Base Isolation Strategies Employing Magnetorheological Dampers

Dynamic Characteristics of a Magnetorheological Pin Joint for Civil
Structures
Yancheng Li and Jianchun Li Centre for Built Infrastructure Research, Faculty of Engineering and Information Technology, University of Technology
Sydney, NSW 2007, Australia
Email: [email protected]
Abstract:
Magnetorheological (MR) pin joint is a novel device in which its joint moment resistance can be controlled in real-time by altering the applied magnetic field. The smart pin joint is intended to be used as a controllable connector between the columns and beams of a civil structure to instantaneously shift the structural natural frequencies in order to avoid resonance and therefore to reduce unwanted vibrations and hence prevent structural damage. As an intrinsically nonlinear device, modelling of this MR fluid based device is a challenging task and makes the design of a suitable control algorithm a cumbersome situation. Aimed at its application in civil structure, the main purpose of this paper is to test and characterise the hysteretic behaviour of MR pin joint. A test scheme is designed to obtain the dynamic performance of MR pin joint in the dominant earthquake frequency range. Some unique phenomena different from those of MR damper are observed through the experimental testing. A computationally-efficient model is proposed by introducing a hyperbolic element to accurately reproduce its dynamic behaviour and to further facilitate the design of a suitable control algorithm. Comprehensive investigations on the model accuracy and dependences of the proposed model on loading condition (frequency and amplitude) and input current level are reported in the last section of this paper.
Keywords: Magnetorheological Pin Joint; Hyperbolic Hysteresis Model; Experimental Testing; Frequency Dependence;
1. Introduction
The protection of civil engineering structures from hostile dynamic loadings such as earthquakes, gust winds, and fierce waves is one of the biggest challenges facing civil engineering community and hence is of significant importance [1-2]. As most civil engineering structures have fixed natural frequencies, the effects of dynamic loadings will be greatly amplified when the structural natural frequencies fall within the range of excitation frequencies. It is, therefore, highly desirable if a civil structure can shift its natural frequency, with the assistance of smart structural members, away from resonance induced by excitations in real time to mitigate harmful dynamic loadings.
The advent of smart materials such as Electro/magneto-rheological (ER/MR) fluids have attracted much attention recently. The essential characteristic of ER/MR fluids is their instant ability to reversibly change from free-flowing, linear viscous liquids to semisolids having instant controllable yield strength when exposed to either an electric or magnetic field [3]. Of particular importance to vibration control is the case
1

with which the damping and stiffness properties of a structure equipped with ER/MR fluid devices can be varied. Notably, compared with active control systems, the power needed by MR based systems is only 20-40 volts which can be easily achieved by normal batteries [4-5]. Hence, MR fluid based devices are becoming great candidates for civil engineering applications and are often incorporated into smart structures design as smart structural members [6]. Many efforts on semi-active vibration control of civil engineering applications using MR devices have been undertaken recently[6-14]. Challenge for semi-active structural control lies in the complex and hysteresis feature of ER/MR devices. Hence, developing an efficient and effective dynamic model for ER/MR devices has becoming an urgent task.
Various dynamic models have been developed to reproduce the nonlinear dynamic behaviour of ER/MR dampers. Stanway et al.[15] proposed a model for ER damper using a Coulomb element in parallel with a viscous element. The model was unable to match observed ER fluid behaviour atlow field strengths since ER materials show Coulomb-like behaviour only at high field strengths. Masri et al. [16] developed a model of an ER fluid based Dynamic Vibration Neutralizer (DVN) using Chebyshev polynomials of the displacement and velocity. However, in order to use this model for a control application, 64 coefficients were needed to be estimated for a single field strength value, making the computation a huge challenge. Wereley et al. [17] proposed a nonlinear hysteresis biviscous model as an extension of nonlinear biviscous model[18] to better reproduce the pre-yield hysteresis of MR damper. Spencer et al. [10, 19] developed a phenomenological model for MR damper based on the Bouc-Wen hysteresis model. This model contains a modified three-parameter fluid model, by introducing a Bouc-Wen element, and a spring element in parallel. Coefficients of the proposed model were estimated based on the experimental results of 2.5Hz loading. However, above-mentioned models only work in a single loading condition, for example, the loading condition with a single frequency and single amplitude. It is clear that the behaviour of ER/MR fluids varies much when the loading condition changes[20].
Normally, the responses of the ER/MR materials are defined as three rheological regions: pre-yield, yield and post-yield. Within each region there is a different mode of deformation, viscoelastic in pre-yield, viscoelastic plastic in the yield and plastic in the post-yield region. It is suggested by Gamota and Filisko[21] that the deformation modes are dependent on the applied field strength, strain amplitude and strain frequency. A study of an aluminosilicate ER fluid under high frequency excitation, 300-400Hz, was explored by Gamota and Filisko[22]. It is found that the response of the specific material is linear viscoelastic when subjected to electric field in the range of 0.0-3.0kV. Comprehensive studies on the viscoelastic response of ER fluid, in term of frequency, field and strain dependence, were investigated by McLeish et al. [23] and Jordan et al. [24]. Frequency and amplitude dependence of MR fluid were also observed[25-26] to be similar as that of ER fluids. Consequently, those dependences should be taken into account while developing an accurate and efficient model of ER/MR devices for further control applications. However, in most dynamic models for ER/MR devices, the coefficients are determined as only related to the applied current. Development of an extended model considering all the conditions, including magnetic field strength, loading frequency and amplitude, is becoming urgent in order to capture all the dynamics of the device.
In a tempt to develop a generalised and accurate model for MR damper, Yang et .al [11]and Spencer et al. [19] proposed a phenomenological model which considers the adhesive phenomenological of MR fluid, as
2

