[,i• Active Analog Telemetry Sent Directly To DSPSE Spacecraft Controller Naval Research...
111
Transcript of [,i• Active Analog Telemetry Sent Directly To DSPSE Spacecraft Controller Naval Research...


[,i I
Space Vehicle ... ,.
. -�· �-�/ ... . .>.
,.:
Experiments. · . .. .
. , . . ' �-
�'
. i.
. ..
I , r

·-.;-< -� J.'t I. ·I "'
{ - I
,(/ 1
\..
�. '
·. :: (,··:
.
. . : f� � :.�j ,t";' .... �· �: �. ' , 'I .;

..!:.._1_
Experi-me-nts
• Dosimeters
- Measure DSPSE Total Dose.Radiation Environment
• Charged Particle Telescope (CPT)
- Measure Energy Levels Of Particles In Five Bins
- Discriminates Between Electron & Protons Based On Energy Level
• Interstage Radiation Experiments
- Includes Dosimeters, CPT, & A Device Under Test (DUT) Package
• Autonomous Navigation Experiments
Naval Research Laboratory
CDAIEXP-2 Washington, DC 20375-5000

Dosimeters
Naval Research Laboratory Washington, DC 20375-5000

Dosimeter
Requirements;
• Locations Close To Sensitive Payloads
• Optional Radiation Sensor Shields
Impact To Spacecraft:
• LowWeight
• LowPower
• Small Package Size
Naval Research Laboratory
CDR/EXP-4 Washington, DC 20375-5000

Implementation
• Use Four Dosimeters For Total Dose Measurement
- One Shielded Sensor At Solid State Recorder
- Three Unshielded Sensors At:
-- Solid State Recorder
•• Sensor Optical Bench
Startracker
• NRL Hybrid Dosimeter Design
- 20 To 25 Grams (0.051bs) Each
- Each Package :::= 20 To 24 cm2 (3.2 in2 To 3. 7 in2)
• Power From PCDU Power Supply
- 30 mW Maximum Per Dosimeter
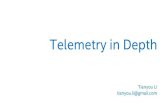
• Active Analog Telemetry Sent Directly To DSPSE Spacecraft Controller
Naval Research Laboratory
CDRIEXP-5 Washington, DC 20375-5000

Dosimeter Block Diagram
PCDE Read.(.)
Critical __ rON-....., --t--- --••
Bus 7 -
Dosimeter #1
TLM
-
Dosimeter #2
.--------. rQ � PCDE � ���.��---���+-� ..__ Power �-12v
Supply� TLM
CDR/EXP-6
•
Dosimeter #3
TLM
Dosimeter #4
TLM - Shielded
....
.... ...
.... -
.... ....
DSPSE Spacecraft Controller
EXP-02
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-7
Theory Of Operation
• Two Modes Of Operation
- Expose Mode
Sensor Source Is Grounded, Sensor Gate Forced To SV
Radiation Creates Hole-Electron Pairs
Holes Trapped In P Channel Sensor By Reverse E Field
-- Read Mode
Sensor Placed In A Defined Constant Current Circuit
Gate Voltage Decreases To Overcome Radiation E Field
Monitor Vgs To Determine Radiation
• A Shield Allows For A Differential Measurement Of The Radiation Environment To Determine Radiation Spectrum
. .
Naval Research Laboratory Washington, DC 20375-5000
I '
( '
I I
)
/ I

Dosimeter Status
• Design Qualified On Other NRL Space Program
• Parts On Hand At NRL Or Readily Available
• Awaiting Authorization To Proceed From SDIO
Naval Research Laboratory
CDRIEXP-15 Washington, DC 20375-5000

(\
Dosimeter Schedule
I . . . .
Activity Name j ...... /���� . .'�.� ..... J ........ .!?�� . .'�� ........ J..T ...... ,��� • .'���······.l ..... ¥.���.:���······J ..... , ... �T.�.:�y� ..... , ... I... ...... �P.� .. :�� ........ L.. ...... ���.:�� ...... .J. ... ¥ ... ��� .. :?.� .... y . .1.., ...... �.�!.�� ......... L.f.:�� .. :�� .. . I 1! 8 1 5j22j29j6 11 3J20j27, 3 1 0j17j24j3 1j 7 j14,21128j 7 14j21j28j4 j1 1j1 8j25l 2j 9 j16j23j3 0j6 jt3j20j27j4 jttj1 8j25j 1 I 8 j1 5
Order 1 I I 1 1 1 1 ' ' 1 I j I · I i 1 I I I I I I i I ' i I I i I 1 ! i i I i i I 1 i j g.�:!i'·H;�rid''""l"''nll ... ,.: ... f.-j ..... j ...... j ..... j ...... H'J''"" ..... 1!.. ..... 11 ...... ..... -1--.... l! ...... j ...... ;l! ...... , .... ..l. ..... jl ...... ,l ...... jl ...... ll: ...... ,!...+ .. ++·+ .. ,! ............ , ..... J ... +·+ .. .j.. ..... ll ....... , ..... '""'f"+ .... l .. .. Parts • · · · · I I I 1 I I I 1 1 I I I 1 1 1 ! 1 1 • !
'tivt;·;·i(j"'Givout"·j ...... r11• ... , .. j .. ·1· .... + ... + ... + .. j .. ...... , ..... T .... . ..... 1 ..... T ..... , ...... r ... T ..... , ...... t ...... l ...... ..... l ..... ,, ...... , ..... l ..... , ...... 1 ....... , ...... 1
...... i" .... l" ....
l ...... t" ....
l ...... l ...... r .... l ...... t ...... , ...... l ...... r .... l ...... i .... ..
i 'I I! . I I I i j I i I ' i ! I l I . I I ., i i I ! i i i ! ! ! I I I I : : I I • : • ! I : I ; • : I I ! : : . : I : : : 'ti'Ybrid ....................... r ..... i .... , ...... r ..... i ...... j ...... r ... ·E5·r· .. · ...... i"' ... I ...... , ...... r .. i ..... l ..... r .... i ...... l .... "t' ..... i ...... ! ...... r ..... j' ..... l ...... ! ...... l ...... l ...... , ..... T .... l .... T ..... r .. ··r .... I .... T ..... , ...... r .... r ... r····r .. ···
.�.�.�.��.�.��.�� .......... 1' .... ..1 . ... L .... 1' ....... L .. J.. .... t ...... l ...... l ..... ,!.. .... j ...... j ..... .l ...... ! ...... L. ... l... ... � ...... l. ..... l.. .... l ...... t ...... !... ... l ...... l ...... j ...... t ...... I ..... .I.. .... ! .... J ...... I ...... t ...... 11 ...... i.. .... 1' ...... i.. .... t! ...... 1.. .... 1... ... 1.. .... 11 ...... 1.. .. .. H b ld B lid I • I ! . I I I I i i I I I I I i I I I ' I I ' • I I I I I I ' Y r u ; I . I 1 I 1 I 2 l 3 I 4 I s I 6 I 1 I a I 9 I 1o:l. 1 i 1 • ! ! ! I i I I I . . . . . . . I • • • • • • • • • • • I • I i I I ! I I I I I I ........................................ j ...... y . ... , ...... , ...... ...... , ...... j. ...... ...... l ...... t ...... , ...... j ...... t ...... , ...... t-.... -} ...... l ...... j. ...... , ...... l ...... j. ...... , ...... j ...... � ...... , ...... t ...... , ...... j ...... � ...... , ...... , ..... + ..... , ...... j ....... , ...... ! ...... j. ...... , ...... , ...... i' ...... j ...... ; .... .. Hybrid Test • I 1 I 1 1 I I I I • • • • I • • • • • • • • • • • • • • I I
j i ! ! . ! I I I t I 2 I 3 I 4 I s . I' e. f i l 8 ·1 'g I .t o. I i i I ! I i 1·
! i I I I I I I I I I I I , ..... + . . I I I • • • : : • • I I . . . . I ' I I ' I I I ·oc;·&'im'8'8' ............. T ...... r .... I" ... T ..... i ...... r .... r .. T .......... r .... ..... l .... T ..... PS .... li·;: .. i ... ri·r .. i'�' ... il .. il ..... (i]f ..... t� ... !·i ..... fcr;i .... llti .... l ..... l' .... l ...... , ...... t ..... T .... T ..... I ...... , ....... I"' ... I ...... , .... .. ��.��i�·ater ............. 'l' ..... t, · ··1 .. -r . .. ... 1 .... -r .... l ...... -·j .... I .... T .... i .... · t· .... f� .. �� ... � .. -·tt� ·I;;J ..... l-;.;�-"! .. �t .. ·;·�l;·�·� .. ·!·;·;� .. ·�;; .. ;1 .. ;+·;1
1······1······t······!······i······t······l······l······
Test ! . : I , i 1 1 i I i ! i ! 1 • 1 • I 1 1 .!. 1 , , 1 .!. .1. + + . , l I I i i l i g·:�i:�te, .............. , ..... ,. ···�······r·····t······r····· i······�······r·····i······,······r·····,······r·····r·····r·····r·· .. ·r·····�···u··,······r ···ij······r ·····�······l······�······!······l·u···i······� ··u··l······r···u··,······l····ut······l······{·······l ······l······t···· ··l······l······
na<Uatio·n .. ;'ostr·T · l .... r+ ... rT ... ..... r·r .. r·rr ... l-.. r, .... , ...... r .. + ... , ...... rr-rt .. T-T .... , ..... , ... Tr··! ..... l" ... l ... T ... j .. t ... � ..... ;.i· .. l·· ... r ... r ... r ... .. ......... ............................. .l ..... .l. ... 1.. .... 1' ...... 1· ...... l' ...... t ............ j ...... t ...... i ...... l ...... t ...... I ...... L. ... l.. .... l ...... t ...... ! ...... l ...... � ...... i.. .... ; ...... l. .... .l. ..... t ..... . l... ... � ...... 6 ...... , ...... 1 ...... 1 ..... .i ..... .i .... ..l ...... l ...... t ...... , ...... !... .. .1 ..... .!. ..... !.. ... . Shield Fab ! ! I 1 "'' • ' ' •
• 1 i i i 1 i i i i 1 i i T ! ! ! ! I I I !1 I !
CDR/EXP-14
! i i ! I i I . : i i ! I I • : I i ! ! I i . I ! ! ! : . I i . . . . I • ' ' ' ' I ' ' ! ! ' ! ! ! ! ! l l I I I i ! I ! ! I l I I i i
Naval Research Laboratory Washington, DC 20375-5000

