Identificación algebraica en línea de grietas en un...
10
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Tema A1a Diseño Mecánico: Rotodinámica. Identificación algebraica en línea de grietas en un sistema rotodinámico. Olivia Hernández Mendoza a* , José Gabriel Mendoza Larios a , Jorge Colín Ocampo a , José Navarro Torres b , Alberto Delgado Hernández b , Andrés Blanco Ortega a , Carlos Francisco Guzmán Correa a a Departamento de Ingenieria Mecánica, Centro Nacional de Investigación y Desarrollo Tecnologico, Interior Internado Palmira S/N, Col. Palmira, Cuernavaca Morelos, Mexico. Telefono: 01(777) 362-7770 ext. 111, [email protected] b Escuela de Ciencias de la Ingeniería y Tecnología / Universidad Autónoma de Baja California. Blvd. Universitario #1000. Unidad Valle de las Palmas. Tijuana, Baja California. [email protected]*, [email protected], [email protected], [email protected], [email protected], [email protected], [email protected]. R E S U M E N En este trabajo se presenta el desarrollo matemático de dos modelos de identificación en línea de grietas en un sistema rotor-chumacera, basado en la técnica de identificación algebraica, los cuales toman como datos de entrada la respuesta de vibración del sistema a velocidad constante y velocidad variable. Los identificadores se desarrollaron a partir del modelo matemático de un rotor-chumacera tipo Jeffcott, donde se incluye el efecto correspondiente al fenómeno de respiro de la fisura mediante la modificación de los parámetros de rigidez del sistema. Se analizó de forma numérica el comportamiento en el tiempo del identificador de grietas propuesto, para la identificación de la presencia de grietas en el rotor se tomó como dato de entrada la respuesta de vibración obtenida del modelo matemático a velocidad constante y velocidad variable, para su solución se consideró el método numérico de Newmark y rampas de excitación de tipo lineal. De los resultados obtenidos se demostró que los identificadores detectan la presencia de la grieta en el rotor en tiempos menores de un segundo de manera precisa. Palabras Clave: Identificación algebraica, respiro de fisura, vibraciones mecánicas. A B S T R A C T In this paper we present the mathematical development of two models of on-line identification of cracks in a rotor-bearing system, based on the algebraic identification technique, which take as input data the vibration response of the system at constant-speed and variable-speed. The identifiers were developed from the mathematical model of a Jeffcott-like rotor- bearing, which includes the effect corresponding to the phenomenon of breathing crack by modifying the stiffness parameters of the system. The behavior in time of the proposed crack identifier was analyzed numerically to identify the presence of cracks in the rotor. The vibration response obtained from the mathematical model at constant-speed and variable-speed was taken as input data for its solution was considered the numerical method of Newmark and excitation ramps of linear type. From the obtained results it was demonstrated that the identifiers detect the presence of the crack in the rotor in times less than a second of precisely. Keywords: Algebraic identification, Breathing crack, mechanical vibrations. b Nomenclatura: c Coeficiente de amortiguamiento. e Excentricidad de la masa de desbalance. f(t) Función escalón a causa del respiro de la fisura. Fx Fy Fuerza de excitación de desbalance. g Gravedad. k0 Rigidez del eje sin fisura. Kp Profundidad de la fisura. Kpx Profundidad de la fisura respecto al eje x. Kpy Profundidad de la fisura respecto al eje y. l Longitud del eje. m Masa del disco. t Tiempo. West Deflexión estática. , , xxx Aceleración, velocidad y desplazamiento horizontal. ̈ , ̇ , , Aceleración, velocidad y desplazamiento verticales del disco de la masa m. ̈ , ̇ , , Aceleración, velocidad y desplazamiento horizontales del disco de la masa m. , , yyy Aceleración, velocidad y desplazamiento vertical. α Aceleración angular. β Posición angular de la masa de desbalance. Δ Pérdida de rigidez debido a la apertura de la fisura. ∊ Incremento en el tiempo. Velocidad de rotación del rotor. 1. Introducción. Cuando se pone en marcha una máquina rotatoria, aun estando en sus parámetros de funcionamiento convencionales, se genera en ella vibraciones y ruido a raíz de diversas causas como son cargas no uniformes a lo largo del eje, lubricación inadecuada, etc. [1]. Todos estos ISSN 2448-5551 DM 7 Derechos Reservados © 2017, SOMIM
Transcript of Identificación algebraica en línea de grietas en un...

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Tema A1a Diseño Mecánico: Rotodinámica.
Identificación algebraica en línea de grietas en un sistema rotodinámico.
