Improving Power Output for Vibration-Based Energy Scavengers
9
28 PERVASIVE computing Published by the IEEE CS and IEEE ComSoc ■ 1536-1268/05/$20.00 © 2005 IEEE ENERGY HARVESTING & CONSERVATION Improving Power Output for Vibration-Based Energy Scavengers P ervasive networks of wireless sensor and communication nodes have the potential to significantly impact soci- ety and create large market opportuni- ties. For such networks to achieve their full potential, however, we must develop practi- cal solutions for self-powering these autonomous electronic devices. Fixed-energy alternatives, such as batteries and fuel cells, are impractical for wireless devices with an expected lifetime of more than 10 years because the applications and environments in which these devices are deployed usually preclude changing or re-charging of batteries. There are several power-generating options for scavenging ambient environment energy, including solar energy, thermal gradients, and vibration-based devices. However, it’s unlikely that any single solution will satisfy all application spaces, as each method has its own constraints: solar methods require sufficient light energy, thermal gradients need sufficient temperature vari- ation, and vibration-based systems need sufficient vibration sources. Vibration sources are generally more ubiquitous, however, and can be readily found in inaccessible locations such as air ducts and building structures. We’ve modeled, designed, and built small can- tilever-based devices using piezoelectric materials that can scavenge power from low-level ambient vibration sources. Given appropriate power con- ditioning and capacitive storage, the resulting power source is sufficient to support networks of ultra-low-power, peer-to-peer wireless nodes. These devices have a fixed geometry and—to max- imize power output—we’ve individually designed them to operate as close as possible to the fre- quency of the driving surface on which they’re mounted. Here, we describe these devices and pre- sent some new designs that can be tuned to the fre- quency of the host surface, thereby expanding the method’s flexibility. We also discuss piezoelectric designs that use new geometries, some of which are microscale (approximately hundreds of microns). Problem overview We first analyze the wireless sensor nodes’ power requirements, and then investigate the var- ious sources that can fill those demands. Power demand Assuming an average distance between wireless sensor nodes of approximately 10 meters—which means that the radio transmitter should operate at approximately 0 dBm (decibels above or below 1 milliwatt)—the radio transmitter’s peak power consumption will be around 2 to 3 mW, depend- ing on its efficiency. Using ultra-low-power tech- niques, 1 the receiver should consume less than 1 mW. Including the dissipation of the sensors and Given appropriate power conditioning and capacitive storage, devices made from piezoelectric materials can scavenge power from low-level ambient sources to effectively support networks of ultra-low-power, peer- to-peer wireless nodes. Shad Roundy Australian National University Eli S. Leland, Jessy Baker, Eric Carleton, Elizabeth Reilly, Elaine Lai, Brian Otis, Jan M. Rabaey, and Paul K. Wright University of California, Berkeley V. Sundararajan University of California, Riverside
Transcript of Improving Power Output for Vibration-Based Energy Scavengers

28 PERVASIVEcomputing Published by the IEEE CS and IEEE ComSoc ■ 1536-1268/05/$20.00 © 2005 IEEE
E N E R G Y H A R V E S T I N G & C O N S E R V A T I O N
Improving Power Outputfor Vibration-BasedEnergy Scavengers
Pervasive networks of wireless sensorand communication nodes have thepotential to significantly impact soci-ety and create large market opportuni-ties. For such networks to achieve their
full potential, however, we must develop practi-cal solutions for self-powering these autonomouselectronic devices.
Fixed-energy alternatives, such as batteries andfuel cells, are impractical for wireless devices withan expected lifetime of more than 10 years becausethe applications and environments in which thesedevices are deployed usually preclude changing or
re-charging of batteries. Thereare several power-generatingoptions for scavenging ambientenvironment energy, includingsolar energy, thermal gradients,and vibration-based devices.However, it’s unlikely that anysingle solution will satisfy allapplication spaces, as eachmethod has its own constraints:solar methods require sufficientlight energy, thermal gradientsneed sufficient temperature vari-
ation, and vibration-based systems need sufficientvibration sources. Vibration sources are generallymore ubiquitous, however, and can be readilyfound in inaccessible locations such as air ductsand building structures.
We’ve modeled, designed, and built small can-
tilever-based devices using piezoelectric materialsthat can scavenge power from low-level ambientvibration sources. Given appropriate power con-ditioning and capacitive storage, the resultingpower source is sufficient to support networks ofultra-low-power, peer-to-peer wireless nodes.These devices have a fixed geometry and—to max-imize power output—we’ve individually designedthem to operate as close as possible to the fre-quency of the driving surface on which they’remounted. Here, we describe these devices and pre-sent some new designs that can be tuned to the fre-quency of the host surface, thereby expanding themethod’s flexibility. We also discuss piezoelectricdesigns that use new geometries, some of which aremicroscale (approximately hundreds of microns).
Problem overviewWe first analyze the wireless sensor nodes’
power requirements, and then investigate the var-ious sources that can fill those demands.