_j_ .5 Inches
CDRIEXP-13
Dosimeter Packaging
Strain Relief
Hybrid Chip
Sensor
..... �-------- 2.1 Inches -----------1 ....
(5.3 em) Doslmelers Packaging
Naval Research Laboratory Washinglon, DC 20375-5000
.. /

®
STRAIN
RELIEF ®
r-
CDR!EXP-12
Layout
I
0
---n=:J-
-i l-I I
HYBRID CHIP
I I I 1- -c=J-I -c=J-1-2.1 Inches (5.3 em)
® ®
® ®
�I
1.51nches (3.8 em)
SHIELD
EXP-05
Naval Research Laboratory Washington, DC 20375-5000

Hybrid Parts List
Part Name Type Value
1N5711 Diode ...
HS-3530-RH-6 OpAmp ...
WCTR-100-123008 Res1stor 1.23Kn. 0.1 °/o
WCTR-1 00-243008 Resistor 2.43KQ, 0.1% WCTR-1 00-549008 Resistor 5.49KQ, 0.1 °/o
WCTR-1 00-649008 Resistor 6.49KQ, 0.1 °/o
WCTR-1 00·1 0501 8 Resistor 1 0.5KQ, 0.1 °/o
WCTR-1 00-137018 Resistor 13.7K.Q, 0.1 °/o
WCTR-100-174018 Resistor 17 .4K.Q, 0.1 °/o
WCTR-1 00·24301 8 Resistor 24.3KQ, 0.1 °/o
WCTR-1 00-30901 8 Resistor 30.9KQ, 0.1 °/o
WCTR-1 00-51001 B Resistor 51.0KQ, 0.1 o/o
WCTR-1 00-412028 Resistor 412KQ, 1o/o WCTR-1 00·620028 Resistor 620KQ, 0.1 °/o
... Case . ..
t::XP-08'«
CDR/EXP-11
Quantity Shield No Shield
2 2 1 1 1 1 1 2
...
2 1 5 1 2 1
2 2 1 2
---2
---...
1 3 1 5 1 2 1
Naval Research Laboratory Washington, DC 20375-5000

Hybrid Schematic
PIN 14 PIN 13
PIN 2
51KQ
PIN 1
620KQ
24.3KQ
2.43KQ · +12V
PIN 10
PINS
6.49KQ PIN7
17.4KO
PIN 6
CDR/EXP-10
PIN 12
GATE
PINS
DRAIN
PIN3
412KQ
PIN 4
+12V
PIN 11 PIN 9
Dosimeter Telemetry
620KO EXP-04
Naval Research Laboratory Washington, DC 20375-5000

Part Name
CKR06BX1 05KS CKR05BX683KS
JANTX1 N759A
RCR05G101JS
RCR05G1 OOJS
RNC55HXXXXBS
RNC55HXXXXBS
AG-SC-501 O-S
M38527/02-039
M22759/11·22-9 ...
··-
79 LH1660-40
MS24693-25
NAS620C4 t:X.t-'-0/ 'It
CDR/EXP-9
Dosimeter Parts List
Type Value
Capacitor 1.0 �-tF Capacitor 0.068 �-tF
Zener Diode 12V, 400 mW
Resistor 1 00 n, 5°lo, 0.125W
Resistor 10 .n, 5°lo, 0.125W
Resistor TBD, 0.1 °k, 0.1 oow
Resistor TBD, 0.1 o/o, 0.1 OOW
Sensor P Channel Mosfet
Mounting Pad ---
Wire 22 AWG
Shield 160 mils Thick
Hybrid Chip 16 Pin Dip Package
Locking Nut Miniature, Hex, 4-40
Screw 1 002 Flat Head, 4-40
Washer Flat 4-40
Quantity
3 2
1
1
3
1
1
1
1
As Required
Optional
1
4
4
4
Naval Research Laboratory Washington, DC 20375-5000

r
'--
+12V SW
+12V
SENSOR
CDR/EXP-8
Dosimeter Schematic & Interfaces
+12V
Hybrid
+12V SW
10Q +12V SW �+12V Unswitched
J1uF
100 +12V
�
J1uF
+ 12V Switched
100 -12V
� -12VInput
J1uF _
J.r-----<( Signal Ground
Dosimeter Telemetry
EXP-03
Naval Research Laboratory Washington, DC 20375-5000

)
Charged Particle Telescope (CPT)
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-17
Charged Particle Telescope (1 of 2)
Size:
Weight:
Placement:
Power Supply:
Operating Temperature:
Telemetry:
Supplier:
8.0 X 3.0 X 0.97 in
Less Than 0.5 Ibm
Looking Along Same Optical Axis As The Visible Sensors
+12 v, -12 V,
�o.o5 Amps �0.038 Amps �0.75 w
-20° C To + 10° C
1 LTN-11 Thermistor (Supplied By NRL) Temperature Range: -50° To +35° C
Aerospac� Corporation
Naval Research Laboratory Washington, DC 20375-5000

Outputs:
Delivery:
Concerns:
CDRIEXP-18
) /
Charged Particle Telescope (2 of 2)
5 Discrete Pulses:
�June 1993
High Voltage: Outgassing:
/
El: < 20 KeV E2: < 60 KeV E3: < 300 KeV Pl: < lOMeV P2: <30MeV
+300V Requirement To Wait TBD Before Turn On
Naval Research Laboratory Washington, DC 20375-5000

CPT Functional Block Diagram
DISC
DISC
DISC LOGIC
DISC
DISC
+5V GND JSV
Power Supply
CDRIEXP-19
t-+---+12V
GND
rt--- -12V
EXP-01
Naval Research Laboratory Washington, DC 20375-5000

CPT
lf----------6.50 ________ __.
If-------- 6.200----------ol
2.760
.66
t n n n
:u MCK·NI·Y-95661·18.0 8.00
9 Pin Connector
CDRIEXP-20
Mounting Holes .147 0 4 Places
I J
EXP-06
Naval Research Laboratory Washington, DC 20375-5000
CPT
/ \, I
j

•
•
•
•
CDR/EXP-21
CPT Status
CPT In Fabrication At Aerospace
Interface Chip Set Delivered To NRL For Incorporation Into DSC
All Interfaces To Spacecraft Have Been Defined
Thermal Constraints Currently Being Worked With Aerospace
Naval Research Laboratory Washington, DC 20375-5000

Interstage Radiation Experiment

DREP Experiment Subsysten1 Functional Diagram
JPL Experiments
Rate Meter � Timing&
Counter
DRAM � SEU Test
& Timing
DREP4-11132C
EEProm SEU Test
& Timing
FPGA SEU Test
& Timing
MASTER CONTROLLER BUS
Experiments r···························�=�:�················l- ····_ ····!-1 -------1 ... �1Vgs Amplifier & I Dose Meter ... 1
... . Constant -! FET -=······················································· Current Source
: i ! : !
I ...
.Temperature Monitors
AD590 ' - SEU Sensor
... I , ....................................................... .--------,
- : DRAM
I : .... : ... _! -�
I ! � !....,
! ... ..,.! -�
I l : : ! ..... : -
-! - ·
I !
DRAM OUT
EEProm OUT
FPGA OUT
L. .............................................................. ,
.... ... ..... Supply ... ..... Current - Monitor .... ...
.... ... Acquisition .... .. Time __.. Comparator
�ll
-System Clock
I � -
... :... -
..... -
AID Converter I--
Integrator ,.....-
C92-7035
Naval Research Laboratory Washington, DC 20375-5000

