Ident Motor
25
Identificación de sistemas Tarea. Identificación de la maqueta del motor de CD Daniel Alberto López Ramírez Cuernavaca Morelos a15 de diciembre de 2012 Antes de iniciar el proceso de identificación programado en MATLAB Primero se visualizan los datos de entrada-salida del motor al que denominaremos sistema, en la Figura 1. Podemos observar que la ganancia del sistema es menor a uno, porque su respuesta no alcanza a la referencia. Figura 1. Datos de entrada-salida del sistema. En la Figura 2 podemos ver que el sistema parece no estabilizarse y que es de un orden alto por su subida abrupta. 0 50 100 150 200 250 300 350 400 450 500 0 0.5 1 1.5 2 2.5 3 3.5 4 Tiempo en s A m p l i t u d Datos de entrada-salida del motor
-
Upload
alberto-ramirez -
Category
Documents
-
view
30 -
download
0
Transcript of Ident Motor
-
Identificacin de sistemas
Tarea. Identificacin de la maqueta del motor de CD
Daniel Alberto Lpez Ramrez
Cuernavaca Morelos a15 de diciembre de 2012
Antes de iniciar el proceso de identificacin programado en MATLAB
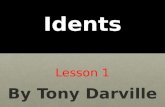
Primero se visualizan los datos de entrada-salida del motor al que denominaremos sistema, en la Figura 1.
Podemos observar que la ganancia del sistema es menor a uno, porque su respuesta no alcanza a la referencia.
Figura 1. Datos de entrada-salida del sistema.
En la Figura 2 podemos ver que el sistema parece no estabilizarse y que es de un orden alto por su subida
abrupta.
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
2
2.5
3
3.5
4
Tiempo en s
Am
plit
ud
Datos de entrada-salida del motor
-
Figura 2. Respuesta del sistema a la entrada escaln
En la Figura 3 se observa que el sistema es estable debido que su respuesta al impulso cae a cero.
Figura 2. Respuesta del sistema a la entrada impulso.
En la Figura 3 se nota que el sistema es sub amortiguado y un filtro pasa bajas, lo cual tomaremos en cuanta al
elegir los polos.
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema a la entrada escaln unitario
Sistema
0 5 10 15 20 25 30
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time
Am
plit
ud
Respuesta del sistema a la entrada impulso
Sistema
-
Figura 3. Diagrama de Bode en amplitud del sistema.
En la Figura 4 se observa que el desfase del sistema llega al por lo que hay ms polos que ceros.
Figura 4. Diagrama de Bode en fase del sistema.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Frecuencia
Am
plit
ud e
n d
ecib
ele
s
Diagrama de Bode: Amplitud
Sistema
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Frecuencia
Gra
dos
Diagrama de Bode: Fase
Sistema
-
Identificacin del modelo ARX
El primer paso del proceso es seleccionar los rdenes del sistema, despus de varias pruebas se not que los
rdenes de deben ser iguales para que el diagrama de bode en amplitud y fase sigan la forma del sistema. En la tabla 1 se muestran los rdenes seleccionados para el modelo ARX.
Tabla 1. rdenes para los modelos ARX
3 3 1
4 4 1
En la Figura 5 se observa la respuesta del sistema y los modelo ARX a la entrada PRBS, se nota que la similitud
es muy parecida pero el modelo ARX1 es mejor, ya que no tiene un sobre impulso tan grande como el modelo
ARX1.
Figura 5. Respuesta del sistema a la entrada PRBS.
En la Figura 6 se observa que el modelo ARX2 es mejor por el sobre impulso que tiene el sistema, pero aun as
ningn modelo iguala la respuesta del sistema.
20 40 60 80 100 120 140
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
3.4
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARX a la entrada PRBS
Sistema
ARX1:87.7248%
ARX2:87.2053%
-
Figura 6. Respuesta del sistema a la entrada escaln.
En la Figura 7 se nota que el modelo ARX2 tiene mejor ndice de similitud, aunque es de mayor orden, por eso
con el desempeo de los modelos para la entrada impulso no se puede tomar una decisin sobre cul es el mejor
modelo.
Figura 7. Respuesta de los modelos ARX y el sistema a la entrada impulso.
En la Figura 8 se aprecia que los dos modelos siguen bien la respuesta del sistema aunque el modelo ARX2
logra reproducir mejor uno de los sobre impulsos.
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARX a la entrada escaln
Sistema
ARX1:21.597%
ARX2:27.7443%
0 5 10 15 20 25 30 35 40
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARX a la entrada impulso
Sistema
ARX1:90.6474%
ARX2:92.6993%
-
Figura 8. Diagrama de Bode en amplitud de los modelos ARX y el sistema.