Power demandAssuming an average distance between wireless
sensor nodes of approximately 10 meters—whichmeans that the radio transmitter should operate atapproximately 0 dBm (decibels above or below 1milliwatt)—the radio transmitter’s peak powerconsumption will be around 2 to 3 mW, depend-ing on its efficiency. Using ultra-low-power tech-niques,1 the receiver should consume less than 1mW. Including the dissipation of the sensors and
Given appropriate power conditioning and capacitive storage, devicesmade from piezoelectric materials can scavenge power from low-levelambient sources to effectively support networks of ultra-low-power, peer-to-peer wireless nodes.
Shad RoundyAustralian National University
Eli S. Leland, Jessy Baker, EricCarleton, Elizabeth Reilly, ElaineLai, Brian Otis, Jan M. Rabaey, and Paul K. WrightUniversity of California, Berkeley
V. Sundararajan University of California, Riverside

peripheral circuitry, a maximum peakpower of 5 mW is quite reasonable.
For the radio to have a maximum datarate of 100 Kbits per second, and an aver-age traffic load per node of 1 Kbit/sec,every node communicates for approxi-mately 1 percent of its deployed life. Dur-ing the remaining 99 percent, the onlyactivities occurring in a node are back-ground tasks: low-speed timers, channelmonitoring, and node synchronization.If not handled appropriately, the latteris actually the node’s dominant power-consuming source. Combining peak andstandby power dissipation leads to anaverage power dissipation of approxi-mately 100 microwatts.
At an average power consumption of100 �W (an order of magnitude smallerthan any currently available node) a sen-sor node needs slightly more than 1 cm3
of lithium battery volume for one yearof operation, assuming that 100 percentof the battery’s charge is used. So, givena 1 cm3 size constraint, standard sensornode batteries must be replaced at leastevery nine months.2
Supply optionsAs Table 1 shows, vibration-based
devices compare well to other potentialenergy-scavenging sources, includingbatteries, fuel cells, and solar, tempera-ture, and pressure devices.2
Researchers have successfully built andtested vibration-based generators usingthree types of electromechanical trans-ducers: electromagnetic,3 electrostatic,4
and piezoelectric.5,6 The most effectivetransducer type depends, to a certainextent, on the specific application.Researchers often compare different meth-ods’ effectiveness on the basis of the energystorage density inherent to each transducertype. Table 2 compares three generatorson the basis of two energy densities:2
• Practical values represent what is cur-rently achievable with standard mate-rials and processes.
• Aggressive values represent what istheoretically possible.
In addition to energy density, threefurther considerations affect transducertechnology selection:
• Electrostatic transducers are morereadily implemented in standardmicro-machining processes.
• Electrostatic transducers require a sep-arate voltage source (such as a battery)to begin the conversion cycle.
• Electromagnetic transducers typicallyoutput AC voltages well below 1 voltin magnitude.
Based on the data presented in Table 2,we decided to focus our work on piezo-electric generators.
JANUARY–MARCH 2005 PERVASIVEcomputing 29
TABLE 1Energy and power sources comparisons.
Power Energy Power Secondary Voltage CommerciallyPower source (�W)/cm3 (Joules)/cm3 (�W)/cm3/yr storage needed? regulation? available?
Primary battery N/A 2,880 90 No No Yes
Secondary battery N/A 1,080 34 N/A No Yes
Micro fuel cell N/A 3,500 110 Maybe Maybe No
Ultracapacitor N/A 50–100 1.6–3.2 No Yes Yes
Heat engine 1 � 106 3,346 106 Yes Yes No
Radioactive (63Ni) 0.52 1,640 0.52 Yes Yes No
Solar (outside) 15,000* N/A N/A Usually Maybe Yes
Solar (inside) 10* N/A N/A Usually Maybe Yes
Temperature 40*† N/A N/A Usually Maybe Soon
Human power 330 N/A N/A Yes Yes No
Air flow 380‡ N/A N/A Yes Yes No
Pressure variation 17§ N/A N/A Yes Yes No
Vibrations 375 N/A N/A Yes Yes No
* Measured in power per square centimeter, rather than power per cubic centimeter.† Demonstrated from a 5ºC temperature differential.‡ Assumes an air velocity of 5 m/s and 5 percent conversion efficiency.§ Based on 1 cm3 closed volume of helium undergoing a 10ºC change once a day.
TABLE 2Energy storage density comparison.
Practical maximum Aggressive maximum Type (millijoules/cm3) (millijoules/cm3)
Piezoelectric 35.4 335
Electrostatic 4 44
Electromagnetic 24.8 400

ResultsAs the last row of Table 1 indicates,
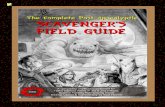
vibration sources can generate approxi-mately 375 �W/cm3. An initial vibrationmodel indicates that a 1 cm3 design cangenerate 375 �W from a vibration sourceof 2.5 m/s2 at 120 Hz.2 On the basis ofthis model, researchers fabricated someearly prototypes of tiny, piezoelectric can-tilevers (9 to 25 millimeters in length)with a relatively heavy mass on the freeend (see Figure 1).
