Human Exploration of Mars: The Reference Mission of...
237
Human Exploration of Mars: Stephen J. Hoffman, Editor David I. Kaplan, Editor Lyndon B. Johnson Space Center Houston, Texas July 1997 NASA Special Publication 6107 The Reference Mission of the NASA Mars Exploration Study Team
Transcript of Human Exploration of Mars: The Reference Mission of...
Human Exploration of Mars:
Stephen J. Hoffman, EditorDavid I. Kaplan, Editor
Lyndon B. Johnson Space CenterHouston, Texas
July 1997
NASA Special Publication 6107
The Reference Mission of theNASA Mars Exploration
Study Team

Human Exploration of Mars:
The Reference Mission of the NASA Mars Exploration Study Team
Stephen J. Hoffman, EditorScience Applications International CorporationHouston, Texas
David I. Kaplan, EditorLyndon B. Johnson Space CenterHouston, Texas
July 1997
NASA Special Publication 6107

This publication is available from the NASA Center for AeroSpace Information, 800 Elkridge Landing Road, Linthicum Heights,MD 21090-2934 (301) 621-0390.

III
Foreword
Mars has long beckoned to humankindfrom its travels high in the night sky. Theancients assumed this rust-red wanderer wasthe god of war and christened it with thename we still use today.
Early explorers armed with newlyinvented telescopes discovered that thisplanet exhibited seasonal changes in color,was subjected to dust storms that encircledthe globe, and may have even had channelsthat crisscrossed its surface.
Recent explorers, using roboticsurrogates to extend their reach, havediscovered that Mars is even more complexand fascinating—a planet peppered withcraters, cut by canyons deep enough toswallow the Earth’s Grand Canyon, andshouldering the largest known volcano in thesolar system. They found intriguing evidencethat water played an important role on Marswith channels that bear a strikingresemblance to stream beds and clouds ofcrystalline ice that still traverse its red sky.But they also found that Mars was cold anddry, and believed to be devoid of life.
Now present day explorers haveannounced that pieces of Mars have arrivedon Earth as meteorites, and that these bits ofthe red planet contain evidence pointing tothe possible existence of life early in Marshistory. This has resulted in renewed public
interest in this fellow traveler of the solarsystem, adding impetus for exploration.
Over the past several years studieshave been conducted on various approachesto exploring Earth’s sister planet Mars. Muchhas been learned, and each study brings uscloser to realizing the goal of sending humansto conduct science on the Red Planet andexplore its mysteries. The approach describedin this publication represents a culmination ofthese efforts but should not be considered thefinal solution. It is our intent that thisdocument serve as a reference from which wecan continuously compare and contrast othernew innovative approaches to achieve ourlong-term goal. A key element of futureimprovements to this document will be theincorporation of an integrated robotic/humanexploration strategy currently underdevelopment.
We will continue to develop alternativeapproaches, technologies, precursor missions,and flight demonstrations that collectivelymove us forward. Inputs have been, and willalways be, encouraged from all sources—NASA centers, industry, researchorganizations, entrepreneurs, governmentagencies, international partners, and thepublic at large—which will improve ourunderstanding and current planning. Weplan to use the results of these assessments toshape our investments in technology, and to
IV
look for high leverage, innovative, break-through approaches to the most cost effectiveexploration. These data will also help usunderstand the required infrastructure, aswell as provide important insights into howwe can use the International Space Station tovalidate key assumptions and technologies.
To achieve our goal, we mustfundamentally change the way in which weexplore with both humans and robots. We
must search for alternatives to substantiallyreduce the cost of exploration, whileincreasing the inherent value to humankind.This Reference Mission provides a viablestarting point for NASA’s continuing effortsto develop the technologies and systems, aswell as the international partnerships, neededfor the grand adventure of sending humans toexplore another planet in our solar system—one that may have once, and may yet again,harbor life.
V
AcknowledgmentsSending people to Mars has been a
long-held dream of humankind, and manyhave approached the task of turning thedream into reality. This document is anotherchapter in the ongoing process of meldingnew and existing technologies, practicaloperations, fiscal reality, and common senseinto a feasible and viable human mission toMars. However, this is not the last chapter inthe process, but marks a snapshot in time that
will be added to and improved upon byothers in the future. This report has benefitedfrom the contributions and advice of manyindividuals from the government and privatesectors. The individuals listed on thefollowing page assisted in preparing theconcepts described in this report and incompiling the words, images, and data usedfor that description.
Stephen J. Hoffman
David I. Kaplan
VI
Contributing Authors
Ames Research Center:Roger ArnoDr. Geoff BriggsDr. Yvonne ClearwaterDr. Marc CohenAndy Gonzales
Johnson Space Center:Dr. Michael DukeDavid KaplanCatherine LarsonDavid WeaverLaurie Weaver
Lewis Research Center:Robert CataldoDr. Stanley Borowski
SAIC:Dr. Stephen HoffmanPaul Phillips
Study Team Members
Ames Research Center:Dr. Geoff Briggs (co-lead)
Johnson Space Center:Jeri BrownNancy Ann BuddenBeth CaplanJohn ConnollyDr. Michael Duke (co-lead)Dallas EvansDr. Steve HawleyKent JoostenDavid KaplanDarrell KendrickBarbara PearsonBarney RobertsEd SvrcekDavid Weaver
Lewis Research Center:Dr. Stanley BorowskiRobert Cataldo
Los Alamos National Laboratory:Dr. Paul Keaton
Marshall Space Flight Center:William Huber
General Contributors
Ames Research Center:Betsy DunskyPaul EspinosaVladimir GarinLynn HarperButler HineLarry LemkeDoug O’HandleyNelson SchlaterMichael Sims
Boeing:Brent Sherwood
Lewis Research Center:Dr. Stanley Borowski
Rockwell International:Robert RaaschLisa Rockoff
Reviewers and Commenters
Johnson Space Center:Nancy Ann BuddenJohn Connolly
Other Support and Contributions
Ames Research Center:Dr. Chris McKayJeff MooreDr. Carol StokerAnthony Gross
Editorial and Graphics Support
J. Frassanito and Associates:J. Frassanito
SAIC:R. Patrick Rawlings
VII
There is a set of supplemental technical reports whichprovide greater depth into many of the design features of theMars Reference Mission than is given in section 3 of thisdocument. Had those papers been included as appendices, thesize of this document would have greatly expanded.Consequently, we decided to make those supplementalmaterials available through the world wide web. We intend topost new materials as to the web as they are produced and hopeto maintain a site with the latest information which describeskey technologies and design features of a human mission toMars.
The site for the Mars Reference Mission is
http://www_sn.jsc.nasa.gov/marsref/contents.html

VIII
IX
ContentsSection Page
Acronyms .................................................................................................................................................... xv
1. OVERVIEW AND EXECUTIVE SUMMARY ..................................................................................... 1-11.1 INTRODUCTION ..................................................................................................................................... 1-31.2 BACKGROUND........................................................................................................................................ 1-51.3 REFERENCE MISSION EXECUTIVE SUMMARY .............................................................................. 1-6
1.3.1 Objectives ...................................................................................................................................... 1-61.3.2 Groundrules and Assumptions .................................................................................................. 1-71.3.3 Mission and Systems ................................................................................................................... 1-8
1.3.3.1 Mission Design ............................................................................................................. 1-81.3.3.2 In Situ Resource Production ..................................................................................... 1-161.3.3.3 Flight Crew ................................................................................................................. 1-161.3.3.4 Robotic Precursors ..................................................................................................... 1-171.3.3.5 Launch Systems .......................................................................................................... 1-181.3.3.6 Interplanetary Transportation Systems .................................................................. 1-181.3.3.7 Surface Systems .......................................................................................................... 1-221.3.3.8 Operations ................................................................................................................... 1-241.3.3.9 Mission and Systems Summary ............................................................................... 1-27
1.4 TESTING PRINCIPAL ASSUMPTIONS AND CHOICES ................................................................ 1-281.4.1 Robust Surface Infrastructure .................................................................................. 1-281.4.2 Split Mission Strategy ................................................................................................ 1-281.4.3 Nuclear Thermal Propulsion .................................................................................... 1-301.4.4 In Situ Resource Utilization ...................................................................................... 1-301.4.5 Common Habitat Design .......................................................................................... 1-311.4.6 Nuclear Surface Power .............................................................................................. 1-311.4.7 Abort to the Surface ................................................................................................... 1-321.4.8 Design for the Most Difficult Opportunity ............................................................ 1-33
1.5 CONCLUSIONS AND RECOMMENDATIONS ............................................................................... 1-331.5.1 Mission and Systems ................................................................................................. 1-331.5.2 Technology Development ......................................................................................... 1-341.5.3 Environmental Protection ......................................................................................... 1-371.5.4 Program Cost .............................................................................................................. 1-381.5.5 International Participation ........................................................................................ 1-391.5.6 Program Management and Organization ............................................................... 1-41
1.6 REFERENCES .......................................................................................................................................... 1-44
X
Section Page
2. SCIENCE AND EXPLORATION RATIONALE ................................................................................ 2-12.1 INTRODUCTION ..................................................................................................................................... 2-32.2 THE “WHY MARS” WORKSHOP ......................................................................................................... 2-32.3 SCIENCE RATIONALE ........................................................................................................................... 2-62.4 EXPLORATION RATIONALE .............................................................................................................. 2-13
2.4.1 Inhabiting Another Planet ......................................................................................................... 2-132.4.2 International Cooperation ......................................................................................................... 2-152.4.3 Technological Advancement ..................................................................................................... 2-162.4.4 Inspiration ................................................................................................................................... 2-182.4.5 Investment ................................................................................................................................... 2-19
2.5 WHY NOT MARS? ................................................................................................................................. 2-192.5.1 Human Performance.................................................................................................................. 2-192.5.2 System Reliability and Lifetime ............................................................................................... 2-212.5.3 Political Viability and Social Concerns ................................................................................... 2-22
2.6 SUMMARY .............................................................................................................................................. 2-232.7 REFERENCES .......................................................................................................................................... 2-23
3. MISSION AND SYSTEM OVERVIEW ............................................................................................... 3-13.1 INTRODUCTION ..................................................................................................................................... 3-3
3.1.1 Mission Objectives ....................................................................................................................... 3-33.1.2 Surface Mission Implementation Requirements ...................................................................... 3-4
3.1.2.1 Conduct Human Missions to Mars ........................................................................... 3-43.1.2.2 Conduct Applied Science Research ........................................................................... 3-53.1.2.3 Conduct Basic Science Research ................................................................................ 3-63.1.2.4 Surface Operations Philosophy.................................................................................. 3-7
3.1.3 Groundrules and Assumptions ................................................................................................. 3-113.2 RISKS AND RISK MITIGATION STRATEGY .................................................................................... 3-12
3.2.1 Risks to Human Life .................................................................................................................. 3-133.2.2 Risks to Mission Success ........................................................................................................... 3-143.2.3 Risks to Program Success .......................................................................................................... 3-143.2.4 Risk Mitigation Strategy ............................................................................................................ 3-14
3.3 FLIGHT CREW ....................................................................................................................................... 3-163.3.1 Crew Composition ..................................................................................................................... 3-163.3.2 Crew Systems Requirements .................................................................................................... 3-20
3.4 MISSION OPERATIONS ....................................................................................................................... 3-213.4.1 Training Guidelines .................................................................................................................... 3-223.4.2 Science and Exploration ............................................................................................................ 3-243.4.3 System Operations and Maintenance ...................................................................................... 3-243.4.4 Programmatic Activities ............................................................................................................ 3-253.4.5 Activity Planning ....................................................................................................................... 3-26
3.4.5.1 Pre-Launch Phase ....................................................................................................... 3-273.4.5.2 Earth Launch Phase ................................................................................................... 3-283.4.5.3 Trans-Mars Phase ....................................................................................................... 3-293.4.5.4 Mars Landing Phase .................................................................................................. 3-303.4.5.5 Mars Surface Phase .................................................................................................... 3-313.4.5.6 Mars Launch Phase .................................................................................................... 3-333.4.5.7 Trans Earth Phase ....................................................................................................... 3-343.4.5.8 Earth Entry and Landing .......................................................................................... 3-353.4.5.9 Post Landing ............................................................................................................... 3-35
XI
Section Page
3.5 MISSION DESIGN .................................................................................................................................. 3-363.5.1 Trajectory Options ...................................................................................................................... 3-363.5.2 Trajectory Selection Factors ...................................................................................................... 3-37
3.5.2.1 Satisfying Reference Mission Goals and Objectives ............................................. 3-383.5.2.2 Satisfying Reference Mission Risk Strategy ........................................................... 3-383.5.2.3 Satisfying Reference Mission Program Flexibility ................................................ 3-41
3.5.3 Mission Design Strategy ............................................................................................................ 3-423.5.3.1 Trajectory Type ........................................................................................................... 3-423.5.3.2 Split Mission Strategy ................................................................................................ 3-423.5.3.3 Aerocapture ................................................................................................................ 3-433.5.3.4 Surface Rendezvous................................................................................................... 3-433.5.3.5 Use of Indigenous Resources ................................................................................... 3-443.5.3.6 Mars Orbit Rendezvous and Direct Entry at Earth ............................................... 3-44
3.5.4 Mission Sequence ....................................................................................................................... 3-443.5.4.1 First Mission: 2007 Opportunity .............................................................................. 3-453.5.4.2 Second Mission: First Flight Crew, 2009 Opportunity .......................................... 3-463.5.4.3 Third Mission: Second Flight Crew, 2011 Opportunity ........................................ 3-543.5.4.4 Fourth Mission: Third Flight Crew, 2014 Opportunity ........................................ 3-553.5.4.5 Mission Summary ...................................................................................................... 3-59
3.6 SYSTEMS .................................................................................................................................................. 3-603.6.1 Operational Design Considerations ........................................................................................ 3-613.6.2 Launch Vehicles .......................................................................................................................... 3-623.6.3 Interplanetary Transportation .................................................................................................. 3-72
3.6.3.1 Trans-Mars Injection Stage........................................................................................ 3-723.6.3.2 Biconic Aeroshell ........................................................................................................ 3-733.6.3.3 Transit/Surface Habitat ............................................................................................ 3-773.6.3.4 Mars Surface Lander .................................................................................................. 3-793.6.3.5 Mars Ascent Vehicle ................................................................................................... 3-823.6.3.6 Earth-Return Vehicle .................................................................................................. 3-863.6.3.7 Interplanetary Transportation Power Systems ...................................................... 3-90
3.6.4 Surface Systems .......................................................................................................................... 3-953.6.4.1 Surface Habitat/Laboratory ..................................................................................... 3-953.6.4.2 Life Support System .................................................................................................. 3-973.6.4.3 In-Situ Resource Utilization.................................................................................... 3-1013.6.4.4 Surface Mobility ....................................................................................................... 3-1053.6.4.5 Extra Vehicular Activity Systems ............................................................................ 3-1103.6.4.6 Surface Power Systems ............................................................................................ 3-111
3.7 PRECURSORS ..................................................................................................................................... 3-1163.7.1 Current Robotic Program Plans .............................................................................................. 3-1163.7.2 Mars Sample Return With ISRU ............................................................................................. 3-1163.7.3 Human Exploration Precursor Needs .................................................................................... 3-1173.7.4 Autonomous Deployment of Surface and Orbital Elements .............................................. 3-117
3.8 GROUND SUPPORT AND FACILITIES OPERATIONS ................................................................. 3-1183.8.1 Systems Operations .................................................................................................................. 3-1203.8.2 Science Operations ................................................................................................................... 3-121
XII
Section Page
3.9 PROGRAMMATIC ISSUES ................................................................................................................. 3-1223.9.1 Cost Analysis ............................................................................................................................ 3-122
3.9.1.1 Organizational Culture and Cost ........................................................................... 3-1233.9.1.2 The Cost Model ........................................................................................................ 3-124
3.9.2 Management and Organizational Structure ......................................................................... 3-1323.9.3 Technology Development ....................................................................................................... 3-136
3.10 REFERENCES ........................................................................................................................................ 3-144
TABLES
Table Page
1-1 Pricipal Discriminators of Short- and Long-Stay Mission Scenarios .................................... 1-291-2 Key Elements of Lower-Cost Programs .................................................................................... 1-42
2-1 Mars Exploration Consultant Team............................................................................................. 2-42-2 Mars Study Team ........................................................................................................................... 2-5
3-1 Capabilities and Demonstrations for Surface Mission Activities ........................................... 3-53-2 Surface Mission Skills .................................................................................................................. 3-183-3 General Launch Manifest: 2007 Launch Opportunity ............................................................ 3-473-4 General Launch Manifest: 2009 Launch Opportunity ............................................................ 3-493-5 Surface Science Payload for First Flight Crew ......................................................................... 3-523-6 General Launch Manifest: 2011 Launch Opportunity ............................................................ 3-553-7 Surface Science Payload for Second Flight Crew .................................................................... 3-573-8 General Launch Manifest: 2014 Launch Opportunity ............................................................ 3-593-9 Surface Science Payload for Third Flight Crew ....................................................................... 3-603-10 Launch Vehicle Concepts for the Mars Reference Mission .................................................... 3-633-11 Mass Estimates for TMI Stage Alternatives ............................................................................. 3-753-12 Mass and Size Estimates for Biconic Aeroshell Family .......................................................... 3-773-13 Mars Transit/Surface Habitation Element ............................................................................... 3-823-14 Earth Return Habitation Element Mass Breakdown .............................................................. 3-923-15 Estimated Power Profile for Outbound and Return Transits ................................................ 3-933-16 30kWe Power System With Fuel Cells and Solar Arrays ........................................................ 3-963-17 5kWe Power System With Fuel Cells and Solar Arrays .......................................................... 3-963-18 Mars Surface Laboratory/Habitat Element Mass Breakdown .............................................. 3-983-19 LSS Mass, Volume, Power Comparison .................................................................................. 3-1003-20 Mass and Power Estimates for the First ISRU Plant ............................................................. 3-1053-21 Mass and Power Estimates for the Second ISRU Plant ........................................................ 3-1063-22 Characteristics for Fixed Surface Power System Options ..................................................... 3-1133-23 Rover Power System Characteristics ........................................................................................ 3-1153-24 Program Environment Effects on Program Management Style .......................................... 3-1263-25 A Comparison of Development Culture Parameters for Commercial
Aircraft and NASA Manned Programs................................................................................... 3-1273-26 Key Elements of Lower-Cost Programs .................................................................................. 3-1343-27 Dual Use Technologies: Propulsion ......................................................................................... 3-1393-28 Dual Use Technologies: Communications/Information Systems....................................... 3-139
XIII
Table Page
3-29 Dual Use Technologies: In Situ Resource Utilization............................................................ 3-1403-30 Dual Use Technologies: Surface Mobility - Suits ................................................................... 3-1413-31 Dual Use Technologies: Surface Mobility - Vehicles ............................................................. 3-1413-32 Dual Use Technologies: Human Support ............................................................................... 3-1423-33 Dual Use Technologies: Power ................................................................................................. 3-1423-34 Dual Use Technologies: Structures and Materials ................................................................. 3-1433-35 Dual Use Technologies: Science and Science Equipment ..................................................... 3-1433-36 Dual Use Technologies: Operations and Maintenance ......................................................... 3-144
FIGURES
Figure Page
1-1 Typical fast-transit trajectory ........................................................................................................ 1-91-2 Mars Reference Mission Sequence............................................................................................. 1-101-3 General sequence of events associated with first mission to Mars ........................................ 1-111-4 Possible time line for first Mars surface mission ..................................................................... 1-151-5 Reference Mars cargo and piloted vehicles .............................................................................. 1-201-6 Distribution of Reference Mission costs ................................................................................... 1-391-7 Relationship between program cost and program culture .................................................... 1-41
2-1 Orbital image taken by Mariner 4 (1965) .................................................................................... 2-72-2 Olympus Mons v (Mariner 9 image), the largest volcano in the solar system...................... 2-82-3 Across the middle is Valles Marineris, a huge canyon as long as the United States ............ 2-92-4 Dense tributary networks indicative of past presence of liquid water on Mars ................. 2-11
3-1 A regional map illustrating potential locations for a Mars outpost ....................................... 3-83-2 Typical short-stay mission profile .............................................................................................. 3-373-3 Typical long-stay mission profile ............................................................................................... 3-373-4 Fast-Transit mission profile ........................................................................................................ 3-383-5 Round-trip mission duration comparisons .............................................................................. 3-393-6 Microgravity comparisons for various mission classes .......................................................... 3-413-7 Mars reference mission sequence .............................................................................................. 3-453-8 Mars surface outpost after deployment of payloads from
first two cargo landers ................................................................................................................. 3-483-9 Mars surface outpost at the end of first flight crew’s stay ..................................................... 3-513-10 Possible surface mission time line ............................................................................................. 3-533-11 Mars surface outpost at the end of second flight crew’s stay ................................................ 3-563-12 Mars surface outpost at the end of third flight crew’s stay ................................................... 3-583-13 Mars Energia-derived HLLV with eight Zenit-type boosters ................................................ 3-643-14 STS External Tank-derived HLLV with seven LOX/RP boosters ......................................... 3-653-15 STS External Tank-derived HLLV with four strap-on boosters, each
having two F-1 engines ............................................................................................................... 3-673-16 Saturn V-derived Mars HLLV with F-1A/J-2S propulsion .................................................... 3-683-17 Saturn V-based Mars HLLV concepts ....................................................................................... 3-693-18 Energia launch vehicle adapted to Mars mission profile ....................................................... 3-70
XIV
Figure Page
3-19 Mars mission launch vehicle with two external tank boosters and kick stage ................... 3-713-20 Reference Mars cargo and piloted vehicles .............................................................................. 3-733-21 Biconic aeroshell dimensions for Mars lander and surface habitat modules ...................... 3-763-22 Transit habitat attached to International Space Station .......................................................... 3-783-23 The crew exercise facility component of the countermeasures system
designed to inhibit crew degradation from exposure to reducedgravity environments .................................................................................................................. 3-80
3-24 EVA suit storage locations are critical in a robust crew safety system ................................. 3-803-25 Conceptual Mars habitation module-wardroom design ........................................................ 3-813-26 Habitat and surface laboratory joined on Mars surface ......................................................... 3-833-27 Mars surface lander descending on parachutes ...................................................................... 3-843-28 Mars surface lander just prior to landing illustrating landing legs
and surface mobility system ....................................................................................................... 3-853-29 Mars surface lander and biconic aeroshell ............................................................................... 3-873-30 Crew ascent capsule just after launch from Mars surface ...................................................... 3-873-31 Methane/LOX ascent stage configuration2 ............................................................................. 3-883-32 ECCV returning to Earth on a steerable parafoil ..................................................................... 3-913-33 Solar array power source for interplanetary spacecraft ......................................................... 3-943-34 Nominal power profile for the transit/surface habitat .......................................................... 3-953-35 Hybrid LSS process distribution .............................................................................................. 3-1003-36 Schematic of the first ISRU plant ............................................................................................. 3-1043-37 Concepts for the unpressurized and automated surface rovers ......................................... 3-1083-38 Concept for the large pressurized surface rover ................................................................... 3-1093-39 Conceptual airlock and EVA suit maintenance facility ......................................................... 3-1113-40 Mars surface power profile ........................................................................................................ 3-1123-41 The relative cost of programs using different management approaches ........................... 3-1253-42 A comparison of the relative costs for Reference Mission elements ................................... 3-129
XV
AcronymsAMCM Advanced Missions Cost Model
COSPAR Committee on Space Research
CPAF cost plus award fee
CPFF cost plus fixed fee
DIPS Dynamic Isotope Power System
ECCV Earth crew capture vehicle
ERV Earth return vehicle
ETO Earth-to-orbit
EVA extravehicular activity
GCR galactic cosmic radiation
HMF health maintenance facility
HLLV heavy-lift launch vehicle
IAA International Academy of
Astronautics
IMLEO intial mass to low Earth orbit
ISRU in-situ resource utilization
LEO low Earth orbit
LMO low Mars orbit
LOX liquid oxygen
LSS life support system
MAV Mars-ascent vehicle
MGS Mars Global Surveyor
MOI Mars Orbit Insertion
MTV Mars transfer vehicle
NASA National Aeronautics andSpace Administration
ND NERVA derived
NDR NERVA derivative reactor
NERVA nuclear engine for rocket vehicleapplication
NTR nuclear thermal rocket
PI principal investigator
PVA photovoltaic array
RFC regenerative fuel cell
RTG radioisotope thermoelectric generator
SPE solar proton event
SSME Space Shuttle Main Engine
STS Space Transportation System
TEI trans-Earth injection
TCS Thermal Contract System
TMI trans-Mars injection
TROVs telerobotic rovers

1-1
1. Overview

1-2

1-3
1.1 Introduction
The human exploration of Mars will be acomplex undertaking. It is an enterprise thatwill confirm the potential for humans to leaveour home planet and make our way outwardinto the cosmos. Though just a small step on acosmic scale, it will be a significant one forhumans, because it will require leaving Earthwith very limited return capability. Thecommitment to launch is a commitment toseveral years away from Earth, and there is avery narrow window within which return ispossible. This is the most radical differencebetween Mars exploration and previous lunarexplorations.
Personnel representing several NASAfield centers have formulated a “ReferenceMission” addressing human exploration ofMars. This report summarizes their work anddescribes a plan for the first human missionsto Mars, using approaches that are technicallyfeasible, have reasonable risks, and haverelatively low costs. The architecture for theMars Reference Mission builds on previouswork, principally on the work of theSynthesis Group (1991) and Zubrin’s (1991)concepts for the use of propellants derivedfrom the martian atmosphere. In defining the
Reference Mission, choices have been made.In this report, the rationale for each choice isdocumented; however, unanticipatedtechnology advances or political decisionsmight change the choices in the future.
One principal use of the ReferenceMission is to lay the basis for comparingdifferent approaches and criteria in order toselect better ones. Even though the ReferenceMission appears to have better technicalfeasibility, less risk, and lower cost thanprevious approaches, improvement is stillneeded in these areas to make the first pilotedMars mission a feasible undertaking for thespacefaring nations of Earth. The ReferenceMission is not implementable in its presentform. It involves assumptions andprojections, and it cannot be accomplishedwithout further research, development, andtechnology demonstrations. It is also notdeveloped in the detail necessary forimplementation, which would require asystematic development of requirementsthrough the system engineering process. Withthis in mind, the Reference Mission may beused to:
•Derive technology research anddevelopment plans.