well as inertial and shear thinning effects. To achieve this, he introduced a modified damping constant into the Bouc-Wen model with the form of a mono-decreasing function with respect to absolute velocity. Wang et al. [27] proposed a generalised model synthesis to characterise the hysteretic force-velocity characteristics of a controllable MR damper under a wide range of sinusoidal excitation conditions (frequency and displacement amplitude) and magnitudes of control current. Symmetric and asymmetric sigmoid functions on the basis of fundamental force generation mechanism were used in this model and an exponential function of maximum velocity was introduced to consider the effects of loading frequency and amplitude on the damper hysteresis performance. Dominguez et al. [28] also reported an exponential function to develop a general current, frequency and amplitude dependent model based on the Bouc-Wen model. It was demonstrated that an excellent agreement exists between the simulated results generated by the proposed model and the experimental results. To practically utilise these generalised models in the control applications, frequency and motion sampling should be taken for the sake of identifying the potential performance of MR damper under certain current input in feedback control system.
In civil engineering, smart devices such as ER/MR dampers have been proposed as great candidates to accomplish semi-active control strategies for seismic protection[7-10, 14]. It is well known that earthquake excitation consists of a number of motions with various frequencies and amplitude. It is cumbersome and time-consuming for a real-time structural control system to obtain the needed information (frequency and amplitude) and achieve optimal control results. Masri et al. [16] suggested that for the primary system of a civil structure its operating bandwidth is narrow enough so that the frequency dependence of the hysteresis ER device can be neglected. Ali and Ramaswamy [29] reported that there are two groups of parameters in 6 parameters of Bouc-Wen model of MR damper. Some of them (γ, β and A) show slow change with frequency, amplitude and input current and hence were treated as constant at their average values. The rest of the variables (c0, k0 and α) are frequency, amplitude and input current-dependent. Due to the troublesome in structural control application, the effects of amplitude of excitation and input current on the variables were considered while the frequency dependence was omitted.
Till now, MR fluid based smart devices for seismic protection normally mean MR dampers. However, the research on novel smart member, i.e. smart pin, has yet to be explored. The idea of using controllable pin joints as structural members to develop an intelligent civil structure was recently proposed by the authors [30-31] and has received positive feedbacks and has attracted considerable attention. MR pin joint is a smart structural member whose joint moment resistance can be controlled in real-time by altering the magnetic field. The smart pin joint can be used as a rotational connector at the column-beam connection in a civil structure. By changing the electric current of the magnetic coils, the output torque of the MR pin joint can be adjusted from nearly zero joint moment (pinned) to full capacity (locked). Hence, the rigidity of the structural connection can be varied between fully rigid and fully pinned as well as any state in between. Thereby, the natural frequencies of civil structures can be shifted in order to avoid the resonant frequency region and therefore prevent damage.
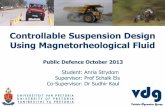
A proof-of-concept MR pin joint was previously designed and prototyped by authors through a PhD research project in 2006 [30], as shown in Figure 1b. Preliminary research [30-31] on a single-storey frame model with a 1st generation MR pin indicated that the natural frequency of the frame can be changed from 0.7 to 1.2Hz (72% shift). However, the primitive and non-standard design made the characterisation and
3

modelling MR pins unrealistic and hindered further deployment in an intelligent structure using such MR pins. The second-generation MR pin joint has been designed and prototyped by the authors [32-35], as shown in Figure 1c. It has a disk-type setup in which the interaction between the rotating plate and controllable MR fluid produces controllable moment resistance. Compared with the first-generation MR pin joint, the second-generation pin joint has been designed and fabricated in a standard manner which enabled modelling and characterising of the device.
MR pin joint
a) MR pins in a two-storey building frame b) First-generation MR pin c) Second-generation MR pin
Fig. 1. MR pin joint and its application to a civil structure
In this paper, the experimental set up was designed to use a shake table to characterise the new structural member, MR joint. A series of comprehensive tests were conducted using sinusoidal loading with interested narrow bandwidth of frequencies and amplitudes to characterise the MR pin joint. A novel model for MR pin joint, namely, rotational hyperbolic hysteresis model was proposed to describe the moment-angle displacement relationship of the MR pin joint under influence of different magnetic fields. This model consists of rotational spring k, rotational viscous damping of the pin c and a hysteretic element. A hyperbolic tangent function was used to represent the hysteretic loop of the MR pin joint. The attractive feature of this model is that it maintains the hysteretic character of the MR pin joint and, at the same time, reduces the complexity by using a simple equation to describe the hysteresis. The details of design, testing and parameter identification that identifies 6 coefficients of the proposed model is presented in the following section. The effectiveness of the proposed model will be evaluated by checking the errors between the numerical model and experimental data. Correlations of model coefficients with loading conditions, such as frequency and amplitude of the excitation, and input current will be studied. Particularly, frequency dependence of the proposed model in dominant earthquake frequency range is explored.
2. MR pin joint
A magnetorheological fluid (MR fluid) is a type of smart fluid in a carrier fluid, usually a type of oil. Normally, at zero magnetic field the iron particles, including big-size spherical shape particles and smaller-size irregular shape particles, randomly scatter in the carrier oil (silicon oil) and the addictives in the MR fluids will keep the micro-size iron particles from sedimentation. Under a magnetic field, the iron particles align with the direction of the magnetic field to form a head-to-tail particle chain. Exposure to a magnetic field transforms MR fluids to a plastic-like solid in milliseconds. Removal of the magnetic field allows the fluid to return to its original state. The induced chain structure can be broken under flow when the stress
4

caused by the flow exceeds the yield stress of the MR fluids.
The MR pin joint mainly consists of five parts: a rotary thin plate inside the pin joint, a shaft connected to the plate to transfer the joint moment, two uniform housings to form the hollow cavity, MR fluids between the housing and plate, and a circular coil producing magnetic field to magnetise MR fluids. MR pin joint works in shear mode, as illustrated in Figure 2. In shear mode, two parallel plates are moving relative to one another and hence shear flow occurs. One end of the chain structure attached to the moving boundary is firmly connected to the plate and the chai structure remains linked when the moving is below a certain distance. Once the shear stress overtops the yield stress of MR fluid, the chain structure will be broken and the broken chain structure will soon capture the next adjacent chain under the action of magnetic field. The chain structure produce the shear stress under flow which is the reason the force comes from in a view of macro-scale. Because of the unique features of MR fluids, MR pin joint is capable of instantly changing its output under a variable magnetic field. This device also has other advantages as simple construction, low power requirement and fast response, thus enabling the physical states, i.e. stiffness, of smart structure equipped with smart MR pin joints to be field-controllable.
a) Particle chain under steady state b) Particle chain under shear mode c) Recapture of particle chain
Fig. 2. Working principle of MR pin joint in shear mode
Table 1. Structural parameters of the MR pin joint
Structural Parameters Dimension mmShaft radius R1 12.5
Radius of rotary plate R2 40
Gap h 1
Outer diameter D 140
Inner diameter d 90
Thickness B 40
Detailed structural parameters of the MR pin used in this paper can be found in Table 1. There are gaps of approximately 1 mm between the plate and the housings, to hold the MR fluids therein. Inside the gap is filled with MR liquid (MRF140CG) purchased from Lord Corporation. The liquid can provide yield stress of up to 60 kPa at saturated magnetic field of B=1.0 T. Due to the high capacity of MR fluids, this MR pin joint can produce about 15Nm of torque with a saturated current of 2.0 A.
A comprehensive analysis on the modelling of MR pin joint under steady rotational speed was investigated in reference [32-33]. It was found that, the total torque produced by the MR pin joint can be formulated as:
T=πηh (R2
4−R14 )ω+ 4 π
3 ( R23−R1
3) τ y (1)
5