When affixed to a vibrating surface,such as a wooden staircase or the insideof an air-conditioning duct, these pro-totypes scavenged and stored enoughenergy on a capacitor to power sensornodes. In recent tests, we also used the 1cm3 generator prototypes (Figures 1aand 1b) to power a 1.9 gigahertz radiotransmitter.1 The beacon was poweredat a duty cycle of 1 percent, whichresulted in an average power consump-
tion of 120 �W. Figure 1c shows a vari-ation of the generator that includes a cas-ing to restrict the range of bendermotion. In addition, the beam’s attach-ment point to the support is widened toreduce stresses.
In a second test, using the larger gen-erator integrated into a complete pack-age (Figures 1d and 1e), a Mica2Dot“mote” (www.xbow.com) transmittedtemperature readings, powered at abouta 1 percent duty cycle. The “on” powerof the larger node was 40 to 60 mW, andthe average power was 400 to 600 �W.This TempNode unit—run entirely fromscavenging—was part of a smart-build-ing project for regulating residentialtemperatures.
Modeling piezoelectric energyscavengers
As Figure 2 shows, we have primarilybased our piezoelectric generators on a
two-layer bender (or bimorph) mountedas a cantilever beam. The device’s topand bottom layers are composed ofpiezoelectric material. As the figureshows, bending the beam down pro-duces tension in the top layer and com-presses the bottom layer. A voltage devel-ops across each of the layers, which wecan condition and use to drive a load cir-cuit. If we wire the layers in series, theirindividual voltages add. If we wire themin parallel, their individual currents add.
All the generators in Figure 1 use thisbasic type of construction and operation.Also, although Figure 2 doesn’t show aneutral central layer (typically made ofmetal), most of our prototypes containsuch a layer. This central elastic layer addsrobustness, as the ceramic is very brittle; ifwe carefully choose the relative layer thick-ness, the central layer can also improveoverall electromechanical coupling.
Power outputWhen vibrations drive the device, the
generator provides an AC voltage. Whenwe connect a resistor across the piezo-electric electrodes, a simple resistance-capacitance (RC) circuit results. By com-bining the standard beam equations with
30 PERVASIVEcomputing www.computer.org/pervasive
ENERGY HARVESTING & CONSERVATION
Figure 1. Meso-scale piezoelectric generators. The 1 cm3 generator prototypes (a) and (b) powered a 1.9 GHz radio transmitter and resulted in an average power consumption of 120 �W. (c) A generator that restricts maximum deflection and stresses at the attachment point. A second test used a larger generator (d) integrated into a complete package (e) that measured and transmittedtemperature readings.
(a) (b) (c) (d) (e) Scavenging unit
Mote Capacitors
1
2
3
Voltage+–
Verticaldisplacement
Mass
StrainStrain
Figure 2. A two-layer bimorph mountedas a cantilever. The top and bottom layersare piezoelectric; bending the beam creates tension in the top layer and compresses the bottom layer.

JANUARY–MARCH 2005 PERVASIVEcomputing 31
the constitutive piezoelectric equationsand circuit equations, we can derive a rela-tionship for power output as a function ofinput vibration amplitude and frequency.2
Equation 1 shows this relationship:
(1)
where
• � is the frequency of driving vibra-tions.
• �n is the resonance frequency of thegenerator.
• cp is the elastic constant of the piezo-electric ceramic.
• k31 is the piezoelectric coupling co-efficient.
• tc is the thickness of one layer of thepiezoelectric ceramic.
• k2 is a geometric constant that relatesaverage piezoelectric material strainto the tip deflection.
• � is the dielectric constant of piezo-electric material.
• R is the load resistance.• V is the voltage across the load resis-
tance.• Cb is the capacitance of the piezoelec-
tric bimorph.
• � is the dimensionless damping ratio,which represents the viscous loss fromthe system.
The complicated second term representsthe square of voltage across the loadresistor as a function of input vibrationsand frequency. While the RC circuit isoversimplified, it does give a reasonablygood approximation of the amount ofpower generated.
If we assume that the device is operat-ing at resonance (that is, the driving fre-quency, �, matches the natural frequency�n), then we could rewrite Equation 1 as
,
(2)
where �n2 = km�1, substituting k, the
equivalent spring stiffness. This equationis similar to the one developed by ShadRoundy, Paul Wright, and Jan Kalaley,2
except that we’ve used mass and stiff-ness in place of natural frequency, andthe coupling coefficient k31 in place ofthe strain coefficient d31.
Implications It directly follows from Equation 1 that
power output is maximized when the
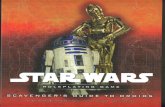
natural frequency �n is equal to the dri-ving frequency �. In fact, power outputdrops off dramatically as �n deviatesfrom �, as Figure 3a shows. Equation 2indicates that power is dependent on theproof mass m. As Figure 3b shows, thisrelationship is close to linear in the tar-get region. Because natural frequencydepends on the stiffness and mass (�n =(k/m)1/2), an increase in mass will neces-sitate an increase in stiffness to maintainthe natural frequency. We typicallyaccomplish this increase in stiffness bymaking the piezoelectric beam thicker orwider, thus increasing the amount ofpiezoelectric material. So, a mass increaseis typically accompanied by an increase inthe volume of piezoelectric material.