1-4
•Define and prioritize requirements forprecursor robotic missions.
•Define and prioritize flight experimentsfor precursor human missions, such asthose involving the Space Shuttle, Mir, orthe International Space Station.
•Understand requirements for humanexploration of Mars in the context ofother space missions and research anddevelopment programs, as they aredefined.
•Open discussion with internationalpartners in a manner that allowsidentification of potential interests of theparticipants in specialized aspects of themissions.
•Provide educational materials at alllevels that can be used to explain variousaspects of human interplanetaryexploration.
•Describe to the public, media, andpolitical system the feasible, long-termvisions for space exploration.
•Establish an end-to-end mission baselineagainst which other proposals can becompared.
However, the primary purpose of theReference Mission is to stimulate furtherthought and development of alternativeapproaches which can improve effectiveness,reduce risks, and reduce cost. Improvementscan be made at several levels; for example, inthe architectural, mission, and system levels.
•The architectural level involvesassembly of all elements into anintegrated whole. The principal featuresto be addressed in a new architecturethat will improve on the ReferenceMission appear to be simplification(particularly the number of separateelements that must be developed) andintegration with other programs.Simplification by reduction of systemelements can lower life-cycle costs anddiminish both programmatic andtechnical risk. For example, thedevelopment of higher performancespace propulsion systems can lead tosimplification, particularly if one vehiclecan be used for transit to and from Mars.Integration opportunities to link theMars program with other developmentprograms could reduce total costthrough sharing of developmental costs.The Reference Mission did not assumeintegration with a lunar explorationprogram. The development of a majorEarth-orbiting operations center inanother program could lead to majorchanges in the Reference Missionarchitectural approach.
•At the mission level, it may be possibleto reduce the number of separatelaunches from Earth. Reducing the totalnumber of launches required toimplement the Reference Missionobjectives could potentially reduceprogram and technical risk as well ascost. Focusing and streamlining mission
1-5
objectives and improving technologythat will lower mass and powerrequirements can improve the missionlevel.
•At the system level, the performance ofindividual systems and subsystems canbe improved through research anddevelopment programs. Theprogrammatic and technical risks can bereduced by demonstrations of ground,Earth-orbit, or planet surface (includingthe Moon) technology. Criteria forimproved systems are principallytechnical—reduced mass, reducedpower, increased reliability.
The current section of this reportprovides a brief overview of the origins of thestudy and the Reference Mission design,specifically discussing key issues, findings,and recommendations. Section 2 of this reportaddresses what can be learned byundertaking the Reference Mission anddescribes the scientific and technicalobjectives of Mars exploration. Section 3provides a detailed discussion of the missionlife cycle, the systems needed to carry it out,and the management challenges andopportunities that are inherent in a programto explore Mars with humans.
1.2 Background
The Mars Exploration Study Project wasundertaken to establish a vision for thehuman exploration of Mars that would serveas a mechanism for understanding the
programmatic and technical requirementsthat would be placed on existing and plannedAgency programs.
In August 1992, the first workshop of theMars Study Team held at the Lunar andPlanetary Institute in Houston, Texas,addressed the “whys” of Mars exploration toprovide the top-level requirements fromwhich the Mars exploration program could bebuilt (Duke and Budden 1992). The workshopattendees identified the major elements of apotential rationale for a Mars explorationprogram as:
•Human Evolution – Mars is the mostaccessible planet beyond the Earth-Moonsystem where sustained human presenceis believed to be possible. The technicalobjectives of Mars exploration should beto understand what would be requiredto sustain a permanent human presencebeyond Earth.
•Comparative Planetology – The scientificobjectives of Mars exploration should beto understand the planet and its history,and therefore to better understand Earth.
•International Cooperation – The politicalenvironment at the end of the Cold Warmay be conducive to a concertedinternational effort that is appropriate to,and may be required for, a sustainedMars program.
•Technology Advancement – The humanexploration of Mars currently lies at theragged edge of achievability. The

1-6
necessary technical capabilities are eitherjust available or on the horizon.Commitment to the program will botheffectively exploit previous investmentsand contribute to advances intechnology.
•Inspiration – The goals of Marsexploration are grand; they will motivateour youth, benefit technical educationgoals, and excite the people and nationsof the world.
The study team of personnel from NASAfield centers used these inputs to constructthe Reference Mission, and then translated theinputs into a set of goals and objectives.Ground rules and assumptions were agreedupon and reflect the lessons learned fromprevious study efforts. From this work, amission and a set of systems were developed.
1.3 Reference Mission Summary
1.3.1 Objectives
Reflecting the conclusions of the August1992 workshop, three objectives were adoptedfor the analysis of a Mars explorationprogram and the first piloted missions in thatprogram. They are to conduct:
•Human missions to Mars and verify away that people can ultimately inhabitMars.
•Applied science research to use Marsresources to augment life-sustainingsystems.
•Basic science research to gain newknowledge about the solar system’sorigin and history.
The human missions to Mars, which arerequired to accomplish the exploration andresearch activities, also contain requirementsfor safe transportation, maintenance on thesurface of Mars, and return of a healthy crewto Earth. The surface exploration missionenvisions approximately equal priority forapplied science research (that is, learningabout the environment, resources, andoperational constraints that would allowhumans eventually to inhabit the planet) andbasic science research (that is, exploring theplanet for insights into the nature of planets,the nature of Mars’ atmosphere and itsevolution, and the possible past existence oflife). These more detailed objectives form thebasis for defining the required elements andoperations for the Reference Mission.
In addition, past mission studies haveyielded results that have characterized pilotedMars missions as being inherently difficultand exorbitantly expensive. To confront thesecommonly accepted beliefs that areunfortunately tied to Mars missions, thisstudy added objectives to:
•Challenge the notion that the humanexploration of Mars is a 30-year programthat will cost hundreds of billions ofdollars. Although the nations of theworld could afford such expenditures incomparison to, for example, militarybudgets, the smaller the total cost, the
1-7
more likely it is that the program will beimplemented.
•Challenge the traditional technicalobstacles associated with sendinghumans to Mars.
•Identify relevant technologydevelopment and investmentopportunities that benefit both Marsexploration and Earth-bound endeavors.
From these basic objectives, a ReferenceMission was crafted by drawing on lessonslearned from many past studies and byadding new insights to various aspects of themission. This approach substantiallyimproved the yield from piloted missionswhile also reducing risk and cost.
1.3.2 Ground Rules and Assumptions
Translating these objectives into specificmissions and systems for the ReferenceMission required adopting a number ofground rules and assumptions. These were to:
•Balance technical, programmatic,mission, and safety risks.
•Provide an operationally simple missionapproach emphasizing the judicious useof common systems.
•Provide a flexible implementationstrategy.
•Limit the length of time that the crew iscontinuously exposed to theinterplanetary space environment.
•Define a robust planetary surfaceexploration capacity capable of safelyand productively supporting crews onthe surface of Mars for 500 to 600 dayseach mission.
•Define a capability to be able to live offthe land.
•Rely on advances in automation toperform a significant amount of theroutine activities throughout themission.
•Ensure that management techniques areavailable and can be designed into aprogram implementation that cansubstantially reduce costs.
•Use the Earth-Mars launch opportunitiesoccurring from 2007 through 2014. A2009 launch represents the most difficultopportunity in the 15-year Earth-Marscycle. By designing the spacetransportation systems for thisopportunity, particularly those systemsassociated with human flights, they canbe flown in any opportunity with eitherfaster transit times for the crew orincreased payload delivery capacity.
•Examine three human missions to Mars.The initial investment to send a humancrew to Mars is sufficient to warrantmore than one or two missions. Eachmission will return to the site of theinitial mission thus permitting anevolutionary establishment ofcapabilities on the Mars surface.

1-8
Although it is arguable that scientificdata return could be enhanced by astrategy where each human missionwent to a different surface site, the goalof understanding how humans caninhabit Mars seems more logicallydirected toward a single outpostapproach.
1.3.3 Mission and Systems
Previous studies of human exploration ofMars have tended to focus on spacecraft andflight, rather than on what the crew would doon the surface. The Reference Mission takesthe point of view that surface exploration isthe key to the mission, both for science andfor evaluation of the potential for settlement.As a consequence, the Reference Missionarchitecture allows for a robust surfacecapability with significant performancemargins: Crews will explore in the vicinity ofthe outpost out to a few hundred kilometers,will be able to study materials in situ and in asurface laboratory, and will be allowed toupdate and modify the exploration plan totake advantage of their discoveries.
In addition, key technologies will bedeveloped and demonstrated to testsettlement issues, potentially imposing asubstantial workload on the Mars explorationcrew. To improve the effectiveness of surfaceoperations, supporting systems must behighly reliable, highly autonomous, andhighly responsive to the needs of the crew.Some needs may not be anticipated duringcrew preparation and training, which will
significantly challenge the management andoperations systems to support the crew in thenew situations.
1.3.3.1 Mission Design
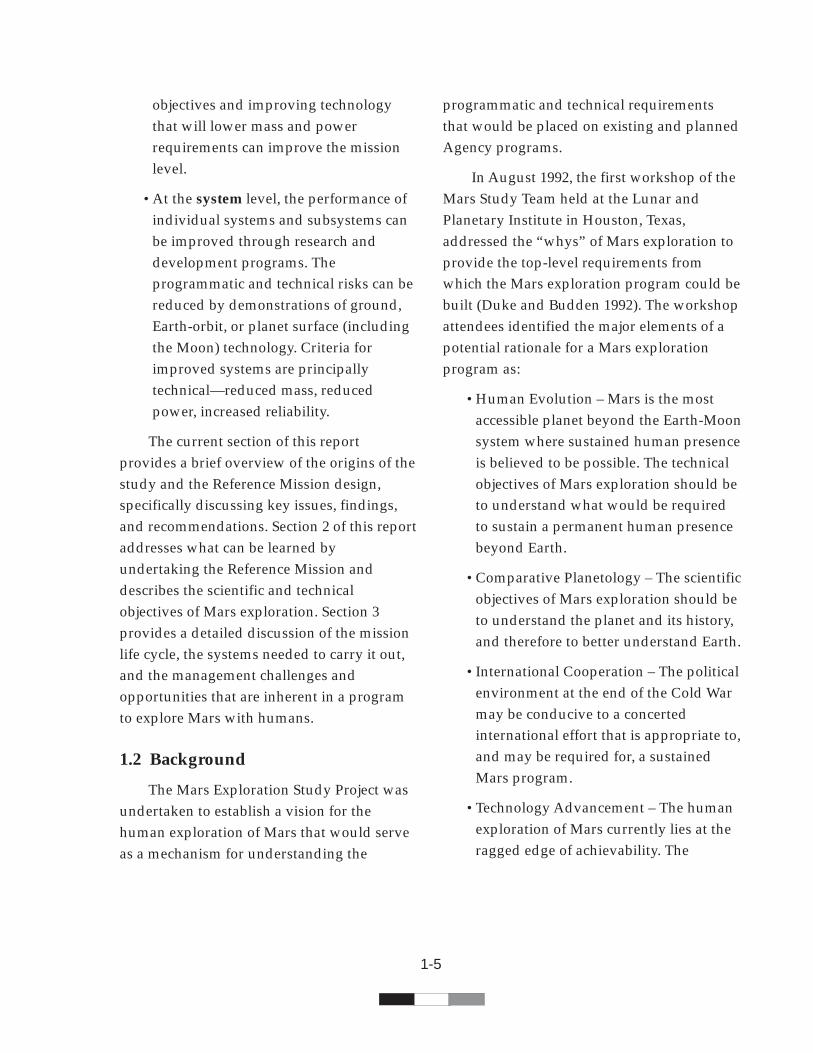
The crew will travel to and from Mars onrelatively fast transits (4 to 6 months) and willspend long periods of time (18 to 20 months;600 days nominal) on the surface, rather thanalternative approaches which require longertimes in space and reduce time on the surface.Figure 1-1 illustrates a typical trajectory.Designed to the worst-case missionopportunity (2007-2009) of the next twodecades, the transit legs are less than 180 daysin both directions. For easier Mars missionopportunities (for example, 2016-2018), thetransit legs are on the order of 130 days.Shorter transit times reduce the time spent bythe crew in zero g to the length of typicaltours of duty for the International SpaceStation. (Thus, the Mars Study Team chosenot to use artificial gravity spacecraft designsfor the Reference Mission.) In addition,relatively fast transits will reduce theexposure to galactic cosmic radiation and theprobability of encountering solar particleevents. Reducing the exposure to zero g andradiation events helps reduce the risk to thecrew.
The strategy chosen for the ReferenceMission, generally known as a “split mission”strategy, breaks mission elements into piecesthat can be launched directly from Earth withlaunch vehicles of the Saturn V or Energiaclass, without rendezvous or assembly in low
1-9
Earth orbit (LEO). The strategy has thesepieces rendezvous on the surface of Mars,which will require both accurate landing andmobility of major elements on the surface toallow them to be connected or to be movedinto close proximity. Another attribute of thesplit mission strategy is that it allows cargo tobe sent to Mars without a crew during thesame launch opportunity or even one or moreopportunities prior to crew departure. Thisallows cargo to be transferred on low energy,longer transit time trajectories and the crew tobe sent on a required higher energy, shortertransit time trajectory. Breaking the missioninto two launch windows allows much of theinfrastructure to be emplaced and checkedout before committing a crew to the mission,and also allows for a robust capability, withduplicate launches on subsequent missionsproviding either backup for the earlierlaunches or growth of initial capability.
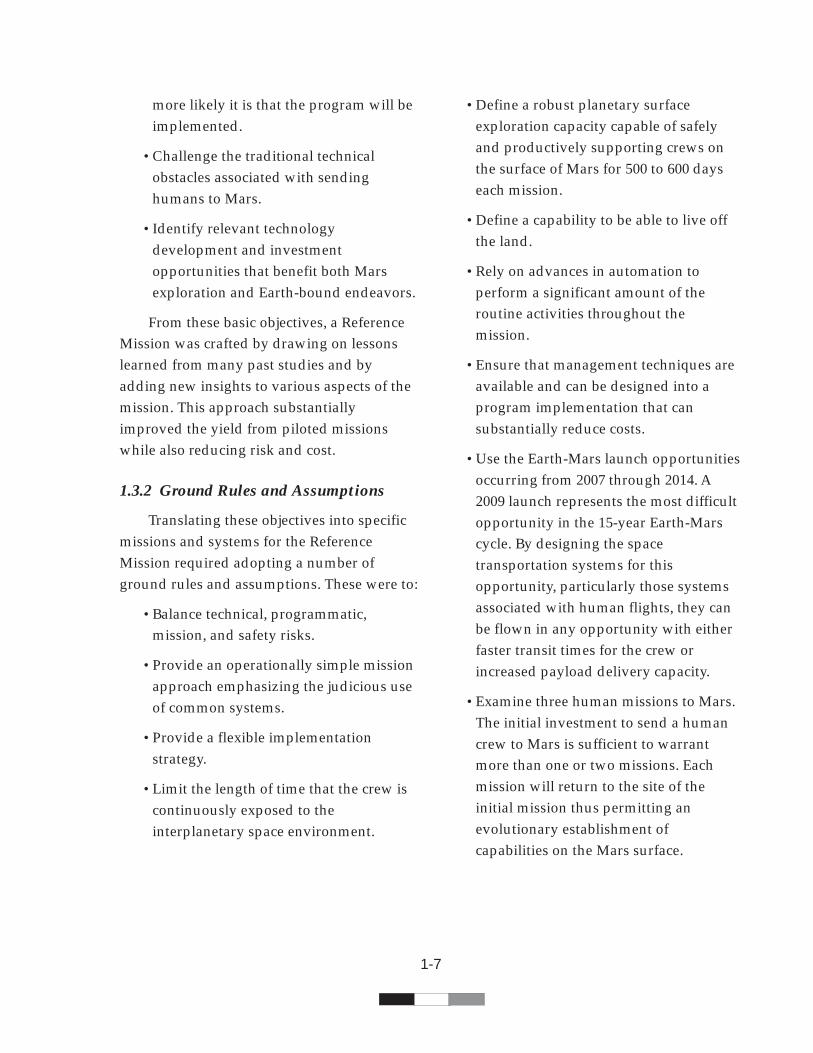
Figure 1-2 illustrates the missionsequence analyzed for the Reference Mission.In this sequence, three vehicles will belaunched from Earth to Mars in each of fourlaunch opportunities which, for reasonspresented earlier, start in 2007. The first threelaunches will not involve a crew but will sendinfrastructure elements to low Mars orbit andto the surface for later use. Each of theremaining opportunities analyzed for theReference Mission will send one crew andtwo cargo missions to Mars. These cargomissions will consist of an Earth-returnvehicle (ERV) on one flight and a landercarrying a Mars-ascent vehicle (MAV) andadditional supplies on the second. This
sequence gradually builds up assets on themartian surface so that at the end of the thirdcrew’s tour of duty, the basic infrastructurecould be in place to support a permanentpresence on Mars.
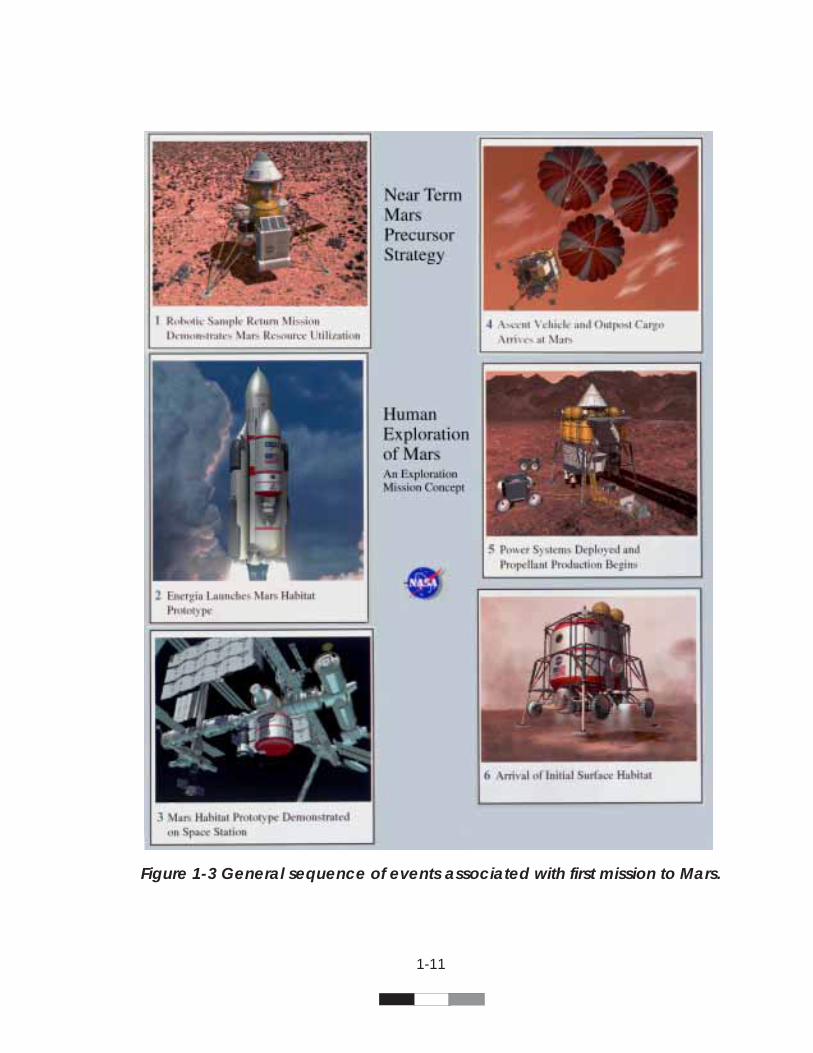
The six launches used to support theactivities of the first crew will be discussed inmore detail here to illustrate what willtypically occur for all three crews. (Note: Forthe nominal mission, launches 1 through 4 arerequired to support the first crew; launches 5and 6 provide backup systems for the firstcrew and, if not used, are available for thesecond crew.) Figure 1-3 illustrates thegeneral sequence of events associated withthe first crew’s mission to Mars as discussedin the following paragraphs.
In the first launch opportunity, threecargo missions are sent on minimum energytrajectories direct to Mars (that is, withoutassembly or fueling in LEO). Launch 1
γ
Earth Launch2/1/2014
Depart Mars3/11/2016
Arrive Mars7/1/2014
Earth Return6/29/2016
MISSION TIMES
OUTBOUND 150 daysSTAY 619 days RETURN 110 days
TOTAL MISSION 879 days
Nominal Departure3/11/2016
Figure 1-1 Typical fast-transittrajectory.
1-10
delivers a fully fueled ERV to Mars orbit. (Thecrew will rendezvous with this stage and useit to return to Earth after completion of theirsurface exploration mission.) Launch 2delivers an unfueled MAV, a propellantproduction module, a nuclear power plant,liquid hydrogen (to be used as a reactant toproduce the ascent vehicle propellant), and
approximately 40 tonnes of additionalpayload to the surface. After the descent stagelands on the surface, the nuclear reactorautonomously deploys itself several hundredmeters from the ascent vehicle. Using theMars atmosphere as feedstock, the propellantproduction module begins to manufacture thenearly 30 tonnes of oxygen and methane that
1
2
3
6
4
5
9
7
8
12
10
ETOFLIGHT 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016
∆ MAV-1 landing
∆ Initial Habitat landing
∆ ERV-1 parks in LMO
∆ Crew 1 ascent
∆ Crew 1 TEI
∆ Crew 1 Earth return
ERV loiter
ERV loiter
ERV loiter
∆ ERV-2 parks in LMO
∆ MAV-2 landing
∆ MAV 3 landing
Crew 1: launch ∆ ∆ Landing
Crew 2 launch ∆
Crew 3 launch ∆
∆ Landing
∆ Landing
∆ ERV-3 parks in LMO
∆ Crew 2 TEI∆ Crew 2 Earth return
∆ MAV 4 landing
∆ Ascent
∆ Crew 2 ascent
∆ ERV 4 LMO
2017
∆ Crew 3 TEI
2018
∆ Crew 3 Earth return
ERV loiter
11
1234567890112345678901
12345678
Interplanetary transit
Unoccupied wait in Mars orbit
Propellant production and on Mars surface
Crew surface operations
Figure 1-2 Mars Reference Mission sequence.
ERV: Earth Return VehicleMAV: Mars Ascent VehicleTEI: Trans Earth InjectionLMO: Low Mars Orbit
1-11
Figure 1-3 General sequence of events associated with first mission to Mars.
1-12
Figure 1-3 General sequence of events continued.

1-13
will be required to eventually deliver the crewto Mars orbit. This production is completedwithin approximately one year—severalmonths prior to the first crew’s scheduleddeparture from Earth. Launch 3 lands in thevicinity of the first descent vehicle anddelivers a surface habitat/laboratory,nonperishable consumables for a safe-haven,and a second nuclear power plant to theplanetary surface. The second nuclear powerplant autonomously deploys itself near thefirst power plant. Each power plant canprovide sufficient power (160 kWe) for theentire mature surface outpost, therebyproviding complete redundancy within thepower production function.
During the second launch opportunity,two additional cargo missions and the firstcrew are launched. All assets previouslydelivered to Mars have been checked out andthe MAV, already on the martian surface, isverified to be fully fueled before either thecrew or the additional cargo missions arelaunched from Earth. (Should any element ofthe surface system required for crew safety orcritical for mission success not check outadequately, the surface systems will be placedin standby mode and the crew missiondelayed until the systems can be replaced ortheir functions restored. Some systems can bereplaced using hardware originally intendedfor subsequent missions; others may befunctionally replaced by other systems.) Thefirst cargo launch of this second opportunityis a duplicate of Launch 1 from the firstopportunity, delivering a second fully fueledERV to Mars orbit. The second cargo launch
similarly mirrors Launch 2 of the previousopportunity, delivering a second unfueledascent vehicle and propellant productionmodule. These systems provide backup orextensions of the previously deployedcapabilities. For example, the second MAVand second ERV provide the first crew withtwo redundant means for each leg of thereturn trip. If, for some reason, either the firstascent vehicle or the first return vehiclebecomes inoperable after the first crewdeparts Earth, this crew can use either of thesystems launched in the second opportunityinstead. If the first ascent and return vehiclesoperate as expected, then the systemsdelivered in the second opportunity willsupport the second crew that will launch toMars in the third opportunity.
The first crew of six departs for Mars inthe second opportunity. They leave Earthafter the two cargo missions have beenlaunched, but because they are sent on a fasttransfer trajectory of only 180 days, they willarrive in Mars orbit approximately 2 monthsbefore the cargo missions. The crew lands onMars in a surface habitat substantiallyidentical to the habitat/laboratory previouslydeployed on the martian surface. Aftercapturing into a highly elliptic Mars orbit, thecrew descends in the transit habitat torendezvous on the surface with the otherelements of the surface outpost. (The crewcarries sufficient provisions for the entiresurface stay in the unlikely event that they areunable to rendezvous on the surface with theassets previously deployed.)