Clearly, the torque that a MR brake produces consists of two parts:
T η=4 π3 ( R2
3−R13 ) τ y (2)
T vis=πηh (R2
4−R14 )ω (3)
Where, coulomb torque, Tη, is the torque related to the yield stress of MR fluids due to coil current; Viscosity torque, Tvis, is the torque related to the fluid viscosity.
housing
shaft
MR fluids
plate coil
Fig. 3. Magnetic flux line in the MR pin Fig. 4. Magnetic field density in MR pin joint (I=2.0 A)
To validate the effectiveness of the design, a finite element analysis is explored to see whether the magnetic field intensity in the MR fluid reaches the saturation field or not. The distribution of the magnetic flux line is illustrated in Figure 3. Note that the magnetic field across the housing of MR pin, MR fluid and the rotational plate forms enclosed loops. Finite element analysis shows that, at the field level of I=2.0 A, the magnetic field in MR fluid all over the gap reaches the saturation field intensity (B=1.0T). It also can be observed that the magnetic field intensity in the MR fluids near the edge of the rotational plate is bigger than that in other places along the radial direction. Conclusively, the design successfully achieves the saturation field when the applied current is 2.0A which is also the maximum input current for the MR pin joint.
3. Experimental setup for the characterisation test
In order to characterise the nonlinear hysteretic behaviour of the MR pin joint at relatively large frequency range and angular displacements, an experiment was undertaken on the 10-tonne capacity, 3m x 3m MTS uni-axial shake table at the Structures Laboratory, University of Technology Sydney, shown in Figure 5. The laboratory test was designed to obtain the moment vs. angular velocity relationship of the MR pin at different levels of magnetic field intensities and loading frequencies. In this setup, the shaft of a MR pin joint was mounted to a stand on the floor outside the shake table. Two steel plates fixed on the housing of the pin were firmly attached to the shake table by a steel rod. A load cell, with capacity of 300N, was attached to the steel rod to measure the force applied to the MR pin. A custom-designed current amplifier was used to supply currents to the magnetic coil of the MR pin, hence providing magnetic fields with desired intensities. Two linear position sensors were used to measure the horizontal and vertical displacements of the tip of the steel rod. Data from load cell and linear position sensor were recorded by the data acquisition system of the shake table control and acquisition system. In order to capture the desired dynamics of the collected data, the sampling rate was set at 2,048 Hz. The dSPACE software, ControlDesk,
6

was used to generate and monitor control signal to provide desired input to the amplifier.
Since the dominant frequencies of the earthquakes are generally below 5 Hz, the frequency range of the input sinusoidal waveform was set around 0.1-3Hz in the dynamic tests. A series of harmonic excitations at frequencies of 0.1, 0.5, 1.0 and 2.0, were simulated by the shake table to evaluate the nonlinear hysteretic behaviour of the MR pin joint. The amplitudes of the excitation were 7.06, 17.65, 28.20 and 35.20 mm respectively, representing the maximum rotation angle of 2, 5, 8 and 10 degrees. During the tests, the MR pin joint was energised with various currents at 0, 0.5 1.0, 1.5 and 2.0A, respectively, through the amplifier. Hence, there were 80 tests in total conducted using the shake table to cover the combinations of current levels and excitation types. To obtain stable test results, the measurements were taken after the MR pin joint had undergone several hundred cycles of testing.
Load Cell
Reaction Floor
Current Amplifier
dSPACE LPS
MR pin
Shake Table Motion
LPS
a) Sketch map of experimental setup b) Experimental setup at,UTS
Fig. 5. Experimental setup for MR pin modelling test
4. Behaviours of the MR pin joint
As can be seen from Figure 6-12, MR pin joint exhibits hysteresis behaviour with some unique phenomenon, such as the “flat ends” at two branches of the hysteresis loop and “peanut-shape” hysteresis loop, which have never been observed in other MR devices. In this part, observations will be firstly made to discover the general behaviours of MR pin joint under various loading conditions and magnetic field intensity. An in-depth investigation will be explored later to find out the causes of these unique features of the hysteresis loops.
4.1 Hysteresis loop of MR pin joint
-0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1-15
-10
-5
0
5
10
15
Angular Displacementy (Rad)
Mom
ent (
N.m
)
-0.4 -0.2 0 0.2 0.4 0.6-15
-10
-5
0
5
10
15
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
7

a) Moment vs. Angular displacement b) Moment vs. Angular Velocity
Fig. 6. Experimental data for 1.0 Hz excitation with an amplitude of 17.65mm
The responses of MR pin joint under a 1.0Hz sinusoid excitation with amplitude of 17.65mm is shown in Figure 6 and the responses of MR pin joint under a 2.0Hz sinusoid excitation with amplitude of 7.06mm is shown in Figure 7. All the figures are plotted at five different current levels, 0A, 0.5A, 1.0A, 1.5A and 2.0A, illustrated with different line styles. The moment-angular displacement loops are shown in Figure 6 a) and Figure 7 a) and the moment-angular velocity loops are shown in Figure 6 b) and Figure 7 b), respectively.
The experimentally measured moment data shows a readily-observed increase while elevates the magnetic field. While, at the current level of 0A, the moment-angular displacement loop is approximately elliptical, representing a typical viscous device. Increasing the magnetic field leads to the expanding of the hysteresis loop and the increase of the slope of the hysteresis loop in roll-off region (low velocity area). Specially, when increasing the applied currents, the moment-angular displacement loop shows abnormity at high magnetic field when the angular displacement is negative and the angular acceleration is positive (or when the angular displacement is positive and the angular acceleration is negative). Note that the moment-angular displacement loop progress along a clockwise direction and the moment-angular velocity loop moves in a counter-clockwise direction. For the case when I=2.0A in Figure 6 a), the moment output rapidly climbs to 10Nm when the angular displacement moves away from the negative maximum displacement and then slowly shifts to the saturation output. The abnormity in the moment-angular displacement loop is also reflected in the moment-angular velocity loop in Figure 6 b) and 7 b) as the fatty branches of the loop.
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04-15
-10
-5
0
5
10
15
Angular Displacementy (Rad)
Mom
ent (
N.m
)
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-15
-10
-5
0
5
10
15
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
a) Moment vs. Angular displacement b) Moment vs. Angular Velocity
Fig. 7. Experimental data for 2.0 Hz excitation with amplitude of 7.06mm
8