DREP Board Outline
4.00"
A SECTION A·A
DREP5-11132C
BOTTOM VIEW
ANTENNAN1
Ci2·703i
Naval Research Laboratory Washington, DC 20375-5000

DREP Asseiiibly
Power Divider
CDRIEXP-39
,
Naval Rescarcli Laboratory Washington, DC 20375-5000

DREP6-11132C
Experiment Parts List'
Part Description QTY MFA Number
MT4C1004 . DRAM, 4 Meg X 1 2 MICRON
CM28HC256 EEPROM, 256K, CMOS 2 SEEQ
ACT1280 FPGA, 8000 Gates, 1.2Jl CMOS 2 ACTEL
CD4007 (Cal. Lot) Dosimeter FET 2 RCA!NRL
TMS4164 SEU Rate Meter DRAM 2 Tl
RADMON RADMON 2 JPL
TBD 4M Bit 3D SRAM 2 OKifTI
TBD Charge Couple Device 2 LORAL
C92-7021
Naval Research Laboratory Washington, DC 20375-5000

•
•
•
•
CDRIEXP-41
I
Interstage Experiment Status
Final Mission Orbit Critical To Performance Of Experiment
Experiment Manifest Dependent On Mass Allocated To Experiment
Preliminary Electrical Design Complete
Preliminary Mechanical Placement Complete
Naval Research Laboratory Washington, DC 20375-5000

Autonomous Navigation Experiments

.;,_ .-
Autonomous Navigation
• Earth-Moon Transfer
• Lunar
• Geographos Transfer
• Terminal
Naval Research Laboratory
CDRIEXP-43 Washington, DC 20375-5000

CDRIEXP-44
DSPSE Earth.:. Moon Auto Estimation Concept
*
Star *
*
Determine the attitude from star tracker
Earth ORB-18
\ I
J
�
Moon
The Unit Vector liTo The Earth Or Lunar Center Is Supplied By The Image Processing S/W & Used As Input To The Kalman Filter To Estimate The Position
Naval Research Laboratory Washington, DC 20375-5000
' \ )

CDRIEXP-45
Autonomous Estimation - Earth To Moon Transfer
• Earth - Moon Transfer Simulations
- Preliminary Results Indicate Errors Between 40 km - 450 km
- After Second Apogee Errors Are Less Than 100 km
• Duty Cycle Is 6 Hours Of Imagery Data - 18 Hours Of No Data
• Use UV /Visible Camera & Star Tracker
- Heavily Dependent On Sensor Accuracies
Naval Research Laboratory Washington, DC 20375-5000

CDRIEXP-46
\ )
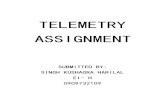
Auto Estimation Performance Of The DSPSE Satellite
In The Earth-Moon Transfer Orbit
500?-------------------------------------------------------�
400
a= 203322 km 9 = 0.967 I .. 70.00deg n ., 80.057 deg ro = 200.793 deg M = 360.0 deg To = 94/01126
04:44:02
Star tracker accuracy: pitch: 300 mrad y aw: 300 mrad
300 roll: 1000 mrad
D
200 D
1 00
D
1st perigee- � a
a
a
Unit vector meas urement s of Earth and lunar center used as input to Kalman Filt er.
Measurement accuracy: 0.1 deg 1-a random
Measurement rate: N every 2 minutes alternating at 1 hour interv als between Earth and Moon cent roid measurements .
Duty cycle : 6 hours on- 18 hours off.
2nd perigee
I
Lunar orbit insertion
error N 27km
I
I
I
oo-----------------�------------------r---------�------� 0 10 20 30
Elapsed llme (days)
Naval Research Laboratory Washington, DC 20375-5000

lnterstage Experiment
• Requirements
• Overview
• Status
Naval Research Laboratory
CDRIEXP-23 Washington, DC 20375-5000

lnterstage Experiment Requirements
• Utilize Interstage Solar Arrays Used To Augment The Spacecraft Arrays During LEO
• Provide A Platform For Selected Radiation Monitoring Experiments After Spacecraft/lnterstage Separation
• Downlink Acquired Radiation Data For Characterization Of Potential SDIO Orbits
• Interstage Add-Ons Weight Critical - Minimize Experiment &
Support Package Mass
• Design For Late Inclusion Into Mission If Mass Margins Exist
Naval Research Laboratory
CDRIEXP-24 Washington, DC 20375-5000
'\
\
)

•
•
•
•
CDR/EXP-25
lnterstage Orbits (1 of 6)
Baseline Mission Orbit Leaves Interstage In An Unusable Orbit
Baseline Orbit Of Interstage Dependent On � V Imparted By Separation Springs
"Stunted" Phasing Loop Being Investigated To Take Full Advantage Of Spacecraft Fuel Capacity & Launch Vehicle Throw Weight Capability
"Stunted" Phasing Loop Orbit Leaves Interstage In An Unusable Orbit Crossing Radiation Belts
Naval Research Laboratory Washington, DC 20375-5000

lnterstage Orbits (2 of 6)
Evolution Of The lnterstage Orbit After Separation From The DSPSE Spacecraft 11 V Imparted To Interstage At Separation = 0 ft/sec (CDR Baseline Orbit):
CDR!EXP-26
. ) " -- /
MOON'S ORBIT
)
Naval Research Laboratory Washington, DC 20375-5000

lnterstage Orbits (1 of 6)
Heliocentric View Of The Interstage (After Earth-Escape) & Inner Planetary Orbits (CDR Baseline Orbit):
CDRIEXP-27
Naval Research Laboratory Washington, DC 20375-5000

lnterstage Orbits (1 of 6)
Evolution Of The Interstage Orbit After Separation From The DSPSE Spacecraft 11 V Imparted To Interstage At Separation = 1 ft/sec (CDR Baseline Orbit):
MOON'S ORBIT
CDRIEXP-28
Naval �esearch Laboratory Washington, DC 20375-5000.

lnterstage Orbits (1 of 6)
Evolution Of The Interstage Orbit After- Separation From The DSPSE Spacecraft !l V Imparted To Interstage At Separation =2ft/sec (CDR Baseline Orbit):
'
CDRIEXP-29
Naval Research Laboratory Washington, DC 20375-5000

lnterstage Orbits (1 of 6)
Evolution Of The Interstage Orbit After Separation From The DSPSE Spacecraft � V Imparted To Interstage At Separation = 3 ft/sec (CDR Baseline Orbit):
CDRIEXP-30
\ __ _ )
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-31
Effect On The lnterstage Orbit Of Va;rious TTl 8 V's
MOON'S ORBIT
EARTH
TTII!J.V
(m/s)
A 2940
8 2960
c 2980
D 3000
E 3020
F 3040
G 3060
H 3080
I 3100
J 3120 t:XP·09
I�TERSTAGE ORBIT
J
Maximum Distance lnterstage
From Earth Orbital Period
(nmi) (days)
71426 2.111
77461 2.372
84567 2.691
93062 3.091
103398 3.602
116253 4.272
132654 5.180
154191 6.453
183435 8.319
224902 11.227
Naval Research Laboratory
Washington, DC 20375-5000

CDRIEXP-32
)
lnterstage Experiment Description
• Experiment Subsystems
• Data Acquisition Subsystem
• Power Management Subsystem
• - Communication Subsystem
Naval Research Laboratory Washington, DC 20375-5000

Interstage
In terstage -------1ill'-- l
Solid l�ocket Mo
CDR/EXP-33
Patch Antenna
Patch Antenna
DSPSE I�adiation
Experi1nent Package (DREP)
l..�aunch Vehicle Adaptor
hllorsla!J!l /ldaplm 1'. I h:kl M
Naval Research Laboratory Washington, DC 20375-5000

Functional Diagram Of DREP System
f;o_w_ER-M - A N -AG-EM-E-NT- - - - I lnF suesvsTE M - - - - - - - - I SUBSVSTEMr--------"-.-----1---J.------,
I
Solar Array
Power
r-:-1 I Devices
Under
I Test
I
Shunt I
I
On/Off Regulator ·I
I 5�H I ±15 Volt
L ________ �
Data Acquisition
I I
I SEU & TO 1--r-�-1-----'
1 II M onitors 1 I
I JPL II I I AC�U���ON IEXP�RIMENTS
I L ������iEN,J _j LSUBSVSTEM
_
j . .• sr
SGLS 5Watt
Transmitter I . PIN CTS-105P
I
I
I
I
Power Divider
P/N 4313·2
Omnl Directional
Antenna 2.2 ·2.3GHz
P/N S65-5366-1S
I ·I I I I
I I I I
I I
Omnl I Directional
I Antenna
I 2.2 • 2.3GHz I · PIN S65·5366-1S
L ___________ _j C92-7020
)
DREP1-11132C Naval Research Laboratory Washington, DC 20375-5000