Olivia Hernández Mendozaa*, José Gabriel Mendoza Lariosa , Jorge Colín Ocampoa, José Navarro
Torresb, Alberto Delgado Hernándezb , Andrés Blanco Ortegaa, Carlos Francisco Guzmán Correaa
aDepartamento de Ingenieria Mecánica, Centro Nacional de Investigación y Desarrollo Tecnologico, Interior Internado Palmira S/N, Col. Palmira,
Cuernavaca Morelos, Mexico. Telefono: 01(777) 362-7770 ext. 111, [email protected]
b Escuela de Ciencias de la Ingeniería y Tecnología / Universidad Autónoma de Baja California. Blvd. Universitario #1000. Unidad Valle de las Palmas.
Tijuana, Baja California.
[email protected]*, [email protected], [email protected], [email protected], [email protected],
[email protected], [email protected].
R E S U M E N
En este trabajo se presenta el desarrollo matemático de dos modelos de identificación en línea de grietas en un sistema
rotor-chumacera, basado en la técnica de identificación algebraica, los cuales toman como datos de entrada la respuesta
de vibración del sistema a velocidad constante y velocidad variable. Los identificadores se desarrollaron a partir del
modelo matemático de un rotor-chumacera tipo Jeffcott, donde se incluye el efecto correspondiente al fenómeno de respiro
de la fisura mediante la modificación de los parámetros de rigidez del sistema. Se analizó de forma numérica el
comportamiento en el tiempo del identificador de grietas propuesto, para la identificación de la presencia de grietas en
el rotor se tomó como dato de entrada la respuesta de vibración obtenida del modelo matemático a velocidad constante y
velocidad variable, para su solución se consideró el método numérico de Newmark y rampas de excitación de tipo lineal.
De los resultados obtenidos se demostró que los identificadores detectan la presencia de la grieta en el rotor en tiempos
menores de un segundo de manera precisa.
Palabras Clave: Identificación algebraica, respiro de fisura, vibraciones mecánicas.
A B S T R A C T
In this paper we present the mathematical development of two models of on-line identification of cracks in a rotor-bearing
system, based on the algebraic identification technique, which take as input data the vibration response of the system at
constant-speed and variable-speed. The identifiers were developed from the mathematical model of a Jeffcott-like rotor-
bearing, which includes the effect corresponding to the phenomenon of breathing crack by modifying the stiffness
parameters of the system. The behavior in time of the proposed crack identifier was analyzed numerically to identify the
presence of cracks in the rotor. The vibration response obtained from the mathematical model at constant-speed and
variable-speed was taken as input data for its solution was considered the numerical method of Newmark and excitation
ramps of linear type. From the obtained results it was demonstrated that the identifiers detect the presence of the crack in
the rotor in times less than a second of precisely. Keywords: Algebraic identification, Breathing crack, mechanical vibrations. b
Nomenclatura: c Coeficiente de amortiguamiento.
e Excentricidad de la masa de desbalance.
f(t) Función escalón a causa del respiro de la fisura.
Fx Fy Fuerza de excitación de desbalance.
g Gravedad.
k0 Rigidez del eje sin fisura.
Kp Profundidad de la fisura.
Kpx Profundidad de la fisura respecto al eje x.
Kpy Profundidad de la fisura respecto al eje y.
l Longitud del eje.
m Masa del disco.
t Tiempo.
West Deflexión estática.
, ,x x x Aceleración, velocidad y desplazamiento horizontal.
�̈�𝑧, �̇�𝑧, 𝑊𝑧 , Aceleración, velocidad y desplazamiento verticales del disco de la
masa m.
�̈�𝑦 , �̇�𝑦, 𝑉𝑦, Aceleración, velocidad y desplazamiento horizontales del disco
de la masa m.
, ,y y y Aceleración, velocidad y desplazamiento vertical.
α Aceleración angular.
β Posición angular de la masa de desbalance.
Δ𝐾𝜁 Pérdida de rigidez debido a la apertura de la fisura.
∊ Incremento en el tiempo.
Velocidad de rotación del rotor.
1. Introducción.
Cuando se pone en marcha una máquina rotatoria, aun
estando en sus parámetros de funcionamiento
convencionales, se genera en ella vibraciones y ruido a raíz
de diversas causas como son cargas no uniformes a lo largo
del eje, lubricación inadecuada, etc. [1]. Todos estos
ISSN 2448-5551 DM 7 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
acontecimientos incrementan la posibilidad de falla a causa
de la fatiga en ejes rotatorios, la cual es la principal causante
de la formación de fisuras en componentes dinámicos [2].
Inspeccionar en línea una maquinaria rotatoria presenta
algunos inconvenientes, ya que, al estar en funcionamiento
hace que se dificulte la detección de fisuras. La presencia de
éstas en grandes turbinas ha ocasionado fallas catastróficas
en la industria [3], lo que ha dado como resultado la
necesidad de estudiar la respuesta de vibración de sistemas
rotodinámicos a causa de la presencia de fisuras o grietas en
el rotor y así desarrollar nuevas técnicas de identificación de
fisuras en etapa incipiente. La presencia de fisuras en el
sistema, por muy pequeñas que estas sean, cambia el
comportamiento dinámico general del sistema, ya que, al
reducir la rigidez local adiciona flexibilidad en el elemento
fisurado y en consecuencia modifica el comportamiento del
rotor comparado con su estado inicial sin la existencia de la
fisura.