Figure 3c graphically indicates the rela-tionship between the power and couplingcoefficient. As the figure shows, withincreasing coupling, power increasesquickly up to a point, beyond which theincrease is quite modest. Nevertheless,because system-level coupling is usuallybelow the “knee” in Figure 3c (especiallyfor microfabricated devices), improvingthe material coupling coefficient is animportant research area. All of the para-meter values in Figures 3 are typical ofdevices that we’ve built and tested. Fur-thermore, vibrations of 2.5 m/s2 at 120Hz are typical of many low-level vibra-tions we’ve measured.2
Table 3 summarizes the design rela-
Pm
k
RCk t
k
cA
k
bc p
in
= ×
+
2
2 31
2
22
2314
2
2
4
ε
ζ( )(( )RC k k RC km mb b2
312 24 4+ +ζ ζ
PV
R R
k t
k
cA
RC
c pin
n
b
= = ×
−
2
31
2
22
2
21
2
2
1
ε
ωω
ωRRC
kRCb
n nn+
+ +( ) +2 12
2
2312ζω ω
ζω
bb
−
ω 22
Power vs. mass
(b)0
500
400
300
200
100
02 4 6
Mass (grams)8 10
Pow
er (µ
W)
(c)0
500
400
300
200
100
00.2 0.4
Coupling coefficient0.6
Pow
er (µ
W)
(a)0
102
100
10–2
10–4
100 200Frequency (Hz)
300 400
Pow
er (µ
W)
Figure 3. Simulations for a 1 cm3 piezoelectric scavenger driven by vibrations of 2.5 m/s2. (a) Power output versus drivingfrequency. The design’s resonance frequency is 120 Hz, and its proof mass is 9 grams. (b) Power output versus proof mass. All parameters are constant except piezoelectric-beam thickness; maximum deflection is approximately 90 �m. (c) Power output versus coupling coefficient. The proof mass is 9 grams, and the maximum deflection is approximately 90 �m.

tionships that our model highlights. Thedata in the table also serves as the basisfor our design improvements and re-search directions for piezoelectric energyscavengers. The design of optimal powerelectronics to efficiently convert powerfrom a high-impedance AC source (thepiezoelectric element) to a low-impedanceDC supply is also an active research area7
but is outside the scope of this article.
Improving energy harvesting We can increase the energy that can be
scavenged from vibration sources byeither passively or actively altering thebender configuration, or by modifyingthe bender geometry.
Several possible designs could obtainmore energy from a given source.
Self- and adaptive-tuning energysources
Vibration-based energy-scavengingdevices generate the maximum powerwhen their resonance frequency matchesthe driving frequency. Under many cir-cumstances, we know the driving fre-quency before we design and fabricatethe device and can thus build in theappropriate resonance characteristics. Inother situations, however, we eitherdon’t know this frequency a priori or itmight change over time. Given this, itwould clearly be advantageous to have asingle design that operates effectivelyover a range of vibration frequencies.Two possibilities exist here: we candevelop actuators to alter the scavenger’s
resonance frequency or develop designsfor scavengers with wider bandwidths.
Resonance-tuning actuators. We classifypotential resonance-tuning actuatorsinto two categories:
• Active tuning actuators run continu-ously to match the generator’s reso-nant frequency to the source’s drivingfrequency. Electronic springs are agood example here.
• Passive tuning actuators tune the gen-erator then turn off while maintain-ing the new resonance frequency. Anexample here is a moveable clampthat changes the length (and thus thestiffness) of a flexure mechanism.
An active tuning actuator provides aforce that is proportional to displacement(alters the effective stiffness), propor-tional to acceleration (alters the effectivemass), or proportional to velocity (altersthe effective damping). Roundy hasmathematically shown that, as long as asecond-order mechanical system modelsthe scavenger system reasonably well, anactive actuator will never improve poweroutput.8 In other words, the actuator willalways require more power than its oper-ation ultimately provides.
A passive tuning actuator must be ableto alter the resonance frequency and thencut power to the actuator while main-taining the new resonance frequency.One possible method to alter the stiff-ness of the beam structure is to apply
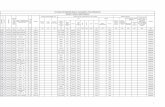
destabilizing axial loads.9 Figure 4a illus-trates this idea. We modeled the beam asa simply supported beam with a proofmass in the middle (in reality, therewould be another proof mass on the topof the beam, but we removed it here forthe sake of simplicity). The beam’sapparent stiffness is a function of theaxial compressive preload; it theoreti-cally reduces to zero as the axial preloadapproaches the critical buckling load.We could easily apply the preload by setscrews or other devices that push on theclamps at either end of the beam. Whilethis would require a significant amountof tuning-phase power, once the properpreload is applied, we can turn off allpower to the tuning operation.