Data Acquisition Subsystem Functional Diagram
Dosimeter �-�
Total Dose Experiment r-
Ust PROM
Total Dose Analog
Interface
t
Experiments (OUTS)
SEU Experiment
List PROM
Total Dose SEU State .State
Machine Machine (ACTEL 1) t-----...L.------r--1 (ACTEL 1)
Address & Control
SEU Rate
Meter
Rate Meter State
Machine (ACTEL 1)
JPL t-------a.,..B_It_B_u_s
____ --.r--..__-----+-----lExperiments
,
AID � Multiplexer t----1 Converter
. DREP2-11132C
Master PROM
Master State
Machine (ACTEL 1)
Parallel To ·
To � RF Serial Modulator
C92-7022
Naval Research Laboratory Washington, DC 20375-5000

DREP Weight Estimate
: COMPONENT
10" x 4" X .047" Thk PWB
20" X 4" X .047" Thk PWB
4" x 26" x .05" Thick Magnesium Plate
4" x 26" x 1" Magnesium Housing With .05" Thick Walls
15 Pin Connector
Test Components
Splitter
RF Transmitter
All Other Components
Antennas
Coax (20Ft.)
JPL Experiment
25 Pin Connector
Total
DREP3-11132C
WEIGHT
106 Gms
213 Gms
156 Gms
115 Gms
15Gms
99Gms
22Gms
280 Gms
106 Gms
112 Gms
125 Gms
682Gms
20Gms
2051 Gms = 4.52 lbs
C92-7024
Naval Research Laboratory Washington, DC 20375-5000

CDRIEXP-47
I \
Auto Position Estimation Of DSPSE In A Lunar Orbit
* *
Star *
*
Star
Tracker
#2
Determine
attitude !rom star
tracker
Observe lunar limb and compute unit vector u to lunar center. Use as Input
to Kalman Filter to derive position.
UV/Visible Camera
FOV
OIII·ID
Naval Research Laboratory Washington, DC 20375-5000

200
y
100
CDAIEXP-48
. )
Auto Estimation - Lunar Orbit
100
UV/Visible Camera Image of Limb
4.2 x 5.6 Degree FOV
Fit Segment Of , Circle To Light/Dark ..
200
X
\
)
Bound a
300 OAB-22
Naval Research Laboratory Washington, DC 20375-5000

Data Transfer & Autonav
Measurements
CDR!EXP-49
Auto Estimation - Lunar Orbit
Lunar Mapping
ORB-23
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-50
Autonomous Estimation - Lunar Mapping
• Lunar Navigation Simulations
- Preliminary Results Indicate "' 15 km 2cr RSS
Accuracy In Orbit Determination Is Achievable After Approximately One Day Of On board Measurements
- No Systematic Errors Or Dark Side Constraints Considered
- Errors Are On Optimistic Side
- Uses UV/Visible Camera & Star Tracker
- Heavily Dependent On Sensor Accuracies
Naval Research Laboratory Washington, DC 20375-5000

COR/EXP-51
Auto Estimation Performance Of The DSPSE
Satellite In A Lunar Orbit
E' �
...
E ...
UJ en en a:
80�------------------------------------------------------�
60
40
Iii
20
a =3454 km e = 0.379 i = 90 deg
ro= 150 deg
Measurement accuracy: 0.1 degrees 1-cr random
Measurement rate: .... every 30 seconds
Meas included when: True Anomaly between 1 oo and 180 degrees and when SIC out of lunar shadow
Unit vector measurements of lunar center used as input to Kalman Filter.
Star tracker accuracy: pitch: 300 mrad yaw: 300 mrad roll: 1000 mrad
/2cr ASS error: - 15 km
Elapsed Time (days) ORB·I3
Naval Research Laboratory Washington, DC 20375-5000

CDRIEXP-52
Auto Estimation Concept During Earth-Geographos Transfer
Geographos
* * * Stars
*
/����� lne
DSPSE om
star
direction ,.,
.
tracker
of � , �
Observe Earth and lunar / \ limb. Compute unit vector to center. Use as Input to Moon
Kalman filter to derive DSPSE position .
• ORB-15
Naval Research Laboratory Washington, DC 20375-5000

CDRIEXP-53
Autonomous Estimation- Earth Geographos Transfer
• Preliminary Results
• Four Image Reductions Per Hour Used
• Earth-Geographos Transfer
- Preliminary Results Indicate Poor Dynamics
RSS Errors Several Thousand km
- Error Degrades From A-Priori Uploaded State; Must Alternatively Image Earth & Moon. Earth Measurements Alone Are Not Adequate.
- Results Indicate That It May Be Best To Use Latest State Vector & Propagate Onboard
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-54
E ......... .... g
w c 0
+:::
"Ci) 0
a..
� c:::
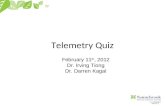
, Auto Navigation Performance During Earth-Geographos Transfer
15000�------------------------------------------------�
10000
5000
Four Earth or Moon center Measurements each hour
Switch between Earth and Moon every 4 hours
No measurements when the Sun is 20 degrees of the
UVNisible camera boresite.
One Sigma Accuracy of Unit Vector Measurements: 0.05 deg
Iii
Star tracker accuracy: pitch: 300 mrad yaw: 300 mrad roll: 1000 mrad
NoMeasl due to
Sun Blinding '
Rendezvous with Geographos
0+-----------��-----------r------------�----------� 100 200 300
Day of Year (1994) ORB-14
Naval Research Laboratory Washington, DC 20375-5000
"--·

Auto Estimation - Terminal Phase
Goographos
� Sun
/ 100 km
/
Measure Included Angles Between Geographos & Several Bright Stars
Due To Bright Sun Near FOV May Not Be Able To Image Geographos & Nearby Stars Within Same Sensor Image
Cannot Determine Full Relative State Vector From Angle-Only Measurements. Consider Fact That Velocity Vector Is Well Known, i.e., 10.8 km/sec. Then Solve For The Relative Position Vector.
Zero-Gravity Dynamics Applicable During Terminal Phase.
CDRIEXP-55
*
Determine ---.attitude from
star tracker
* ORB-Ill
Star tracker accuracy: pitch: 300 mrad yaw: 300 mrad roll: 1000 mrad
* * Stars
* *
Naval Research Laboratory Washington, DC 20375-5000

CDRIEXP-56
Autonomous Estimation - Terminal Encounter
• Terminal Navigation Simulations
- Miss Point Determined 30 Minutes Prior To Encounter
- Preliminary Results Indicate RSS Relative Along-Track Position Accuracy (Between Spacecraft
, & Asteroid) Improves Rapidly Only Within Last Minute Before Encounter
• Prior To 1 Minute Intrack Error Is Approximately 15-25 km
Last Minute lntrack Error Is Between 1-4 km
- Heavily Dependent On Sensor Accuracies
Naval Research Laboratory
Washington, DC 20375-5000

CDRIEXP-57
Auto Estimation Along-Track Perfortnance During Geographos Terminal Encounter
E � .... 0 .... ...
w
c:
� 'iii 0
a.. �
� ....
1-0> c: 0
<
60
Geographos LOS unit vector meas error = 0.057 deg
Star tracker accuracy: pitch: 300 mrad
40 yaw: 300 mrad roll: 1 000 mrad
Encounter @ 0 min
20
0
-20
-40+---��r-�---.--�--.---�--.---�-.--�---.--�--� -1 0 -8 -6 -4 -2 0 2 4
Time to Encounter (minutes) OR&t2
Naval Research Laboratory Washington, DC 20375-5000

Auto Estimation B-Plane Miss-Distance Performance During Geographos Terminal Encounter
40
30 -
E � .......
...
e ...
w
c 0
-..:::
·u; 0
20 a.
(/} C/} a:
Q)
ffi a..
I
m
10
CDRIEXP-5B
Geographos LOS unit vector meas error= 0.057 deg
Star tracker accuracy: pitch: 300 mrad yaw: 300 mrad roll: 1 000 mrad
Iii
Time (min)
Encounter @ 0 min
Naval Research Laboratory Washington, DC 20375-5000