1-14
Surface exploration by robotic vehiclesand human explorers will include a widerange of activities.
•Observing and analyzing the surface andsubsurface geology.
•Observing and analyzing thecomposition and structure of theatmosphere.
•Collecting samples and examining themin the outpost laboratory.
•Performing experiments designed togauge the ability of humans to inhabitMars.
Prior to the arrival of the first humancrew, telerobotic rovers (TROVs) may bedelivered to the surface. (These rovers areassumed to be intelligent enough to performbroadly stated objectives without humanassistance. But humans will continue tomonitor progress and be available to“supervise” the TROV if it cannot solve aparticular problem.) When the crew arrives,the rovers will be available for teleoperationby the crew. The TROVs may be designed toprovide global access and may be able toreturn samples to the outpost from hundredsof kilometers distance from the site if they aredeployed 2 years before the crew arrives.
The outpost laboratory will be outfittedto provide mineralogical and chemicalanalyses of rocks, soils, and atmosphericsamples; and depending on technicaldevelopment, it may be possible to undertakesimple kinds of geochronologic analysis on
Mars. The purpose of these studies would beto support the field investigations, answer“sharper” questions, and allow the humanexplorers to narrow their focus to the sites ofoptimum sample collection. As hypothesesevolve, crews will be able to return to samplesites and gather specific samples to test thehypotheses. Ultimately, selected samples willbe returned to Earth for more detailedanalysis.
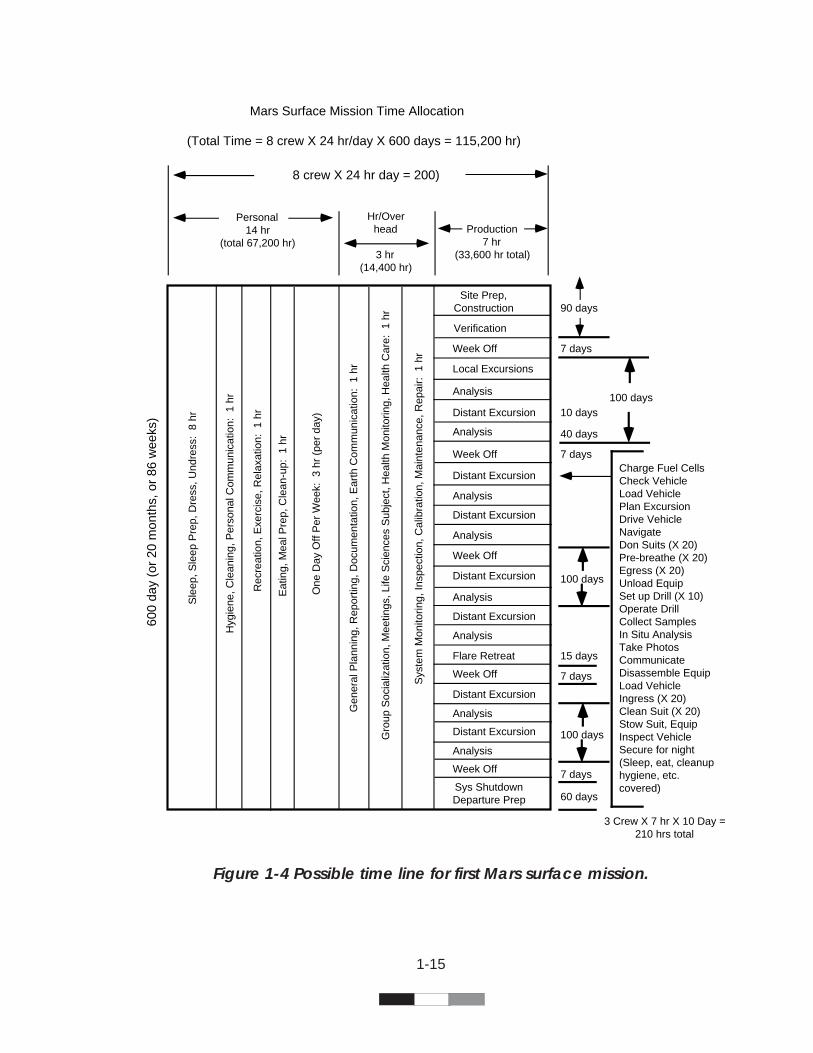
As experience grows, the range of humanexploration will grow from the local to theregional. Regional expeditions, lastingperhaps 2 weeks and using mobile facilities,may be conducted at intervals of a fewmonths. Between these explorations, analysisin the laboratory will continue. The crew willalso spend a significant portion of its timeperforming maintenance and housekeepingtasks (system design requirements addressingenhanced reliability and maintainability willhelp keep these activities to a minimum).Figure 1-4 provides a possible time line forthe first surface mission.
The deployment of a bioregenerative lifesupport capability will be an early activityafter crew landing. Although this system isnot required to maintain the health andvitality of the crew, it will improve therobustness of the life support system and isimportant to the early objectives of theoutpost.
Crew activities related to living onanother planet should be viewed asexperiments. With minor modifications in
1-15
Figure 1-4 Possible time line for first Mars surface mission.
Mars Surface Mission Time Allocation
(Total Time = 8 crew X 24 hr/day X 600 days = 115,200 hr)
8 crew X 24 hr day = 200)
Charge Fuel CellsCheck VehicleLoad VehiclePlan ExcursionDrive VehicleNavigateDon Suits (X 20)Pre-breathe (X 20)Egress (X 20)Unload EquipSet up Drill (X 10)Operate DrillCollect SamplesIn Situ AnalysisTake PhotosCommunicateDisassemble EquipLoad VehicleIngress (X 20)Clean Suit (X 20)Stow Suit, EquipInspect VehicleSecure for night(Sleep, eat, cleanuphygiene, etc.covered)
3 Crew X 7 hr X 10 Day =210 hrs total
600
day
(or
20 m
onth
s, o
r 86
wee
ks)
Sle
ep, S
leep
Pre
p, D
ress
, Und
ress
: 8
hr
Hyg
iene
, Cle
anin
g, P
erso
nal C
omm
unic
atio
n: 1
hr
Rec
reat
ion,
Exe
rcis
e, R
elax
atio
n: 1
hr
Eat
ing,
Mea
l Pre
p, C
lean
-up:
1 h
r
One
Day
Off
Per
Wee
k: 3
hr
(per
day
)
Gen
eral
Pla
nnin
g, R
epor
ting,
Doc
umen
tatio
n, E
arth
Com
mun
icat
ion:
1 h
r
Gro
up S
ocia
lizat
ion,
Mee
tings
, Life
Sci
ence
s S
ubje
ct, H
ealth
Mon
itorin
g, H
ealth
Car
e: 1
hr
Sys
tem
Mon
itorin
g, In
spec
tion,
Cal
ibra
tion,
Mai
nten
ance
, Rep
air:
1 h
r
Site Prep,Construction
Verification
Week Off
Local Excursions
Analysis
Distant Excursion
Analysis
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Flare Retreat
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Week Off
Sys ShutdownDeparture Prep
Personal14 hr
(total 67,200 hr)
Hr/Overhead
3 hr(14,400 hr)
Production7 hr
(33,600 hr total)
90 days
7 days
100 days10 days
40 days
7 days
100 days
15 days
7 days
7 days
100 days
60 days
1-16
hardware and software, ordinary experiencescan be used to provide objective databases forunderstanding the requirements for humansettlement.
The first crew will stay at the outpost for18 to 20 months. Part of their duties will be toprepare the outpost site for the receipt ofadditional elements launched on subsequentmission opportunities. Since the first crewwill have to depart before the second crewarrives, some systems will have to be placedin standby mode.
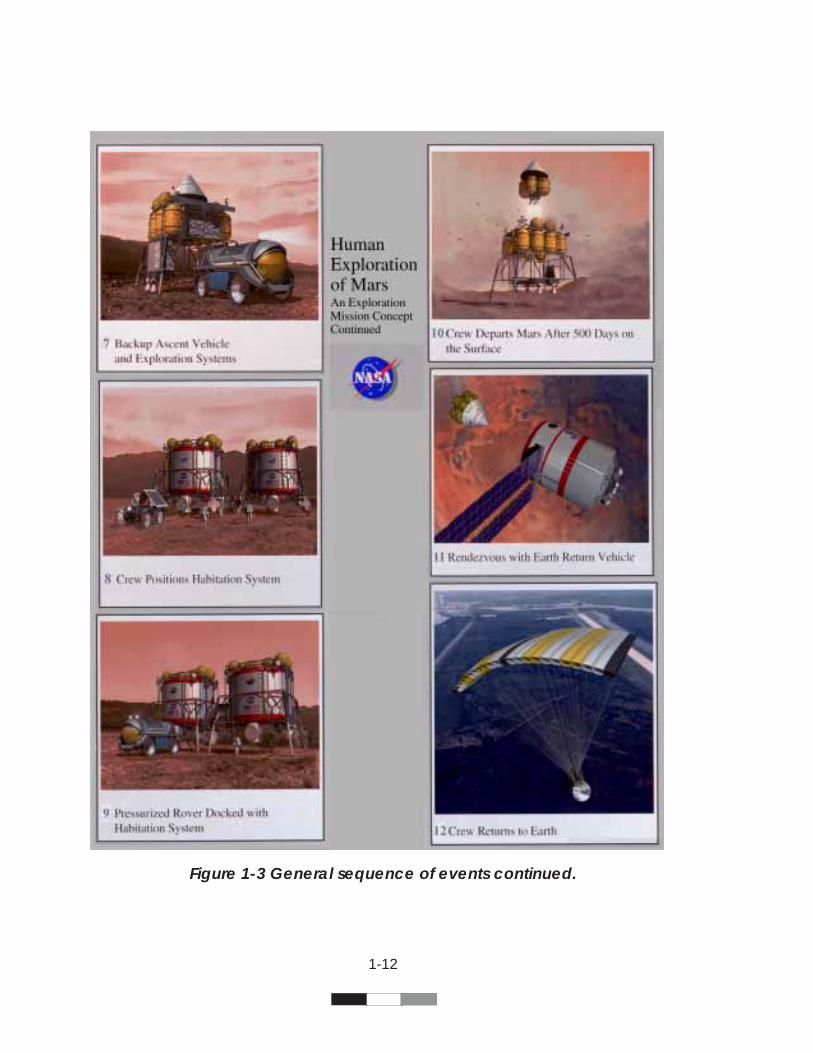
After their stay on Mars, each crew willuse the previously landed and in situ-resource-utilization fueled ascent vehicle toreturn to orbit where they will rendezvouswith the waiting ERV. The crew will return toEarth in a habitat similar to the one used forthe outbound transit leg. This habitat, whichis part of the ERV deployed in a previousopportunity by one of the cargo flights,typically will have been in an untended modefor nearly 4 years prior to the crew arrival.
1.3.3.2 In Situ Resource Production
The highly automated production ofpropellant from martian resources is anotherdefining attribute of the Reference Mission.The technology for producing methane andliquid oxygen from the martian atmosphereand some nominal hydrogen feedstock fromEarth is an effective performanceenhancement and appears to betechnologically feasible within the next fewyears. The split mission strategy allows thepropellant production capability to be
emplaced, checked out, and operated toproduce the required propellant prior tolaunching the crew from Earth.
In addition to spacecraft propulsion, theproduction capability on Mars can providefuel for surface transportation, reactants forfuel cells, and backup caches of consumables(water, oxygen, nitrogen, and argon) for thelife support system.
1.3.3.3 Flight Crew
Humans are the most valuable missionasset for Mars exploration and must notbecome the weak link. The objective forhumans to spend up to 600 days on themartian surface places unprecedentedrequirements on the people and theirsupporting systems. Once committed to themission on launch from LEO, the crew mustbe prepared to complete the full missionwithout further resupply from Earth.Unlimited resources cannot be providedwithin the constraints of budgets and missionperformance. Their resources will either bewith them or will have already been deliveredto or produced on Mars. So trade-offs must bemade between cost and comfort, as well asperformance and risk. Crew self-sufficiency isrequired because of the long duration of theirmission and the fact that their distance fromEarth impedes or makes impossible thetraditional level of communications andsupport by controllers on Earth. The crewswill need their own skills and training andspecialized support systems to meet the newchallenges of the missions.

1-17
The nominal crew size for this mission issix. This number is believed to be reasonablefrom the point of view of past studies andexperience and is a starting point for study.Considerable effort will be required todetermine absolute requirements for crewsize and composition. This determination willhave to consider the tasks required of thecrew, safety and risk considerations, and thedynamics of an international crew. Crewmembers should be selected in part based ontheir ability to relate their experiences back toEarth in an articulate and interesting manner,and they should be given enough free time toappreciate the experience and the opportunityto be the first explorers of another planet.Significant crew training will be required toensure that the crew remains productivethroughout the mission.
1.3.3.4 Robotic Precursors
Robotic precursor missions will play asignificant role in three important areas of theReference Mission. The first area is to gatherinformation about Mars that will be used todetermine what specific crew activities will beperformed and where they will be performed.The second area is to demonstrate theoperation of key techonologies required forthe Reference Mission. The third is to land,deploy, operate, and maintain a significantportion of the surface systems prior to thearrival of the crew.
For optimum mission performance, itwill be necessary to pick a landing site basedprimarily on its ability to achieve Reference
Mission objectives. The site must beconsistent with operational considerations,such as landing and surface operationalsafety. Detailed maps of candidate landingsites built from data gathered by precursorrobotic missions will define the safety andoperational hazards of the sites, as well asconfirm whether access to scientificallyinteresting locations is possible by humans orrobotic vehicles. Robotic surface missions,including missions to return samples, may berequired to confirm remotely sensed datafrom orbit and to satisfy planetary protectionissues. To satisfy the human habitationobjectives in particular, it would be highlydesirable to locate the outpost site wherewater can be readily extracted from mineralsor from subsurface ice deposits. Such adetermination may only be possible from datacollected by a robotic surface mission.
To accomplish the Reference Mission, keyadvances in certain critical technologies willneed to occur. The robotic precursor missionsoffer an opportunity to demonstrate theoperation of many of those technologies, suchas in situ resource utilization, aerocapture,precision landing, etc. The information andexperience gained from the demonstration ofthese technologies will add immeasurableconfidence for their use in the humanmission.
The first phase of human exploration isthe automated landing of surfaceinfrastructure elements, including a system toproduce propellant and life supportconsumables, the first of two habitats, power

1-18
systems, and surface transportation elements.All of these systems will be delivered, set up,and checked out using robotic systemsoperated or supervised from Earth. Thepropellant required for the MAV will beproduced and stored as will oxygen andwater caches for the habitat. The overall sitewill be prepared for receipt of the secondhabitat.
1.3.3.5 Launch Systems
The scale of the required Earth-to-orbit(ETO) launch capability is determined by themass of the largest payload intended for themartian surface. The nominal design mass forindividual packages to be landed on Mars inthe Reference Mission is 50 tonnes for a crewhabitat sized for six people that is transferredon a high-energy orbit. This requires thecapability for a single launch vehicle to befrom about 200 to 225 tonnes to LEO.
Because 200-ton-class launch vehiclesraise development cost issues, considerationwas given to the option of launching pieces toLEO using smaller vehicles and assembling(attaching) them in space prior to launchingthem to Mars. This smaller launch vehicle(110 to 120 tonnes) would have the advantageof more modest development costs and iswithin the capability of the Russian Energiaprogram. However, the smaller launch vehicleintroduces several potential difficulties to theReference Mission scenario. The simplest,most desirable implementation using thissmaller launch vehicle is to simply dock thetwo elements in Earth orbit and immediately
depart for Mars. To avoid the boiloff loss ofcryogenic propellants in the departure stages,all elements must be launched from Earth inquick succession. This places a strain on asingle launch facility and its groundoperations crews or requires the closecoordination of two or more launch facilities.Assembling the Mars vehicles in orbit andloading them with propellants from anorbiting depot just prior to departure mayalleviate the strain on the launch facilities, butthe best Earth orbit for a Mars mission isdifferent for each launch opportunity.Therefore, a permanent construction orpropellant storage facility in a single Earthorbit is not an optimal solution.
The choice of a launch vehicle remains asignificant issue for any Mars mission. For theReference Mission, however, the larger, 200-ton-class launch vehicle has been assumedwithout specifying a particular configuration.
1.3.3.6 Interplanetary Transportation System
The interplanetary transportation systemconsists of a trans-Mars injection (TMI) stage,a biconic aeroshell for Mars orbit capture andMars entry, a descent stage for surfacedelivery, an ascent stage for crew return toMars orbit, an Earth-return stage fordeparture from the Mars system, and a crewcapsule (similar to an Apollo CommandModule) for Earth entry and landing. Asmentioned earlier, the Reference Missionsplits the delivery of elements to Mars intocargo missions and human missions, all ofwhich are targeted to the same locale on the

1-19
surface and must be landed in close proximityto one another. The transportation strategyadopted in the Reference Mission eliminatesthe need for assembly or rendezvous ofvehicle elements in LEO, but it does require arendezvous in Mars orbit for the crew leavingMars. The transportation strategy alsoemphasizes the use of common elements toavoid excessive development costs and toprovide operational simplicity.
The TMI stage (used to propel thespacecraft from LEO onto a trans-Marstrajectory) employs nuclear thermalpropulsion. Nuclear thermal propulsion wasadopted for the TMI burn because of itsperformance advantages; its advanced,previously demonstrated state of technologydevelopment; its operational flexibility; andits inherent mission enhancements. A singleTMI stage was developed for both pilotedand cargo missions. The stage is designed forthe more energetically demanding 2009 fasttransit trajectory and then used in theminimum energy cargo missions to carry themaximum payload possible to Mars. In thehuman missions, the TMI stage uses four15,000 lb. thrust NERVA (Nuclear Engine forRocket Vehicle Application)-derivative reactor(NDR) engines (Isp = 900 seconds) to deliverthe crew and the surface habitat/descentstage onto the trans-Mars trajectory(Borowski, et al., 1993). After completion ofthe two-perigee-burn Earth departure, theTMI stage is inserted into a trajectory that willnot reencounter Earth or Mars over the courseof one million years. The TMI stage used withthe crew incorporates a shadow shield
between the NDR engine assembly and theLH2 tank to protect the crew from radiationthat builds up in the engines during the TMIburns. Although it may seem wasteful todiscard the nuclear stage after one use, thecomplexity of Mars orbit insertion andrendezvous operations for the return flightare avoided.
As shown in Figure 1-5, the same TMIstage is used in all cargo missions, whichallows the transportation system to deliverapproximately 65 tonnes of useful cargo to thesurface of Mars or nearly 100 tonnes to Marsorbit (250 × 33,793 km) on a single launchfrom Earth. The TMI stage for cargo deliveryrequires the use of only three NDR engines,so one NDR engine and the shadow shield areremoved from the TMI stage, which reducescost and improves performance.
Mars orbit capture and the majority ofthe Mars descent maneuver is performedusing a single biconic aeroshell. The decisionto perform the Mars orbit capture maneuverwas based on the facts that (1) an aeroshellwill be required to perform the Mars descentmaneuver no matter what method is used tocapture into Mars orbit, (2) the additionaldemands on a descent aeroshell to meet theMars capture requirements were determinedto be modest, and (3) a single aeroshelleliminated one staging event, and thus onemore potential failure mode, prior to landingon the surface.
The crew is transported to Mars in ahabitat that is fundamentally identical to the
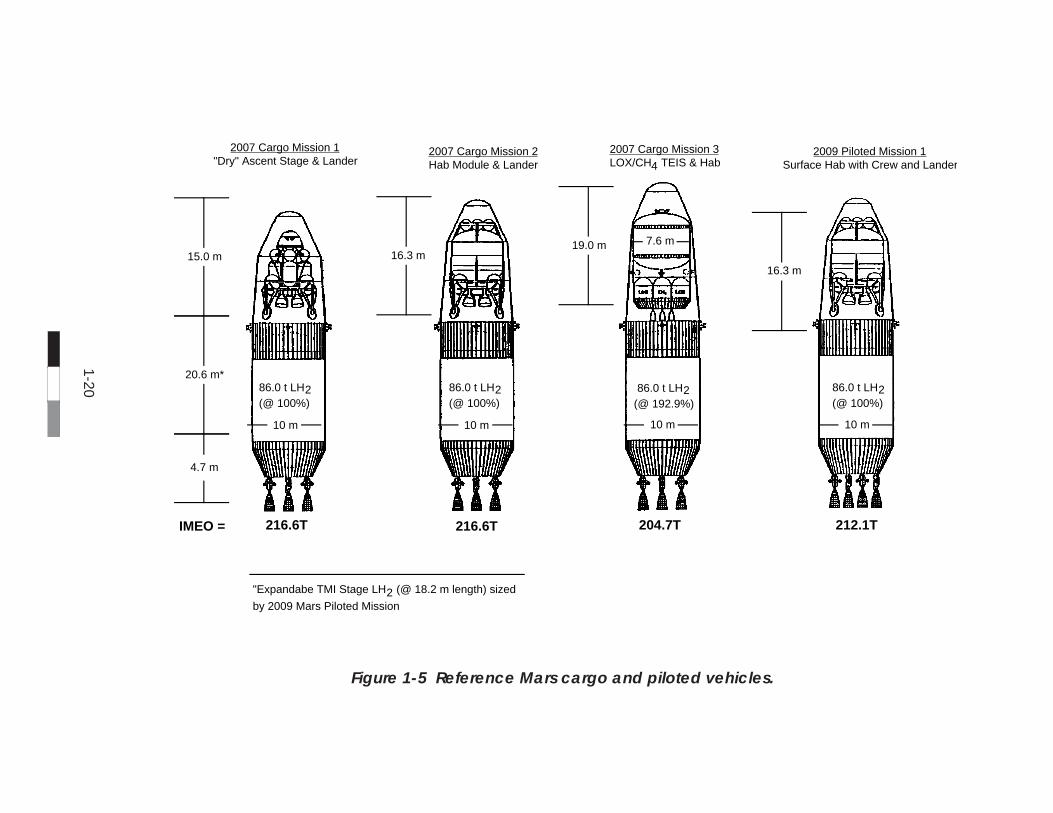
1-20
Figure 1-5 Reference Mars cargo and piloted vehicles.
10 m
2007 Cargo Mission 1"Dry" Ascent Stage & Lander
2007 Cargo Mission 2Hab Module & Lander
2007 Cargo Mission 3LOX/CH4 TEIS & Hab
2009 Piloted Mission 1Surface Hab with Crew and Lander
"Expandabe TMI Stage LH2 (@ 18.2 m length) sized
by 2009 Mars Piloted Mission
86.0 t LH2(@ 100%)
86.0 t LH2(@ 100%)
86.0 t LH2(@ 100%)
86.0 t LH2(@ 192.9%)
10 m10 m10 m
7.6 m
16.3 m
19.0 m16.3 m15.0 m
20.6 m*
4.7 m
IMEO = 216.6T216.6T 204.7T 212.1T
1-21
surface habitat deployed robotically on aprevious cargo mission. By designing thehabitat so that it can be used during transitand on the surface, a number of advantages tothe overall mission are obtained.
•Two habitats provide redundancy on thesurface during the longest phase of themission.
•By landing in a fully functional habitat,the crew does not need to transfer from a“space-only” habitat to the surfacehabitat immediately after landing, whichallows the crew to readapt to a gravityenvironment at their own pace.
•The program is required to develop onlyone habitat system. The habitat design isbased on its requirement for surfaceutilization. Modifications needed toadapt it to a zero-g environment must beminimized.
A common descent stage has beenassumed for the delivery of the transit/surface habitats, the ascent vehicle, and othersurface cargo. The descent vehicle is capableof landing approximately 65 tonnes of cargoon the Mars surface. The landing vehicle issomewhat oversized to deliver crew;however, design of a scaled-down lander andthe additional associated costs are avoided Toperform the postaerocapture circularizationburn and the final approximately 500 metersper second of descent prior to landing on theMars surface, the common descent stageemploys four RL10-class engines modified toburn LOX/CH4. The use of parachutes has
been assumed to reduce the descent vehicle’sspeed after the aeroshell has ceased to beeffective and prior to the final propulsivemaneuver. The selection of LOX/CH4 allowsa common engine to be developed for use byboth the descent stage and the ascent stage,the latter of which is constrained by thepropellant that is manufactured on thesurface using indigenous materials.
The ascent vehicle is delivered to theMars surface atop a cargo descent stage. It iscomposed of an ascent stage and an ascentcrew capsule. The ascent stage is delivered toMars with its propellant tanks empty.However, the descent stage delivering theascent vehicle includes several tanks of seedhydrogen for use in producing theapproximately 30 tonnes of LOX/CH4
propellant for the nearly 5,600 meters persecond delta-V required for ascent to orbitand rendezvous with the ERV. The ascentvehicle uses two RL10-class engines modifiedto burn LOX/CH4.
The ERV is composed of the trans-Earthinjection (TEI) stage, the Earth-return transithabitat, and a capsule the crew will use toreenter the Earth’s atmosphere. The TEI stageis delivered to Mars orbit fully fueled, whereit waits for nearly 4 years before the crew usesit to return to Earth. It uses two RL10-classengines modified to burn LOX/CH4. Theseare the same engines developed for the ascentand descent stages, thereby reducing enginedevelopment costs and improvingmaintainability. The return habitat is aduplicate of the outbound transit/surface

