IMPROVING ACTIVE LEARNING METHODS USING SPATIAL INFORMATION IGARSS 2011 Edoardo Pasolli Univ. of...
20
IMPROVING ACTIVE LEARNING METHODS USING SPATIAL INFORMATION IGARSS 2011 Edoardo Pasolli Univ. of Trento, Italy [email protected]. it Farid Melgani Univ. of Trento, Italy July 28, 2011 Devis Tuia Univ. of València, Spain Fabio Pacifici DigitalGlobe, Colorado William J. Emery Univ. of Colorado at Boulder
-
Upload
hilary-kelly -
Category
Documents
-
view
217 -
download
3
Transcript of IMPROVING ACTIVE LEARNING METHODS USING SPATIAL INFORMATION IGARSS 2011 Edoardo Pasolli Univ. of...

IMPROVING ACTIVE LEARNING METHODSUSING SPATIAL INFORMATION
IGARSS 2011
Edoardo PasolliUniv. of Trento, [email protected]
Farid MelganiUniv. of Trento, Italy
July 28, 2011
Devis TuiaUniv. of València,
Spain
Fabio PacificiDigitalGlobe, Colorado
William J. EmeryUniv. of Colorado at
Boulder

Introduction
Supervised classification approach
2
Pre-processing
Feature extraction
Classification
Image/Signal Decision
Training sample
collection
Training sample quality/quantity
Human expert
Impact on accuracies
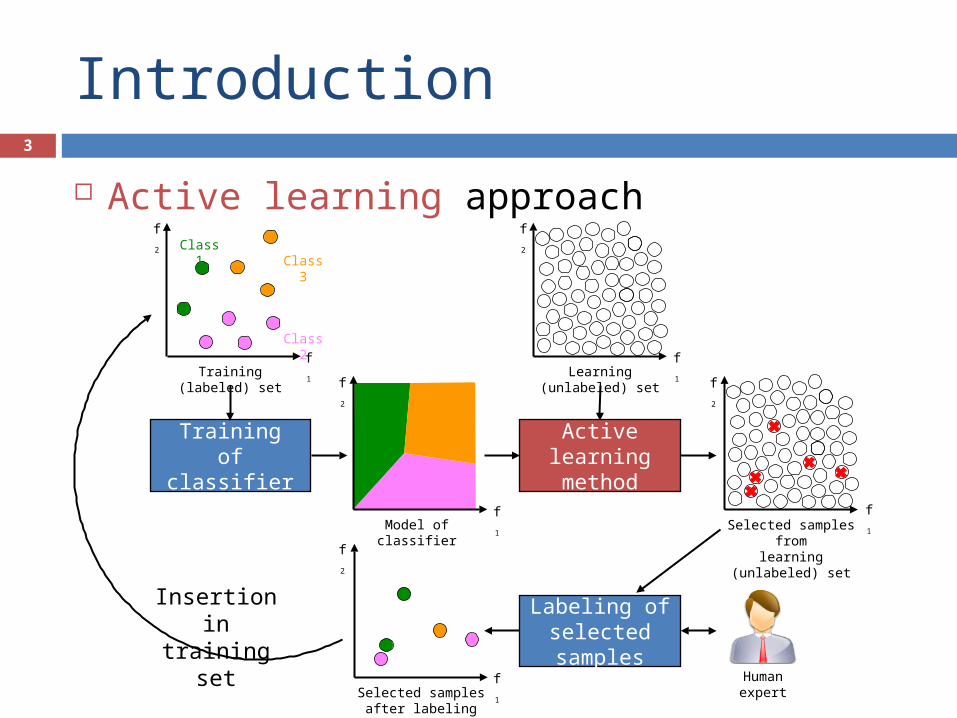
Introduction
Active learning approach
3
Trainingof classifier
Active learningmethod
Model of classifier
Learning (unlabeled) set
Labeling of selected samples
Selected samplesafter labeling
Insertion in training set
f1
f2
f1
f2
f1
f2
Selected samples from
learning (unlabeled) set
f2
f1
f2
f1
Human expert
Training (labeled) set
Class 1 Class
3
Class 2

Objective
Propose SVM-based active learning strategy for classification of remote sensing images by combining spectral and spatial information
4

Support Vector Machines (SVMs) Training set: Kernel function:
Dual optimization problem
maximize
subject to
5
n
jijijiji
n
ii Kyy
1,1
),(2
1xx
niC
y
i
n
iii
,...,1 ,0
01
niii y 1, x
'K xx,

Support Vector Machines (SVMs) Discriminant function
6
SVMTraining
f1
f2
Training (labeled) set
in feature space
Class 1
Class 2 f1
f2
Training (labeled) set
in feature space
SVM model
0 absolute value ofdiscriminant function
: SV
n
i
*iii bKyf
1
* ),()( xxx