CDR/EXP-59
-24
UV/Vis & LIDAR Receiver LOS & FOV
I
l + o MAGS
Line of Sight From Spacecraft To Geographos 24 Hours Prior To Flyby
I I I I
I ',1 l '�I l I I ! : ' + I !A I A ,. I ! +! • • A ' P 1 UV/VIs ><x 0 MAG 8 : ll I . "' I : I �
·25 • ,...........
o MAG 7 ......... � 1 ........................... ,1 ............. r ............ ! ................. 6 ........ 1 .............. � .......... l·: .......... :�-......... 'j' ............. 'l'7, r- Field Of VIew
j [J j I ! 0 I 1 r !o 1 I !
·26 •
X MAGS : : : + : . : : I j + 0 ! A i I . . ! I ' .
: ::::. ;····� 1---�� ·····�--·1- -· ·· -· ··-· (HiR�� ·j······-:· ·-+· �--· +·L .... �-'
li I I + x I Field OfiView I + i \ ' • I )0(\._j : ' )<
-27 • .. ...................... !, .. � .. -� . •• : f----�---1· ··-· ··-.1- ·-···�· .. _ •. :.t� ··-·-4-· ·-·· ···�-' + . . I A • I I i X ! l I I !I' A :
II AA 1 ! ! ! o! I ! 4 j X ! X ! j A I '+ ' ' A ' ' " A I f Xj A Aj I i L I -: •28 • � ..... :x ...... !11.�.l ................ + ...... r·� .............. t .. Ja .................... 4 ......... �� ...... � .. � .. 1b: ......... � ........... +r .. = .. �-� ........... t .............. ....... ..
11 i + 1 A j X + I + ! + I I IY,
·29
138
Notes:
i l i i j i X l A A , : ' ' I : : 1 I I l I I I I
139 140 141
I 142
Right Ascension (Degrees)
143 144 145 146
O&T-G29
MAG 5 Is From 5.0 To 5.9, Etc. Geographos Is Not To Scale Based On Baseline Trajectories Naval Research Laboratory
Washington, DC 20375-5000

•
•
CDRIEXP-60
I
LJ
Terminal Navigation & Pointing Plans
Preliminary Results From NRL, LLNL, & JPL Indicate That Terminal Navigation & Pointing Is Feasible
I
NRL Is Currently Working With LLNL & JPL To Develop An Integrated Plan To Perform This Phase
Naval Research Laboratory Washington, DC 20375-5000
\ __
-'

' !
RadMon/CMOS Experiment
I ) ' '
\ /

RadMon/CMOS Experiment (1 of 2)
Size: 4"x4"xl"
Weight: Less Than 2lbs
Placement: Top Of Spacecraft,. Above Optical Axis Of Visible Sensors
Power Supply: +5, ±12 Volts ,< 100 mW
Operating Temp: -20 To +60oC
Telemetry: Serial Telemetry
Co1nmands: Serial Commands
Supplier: JPL
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment (2 of 2)
Data Outputs:
Delivery:
• RadMon
- SEU Of Static RAM
-- Proton, Alpha, Heavy
- Total Dose Of pFET
• CMOS
- SEU Of Latch·
- Total Dose Of CMOS Inverters
Brass board
Flight
Feb93
May93
Naval Research Laboratory Washington,J?C 20375-5000

Serial CMD
Serial TLM
+5, ±15V
RadMon/CMOS Experiment Block Diagram·
ISB Interface
Buffer ·
FPGA Vo
R ID
op-amp
VG
CMOS SEU
Latch
OUT
CMOS. SEU
SRAM
RADMON
CMOS Total Dose
pMOSFET
EXP-R1
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment Box Outline
'•
z
x�Y
6-MIL
ALUMINUM
SHIELD "Y"
'• ·.
·. 4" ......
SHIELD"Z"
,• ·......... .,�� SHIELD "Y" ·, : ,· SHIELD "X"
............... '
6 MIL ALUMINUM SHIELD
ALUMINUM FRAME
,• �� ,' 4 ..
I I
. -.J �� ,,
CONNECTOR
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment - RadMo11 Description
• Objective
- To Profile The Earth's Proton Belts, To Measure The Total Dose & To Compare Results With Ground Based Measurements In Order To Understand The Effects Of Radiation On Electronic Components, To Aid In The Design Of Robust Space Systems, & To Update The Radiation Models.
• Approach
- The RadMon Consists Of A Chip Set That Is Fabricated From A Standard CMOS Processes So That Single Event Upset (SEU) & Total Dose Results Are Directly Applicable To Upsets & Total Dose Shifts In Integrated Circuits Fabricated Using The Saine Process. That Is, The SEU Charge Collection Lengths Are A Few lO's Of Micrometers & The Total Dose S�nsitive Oxides Have The Same Radiation Response As The Associated Integrated Circuits. The Chip Consists Of A Specially-Designed Static Randont Access Me1nory (SRAM) With An Adjustable SEU Sensitivity &
(Field-Effect Transistors) FETs For Total Dose Measurements. The DUT Experiments Will Utilize The RADMOM FET Dosimeter To Measure Total Dose & The RADMON SRAM To Measure Proton Fluence
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment - RadMon Block Diagram
OUTER BOARD MIDDLE BOARD ' .
10 VDD Vo rll2?1-
. 1 ___,--t--t-r--t--t SEU /SRAM
D
� 4 E · w R ..
GND --+-t-t-t
INNER· BOARD
1/0
R6
TEMPERATURE MONITOR AD590 CLOSE TO OUTs
· Naval Research Laboratory · Washington, DC 20375-5000

RadMon/CMOS Experiment - RadMon pFet Curve
2.0
,.....
� 1.9
>n. w 1.8 "'
� :......J 0 1.7 > 0 _J 0 :c 1.6 (/) w 0:::: ::r: t-
� 1.5
(/) 0 � 1.4
CRRES pFET THRESHOLD vs SRD DOSE
pMOSFET A300VP32 W/L = 6/3 p.m/ p.m NO TEMP CORRECTION Vf 0 = 22.3 mV /krad .
vr0 = 0.55 v
D pMOSFEf
- PHILLPS LAB SRD DOME N0.1
D
60 ..........
0 en -'"0
55 � ..::£ -
0
sow .en 0 0 _J
� 45o t-0 0:::: en
40
��������������������� 35 500 550 600
CRRES ORBIT NUMBER
650 700
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment - Ground Test Upset Rates
1000
(/) --' --' w u
0 w
100 ()_ ()_ --' LL.
0
0 z
10
1
SPONTANEOUS
LL-MSX DATA (N06J) VDD = 5 V
1.0 MeV PROTON
0.55 MeV PROTON
2.0 2.5
OFFSET VOLTAGE, V0 (V)
.. 3.0
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment - CMOS DUT Description (1 of 2)
• Introduction
- · The Bull{ Of The Spacecraft Electronics Is Composed Of Digital Electronics Consisting. Of Microprocessors & The Associated Glue Logic Which Is Typically Designed In CMOS Gate Arrays. Such Circuits Are Vulnerable To Reliability Failures From Metal Electromigration, Hot Carriers, & Oxide Breakdown & Radiation Failures Fro1n Single-Event Upsets & Total Dose. The Susceptibility Of CMOS Parts To Failures Varies Considerably From Manufacturer To Manufacturer & The US Government Has Established An Innovative Approach, Called Qualified Manufacturing Lines (QML), To Assist System Builders In Obtaining High Quality Digital Parts. The Spacecraft Electronics Is Not Only
. Subject To Radiation Effects But Also To Considerate Temperature Variations Which Can Degrade The Perfor1nance Of The Electronics Or Cause Catastrophic Failure
• Objective
- This Digital CMOS Dut Experiment Is Designed To Characterize The Reliability & Radiation Failures Of A CMOSE Test Coupon By Measuring Reliability & Radiation Parameter Variability In Space. In A Follow-On Effort, The Space Results Will Be Compared To Ground Radiation &
Reliability Acceptance Tests ·
Naval Research Laboratory Washington, DC 20375-5000

... - - -- .
RadMon/CMOS Experiment - CMOS DUT Description (2 of 2)
• Approach
- · A Reliability & Radiation Effects Test Coupon Has Been Developed Recently For The Honeywell RICMOS-111 1.2 J.Lm CMOS Gate Array . Process. The Test Coupon Has Over Thirty Test Structures. We Will Examine This Coupon For Suitability For A Flight Experiment & If Necessary, Will Modify & Refabricate a Flight Version
Naval Research Laboratory
Washington, DC 20375-5000

RadMon/CMOS Experiment - CMOS Dot Diagram (1 of 3)
L..Q3
L.Q2
LQ1
LD1D3
l..D002
LVO
VSS:HB
LE
VDD:148
WD:14A
lRO
LR1
lR2
LR3
INVL2802.PLT
TOP
IRO
IR1
IR2
liN
lOUT
IC2
IC1
VS5:14A
BOTfOM
I�
IC2 IC1 ICO
T l I T l I T J ·
WD ·£ VSS
8X8 INVERTER ARRAY
E 'W
. � 1ll .._.
-
""" -
.. -.... -
�� R1 AQ
m -
0
SEU 1 BX4- LATCH
§ -
0 rrJ -:;o
-
....._-
103 1 D DOOZ
ARRAY
I ll·l L:::;
IRO
Naval Research Laboratory Washington, DC 20375-5000

RadMon/CMOS Experiment - CMOS Dut Diagram (2 of 3)
DIDl WD
R3 ftZ : R1 • RO
DECODER CELL
SEU LATCH ARRAY
Naval Research Laboratory . Washington, DC 20375-5000

