referencia a que existen contadores especiales de alta velocidad, para aplicaciones especificas. Aquellos utilizan instrucciones y entradas que no se describen en este curso, pero en los posteriores volúmenes, se encuentra la información pertinente.
I E S A U T Ó M A T A S P R O G R A M A B L E S
74
4.4.3 Sistemas de control secuencial
Los sistemas secuenciales, consisten básicamente, de un conjunto de estados posibles. Tales estados son combinados en determinada secuencia por medio del controlador, y se tiene entonces un sistema de control automático.
La base, entonces, para determinar las funciones del controlador consiste de dos tareas básicas:
• La definición de los estados y su identificación.
• El establecimiento de la secuencia o secuencias a seguir, con la consecuente estructuración y desarrollo del programa con todas las etapas que ésto involucra.
Para eslabonar los estados, se hace uso de la lógica de memoria, descrita previamente donde cada estado que ocurre “se recuerda” y restablece al estado previo. Luego, en base a la secuencia preestablecida, se lleva el sistema al siguiente estado, de manera sucesiva. Esta cadena de estados, se repite cíclicamente, hasta que sea intencionalmente interrumpida, ya sea por finalizar el proceso, el turno, por ocurrir alguna alarma o algún otro evento determinado. Se debe mencionar que tal proceso puede ser síncrono o asíncrono, esto es: que cambien de acuerdo a los estados previos y la secuencia preestablecida ó que cambien considerando una señal se sincronía (reloj).
El establecimiento de los estados, con todo detalle, se sobreentiende que es un requerimiento crítico en los sistemas de control secuencial. Es conveniente seguir un método apropiado para establecer claramente la secuencia y los estados del sistema a controlar.
Para establecer la secuencia del control de proceso, actualmente se hace amplio uso de los denominados “Diagrama de Flujo secuencial” (SFC). El equipo que incorpora este tipo de programación está llegando al mercado recientemente, y aunque la finalidad es que sea “estándar”, en realidad cada fabricante, hasta hoy presenta su propia versión. Sin embargo , hay que reconocer que existen grandes similitudes entre estas, pues están basadas en la misma norma. Algunos nombres comerciales con que se conoce éste método es Grafcet (de Módicon) y Funktion Plan (de Siemens), el fabricante Mitsubishi, aunque especifica que existen diferencias entre el SFC descrito por la norma y su versión STL, describe también sus abundantes similitudes.
I E S A U T Ó M A T A S P R O G R A M A B L E S
75
4.4.4 Práctica 2.
En el manual de prácticas, como práctica #12 se ilustra, con un ejemplo de éste, hoy popular método. El ejemplo es presentado como programación en STL,. Para la serie Fx de PLCs, así como para el SLC.
Nivel 1. Ejercicio 1. Módulo 870-B1, con operación secuencial de los “transfer”.
Nivel 2. Ejercicio 2. Módulo 870-B1, con operación simultánea de los “transfer”.
I E S A U T Ó M A T A S P R O G R A M A B L E S
76
Alambrado para los módulos I/O digitales
Los módulos I/O, típicos: de lógica negativa y positiva, tienen diversas variantes entre los disponibles comerciales, además de que los dispositivos primarios, así como aquellos que se interconectan con el módulo de salida del PLC, son ofertados en sus versiones NPN y PNP, de manera que es necesario conocer las diferencias a fin de determinar la forma correcta de alambrado.
5.1 Módulos de A.C. Conocemos que un módulo de salidas de tipo relevador puede ser alambrado para AC ó DC, dentro de las especificaciones correspondientes. En el caso de alambrarlo para AC, se siguen las normas de alambrado y codificación vigentes. Considerando el alambrado típico en diagrama de escalera usado para los circuitos de control basados en relevadores.