Proposed Strategy7
L: Training setSVs: Support vectors
SVMTraining
Spectral selectioncriterion
Spatial selectioncriterion
U’s: Selected
samplesSelection
Insertion intraining set
Us: Sorted samples
U: Learning set
Human expert
Nondominated
sorting
Labeling
L’s: Labeled samples
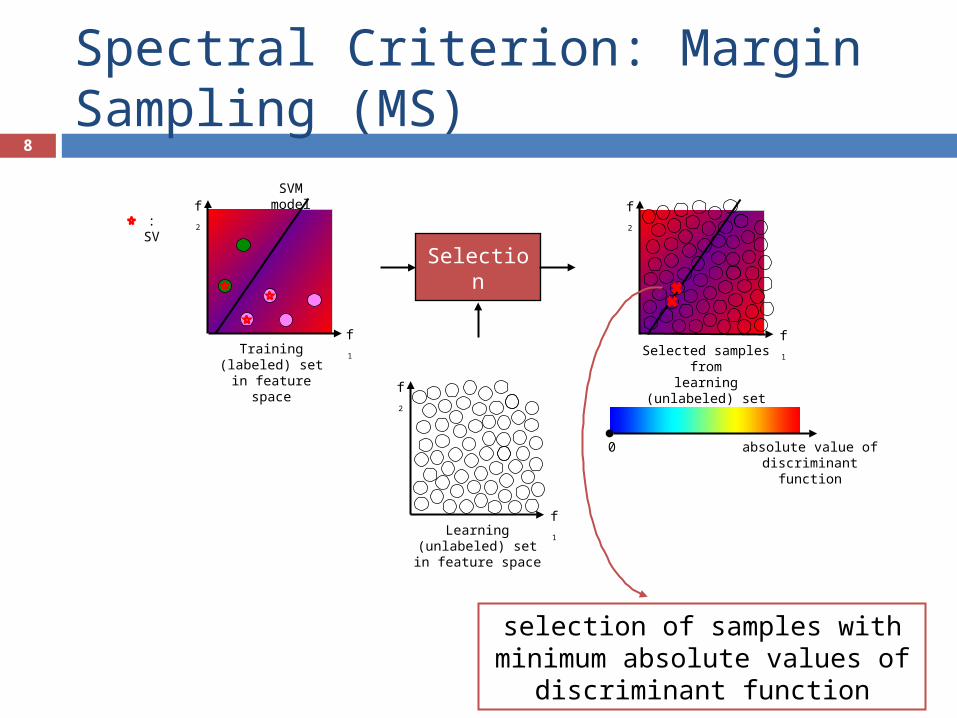
Spectral Criterion: Margin Sampling (MS)
8
Selection
Learning (unlabeled) setin feature space
f1
f2
f1Training (labeled)
setin feature space
f2
SVM model
f1
f2
Selected samples from
learning (unlabeled) set
in feature space
selection of samples with minimum absolute values of
discriminant function
0 absolute value ofdiscriminant function
: SV
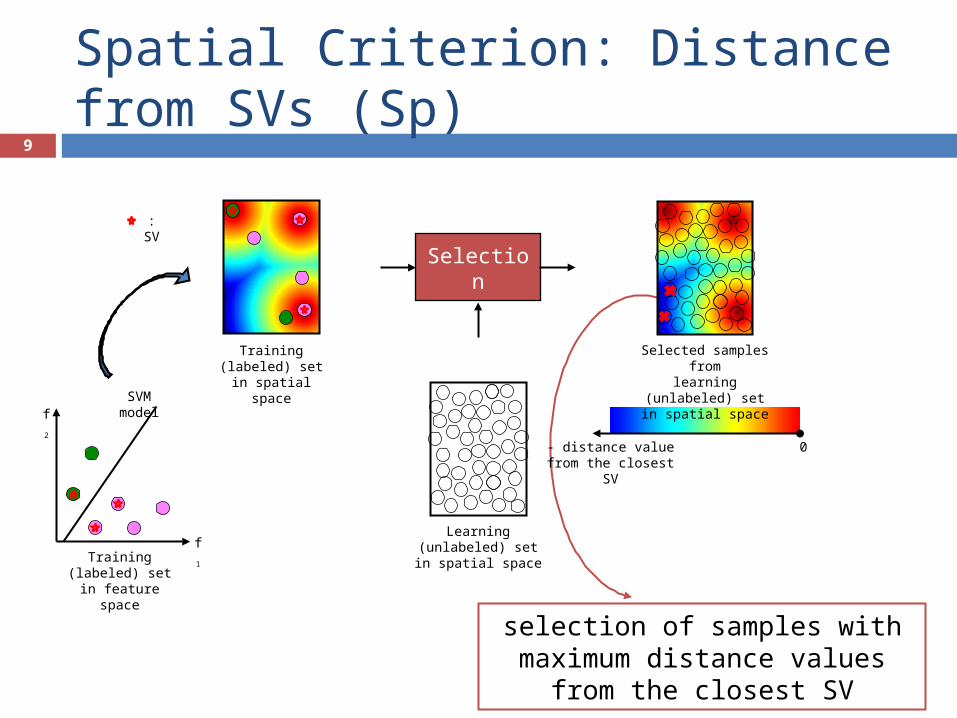
Spatial Criterion: Distance from SVs (Sp)
9
Selection
selection of samples with maximum distance values from
the closest SV
: SV
0- distance valuefrom the closest SV
f1Training (labeled)
setin feature space
f2
SVM model
Learning (unlabeled) set in
spatial space
Selected samples from
learning (unlabeled) set in spatial space
Training (labeled) set
in spatial space