La fiabilidad en un criterio para la inspección de
cualquier falla es importante en cuanto a la dinámica del
rotor, ya que, la velocidad de propagación de una fisura
aumenta exponencialmente estando en operación el sistema,
lo cual tiene consecuencias importantes en la industria.
Existen numerosas investigaciones realizadas hasta el
momento que se han enfocado en la determinación de
características vibratorias de un rotor fisurado, considerando
criterios como frecuencias naturales, formas modales,
diagramas de Bode, etc. Sin embargo, no son lo
suficientemente precisos para obtener una detección en
estado incipiente de las fisuras.
Actualmente, existe una metodología de identificación la
cual difiere de los métodos convencionales, esta
metodología se basa en el álgebra lineal y calculo
operacional para el desarrollo de estimadores que permiten
conocer parámetros desconocidos partiendo del modelo
matemático del sistema [4]. A su vez los estimadores
desarrollados permiten realizar la detección de los
parámetros requeridos en línea en tiempo continuo o
discreto, asimismo, los identificadores desarrollados son
expresiones matemáticas que son independientes de las
condiciones iniciales del sistema [5]. El método de
identificación algebraica ya ha sido empleado para
identificar parámetros de sistemas rotodinámicos, por
ejemplo, la magnitud y posición angular a velocidad
constante [6] y velocidad variable [7] .
En este trabajo, se presenta el desarrollo de un modelo
para la estimación en línea de grietas en un sistema rotor-
chumacera tipo Jeffcott y se basa en el método de
identificación algebraica en línea reportado por Fliess y
Sira-Ramírez [5]. La ventaja que ofrece el modelo
propuesto, radica en que solo se necesita la respuesta de
vibración en línea del sistema como dato de entrada, además
de que la identificación se puede realizar a velocidad
constante o velocidad variable del rotor, sin la necesidad de
llevar el rotor a su velocidad nominal pasando por la
resonancia del sistema.
2. Modelo de rotor Jeffcott fisurado.
Para el estudio se consideró un modelo de bisagra simple,
que representa el respiro de la grieta en el rotor [8] En la
Figura 1 muestra el sistema rotodinámico simple con el eje
agrietado tomando como referencia un sistema coordenado
inercial x-y y rotatorio ζ- η.
Figura 1 Detalles del modelo del rotor agrietado [9]
De acuerdo con Sekhar [9], la ecuación de movimiento
correspondiente al rotor fisurado se puede expresar como:
11 12
21 22
2
0 0
0 0
cos
0 sin
z z z
y y y
W W Wk km c
k km c
mgme
V V V
(1)
Donde 𝜃 = 𝜔𝑡 + 𝛽. La ec. (1) también puede
escribirse como:
0, uMu Cu K u t u P P (2)
Como se muestra en la referencia [10], si se considera
que los efectos del peso predominan en el comportamiento
vibratorio del rotor, es decir Δ𝑢(𝑡) ≪ 𝑢0, las ecuaciones con
la matriz de rigidez no lineal y variable en el tiempo, se
pueden simplificar a ecuaciones en términos de rigidez
lineales y periódicos variables en el tiempo, lo que da como
resultado para la deformación elástica, la siguiente ecuación:
0 0
( ) ( )u
M u C u K K t u K t u P (3)
Donde el término ∆𝐾(𝑡)Δ𝑢 puede despreciarse si se
garantiza la estabilidad del sistema. En la ec. (3) Δ𝑢(𝑡) es el
vector que describe el comportamiento vibratorio del rotor y
𝑢0 es la deflexión estática del eje sin fisura. De acuerdo con
Sekhar [10] entonces la matriz de rigidez para una flecha
fisurada se puede expresar como:
0
0
0
( )
0 1 cos (2 ) sin (2 )1( )
0 sin (2 ) 1 cos (2 )2
K K t
kf t K
k
(4)
ISSN 2448-5551 DM 8 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Donde 𝑓(𝑡) es una función escalón y representa el
respiro de la fisura (modelo bisagra) tal y como se muestra
en la Figura 2
Figura 2 Comportamiento del respiro de la fisura.