-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2-20
-15
-10
-5
0
5
10
15
20
Angular Displacement (Rad)
Mom
ent (
N.m
)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-20
-15
-10
-5
0
5
10
15
20
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
A=7.06mmA=17.65mmA=28.2mmA=35.2mm
a) Moment vs. Angular displacement b) Moment vs. Angular Velocity
Fig. 8. Experimental data for 2.0 Hz excitation with various amplitudes (I=2.0A)
The moment data in Figure 6 a) reaches the saturation level when the angular displacement closes to zero. However, in Figure 7 a), the moment produced by the MR pin joint is still ascending, even when I=2.0A. To find out the reason behind this behaviour, a comparatively study is conducted for 2.0Hz excitation with various amplitudes, 7.06mm, 17.65mm, 28.2mm and 35.2mm, at the current level of 2.0A as shown in Figure 8. It can be observed from Figure 6 a) that the moment output of MR pin joint under the 2.0Hz excitation with amplitude of 7.06 mm is just reach its maximum value when the angular displacement is positive maximum. All four loops are in an irregular rectangular shape with obtuse turns at the top left and bottom right corners. The obtuse turn indicates the influence of angular velocity to the moment output. Reference [32-33] suggested that the absolute maximum/minimum value of the moment output is mostly related to the applied current and angular velocity has little effect on the peak moment output. However, the angular velocity of MR pin joint has distinct impact on the shape of the hysteresis loop, as shown in Figure 8 b).
4.2 “Crossover” behaviour of MR pin joint
An interesting behaviour of moment-angular velocity loop can be seen in Figure 7 b). When the angular velocity closes to reach its maximum value, either positive or negative, the moment output first gradually achieves the peak and then slowly falls down before the maximum angular velocity happens, thus causing a crossover area in two branches in the hysteresis loop, shown in Figure 7 b) when the amplitude of the movement is 28.2mm and 35.2mm. Generally, “crossover” behaviours appear at the two branches of the hysteresis loop when loading amplitude is large and the applied current maintains in a high level. The reason of this interesting phenomenon is because the moment output reaches the peak value after the angular displacement deviates from the maximum/minimum displacement and then gradually descends monotonously. Reflection of the change of moment output in moment-angular velocity loop is the “crossover” behaviour. Similar “crossover” features in the hysteresis loop were also reported in reference [14], [16] and [36].
9

-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2-20
-15
-10
-5
0
5
10
15
20
Angular Displacementy (Rad)
Mom
ent (
N.m
)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-20
-15
-10
-5
0
5
10
15
20
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
a) Moment vs. Angular displacement b) Moment vs. Angular Velocity
Fig. 9. Experimental data for 2.0 Hz excitation with amplitude of 35.2mm
4.3 “Flat-ends” of hysteresis loops
-0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1-15
-10
-5
0
5
10
15
Angular Displacementy (Rad)
Mom
ent (
N.m
)
-0.4 -0.2 0 0.2 0.4 0.6-15
-10
-5
0
5
10
15
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
Test Data:I=1.5A
a) Moment vs. Angular displacement b) Moment vs. Angular velocity
Fig. 10. Experimental data for 1.0 Hz excitation with amplitude of 17.6mm
Figure 10 shows the test data of MR pin at a 1.0Hz excitation with amplitude of 17.6mm when the applied current is 1.5A. It can be observed that, unlike the typical MR damper hysteretic behaviour, MR pin joint exhibits unique flat ends. In other word, the moment output remains constant in the post-yield region. Looking through all the test data obtained in the experimental testing, it is found that this behaviour is more obvious in the cases when the loading excitation is of a large amplitude and driven in low frequency. When the loading frequency is above 2.0Hz, the ends of the hysteresis loop don’t show any flat shape at all. This unique behaviour can also be traced back to the moment-angular displacement curve, as shown in Figure 10 a). The moment output of MR pin exhibits constant values at the top right and bottom left side of the curve.
4.4 “Peanut-shape” loop under high frequency and large amplitude loadings (zero field)
10

-0.1 -0.05 0 0.05 0.1 0.15-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Angular Displacement (Rad)
Mom
ent (
N.m
)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0Hz
a) Moment vs. Angular displacement b) Moment vs. Angular velocity
Fig. 11. Experimental data for 28.2mm excitations with various loading frequencies (I=0A)
Another interesting phenomenon happens when no current is input into the magnetic coil and the MR pin oscillates with excitations of large amplitude and high frequency. Figure 11 shows the experimental data of MR pin under 28.2mm loading excitation with various frequencies. When the loading frequencies are 1.0Hz and 2.0Hz, the moment and angular velocity loops clearly reveal peanut shape. It should be noted that this interesting behaviour happens only when no current is applied into the magnetic coil. The moment-angular displacement loops form approximate parallelogram shape, as shown in Figure 11 a). With the increase of driving frequency, the slope of the parallelogram increases and the enclosed area of moment-angular velocity loop increases as well.
5. Rotational hyperbolic hysteresis model
Developing an accurately and efficient dynamic model to reproduce the hysteresis characteristics of MR device is an interesting and challenging work. Since 1990s, a number of meritorious endeavours in the modelling of MR based devices have been paid by researchers [8-24, 27, 31-35] aiming to pave a way for its application on vibration control. Various models, such as Bingham model[11], Chebyshev polynomials model [16], Bi-viscous model[18] and Bouc-Wen model[8, 10-11, 28-29], have been proposed to portray the unique features of hysteretic MR devices. However, one of the main problems of this model is the evaluation of its seven model parameters. This model contains evolutionary variable z which makes the parameter estimation a time-consuming task. Hence, criticises have been raised due to its inherent difficulties in predicting the essential parameters[27]. To solve this problem, Jimenez and Alvarez-Icaza [38] proposed a new mathematical model modified from LuGre friction model which is capable of offering a good level of accuracy. Yang et al.[39] also used LuGre model to characterise the hysteresis of a large-scale MR damper (MR-9000 type MR damper).
Despite many efforts in modelling MR damper, the modelling of the oscillatory behaviour of MR pin joint is yet to be explored. As mentioned in section 4, the modelling of MR pin should characterise the moment-angular velocity relationship other than force-velocity relationship as in the modelling of MR damper. In this section, a computationally-efficient hyperbolic hysteresis model is proposed to portray the behaviour of the MR pin joint (Figure 12). The model consists of rotational spring k, viscous damping c and a hyperbolic hysteretic element [37] and can be formulated as:
11

T=c θ̇+kθ+αz (4)
z=tanh( β θ̇+δ sign(θ )) (5)
where T is the joint moment resistance from MR pin, θ andθ̇ are rotational angle and rotational velocity,
respectively. c and k are viscous and stiffness coefficients; α is the scale factor of the hysteresis; z is the hysteresis variable, determined by variables β and δ;
In this model, a simple hyperbolic tangent function (Figure 13) is used to describe the hysteresis loop of moment-angular velocity response of the MR pin joint. This model is able to keep simplicity and hence enhances computational efficiency.
C
θ
k
Hyperbolic hysteretic element
T0
-6 -4 -2 0 2 4 6
-1
-0.5
0
0.5
1
x
y=ta
nh(x
)
Fig. 12. Rotational hyperbolic hysteresis model Fig.13. Hyperbolic tangent function
-1 -0.5 0 0.5 1-5
-4
-3
-2
-1
0
1
2
3
4
5
originalincrease Cincrease Kincrease
-1 -0.5 0 0.5 1-3
-2
-1
0
1
2
3
4
originalincrease T0increase
increase
a) Effect of c, k and α on the hysteresis loop b) Effect of T0, β and δ on the hysteresis loopFig. 14. Relationship between main parameters and hysteresis loop
Figure 14 shows the relationship between the coefficients in the proposed model and the hysteresis loop. As z is responsible for the hysteresis loop, coefficients α, β and δ are the most important parameters determining the bases of the hysteresis loop. The scale factor α is responsible for the amplitude of the hysteresis loop along the y-axis. β defines the slope of the loop when it crosses zero velocity. It can clearly be observed from Figure 13 that the hyperbolic tangent function y=tanh(x) reaches its top and bottom limits
12