En la Figura 9 se nota que la forma de los modelos en el diagrama de Bode en fase es similar al diagrama de
bode en fase del sistema, aunque ninguno de los modelos logra reproducir la forma inicial que es la mas
importante por ser un filtro pasa bajas.
Figura 9. Diagrama de Bode en fase de los modelos y del sistema.
En la Figura 10 se muestra el mapa de polos y zeros de los modelos, ninguno es inestable pero el mejor es el
modelo ARX2, ya que el coeficiente de amortiguamiento es pequeo como posiblemente lo es el del sistema.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Frecuencia
Am
plit
ud e
n d
ecib
ele
s
Diagrama de Bode: Amplitud
Sistema
ARX1
ARX2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Frecuencia
Gra
dos
Diagrama de Bode: Fase
Sistema
ARX1
ARX2
-
Figura 10. Mapa de polos y zeros de los modelos ARX.
Las funciones de transferencia discretas de los modelos ARX son:
Funcin de transferencia discreta ARX1 para los rdenes. [3 3 1]
0.3538 z^2 - 0.1487 z - 0.1035
-----------------------------------------------
z^3 - 1.043 z^2 - 0.004928 z + 0.1794
Funcin de transferencia discreta ARX2 para los rdenes [4 4 1].
0.3552 z^3 - 0.1031 z^2 - 0.06829 z - 0.1097
-----------------------------------------------------------------
z^4 - 0.9198 z^3 + 0.01181 z^2 - 0.1841 z + 0.1879
Debido al mapa de polos y zeros el modelo ARX2 es la mejor opcin, ya que su coeficiente de amortiguacin es
menor que el del modelo ARX1, porque los ndices de similitud son mayores y porque la forma del diagrama de
bode en amplitud es ms similar a la del sistema en su parte inicial.
Identificacin de modelo ARMAX
El primer paso del proceso es seleccionar los rdenes del sistema, despus de varias pruebas tomamos los
rdenes de deben ser iguales para que el diagrama de bode en amplitud y fase sigan la forma del sistema. En la tabla 2 se muestran los rdenes seleccionados para el modelo ARMAX, ordenes ms altos, se
ajustaban bien, a la forma del diagrama de Bode del sistema pero el sobre impulso de la respuesta al escaln y a
la PRBS era muy grande.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Mapa de polos y zeros
Real Axis
Imagin
ary
Axis
ARX1
ARX2
-
Tabla 2. rdenes para los modelos ARMAX
2 2 2 1
3 3 1 1
En la Figura 11 se puede apreciar que el sobre impulso de modelo ARMAX2 es mayor que el del modelo
ARMAX1 y entre mayor es el orden del modelo mayor es el sobre impulso. El modelo ARMAX1 es mejor en
esta prueba.
Figura 11. Respuesta de los modelos y el sistema a la entrada PRBS.
En la Figura 12 se aprecia que el modelo ARMAX1 no llega a tener el sobre impulso del sistema, el modelo
ARMAX2 es mejor en esta prueba, aunque su tiempo de estabilizacin parece ser mayor.
0 10 20 30 40 50 60 70 80 90 100
0
0.5
1
1.5
2
2.5
3
3.5
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARMAX a la entrada PRBS
Sistema
ARMAX1:87.645%
ARMAX2:43.7107%
-
Figura 12. Respuesta al escaln de los modelos y el sistema.
En la Figura 13 se nata que los dos modelo tienen la misma forma que la respuesta del sistema, en esta prueba
solo se toma en cuenta el ndice de similitud para seleccionar el mejor y es el modelo ARMAX2.
Figura 13. Respuesta del sistema al impulso.
En la Figura 14 se muestra que en la parte inicial del diagrama de Bode en amplitud el modelo ARMAX1 es
superior al modelo ARMAX2, pues logra reproducir mejor la parte inicial de la grafica.
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARMAX a la entrada escaln
Sistema
ARMAX1:25.4318%
ARMAX2:36.4863%
0 5 10 15 20 25 30 35 40
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time
Am
plit
ud
Respuesta del sistema, y la estructura ARMAX a la entrada impulso
Sistema
ARMAX1:92.5562%
ARMAX2:96.022%
-
Figura 14. Diagrama de Bode en amplitud del sistema y los modelos.
En la Figura 15 se aprecia que los dos modelos reproducen bien la forma del sistema en el diagrama de fase,
aunque ninguno puede reproducir la parte inicial pues es muy difcil.
Figura 15. Diagrama de Bode en fase para los modelos y el sistema.