Combined Criterion (MS&Sp)10
determined by nondominated
sorting
selection of samplesstarting from the Pareto Front
1 front number
Front 1: Pareto Front
Front 2
Front 3
Front 4
Front 5
MS: absolute value of
discriminant function
Sp: - distance value from the
closest SV
Experimental Results
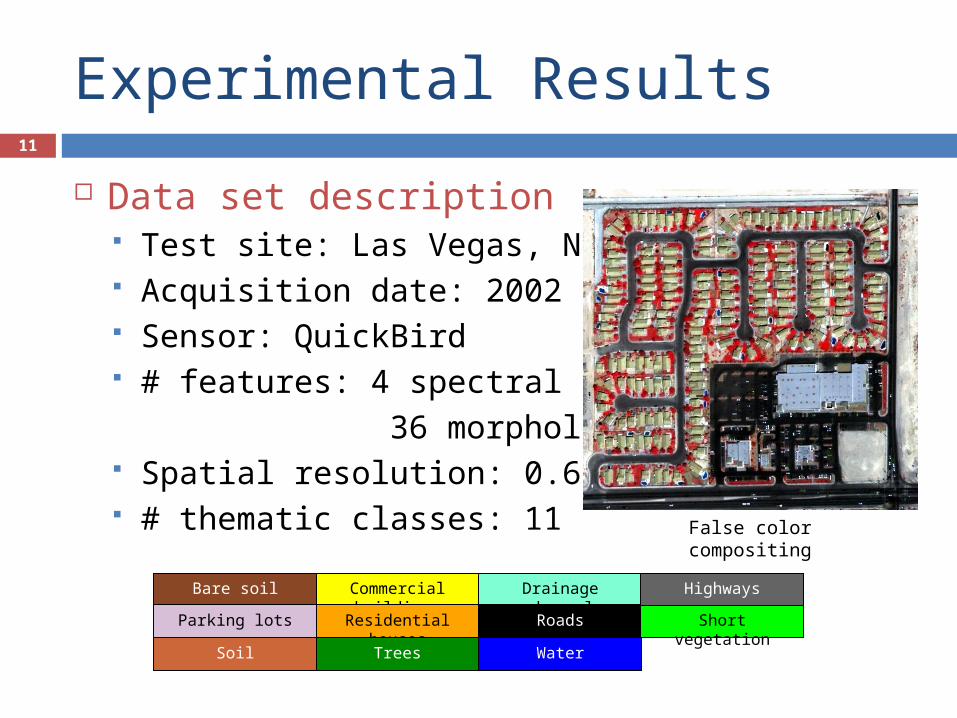
Data set description Test site: Las Vegas, Nevada Acquisition date: 2002 Sensor: QuickBird # features: 4 spectral +
36 morphological Spatial resolution: 0.6 m # thematic classes: 11
11
False color compositing
Commercial buildings
Residential houses
Drainage channel
Roads
Trees
Short vegetation
Water
Bare soil
Parking lots
Soil
Highways