Figure 4b shows how the resonance fre-quency of Figure 4a’s beam decreases asa function of preload. We can reduce theresonance frequency by approximately40 percent by using a preload equal tohalf of the critical buckling load. Fur-thermore, the actuator’s response is fairlylinear in the region up to half of the criti-cal buckling load.
Wide bandwidth designs. A secondapproach is to design a structure with awider inherent bandwidth. Again, usingthe model in Figure 3, we can prove thebandwidth to be approximately 2��n. Ifthe bimorph resonates at 120 Hz and thedamping ratio is 0.025 (which corre-sponds with our measurements), thebandwidth is 6 Hz, or +/� 3 Hz. Thisimplies that to get a high coupling
32 PERVASIVEcomputing www.computer.org/pervasive
ENERGY HARVESTING & CONSERVATION
TABLE 3Design relationships and potential improvements for piezoelectric vibration-based scavengers.
Design relationship from Equations 1 and 2 Current designs Design strategy/improvement
Power vs. resonance frequency Operation limited to a narrow Design for adaptive self-tuning of the resonancefrequency band frequency
Power vs. mass Power limited by proof mass at the Explore designs that improve the strain from aend of the cantilever given mass
Power vs. piezoelectric coupling System coupling coefficient is below Improve designs for better system coupling, andcoefficient “knee” in power vs. coupling curve improve thin-film piezoelectric-material properties
System integration (constraints Limited by hand assembly Possibly use MEMS (microelectromechanical systems)implied by equations) designs to integrate with sensors and a CMOS
(complementary metal-oxide semiconductor)

between the source and the piezoelectrictransducer, we must tune the scavengerto within +/� 3Hz. Practically, this canbe quite difficult because the scavengergeometry and material properties showenough variation to push the device offresonance. One way to design scavengerswith a wider bandwidth is to connect Nspring-mass-damper systems (Figure 5ashows a system with three masses andfour springs). This locates the i + 1th sys-tem’s resonance frequency one band-width away from that of the ith system.The various spring-mass subsystems’ res-onant frequencies thus almost overlapsuch that at least one element is in reso-nance over the desired frequency range.
Figure 5b shows the frequency responsefor Figure 5a’s mass position amplitudes,where k1 = 568 N/m, k3 and k2 = 776N/m, and k4 = 488 N/m. The masses arem1 = 2.8125 grams and m3 = 2.268grams, while m2 = 30 grams. We added a
damping constant of 0.025. As the figureshows, the overall bandwidth is 17.5 Hz,with two of the four springs contributingto the output at any given time.
Of the three possible approaches toincreasing the generator’s operation fre-quency, the most feasible seem to be mul-timass, multimode resonators, which can
JANUARY–MARCH 2005 PERVASIVEcomputing 33
0
1.0
0.8
0.6
0.4
0.2
00.2 0.4
Ratio of axial preload tocritical buckling load (P/Pcr)
1.00.80.6
Piezoelectric material
Axial preload
Proof massCenter shim
(b)(a)
Axialpreload
Shift
in fr
eque
ncy
(�/�
m)
Figure 4. Applying axial loads to alter beam stiffness. (a) Schematic of a simply supported piezoelectric beam scavenger with anaxial preload (with the top half of proof mass removed for simplicity’s sake). (b) Ratio of tuned resonance frequency to original resonance frequency as a function of the axial preload.
(b)
(a)
–95
–100
–105
–110
–115
–120
–125
–130
–135
–140
Frequency (rad./sec.)102.9
Mag
nitu
de (d
B)
102.8
3m
2y
2 3
1
3
2
1y
1yy �yy �yy
1m
3y
2m
3k 4k1k 2k
Figure 5. Multi-degree-of-freedombimorph designed for higher bandwidth.(a) A system comprising a piezoelectricbeam with three masses (m1 ... m3) andfour springs (k1 ... k4); (y1 ... y3) representsthe downward deflection of masses. (b) The frequency response for the position amplitudes of the masses.

34 PERVASIVEcomputing www.computer.org/pervasive
ENERGY HARVESTING & CONSERVATION
easily triple the generator’s bandwidth,and passive tuning actuators, which canreduce frequency by 50 percent. Also,because a passive tuning actuator requiresno power once the frequency is tuned,over time the total energy output willincrease.
Alternative mechanical structuresMost researchers have focused on tra-
ditional or slightly varied cantileverbeams. A cantilever beam has severaladvantages: it produces relatively lowresonance frequencies and relatively highaverage strain for a given force input. Itis also easily realizable in a microfabri-cation process. However, a broader con-sideration of potential design geometriescan increase scavenger performance.
A design geometry should try toaddress at least one (if not all) of the fol-lowing goals:
• Maximize the piezoelectric response fora given input. This can be accomplishedeither by maximizing the material’saverage strain for a given input or bychanging the design to use direct cou-pling rather than the transverse cou-pling that piezoelectric bimorphs use.