En la Figura 16 se puede notar que ninguno de los dos modelos podra reproducir la dinmica del sistema pues
tienen un coeficiente de amortiguamiento alto y el sistema parece tener uno bajo, tambin se nota que ningn
sistema es inestable.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Frecuencia
Am
plit
ud e
n d
ecib
ele
s
Diagrama de Bode: Amplitud
Sistema
ARMAX1
ARMAX2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Frecuencia
Gra
dos
Diagrama de Bode: Fase
Sistema
ARMAX1
ARMAX2
-
Figura 16. Mapa de polos y zeros de los modelos.
Funcin de transferencia discreta de los modelos.
ARMAX1 para los rdenes [2 2 2 1]
0.3538 z - 0.3129
----------------------------
z^2 - 1.502 z + 0.5553
ARMAX2 para los rdenes [3 3 1 1]
0.3574 z^2 - 0.3455 z - 0.01084
-------------------------------------------------
z^3 - 1.604 z^2 + 0.6046 z + 0.0005059
Debido a que en los ndices de similitud el modelo ARMAX1 no est muy por debajo del modelo ARMAX2 y
por su mayor similitud en el diagrama de Bode en amplitud, el modelo elegido es el ARMAX1.
Identificacin de modelo OE
El primer paso del proceso es seleccionar los rdenes del sistema, despus de varias pruebas tomamos los
rdenes de deben ser iguales para que el diagrama de Bode en amplitud y fase sigan la forma del sistema. En la tabla 3 se muestran los rdenes seleccionados para el modelo OE, ordenes ms altos, se ajustaban
bien, a la forma del diagrama de Bode del sistema pero el sobre impulso de la respuesta al escaln y a la PRBS
era muy grande.
Tabla 3. rdenes para los modelos OE
2 2 1
3 3 1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Mapa de polos y zeros
Real Axis
Imagin
ary
Axis
ARMAX1
ARMAX2
-
En la Figura 17 se puede apreciar que el sobre impulso de los modelos OE es menor que para las estructuras
pasadas y que son muy parecidos entre ellos por lo que no es posible decidir cul es el mejor observando esta
prueba.
Figura 17. Respuesta del sistema y los modelos OE a la entrada PRBS.
En la Figura 18 tampoco se puede apreciar alguna diferencia entre las respuestas de los modelos.
Figura 18. Respuesta del sistema y de los modelos a la entrada escaln.
En la Figura 19 se muestra que la respuesta de los modelos no alcanza a la respuesta del sistema y aun son muy
semejantes entre ellas.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
Time
Am
plit
ud
Respuesta del sistema, y la estructura OE a la entrada PRBS
Sistema
OE1:88.5255%
OE2:88.5864%
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema, y la estructura OE a la entrada escaln
Sistema
OE1:21.5459%
OE2:22.7925%
-
Figura 19. Respuesta de los modelos y el sistema a la entrada impulso.
En la Figura 20 se nota que la forma del diagrama de Bode en amplitud de los modelos tiene la forma del
sistema pero ninguno logra reproducir los primeros sobre impulsos correctamente.
Figura 20. Diagrama de Bode en amplitud del sistema y de los modelos OE.
En la Figura 21 se muestra que los modelos son muy similares en cuanto a sus diagramas de Bode en fase y
logran seguir muy bien al sistema por lo que los rdenes estn bien seleccionados.
0 2 4 6 8 10 12 14 16 18 20
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time
Am
plit
ud
Respuesta del sistema, y la estructura OE a la entrada impulso
Sistema
OE1:91.4182%
OE2:91.5926%
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Frecuencia
Am
plit
ud e
n d
ecib
ele
s
Diagrama de Bode: Amplitud
Sistema
OE1
OE2
-
Figura 22. Diagrama de bode en fase de los modelos y del sistema.
En la Figura 23 se aprecia que ningn modelo es inestable, pero los coeficientes de amortiguamiento son altos a
diferencia de los del sistema que se presume que son bajos.
Figura 23. Mapa de polos y zeros de los modelos.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Frecuencia
Gra
dos
Diagrama de Bode: Fase
Sistema
OE1
OE2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Mapa de polos y zeros
Real Axis
Imagin
ary
Axis
OE1
OE2
-
Funciones de transferencia de los modelos OE
Funcin de trasferencia para los rdenes [2 2 1]
0.3454 z - 0.2999
----------------------------
z^2 - 1.476 z + 0.5351
Funcin de transferencia para los rdenes [3 3 1]
0.3437 z^2 - 0.4314 z + 0.1087
--------------------------------------------
z^3 - 1.876 z^2 + 1.115 z - 0.2116
Basados en los ndices de similitud y en el diagrama de Bode no es posible seleccionar un modelo OE, as que se
elegir el de menor orden, que es el modelo OE1.