---- �--
RadMon/CMOS Experiment - CMOS Dot Diagram (3 of 3)
0:: w 0 0
IR2 u w
IR1 0
IRO 3 3; 0 0::
CD -� .. co..
t')
WD
VDD
COL _-4t � ca..
.3:8 COLUMN DECODER
3
IC2 IC1 ICO
VDD T l((fll
T . iiOW
Naval Research Laboratory Washington, DC 20375-5000

Flight Software
Naval Research Laboratory Washington, DC 20375-5000

Flight Software CDR Outline
• Organization
• Software/Hardware Architecture
• Software Requirements Summary
• Software Development Approach
• Guidance, Navigation, & Control (GN&C)
• GN&C Image Processing
• Command & Telemetry
• Resource Manager
• Performance Analysis
• Software I&T
• Schedules
• Configuration Management
• Documentation
CDRJFS-2 Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-3
Flight Software Organization Chart
DSPSE Program Manager
P.Regeon
Software Systems
W. Mall
Electrical Systems Manager
M.Johnson
Software Systems
D. Schriftman I C. Wildermann
Flight Software Project En!Uneer
D. Oswald
I GNC Image Processing Guidance Navifation
&Contro Command & Telemetry
D. Sackett (LLNL) B. Stapleford J. Van Gaasbeck
1- R. Wagner 1-- E. Andrews
I- D. Entwistle "-- c.Zuror
I- T.Defmo 1- R. Dixon
Configuration Management
M.Mardis
l Resource Manager
M.Adams
1- D.Dyer
� J. Boyce � P. Sargeant
IFS-31
Naval Research Laboratory Washington, DC 20375-5000

·- '-
CDRJFS-4
CT&DH Internal & External Interfaces
TRANSPONDER AX DATA
TRANSPONDER AX DATA :
sc
TLM
CTDH·37
Naval Research Laboratory Washington, DC 20375-5000

Flight Software/Hardware Interfaces
Sensors ...... ��----.-..� Data
Handling Unit
Solid State Data
Recorder
Jl SSR Bus
- -.... ..
Video/SASI Bus
' Sensor House
Interface Keeping Processor Processor (R3000) (1750A) ,. f � �
·r SIC Bus ·r Jl
Global Memory
l
r
,----- ...... , , , , , , , , , , , , , , , , , , , r , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , • , , , , , , , • , , • • , • , • • • , , , •
• , ' r , : '
Command Receiver
r ' ' , ' ' ...---'-----, ' '
SIC Command
' ' ' '
: : SIC ByPass IMU : : ' ' Telemetry Telemetry 1/F : : ' ' ' ' ' ' �----� ' ' ' '
,,
ACSIRCS 1/F
r
Paraffin 1/F
' ' : • Uplink Commands • Discrete • Analog •DownlinkTM • Attitude Inc. ' ' '
• Velocity Inc. , , • Thruster • Valves
• Solar Arrays : • Low Level • Serial • Differential
, Command Module ' - - - - - - - - - - - - - - - - - - - - - - - - - - - �
CDRJFS-5
• Discrete • Serial ' • Differential • Proton
' ' ' ' ' ' • Reaction Wheels
' ' , Telemetry Module - - ... - ... ... - - - - - - - - - - - - - - - - - - - - - - - - - - - - - J , ACS/RCS Module
- - - - - - - - - - - - - - - - - - - - - - - - _,
,- · ' \
Naval Research Laboratory Washington, DC 20375-5000
_.--'!

r:rl t::�ss::J s tar Tracker (S)
A uto Exposure (A)
0 bject Centroldlng (A)
lm age Compression (A)
E arth/Lunar Lim DetecUon (A)
CDRJFS-6
Software Requirements Overview
Guidance, Navigation & Control
Flight Software
1-- Guidance, NavlgaUon & Control ExecuUve
1- A!Utude DetermlnaUon
1- AtUtude Control- Multiple Modes
1-- Navigation - State Vector PropagaUon
- Autonomous NavlgaUon
� Terminal Guidance- Pointing Control
1-- Thruster Control
'--- Solar Array Control
Telemetry & Command
1-- Validate Upllnked Commands & Data
1-- Support Real-Time Commanding
1-- Support Stored Commanding
� Support Event Driven Commanding
1-- Support Variable Telemetry Downlink Rates
t- Format Telemetry Packets & Frames
1-- Log Telemetry Packets & Frames
1...-- Log Telemetry To Solid State Recorder
1::1 = NRL
Resource Manager
1- Maintain Time
1- Communication Services
1- Load & Dump Memory
1- Manage Tasks
1- Verify Processor Health & Status
1- Initial Bootup to "Sale" Spacecraft State
1- Interrupts, Device Interfaces
�....-. ��a�$��:X%1<';lt f?.��;w,l�����L�
�:;,� "' LLNL Provided Software (S) or Algorithms (A) NRL to Implement for DSPSE
FS-34
Naval Research Laboratory Washington, DC 20375-5000

CDR/FS-7
Flight Software Top Level Interfaces
Sensor CMOS Image Data
IMU Data, ACS/RCS Status
ACS/RCS CMD, Status
Guidance, Navigation &
Control
TLM Uplinked, Stored CMOS
Quarternions, Image Proc Results
Image Proc Req
T&C Database
Resource Memory Dump, ·Manager
Time, TLM
Memory Loads,
Time, Cmds
CMD Uplink TLM Downlink
J
GN&C Image
Processing
TLM
Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-8
Flight Software/Processor Configurations
Nominal R3000 Operation Only
Mode
R3000 1750 R3000 1750
Resource Manager - 8 Command & Telemetry • GN&C 8 GN&C Image Processing -
0 GNC Image Processing on 1750 to include: • Star Tracker - Auto Exposure - Object Centroiding
e
-
-
-
1750 Only Mode
R3000 1750
-
--
0
Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-9
I
I )
Flight Software Processor Architecture
• House Keeping Processor (HKP)
- Processor
- Clock Speed
- Performance
Memory
- Development Language
Host Development Platform
• Sensor Interface Processor (SIP)
- Processor
- Clock Speed
- Performance
• Memory
- Development Language
Host Development Platform
j
Honeywell 1750A
9MHz
1.67 MIPS, 1 MFLOPS
384 KBytes ROM, 1.25MBytes RAM
Ada For Existing Software
"C" For New Software
VAX/VMS
IDTR3081
20, 10,5 MHz
18 MIPS, 3.5 MFLOPS @ 20MHz
1 MByte ROM, 2MByte RAM
"C"
SGI/Unix Naval Research Laboratory Washington, DC 20375-5000

Flight Software Development Approach
• Reuse Existing Hardware & Spacecraft Bus Developed for NRL ASC Program (Dual Processor Architecture (17 50 & 8086) Similar to DSPSE)
• Reuse Existing NRL/LLNL/COTS Software Modules
• Develop New Software in "C" to' Ease Porting Between 1750 & R3081
• Establish an 0/S Service Interface Library For Writing Portable Application Software
- "C" to Existing Ada Software on 1750
- "C" to VxWorks on the R3000.
• Define Standard Message Passing Interfaces
- Intra-Processor, Inter-Processor, Ground-Space
• Build 0 Software Capability Demonstration
Naval Research Laboratory CDR/FS-10 Washington, DC 20375-5000

NRL ASC Functional Overview
� ------POWER CONVERTERS
L -------
..-- PRIMARY POWER
POWER
CONVERTER
I
·--------------------- 1 I �ERFACEELECT RONITCS
I I I
r- -1-=:=J
,
DRC BUS
I I I
1.5.53 BUS INTBRFACB
15.53 BUS
LOCAL COMMAND
BXTBRNAL DIRBCI' INTBRRUPI'S COMMANDS
• ALL 1/0 FUNCTIONS ON FOUR MODULBS
SP
I I
J I
LOCAL INTBRFACB
DOWNLINK UPLINK INTBRFACB INTBRFACB
,
DOWNLINK UPLINK
CBA
TIMING
• RADIATION HARD C-MOS LOGIC IMPLEMENTATION FOR LOW POWER
• STANDBY REDUNDANT IMPLEMENTATION
•INTELLIGENT CONTROLLER FOR 1553 AND LINK INTERFACES L---------------
CDR/FS-11
I
P RIMARY POWER --- - -- ,
MEMORY
CONVERTER I f-J
r PROCEssiNG ELECTRoNITcs
I I 1
� I I I
r
17.50A
PROCESSOR MODULB
CPU-A
I I
POWER BUS
-. ASC BUS
,.... 17.50A
PROCESSOR MODULE
CPU-B
I I
RANDOM ACCBSS MEMORY
(4MODULBS) (2S6K WORDS EA.)
•INDUSTRY STANDARD, RADIATION HARD, LOW POWER, IDGH PERFORMANCE MIL-STD-1750A PROCESSOR TECHNOLOGY PROVIDES 3 TO 4 MILLION INSTRUCTIONS PER SECOND (MIPS)
•1 MEGAWORD OPIDGH DENSITY,LOW POWER, RADIATION HARD C-MOS MEMORY
• ENHANCED SOFIW ARE (IDGH LEVEL LANGUAGE,
MODERN SOFIWARE DEVELOPMENT ENVIRONMEN1) INSTALLED IN WRITEABLE PROGRAM MEMORY FOR ON-ORBIT REPROGRAMMABILITY
• STANDBY REDUNDANT IMPLEMENTATION L-------------
Ase l'lml:dlliLII OYozvlow
Naval Research Laboratory Washington, DC 20375-5000
'\ )