• Improve scavenger robustness byreducing stress concentration.
• Minimize the losses (damping) asso-ciated with the mechanical structure.
• Improve the scavenger’s manufac-turability.
There are a few potential designs that
address one or more of these goals.Improving the geometry of the scav-enger’s piezoelectric bimorph is itself amajor improvement area. Bulk materialproperties impose a strain limit of 500microstrain on the bimorph to avoidbrittle fracture. To prevent overstrainand maximize energy, we must designgeometries that produce uniform andlarge strain below the 500 microstrainlimit. With the same volume of lead zir-conium titanate (PZT, the most commontype of piezoelectric material) and anincreasingly triangular trapezoidal pro-file (rather than a rectangular cantilever),we can distribute the strain more evenly,such that maximum strain is reached atevery point in the bimorph. A trape-zoidal geometry can supply more thantwice the energy (per unit volume PZT)than the rectangular geometry, reducingboth the bimorph’s size and cost. Figure6 shows the bending energy value rela-tive to a cantilever of uniform width forthree alternative beam geometries.
In addition to modifying the cantileverbeam’s profile, we are exploring
• A simply supported beam. This designexploits the trapezoidal shape, whileletting us apply an axial load at theclamped ends (which provides for fre-quency tuning).
• A curved compressor. In this design, weutilize curvature in the generator toensure that the acting force inducescompressive rather than tensile stress inthe piezoelectric material. This extends
fatigue life—the number of bendingcycles the structure can withstandbefore failing—while maintaining thesame power output level as an equiv-alent tensile stress. Again, we canapply a lateral force to tune the nat-ural frequency of the generator to itsenvironment.
• A compliant mechanism and stack.This design translates relatively low-force, high-displacement proof massoscillations into smaller-displacement,higher-force motion around a PZTstack. This capitalizes on the direct-coupling mode’s higher efficiencywithout the usual high actuation forcerequirement.
Developing alternate structures cansignificantly increase a device’s longevity.This, in turn, lets the device operate atlarger vibration amplitudes and thus gen-erate more energy from the environment.
Vibration-based energy scav-enging is a viable means ofobtaining the small quantitiesof energy necessary to power
wireless sensor nodes. Current technol-ogy, however, focuses mostly on rectan-gular cantilever bulk PZT structures.Such structures have low bandwidth,inefficiently utilize PZT material, andcan’t be integrated with standard fabri-cation methods. To overcome some ofthese problems, we’re pursuing threeapproaches to improving vibration-based energy scavengers:
• Frequency tuning. Current designsmust resonate at the driving frequencyto generate significant power. We arepursuing designs incorporating tuningactuators that will tune the generator’snatural frequency to match the driving
(c)Length
Stra
in
(b)Length
Stra
in
(a)Length
Stra
in
Figure 6. Relative bending energies andstrain profiles for alternative beamgeometries. (a) U = 1; (b) U = 1.54; and(c) U = 2.17. The red circles indicate thepoint at which load is applied.

JANUARY–MARCH 2005 PERVASIVEcomputing 35
frequency. Additionally, designs incor-porating multiple proof masses canmoderately increase scavenger band-width from around 6 Hz to perhaps24 Hz.
• Alternative design geometries. We’veconsidered several potential alterna-tive design geometries. These designsfocus on improving design robustnessor a given input’s power output.
• Developing processes to allow MEMS(microelectromechanical systems) im-plementation and integration withsensors and electronics. We haverecently created prototypes of thin-film PZT structures. Initial calcula-tions show that such structures cangenerate an areal power density of 5�W/cm2 and a volume power densityof 80 �W/cm3. Recently, we patterned
and dry-etched beams using standardmicrofabrication processes. We arecurrently attempting selective wet-etching processes to release the can-tilever beams from the Si wafer.
In addition, at least two other out-standing research areas exist forimproving vibration-based energy scav-enging: optimizing the power circuitry
Shad Roundy is chief architect for energy scavenging atLV Sensors. His research interests include energy scaveng-ing, MEMS, and smart material actuators. He receivedhis PhD in mechanical engineering from UC Berkeley,where he was the recipient of the Intel Noyce Fellowshipand Department of Energy Integrated Manufacturing Fel-lowship. Also, MIT’s Technology Review recently namedhim one of the world’s 100 top young innovators. Contact
him at LV Sensors, 1480 6th St., Suite 175, Emeryville, CA 94608; [email protected].
Eli S. Leland is a PhD student in mechanical engineeringat UC Berkeley. His research interests include vibrationenergy scavenging and energy policy. He received a BS inmechanical engineering from Princeton University. He is aNational Defense Science and Engineering Graduate fel-low and a member of Sigma Xi, the Scientific ResearchSociety. Contact him at 2111 Etcheverry Hall, UC Berke-ley, Berkeley, CA 94720; [email protected].
Jessy Baker is a second-year graduate student andNational Science Foundation fellow at UC Berkeley. Herresearch interests are in alternative energy and sustain-able technologies. She received her BS in mechanicalengineering from MIT. Contact her at 2111 EtcheverryHall, UC Berkeley, Berkeley, CA 94720; [email protected].