1-22
habitat used by the crew to go to Mars, butcontains consumables for the return trip onlyand minimizes crew accommodationsrequired for the surface mission.
1.3.3.7 Surface Systems
The provision of adequate amounts ofelectrical power is fundamental to asuccessful exploration program. For thetransit phase, the need for power is lesssevere than on the martian surface. Solarenergy is available for crew needs throughoutthe cruise phase (the transit phase both to andfrom Mars).
The selection of a power systems strategyfor surface operations is guided by riskconsiderations, which require two-levelredundancy for mission-critical functions andthree-level redundancy for life-criticalfunctions. The surface power systems shouldhave 15+ year lifetimes to allow them to servethe three mission opportunities with goodsafety margins. Surface transportation powersystems should have 6+ year lifetimes tominimize the need for replacement over theprogram lifetime.
The strategy adopted for the ReferenceMission includes a primary and backupnuclear reactor with dynamic energyconversion. Each system is capable ofproducing 160 kWe. Additionally, each habitatretains the solar arrays used during transit,and they can also be operated on the martiansurface. Due to several factors (for example,the presence of an atmosphere, a day-nightcycle, etc.) each power system can produce
approximately 30 percent of the powergenerated in space. For emergency situations,the pressurized rover’s Dynamic IsotopePower System can supply 10 kWe ofcontinuous power.
From a series of volume, mass, andmission analyses, a common habitat structuralcylinder, 7.5 meters in diameter, bilevel, andvertically oriented, was derived for theReference Mission. The three habitationelement types identified for the ReferenceMission (the surface laboratory, the transit/surface habitation element, and the Earth-return habitation element) will containsubstantially identical primary and secondarystructures, windows, hatches, dockingmechanisms, power distribution systems, lifesupport, environmental control, safetyfeatures, stowage, waste management,communications, airlock function, and crewegress routes. The following are briefdescriptions of the unique aspects of the threeprimary habitation elements developed forthe Reference Mission analysis.
•The Mars surface laboratory, sent out,landed, and verified prior to the launchof any crew members, will operate onlyin 3/8 gravity. It contains a large,nonsensitive (that is, no specialenvironmental control required) stowagearea with crew support elements on onelevel and the primary science andresearch lab on the second level. Futuredevelopment of this element includespossible retrofitting of the stowage levelinto a greenhouse as consumables and

1-23
resources are consumed and free volumeis created.
•The Mars transit/surface habitatscontain the required consumables for theMars transit and surface duration ofapproximately 800 days (180 days intransit and 600 days on the surface) aswell as all the required equipment forthe crew during the 180-day transfertrip. This is the critical element that musteffectively operate in both zero andpartial gravity. Once on the surface ofMars, this element will be physicallyconnected with the previously landedsurface lab thereby doubling thepressurized volume for the crew.Eventually, all four habitation elements(the surface laboratory and three transit/surface habitats) will be interconnected.
•The Earth-return habitat, functioningonly in zero g and requiring the leastamount of volume for consumables, willbe volume rich but must be massconstrained to meet the limitations of theTEI stage. Since little activity (other thanconditioning for the one-g environmenton Earth and training for the Earth-return maneuvers) is projected for thecrew during this phase of the mission,mass and radiation protection were thekey concerns in the internal architectureconcepts created.
Extravehicular activity (EVA) tasksconsist of maintaining the habitats andsurface facilities and conducting a scientificexploration program encompassing geologic
field work, sample collection, anddeployment, operation, and maintenance ofinstruments.
Mobility on several scales is required bypeople operating from the Mars outpost.Crew members outside the habitat will be inpressure suits and will be able to operate atsome distance from the habitat, determinedby their capability to walk back to theoutpost. They may be served by a variety oftools, including rovers, carts, and wagons. Ona local scale, perhaps 1 to 10 kilometers fromthe outpost, exploration will be implementedby unpressurized wheeled vehicles. Beyondthe safe range for exploration on foot,exploration will be in pressurized rovers,allowing explorers to operate for the mostpart in a shirtsleeve environment.
The requirements for long-range surfacerovers include having a radius of operation ofup to 500 km in exploration sorties that allow10 workdays to be spent at a particularremote site, and having sufficient speed toensure that less than half of the excursiontime is used for travel. Each day, up to 16person-hours would be available for EVAs.The rover is assumed to have a nominal crewof two people, but be capable of carrying fourin an emergency. Normally, the rover wouldbe operated (maneuvering from site to site,transmitting high data rate communications,supporting EVA activities, etc.) only in thedaytime, but could conduct selectedinvestigations at night.

1-24
1.3.3.8 Operations
Previous space missions have generallycost more to operate than to design andconstruct. This phenomenon was causedpartly by the fact that systems were designedfirst and operations were developed to fit thedesigns. The Reference Mission attempts tobring operational considerations into theprocess early to better balance the cost ofdesign and development with the cost ofoperations.
1.3.3.8.1 Crew Operations
The principal difference between Marsexploration and previous space ventures isthe requirement for crew operations in anenvironment where on-call communications,assistance, and advice from groundcontrollers is not available in emergencies dueto the communications delay. This leads to aset of operations requirements that:
•The crew be able to performautonomously for time-critical portionsof the mission.
•Highly reliable, autonomous systemoperations be possible without intensivecrew participation.
•A balance be struck between groundcontrol and the crew on Mars whichoptimizes the crew’s time andeffectiveness yet maintains theirindependence and motivation to attainmission objectives.
Thus, the Reference Mission will besuccessful to the degree that ground and
flight crews can execute all activities whichlead to the accomplishment of missionobjectives. All crew activities throughout eachmission, from prelaunch through postlanding,constitute crew operations and as such areessential to the overall program. To enhanceprogram success, they must be factored intoall aspects of program planning. The majorityof crew activities fall into one of fourcategories: training, science and exploration,systems operations and maintenance, andprogrammatics.
•Training includes activities such asdevelopment of training programs,development of training facilities andhardware, prelaunch survival trainingfor all critical life support systems,operational and maintenance training onmission-critical hardware, prelaunch andin-flight proficiency training for criticalmission phases, and science and researchtraining for accomplishing primaryscience and exploration objectives.
•The majority of science and explorationactivities will be accomplished on thesurface of Mars and will include, but notbe limited to, operating TROVs,habitability exercises, local and regionalsorties, and planetary scienceinvestigations. Supplemental scienceobjectives may be accomplished duringother phases of the mission as well butwill be limited by the mass available foronboard science equipment. Thoseactivities required for crew health andsafety (such as medical checks during
1-25
transit phases, monitoring solar activitiesfor flares, etc.) will be performed.
•During the first mission, a substantialamount of crew time will be devoted tothe operation and maintenance ofvehicle systems. This time is expected todecrease during subsequent missions asboth the systems and operationalexperience bases mature. However,maximizing the crew’s useful scienceand exploration time will increaseoverall mission effectiveness, and thesystems or procedures which contributeto increasing this time and decreasingroutine operations and maintenance willbe incorporated wherever possible.
•Lastly, programmatic activities for flightcrews will include public relations,documentation, reporting, and real-timeactivity planning. Public relationsactivities have been and always will bean integral part of crew activities. Whilethese activities absorb resources, themost significant of which is time, theyalso bring public and political support tothe program and provide some of thereturn on investment of the program.Throughout all mission phases,documentation of activities and feedbackon training effectiveness will be requiredof all crews. This will be essential tomake effective use of the follow-oncrew’s training time and the program’straining hardware and facilities. Many ofthe mission-critical activities will beplanned and rehearsed in great detail
before each crew leaves Earth. However,once on the surface of Mars, the verynature of the work done by the crewswill require real-time activity planningto take advantage of discoveries made asthe mission progresses.
No specific conclusions regardinghardware requirements, facilitiesrequirements, training programs, and the likewere derived for this study. But a number ofrecommendations and guidelines regardingthese areas have been developed and tailoredto the various mission phases that will beexperienced by each crew sent to Mars. Whilethese and other crew activities may not beseen as directly affecting program success, allareas contribute to the successful execution ofeach mission and, therefore, are essential tothe overall success of the Reference Mission.
1.3.3.8.2 Earth-Based Support
The overall goal of Earth-based supportoperations is to provide a framework forplanning, managing, and conductingactivities which achieve mission objectives.Achieving this operational goal requiressuccessful accomplishment of the followingfunctions.
•Safe and efficient operation of allresources. This includes, but is notlimited to, vehicles, support facilities,training facilities, scientific and systemsdata, and personnel knowledge andexperience bases.

1-26
•Provision of the facilities and anenvironment which allow users (such asscientists, payload specialists, and to anextent crew members) to conductactivities that will enhance the missionobjectives.
•Successful management and operation ofthe overall program and supportingorganizations. This requires definingroles and responsibilities andestablishing a path of authority. Programand mission goals and objectives mustbe outlined so that managementresponsibilities are clear and direct.Confusing or conflicting objectives canresult in loss of resources, the mostimportant of which are time and money.In addition, minimizing the number oflayers of authority will help to preventoperational decision-making activitiesfrom being prolonged.
The Reference Mission, while large andcomplex, has the added complication of beinga program with mission phases which cannotbe supported with near real-time operations.Planetary surface operations pose uniqueoperational considerations on theorganization of ground support and facilities.A move toward autonomy in vehicleoperations, failure recognition and resolution,and mission planning is needed. And groundsupport must be structured to support theseneeds.
In general, due to the uniqueness ofplanetary surface operations, Earth-basedsupport should be assigned the role of
managing and monitoring operationsplanning and execution while crew memberswill be assigned the actual responsibility foroperations planning and execution. Crewmembers will be told what tasks to do orwhat objectives to accomplish, but not how todo it. This has the benefit of involving systemand payloads experts in the overall planning,yet giving crews the flexibility to execute thetasks. The proposed method for the ReferenceMission would take advantage of the uniqueperspective of crew members in a newenvironment but would not restrict theiractivities because of the mission’s remotenature. Additionally, it places theresponsibility of mission success with thecrew, while the overall responsibility forprioritizing activities in support of missionobjectives resides with Earth-based support.
After dividing functional responsibilitiesbetween Earth-based support and crew, thesupport may be structured to manage theappropriate functions. To accomplish missionobjectives while maintaining the firstoperational objective of safe and efficientoperation of all resources, Earth-basedsupport can be organizationally separatedinto systems operations and scienceoperations provided a well-defined interfaceexists between the two. The systemsoperations team would be responsible forconducting the safe and efficient operation ofall resources, while the science operationsteam would be responsible for conductingactivities which support scientific research.Such an organizational structure would

1-27
dictate two separate operations teams withdistinct priorities and responsibilities yet thesame operational goal.
Systems operations are those tasks whichkeep elements of the program in operationalcondition and support productive utilizationof program resources. Thus, the systemsoperations team has responsibility forconducting the safe and efficient operation ofall such resources. The systems operationsteam consists of representatives from each ofthe primary systems (power, propulsion,environmental, electrical, etc.) which are usedthroughout the various mission phases.
The science operations team’s solefunction is to recommend, organize, and aidin conducting all activities which supportscientific research within the guidelines of themission objectives. The team will consist ofrepresentatives from the various sciencedisciplines (biology, medicine, astronomy,geology, atmospherics, etc.) which supportthe science and mission objectives. Eachscientific discipline will have an appropriatesupport team of personnel from government,industry, and academia who have expertise inthat field. The science operations team will actas the decision-making body for all scienceactivities—from determining which activitieshave highest priority to handling anddisseminating scientific data.
Crew and vehicle safety are always ofprimary concern. When those are ensured,science activities become the highest priority.To accommodate this hierarchy of prioritieswithin the operations management structure,
the overall operations manager should residewithin systems operations. A scienceoperations manager, who heads the scienceoperations team, should organizationally bein support of the operations manager. Variouslevels of interfaces between systems engineersand science team members must exist tomaximize the amount of science and missionobjectives that can be accomplished.
1.3.3.9 Mission and Systems Summary
To summarize, the major distinguishingcharacteristics of the Reference Missioninclude:
•No extended LEO operations, assembly,or fueling.
•No rendezvous in Mars orbit prior tolanding.
•Short crew transit times to and fromMars (180 days or less) and long surfacestay-times (500 to 600 days) for the firstand all subsequent crews exploringMars.
•A heavy lift launch vehicle capable oftransporting either crew or cargo directto Mars, and capable of delivering infour launches all needed payload for thefirst human mission and in threelaunches for each subsequentopportunity.
•Exploitation of indigenous resourcesfrom the beginning of the program, withimportant performance benefits andreduction of mission risk.
1-28
•Availability of abort-to-Mars surfacestrategies, based on the robustness of theMars surface capabilities and the cost oftrajectory aborts.
•Common transit/surface habitat design.
•Maintenance of a robust, safeenvironment for crews throughout theirexploration.
•Substantial autonomy of crew andsystem operations from ground control.
1.4 Testing Principal Assumptionsand Choices
A number of assumptions and choiceswere made in constructing this ReferenceMission. For each assumption, this sectionprovides a top-level trade analysis, therationale for the choice, and guidance tofurther research and development whichcould strengthen, improve, or change thechoice.
1.4.1 Robust Surface Infrastructure
The principal payoff from Marsexploration lies in surface capability—stay-time, crew safety, exploration range, andother factors that characterize the crew’sperformance environment. All dictate arobust infrastructure. The choice to land all ofthe payloads and crews at the same site onfour different opportunities was based on theassumption that the marginal cost ofadditional surface capability would be a cost-effective way to substantially increase theaccomplishment of the program.
Two different approaches have beenproposed in the past. The first is comparableto the Reference Mission by the long stay-timeon the martian surface. The second involves ashort stay-time (<30 days on the martiansurface) mission. Table 1-1 characterizesprincipal discriminators of the two scenarios.
In most studies, the short stay-timemissions have only been invoked for the firstmission; to develop long stay-time capabilitywould require close to total mission redesignand much higher cost for a continuedprogram.
The second alternative is to land eachcrew at a different location. This scenariowould be permitted by the capability definedin the Reference Mission. The principal trade-off is between the additional exploration thatmight be accomplished by exploring threedistant sites versus the benefits of building upthe capability to test settlement technologies(such as closed life support systems) and thereduced risk provided by accumulatingsurface assets at one site. As the range ofexploration provided in the single locationMars outpost is high (hundreds ofkilometers), the advantages of exploringseveral landing sites were considered of lowerpriority for the Reference Mission.
1.4.2 Split Mission Strategy
The split mission strategy takesadvantage of the currently availablecapability to successfully fly and landautomated spacecraft on another planet. Suchcapability can be used to deliver supplies and
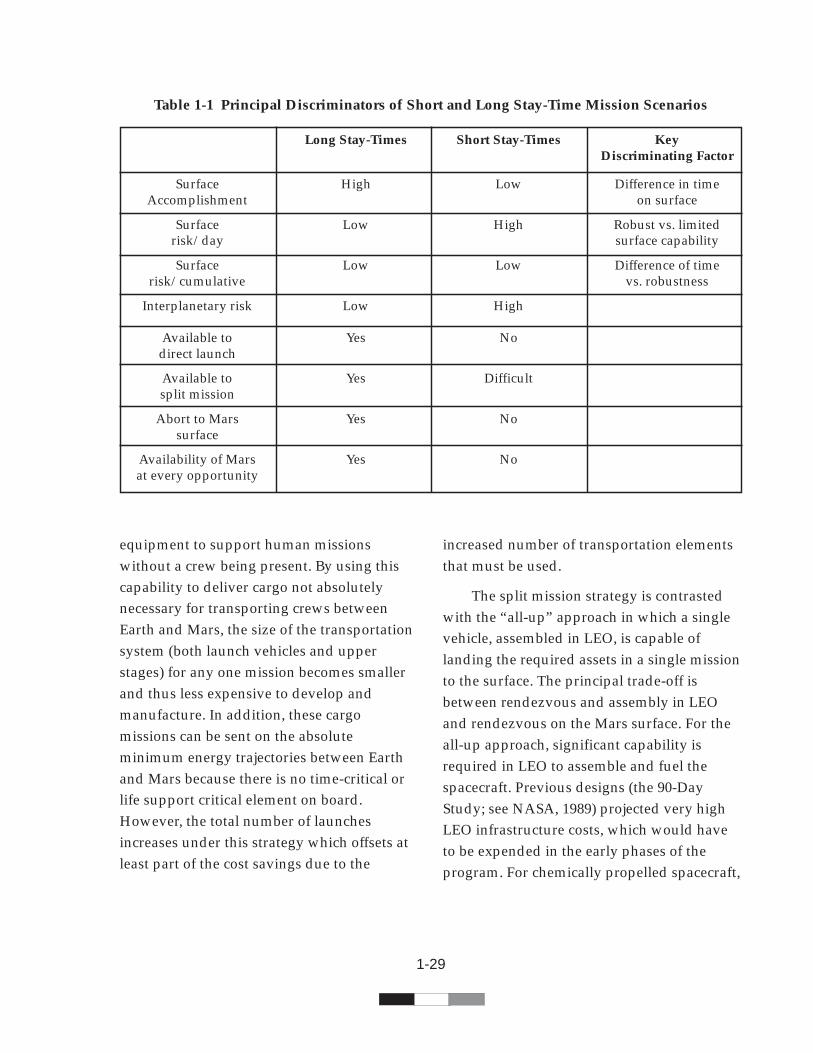
1-29
Table 1-1 Principal Discriminators of Short and Long Stay-Time Mission Scenarios
Long Stay-Times Short Stay-Times KeyDiscriminating Factor
Surface High Low Difference in timeAccomplishment on surface
Surface Low High Robust vs. limitedrisk/day surface capability
Surface Low Low Difference of timerisk/cumulative vs. robustness
Interplanetary risk Low High
Available to Yes Nodirect launch
Available to Yes Difficultsplit mission
Abort to Mars Yes Nosurface
Availability of Mars Yes Noat every opportunity
equipment to support human missionswithout a crew being present. By using thiscapability to deliver cargo not absolutelynecessary for transporting crews betweenEarth and Mars, the size of the transportationsystem (both launch vehicles and upperstages) for any one mission becomes smallerand thus less expensive to develop andmanufacture. In addition, these cargomissions can be sent on the absoluteminimum energy trajectories between Earthand Mars because there is no time-critical orlife support critical element on board.However, the total number of launchesincreases under this strategy which offsets atleast part of the cost savings due to the
increased number of transportation elementsthat must be used.
The split mission strategy is contrastedwith the “all-up” approach in which a singlevehicle, assembled in LEO, is capable oflanding the required assets in a single missionto the surface. The principal trade-off isbetween rendezvous and assembly in LEOand rendezvous on the Mars surface. For theall-up approach, significant capability isrequired in LEO to assemble and fuel thespacecraft. Previous designs (the 90-DayStudy; see NASA, 1989) projected very highLEO infrastructure costs, which would haveto be expended in the early phases of theprogram. For chemically propelled spacecraft,

1-30
the logistics of transporting, storing, andloading propellants was excessive andinevitably high in cost. Because the bestdeparture orbit at Earth is different for eachMars opportunity, the space-basedinfrastructure would have to be moved orreproduced, or additional propulsionpenalties be taken to modify the vehicle’sdeparture orbit for every launch to Mars. Theelimination of this element in the architectureprovides a significant cost reduction. It hasbeen assumed here that the capability of veryprecise landing on Mars can be developedtechnically, and that all assets for each flightcan be integrated on Earth and simply joinedon Mars. These capabilities can bedemonstrated on precursor robotic missions.
While the savings resulting from asmaller transportation system may not alonebe sufficient to invoke the use of the splitmission strategy, the strategy does enhanceanother assumed element of the ReferenceMission—the use of in situ resourceutilization. By splitting the missions intocargo and crew flights, infrastructure can beset up and operated before committing a crewto a flight to Mars. Operating thisinfrastructure for an extended period prior tolaunching a crew also improves theconfidence of using the Mars surface as a safehaven for the crew.
1.4.3 Nuclear Thermal Propulsion
High-performance propulsion is found tobe an enabling technology for a humanexploration program. Nuclear thermal
propulsion was selected because of its higherpropellant utilization efficiency and becausenuclear rockets were developed almost toflight status in the 1960s. For any givenvelocity change needed to depart from or becaptured at a planet, a nuclear thermal rocketuses approximately 50 percent less propellantthan the theoretical best chemical engine. (TheSpace Shuttle main engine is approaching thistheoretical upper limit.) The vast majority ofmass needed for a Mars mission is propellant,and any option that reduces the need forpropellant can lower the program life cyclecost by reducing the size and number oflaunch vehicles. Although such rockets mightbe expensive to test on Earth (the magnitudeof which has not been determined) withcurrent environmental concerns, their use inspace should not present an environmentalissue for they are dangerous only after firingthe engines for a significant period of time.Higher performance engines would be better,but typically require a large source ofelectrical power (from either a nuclear sourceor very large solar arrays) which calls foradditional development to reach the samelevel of maturity as nuclear thermal rockets.
1.4.4 In Situ Resource Utilization
This technology (assumed to be currentlyavailable) has been developed at breadboardlevel and can be demonstrated on roboticmissions. It provides significant benefits tothe mission by reducing launch mass fromEarth and increasing robustness of surfacesystems where caches of consumables and

1-31
surface vehicle fuels can be maintained. Asdiscussed in the previous section, anytechnology that can reduce the amount ofmass (and propellant is the largest single itemon such a list) can do much to reduce lifecycle cost. This is accomplished primarily byreducing the size and number of launchesfrom Earth and by providing a dual purposeinfrastructure that not only providespropellants for a return trip but also supportscrew activities and helps reduce risk.
1.4.5 Common Habitat Design
A common habitat was chosen for theReference Mission primarily to save on costover the life of the program. Because sevenseparate habitats will be required to supportthe three crews sent to Mars, this itembecomes a likely candidate for a commonapproach rather than designing, testing, andbuilding separate systems for theinterplanetary leg, the surface leg, and thetransition between the two. It may not befeasible to use a common design for all of thecomponents that make up a habitat. However,some of the significant elements—such as thepressure vessel (both primary and secondarystructure), electrical distribution, hatches, anddocking mechanisms—lend themselves to acommon approach. Inasmuch as these majorelements of the habitat can be defined andtheir cost estimated, a common design for thehabitats has been adopted for the ReferenceMission. A significant amount of work stillremains on definition and design of interiordetails of the habitats which will become partof future efforts associated with Mars mission
planning. Study team members were notunanimous in the choice of a common habitatfor space transit, for landing on the surface,and for surface habitation. Some argued that,due to the different requirements, a commondesign was not in the best interest of themission. This is an area for further research.
1.4.6 Nuclear Surface Power
With no known natural resources onMars that can be used to generate power, acrew exploring Mars must rely on eitherconverting solar radiation or using a powersource they have brought with them. WithMars lying, on average, 50 percent fartherfrom the Sun as Earth, only 44 percent asmuch solar radiation reaches that planet. Thismeans a crew must bring 2.25 times as muchsolar energy collecting and convertingsystems to generate the same amount ofpower as could be generated on Earth. Add tothis a day-night cycle (which requires theaddition of an energy charging and storagesystem) as well as martian dust storms (whichsignificantly diminish the amount of lightreaching the surface over extended periods oftime) and the size of a solar power station onMars becomes both large in area and massand subject to interruption or diminishedeffectiveness due to the dust storms. Of thosesources of energy that can be brought withthe crews, only a nuclear power source canconcentrate sufficient energy in a reasonablemass and volume. However, other concerns—environmental on Earth, operational on Mars,to name a few—are added to any mission thatconsiders the use of a nuclear power source.