Capítulo
5
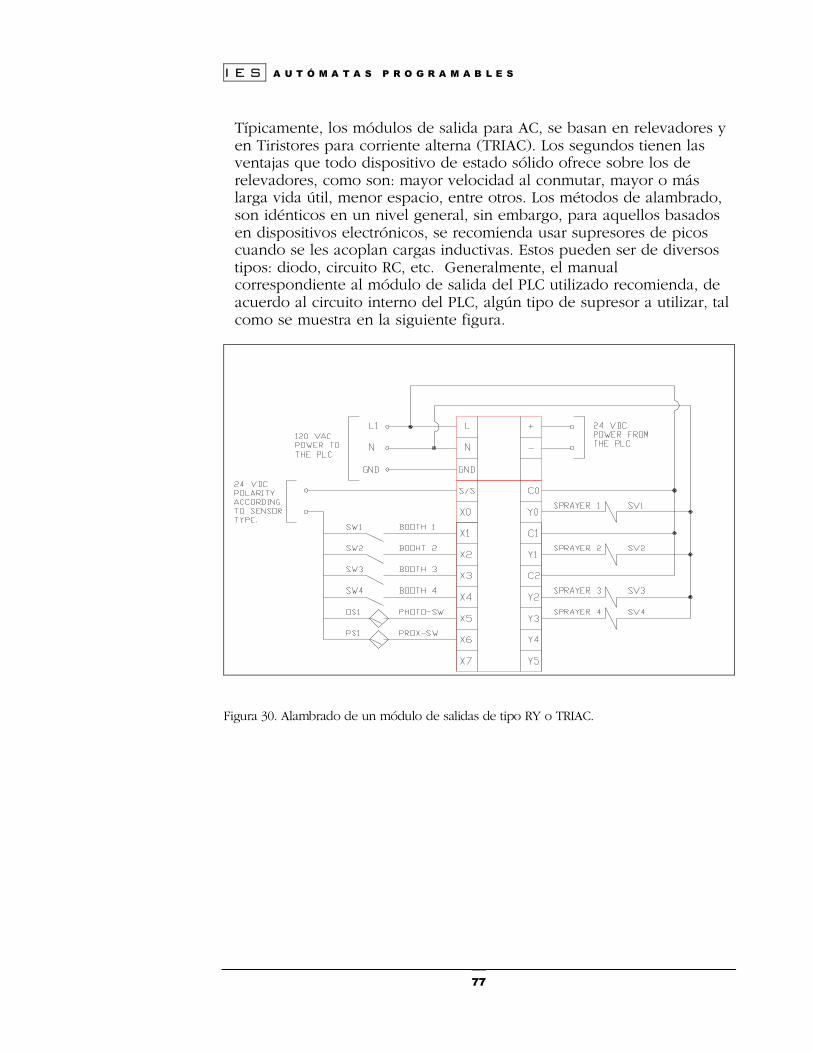
I E S A U T Ó M A T A S P R O G R A M A B L E S
77
Típicamente, los módulos de salida para AC, se basan en relevadores y en Tiristores para corriente alterna (TRIAC). Los segundos tienen las ventajas que todo dispositivo de estado sólido ofrece sobre los de relevadores, como son: mayor velocidad al conmutar, mayor o más larga vida útil, menor espacio, entre otros. Los métodos de alambrado, son idénticos en un nivel general, sin embargo, para aquellos basados en dispositivos electrónicos, se recomienda usar supresores de picos cuando se les acoplan cargas inductivas. Estos pueden ser de diversos tipos: diodo, circuito RC, etc. Generalmente, el manual correspondiente al módulo de salida del PLC utilizado recomienda, de acuerdo al circuito interno del PLC, algún tipo de supresor a utilizar, tal como se muestra en la siguiente figura.
Figura 30. Alambrado de un módulo de salidas de tipo RY o TRIAC.