Eric Carleton is a PhD candidate in materials science atUC Berkeley. His research interests include ferroelectricmaterials, thin-film science, MEMS, and energy scaveng-ing. He received his MS in ceramic engineering from theUniversity of Missouri-Rolla. Contact him at 210 HMMB#1760, UC Berkeley, Berkeley, CA 94720-1760; [email protected].
Elizabeth Reilly is a PhD student in mechanical engi-neering at UC Berkeley, where her research focuses onpiezoelectric thin-film vibrational energy scavenging.She received her MS in mechanical engineering from UCBerkeley. Contact her at 2111 Etcheverry Hall, UC Berke-ley, Berkeley, CA 94720; [email protected].
the AUTHORS
Elaine Lai is a graduate student in the Berkeley Manu-facturing Institute at UC Berkeley. Her research interestsinclude vibration-based energy scavenging and MEMSstructures. She received her BS in mechanical engineer-ing from MIT. Contact her at 1930 Hearst Ave., Apt. E,Berkeley, CA 94709; [email protected].
Brian Otis is a graduate student in the Department ofElectrical Engineering and Computer Science at UC Berke-ley. His research interests include analog IC design, bio-electronics, RF circuit design, and IC-MEMS interfaces.He received his MS in electrical engineering and computersciences at UC Berkeley. Contact him at 511 Cory Hall,UC Berkeley, Berkeley, CA 94720; [email protected].
Jan M. Rabaey is the Donald O. Pederson DistinguishedProfessor in the Department of Electrical Engineeringand Computer Sciences at UC Berkeley. He’s also the sci-entific codirector of the Berkeley Wireless Research Cen-ter and the director of the Gigascale Systems ResearchCenter. His research interests include the conception andimplementation of next-generation integrated wirelesssystems, including the analysis and optimization of com-
munication algorithms and networking protocols, the study of low-energyimplementation architectures and circuits, and the supporting designautomation environments. He received his EE and PhD degrees in appliedsciences from Katholieke Universiteit Leuven. Contact him at 511 Cory Hall,UC Berkeley, Berkeley, CA 94720; [email protected].
V. Sundararajan is a faculty member in the Departmentof Mechanical Engineering at the University of California,Riverside. His research interests include sensor networks,environmental monitoring, energy harvesting, computa-tional geometry, collaborative processing, and manufac-turing systems. He received his MS and PhD in mechani-cal engineering from UC Berkeley. Contact him at A317Bourns Hall, Univ. of California, Riverside, Riverside, CA
92521; [email protected].
Paul K. Wright is associate dean of the College of Engi-neering, cochair of the Management of Technology Pro-gram, and codirector of the Berkeley ManufacturingInstitute at UC Berkeley. He is also working with variousUC Berkeley colleagues to design and prototype “bat-teryless” wireless systems for demand-response powermanagement throughout California. He received hisPhD in industrial metallurgy from the University of Birm-
ingham, England. Contact him at 2117 Etcheverry Hall, UC Berkeley, Berke-ley, CA 94720; [email protected].

and improving microscale generators’PZT microfabrication and integrationcapabilities.
REFERENCES1. B. Otis and J. Rabaey, “A 300�W 1.9GHz
Oscillator Utilizing Micro-Machined Res-onators,” IEEE J. Solid State Circuits, vol.38, no. 7, July 2003, pp. 1271–1274.
2. S. Roundy, P.K. Wright, and J. Rabaey,Energy Scavenging for Wireless Sensor Net-works with Special Focus on Vibrations,Kluwer Academic Press, 2003.
3. M. El-hami et al., “Design and Fabricationof a New Vibration-Based Electromechan-ical Power Generator,” Sensors and Actua-
tors A: Physical, vol. 92, nos. 1–3, 2001,pp. 335–342.
4. M. Miyazaki et al., “Electric-Energy Gen-eration Using Variable-Capacitive Resonatorfor Power-Free LSI,” Proc. Int’l Symp. LowPower Electronics and Design (ISLPED),ACM Press, 2003, pp. 193–198.
5. W.H. Ko, Piezoelectric Energy Converter forElectronic Implants, US Patent 3,456,134,US Patent and Trademark Office, 2004.
6. P. Glynne-Jones et al., “Towards a Piezo-electric Vibration Powered Microgenera-tor,” IEE Science, Measurement, and Tech.,vol. 148, no. 2, Mar. 2001, pp. 68–72.
7. G.K. Ottman, H.F. Hofmann, and G.A.Lesieutre, “Optimized Piezoelectric EnergyHarvesting Circuit Using Step-Down Con-verter in Discontinuous Conduction
Mode,” IEEE Trans. Power Electrics, vol.18, no. 2, 2003, pp. 696–703.
8. S. Roundy, “Toward Self-Tuning AdaptiveVibration Based Micro-Generators,” Proc.SPIE Int’l Symp. Smart Materials, Nano-and Micro-Smart Systems, SPIE Press,2004, pp. 373–384.