1-32
Given these kinds of considerations, achoice was made to rely primarily on nuclearpower for systems operating on the martiansurface. Power provided by the solar arraysused during the transit to Mars will beavailable for backup and emergencysituations. However, the solar arrays will notbe sufficient to power the propellantmanufacturing plants that are also a keyfeature of this mission architecture.
1.4.7 Abort to the Surface
Mars missions differ from Space Shuttleand lunar missions in that once the crew iscommitted to launch, orbit mechanics forcethe crew to remain away from Earth forapproximately 2 to 3 years. This imposes onall of the systems the need for a higher degreeof reliability and maintainability or formultiple independent means of providinglife-critical functions (collectively referred toas robustness).
There has been a tendency to view themartian surface as the most hostile locationfor a crew during a Mars mission. However,of the three environments that a crew willencounter—Earth, interplanetary space, andthe martian surface—interplanetary spaceoffers the highest potential for debilitatingeffects on the crew. Practicality dictates arelatively small habitable space for the crewduring transit. To do otherwise causes acorresponding increase in the size and cost ofthe systems, primarily launch vehicles andtransfer stages, associated with thetransportation system. But to confine the crew
to a small habitable space for an extendedduration can lead to cabin fever. Zero g hasknown debilitating effects on the human bodythat must be addressed. Radiation from aconstant background and the threat of solarflares require that protection be adequate forbackground sources and that a safe haven beprovided for extreme events. All of thesethreats have engineering solutions that canmake the extended stay in interplanetaryspace a viable prospect for the crew. But thesolutions typically require increases in size,mass, and complexity of the vehicle and thetransportation elements that are used to moveit from planet to planet.
An alternate strategy, and one that wasselected for this Reference Mission, is to takeadvantage of the martian surface as a safehaven where open space, gravity, andradiation protection are naturally available.This strategy, referred to as “abort to thesurface,” builds on these naturally availableresources and breaks from the previousviewpoint of Mars as the most hostileenvironment encountered on the mission. Thereliability and maintainability of the systemsneeded to keep the crew alive on the surfaceis no greater than that imposed on space-based systems. In fact, the buildup of aninfrastructure at a single site on the surfaceenhances the safe haven character of themartian surface. This approach places agreater burden on the entry, landing, andmartian-based launch systems. However, thetrade-off of making these systems a viablepart of the abort strategy through increased

1-33
redundancy and reliability versus theenhancements needed to sustain a crewthrough a 2- to 3-year interplanetary aborthave tended to favor the abort to the surfacestrategy. The enhancements that will be madeto various systems to allow an abort to thesurface also work to the advantage of theoverall mission by improving the chances ofthe crews to successfully reach the surfaceand perform their exploration activities.
1.4.8 Design for the Most DifficultOpportunity
The design of the Reference Mission wasbased on the premise that a series of closelyspaced missions would result in costssignificantly lower than the sum of anequivalent number of single missions. Toachieve this cost savings requires that a singleset of systems be designed which canaccomplish the mission under the mostdifficult circumstances of any singleopportunity. The most significant of thesevariations results from trajectory differencesthat occur during sequential missionopportunities. As a result, some systems mayhave excess capability during some years.However, this allows the advantage of eitherlaunching more payload mass in those yearswith more favorable trajectories or reducingmission durations by flying shorter trajectorylegs, but at the expense of greater fuelconsumption. For example, in the 2009opportunity, transit times for piloted missionsare approximately 6 months; using the samesystems in the 2018 opportunity reducestransit times to just 4 months.
1.5 Conclusions and Recommendations
Based on both mission and programmaticpoints of view, a number of conclusions andrecommendations are made in the followingareas: mission and systems, technologydevelopment, environmental protection,program cost, international participation, andprogram management and organization.
1.5.1 Mission and Systems
Conclusions
A feasible mission scenario and suite ofvehicles and other systems have beenintegrated to meet the objectives initially setout for this study. In addition, the ReferenceMission addresses a long-standing issueregarding extended-duration flights and crewsafety by adopting a view that the surface ofMars is a safe haven and that equipment andprocedures should be developed with this inmind.
The Reference Mission includestechnology assumptions which requirefurther development and which contribute toan estimated development cost that is higherthan can currently be supported. Bothtechnology and cost must be addressed andthe alternative missions and systems couldresult in a better program for humanexploration of Mars. However, the missionand systems described here substantiallyreduce the program cost and at the same timepresent a more robust approach than inprevious studies of this subject.
1-34
Recommendations
•Use this study as an informal baselineagainst which future alternatives shouldbe compared.
•Continue investigating alternativemission scenarios and systems toimprove this Reference Mission, orsuggest a better alternative.
1.5.2 Technology Development
Conclusions
The Reference Mission was developedassuming advances in certain technologyareas thought to be necessary to send peopleto Mars for a reasonable investment in timeand resources. The Reference Mission is notintended to lock in these assumedtechnologies. The purpose of identifyingtechnologies at this time is to characterizethose areas that can either significantly reducethe required mass or cost of the program orsignificantly reduce its risks (for example, inthe area of fire safety). Alternative means ofsatisfying these requirements may beidentified and, if promising, should besupported. The alternatives could be theresult of a dual use development, spin offfrom other programs, or a fortunate “spillover” from some unexpected area.
At this particular stage in developinghuman exploration missions to Mars, it isdifficult to do more than speculate about spinoff and spill over technologies that couldresult from or be useful to this endeavor.However, identifying dual uses for some of
the assumed technologies can be started nowand, to a certain degree, may be required forsuch a program to progress. In the currentpolitical environment, investment intechnology is seen as a means of improvingthe general quality of life for people on Earth,and multiple use of technologies isemphasized to obtain the best return on theresources invested in their development. Thefollowing is a list of twelve technologieswhich are important to space transportation,humans living in space or on a planetarysurface, or the utilization of extraterrestrialresources.
Resource Utilization
•Extraterrestrial mining techniques
•Resource extraction process andchemistry
•Material preparation and handling inreduced gravity
•Extraterrestrial manufacturing
Transportation and Propulsion
•Advanced chemical systems that providehigh performance and are compatiblewith the resources available on the Moonand Mars
•Nuclear propulsion to enable short triptimes to Mars
•Aerocapture/aerobraking at the Earthand at Mars for propulsive efficiencyand reusable systems
•Lightweight/advanced structures
• Reduced-g combustors

1-35
Cryogenic Fluid Management
•Long-term (years) storage in space
•Lightweight and high efficiencycryogenic liquefaction
•Zero g and microgravity acquisition,transfer, and gauging
EVA Systems
•Lightweight, reserviceable, andmaintainable suit and PLSS
•Durable, lightweight, high mobility suitsand gloves
Regenerative Life Support Systems
•Contamination and particle control
•Loop closure
•Introduction of locally producedconsumables
•Food production
•Trash and waste collection andprocessing
•High efficiency and lighter weight activethermal control systems
Surface Habitation and Construction
•Lightweight structures
•Seal materials and mechanisms
•Construction techniques using localmaterials
Human Health and Performance
•Zero-g adaptation and countermeasures
•Human factors
•Health care at remote locations
•Radiation protection in transit and onsurface
Power Generation and Storage
•Long life, lighter weight, and less costlyregenerative fuel cells
•Surface nuclear power of the order of100kw
•High efficiency solar arrays
Teleoperations/Telerobotics
•Remote operations with long time delays
•Fine control manipulators to supportwide range of surface activities
•Telepresence sensors and displays
Planetary Rovers
•Long range (hundreds of km) rovers
•Motor lubricants (long-term use)
•Dust control
•High efficiency lightweight powergeneration and storage
Advanced Operations
•Automated systems control
•Systems management and scheduling
•Simulations and training at remotelocations
Fire Safety
•Fire prevention
•Fire detection
•Fire suppression
1-36
Some of these technologies (such asnuclear thermal propulsion, Mars surfacespace suits, and in situ resource extraction), atthe system level, are unique to the ReferenceMission or to human space exploration ingeneral. It is likely that NASA or cooperatinginternational partners will have to bear theburden for support of this research anddevelopment. The Reference Mission, as it isdescribed here, will fail if these systems arenot advanced to a usable state. Other areas,such as medical countermeasures, closed-looplife support systems, autonomous operationssystems, surface power systems, and surfacemobility, may be of more general interest andmay provide opportunities for governmentand industry to develop shared programs. Instill other areas, such as long-lived electronicsand materials research, where the underlyingresearch will probably be done by industry toaddress general problems of technologydevelopment, NASA or the internationalpartners should focus on infusing thattechnology. The exchange of informationshould be continuous between NASA and thecommercial sector particularly concerning theneeds of future missions, so that industry canincorporate research into its privately fundedprograms where it is justified. In all areas,subsystem or component technologies may bedeveloped by industry to meet commercialrequirements, and the Mars Program willneed to have processes that allow the elementdesigners to use the most advancedcapabilities available.
Recommendations
•Establish a Mars Program Office(discussed further under InternationalParticipation and Management andOrganization) early in the process (now,probably) at a low level to lay thefoundation for technology requirementsto be undertaken by NASA or othergovernment agencies with similarrequirements. Formal organizationalagreements should exist between theseoffices if the technology development isnot formally assigned to the ProgramOffice.
•Rank technology investments accordingto their return to the Program, as eithercost or risk reductions.
•Prior to initiation of the ReferenceMission, take critical technologies to ademonstration stage. NASA shouldensure that experimental work insupport of the Reference Mission isincorporated into the International SpaceStation program at the earliestreasonable time.
•Create a database (in the Program Office)of available technologies that can beused in design studies, and track theprogress of these technologies. Thedatabase should include domestic andinternational capabilities.

1-37
1.5.3 Environmental Protection
Conclusions
Fundamental principles of planetaryenvironmental protection have beendeveloped since the first planetaryexploration missions began in the 1960s. Withrespect to Mars, the principles adopted by theinternational scientific community arestraightforward: Mars should be protectedfrom biological contamination from Earth thatwould interfere with or confound the searchfor natural martian organisms, and Earthmust be protected from contamination bymartian organisms harmful to the terrestrialbiosphere. The United States is signatory to atreaty under the auspices of the Committee onSpace Research (COSPAR) which provides thebasic framework for its Planetary Protectionpolicy and program (COSPAR 1964 andUnited Nations 1967).
Planetary protection will be an ongoingdiscussion at an international level. Thepolicy principles stated here and those thatevolve in the future must be carried along assignificant requirements for mission planningand system design.
A further political concern isunfortunately tied to the planet Mars. Asignificant portion of the popular press andthe entertainment industry is devoted tospeculation about life, intelligent andotherwise, that may exist beyond the planetEarth. Percival Lowell, H. G. Wells, OrsenWells, and others have placed Mars in theforefront of possible locations for
extraterrestrial life. NASA itself hascontributed to this perception by supportinglegitimate scientific research in this area.Because it is not possible to prove that Mars iscompletely devoid of life, there is thepotential for misinterpretation ormisunderstanding when martian materialsand human crews are brought back to Earth.For example, an ailment (regardless of thesource) among a returning human crew couldgive rise to speculation that the crew hassome unknown Mars “bug” and is about toexpose the rest of the human population to itseffects.
Recommendations
•Develop adequate and acceptablehuman quarantine and sample handlingprotocols early in a Mars explorationprogram. The protocols must addressnot only the purely scientific concerns tomaintain the pristine nature of samplesbut also the societal concerns, real orimagined, that are likely to arise.
•Include the protocols as program-levelrequirements for mission and systemdevelopment.
•Publicly release for review (byindependent authoritative bodies) theprinciples and practices ofcontamination control in effect for Marsmissions.

1-38
1.5.4 Program Cost
Conclusions
The cost of the Reference Mission wasestimated using standard models. Input forthese models was derived from previousexperience and information provided bymembers of the Study Team. Included in theestimate were the development andproduction costs for all of the systems neededto support three human crews as they exploreMars. In addition, ground rules andassumptions were adopted that incorporatedsome new management paradigms, asdiscussed later in the Program Managementand Organization section. The managementcosts captured program level management,integration, and a Level II function. Typicalpre-production costs, such as Phase A and Bstudies, were also included.
Not included in the cost estimate wereselected hardware elements, operations, andmanagement reserve. Hardware costs notestimated include science equipment and EVAsystems, for which data were not available atthe time estimates were prepared; however,these are not expected to add significantly tothe total. No robotic precursor missions areincluded in the cost estimate although theirneed is acknowledged as part of the overallapproach to the Reference Mission.Operations costs have historically been ashigh as 20 percent of the development cost.However, due to the extended operationalperiod of the Reference Mission and therecognized need for new approaches to
managing and running this type of program,estimating the cost for this phase of theprogram was deferred until an approach isbetter defined. Similarly, the issue ofmanagement reserve was not addressed untila better understanding of the managementapproach and controls has been developed.
When compared to earlier estimates of asimilar scale (NASA, 1989), the cost for theReference Mission is approximately an orderof magnitude lower. A distribution of thesecosts is shown in Figure 1-6. It can be seenfrom this figure that the major cost drivers arethose associated with the transportationelements: the ETO launch vehicles, the TMIstages, and the Earth-return systems.
The Mars Study Team recognizes that,even with the significant reduction in theprogram cost achieved by this Team, theReference Mission is probably still tooexpensive in today’s fiscal environment. Morework to further reduce these costs is needed.
Recommendation
•Seek alternative solutions or effectiveapproaches to cost reduction in each ofthe areas cited above. The efforts mayrequire revolutionary changesthroughout NASA, the aerospaceindustry, the United States, and theworld.
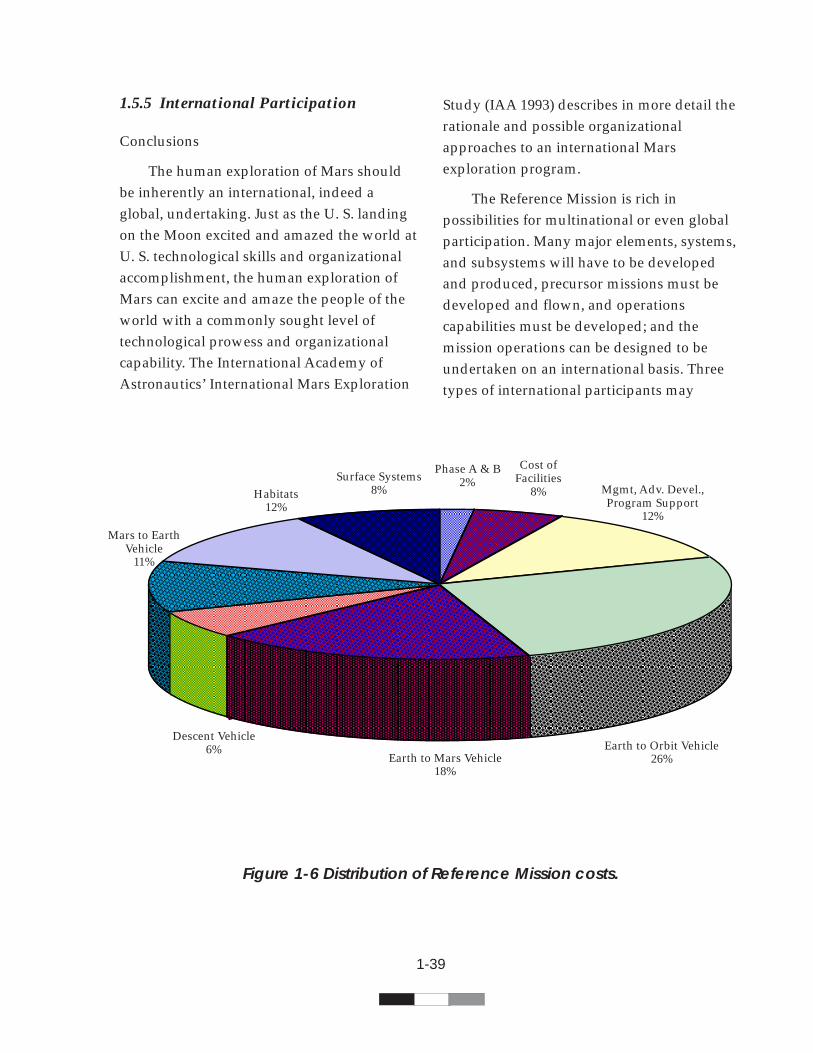
1-39
1.5.5 International Participation
Conclusions
The human exploration of Mars shouldbe inherently an international, indeed aglobal, undertaking. Just as the U. S. landingon the Moon excited and amazed the world atU. S. technological skills and organizationalaccomplishment, the human exploration ofMars can excite and amaze the people of theworld with a commonly sought level oftechnological prowess and organizationalcapability. The International Academy ofAstronautics’ International Mars Exploration
Study (IAA 1993) describes in more detail therationale and possible organizationalapproaches to an international Marsexploration program.
The Reference Mission is rich inpossibilities for multinational or even globalparticipation. Many major elements, systems,and subsystems will have to be developedand produced, precursor missions must bedeveloped and flown, and operationscapabilities must be developed; and themission operations can be designed to beundertaken on an international basis. Threetypes of international participants may
Surface Systems8%
Phase A & B2%
Habitats12%
Cost ofFacilities
8% Mgmt, Adv. Devel.,Program Support
12%
Figure 1-6 Distribution of Reference Mission costs.
Earth to Orbit Vehicle26%Earth to Mars Vehicle
18%
Descent Vehicle6%
Mars to EarthVehicle
11%

1-40
contribute based on the ability to provideresources and participate technically in theprogram.
•Countries with limited resources andtechnical base. Their participation couldbe linked to technology transfer to theircountries, which could improve the levelof technical education and takeadvantage of technical internship in theendeavor. These relationships might besimilar to the participation of Cuba orViet Nam in the Russian space program.
•Countries with greater amounts ofresources and technical base. Theirparticipation would reflect technicalinterest in limited areas targeted fortechnical or industrial growth in theireconomies. The participation of Canadain the International Space Stationprogram is an example.
•Countries with substantial resources andtechnical base. Their participation wouldreflect a desire to demonstrate worldleadership, retain broad technologicalskills, and promote aerospace industry.The major contributors to theInternational Space Station program fallinto this category.
All participating countries should expectto gain in proportion to their investment inthe enterprise; richer countries might viewthe program as an opportunity to help poorercountries improve their standards of livingthrough stimulation and transfer of moderntechnology and technological training.
The ranges of opportunities and interestsare large and must be well understood beforean international program is constructed. Thediscussions may be iterative with respect toinitial design in order to optimize thecollective returns to all nations in theprogram, and it is not unlikely that 10 yearswould be needed to formulate the principlesand agreements needed to undertake theprogram. It is important that thesediscussions lead to a set of basic principlesunder which the program will be designedand implemented.
Recommendations
•Make the human exploration of Marsprogram international from its inception,and take as a basic principle that allpartners will have a voice in all phases ofthe program in proportion to theresources contributed to the program.
•Do not exclude any nation even thoughtheir participation might be small ineconomic terms.
•Create a forum in the near future fordiscussion of the elements of aninternational program to lay the basis forinternational participation.
•Create an International Program Office(sensitive to political and technicalissues) to lead the design effort. Just as itis important to have all of the designrequirements understood prior todevelopment, all of the politicalrequirements must also be understoodearly in the process.
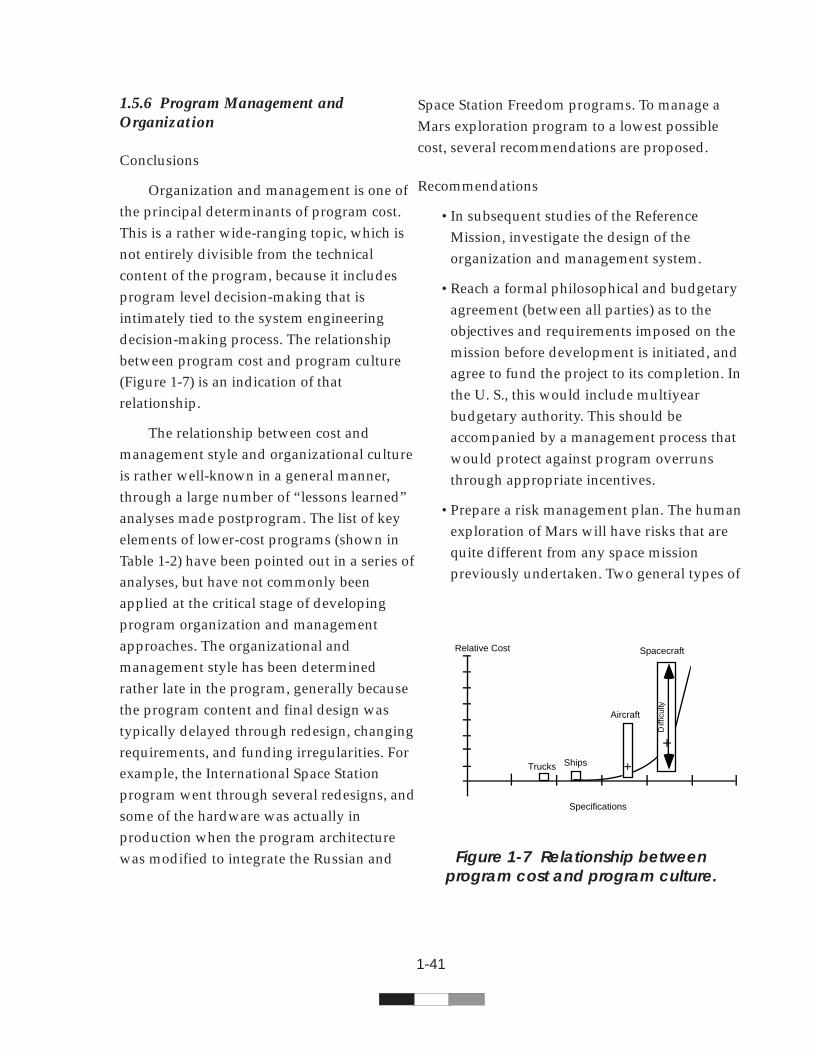
1-41
1.5.6 Program Management andOrganization
Conclusions
Organization and management is one ofthe principal determinants of program cost.This is a rather wide-ranging topic, which isnot entirely divisible from the technicalcontent of the program, because it includesprogram level decision-making that isintimately tied to the system engineeringdecision-making process. The relationshipbetween program cost and program culture(Figure 1-7) is an indication of thatrelationship.
The relationship between cost andmanagement style and organizational cultureis rather well-known in a general manner,through a large number of “lessons learned”analyses made postprogram. The list of keyelements of lower-cost programs (shown inTable 1-2) have been pointed out in a series ofanalyses, but have not commonly beenapplied at the critical stage of developingprogram organization and managementapproaches. The organizational andmanagement style has been determinedrather late in the program, generally becausethe program content and final design wastypically delayed through redesign, changingrequirements, and funding irregularities. Forexample, the International Space Stationprogram went through several redesigns, andsome of the hardware was actually inproduction when the program architecturewas modified to integrate the Russian and Figure 1-7 Relationship between
program cost and program culture.
Space Station Freedom programs. To manage aMars exploration program to a lowest possiblecost, several recommendations are proposed.
Recommendations
•In subsequent studies of the ReferenceMission, investigate the design of theorganization and management system.
•Reach a formal philosophical and budgetaryagreement (between all parties) as to theobjectives and requirements imposed on themission before development is initiated, andagree to fund the project to its completion. Inthe U. S., this would include multiyearbudgetary authority. This should beaccompanied by a management process thatwould protect against program overrunsthrough appropriate incentives.
•Prepare a risk management plan. The humanexploration of Mars will have risks that arequite different from any space missionpreviously undertaken. Two general types of
Relative Cost Spacecraft
Aircraft
ShipsTrucks
Specifications
+
Diff
icul
ty
+
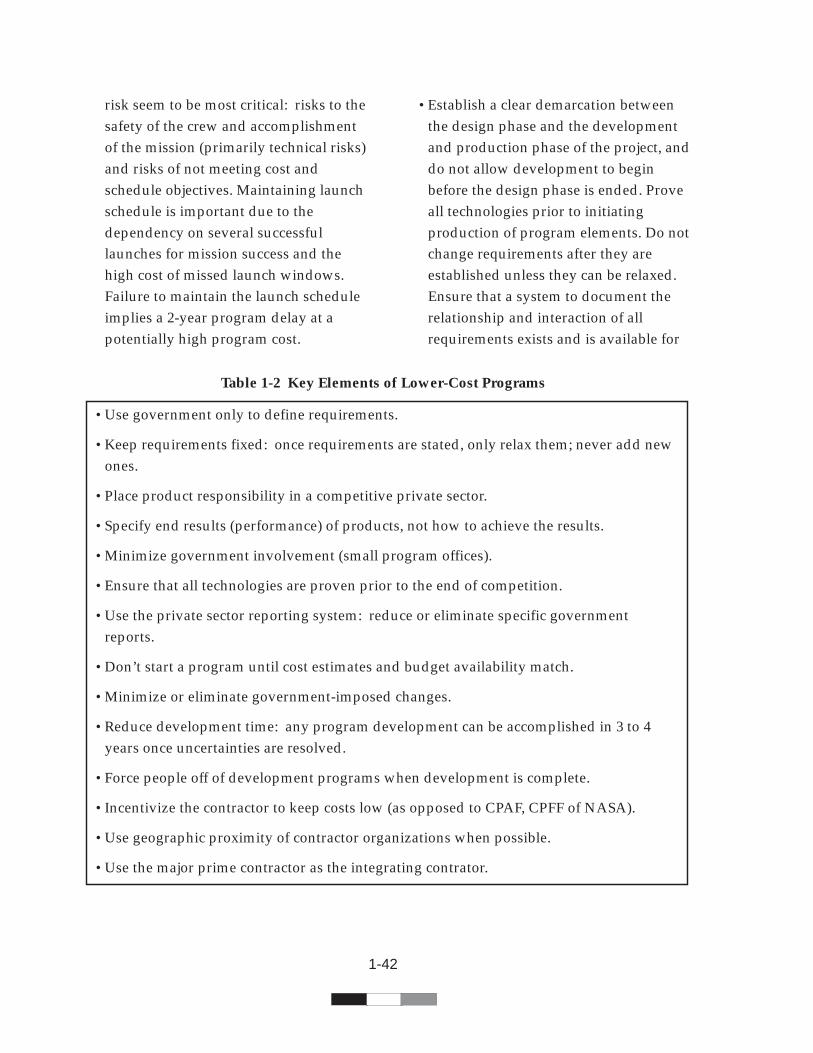
1-42
risk seem to be most critical: risks to thesafety of the crew and accomplishmentof the mission (primarily technical risks)and risks of not meeting cost andschedule objectives. Maintaining launchschedule is important due to thedependency on several successfullaunches for mission success and thehigh cost of missed launch windows.Failure to maintain the launch scheduleimplies a 2-year program delay at apotentially high program cost.
•Establish a clear demarcation betweenthe design phase and the developmentand production phase of the project, anddo not allow development to beginbefore the design phase is ended. Proveall technologies prior to initiatingproduction of program elements. Do notchange requirements after they areestablished unless they can be relaxed.Ensure that a system to document therelationship and interaction of allrequirements exists and is available for
Table 1-2 Key Elements of Lower-Cost Programs
•Use government only to define requirements.
•Keep requirements fixed: once requirements are stated, only relax them; never add newones.
•Place product responsibility in a competitive private sector.
•Specify end results (performance) of products, not how to achieve the results.
•Minimize government involvement (small program offices).
•Ensure that all technologies are proven prior to the end of competition.
•Use the private sector reporting system: reduce or eliminate specific governmentreports.
•Don’t start a program until cost estimates and budget availability match.
•Minimize or eliminate government-imposed changes.
•Reduce development time: any program development can be accomplished in 3 to 4years once uncertainties are resolved.
•Force people off of development programs when development is complete.
•Incentivize the contractor to keep costs low (as opposed to CPAF, CPFF of NASA).
•Use geographic proximity of contractor organizations when possible.
•Use the major prime contractor as the integrating contrator.