Identificacin de modelo BJ
Como en el caso de la estructura de modelo OE en la estructura BJ los rdenes deben ser iguales para que el diagrama de Bode en amplitud y fase sigan la forma del sistema, que las respuestas a las entradas PRBS, escaln e impulso no estn desfasados de la del sistema. En la tabla 4 se muestran los rdenes
seleccionados para el modelo BJ.
Tabla 3. rdenes para los modelos OE
2 2 2 2 1
3 2 3 2 1
En la Figura 24 se puede observar que el modelo BJ1 es el que mejor se ajusta a la respuesta del sistema porque
es menor oden.
-
Figura 24. Respuesta del sistema y de los modelos BJ a la entrada PRBS.
En la Figura 25 se observa que el modelo que mejor se ajusta es el BJ2, aunque no se estabiliza en el mismo
nivel que el sistema.
Figura 25. Respuesta del sistema y de los modelos a la entrada escaln.
En la Figura 26 se aprecia que los dos modelo responde de manera similar al sistema aunque un poco mejor el
BJ2 debido a su orden mayor.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
3.5
Time
Am
plit
ud
Respuesta del sistema, y la estructura BJ a la entrada PRBS
Sistema
BJ1:87.8118%
BJ2:52.5534%
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema, y la estructura BJ a la entrada escaln
Sistema
BJ1:25.2357%
BJ2:69.3878%
-
Figura 26. Respuesta del sistema y de los modelos a la entrada impulso.
En la Figura 27 se nota que los dos modelos siguen la forma del sistema, aunque el BJ1 Reproduce mejor la
primera parte de la grafica.
Figura 27. Diagrama de Bode en amplitud del sistema y de los modelos
En la Figura 28 se aprecia al igual que en el diagrama de amplitud que los dos modelo logran un
comportamiento similar al del sistema, pero el modelo BJ parece ser un poco mejor.
0 5 10 15 20 25 30 35
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time
Am
plit
ud
Respuesta del sistema, y la estructura BJ a la entrada impulso
Sistema
BJ1:92.1873%
BJ2:95.0602%
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Frecuencia
Am
plit
ud e
n d
ecib
ele
s
Diagrama de Bode: Amplitud
Sistema
BJ1
BJ2
-
Figura 28. Diagrama de Bode en fase para el sistema y para los modelos.
En la figura 29 se mapean los polos y zeros de los modelo BJ se puede observar que ninguno es inestable.
Figura 29. Mapa de polos y zeros de los modelo.
Funciones de transferencia de los modelos BJ
Funcin de transferencia para los rdenes [2 2 2 2 1].
0.353 z - 0.3054
-----------------------------
z^2 - 1.483 z + 0.5444
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Frecuencia
Gra
dos
Diagrama de Bode: Fase
Sistema
BJ1
BJ2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Mapa de polos y zeros
Real Axis
Imagin
ary
Axis
BJ1
BJ2
-
Funcin de transferencia para los rdenes [3 2 3 2 1].
0.3552 z^2 - 0.3951 z + 0.0637
-----------------------------------
z^3 - 1.742 z^2 + 0.9006 z - 0.1303
Debido a la similitud en el diagrama de Bode en amplitud y a los ndices de similitud para la respuesta a las
entradas PRBS, escaln e impulso el modelo que se eligi es el BJ1.
Eleccin del mejor modelo
En la Figura 30 se observan las respuestas de los sistemas a la entrada PRBS, el mejor es el modelo OE, es el
que alcanza mejor la amplitud y la forma.
Figura 30. Respuesta del sistema y de los modelos a la entrada PRBS.
En la Figura 31 se observan las respuestas de los modelos a la entrada escaln, el mejor es el modelo ARX,
aunque ningn modelo logro una buena similitud en esta prueba.
0 5 10 15 20 25 30 35 40
0.5
1
1.5
2
2.5
3
Time
Am
plit
ud
Respuesta del sistema, y las estructuras a la entrada PRBS
Sistema
ARX:87.2053%
ARMAX:87.645%
OE:88.5255%
BJ:87.8118%
-
. Figura 31. Respuesta del sistema y de los modelos a la entrada escaln.
En la Figura 32 se observan las respuestas de los modelos a la entrada impulso, el mejor es el modelo ARX,
porque tiene el ndice de similitud mayor.
Figura 32. Respuesta del sistema y los modelos a la entrada impulso.
En la Figura 33 se muestra que el modelo OE es el que ms se asemeja al sistema.