9. G.A. Lesieutre and C.L. Davis, “Can a Cou-pling Coefficient of a Piezoelectric DeviceBe Higher Than Those of Its Active Mate-rial?” J. Intelligent Material Systems andStructures, vol. 8, no. 10, Oct. 1997, pp.859–867.
For more information on this or any other comput-ing topic, please visit our Digital Library at www.computer.org/publications/dlib.
ENERGY HARVESTING & CONSERVATION
EXECUTIVE COMMITTEEPresident:GERALD L. ENGEL* Computer Science & EngineeringUniv. of Connecticut, Stamford1 University PlaceStamford, CT 06901-2315Phone: +1 203 251 8431Fax: +1 203 251 [email protected]: DEBORAH M. COOPER*Past President: CARL K. CHANG*VP, Educational Activities: MURALI VARANASI†VP, Electronic Products and Services: JAMES W. MOORE (2ND VP)*VP, Conferences and Tutorials: YERVANT ZORIAN†VP, Chapters Activities: CHRISTINA M. SCHOBER*VP, Publications: MICHAEL R.WILLIAMS (1ST VP)*VP, Standards Activities: SUSAN K. (KATHY) LAND*VP, Technical Activities: STEPHANIE M. WHITE†Secretary: STEPHEN B. SEIDMAN*Treasurer: RANGACHAR KASTURI†2004–2005 IEEE Division V Director: GENE F. HOFFNAGLE†2005–2006 IEEE Division VIII Director: STEPHEN L. DIAMOND†2005 IEEE Division V Director-Elect: OSCAR N. GARCIA*Computer Editor in Chief: DORIS L. CARVER†Executive Director: DAVID W. HENNAGE†* voting member of the Board of Governors† nonvoting member of the Board of Governors
E X E C U T I V E S T A F FExecutive Director: DAVID W.HENNAGEAssoc. Executive Director: ANNE MARIE KELLYPublisher: ANGELA BURGESSAssistant Publisher: DICK PRICEDirector, Administration: VIOLET S. DOANDirector, Information Technology & Services: ROBERT CAREDirector, Business & Product Development: PETER TURNER
PURPOSE The IEEE Computer Society is theworld’s largest association of computing profes-sionals, and is the leading provider of technicalinformation in the field.
MEMBERSHIP Members receive the month-ly magazine Computer, discounts, and opportu-nities to serve (all activities are led by volunteer members). Membership is open to all IEEEmembers, affiliate society members, and othersinterested in the computer field.
COMPUTER SOCIETY WEB SITEThe IEEE Computer Society’s Web site, at www.computer.org, offers information andsamples from the society’s publications and con-ferences, as well as a broad range of informationabout technical committees, standards, studentactivities, and more.
BOARD OF GOVERNORSTerm Expiring 2005: Oscar N. Garcia, Mark A. Grant, Michel Israel, Rohit Kapur, Stephen B. Seidman, Kathleen M. Swigger, MakotoTakizawaTerm Expiring 2006: Mark Christensen, Alan Clements, Annie Combelles, Ann Q. Gates, James D. Isaak, Susan A. Mengel, Bill N. SchilitTerm Expiring 2007: Jean M. Bacon, George V.Cybenko, Richard A. Kemmerer, Susan K. (Kathy)Land, Itaru Mimura, Brian M. O’Connell, ChristinaM. SchoberNext Board Meeting: 11 Mar. 2005, Portland, OR
IEEE OFFICERSPresident: W. CLEON ANDERSONPresident-Elect: MICHAEL R. LIGHTNERPast President: ARTHUR W. WINSTONExecutive Director: TBDSecretary: MOHAMED EL-HAWARYTreasurer: JOSEPH V. LILLIEVP, Educational Activities: MOSHE KAMVP, Pub. Services & Products: LEAH H. JAMIESONVP, Regional Activities: MARC T. APTERVP, Standards Association: JAMES T. CARLOVP, Technical Activities: RALPH W. WYNDRUM JR.IEEE Division V Director: GENE F. HOFFNAGLEIEEE Division VIII Director: STEPHEN L. DIAMONDPresident, IEEE-USA: GERARD A. ALPHONSE
COMPUTER SOCIETY OFFICESHeadquarters Office
1730 Massachusetts Ave. NW
Washington, DC 20036-1992
Phone: +1 202 371 0101
Fax: +1 202 728 9614
E-mail: [email protected]
Publications Office10662 Los Vaqueros Cir., PO Box 3014Los Alamitos, CA 90720-1314Phone:+1 714 8218380E-mail: [email protected] and Publication Orders:Phone: +1 800 272 6657 Fax: +1 714 821 4641E-mail: [email protected]
Asia/Pacific OfficeWatanabe Building1-4-2 Minami-Aoyama,Minato-kuTokyo107-0062, JapanPhone: +81 3 3408 3118 Fax: +81 3 3408 3553E-mail: [email protected]