1-43
use prior to the beginning of production.The Reference Mission requires anumber of elements, many of which aretechnically alike but serve somewhatdifferent functions over the duration ofthe program. For example, the surfacehabitat may be the basis for the transithabitat; each of the habitats delivered tothe surface will have a differentcomplement of equipment and supplies,according to its position in the deliverysequence. The elements will bedeveloped over a period of several years,and there will be a temptation toimprove the equipment and supplymanifest. To maintain cost control for theprogram, requirements must be fixed atthe time of initial development.
•Provide clear requirements for thedesign phase, describing theperformance expected and a clear set ofcriteria for completeness of design as afunction of resources expended indesign. Use a significant design costmargin to manage the design resources.Terminate the project if a satisfactorydesign cannot be accomplished withinthe available resources. Further, selectthe successful prime contractor asintegration contractor for thedevelopment phase, and exclude theprime contractor as a developmentcontractor. The design phase of theprogram is critical to successful costcontrol, and should be based on a set offunctional requirements established bythe Program Office (which may well be a
multinational activity). The ProgramOffice will be in place to managetechnical requirements, providedecisions that require consultation andtrade-offs (both technical and political),and manage development contracts. TheProgram Office should establishfunctional requirements for the designphase and conduct a competitiveprocurement for the design phase, withthe selection of a prime contractor.
•Prepare a specific construction sequenceand plan to accompany each productionelement of the program. Oncecommitted to development, thedevelopment time should be strictlylimited if costs are to be contained. Thiswill be difficult in the Mars program,where it probably will be effective toproduce common elements sequentiallyrather than all at one time, althoughthere may be a high enough productionrate that costs will drop as experience isgained. A new approach will be neededto ensure that the development time foreach individual element is strictlylimited.
•Make the two levels of integration,program and launch package, theresponsibility of a single organization—aprime contractor to the Program Office.The program will require two levels ofintegration, similar to that of theInternational Space Station program: aprogram level which ensures that overallmission requirements are met at each

1-44
stage of the mission, that is, for thepackages assembled for each launchopportunity; and a launch package levelintegration, in which all requiredelements of each launch to Mars arepackaged and their performanceensured.
•Include operational considerations in thedesign and development phases of theprogram, and use life cycle costs forprogram design and developmentdecisions. The operational phase of theMars program must be represented inthe design and development phase. Thiswill require a concurrent engineeringapproach which considers theoperational costs as well as thedevelopment costs in a life cycle costapproach to the program. If theapproaches identified above to separatedesign and development and to obtainprior commitments for funding for theentire program are successful, thereshould be less of a problem maintainingthe life cycle cost approach tominimizing program costs.
•Put into place positive incentives tomaintain program costs within approvedlevels at all stages of design,development, production, andoperations, and to reduce costs of eachphase of the program.
1.6 References
Borowski, S. K., R. R. Corban, M. L.McGuire, and E. G. Beke, “NuclearThermal Rocket/Vehicle Design Optionsfor Future NASA Missions to the Moonand Mars,” NASA TechnicalMemorandum 107071, 1993.
Committee on Space Research (COSPAR),“Statement on the Potentially HarmfulEffects of Space Experiments Concerningthe Contamination of Planets,” COSPARInformation Bulletin No. 20, pp. 25-26,Geneva, Switzerland, 1964.
Duke, M. and N. Budden, “Results,Proceedings and Analysis of the MarsExploration Workshop,” JSC-26001,NASA, Johnson Space Center, Houston,Texas, August 1992.
International Academy of Astronautics(IAA), “International Exploration of Mars:A Mission Whose Time Has Come,” ActaAstronautica, Vol. 31, pp. 1-101, New York,USA, October 1993.
United Nations, “Treaty on PrinciplesGoverning the Activities of States in theExploration and Use of Outer Space,Including the Moon and Other CelestialBodies,” U.N Document A/RES/2222/(XXI), TIAS #6347, New York, USA,January 1967.
NASA, "Report of the 90-Day Study onHuman Exploration of the Moon andMars," NASA Headquarters, Washington,DC, November 1989.
1-45
Synthesis Group, “America at theThreshold: Report of the Synthesis Groupon America’s Space ExplorationInitiative,” U.S. Government PrintingOffice, Washington DC, May 1991.
Zubrin, Robert, “Mars Direct: A Simple,Robust, and Cost Effective Architecturefor the Space Exploration Initiative,”29thAerospace Sciences Meeting, AIAA 91-0326, held in Reno, Nevada, January 7-10,1991.

2-1
2. Science andExploration Rationale

2-2

2-3
2.1 Introduction
Mars is an intriguing and exciting planetwith many adventures and discoveriesawaiting planetary explorers. But before wego, we must provide the tools the explorerswill use, anticipate as much as possible thesituations they will encounter, and preparethem for the unexpected. For the first time ina space exploration mission, it will be up tothe crew and supporting personnel on Earthto create specific activities as the missionprogresses and discoveries are made. Thelength of time spent on the martian surface, aspresented in the Reference Mission, willpreclude development of the detailed, highlychoreographed mission plans typical oftoday’s space missions. The crew will havegeneral goals and objectives to meet withintheir other time constraints (for example,exercise for health maintenance, regularmedical checks, routine systems maintenance,etc.). Based on knowledge gained fromprecursor robotic missions, the crew will landin an area that has a high probability ofsatisfying the pre-set mission objectives.However, due to the extendedcommunications time lag between Earth andMars, the crews and their systems must beable to accomplish objectives in a highly
autonomous manner with only generalsupport from Earth. From the rationalegenerated by the Mars Study Team forsending human crews to Mars, goals andobjectives are derived to provide guidance forthe exploration crews during their extendedstay on the martian surface. This section willdiscuss that Study Team rationale.
2.2 The “Why Mars” Workshop
In August 1992, a workshop was held atthe Lunar and Planetary Institute in Houston,Texas, to address the “whys” of Marsexploration. This workshop brought togethera group of experts (listed in Table 2-1) familiarwith the key issues and past efforts associatedwith piloted Mars missions in an effort toprovide the top-level rationale andrequirements from which the Marsexploration program could be built (Dukeand Budden, 1992). This group was asked togenerate three key products: a Mars missionrationale, Mars exploration objectives, and alist of key issues and constraints, to be usedby the Mars Study Team (members listed inTable 2-2) to define the technical details of aReference Mission. The workshop attendeesidentified six major elements of the rationalefor a Mars exploration program.
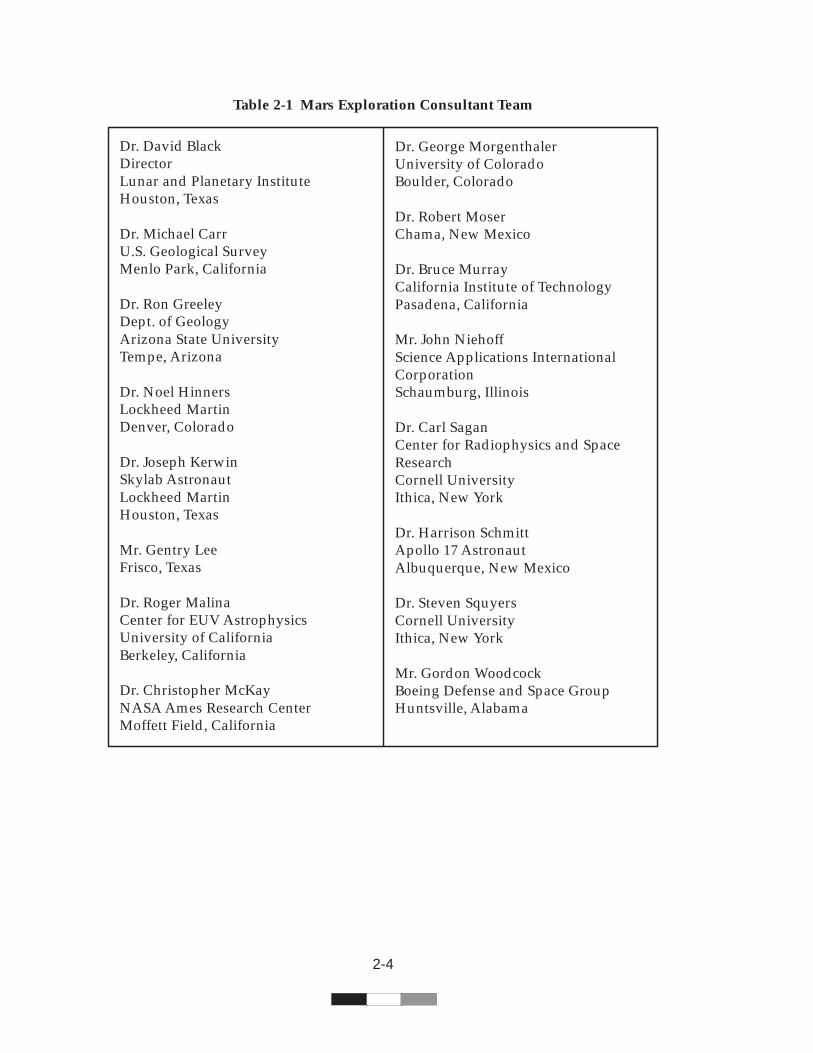
2-4
Table 2-1 Mars Exploration Consultant Team
Dr. George MorgenthalerUniversity of ColoradoBoulder, Colorado
Dr. Robert MoserChama, New Mexico
Dr. Bruce MurrayCalifornia Institute of TechnologyPasadena, California
Mr. John NiehoffScience Applications InternationalCorporationSchaumburg, Illinois
Dr. Carl SaganCenter for Radiophysics and SpaceResearchCornell UniversityIthica, New York
Dr. Harrison SchmittApollo 17 AstronautAlbuquerque, New Mexico
Dr. Steven SquyersCornell UniversityIthica, New York
Mr. Gordon WoodcockBoeing Defense and Space GroupHuntsville, Alabama
Dr. David BlackDirectorLunar and Planetary InstituteHouston, Texas
Dr. Michael CarrU.S. Geological SurveyMenlo Park, California
Dr. Ron GreeleyDept. of GeologyArizona State UniversityTempe, Arizona
Dr. Noel HinnersLockheed MartinDenver, Colorado
Dr. Joseph KerwinSkylab AstronautLockheed MartinHouston, Texas
Mr. Gentry LeeFrisco, Texas
Dr. Roger MalinaCenter for EUV AstrophysicsUniversity of CaliforniaBerkeley, California
Dr. Christopher McKayNASA Ames Research CenterMoffett Field, California
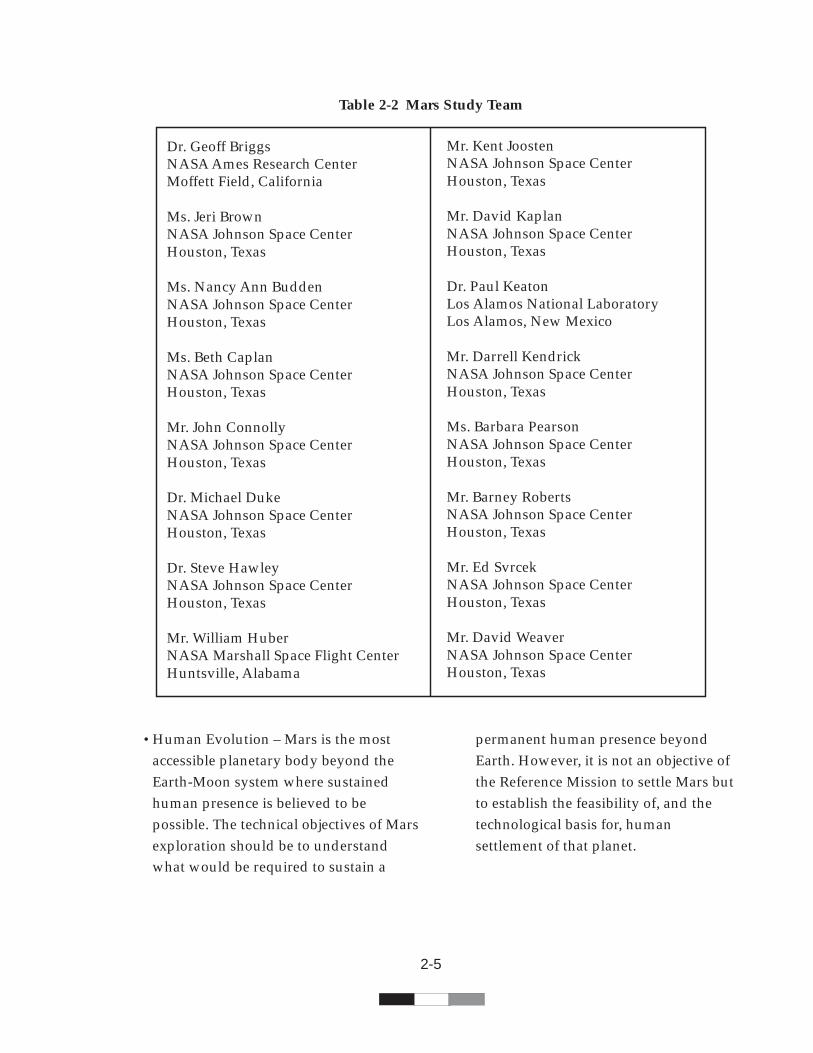
2-5
Table 2-2 Mars Study Team
Dr. Geoff BriggsNASA Ames Research CenterMoffett Field, California
Ms. Jeri BrownNASA Johnson Space CenterHouston, Texas
Ms. Nancy Ann BuddenNASA Johnson Space CenterHouston, Texas
Ms. Beth CaplanNASA Johnson Space CenterHouston, Texas
Mr. John ConnollyNASA Johnson Space CenterHouston, Texas
Dr. Michael DukeNASA Johnson Space CenterHouston, Texas
Dr. Steve HawleyNASA Johnson Space CenterHouston, Texas
Mr. William HuberNASA Marshall Space Flight CenterHuntsville, Alabama
Mr. Kent JoostenNASA Johnson Space CenterHouston, Texas
Mr. David KaplanNASA Johnson Space CenterHouston, Texas
Dr. Paul KeatonLos Alamos National LaboratoryLos Alamos, New Mexico
Mr. Darrell KendrickNASA Johnson Space CenterHouston, Texas
Ms. Barbara PearsonNASA Johnson Space CenterHouston, Texas
Mr. Barney RobertsNASA Johnson Space CenterHouston, Texas
Mr. Ed SvrcekNASA Johnson Space CenterHouston, Texas
Mr. David WeaverNASA Johnson Space CenterHouston, Texas
•Human Evolution – Mars is the mostaccessible planetary body beyond theEarth-Moon system where sustainedhuman presence is believed to bepossible. The technical objectives of Marsexploration should be to understandwhat would be required to sustain a
permanent human presence beyondEarth. However, it is not an objective ofthe Reference Mission to settle Mars butto establish the feasibility of, and thetechnological basis for, humansettlement of that planet.

2-6
•Comparative Planetology – The scientificobjectives of Mars exploration should beto understand the planet and its historyto better understand Earth.
•International Cooperation – The politicalenvironment at the end of the Cold Warmay be conducive to a concertedinternational effort that is appropriate,and may be required, for a sustainedprogram.
•Technology Advancement – The humanexploration of Mars currently lies at theragged edge of achievability. Some of thetechnology required to achieve thismission is either available or on thehorizon. Other technologies will bepulled into being by the needs of thismission. The new technologies or thenew uses of existing technologies willnot only benefit humans exploring Marsbut will also enhance the lives of peopleon Earth.
•Inspiration – The goals of Marsexploration are bold, are grand, andstretch the imagination. Such goals willchallenge the collective skill of thepopulace mobilized to accomplish thisfeat, will motivate our youth, will drivetechnical education goals, and will excitethe people and nations of the world.
•Investment – In comparison with otherclasses of societal expenditures, the costof a Mars exploration program ismodest.
The workshop attendees then translatedthese elements into two specific missionobjectives. For the first human exploration ofMars:
•A better understanding is needed ofMars—the planet, its history, and itscurrent state. And to answer, as best aspossible, the scientific questions thatexist at the time of the exploration, abetter understanding of the evolution ofMars’ climate and the search for past lifeare pressing issues.
•It is important to demonstrate that Marsis a suitable location for longer termhuman exploration and settlement.
The following sections discuss the detailsof the science and exploration rationale asapplied to the Reference Mission.Implementation details are in Section 3.
2.3 Science Rationale
Mars is an intriguing planet in part forwhat it can tell us about the origin and historyof planets and of life. Visible to the ancientsand distinctly reddish in the night sky, it hasalways been an attractive subject forimaginative science fiction. As the capabilityfor space exploration grew in the 1960s, itbecame clear that, unlike Earth, Mars is not aplanet teeming with life and has a harshenvironment. The images of Mariner 4showed a Moon-like terrain dominated bylarge impact craters (Figure 2-1).
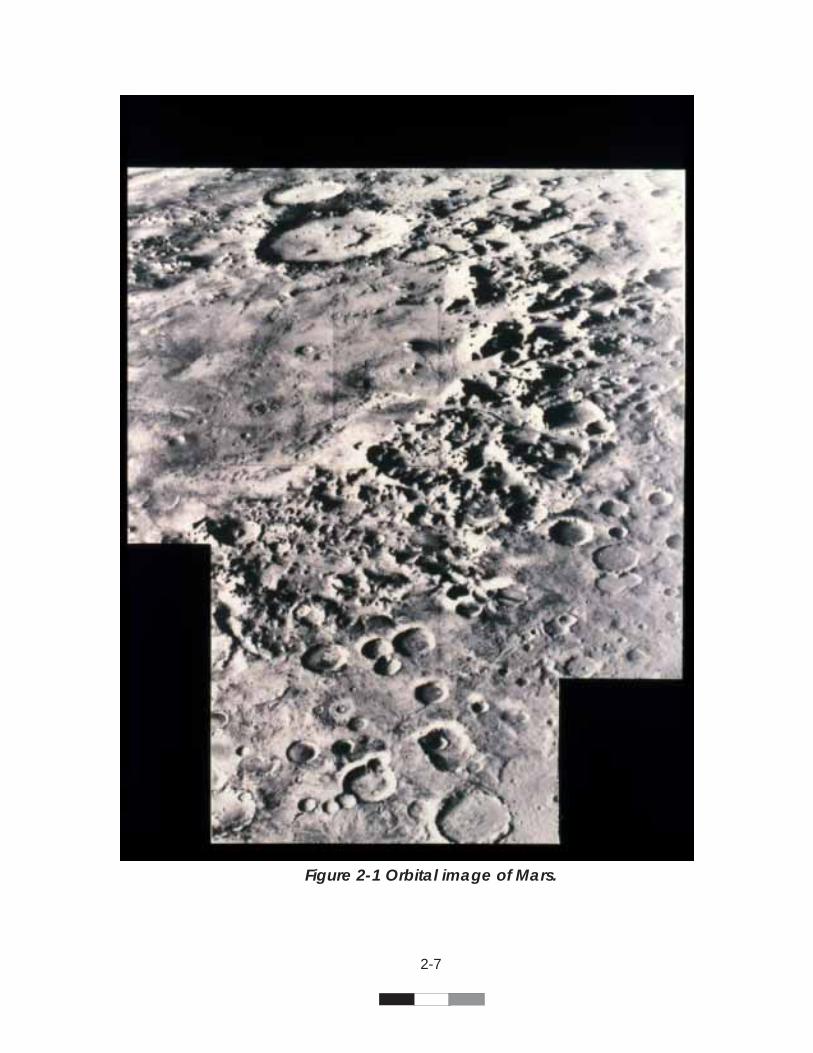
2-7
Figure 2-1 Orbital image of Mars.
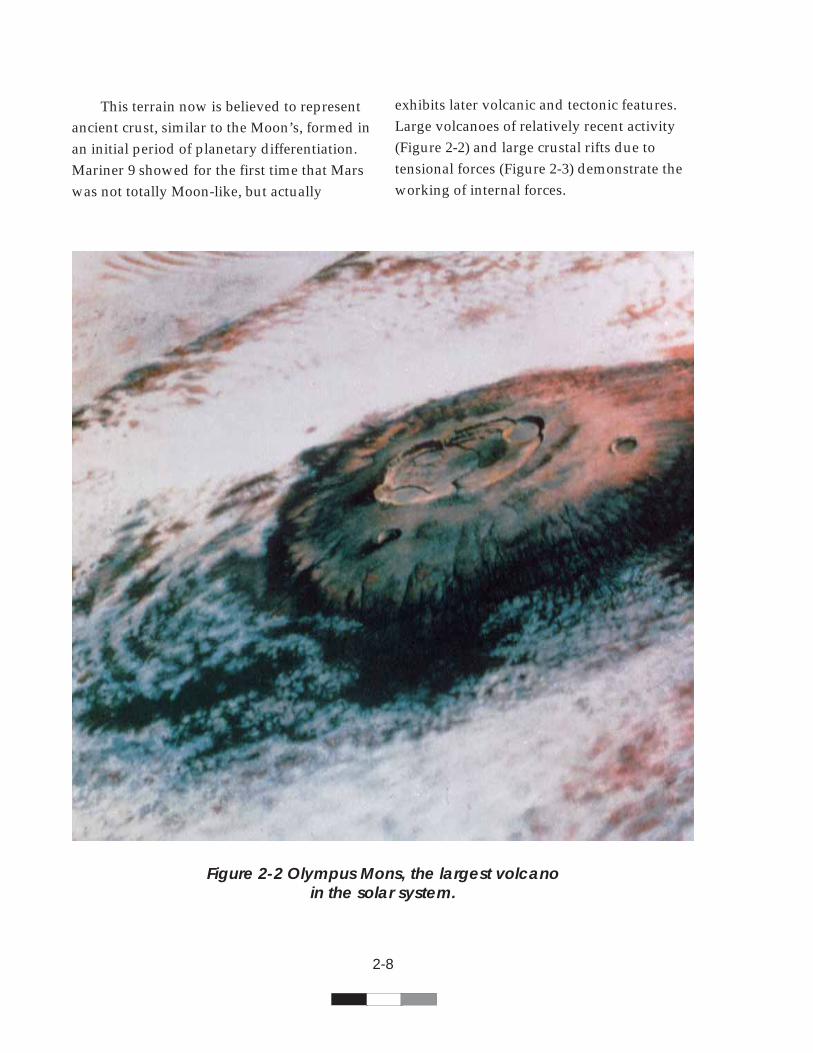
2-8
This terrain now is believed to representancient crust, similar to the Moon’s, formed inan initial period of planetary differentiation.Mariner 9 showed for the first time that Marswas not totally Moon-like, but actually
exhibits later volcanic and tectonic features.Large volcanoes of relatively recent activity(Figure 2-2) and large crustal rifts due totensional forces (Figure 2-3) demonstrate theworking of internal forces.
Figure 2-2 Olympus Mons, the largest volcanoin the solar system.
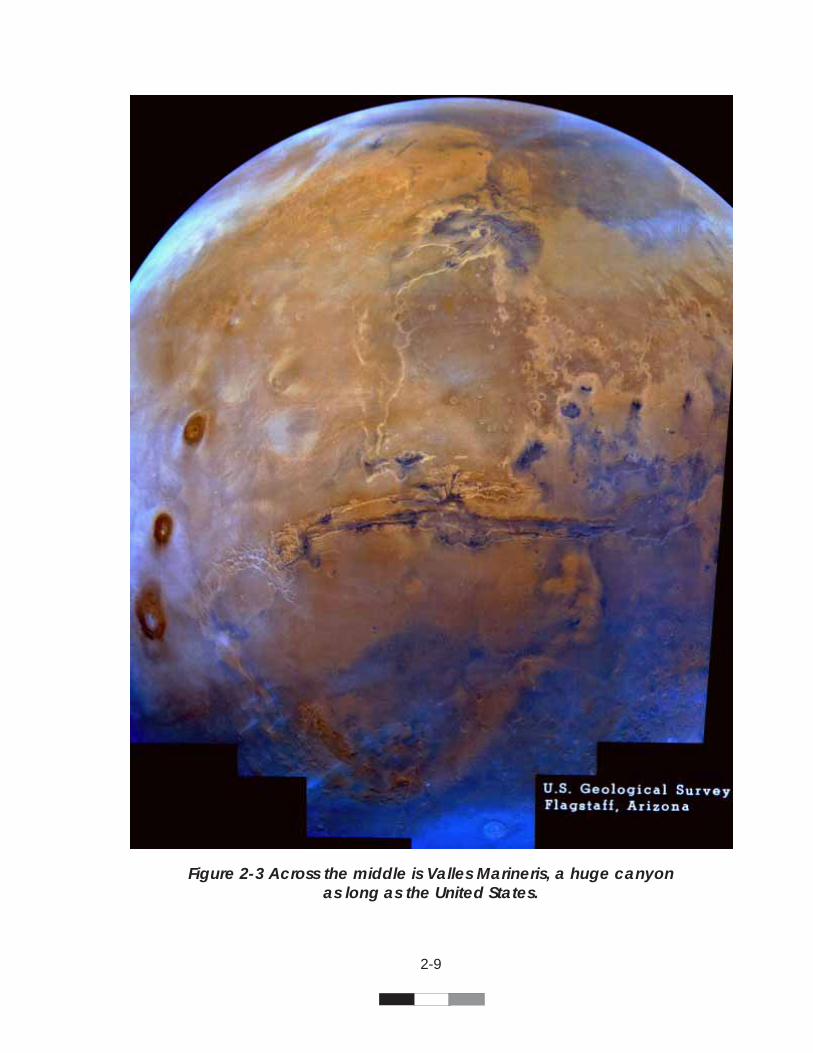
2-9
Figure 2-3 Across the middle is Valles Marineris, a huge canyonas long as the United States.