Tomando como referencia la Figura 2, matematicamente
el respiro de la fisura se puede representar como:
1 2 2 2( ) cos cos 3 cos 5
2 3 5f t
(5)
Sustituyendo la ec. (4) en la ec. (3) se obtiene que la
ecuación de movimiento correspondiente a un rotor
fracturado, puede expresarse como:
0
0
00 0
00 0
1 cos (2 ) sin (2 )1( )
sin (2 ) 1 cos (2 ) 02
est
z z z
y y y
W W Wkm c
V V Vkm c
t t W Fxf t K
t t Fy
(6)
Donde ∆𝐾𝜁 es el cambio de la rigidez en el eje
perpendicular a la línea de fisura dada por:
0(1 )*pK K k (7)
2.1 Simulación del sistema.
Para las simulaciones del comportamiento vibratorio del
rotor con y sin fisura se consideró el rotor utilizado por
Sekhar et al.[10], ver Figura 3, el sistema rotodinámico es
un rotor tipo Jeffcott de dos grados de libertad, donde la
masa del eje se considera despreciable, así como, la rigidez
y amortiguamiento en los soportes. Para la solución del
modelo matemático del rotor correspondiente a la ec. (6) se
utilizó el método de integración de Newmark, utilizando
rampas de excitación de tipo lineal.
Figura 3 Modelo del rotor.
En la Tabla 1 se muestran los datos del rotor simulado.
Tabla 1 Datos del rotor [10]
Datos
𝒎 = 𝟓𝟏𝒌𝒈 𝑊𝑒𝑠𝑡 = 0.5 𝑚𝑚
𝒆 = 𝟎. 𝟎𝟏 𝒎𝒎 𝑘0 = 9.99 × 105 𝑁/𝑚
∆𝒕 = 𝟎. 𝟎𝟎𝟏𝒔 𝜔0 = √𝑔/𝑊𝑒𝑠𝑡
𝑘𝑝 = 0.95
La respuesta de vibración obtenida en la dirección
vertical considerando el rotor con y sin fractura se muestra
en la Figuras 4-7 Para el análisis, se consideró diferentes
valores de aceleración angular 𝛼=30, 50, 70 y 100 rad/s2 y
una profundidad de fractura de Kp=0.95.
En la Figura 4, se puede apreciar que la respuesta de
vibración del rotor sufre cambios cuando existe la presencia
de una fractura o grieta en el sistema, además de que la
respuesta es función de la aceleración angular de la rampa
de excitación, se puede observar que conforme la
aceleración aumenta, la respuesta de vibración del rotor se
distorsiona. Actualmente se han desarrollado diversas
técnicas que permiten determinar la presencia de una fisura
[10,11], sin embargo ninguna de ellas predice la profundidad
y/o posición de la grieta.
Figura 4 Respuesta en el tiempo de desplazamiento a α= 30 rad/s2 a)
sin fisura y b) con fisura de Kp=0.95.
a)
b)
ISSN 2448-5551 DM 9 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Figura 5 Respuesta en el tiempo de desplazamiento a α= 50 rad/s2 a)
sin fisura y b) con fisura de Kp=0.95.
Figura 6 Respuesta en el tiempo de desplazamiento a α= 75 rad/s2 a)
sin fisura y b) con fisura de Kp=0.95.
a)
b)
Figura 7 Respuesta en el tiempo de desplazamiento a α= 100 rad/s2 a)
sin fisura y b) con fisura de Kp=0.95.
3. Identificador de grietas a velocidad constante.
3.1 Modelo matemático del identificador de grietas a
velocidad constante.
Siguiendo la metodología propuesta por Fliess y Sira-
Ramírez [12] para el método de identificación algebraica, se
considera el modelo matemático de un rotor tipo Jeffcott de
dos grados de libertad con grietas, ec. (6), éstas se
multiplican por t2 y se integran dos veces con respecto al
tiempo t. Con lo anterior, se obtienen las relaciones del
identificador algebraico de la grieta del rotor que considera
como variable a detectar, la profundidad de la fisura, es decir
el parámetro Kp que se obtiene a partir de la ec. (7). Para un
sistema rotodinámico de dos grados de libertad, se tiene que:
( 2)
2
0
( 2)
2 21( ) 1 cos 2 cos( )
2est
mx cx k x t
K W f t t me t t
(8)
( 2 )
2
0
( 2 )
2 21( ) sin 2 sin ( )
2est
my cy k y t
K W f t t me t t
(9)
a)
b)
a)
b)
ISSN 2448-5551 DM 10 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Donde ∫ 𝜑(𝑡)2 Son integrales iteradas en el tiempo de la
forma ∫ ∫ … ∫ 𝜑(𝜎𝑛)𝑑𝜎𝑛 … 𝑑𝜎1𝜎𝑛−1
0𝜎1
0𝑡
0 con ∫ 𝜑(𝑡) =
∫ 𝜑(𝜎)𝑑𝜎𝑡0 y n un entero positivo.
Las ecs. (8) y (9) se integran por partes y mediante un
tratamiento matemático pueden expresarse en un sistema de
ecuaciones lineales, tal y como se muestra a continuación:
( 2 ) ( 2 ) ( 2 )
2 2 2
( 2) ( 2 )
2 2
( 2) ( 2)
2 2 2 2
4 2 2
1( ) ( ) cos(2 )
2
cos cos( ) sin ( )
est
mt x m tx m x ct x ctx kt
K W f t t f t t t
me t t me t sen t
(10)
(2) (2) (2)
2 2 2
(2)
2
(2) (2)
2 2 2 2
4 2 2
1( ) sin(2 )
2
cos cos( ) sin sin( )
est
mt y m ty m x ct y cty kt
K X f t t t
me t t me t t
(11)
De la relación ∆𝐾𝜁 a partir de las ecs. (10) y (11) se
despeja el término a identificar Kp que corresponde a la
profundidad de la fisura. Como Kp es un valor constante
independiente de las coordenadas x y y se pueden obtener
dos expresiones matemáticas para el identificador de la
grieta.