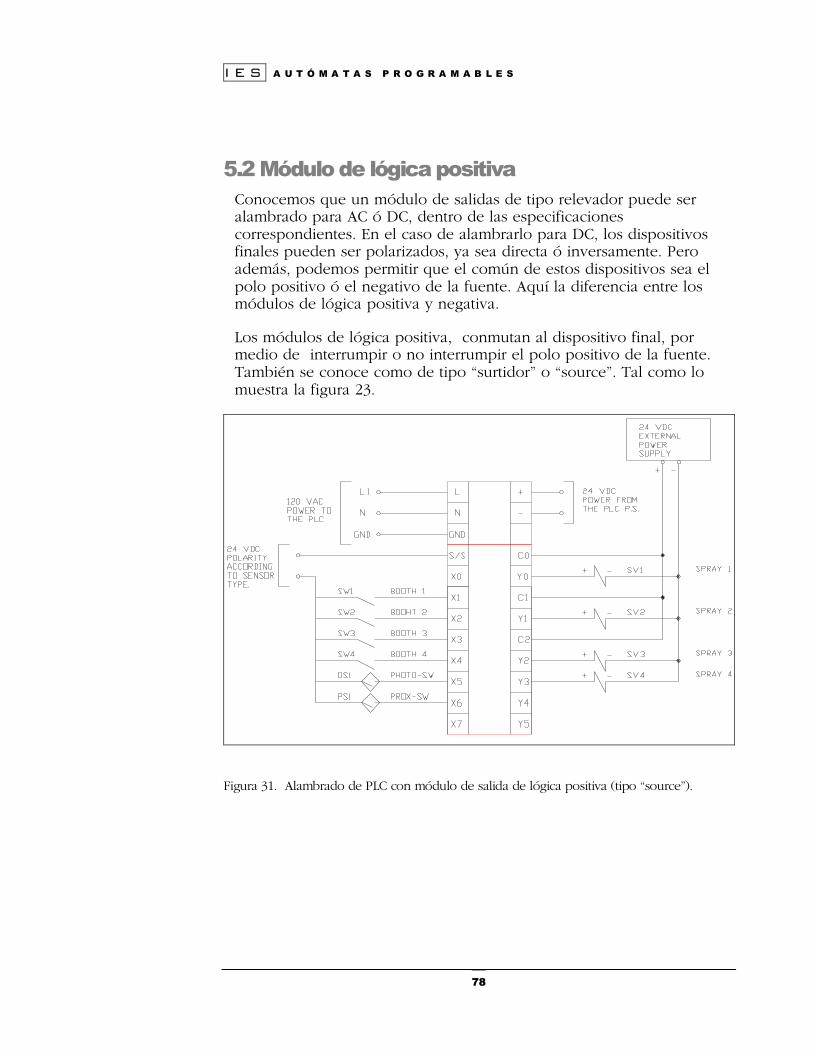
I E S A U T Ó M A T A S P R O G R A M A B L E S
78
5.2 Módulo de lógica positiva Conocemos que un módulo de salidas de tipo relevador puede ser alambrado para AC ó DC, dentro de las especificaciones correspondientes. En el caso de alambrarlo para DC, los dispositivos finales pueden ser polarizados, ya sea directa ó inversamente. Pero además, podemos permitir que el común de estos dispositivos sea el polo positivo ó el negativo de la fuente. Aquí la diferencia entre los módulos de lógica positiva y negativa.
Los módulos de lógica positiva, conmutan al dispositivo final, por medio de interrumpir o no interrumpir el polo positivo de la fuente. También se conoce como de tipo “surtidor” o “source”. Tal como lo muestra la figura 23.
Figura 31. Alambrado de PLC con módulo de salida de lógica positiva (tipo “source”).
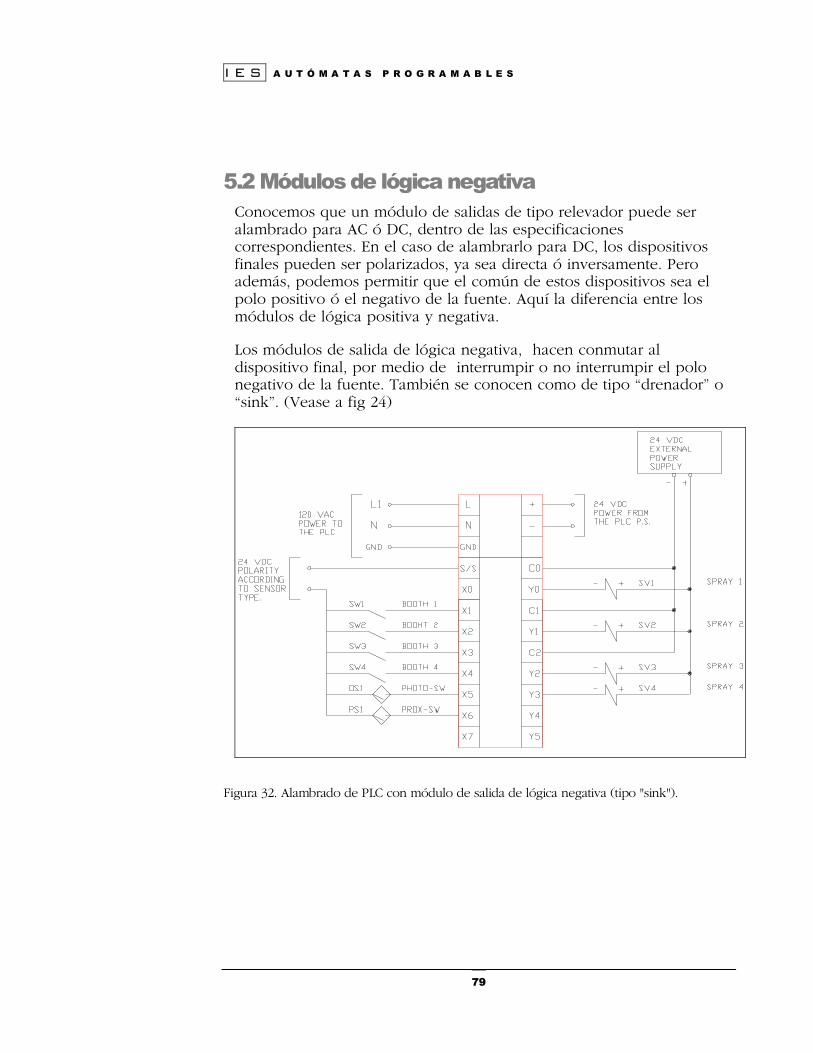
I E S A U T Ó M A T A S P R O G R A M A B L E S
79
5.2 Módulos de lógica negativa Conocemos que un módulo de salidas de tipo relevador puede ser alambrado para AC ó DC, dentro de las especificaciones correspondientes. En el caso de alambrarlo para DC, los dispositivos finales pueden ser polarizados, ya sea directa ó inversamente. Pero además, podemos permitir que el común de estos dispositivos sea el polo positivo ó el negativo de la fuente. Aquí la diferencia entre los módulos de lógica positiva y negativa.
Los módulos de salida de lógica negativa, hacen conmutar al dispositivo final, por medio de interrumpir o no interrumpir el polo negativo de la fuente. También se conocen como de tipo “drenador” o “sink”. (Vease a fig 24)
Figura 32. Alambrado de PLC con módulo de salida de lógica negativa (tipo "sink").
I E S A U T Ó M A T A S P R O G R A M A B L E S
80
Referencias • LEVINE, The control Handbook, 1996, CRC press.
• TOKHEIM, Principios digitales, Mc Graw Hill, 1990.
• CREUS, Instrumentación Industrial, Alfaomega-Marcombo, 1998
• Diversos manuales de PLCs.
I E S A U T Ó M A T A S P R O G R A M A B L E S
81