when |x| exceeds 2. While, when |x| increases in the area of |x|<2, hyperbolic tangent function rapidly approaches saturation. δ defines the width of the loop in the middle without changing the sharpness of the two ends of the loop. Hence, α, β and δ are the major contributors to the features of the hysteresis loop.
The modification of the hysteresis loop, such as the sharpness and slope of the ends and the offset of the loop, will be altered by tuning the other three coefficients, c, k and T0. It can be seen that increasing c will heighten the left and right end of the hysteresis loop. Viscous coefficient c is another coefficient representing the slope of the hysteresis loop. Stiffness coefficient k contributes to the opening of the hysteresis loop. Increasing k will enhance the opening of hysteresis loop not only near zero velocity but also at the two ends of the loop. T0 corresponds to the y-axis offset of the moment-angular velocity hysteresis. By adjusting the coefficients, the proposed model can reproduce variety of hysteretic plots of the nonlinear devices.
6. Parameter identification of the proposed model
In this section, a parameter identification scheme is briefly introduced. Firstly, estimations on parameters, T0 and α, are accomplished based on data observation in order to reduce the complexity during parameter identification. Least squares optimisation is used to identify the precise values of the model parameters.
6.1 Estimation of T0
The parameter T0 can be easily determined since it represents the centre along the y-axis of the hysteretic curve. Hence,
T 0=[ max (T )+min (T ) ]/2 (6)
6.2 Estimation of α
The estimation of α is based on the characteristic of hyperbolic tangent function, as shown in Figure 13. It shows that the limit of the hyperbolic tangent function is ±1. Hence, can be easily estimated as the amplifying factor of the hyperbolic tangent function tanh(x),
α=[|max(T )|+|min(T )|]/2 (7)
Specially, in the case of I=0A, it is expected that the moment due to friction contribute significantly to the total moment. Here
α 0=max (T ) (8)
It should be noted that Eqs.6-8 provide the estimation of α and T0 rather than the exact value of those coefficients. These estimations will greatly improve the efficiency of the parameter identification process.
6.3 Parameter identification of proposed hyperbolic hysteresis model
13

-0.6 -0.4 -0.2 0 0.2 0.4 0.6-15
-10
-5
0
5
10
15
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
Test DataProposed Model
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-15
-10
-5
0
5
10
15
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
Test DataProposed Model
a) Amplitude=7.06 mm (θ=2o) b) Amplitude=17.65 mm (θ=5o)
Fig. 15. Comparison between the experimental data and the results from the analytical model under different loading
conditions (f=3.0Hz)
Based on the experimental data and preliminary estimation of the parameter, a least-squares optimisation technique is employed to determine appropriate parameters for the proposed analytical model. Figure 15 provides a comparison between the experimental data and the estimation from the proposed model when loading frequency is 3.0Hz. Figure 15a) represents the case when the displacement amplitude of the loading is small (i.e. 7.06 mm) while Figure 15b) represents the case when there was a large displacement, i.e. 17.65 mm. As seen from the results, the proposed model is able to provide excellent agreement with experimental data. 6.4 Performance evaluation of the proposed model
Figure 16 shows the time domain behaviour of the MR pin when the amplitude of the sinusoidal motion is 28.20 mm. The proposed model predicts the behaviour of the MR pin joint very well in almost all regions, including the roll-off at low velocities. An interesting behaviour of the MR pin joint appears in the area at high velocities. The output moment of the MR pin reaches saturation after the MR pin reaches half-way of the sinusoidal motion in one direction. It can also be seen in the moment-angular displacement plot in Figure 16. Furthermore, a rapid increase of the measured moment appears near zero velocity. In this area, the measured moment has a rapid increase of positive value when the acceleration is negative and the displacement reaches maximum, and a rapid increase of negative value when the acceleration is positive and the displacement reaches minimum. Then the measured moment keeps increasing or decreasing until it enters the post-yield region. This may be due to the high acceleration, either positive or negative, occurring when the shake table changes its moving direction. The proposed model could not fully capture the rapid increase and the post-yield saturation when the amplitude of the sinusoidal motion loading is large.
14

0 0.5 1 1.5 2 2.5 3-15
-10
-5
0
5
10
15
Time (s)
Mom
ent (
N.m
)
sinusoidal excitation
-0.1 -0.05 0 0.05 0.1 0.15
-10
-5
0
5
10
Angle (Rad)
Mom
ent (
N.m
)
-0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
-10
-5
0
5
10
Angular Velocity (Rad/S)
Mom
ent (
N.m
)
Test Data:I=1.5AProposed Model
Fig. 16. Comparison between test data and the proposed hyperbolic hysteresis model (Amplitude=28.2 mm)
0 0.5 1 1.5 2 2.5 3-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time (s)
Mom
ent (
N.m
)
sinusoidal excitation
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Angle (Rad)
Mom
ent (
N.m
)
-0.025 -0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Angular velocity (Rad/S)
Mom
ent (
N.m
)
Test Data:I=0AProposed Model
Fig. 17. Comparison between test data and proposed hyperbolic hysteresis model (Amplitude=7.06 mm)
15

Figures 17 and 18 show the comparisons between test data and the predicted responses when no current was applied to the coil. In Figure 17, the prediction from the proposed model provides acceptable agreement with the test data. However, in the roll-off region at low velocities, the proposed model cannot capture the narrowing shape when the angular velocities approach zero velocity. When large loading amplitudes combined with zero input current, the MR pin joint exhibits a complex moment-angular velocity behaviour, as shown in Figure 18. A crossover appears in two branches of the hysteresis loop. In the area of low velocities, both roll-off and crossover behaviours appear. The predicted behaviour of the MR pin by the proposed model is well-aligned with that exhibited in the experiment. It is able to capture the roll-off and cross-over in an acceptable manner. In the absence of the magnetic field, the hysteretic behaviour is no longer dominated by MR effects (can be modelled as Coulomb friction [32-33]). Instead, the other frictions play an important role in this circumstance. The other frictions mainly consist of two categories: 1) mechanical friction between the rotational shaft and the sealing components; and 2) the viscosity friction [32-33] induced by the interaction between the MR fluids and the rotational plate. In general when MR pin is magnetised, Coulomb friction [32-33] due to the MR effect contributes the majority of the output moment and the other frictions become insignificant.
0 0.5 1 1.5 2 2.5 3-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time (s)
Mom
ent (
N.m
)
-0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Angle (Rad)
Mom
ent (
N.m
)
-0.06 -0.04 -0.02 0 0.02 0.04 0.06-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Angle velocity (Rad/S)
Mom
ent (
N.m
)
Test Data:I=0AProposed Model
Fig. 18. Comparison between test data and proposed hyperbolic hysteresis model (Amplitude=28.20 mm)
6.5 Model accuracy
In order to check the efficiency of the proposed model, a quantitative study is conducted to evaluate the
16