A partir de la ec. (10) y reacomodando todos los
términos de manera correcta se tiene que:
( )
( )
x
px
x
n tK
d t (12)
Con: (2)
2 2
(2)
2 2
(2) (2) (2)
2 2 2
(2) (2)
2 2
( ) cos cos( )
sin sin ( )
4 2 2
1( ) ( ) cos(2 )
2
xn t me t t
me t t
mt x m tx m x ct x ctx kt x
mg f t t f t t t
( 2) ( 2)
2 21( ) ( ) ( ) cos(2 )
2x
d t mg f t t f t t t
De manera similar, a partir de la ec. (11) y reacomodando
todos los términos de manera correcta se tiene que:
( )
( )
y
py
y
n tK
d t (13)
(2) (2)
2 2 2 2
(2) (2) (2)
2 2 2
(2)
2
( ) cos sin ( ) sin cos( )
4 2 2
1( ) sin(2 )
2
yn t me t t me t t
mt y m ty m y ct y cty kt y
mg f t t t
( 2)
21( ) ( ) (2 )
2sin
yd t mg f t t t
Las ecs. (12) y (13) son válidas siempre y cuando el
denominador para Kpx y Kpy sea distinto a cero. Como se
puede observar, ahora los identificadores Kpx y Kpy son
función del tiempo y de la respuesta de vibración del rotor
{x} y {y} respectivamente.
Por tanto, el parámetro Kp identificado a partir de las ecs.
(12) y (13) son válidos para:
0 0
0
[ , ]
( )
( )
p px py
arbitrario t t t
K K K n tt t
d t
(14)
Como se puede observar en las ecs. (12) y (13), el
identificador de la profundidad de la grieta es independiente
de las condiciones iniciales del sistema y únicamente
dependiente de la respuesta de vibración (desplazamiento)
del sistema.
3.2 Simulación del comportamiento del modelo
matemático del identificador de grietas
Para observar el comportamiento en función del tiempo
de los identificadores de grietas desarrollados, se consideró
la respuesta de vibración a velocidad constante obtenida de
la simulación del modelo matemático del rotor
correspondiente a la Figura 4, ec. (6). Para la solución del
sistema, se utilizó el método de integración numérica de
Newmark. Para el análisis se consideró una velocidad del
rotor de 2000 rpm.
En la Figura 8 se muestra la respuesta de vibración en las
direcciones x y y a velocidad constante para el rotor sin
fractura, es decir Kp=1
Por otra parte, en las Figuras 8-10 se muestra la
respuesta de vibración en las direcciones x y y a velocidad
constante para el rotor con fractura con Kp=0.999, 0.99 y
ISSN 2448-5551 DM 11 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
0.95 respectivamente.
La respuesta de vibración correspondiente a las
Figuras 9-12, se toman como datos de entrada para evaluar
los modelos de los identificadores de grietas de las ecs. (12)
y (14).
Figura 8 Señal de vibración a velocidad constante cuando Kp=1.
Figura 9 Señal de vibración a velocidad constante cuando Kp=0.999.
Figura 10 Señal de vibración a velocidad constante cuando Kp=0.99.
En las Figuras 12-15 se presenta el comportamiento en
función del tiempo de los identificadores Kpx y Kpy. En todos
los caso se puede observar que en menos de 1 segundo los
identificadores convergen al valor correspondiente de Kp.
Figura 11 Señal de vibración a velocidad constante cuando Kp=0.95.
De la respuesta de vibración que se muestra en las
Figuras 10 y 11 respectivamente, se puede observar que no
existen cambios significativos en la respuesta de vibración
del rotor cuando el sistema se encuentra sin grieta
comparada con la respuesta de vibración del sistema cuando
presenta la presencia de una grieta en estado incipiente. Sin
embargo el identificador Kp es capaz de identificar la
presencia de la grieta, así como su profundidad de manera
precisa, Figura 13.
Figura 12 Identificador algebraico de profundidad de fisura Kp=1.
Figura 13 Identificador algebraico de profundidad de fisura
Kp=0.999.
ISSN 2448-5551 DM 12 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Figura 14 Identificador algebraico de profundidad de fisura Kp=0.99.
Figura 15 Identificador algebraico de profundidad de fisura Kp=0.95.
4. Identificación de grietas a velocidad variable.
4.1 Modelo matemático identificador de grietas a velocidad
variable.