0 20 40 60 80 100 120-0.2
0
0.2
0.4
0.6
0.8
1
Time
Am
plit
ud
Respuesta del sistema, y las estructuras a la entrada escaln
Sistema
ARX:27.7443%
ARMAX:25.4318%
OE:21.5459%
BJ:25.2357%
0 20 40 60 80 100 120-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Time
Am
plit
ud
Respuesta del sistema, y las estructuras a la entrada impulso
Sistema
ARX:92.6993%
ARMAX:92.5562%
OE:91.4182%
BJ:92.1873%
-
Figura 33. Diagrama de amplitud de Bode del sistema y los modelos.
En la Figura 34 no hay forma de seleccionar el mejor modelo.
Figura 34. Diagrama de Bode en fase para el sistema y los modelos.
En la Figura 35 se muestra que el modelo ARMAX podra tener una dinmica ms parecida a la del sistema ya
que su coeficiente de amortiguamiento es menor que en los dems sistemas, y para esta prueba es el mejor
modelo, no hay ningn modelo inestable.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
Time
Am
plit
ud e
n d
B
Diagrama de Bode: Amplitud
Sistema
ARX
ARMAX
OE
BJ
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-200
-150
-100
-50
0
50
Time
Gra
dos
Diagrama de Bode: Fase
Sistema
ARX
ARMAX
OE
BJ
-
Figura 35. Mapa de polos y zeros de los modelos
En la Figura 36 se muestra la funcin de correlacin de residuos y la funcin de correlacin cruzada para el
modelo ARX, y se observa que no todos los datos estn dentro del ndice de confianza.
Figura 36.
En la Figura 37 se muestra la funcin de correlacin de residuos y la funcin de correlacin cruzada para el
modelo ARMAX, y se observa que no todos los datos estn dentro del ndice de confianza.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1/T
0.2/T
0.3/T
Mapa de polos y zeros
Real Axis
Imagin
ary
Axis
ARX
ARMAX
OE
BJ
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
1.2Correlation function of residuals. Output y1
lag
-25 -20 -15 -10 -5 0 5 10 15 20 25-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Cross corr. function between input u1 and residuals from output y1
lag
-
Figura 37.
En la Figura 38 se muestra la funcin de correlacin de residuos y la funcin de correlacin cruzada para el
modelo BJ, y se observa que no todos los datos estn dentro del ndice de confianza.
Figura 38.
En la Figura 39 se muestra el modelo de error del modelo ARX, y se encuentra dentro de la zona de confianza.
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
1.2Correlation function of residuals. Output y1
lag
-25 -20 -15 -10 -5 0 5 10 15 20 25-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Cross corr. function between input u1 and residuals from output y1
lag
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
1.2Correlation function of residuals. Output y1
lag
-25 -20 -15 -10 -5 0 5 10 15 20 25-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Cross corr. function between input u1 and residuals from output y1
lag
-
Figura 39.
En la Figura 40 se muestra el modelo de error del modelo ARMAX, y se encuentra dentro de la zona de
confianza.
Figura 40.
En la Figura 41 se muestra el modelo de error del modelo OE, y se encuentra dentro de la zona de confianza.
Am
plit
ude
From u1 to e@y1
10-3
10-2
10-1
100
101
10-5
10-4
10-3
10-2
Phase (
degre
es)
Frequency (rad/s)
10-3
10-2
10-1
100
101
-900
-800
-700
-600
-500
-400
-300
-200
-100
0
Am
plit
ude
From u1 to e@y1
10-3
10-2
10-1
100
101
10-4
10-3
10-2
Phase (
degre
es)
Frequency (rad/s)
10-3
10-2
10-1
100
101
-400
-300
-200
-100
0
100
-
Figura 41.
En la Figura 42 se muestra el modelo de error del modelo BJ, y se encuentra dentro de la zona de confianza.
Figura 42.
Con base en los diagramas de bode y en el mapa de polos y ceros se eligi el modelo ARMAX como el mejor
cuyos ordenes son [2 2 2 1].
0.3538 z - 0.3129
----------------------
z^2 - 1.502 z + 0.5553
Am
plit
ude
From u1 to e@y1
10-4
10-3
10-2
10-1
100
101
10-3
10-2
10-1
Phase (
degre
es)
Frequency (rad/s)
10-4
10-3
10-2
10-1
100
101
-300
-250
-200
-150
-100
-50
0
50
100
Am
plit
ude
From u1 to e@y1
10-3
10-2
10-1
100
101
10-4
10-3
10-2
Phase (
degre
es)
Frequency (rad/s)
10-3
10-2
10-1
100
101
-600
-500
-400
-300
-200
-100
0
100