Experimental Results
Data set description Test site: Las Vegas, Nevada Acquisition date: 2002 Sensor: QuickBird # features: 4 spectral +
36 morphological Spatial resolution: 0.6 m # thematic classes: 11
12
Ground truth
Commercial buildings
Residential houses
Drainage channel
Roads
Trees
Short vegetation
Water
Bare soil
Parking lots
Soil
Highways
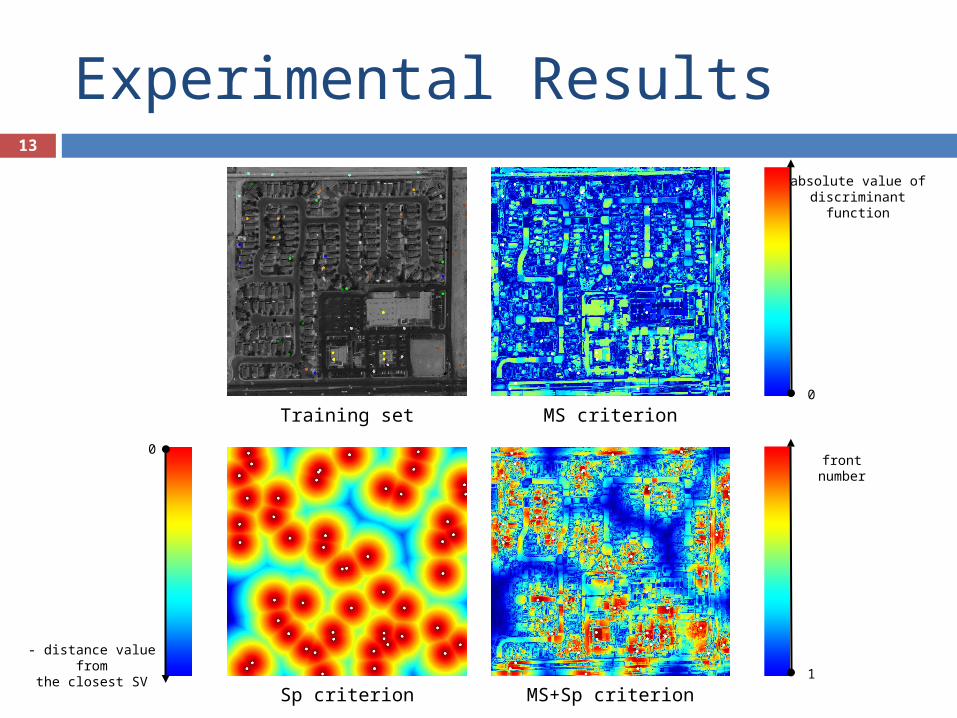
Experimental Results13
Training set MS criterion
Sp criterion MS+Sp criterion
0
absolute value ofdiscriminant function
0
- distance value fromthe closest SV
1
front number

Experimental Results
Overall Accuracy and Kappa index
14

Experimental Results
Absolute value of discriminant functionnormalization of map standard
deviation
15

Experimental Results
Detailed results
16
Accuracies on 343,023 test samples
Method#
trainingsamples
OA σOAKapp
aσKappa AA σAA σDF
Full 30000 95.47 - 0.947 - 93.35 - 0.06Initial 55 58.98 5.74 0.533 0.06 59.33 4.10 0.45
RMS
MS&Sp1035
84.8988.0989.73
0.560.400.24
0.8230.8600.880
0.0070.0050.003
79.2283.1584.86
1.470.800.38
0.250.250.16
RMS
MS&Sp2035
87.1890.5492.13
0.420.890.19
0.8500.8890.908
0.0050.010.01
82.0086.5588.39
1.001.070.27
0.220.180.16

Experimental Results
Detailed results
17
Accuracies on 343,023 test samples
Method#
trainingsamples
OA σOAKapp
aσKappa AA σAA σDF
Full 30000 95.47 - 0.947 - 93.35 - 0.06Initial 55 58.98 5.74 0.533 0.06 59.33 4.10 0.45
RMS
MS&Sp1035
84.8988.0989.73
0.560.400.24
0.8230.8600.880
0.0070.0050.003
79.2283.1584.86
1.470.800.38
0.250.250.16
RMS
MS&Sp2035
87.1890.5492.13
0.420.890.19
0.8500.8890.908
0.0050.010.01
82.0086.5588.39
1.001.070.27
0.220.180.16

Experimental Results
Detailed results
18
Accuracies on 343,023 test samples
Method#
trainingsamples
OA σOAKapp
aσKappa AA σAA σDF
Full 30000 95.47 - 0.947 - 93.35 - 0.06Initial 55 58.98 5.74 0.533 0.06 59.33 4.10 0.45
RMS
MS&Sp1035
84.8988.0989.73
0.560.400.24
0.8230.8600.880
0.0070.0050.003
79.2283.1584.86
1.470.800.38
0.250.250.16
RMS
MS&Sp2035
87.1890.5492.13
0.420.890.19
0.8500.8890.908
0.0050.010.01
82.0086.5588.39
1.001.070.27
0.220.180.16

Conclusions
In this work, new SVM-based active learning strategy by combining spectral and spatial information is proposed
Encouraging performances in terms of classification accuracy: convergence speed and
stability classification reliability
Drawbacks higher computational load
19
IMPROVING ACTIVE LEARNING METHODSUSING SPATIAL INFORMATION
IGARSS 2011
Edoardo PasolliUniv. of Trento, [email protected]
Farid MelganiUniv. of Trento, Italy
July 28, 2011
Devis TuiaUniv. of València,
Spain
Fabio PacificiDigitalGlobe, Colorado
William J. EmeryUniv. of Colorado at
Boulder