Para el desarrollo del modelo matemático para el
identificador de grietas considerando velocidad variable, se
modifica el modelo matemático de la ec. (6) correspondiente
a un rotor con grieta de dos grados de libertad tipo Jeffcott.
El modelo matemático de un sistema rotodinámico con
grieta considerando velocidad variable se escribe como:
0
2
1(1 cos 2 )
2
sin ( ) cos( )
estmx cx k x K X t
m e t t
(15)
0
2
1(sin 2 )
2
cos( ) sin( )
estmy cy k y K X t
m e t t
(16)
Siguiendo la metodología propuesta por Fliess y Sira-
Ramírez [12] para el método de identificación algebraica,
las ecs. (15) y (16) se multiplican por t2 y se integran dos
veces con respecto al tiempo t, con lo anterior, se obtienen
las relaciones necesarias para el modelo del identificador
algebraico de la grieta del rotor, el identificador considera
como variable a detectar, la profundidad de la fisura, es decir
el parámetro Kp que se obtiene a partir de la ec. (7). Para un
sistema rotodinámico de dos grados de libertad, se tiene que:
( 2)
2
0
( 2)
2
( 2)
2 2
1(1 cos 2 )
2
sin( ) cos( )
est
mx cx k x t
K X t t
me t t t
(17)
( 2)
2
0
( 2)
2
( 2)
2 2
1(sin 2 )
2
cos( ) sin ( )
est
my cy k y t
K X t t
me t t t
(18)
Donde ∫ 𝜑(𝑡)2 Son integrales iteradas en el tiempo de la
forma ∫ ∫ … ∫ 𝜑(𝜎𝑛)𝑑𝜎𝑛 … 𝑑𝜎1𝜎𝑛−1
0𝜎1
0𝑡
0 con ∫ 𝜑(𝑡) =
∫ 𝜑(𝜎)𝑑𝜎𝑡0 y n un entero positivo.
Las ecs. (17) y (18) se integran por partes y mediante un
tratamiento matemático, éstas pueden expresarse en un
sistema de ecuaciones lineales, tales como: ( 2) ( 2) ( 2)
2 2 2
( 2) ( 2)
2 2
( 2)
2
( 2)
2
4 2 2
1( ) ( ) cos(2 )
2
cos sin( ) 2 sin( )
sin cos( ) 2 cos( )
est
mt x m tx m x ct x ctx kt x
K X f t t f t t t
e m t t t t
e m t t t t
(19)
(2) (2) (2)
2 2 2
(2)
2
(2)
2
(2)
2
4 2 2
1( ) sin (2 )
2
cos cos( ) 2 cos( )
sin sin( ) 2 sin( )
est
mt y m ty m y ct y cty kt y
K X f t t t
e m t t t t
e m t t t t
(20)
De la relación ∆𝑘𝑢∗ a partir de las ecs. (20) y (21) se
despeja el término a identificar Kp que corresponde a la
ISSN 2448-5551 DM 13 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
profundidad de la fisura, ∆𝑘𝑢∗ . Como Kp es un valor
constante independiente de las coordenadas x y y se pueden
obtener dos expresiones matemáticas para el identificador
de la grieta.
A partir de la ec. (19) y reacomodando todos los
términos de manera correcta se tiene que:
( )
( )
xpx
x
n tK
d t (21)
Con: ( 2)
2
( 2)
2
( 2) ( 2) ( 2)
2 2 2
( 2) ( 2)
2 2
( ) cos sin( ) 2 sin( )
cos( ) 2 cos( )
4 2 2
1( ) ( ) cos(2 )
2
xn t e m t t t t
e sen m t t t t
mt x m tx m x ct x ctx kt x
mg f t t f t t t
( 2) ( 2)
2 21( ) ( ) ( ) cos(2 )
2x
d t mg f t t f t t t
De manera similar, a partir de la ec. (20) y
reacomodando términos, se tiene que:
( )
( )
y
py
y
n tK
d t (22)
(2)
2
(2)
2
(2) (2) (2)
2 2 2
(2)
2
( ) cos cos( ) 2 cos( )
sin csin( ) 2 sin( )
4 2 2
1( ) sin(2 )
2
yn t e m t t t t
e m t t t t
mt y m ty m y ct y cty kt y
mg f t t t
(2)
21( ) ( ) sin(2 )
2yd t mg f t t t
Las ecs. (21) y (22) son válidas siempre y cuando el
denominador para Kpx y Kpy sea distinto a cero. Como se
puede observar, ahora los identificadores Kpx y Kpy son
función del tiempo y de la respuesta de vibración del rotor
{x} y {y} respectivamente.
Por tanto, el parámetro Kp identificado a partir de las ecs.
(21) y (22) son válidos para:
0 0
0
[ , ]
( )
( )
p px py
arbitrario t t t
K K K n tt t
d t
(23)
Como se puede observar en las ecs. (21) y (22), el
identificador de la profundidad de la grieta es independiente
de las condiciones iniciales del sistema y únicamente
dependiente de la respuesta de vibración (desplazamiento)
del sistema.