CDR/FS-12
Software Reuse (1 of 10)
• TLD Ada Single Program Kernel (SPK) to Provide 1750 Multi-Tasking Environment (COTS)
• VxWorks Operating System for R3081 (COTS)
• Resource Manager (1750 Ada}:
- Task to Task Communication (1000 Ada SLOC)
Event Flag Services (500 Ada SLOC)
- Time Maintenance/Services (1120 Ada SLOC)
- Memory Management (1000 Ada SLOC)
- Debug Tools (1650 Ada SLOC)
• Command & Telemetry (1750 Ada):
- Spacecraft Command Language (SCL) Real-Time Engine (12,000 Ada SLOC)
• Star Tracker (R3081 "C")
- Attitude Determination
• Ground 1750 Support Software (VAX "C"):
- 1750 Virtual Control Port (VCP) Support Naval Research Laboratory Washington, DC 20375-5000

Software Reuse • Standard Message Data Flow (2 of 10)
® SAM PUT
Task A
@) SAM_ALLOCATE
Task A-
@) Allocates a msg buffer
® Puts the msg into the queue (determined by msg ID)
CDR/FS-13
\ /
Pointer to Block
·CD ® SAM REGISTER & ASSIGN
TaskB
· @SAM_GE
\ I
j
G)SAM _DEALLOCATE
Task B-
(!) Registers a Queue
® Assigns Msg ID(s) to the Queue
@) Waits on a message in the Queue
@) Gets the msg from the buffer
(f) Deallocates the msg buffer.
Naval Research Laboratory Washington, DC 20375-5000

Software Reuse - Sample Message Interface Definition (3 of 10)
'
CDR/FS-14
Source Destination Task
: Uplink Command : Memory Load & Dump
SAM NAME SAM=ID
WORD
:TBLCMD :TBD
FIELD BIT POSITIONS
SAMID# 0 .. 7
0
Word Cnt a .. 15
I
#Copies 0.7
1
SUB_CMD a .. 15
Table_ID 0 .. 7
2
Table_TYPE 8 .. 15
3 Rate 0 . . 15
TYPE
Uinta
Uinta ·
Uinta
Uinta
Uinta
Uinta
Ulnt16
VALID VALUES
TBLCMD
n+2
0 -Checksum 1-254 = # Copies 255 = lndefinitly
TBDMP .. ox04
all
all
all
UNITS
na
words
na
na
na
na
na
DESCRIPTION
Message Identifier
length of the message where n Is the number of words of table data In this packet
Represents the number of copies of the table to be dumped �own the downlink
Sub Command for Table Dump cmd
ID of the table within the type which Is being requested to dump.
Represents the number of Words in the table after all the blocks are read.
Represents the rate with LSB=ams at
which table segements will be downllnked.
IF9·33
Naval Research Laboratory Washington, DC 20375-5000

Inter-Processor Communications (4 of 10)
Sensor Interface Processor (R3081) HouseKeeping Processor (1750)
SIP DPR bus (8K x 16)
,.,...f-----1 SIP In Msg
SAMID 101
Msg Ptrs
SIP In Data
�------�S�I�P�O=u�tD�a�m�-r---� Semaphores
Note: DPR 1/F Mgr is new software. Uses SAM Message Routing to Route Messages to Application Task after retrieving the Message From the DPR Queue.
CDR/FS-15
�\ I
' ) I
/
Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-16
Inter-Processor Communications Description (5 of 10)
• Dual Port RAM (DPR) On The R3081 Provides Shared Data Access Between 1750 and R3081 Processors
• The DPR Interface Manager Task and DPR Interface Library (On Both The 1750 & R3081) Provides All Access To the DPR. Access is Controlled via the DPR Semaphores.
• Two Circular Queues, lm plemented in Software, Provides a Mechanism for Pa�sing SAM Messages Between Processors
• A Direct Access Data Area Provides For High Frequency Updates of Data Without Message Overhead (Minimum Use)
• Applications Simply Use Standard Message Passing Services. Message ID Routing Provides a Transparent Mechanism for Routing Data Between Processors.
• Interfaces are 32-bit Word Aligned In Order to Use Common "C" Include Files for Interface Definitions.
• Floating Point Conversions from 1750 ->IEEE format occur on the R3081
• Word Swapping For Data Items > 16 Bits Occurs on the R3081
Naval Research Laboratory Washington, DC 20375-5000

Software Reuse - Event Flag Managment Control Flow ( 6 of 10)
Task A @EF_SET <!)EF_WAIT
0 EF#l
TaskB
--------... ® EF _SET Interrupt Service Routine
Task A-® Sets Event Flag #1
ISR •
® Sets Event Flag #2
CDR/FS-17
' j
EF#2 Task B-
CD Waits on EF#l to Occur (Blocks Until Event Occurs)
® Unblocks & Process EF#l
@) Polls EF#2 by doing a GET (Task B continues to process even if EF#2 is not set)
Naval Research Laboratory Washington, DC 20375-5000

,_..,.----... I . I
)
Software Reuse • Timer l�iaintenance Data Flow (7 of 10)
8ms Interrupt
DHU (Dual Port Mem)
Frame Counter 16 bit (LSD =4ms)
CDR/FS-18
Command Input Task
uplink commands
SMQ
UTC Time
Packet
SMQ
Telemetry Output
UTC Time of Day
UTC Day of year
I I I
Naval Research Laboratory Washington, DC 20375-5000

Software Reuse • Timer Services Data Flow (8 of 10)
_jl_rL 8ms Interrupt
DHU (Dual Port Mem)
CDRJFS-19
\
)
Frame Counter 16 bit (LSB = 4ms)
Precision Timer Request
TASKS
Timer Services
Set Event
Return UTC Time
TASKS
Naval Research Laboratory Washington, DC 20375-5000
)

CDRJFS-20
Software Reuse - 1750 Memory Management (9 of 10)
Physical Address Space
PARTITION A
4KPage
PARTITION B
0000
Allocate
15
Logical Page
Registers
TASK A
TASK A
1) Allocates a 4K Page from a Memory Partition
2) MAPS that Partition to a Logical Page Register in order to access the memory.
Naval Research Laboratory Washington, DC 20375-5000

Software Reuse - Command Processing Data Flow (10 of 10)
CDRJFS-21
Event Notices FromTMTASK �
----------�··�
Mission Constraint
Rules
"
Command Packets
From CMDIN LL---------........------1•• SMO
_ I
SMQ = Standard Message Queue
SMQ , . To Other CSCs �
FS19
Naval Research Laboratory Washington, DC 20375-5000
)

Portable Flight Software Layered Architecture (1 of 7)
Application S/W
0/S 1/F Library
Multi-tasking 0/S
Platform
CDRJFS-22
"C" �pplication Programs
C->Ada RM Services
TLD Ada Tasking &
RM Services
1750A
C->VxWorks
VxWorks
R3081
Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-23
/
R3081 Software Architecture ("C") (2 of 7)
"C" Main Function
for Task 1
-...
-..
,,
VxWorks 0/S Services
(" C" Functions)
-MsgComm • Event Flags • Time Services • Memory Mgmt
·� ,,
C ·> VxWorks 1/F
l.ihrarv
VxWorks
-..
-
Task Switching
-
"C" Main Function
for Task 2
-�
"C" Main Function
for Task 3
Naval Research Laboratory Washington, DC 20375-5000
)

I
CDRJFS-24
I
1750 Software Architecture (Ada & " C " ) (3 of 7)
�.
r
Ada Task 1 I RM 0/S Services (Ada Packages)
J Ada_•> "C ," IfF
-MsgComm - Event Flags -Time Services -Memory Mgmt
"C" Main Function
for Task 1 �� ,,
- - C ·>Ada IIF - �
Library
TLDAda
SPK
Task Switching
- - Ada Task2 - ...
•
I
..
AdaTask3 I W Ada ·> "C" 1/F
"C" Main Function
for Task 3
Naval Research Laboratory Washington, DC 20375-5000