error between the experimental data and the proposed model. Here, define the error as:
E( i , a , f )= 1N ∑
j=1
N
[T data( i , j , a , f )−T mod el( i , j , a , f ) ]2 (9)
Where, Tdata and Tmodel are the experimental moment data and the predicted behaviour of MR pin joint respectively; i refers to the applied current to the MR pin joint; j is the jth data set in the data array; a and f are the amplitude and frequency of the loading excitation; N is the length of the data array.
Table 2-5 are the calculated errors when the excitation frequencies are 0.1Hz, 0.5Hz, 1.0Hz and 2.0Hz respectively. Note that there are only two valid data for the case when the frequency is 3.0Hz and hence these data are not considered in this analysis. Generally, the proposed model has better alignment with the experimental data at high frequency. It is clear that the proposed model has the better performance on stimulating the behaviours of MR pin joint when the driving currents are lower and the amplitudes of the loading movements are smaller. For example, for all cases when I=0A, the calculated errors are far smaller than those in other cases. Increasing the driving frequencies will decrease the difference between the proposed model and the experimental data. Despite the diversity of the error for individual instance, the proposed model shows excellent agreement with the experimental data and is able to portray the complex behaviour of the MR pin joint successfully. Moreover, by introducing the hyperbolic function to simulate the hysteresis of the MR device, the proposed model will greatly reduce the computational time in the control design and real-time control implementation.
Table 2. Errors for the proposed model (f=0.1Hz)
I=0A I=0.5A I=1.0A I=1.5A I=2.0A Average Error
A=7.06mm 0.0019 0.0059 0.0322 0.0545 0.0678 0.032460
A=17.65mm 0.0035 0.0086 0.0446 0.1120 0.2038 0.074500
A=28.2mm 0.0031 0.0179 0.0945 0.2077 0.3342 0.131480
A=35.2mm 0.0017 0.0199 0.0940 0.2145 0.3514 0.136300
Average
Error0.002550
0.01307
50.066325
0.14717
50.239300
0.093685
Table 3. Errors for the proposed model (f=0.5Hz)
I=0A I=0.5A I=1.0A I=1.5A I=2.0A Average Error
A=7.06mm 0.0015 0.0038 0.0209 0.0380 0.0566 0.024160
A=17.65mm 0.0009 0.0068 0.0478 0.1110 0.1792 0.069140
A=28.2mm 0.0007 0.0125 0.0872 0.2079 0.3423 0.130120
A=35.2mm 0.0032 0.0151 0.1401 0.2655 0.4306 0.170900
Average
Error0.001575
0.00955
00.074000
0.15560
00.252175
0.098580
Table 4. Errors for the proposed model (f=1.0Hz)
I=0A I=0.5A I=1.0A I=1.5A I=2.0A Average Error
A=7.06mm 0.0005 0.0025 0.0157 0.0267 0.0363 0.016340
A=17.65mm 0.0002 0.0042 0.0337 0.0901 0.1663 0.058900
A=28.2mm 0.0001 0.0077 0.0734 0.1927 0.3281 0.120400
17

A=35.2mm 0.0001 0.0093 0.0833 0.2153 0.4713 0.155860
Average
Error0.000225
0.00592
50.051525
0.13120
00.250500
0.087875
Table 5. Errors for the proposed model (f=2.0Hz)
I=0A I=0.5A I=1.0A I=1.5A I=2.0A Average Error
A=7.06mm 0.0002 0.0022 0.0143 0.0236 0.0296 0.013980
A=17.65mm 0.0003 0.0035 0.0291 0.0721 0.1367 0.048340
A=28.2mm 0.0002 0.0065 0.0648 0.1830 0.3109 0.113080
A=35.2mm 0.0007 0.0055 0.0715 0.1916 0.3196 0.117780
Average Error 0.000350 0.0044250.04492
50.117575 0.199200
0.073295
7. Discussions on current, amplitude and frequency dependence
Rheological studies have indicated that the response of MR fluid is dependent on applied field strength, frequency and amplitude of the excitation[21-24]. It was also reported that the performances of MR device, such as MR damper, are also field, frequency and amplitude dependent[25-26]. Current dependence of MR devices has been extensively investigated and was considered in the correlation of model parameters and applied currents[8, 10-11, 28-29]. However, the influence of driving frequency on the model parameter is yet to be explored. In previous sections, the performance of MR pin in most-concerned frequency range in civil engineering application was recorded and evaluated. Model parameters for all loading conditions and applied current levels were obtained. In this section, current, amplitude and frequency dependence of the model parameters will be reviewed to provide knowledge for the development of a generalised dynamic model of MR pin. Of particular concern in this discussion are the dependences of the parameters in most dangerous frequency range for civil structures, 1-3Hz.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
Coil Current
Coe
ffici
ent C
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-30
-20
-10
0
10
20
30
40
Coil Current
Coe
ffici
ent K
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
a) b)
18

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
2
4
6
8
10
12
Coil Current
Coe
ffici
ent
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.18
-0.17
-0.16
-0.15
-0.14
-0.13
-0.12
-0.11
-0.1
Coil Current
Coe
ffici
ent T
0
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
c) d)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
50
100
150
200
250
300
350
400
450
500
Coil Current
Coe
ffici
ent
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Coil Current
Coe
ffici
ent
f=0.1 Hzf=0.5 Hzf=1.0 Hzf=2.0 Hzf=3.0 Hz
e) f)
Fig.19. Variations of 6 model parameters with coil current for 17.65mm loading excitations at various frequencies (0.1, 0.5,
1.0, 2.0 and 3.0Hz)
Figure 19 shows the variations of 6 parameters in the proposed model, c, k, α, T0, β and δ, with different coil current for 17.65mm loading excitations at various frequencies. The identified parameters at a single driving frequency are labelled with same tag in the figure. It is obvious that α is the parameter that is only dependent on the applied current under given excitation amplitude, no matter what the driving frequencies are, as shown in Figure 19c). Further evidence in Figure 21 indicates that at a fixed driving frequency, α is depend on applied current only, no matter what the excitation amplitudes are.
Other model parameters, however, seem to be related to both loading frequency and applied current, especially for the cases when the frequency is 0.1Hz and 0.5Hz respectively. If we exclude the parameters for those two cases, it is found that the parameters exhibit well-regulated trends, either staying nearly constant or monotonously increasing.
19