4.2 Simulación del comportamiento del modelo
matemático del identificador de grietas
Para observar el comportamiento en función del tiempo
de los identificadores de grietas desarrollados, se consideró
la respuesta de vibración a velocidad variable obtenida de la
simulación del modelo matemático del rotor
correspondiente a la Fig. 4, ecs. (16) y (17). Para la solución
del sistema, se utilizó el método de integración numérica de
Newmark. Las propiedades y geometría del rotor, se
muestran en la Tabla 1. Para el análisis se consideró rampas
de excitación de tipo lineal.
Figura 16 Señal de vibración a velocidad variable cuando Kp=0.999,
α=100 rad/s2.
En la Figuras 4-7 se muestra la respuesta de vibración
del sistema con rampas de excitación de tipo lineal para
diferentes valores de aceleración angular 𝛼=30, 50, 75 y
100 rad/s2 para un rotor sin fisura en b) y con fisura de
Kp=0.95 en a).
Por otra parte, en las figuras 16 y 17 se muestra la
respuesta de vibración en las direcciones x para el rotor con
fractura con Kp=0.999, 0.99 respectivamente, con una
rampa de excitación con una aceleración angular 𝛼=100
rad/s2.
ISSN 2448-5551 DM 14 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
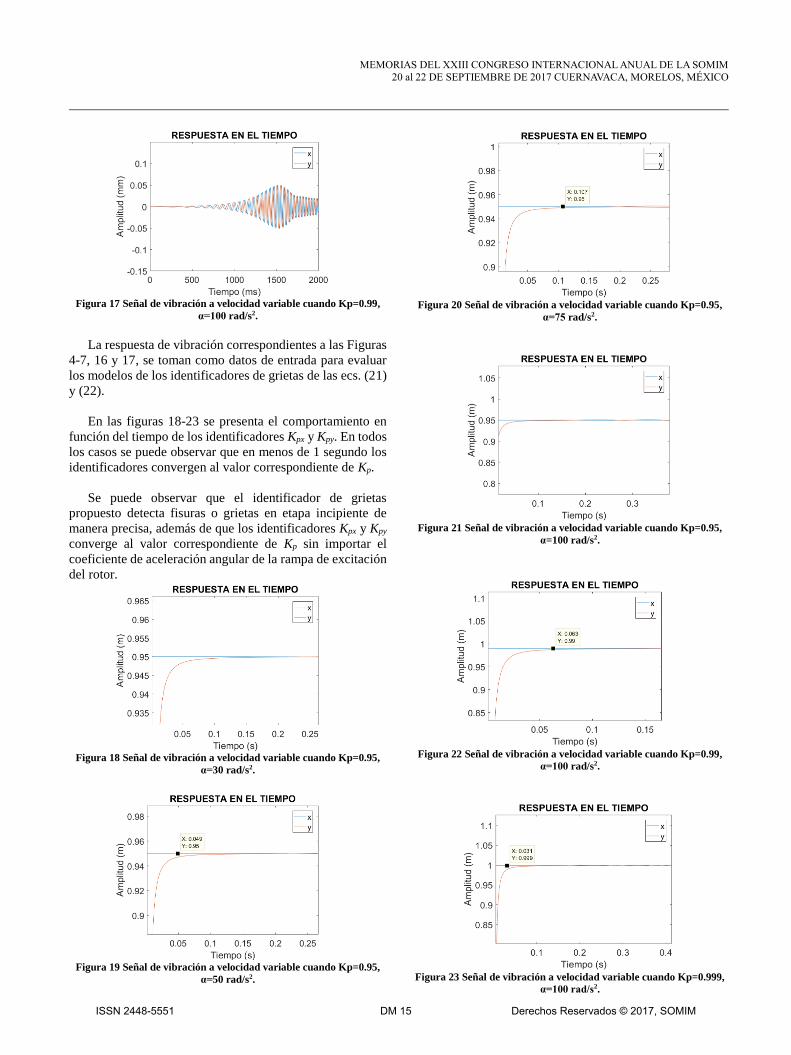
Figura 17 Señal de vibración a velocidad variable cuando Kp=0.99,
α=100 rad/s2.
La respuesta de vibración correspondientes a las Figuras
4-7, 16 y 17, se toman como datos de entrada para evaluar
los modelos de los identificadores de grietas de las ecs. (21)
y (22).
En las figuras 18-23 se presenta el comportamiento en
función del tiempo de los identificadores Kpx y Kpy. En todos
los casos se puede observar que en menos de 1 segundo los
identificadores convergen al valor correspondiente de Kp.
Se puede observar que el identificador de grietas
propuesto detecta fisuras o grietas en etapa incipiente de
manera precisa, además de que los identificadores Kpx y Kpy
converge al valor correspondiente de Kp sin importar el
coeficiente de aceleración angular de la rampa de excitación
del rotor.