Glosario En esta sección se definen los términos, no comunes, usados en el documento.
• Alcance de un instrumento de medición (“Span” o “Scope”). Diferencia algebraica (Resta) entre los valores límite (superior e inferior) que dicho instrumento es capaz de registrar (campo de medida).
• Autómata programable. Equivalente de Controlador Lógico programable ó PLC.
• Campo de medida (Range ). Espectro de la capacidad de medida.
• CkP (Clock Pulses)= Pulsos de reloj
• Direccionar (To address). Asignar una forma o nomenclatura de identificación específica, o sea “una dirección”, a un punto de conexión, bit ó dispositivo. Dicha dirección debe ser única. No existe, bajo ninguna circunstancia, dos dispositivos, o puntos de conexión, con la misma dirección en un solo sistema.
• Error. Diferencia entre el valor medido y el valor real de la variable del proceso en cuestión, o planta controlada.
• Exactitud. Es la cualidad de la medición realizada, ó del instrumento, de acercarse al valor real (en el valor medido).
• Histéresis (Hysteresis). Es la diferencia máxima observada en los valores indicados., para el mismo valor cualquiera del espectro. Generalmente debido a la inercia, se observa la diferencia o retraso del efecto de la compensación.
• Lenguaje de alto nivel. Formato de representación de instrucciones y datos parecido al lenguaje humano (Inglés), y que por medio de un compilador integrado, la computadora es capaz de interpretar.
• Lenguaje de máquina. Se entiende como el conjunto de instrucciones que son suceptibles de representarse en código binario, y que el microprocesador ejecuta con naturalidad, por estar diseñado con ese fín.
• Microprocesador (Microprocessor). Dispositivo electrónico de estado sólido que integra una enorme cantidad de circuitos, capaz de
I E S A U T Ó M A T A S P R O G R A M A B L E S
82
manipular datos, de acuerdo a instrucciones lógicas predefinidas. Dichos datos, así como la secuencia de instrucciones (Programa) son comunicados al dispositivo por medio de circuitos externos, principalmente de memoria.