0 0.5 1 1.5 2 2.5 30
10
20
30
40
50
60
Frequency (Hz)
Coe
ffici
ent C
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
40
Frequency (Hz)
Coe
ffici
ent K
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
a) b)
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
Frequency (Hz)
Coe
ffici
ent
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
0 0.5 1 1.5 2 2.5 3-0.18
-0.17
-0.16
-0.15
-0.14
-0.13
-0.12
-0.11
-0.1
Frequency (Hz)
Coe
ffici
ent T
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
c) d)
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
400
450
500
Frequency (Hz)
Coe
ffici
ent
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
0 0.5 1 1.5 2 2.5 30.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Frequency (Hz)
Coe
ffici
ent
I=0AI=0.5AI=1.0AI=1.5AI=2.0A
e) f)
Fig. 20. Variations of 6 model parameters with loading frequency for 17.65mm loading excitations at current levels (0, 0.5,
1.0,1.5 and 2.0 A)
The influence of driving frequency on the model parameters is illustrated in Figure 20 for 17.65mm loading excitation at five current levels, 0, 0.5, 1.0, 1.5 and 2.0A. It can be seen that the damping coefficient c and
20

variable β for every current level exhibits an exponential decrease as the driving frequency is enhanced from 0.1Hz to 3.0Hz. Stiffness coefficient k shows a linear decrease when the driving frequency increases. The moment offset T0 shows a disorder for the frequency range. Variable δ shows an approximately linear decrease with the increase of frequency.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1
0
1
2
3
4
5
6
7
Coil Current
Coe
ffici
ent C
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-20
0
20
40
60
80
100
120
Coil Current
Coe
ffici
ent K
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
a) b)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
2
4
6
8
10
12
Coil Current
Coe
ffici
ent
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.16
-0.155
-0.15
-0.145
-0.14
-0.135
Coil Current
Coe
ffici
ent T
0
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
c) d)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 25
10
15
20
25
30
35
Coil Current
Coe
ffici
ent
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
Coil Current
Coe
ffici
ent
Amplitude=7.06mmAmplitude=17.65mmAmplitude=28.2mmAmplitude=35.2mm
e) f)
Fig. 21. Variations of 6 model parameters with coil current for 1.0Hz loading excitations at various amplitude (7.06, 17.65,
28.2 and 35.2mm)
21

Given the fact that for almost all values of T0 varies from -0.145 to -0.175Nm, it is reasonable to assume that the moment offset is a constant value for all 17.65mm excitations. If we look at the data for the frequency range of 1-3Hz, it is reasonable to treat four parameters, c, α, T0 and δ, as frequency-independent variables. Earthquake frequency content is complex at any time within the time history. For seismic protection, it is not practical to obtain a certain frequency for online identification of the model of MR pin at a given time instance. Hence, it is receivable to omit the influence of frequency during the modelling of MR devices for civil engineering application.
To analyse the current and amplitude dependence of the proposed model, the relationship between the model parameters and applied current and amplitude of excitation is illustrated in Figure 21. As seen from Figure 21, amplifying variable β is amplitude-dependent only. Other parameters, including c, k, α, T0 and δ, apparently display linear relationships with applied current and amplitude of the excitation. These linear relationships will facilitate the further implementation of the proposed model on the online identification and structural control for the protection of civil structure utilising MR pins.
8. Conclusions
In this paper, a new structural member, a MR pin joint, was brought forward and an experimental investigation was carried out to examine and characterise the dynamic behaviours of the MR pin joint under various sinusoidal excitations and operating current levels. Results showed that MR pin, unlike other MR devices, exhibited unique performances, including the “flat-ends” and “peanut-shape” hysteretic loop for the specific situations. A computationally-efficient hyperbolic hysteresis model was proposed to predict the nonlinear hysteretic behaviours of the MR pin joint. In this model, a hyperbolic tangent function is used to portray the complex behaviour of the MR pin joint. Discussions on the influences of model parameters on the hysteresis were provided. A detailed parameter identification procedure was employed to determine the coefficients in the proposed hysteresis model. Comparison of experimental results and predictions obtained from the new model indicated that the proposed model is a good candidate in presenting the complex behaviour of the MR pin joint. For its use in civil engineering application, investigations were explored to identify the dependences of the model on applied current, amplitude and frequency of the loading excitations. It was suggested that the performance is frequency-independent and can be described as linear relationship with applied current level and amplitude of the excitations.
REFERENCES1. T.T. Soong, “Active structural Control: Theory and Practice”, Longman Scientific and Technical, Essex, England, 1990.
2. Y. Fujino, T.T. Soong, and B.F. Spencer, “Structural Control: Basic Concepts and Applications,” Proc. ASCE Structures
Congress XIV, Chicago, Illinois, 1996, pp. 1277-1278.
3. M. R. Jolly, J. W. Bender and J. D. Carlson. “Properties and applications of commercial magnetorheological fluids”. In:
Proceedings of the SPIE 5th International Symposium on Smart Structures and Materials, San Diego, CA, USA, 1998,
262-275.
4. J. D. Carlson, D. M. Catanzarite and K.A.S. Clair. “Commercial magnetorheological fluid devices”. International
Journal of Modern Physics B, 1996, 10(23/24):2857 – 2865.
5. D. W. Felt, M. Hagenbuchle, J. Liu and J. Richard. “Rheology of a magnetorheological Fluid”. Journal of Intelligent
Material Systems and Structures, 1996, 7(5):589-593.
22