Figura 18 Señal de vibración a velocidad variable cuando Kp=0.95,
α=30 rad/s2.
Figura 19 Señal de vibración a velocidad variable cuando Kp=0.95,
α=50 rad/s2.
Figura 20 Señal de vibración a velocidad variable cuando Kp=0.95,
α=75 rad/s2.
Figura 21 Señal de vibración a velocidad variable cuando Kp=0.95,
α=100 rad/s2.
Figura 22 Señal de vibración a velocidad variable cuando Kp=0.99,
α=100 rad/s2.
Figura 23 Señal de vibración a velocidad variable cuando Kp=0.999,
α=100 rad/s2.
ISSN 2448-5551 DM 15 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
5. Conclusión.
Se presenta el desarrollo matemático de dos modelos de
identificación algebraica en línea para detectar fisuras o
grietas en un sistema rotodinámico. Ambos modelos,
requieren de la respuesta de vibración (desplazamiento) del
rotor como dato de entrada a velocidad constante o
velocidad variable (rampas de excitación de tipo lineal). Los
resultados numéricos muestran la convergencia del
identificador propuesto al valor correcto del parámetro Kp en
un tiempo menor a 1 segundo, tanto para el caso de
velocidad constante como para el de velocidad variable.
De los resultados obtenidos, se demuestra que el
identificador propuesto es capaz de detectar fisuras o grietas
en etapa incipiente de manera precisa ya sea a velocidad
constante o velocidad variable, además la identificación se
realiza correctamente sin importar la aceleración angular de
la rampa de excitación del rotor.
La ventaja del método propuesto es que aun cuando
la identificación se puede realizar a velocidad variable, no
es necesario llevar el rotor hasta su velocidad nominal
pasando por la resonancia, para la identificación es
suficiente la respuesta de vibración del rotor en un intervalo
menor de 1 minuto obtenida por debajo de la velocidad de
resonancia del sistema.
Agradecimientos
Agradecemos al Centro Nacional de Investigación y
Desarrollo Tecnológico por su apoyo.
REFERENCIAS
[1] D. A. Estrada, “Caracterización Dinámica de
Rotores Fracturados mediante Transformada
Wavelet,” Centro Nacional de Investigación y
Desarrollo Tecnológico, 2009.
[2] A. Blanco Ortega, J. Colín Ocampo, and M. A.
Oliver S, Deteccion de Fracturas En Linea En
Maquinaria Rotatoria. Editorial Académica
Española, 2012.
[3] N. Bachschmid and P. Pennacchi, “Crack effects in
rotordynamics,” Mech. Syst. Signal Process., vol.
22, no. 4, pp. 761–762, May 2008.
[4] J. G. Mendoza, “Identificador Algebraico en Línea
del Desbalance para un Sistema Rotodinámico,”
CENIDET, 2016.
[5] M. Fliess and H. Sira–Ramírez, “An algebraic
framework for linear identification,” ESAIM
Control. Optim. Calc. Var., vol. 9, no. January, pp.
151–168, Jan. 2003.
[6] C. Ocampo, M. Larios, J. Gabriel, B. Ortega, J. C.
Ocampo, J. Gabriel, M. Larios, and A. B. Ortega,
“Determinación del Desbalance en Sistemas Rotor-
cojinete a velocidad constante : Método de
Identificación Algebraica,” 2016.
[7] J. G. M. Larios, J. C. Ocampo, A. B. Ortega, A. A.
Pliego, and E. S. G. Wing, “Balanceo Automático
de un Sistema Rotor-Cojinete: Identificador
Algebraico en Línea del Desbalance Para un
Sistema Rotodinámico,” pp. 1–4, 2016.
[8] A. S. Sekhar and B. S. Prabhu, “Crack detection and
vibration characteristics of cracked shafts,” J. Sound
Vib., vol. 157, no. 2, pp. 375–381, Sep. 1992.
[9] A. S. Sekhar, “Crack detection through Wavelet
transform for a run-up rotor,” J. Sound Vib., vol.
259, no. 2, pp. 461–472, Jan. 2003.
[10] A. S. Sekhar and B. S. Prabhu, “Condition
monitoring of cracked rotors through transient
response,” Mech. Mach. Theory, vol. 33, no. 8, pp.
1167–1175, 1998.
[11] G.-L. Qian, S.-N. Gu, and J.-S. Jiang, “The dynamic
behaviour and crack detection of a beam with a
crack,” J. Sound Vib., vol. 138, no. 2, pp. 233–243,
Apr. 1990.
[12] F. Beltrán Carbajal, S. N. G., S. R. H, and B. O. A.,
“Active Vibration Control Using On-line Algebraic
Identification and Sliding Modes,” vol. 13, no. 3, pp.
313–330, 2010.
ISSN 2448-5551 DM 16 Derechos Reservados © 2017, SOMIM