ID.10532 Atmospheric Dynamics from LIDAR -...
16
ID.10532 Atmospheric Dynamics from LIDAR Gluing Method for Combining Lidar Signals Detected in Analog-to-Digital and Photon Counting Modes Bing-Yi Liu*, Chang-Zhong Feng, Jin-Tao Liu, Song-Hua Wu, Zhi-Shen Liu Ocean Remote Sensing Institute, Ocean University of China
Transcript of ID.10532 Atmospheric Dynamics from LIDAR -...

ID.10532 Atmospheric Dynamics from LIDAR
Gluing Method for Combining Lidar Signals Detected in Analog-to-Digital and Photon Counting Modes
Bing-Yi Liu*, Chang-Zhong Feng, Jin-Tao Liu, Song-Hua Wu, Zhi-Shen Liu Ocean Remote Sensing Institute, Ocean University of China

Project Objectives We will provide an independent and credible measurement of radial wind speed, wind profile, 3D wind vector, aerosol backscatter coefficient, aerosol extinction coefficient, extinction-to-backscatter ratio (limited in the atmospheric boundary layer and troposphere), sea surface wind vectors using the direct-detect Doppler wind lidar / HSRL (High Spectral Resolution Lidar) with an iodine filter during ADM-Aeolus overpass ground-based lidar site (N 36.04, E 120.20). In addition to the lidar observations, wind profiles and other relevant meteorological data from radiosonde could also be provided. These results can be compared with the data products of ADM-Aeolus, and we will analyze the comparison results and present assessment reports to ESA.

Background
• For a ground-based lidar system, the backscattered light usually has large dynamic range.
• Photon-counting mode is used to measure weak signal from high altitude with high sensitivity.
• Analog-to-Digital mode is used to measure strong signal at low altitude with good linearity.

4
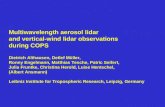
Gluing Photon Counting and Analog-to-Digital data
0 1 2 3 4 5 6 7 8 9 1010
-2
10-1
100
101
102
103
Height (km)
Phot
on C
ount
s
Measurement ADReference ADMeasurement PCReference PCMeasurement GluedReference Glued

5
Gluing principle
PC data
AD data
Glue Glued Data
The gluing coefficient is calculated from the analog and photon counting signals in a linear range.
2
1( ( ) ( log( ) )) min
n
i ii
PC z a Ana z b=
− + =∑

Previous data gluing method
• Analog-to-digital data and photon counting data of atmospheric return signal are merged.
• The gluing coefficient is calculated from the signals in the linear area.
Linear area 2
1( ( ) ( log( ) )) min
n
i ii
PC z a Ana z b=
− + =∑
Problem: Retrieved wind speed is highly sensitive to the merging coefficient.
Standard gluing method used by Licel

Doppler wind lidar based on iodine filter

Wind Error caused by data gluing
激光雷达(2011年3月22日8时15分52秒)
Large wind error this height

9
2 22
0 0[ ( ) ]
m m
i i ii i
E E S x y= =
= ∑ = ∑ −
22 2 2 2( )S x a x b x c= + +
Scatterplot of PC data and AD data
2 21
0 0[ ( ) ]
m m
i i ii i
E E S x y= =
= ∑ = ∑ −
1 1 1( )S x a x b= +
Non-linear relationship is obtained from a binomial regression
Methodology
Data Density
Linear relationship is obtained from a linear regression

10
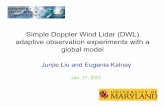
Determine the linear region of AD and PC data
The linear region is determined from both the standard deviation of the binned data and the relative standard deviation.
Fig. 3. Analysis of PC and AD data showing the amount of data pairs, mean, standard deviation and relative deviation in corresponding bin of photon counts from top to bottom.
0 50 100 150 200 250 300 350 400 450 500100102104106
Am
ount
0 50 100 150 200 250 300 350 400 450 5000123 x 105
Mea
n
0 50 100 150 200 250 300 350 400 450 5000
2000400060008000
SD
0 50 100 150 200 250 300 350 400 450 5000123
Photon counts (a.u.)
RSD
Methodology
The derivative of the binomial regression curve at 0 should be equal to the slope of linear regression.

11
Original AD SAD Original PC SPC
Scatterplot
Binomial Regression S2
Linear Regression S1
S’AD (in PC unit) S’PC (corrected)
Weighting Function
Glued Signal
Linear fiting Curve fiting
Flow chart of gluing PC data and AD data
(1 )Glued PC ADS W S WS′ ′= − +
min
minmin max
max min
max
0,( )
, ( )
1,( )
PC
PCPC
PC
S CS CW C S CC C
S C
′ ≤ ′ − ′= < < − ′ ≥
Methodology

12
Wavelength 532 nm
Reputation rates 100 Hz
Pulse energy 0.12J
Pulse duration 10ns
Linewidth 100MHz
Spectrum purity > 99.9%
Analog-to-Digital converters 400MHz 14bit
Photon counters 200MHz
A shipborne Doppler lidar system developed by Ocean University of China (OUC) is used to acquire data for testing the proposed gluing method.
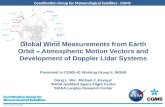
Results

0 200 400 600
1
2
3
4
5
6
7
Photon counts (a.u.)
Hei
ght (
km)
GluedADPC
Hei
ght (
km)
00
0 200 400 6000.6
0.7
0.8
0.9
1
Photon counts (a.u.)
Hei
ght (
km)
Hi
ht (k
)
8 10 12 14 164
4.1
4.2
4.3
4.4
4.5
Photon counts (a.u.)
Hei
ght (
km)
0 50 100 1505
5.5
6
6.5
7
Photon counts (a.u.)
Hei
ght (
km)
100 150 2001.3
1.35
1.4
1.45
1.5
1.55
1.6
Photon counts (a.u.)
Hei
ght (
km)
6

Deviation of AD and PC data compared to the glued data

Conclusions
• Gluing method causes wind error. • Accuracy of gluing is influenced by:
– data source for regression – linear region to calculate the slope of linear regression – average method (weighted or not) – cloud layer
• Lidar signals are analyzed using the optimized gluing method and show good results.

Thank you for your attention!