2-10
The absolute time scale is not accuratelycalibrated; however, by analogy with theMoon, the initial crustal formation may haveoccurred between 4 billion and 4.5 billionyears ago, and the apparent freshness of thelarge martian volcanoes suggests theirformation within the last billion years.
Many scientific questions exist regardingMars and its history and will continue to existlong after the first human missions to theplanet have been achieved. Two key areas ofscientific interest are the evolution of martianclimate and the possible existence of past life.
Mars’ atmosphere now consists largely ofcarbon dioxide with a typical surface pressureof about 0.01 of Earth’s atmosphere(comparable to Earth’s atmospheric pressureat an altitude of approximately 30,000 metersor 100,000 feet) and surface temperatures thatmay reach 25°C (77°F) at the equator inmidsummer, but are generally much colder.At these pressures and temperatures, watercannot exist in liquid form on the surface.However, Mariner 9 and the subsequentViking missions observed features whichindicate that liquid water has been present onMars in past epochs (Figure 2-4).
Evidence for the past existence ofrunning water and standing water has beennoted, and the interpretation is that theatmosphere of Mars was thicker andwarmer—perhaps much like Earth’s earlyatmosphere before the appearance of oxygen.Three questions arise:
•What was the reason for the change ofatmospheric conditions on Mars?
•What are the implications of suchchanges for environmental changes onEarth?
•Were the conditions on early Marsenough like those of early Earth to guidea search for past life?
These questions are part of the Marsscientific exploration addressed by theReference Mission, and these questions can beanswered only by understanding thegeological attributes of the planet: the types ofrocks present, the absolute and relative agesof the rocks, the distribution of subsurfacewater, the history of volcanic activity, thedistribution of life-forming elements andcompounds, and other geologic features.These attributes all have to be understood inthe context of what we know about the Earth,the Moon, and other bodies of our solarsystem.
Addressing the question of whether lifeever arose on Mars can provide afundamental framework for an explorationstrategy because, in principle, the search forpast life includes investigating the geologicaland atmospheric evolution of the planet. It isgenerally understood that the search forevidence of past life cannot be conductedsimply by a hit-and-miss landing-and-lookingstrategy, but must be undertaken in a step-wise manner in which geological provenancesthat might be suitable are characterized,located, and studied (Exobiology ProgramOffice, 1995). The characteristics of suitableexploration sites are highly correlated withthe search for past or present water on the
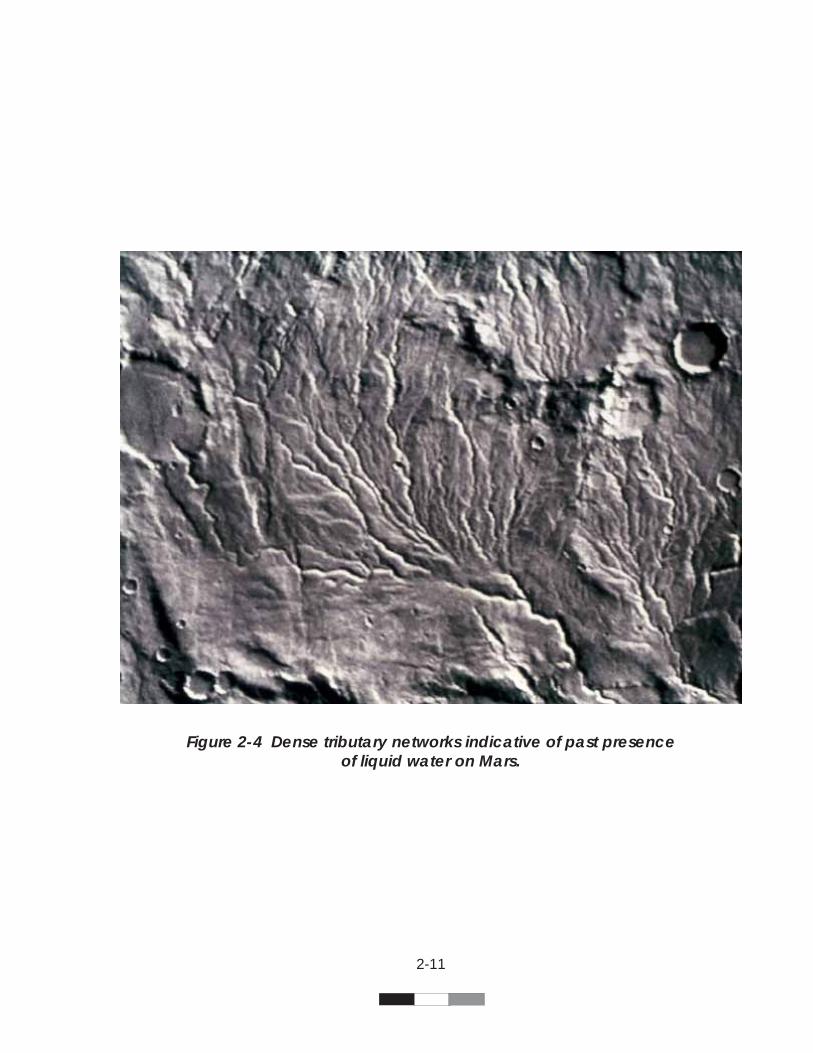
2-11
Figure 2-4 Dense tributary networks indicative of past presenceof liquid water on Mars.

2-12
planet. Within the geological framework,strategic questions related to the search forevidence of life can be posed.
•What is the absolute time scale fordevelopment of the major features onMars? This would include determiningthe time of formation of the martiancrust, a range of formation ages forvolcanic plains, and the age of theyoungest volcanoes. With thisinformation as a guide, the age offormation of water-formed channelsshould be boundable, and theorganogenic element content of martianmaterials as a function of time may beobtainable. As is inferred from the SNCmeteorites which are believed to haveoriginated on Mars (Bogard, et al., 1983and McSween, 1994), impacts on Marshave preserved samples of the martianatmosphere in shock-produced glasses.Thus, it may be possible to characterizethe evolution of the atmosphere fromcarefully selected samples of impactglass.
•What is the evidence for the distributionin space and time of water on thesurface? This would include watercombined in widely distributed igneousor clay minerals, in localized depositssuch as hydrothermal vents, insubsurface permafrost, in the polar caps,and in the atmosphere. The distribution,age, composition, and mode offormation (minerals formed by reactionwith or deposition from heated or cool
aqueous fluids, as found in the SNCmeteorites) is of major interest. Can thechannels apparently formed by watererosion be demonstrated to haveexperienced running water? Is thereverifiable evidence for the existence ofponds of water? What is the distributionof subsurface permafrost, and can thefeatures interpreted as permafrostcollapse be verified?
•What are the distribution andcharacteristics of carbon and nitrogen—the organogenic elements? Where dothey exist in reduced form? In whatenvironments are they preserved in theiroriginal state? Is there chemical, isotopic(hydrogen, carbon, nitrogen isotopes), ormorphological evidence that will linkconcentrations of organogenic elementsto the past existence of life?
•If organic remains can be found, howextensive are they in space and time?What are their characteristics, varietyand complexity? How are they similar ordifferent to biological materials onEarth?
Answers to these questions may besought through orbital mapping (for example,to determine the distribution of hydrothermalmineral deposits), in situ studies (surfacemineralogy, distribution of volatile elements),sample return (age of rock units, detailedchemistry, mineralogy, and isotopiccomposition), and human exploration withsample return (similar but with more highlyintelligent sample collection). The scientific
2-13
community debates the precise order ofinvestigative means used to achieve thisstrategy, but generally concludes that thequestion of distribution of past life will be ofsuch a difficult nature that sample return willbe required and that humans will ultimatelychoose to carry out the exploration in person.
Given the assumption that humans willtake on the bulk of this type of exploration,the key questions become:
•What is the appropriate role and place inthe exploration strategy of roboticsample return missions?
•Scientifically, where is the appropriatetransition from robotic missions,conducted routinely, and humanexploration missions, which may besingular, large, and not reproducible?
General guidelines are needed to answerthese questions. Sample return missionsshould be favored when they can be used tosignificantly reduce the number ofsubsequent missions to address the geologicalmodeling of the planet. Sample returnmissions are likely to be more expensive thanone-way missions, so to be cost effective, theymust reduce the need for a proportionallylarger number of subsequent missions orgarner otherwise unobtainable information iftheir justification is purely scientific. From ascientific perspective, the guidelines forhuman exploration are similar. If a humanexploration mission promises to answer themajor strategic questions better than a largernumber of robotic explorers, or opens new
modes of exploration that cannot be achievedrobotically, then the human mission will becost effective on scientific grounds.
2.4 Exploration Rationale
Aside from purely scientific benefits, thehuman exploration of Mars brings with itmany tangible and intangible near-termbenefits such as:
•New associations between groups ordisciplines which previously have notinteracted, but because of commonobjectives in exploration find newstrengths and opportunities (forexample, new international cooperation).
•New technologies which may be usedfor practical application on Earth or inother space enterprises (dual-usetechnologies).
•Education of a new generation ofengineers and scientists spurred by thedream of Mars exploration.
In the long term, the biggest benefit ofthe human exploration of Mars may well bethe philosophical and practical implicationsof settling another planet.
2.4.1 Inhabiting Another Planet
The dream of human exploration of Marsis intimately tied to the belief that new landscreate new opportunities and prosperity. Inhuman history, migrations of people havebeen stimulated by overcrowding, exhaustionof resources, the search for religious or

2-14
economic freedom, competitive advantage,and other human concerns. Rarely havehumans entered new territory and thencompletely abandoned it. A few people havealways been adventurous enough to adopt anewly found territory as their home. Most ofthe settlements have eventually becomeeconomically self-sufficient and haveenlarged the genetic and economic diversityof humanity. The technological revolution ofthe twentieth century, with high speedcommunication and transportation andintegrated economic activity, may havereversed the trend toward human diversity;however, settlement of the planets can onceagain enlarge the sphere of human action andlife.
Outside the area of fundamental science,the possibility that Mars might someday be ahome for humans is at the core of much of thepopular interest in Mars exploration. Ahuman settlement on Mars, which wouldhave to be self-sufficient to be sustainable,would satisfy human urges to challenge thelimits of human capability, create thepotential for saving human civilization froman ecological disaster on Earth (for example, agiant asteroid impact or a nuclear incident),and potentially lead to a new range of humanendeavors that are not attainable on Earth.
The settlement of Mars presents newproblems and challenges. The absence of anatural environment that humans and mostterrestrial fauna and flora would find livableand the current high cost of transportation arethe main barriers to human expansion there.
The fact that, once on Mars, humans cannoteasily return to the Earth (and then only atspecified times approximately 26 monthsapart) makes it necessary to develop systemswith high reliability and robustness.
At the present level of humantechnological capability, a self-sufficientsettlement on Mars stretches our technicallimits and is not economically justifiable, butit is imaginable. If, however, transportationcosts were to be reduced by two orders ofmagnitude, such settlements might becomeeconomically feasible. What kind of strategyshould be followed to explore the concept ofhumans permanently inhabiting Mars? Threeconsiderations are important.
•Demonstrating the potential for self-sufficiency. This would includeunderstanding the potential to obtain allimportant materials to support humanhabitation from the natural materials ofMars. It is most important that humansbe able to capture energy for drivingprocesses and have access to naturalresources (such as water, oxygen,agricultural raw materials, buildingmaterials, and industrial materials) frommartian rocks and soil. Demonstratingself-sufficiency requires that resources belocated and technology and experiencebe developed to efficiently extract themfrom the in situ materials. Much can bedone robotically to locate resources priorto arrival of the first human crew.Extraction technology depends on amore detailed understanding of the
2-15
specific materials present on Mars andrequires the detailed mineralogical andchemical analyses generally associatedwith sample return missions. Anexception is the production of water,methane, and oxygen from the martianatmosphere, which is now known wellenough to design extraction technology(Sullivan, et al., 1995). In addition to theextraction and use of martian resources,self-sufficiency undoubtedly requireshighly advanced life support systems inwhich most of the waste product fromhuman activity is recovered and reused,and food is grown on the planet.
•Demonstrating that human beings cansurvive and flourish on Mars. This willlikely be first explored by long-durationmissions in Earth orbit and may becontinued in the 1/6-g environment ofthe Moon (Synthesis Group, 1991). Twotypes of needs—physical andpsychological—must be met for humansto survive and flourish on Mars. Physicalneeds will be met through advanced lifesupport systems, preventive medicalsciences (nutrition, exercise,environmental control, etc.), and thecapability of medical support for peopleon Mars. Psychological needs will bemet through the design of systems,identification and selection of work forcrews, communications with Earth, anda better understanding of humaninteractions in small communities. Manyof these can be addressed through alunar outpost program or in the
International Space Station program tobe conducted in the late 1990s. Some ofthese concerns can also be addressed onthe first human exploration missions toMars, in which greater risks may betaken than are appropriate for latersettlement.
•Demonstrating that the risks to survivalfaced in the daily life of settlers on Marsare compatible with the benefitsperceived by the settlers. Risks tosurvival can be quantified through theMars exploration program. However, thebenefits will be those perceived byfuture generations and cannot beaddressed here.
2.4.2 International Cooperation
The space age gained its start in a periodof intense technical and social competitionbetween East and West, represented by theSoviet Union and the United States.Competition during the InternationalGeophysical Year resulted in the Soviet Unionbeing the first to launch a satellite into Earthorbit, which served to challenge and remindthe United States that technologicalsupremacy was not solely the province of theUnited States.
The start of the Apollo program was apolitical decision based more on theperception of the political and technologicalrewards to be gained by attacking a trulydifficult objective in a constrained timeperiod. The space race began, the UnitedStates won it, and a relatively few years later,

2-16
the Soviet Union collapsed. Fortunately, theRussians did not view Apollo success as areason to terminate their space explorationprogram, and they continued to developcapabilities that are in many areas on a parwith United States capabilities. Also, duringthe post-Apollo time frame, space capabilitygrew in Europe (with the formation of theEuropean Space Agency), Japan, Canada,China, and other countries. With thesedevelopments, the basis has been laid for atruly international approach to Marsexploration—an objective in which allhumanity can share.
The exploration of Mars will derivesignificant nontechnical benefits fromstructuring this undertaking as aninternational enterprise. It is unnecessary forany country to undertake human explorationof Mars alone, particularly when others, whomay not now have the required magnitude ofcapability or financial resources, do have thetechnological know-how. An underlyingrequirement for the Reference Mission is thatit be implemented by a multinational groupof nations and explorers. This would allowfor a continuation of the cooperative effortthat is being made to develop, launch, andoperate the International Space Station.
2.4.3 Technological Advancement
From the outset, the Reference Missionwas not envisioned to be a technologydevelopment program. The Mars Study Teammade a deliberate effort to use eithertechnology concepts that are in use today orbasic concepts that are well understood.
Section 3 of this report will illustrate thatmuch of the technology needed for a Marsmission is either currently available or withinthe experience base of the spacefaring nationsof the Earth. No fundamental breakthroughsare required to accomplish the mission.However, an extended period of advanceddevelopment will be required to prepare thesystems needed to travel to and from Mars orto operate on the surface of Mars; specifically,high efficiency propulsion systems, lifesupport systems, and an advanced degree ofautomation to operate, and if necessaryrepair, processing equipment. At a generallevel, perhaps two of the most importantways in which the Reference Mission willhelp advance technology that will benefitmore than just this program is to provide theprogrammatic “pull” to bring technologies toa usable state and the “drive” to makesystems smaller, lighter, and more efficient fora reasonable cost.
For any of the technology areasmentioned above (as well as others notmentioned), this program will requiresystems using these technologies to meetperformance specifications and be deliveredon schedule, all at a pace perhaps nototherwise required. This applies to anydevelopment effort. But for the ReferenceMission, many technologies will need to beready at once, causing many of these systemsto advance in maturity much faster thanmight have otherwise been possible. Thesemature systems and related technologies willthen be available to the marketplace to be

2-17
used in applications limited only by theimagination of entrepreneurs.
The matured systems and thetechnologies behind them will be attractiveto entrepreneurs in part because of the effortto make them smaller, lighter, and moreefficient. A kilogram of mass saved in any ofthese systems saves many tens of kilogramsof mass at launch from Earth (depending onthe propulsion system used) simply becauseless propellant is required to move thesystems from Earth to Mars. Smaller, lighter,or more efficient each translate into acompetitive advantage in the marketplacefor those who use these technologies.
Among the specific areas of desirabletechnology advancement is propulsionsystems. Even the earliest studies for sendingpeople to the Moon or Mars recognized thatpropulsion system efficiency improvementshave tremendous leverage in reducing thesize of the complete transportation systemneeded to move people and supplies.Chemical propulsion systems are reachingthe theoretical limits of efficiency in therocket engines now being produced. Furtherimprovements in efficiency will require theuse of nuclear or electrical propulsionconcepts which have the potential ofimproving propulsion efficiencies by a factorof up to 10, with corresponding reductions inthe amount of propellant needed to movepayload from one place to another. Both ofthese propulsion technologies have maturedto a relatively high state of readiness in thepast, but neither has reached the level
necessary to be used on the ReferenceMission. Once developed, these technologiesbecome available for use, perhaps on reusablevehicles, for the ever-increasing traffic in LEOup to geosynchronous altitude.
Another area of tremendous leverage fora mission to other planets is the ability to useresources already there rather than burdeningthe transportation system by bringing themfrom Earth. Focusing on understanding whatis required for eventual settlement on Marsleads quickly to those technologies that allowthe crew to live off the land. Of the knownraw materials available on Mars, theatmosphere can be found everywhere and canbe used as feedstock to produce propellantsand life support resources. Other rawmaterials (such as water) will eventually befound and used, but sufficient detail is notcurrently known about their locations andquantities. This is an objective for initialexploration.
Much of the processing technologyneeded to produce propellants fromatmospheric gases already exists and is in useon Earth. However, integrating thesetechnologies into a production plant that canoperate unattended for a period of years,including self-repair, is an area whereadditional development effort will berequired. (Chemical processing plants onEarth are making significant progress towardautonomous operation even now.) In thisarea, the Reference Mission will adapt theexisting technologies at the time of theReference Mission rather than pull those

2-18
technologies up to the levels needed by theprogram. Regardless of how this technologyis developed, the advantages inmanufacturing and materials processing willbe significant.
Life support systems is another specificarea where advancing the state of the art cansignificantly reduce the overall size of thesystems launched from Earth. The sametechnologies that produce propellants canalso produce water and breathable gases forhuman crews. These resources can be used asmakeup for losses in a closed or partiallyclosed life support system, and can also serveas an emergency cache should primary lifesupport weaken or fail. Life support for thisReference Mission can take advantage ofdevelopments already made for InternationalSpace Station and submarine use.Developments in support of the ReferenceMission are likely to return technologies thatare smaller, more efficient, and perhaps lesscostly than those available at the time.
Important in all of these areas is a focuson ensuring that the cost to manufacture andoperate these systems is affordable in thecurrent economic environment. The design-to-cost concept is not currently wellunderstood in the aerospace industry, andany advancements in this area will benefitdevelopment programs well beyond thoseconnected with the Reference Mission.Developing the tools needed to determinecosts that are as easy to use as the tools usedto predict system performance is one of thekey technology areas that will help make the
Reference Mission possible. Equal with this isinstilling an attitude of cost consciousness inthe engineering community that will designand produce these systems. The importanceof cost as a design consideration andproviding the tools to accurately forecast costshould be incorporated in the educationalsystem that trains these engineers.
2.4.4 Inspiration
It can be argued that one role ofgovernment is to serve as a focusing agent forthose events in history that motivate andunify groups of people to achieve a commonpurpose. Reacting to conflicts quickly comesto mind as an example. For the United States,World War II and the Persian Gulf War areexamples of how a nation was unified in apositive sense; the Viet Nam War is anexample of how the opposite occurred.
It can also be argued that a role ofgovernment is to undertake technical andengineering projects that can inspire andchallenge. The great dam building projects inthe American West during the 1930s is anexample of the government marshaling theresources to harness vast river systems forelectrical power and irrigation to allow forpopulation growth. The Interstate HighwaySystem is another example that receives littlefanfare but has changed the way we live. Thegovernment incentives to private entities thatled to the development of the vastintercontinental rail system in the last centuryis another example.
2-19
Few government efforts can collectivelymotivate, unify, challenge, and inspire. TheApollo program was one such example thatfocused a national need to compete withanother nation in a very visible and highprofile manner; the Reference Mission canserve as another. In this instance, theundertaking provides a focus for the humanneed to struggle and compete to achieve aworthy goal—not by competing against eachother but rather against the challengespresented by a common goal.
2.4.5 Investment
Scientific investigation, humanexpansion, technology advancement, andinspiration are not attainable free of charge.Resources must be devoted to such a projectfor it to succeed; and at a certain level, thiscan be viewed as denying those resources toother worthy goals. The Reference Missioncosts are high by current space programstandards, and additional effort is needed toreduce these costs. The total program andannual costs of the Reference Mission rangefrom 1 percent to 2 percent of the currentFederal budget—still far below other Federalprograms. If this program expands to aninternational undertaking, the costs incurredby each partner would be reduced even more.
A debate must still occur to determine ifthis project is a worthwhile investment of thepublic’s resources. But the use of theseresources should be viewed as more than justan effort to send a few people to Mars. Thisproject will be investing in a growing part of
the infrastructure that affects our everydaylife: the use of space for business, commerce,and entertainment. Just as space projects donow, the Reference Mission can serve as afocal point for invigorating the scientific,technical, and social elements of theeducation system, but with a much longerrange vision.
2.5 Why Not Mars?
Several impediments may severelyhamper the implementation of a program forthe human exploration of Mars. Someimpediments are due simply to the fact thatthey have not been evaluated in sufficientdetail to gauge their impact. Others aresimply beyond the control of this or any otherprogram and must be taken into account asthe program advances. The followingparagraphs discuss some of theseimpediments as viewed by the Mars StudyTeam and others considering programs of thistype (Mendell, 1991).
2.5.1 Human Performance
It is a known fact that the human bodyundergoes certain changes when exposed toextended periods of weightlessness—changesthat are most debilitating when the spacetraveler must readapt to gravity. The mostserious known changes includecardiovascular deconditioning, decreasedmuscle tone, loss of calcium from bone mass,and suppression of the immune system. Avariety of countermeasures for theseconditions have been suggested, but none

2-20
have been validated through testing for long-term, zero-g spaceflight. The Russians havehad some success with long periods of dailyexercise to maintain cardiovascular capacityand muscle tone, but monotonous and time-consuming exercise regimes affect theefficiency and morale of the crew.
Artificial gravity is often put forward as apossible solution. In this case, the entirespacecraft, or at least that portion containingthe living quarters for the crew, would berotated so that the crew experiences aconstant downward acceleration thatsimulates gravity. It is generally assumed thatthe Coriolis effect (the dizziness caused byspinning around in circles) will fall below thethreshold of human perception if thespacecraft is rotated at a slow rate. It is notknown whether simulation of full terrestrialgravity is required to counteract all of theknown deconditioning effects ofweightlessness, or whether the small residualCoriolis effect will cause some disorientationin crew members. No data from a space-basedfacility exists, and the space life scienceresearch community is split over the viabilityof artificial gravity as a solution.
Deconditioning is a critical issue for Marsmissions because the crew will undergo hightransient accelerations during descent to themartian surface. Depending on thephysiological condition of the crew, theseaccelerations could be life threatening. Onceon the surface of Mars, the crew must recoverwithout external medical support and mustperform a series of demanding tasks. The
time required for recovery is particularlyimportant if the surface stay is short (as hasbeen proposed for “opposition-class”missions).
No one knows whether exposure to agravity field lower than the Earth’s willreverse the deconditioning induced byweightless space travel. And if some level ofgravity does halt the deconditioning effects,what level is too low? In other words, if acrew arrives on Mars in good physicalcondition, what will their condition be afterspending an extended period of time undermartian gravity? Artificial gravity cannot beprovided easily on the martian surface, andApollo missions to the Moon were too shortto produce observable differences betweenthe condition of the astronauts who went tothe surface and those who remainedweightless in orbit.
The human body’s reaction to Marssurface conditions, other than gravity, is alsonot yet known. The Viking missions to Marsfound a highly reactive agent in the martiansoil, an explanation for which has not yetbeen agreed to by the scientific community.Without understanding this agent’s chemicalbehavior, its impact on human crews cannotbe determined. No matter how carefully theMars surface systems are designed and nomatter how carefully the crews handle nativematerials, small amounts of the martianatmosphere and soil will be introduced intocrew living compartments during the courseof the mission. It will be necessary to bettercharacterize the Mars environment and assess