6. G. W. Housner L. A. Bergman, T. K. Caughey, et.al. “Structural Control: Past, Present, and Future”, Journal of
Engineering Mechanics, Vol. 123, No. 9, September 1997, pp. 897-971.
7. Y. L. Xu, W. L. Qu, and J.M. Ko, “Seismic response control of frame structures using magnetorheological/
electrorheological dampers,’ Earthquake Engineering and Structural Dynamics, Vol. 29, 2000, pp.557-575.
8. S. J. Dyke. “Acceleration feedback control strategies for active and semi-active control systems: modelling, algorithm,
development and experimental verification”. PhD Dissertation, Department of Civil Engineering and Geological
Sciences, University of Notre Dame, Indiana, USA, July 1996.
9. J. Wang and Y. Li, “Dynamic Simulation and Test Verification of MR Shock Absorber under Impact Load”, Journal of
Intelligent Material Systems and Structures, 17, 2006, pp. 309-314.
10. S. J. Dyke, B. F. Spencer, M. K. Sain and J. D. Carlson, “Modeling and control of magnetorheological dampers for
seismic response reduction”, Smart Materials and Structures, 5(5), 1996, pp.565-575
11. G. Yang, B. F. Spencer, H. H. Jung and J. D. Carlson, “Dynamic modelling of large-scale magnetorheological damper
system for civil engineering application”, Journal of Engineering Mechanics, 2004, 130, pp.1107-1114.
12. L. Dong, Z.G. Ying and W.Q. Zhu, “Stochastic Optimal Semi-Active Control of Nonlinear Systems by Using MR
Dampers”, Advances in Structural Engineering, Volume 7, Number 6, December 2004, pp. 485-494.
13. Y. Bao, C. Huang, D. Zhou, Y. J. Zhao, “Semi-Active Direct Velocity Control Method of Dynamic Response of Spatial
Reticulated Structures Based on MR Dampers”, Advances in Structural Engineering, Volume 12, Number 4, August
2009, pp. 547-558.
14. G. Pan, H. Matsuhisa and Y. Honda, “Analytical model of a magnetorheological damper and its application to vibration
control”, IEEE 26th Annual Conference of Industrial Electronics Society, Nagoya, Japan, 22 nd -28th Oct, 2000, Vol. 3, pp.
1850-1855.
15. R. Stanway, J. L. Sproston and N. G. Stevens, “Non-linear modelling of an electro-rheological vibration damper”,
Journal of Electrostatics, 20, 1987, pp.167-184.
16. S. F. Masri, R. Kumar and R. C. Ehrgott, “Modeling and control of an electrorheological device for structural control
applications”, Smart Materials and Structures, 4(1A), 1995, pp.A121-A131
17. N. M. Wereley, L. Pang and G. M. Kamath, “Idealized hysteresis modelling of electrorheological and magnetorheological
dampers”, Journal of Intelligent Material Systems and Structures, 9, 1998, pp.642-649.
18. G. M. Kamath and N. M. Wereley, “A nonlinear viscoelastic-plastic model for electrorheological fluids”, Smart Materials
and Structures, 6(3), 1997, pp.351-359.
19. B. F. Spencer, S. J. Dyke, M. K. Sain and J. D. Carlson, “Phenomenological model of a magnetorheological damper”,
Journal of Engineering Mechanics, Vol. 123, No. 3, March 1997, pp. 230-238
20. R. C. Ehrgott and S. F. Masri, “ Modeling of the oscillatory dynamic behaviour of electrorheological materials in shear”,
Smart Materials and Structures, 1(4), 1992, pp.275-285
21. D. R. Gamota and F. E. Filisko, “Dynamic mechanical studies of electrorheological materials: moderate frequencies”,
Journal of Rheology, 35(3), 1991,pp.399-425
22. D. R. Gamota and F. E. Filisko, “High frequency dynamic mechanical study of an aluminosilicate electrorheological
material”, Journal of Rheology, 35(7), 1991, pp.1411-1425.
23. T. C. B. McLeish, T. Jordan and M. T. Shaw, “Viscoelastic response electrorheological fluids. I. Frequency dependence”,
Journal of Rheology, 35(3), 1991, pp.427-448
24. T. Jordan, M. T. Shaw and T. C. B. McLeish, “Viscoelastic response electrorheological fluids. II. Field strength and strain
dependence”, Journal of Rheology, 36(3), pp.441-463.
23

25. F. Gandhi and W. A. Bullough, “On the Phenomenological Modeling of Electrorheological and Magnetorheological Fluid
Preyield Behavior”, Journal of Intelligent Material Systems and Structures, 16,( 3), 2005, 237-248
26. W. H. Li, H. J. Du, G. Chen, S.H. Yeo and N.Q. Guo, “Nonlinear viscoelastic properties of MR fluids under large-
amplitude-oscillatory-shear”, Rheologica Acta, 42(3), 2003, pp.280-286.
27. E. R. Wang, X. Q. Ma, S. Rakhela and C. Y. Su, “Modelling the hysteretic characteristics of a magnetorheological fluid
damper”, Proceedings of the Institution of Mechanical Engineers. Part D, Journal of automobile engineering , 217(7),
2003, pp. 537-550
28. A. Dominguez, R. Sedaghati and I Stiharu, “A new dynamic hysteresis model for magnetorheological dampers”, Smart
Materials and Structures, 15(5), 2006, pp. 1179-1189.
29. S. F. Ali and A. Ramaswamy, “Testing and modelling of MR damper and its application to SDOF systems using integral
backstepping technique”, Journal of Dynamic Systems, Measurement, and Control, 131(2), 2009, pp.021009.1-11
30. J. Widjaja, B. Samali, and J. Li, “The Use of Displacement Threshold for Switching Frequency Strategy for Structural
Vibration Mitigation”, Journal of Mechanical Science and Technology, 21, 2007, pp. 865-869.
31. J. Widjaja, B. Samali, J. Li, U. Dackermann and P. Brown, “Amplitude frequency characteristics of smart pin-frame
system”. Proceedings of the 11th Asia–Pacific Vibration Conference, 23-25 November, Langkawi, pp.228-233. Malaysia:
Institute of Noise & Vibration, University of Technology Malaysia.
32. Y. Li, J. Li, B. Samali, J. Wang. “Theoretical and Experimental Studies on Semi-Active Smart Pin Joint”. Proceeding of
20th Australasian Conference on the Mechanics of Structures and Materials, Toowoomba, Queensland, Australia, 2-5
December 2008, pp:723-728.
33. Y. Li, J. Li, B. Samali, J. Wang. “Design Considerations and Experimental Studies on Semi-Active Smart Pin Joint”.
Frontier of Mechanical Engineering in China, 4(4), 2009, pp.363-370.
34. Y. Li, J. Li and B. Samali, “Design of New Generation Magnetorheological Pins”, 21st Australasian Conference on the
Mechanics of Structures and Materials, Victoria University (VU), Melbourne, Australia, 7-10 December, 2010, pp. 807-
812.
35. Y. Li, J. Li and B. Samali, “Dynamic Performance of A Novel Magnetorheological Pin Joint”, Journal of System Design
and Dynamics, 2011, vol. 5, no. 5, pp. 706-715.
36. G. M. Kamath and N. M. Wereley, “Nonlinear viscoelastic-plastic mechanism-based model of an electrorheological
damper”, Journal of Guidance, Control, and Dynamics, Vol. 20, No. 6, 1997, pp.1125-1132
37. N. M. Kwok, Q. P. Ha, T.H. Nguyen, J. Li and B. Samali, “A novel hysteretic model for magnetorheological fluid
dampers and parameter identification using particle swarm optimization,” Sensors & Actuators: A. Physical, Vol. 132,
No. 2, Nov. 2006, pp. 441-451.
38. R. Jimenez and L. Alvarez-Icaza, “LuGre friction model for a magnetorheological damper”, Structural Control and
Health Monitoring, 2005, Vol.12, pp.91–116
39. F. Yang, R. Sedaghati and E. Esmailzadeh, “Development of LuGre friction model for large-scale magnetorheological
fluid dampers”, Journal of Intelligent Material Systems and Structures, Vol. 20, No. 8, 2009, pp.923-937.
24