1750 Software Architecture (Ada & " C " ) Description (4 of7)
• TLD Ada Single Program Kernel (SPK) Provides Multi-Tasking Environment Using Ada Tasking
• Each Task Consists of an Ada Task Shell (To Support Task Switching by the TLD SPK) & a "C" Main Program Which Implements the Flight Software Requirements
• The Existing Ada Resource Manager Operating System Services Provide · Inter-Task Communications via Messages & Event Flags, Timer Services,
& Memory Mangement. The Ada RM Interfaces With The TLD Ada SPK To Initiate Task Switches.
• The Ada-> "C" Interface Provides a Simple Mechanism to Call The Main Function of a "C" Program in the Context of an Ada Task
• The "C"->Ada Interface Library Provides Access To The Existing Ada Services From "C" Functions
Naval Research Laboratory CDRJFS-25 Washington, DC 20375-5000
\ \ I
/

Ada & "C" Interfaces Example (5 of 7)
ADA Task A
Task Body TASK_A Is BEGIN
Task.lnlt C_ Task_A ( ld )
END TASK_A
Resource ManagerADA Packages
MEM Packages
SAM Packages
CDRJFS-26
C main() Procedure
ADA TO #Include SAM_Publlc.h
C ---Mil.- C_Task_A ( var1, var2)
Interface I
Library Sam_Queue_Type queue; Sam_Message_Type msg;
tr
while (1)
{ tr
SAM_Reglster_Queue ( "queue ); SAM_Message_Asslgn ( (ID_TYPE) ID, "queue)
tr
*
tr
SAM_Get ( LEVEL1, BLOCK, &msg, &type, &size); ..... -----+--+--
c TO
ADA Interface Library )
( Processes Recleved Message )
)
Naval Research Laboratory Washington, DC 20375-5000

CDR/FS-27
1
ADA to'"C" Interface Library Code (6 of7)
ADA Interface Package WITH system; WITH machine_ code;
PROCEDURE C Task A ( cid ); BEGIN - -
c addr : C Address Type; -
- -
get_addr( id=>cid, addr=>c_addr); clnk( c id=>C addr, inp=>O, outp=>O );
--
END C_ Task_ A;
PROCEDURE clnk( c id : in system.address, inp: in integer; outp : out integer );
BEGIN machine code.pshm(ra=>r0, rb=>r3); •• save regs machine-code.pshm(ra=>rll, rb=>rl4); machine:code.pshm(ra=>r4, rb=>rlO); •• addr of in/out machine_code.js(ra=>r13, offset=>O, rx=>r3); •• addr c func machine code.popm(ra=>r4, rb=>r4); machine-code.popm(ra=>rll, rb=>r14); machine-code.popm(ra=>rO, rb=>r3);
T.''llo.Tn ·•· .1.
-
Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-28
"C" to ADA Interface Library Code (7 of 7)
"C"Interface Package
#include SAM Public.h extern alnk();-
Return_ Status SAM_ Queue_ Register ( Queue )
Queue Name Queue; {
-
}
alnk (SAMREGISTER, Queue ); return RET_ Status;
ADA Interface Package
WITH machine_ code;
PACKAGE BODY ada Ink IS addr _tab: array (0:.31) of system.address := ( 0=>SAMALLOC,
l=>SAMREGISTER, etc,etc,etc, 3l=>GETGMT);
PROCEDURE alnk IS BEGIN
machine_code.popm (ra=>rl, rb=>rll); ·-load parms into regs machine_code.l (ra=>r2, rb=>addr_tab'address, rx=>r2); ·-get ada proc addr machine_code.sjs (ra=>sp offset=>O, rx=>r2); •• jump to ada proc machine_code.pshm (ra=>rl, rb=>rll); ··put params back machine_code.sisp (ra=>sp, n=>l); ··stack adjust machine_code.jc (c=>unc, offset=>O, rx=>rl3 ); --return to 'C' caller
Naval Research Laboratory Washington, DC 20375-5000

Flight Software Build 0 I&T (1 of 3)
j \ ���� \����� �¥Wl j j R3000 Flight SIW
�J���Ji�j� ���cl�i Host
(SGI Iris Indigo) � : � : ; : ; : : : : : : : ; : : : : : : : : : : : :
RS232
Ethernet
DSC Test Unit (DTU)
CmdSim -
Tim Sim -
ACS/RCS Sim - l
IMU Sim
· · ·:vcFn;:r.: · · · - -:::::: ... : : ·:::::::: ..... ...
.·.··��I:.N ·'•'• : : : :: . . ... I: I ::::: 1
BIT-3 Memory
'
Mapped 1/0
Subsystem Simulator VME Chassis
PC
T asking RS232 Pointing &
Messages
LjUU�J =Included in Build 0 Capabilities Demonstration
CDRJFS-29
\ )
l lt�i 1d��W�l4�
iii l i l i G�f:m! i I [I i
DSC Flight Brassboard
: �: � : �: ¢MQ. �: � : �: � : � ::::::::r:tM:::::::::: s
ACS/RCS c
�::: � :t?.oWf!ij::: �::: B ::::::: �=r�o�:::::::: u �:�®.��M�M:�: s
R3000 DHU
SSDR
-
I ,� ,
:F'ram9: : :SY.nci: .... ·.·.
pq�t;J. : : : : :::l:)h=: .H�1� .·.· . . · .
Sensor Simulator
PC
Naval Research Laboratory Washington, DC 20375-5000
) /

CMD Uplink
Data 1/F
Downlink Interrupt Telemetry TM 4-----t Downlink
CDRJFS-30
Data 1/F
8msec
Build 0 Accomplishments (2 of 3)
er Control
Cmd Packet
Structure (Double
SAM Buffer)
__________.r-�:· Telemetry
Naval Research Laboratory Washington, DC 20375-5000

Build 0 Accomplishments (3 of 3)
• Resource Manager:
- Task Management (Event Flags, Message Passing)
- Interrupt Service Routines (CMD Receiver, TM Downlink FIFO, Timer Pulse)
- Command/Telemetry/Global Memory Card H/W <·> S/W Interfaces
. Ada <·> " C " Interface Libraries for Task Execution & Message Passing
• Command & Telemetry :
- Command Input Task (Cmd Uplink Validation)
- Spacecraft Command Language· Uplinked Commands & Small StoredCommand Scripts.
Telemetry Gathering & Telemetry Bypass Downlink (test format)
SCL Telemetry Data
• Support Software:
- File Control Program (FCP) for 1750 Virtual Control Port (VCP) Interface
Naval Research Laboratory CDR/FS-31 Washington, DC 20375-5000
\ l \ ) /

CDR/FS-1
Flight Software Top Level Data Flow
Sensor CMOS Image Data
IMU Data, ACS/RCS Status
ACS/RCS CMD, Status
Quarternions, lm Proc R esults
TLM Uplinked,
T&C Database
TM LOG
S/CCMD
Stored CMOS
Resource Memory Dump, Manager
Time,
Command &
Telemetry
Memory Loads,
Time, Cmds
CMD Uplink TLM Downlink
GN&C Image
Processing
TLM
Naval Research Laboratory Washington, DC 20375-5000

CDR/FS-2
. \ \ )
G,uidance, Navigation & Control Requirements (1 of 3)
• Guidance, Navigation & Control Executive
- Mode Control
- Generate Commanded Attitude
- Momentum Monitor
- Inertial Properties Update
• Attitude Determination & Control
- IMU Interface & Processing
- Combine IMU & Star Tracker Data
- Spin Rate, Precession & Nutation During Spin Stabilized Flight
- Jet & Reaction Wheel Control
- 12 Modes: Lifeboat, Lunar Mapping, Earth Pointing, Asteriod Fly-By, Slew Maneuver, Inertial Pointing, Delta V Pointing, Momentum Dump, Plus 4 For Spin Stabilized Flight
Naval Research Laboratory Washington, DC 20375-5000
' \
_/

CDR!FS-3
Guidance, Navigation & Control Requirements (2 of 3)
• Orbit Propagation
- Propagates Satellite Orbit From Uploaded State Vector
- Computes Vectors From Satellite To Earth, Sun, & Moon
• Autonomous Navigation
- State Vector Update From Moon Or Earth Observations
- Modes Include Disabled, Test, & Enable - If Enabled, Computes Vectors To Earth, Sun, & Moon
• Terminal Guidance & Control
- Asteroid Ephemeris Update
- Pointing Control - Slew Manuever Activation If Necessary
• Sensor Processing & Control - Interface To All Imaging Sensors - Measurements:
- Star Tracker Attitude
- Autonomous Navigation Data
- Asteroid
- Auto Exposure Naval Research Laboratory Washington, DC 20375-5000

CDRJFS-4
Guidance, Navigation & Control Requirements (3 of 3)
• AV Thruster Control
- Initiate Attitude Change
- Start Thruster
- If Guided Burn, Compute Desired Attitude
- Integrate Accelerometer & Terminate Thrust
• Solar Array Control
- Rotate Solar Arrays
- Enable/Disable Hardware Controller
• Scheduler Support
- Provide Trajectory Data To Scheduler
Naval Research Laboratory Washington, DC 20375-5000
�� -'\ .