• Mnemotécnica. Técnicas para desarrollar o mejorar la memoria.
• Mnemónicos ó Mnemotecnismos (Mnemonics). Terminos ó frases cortas que permiten recordar fácilmente la instrucción que representan, aún cuando no son explícitos.
• OHC= Transportador aéreo
• Ordenador. Equivalente de Computador o Computadora Personal (PC), generalmente de sobremesa ó portatil.
• OS1= Sensor Optoelectrónico 1
• PC = Computador
• PLC= Controlador Lógico Programable (En ocasiones PC).
• Precisión. Es la tolerancia admisible en la medida (en porcentaje ó unidades de medida).
• Presostato. Interruptor de presión, con diferencial, para el control de presión tipo “todo-nada” en un depósito.
• PS1= Detector de proximidad 1
• Pseudocódigo. Representación, con mnemotécnismos, de las instrucciones que el microprocesador es capaz de ejecutar.
• Reciprocator= Dispositivo que genera movimiento lineal oscilatorio, generalmente en un eje vertical.
• Relevador interno (Internal relay, bit, register). Espacio de memoria, en el interior del PLC, capaz de almacenar una cantidad de información equivalente a un bit.
• Repetibilidad. Es la capacidad de reproducción de los valores de salida del instrumento para aquellos valores de la variable que son idénticos, en las mismas condiciones de servicio y en el mismo sentido de variación, durante todo el campo de aplicación.
I E S A U T Ó M A T A S P R O G R A M A B L E S
83
• SEI= IES= Sistemas Electromecánicos Inteligentes
• Sensibilidad. Es la razón entre el incremento de la lectura y el incremento de la variable que la ocasiona.
• SW = Interruptor
• Zona muerta (Dead band). Es el campo de valores de la variable que no logra hacer variar la indicación de la señal de salida del instrumento.

84
D E S A R R OL L O D E S O F T W A RE P A R A AP L I C A CI O N E S I N DU S T RI A L ES
Curso de Autómatas Programables
Nota
Todos los ejemplos, prácticas, diagramas, programas, etc, así como las aplicaciones presentadas en este documento, tienen un objetivo didáctico y han sido adaptadas para tal uso. No deberán ser aplicadas -tal como están- en aplicaciones industriales, hasta que hayan sido analizadas, adaptadas perfectamente al proceso, y aprobadas por personal certificado como competente en las áreas correspondientes. El productor del presenta material no asume, por la tanto, ningún nivel de responsabilidad por el uso inadecuado de la información presentada.
IES Venancio Bravo Loma Gpe 11324-B, Fracc. Virreyes • Tijuana, B.C. Teléfono 52 (664) 658 1358 • Fax 52 (664) 645 3483
85
http://www.intelligentes.com; [email protected] i MODICON es propiedad de: Schneider Electric.
ii Allen Bradley, SLC, Micrologix, PLC5, SLC500, AB, PCIS, RS Logix, son propiedad de: Rockwell,Inc.
iii Aromat, NAIS, FP0, FP1, FP2, FP2SH, FP10 son propiedad de: Matsushita Electric, Corp.
iv Mitsubishi, GX/FX Developer, series FX1s, son propiedad de: Mitsubishi Eletric, Corp. v Omron, PCM1A son propiedad de: Omron Electronics, Inc.
vi Schneider Electric, Modicon, TSX, Premium, Son propiedad del Grupo Schneider, o Schneider Automation Inc.
vii Siemens, es propiedad de: Siemens Energy and Automation Inc.
* Todos los nombres, marcas, series, familias, tal como los mencionados arriba, son propiedad de la empresa correspondiente y se mencionan en este documento como mera referencia a su producto para describir o resaltar ciertas características, sin ningún tipo vinculo adicional.
viii Tabla complementada con información de:
TOKHEIM, Principios Digitales. Ed. Mc Graw Hill, Serie Schaums. PP 2-20
* El autor no reclama derecho alguno sobre las marcas ni posee contratos de ningún tipo con los fabricantes de los dispositivos ó productos mencionados en este documento. Aquellos que has sido nombrados, hace referencia a algunas características, particularidades, excepciones ó meros ejemplos. Para una referencia adecuada, se recomienda tomar los datos directamente de la literatura técnica proporcionada por el fabricante, en elentendido de que éste es un documento concebido para entrenamiento.