2-21
its impact on the crew. Assuring the healthand safety of the crew will be of obviousimportance.
Psychiatrists and psychologists agree thatpiloted missions to Mars may well give rise tobehavioral aberrations among the crew ashave been seen on Earth in conditions ofstress and isolation over long periods of time.The probability of occurrence and the level ofany such anomalous behavior will dependnot only on the crew members individuallybut also on the group dynamics among thecrew and between the crew and missionsupport personnel on Earth. In general, theprobability of behavior extreme enough tothreaten the mission will decrease with anincreased crew size. However, the expense ofsending large payloads to Mars to support alarge crew will limit the number of people inany one crew. At the present time, little efforthas been spent developing techniques forcrew selection that will adequately guaranteepsychological stability on a voyage to Marsand back. Russian experience suggests that acrew should train together for many yearsprior to an extended flight.
2.5.2 System Reliability and Lifetime
The spacecraft and surface elements willlikely be the most complex systemsconstructed up to that point in time, and thelives of the crew will depend on the reliabilityof those systems for at least 3 years. Bycomparison, a Mars mission will be of aduration at least two orders of magnitudegreater than a Shuttle mission, and there will
be no opportunity for resupply. Either thesystems must work without failure or thecrew must have adequate time and capabilityto repair those elements which fail.
Particularly important to the success ofpiloted Mars missions will be testing ofintegrated flight systems under conditionssimilar to the actual mission for periods oftime similar to, and preferably much greaterthan, the actual mission. Integrated flighttesting is truly critical if the flight system isthe first of its kind. Unfortunately, if history isa guide, budget pressures will cause programmanagement to search for substitutions forfull-up flight testing. (For full-up flighttesting, hardware identical to that used inflight is operated for periods of time equal toor greater than the actual mission whichallows weaknesses or failures to be identifiedand corrected. This is the most expensive wayto test, in terms of time and money.) After all,most of the expense of a mission to Mars is inlaunch and operations, two categories ofexpense for a flight test whose magnitudewould be similar to that of an actual mission.And what possible motivation would there befor a crew to spend 2 or 3 years in orbitpretending to go to Mars?
Somewhere in a large, complex program,a manager will take a shortcut under pressurefrom budget or schedule reasons, and theconsequences will not always be obvious toprogram management. As a result, thereliability of the product will beoverestimated. And management alwaysexpresses a very human tendency to believe

2-22
good news. (This can be illustrated by thechange in the official estimates of thereliability of the Shuttle before and after theChallenger tragedy.) In short, significant riskis introduced when relying on a product thathas not been tested in its workingenvironment, whether it is a new car, acomplex piece of software, or a spacecraft.
2.5.3 Political Viability and SocialConcerns
The human exploration of Mars is likelyto be undertaken for many of the reasonsalready cited as well as others not presentedhere. To a large degree, the responsibility fortaking action based on these reasons is in therealm of political decision makers as opposedto commercial concerns or other spheres ofinfluence. Thus, support for this type ofprogram must be sustained in the politicalenvironment for a decade or more in the faceof competition for the resources needed tocarry it out.
Perhaps the closest analogy to a possibleinternational Mars exploration program is theInternational Space Station, which has beenan approved international flight program forover 10 years. During those 10 years, theconfiguration of the Station has changedseveral times and the number of and level ofcommitment from partners has changedsignificantly. Also during this time, Russia,initially a significant competitor, has turnedinto one of the larger partners in theendeavor. And all of this has taken place priorto launching the first element of the Station.
Shortening development time can bebeneficial if the project remains focused on itsrequirements and can avoid changes imposedby external forces.
If an institution wishes to be supportedwith public funds for a long-duration project,then the institution must be sophisticatedenough to plan visible milestones, which arecomprehensible to the public, at intervalsappropriate to the funding review process.Historically, NASA has been reasonablysuccessful at maintaining funding of decade-long programs in the face of an annual budgetreview. The vast majority of the programs areunderstood by all to have a finite duration.After a satellite has been launched andoperated for a given period of time, it eitherfails or is shut off. Neither NASA nor the U.S.Congress are yet comfortable with open-ended programs such as the Shuttle orInternational Space Station or humansettlement of the solar system.
The decades-long time frame for humanexploration of Mars cannot be supported untilthe role of the space program is wellintegrated into the national space agenda andthe exploration of space is no longerconsidered a subsidy of the aerospaceindustry. To accomplish this, the spaceprogram must show concern for national andinternational needs (visible contributions totechnology, science, environmental studies,education, inspiration of youth, etc.) whilemaintaining a thoughtful and challengingagenda of human exploration of space inwhich the public can feel a partnership.
2-23
Finally there is the political concern ofback-contamination of Earth. This is as mucha social issue as a technical one. Somesegments of the population will object to anyMars mission on these grounds. The twotenets of a successful defense against suchopposition are to ensure that prudent stepsare taken at all phases of the project tominimize risks and to demonstrate that thevalue of the mission is high enough to meritthe residual minuscule risk.
2.6 Summary
This section has woven together severalkey elements of a rationale for undertakingthe Reference Mission: human evolution,comparative planetology, internationalcooperation, technology advancement,inspiration, and investment. Severalchallenging aspects must be resolved beforethe first human crews can be sent to Mars. Butthe Reference Mission has a longer rangeview and purpose that makes thesechallenges worth the effort to overcome. If, atsome future time, a self-sufficient settlementis established on Mars, with the capability ofinternal growth without massive importsfrom Earth, the benefit will be to the eventualdescendants of the first settlers, who will havetotally different lives and perspectivesbecause of the initial investment made bytheir ancestors.
2.7 References
Bogard, D. and P. Johnson, “MartianGases in an Antarctic Meteorite,” Science,Vol. 221, pp. 651-654, 1983.
Duke, M. and N. Budden, “Results,Proceedings and Analysis of the MarsExploration Workshop,” JSC-26001,NASA, Johnson Space Center, Houston,Texas, August 1992.
Exobiology Program Office, “AnExobiological Strategy for MarsExploration,” NASA SP-530, NASAHeadquarters, Washington, DC, April1995.
McSween, H., “What We Have LearnedAbout Mars From SNC Meteorites,”Meteoritics, Vol. 29, pp. 757-779, 1994.
Mendell, W., “Lunar Base as a Precursorto Mars Exploration and Settlement,” 42ndCongress of the International AstronauticalFederation, IAF-91-704, Montreal, Canada,October 5-11, 1991.
Sullivan, T., D. Linne, L. Bryant, and K.Kennedy, “In Situ-Produced Methane andMethane/Carbon Monoxide Mixtures forReturn Propulsion from Mars,” Journal ofPropulsion and Power, Vol. 11, No. 5, pp.1056-1062, 1995.
Synthesis Group, “America at theThreshold: Report of the Synthesis Groupon America’s Space ExplorationInitiative,” U.S. Government PrintingOffice, Washington, DC, May, 1991.

3-1
3. Mission and SystemOverview

3-2

3-3
3.1 Introduction
Previous studies of human exploration ofMars have tended to focus on spacecraft andflight, rather than on what the crew would doon the surface. The Reference Mission takesthe point of view that surface exploration isthe key to the mission, both for science andfor evaluation of the potential for settlement.As a consequence, the Reference Missionarchitecture allows for a robust surfacecapability with significant performancemargins: crews will explore in the vicinity ofthe outpost out to a few hundred kilometers,will be able to study materials in situ and in asurface laboratory, and will iterate theirfindings with their exploration plan. Inaddition, the development and demonstrationof the key technologies required to testsettlement issues will provide a substantialworkload. To make surface explorationeffective, the supporting systems (such asEMU, life support, vehicles, robotics) must behighly reliable, highly autonomous, andhighly responsive to the needs of the crew.Some needs may not be anticipated duringcrew preparation and training, which willsignificantly challenge the management andoperations systems.
An infinite number of designs arepossible for a mission of this type. Theapproach taken here is based on two generalprinciples.
•A hierarchy of requirements (startingfrom mission objectives) is followed,which, as they gain greater depth anddefinition, merge with the proposedimplementation through a set of systemspecifications (note that the ReferenceMission has followed these requirementsdown to the system level only).
•A reasonable number of alternatives willbe considered, through trade studies ateach level of definition allowingcomparisons and choices.
3.1.1 Mission Objectives
Section 1 of this report discussed a seriesof workshops conducted by NASA to define aset of objectives and supporting rationale fora Mars exploration program. The workshopattendees (see Table 2-1) identified andrecommended for adoption three objectivesfor analysis of a Mars exploration programand the first piloted missions in that program.

3-4
They are to conduct:
•Human missions to Mars and verify thatpeople can ultimately inhabit Mars.
•Applied scientific research for usingmartian resources to augment life-sustaining systems.
•Basic scientific research to gain newknowledge about the solar system’sorigin and history.
A Mars Study Team composed of NASApersonnel representing most NASA fieldcenters (see Table 2-2) used inputs from theadopted objectives to construct the ReferenceMission. In addition, the Study Teamrecognized that past mission studies hadcharacterized piloted Mars missions asinherently difficult and exorbitantlyexpensive. Therefore, the Mars Study Teamadded three objectives. These were to:
•Challenge the notion that humanexploration of Mars is a 30-year programthat will cost hundreds of billions ofdollars.
•Challenge the traditional technicalobstacles associated with sendinghumans to Mars.
•Identify relevant technologydevelopment and investmentopportunities.
3.1.2 Surface Mission ImplementationRequirements
To satisfy the objectives for the ReferenceMission, the Mars Study Team developed aseries of capabilities and demonstrations thatshould be accomplished during surfacemission activities. Table 3.1 defines theactivities and capabilities that must exist tomeet the first three program objectives to thenext level of detail. The three objectives addedby the Study Team are useful in selectingamong feasible mission implementationoptions that could be put forth to satisfy thecapabilities and demonstrations listed in thetable.
3.1.2.1 Conduct Human Missions to Mars
From the point of view of the surfacemission, conducting human missions impliesthat the capability for humans to live andwork effectively on the surface of Mars mustbe demonstrated. This includes several sub-objectives to:
•Define a set of tasks of value for humansto perform on Mars and provide thetools to carry out the tasks.
•Support the humans with highly reliablesystems.
•Provide a risk environment that willmaximize the probability ofaccomplishing mission objectives.
•Provide both the capability and therationale to continue the surfaceexploration beyond the first mission.
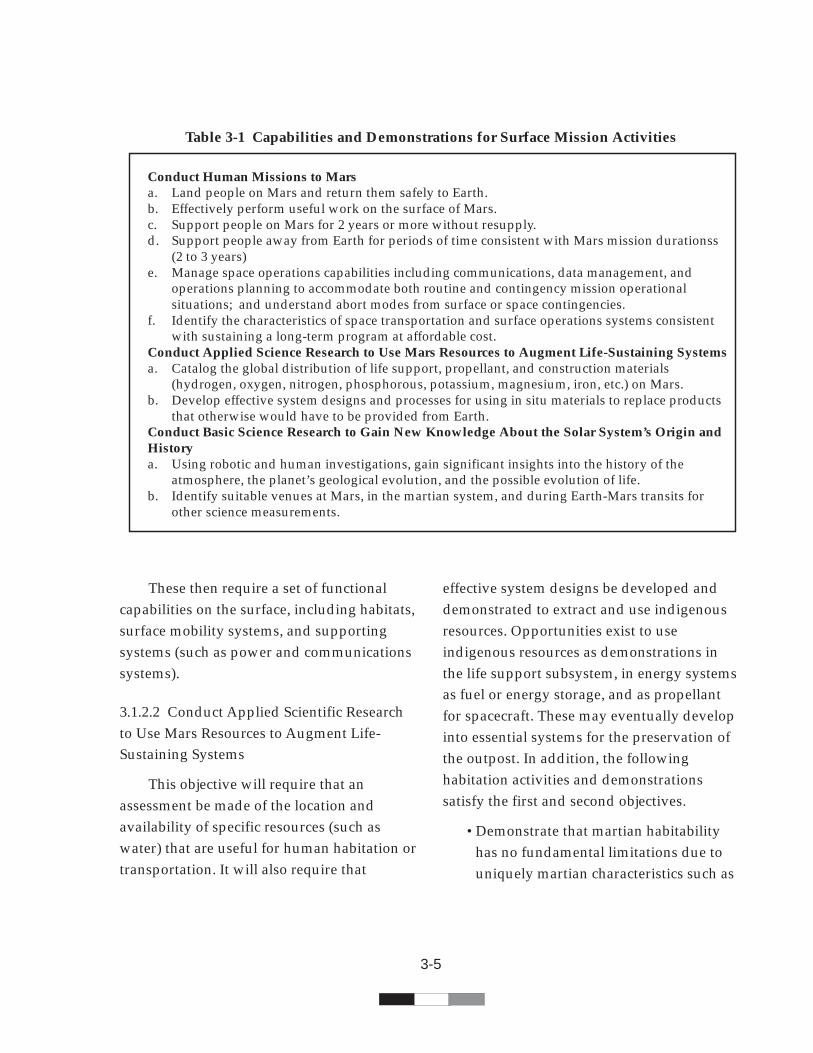
3-5
These then require a set of functionalcapabilities on the surface, including habitats,surface mobility systems, and supportingsystems (such as power and communicationssystems).
3.1.2.2 Conduct Applied Scientific Researchto Use Mars Resources to Augment Life-Sustaining Systems
This objective will require that anassessment be made of the location andavailability of specific resources (such aswater) that are useful for human habitation ortransportation. It will also require that
effective system designs be developed anddemonstrated to extract and use indigenousresources. Opportunities exist to useindigenous resources as demonstrations inthe life support subsystem, in energy systemsas fuel or energy storage, and as propellantfor spacecraft. These may eventually developinto essential systems for the preservation ofthe outpost. In addition, the followinghabitation activities and demonstrationssatisfy the first and second objectives.
•Demonstrate that martian habitabilityhas no fundamental limitations due touniquely martian characteristics such as
Table 3-1 Capabilities and Demonstrations for Surface Mission Activities
Conduct Human Missions to Marsa. Land people on Mars and return them safely to Earth.b. Effectively perform useful work on the surface of Mars.c. Support people on Mars for 2 years or more without resupply.d. Support people away from Earth for periods of time consistent with Mars mission durationss
(2 to 3 years)e. Manage space operations capabilities including communications, data management, and
operations planning to accommodate both routine and contingency mission operationalsituations; and understand abort modes from surface or space contingencies.
f. Identify the characteristics of space transportation and surface operations systems consistentwith sustaining a long-term program at affordable cost.
Conduct Applied Science Research to Use Mars Resources to Augment Life-Sustaining Systemsa. Catalog the global distribution of life support, propellant, and construction materials
(hydrogen, oxygen, nitrogen, phosphorous, potassium, magnesium, iron, etc.) on Mars.b. Develop effective system designs and processes for using in situ materials to replace products
that otherwise would have to be provided from Earth.Conduct Basic Science Research to Gain New Knowledge About the Solar System’s Origin andHistorya. Using robotic and human investigations, gain significant insights into the history of the
atmosphere, the planet’s geological evolution, and the possible evolution of life.b. Identify suitable venues at Mars, in the martian system, and during Earth-Mars transits for
other science measurements.
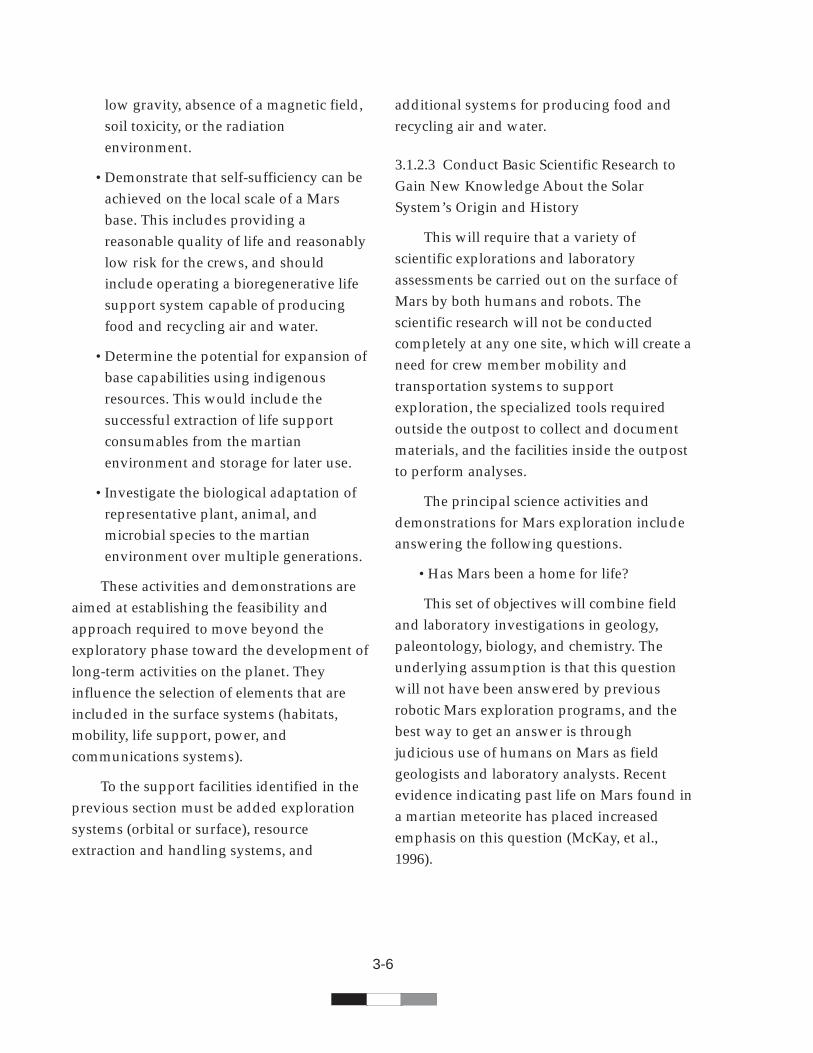
3-6
low gravity, absence of a magnetic field,soil toxicity, or the radiationenvironment.
•Demonstrate that self-sufficiency can beachieved on the local scale of a Marsbase. This includes providing areasonable quality of life and reasonablylow risk for the crews, and shouldinclude operating a bioregenerative lifesupport system capable of producingfood and recycling air and water.
•Determine the potential for expansion ofbase capabilities using indigenousresources. This would include thesuccessful extraction of life supportconsumables from the martianenvironment and storage for later use.
•Investigate the biological adaptation ofrepresentative plant, animal, andmicrobial species to the martianenvironment over multiple generations.
These activities and demonstrations areaimed at establishing the feasibility andapproach required to move beyond theexploratory phase toward the development oflong-term activities on the planet. Theyinfluence the selection of elements that areincluded in the surface systems (habitats,mobility, life support, power, andcommunications systems).
To the support facilities identified in theprevious section must be added explorationsystems (orbital or surface), resourceextraction and handling systems, and
additional systems for producing food andrecycling air and water.
3.1.2.3 Conduct Basic Scientific Research toGain New Knowledge About the SolarSystem’s Origin and History
This will require that a variety ofscientific explorations and laboratoryassessments be carried out on the surface ofMars by both humans and robots. Thescientific research will not be conductedcompletely at any one site, which will create aneed for crew member mobility andtransportation systems to supportexploration, the specialized tools requiredoutside the outpost to collect and documentmaterials, and the facilities inside the outpostto perform analyses.
The principal science activities anddemonstrations for Mars exploration includeanswering the following questions.
•Has Mars been a home for life?
This set of objectives will combine fieldand laboratory investigations in geology,paleontology, biology, and chemistry. Theunderlying assumption is that this questionwill not have been answered by previousrobotic Mars exploration programs, and thebest way to get an answer is throughjudicious use of humans on Mars as fieldgeologists and laboratory analysts. Recentevidence indicating past life on Mars found ina martian meteorite has placed increasedemphasis on this question (McKay, et al.,1996).
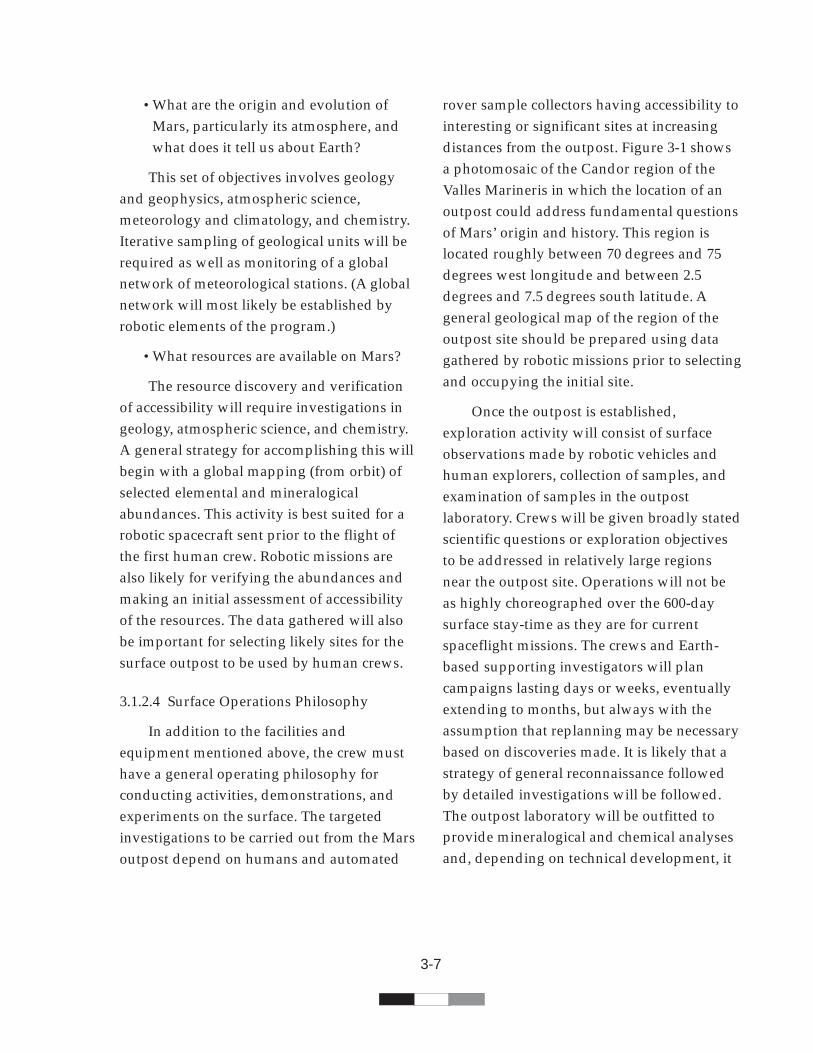
3-7
•What are the origin and evolution ofMars, particularly its atmosphere, andwhat does it tell us about Earth?
This set of objectives involves geologyand geophysics, atmospheric science,meteorology and climatology, and chemistry.Iterative sampling of geological units will berequired as well as monitoring of a globalnetwork of meteorological stations. (A globalnetwork will most likely be established byrobotic elements of the program.)
•What resources are available on Mars?
The resource discovery and verificationof accessibility will require investigations ingeology, atmospheric science, and chemistry.A general strategy for accomplishing this willbegin with a global mapping (from orbit) ofselected elemental and mineralogicalabundances. This activity is best suited for arobotic spacecraft sent prior to the flight ofthe first human crew. Robotic missions arealso likely for verifying the abundances andmaking an initial assessment of accessibilityof the resources. The data gathered will alsobe important for selecting likely sites for thesurface outpost to be used by human crews.
3.1.2.4 Surface Operations Philosophy
In addition to the facilities andequipment mentioned above, the crew musthave a general operating philosophy forconducting activities, demonstrations, andexperiments on the surface. The targetedinvestigations to be carried out from the Marsoutpost depend on humans and automated
rover sample collectors having accessibility tointeresting or significant sites at increasingdistances from the outpost. Figure 3-1 showsa photomosaic of the Candor region of theValles Marineris in which the location of anoutpost could address fundamental questionsof Mars’ origin and history. This region islocated roughly between 70 degrees and 75degrees west longitude and between 2.5degrees and 7.5 degrees south latitude. Ageneral geological map of the region of theoutpost site should be prepared using datagathered by robotic missions prior to selectingand occupying the initial site.
Once the outpost is established,exploration activity will consist of surfaceobservations made by robotic vehicles andhuman explorers, collection of samples, andexamination of samples in the outpostlaboratory. Crews will be given broadly statedscientific questions or exploration objectivesto be addressed in relatively large regionsnear the outpost site. Operations will not beas highly choreographed over the 600-daysurface stay-time as they are for currentspaceflight missions. The crews and Earth-based supporting investigators will plancampaigns lasting days or weeks, eventuallyextending to months, but always with theassumption that replanning may be necessarybased on discoveries made. It is likely that astrategy of general reconnaissance followedby detailed investigations will be followed.The outpost laboratory will be outfitted toprovide mineralogical and chemical analysesand, depending on technical development, it
3-8
Figure 3-1 A regional map illustrating potential locations for a Mars outpost.
DesiredLandingArea

3-9
may be possible to perform simple kinds ofgeochronologic analysis. The purpose of thesestudies will be to support the fieldinvestigations, answer “sharper” questions,and allow human explorers to narrow theirfocus to the sites of optimum samplecollection. Ultimately, selected samples willbe returned to Earth for more detailedanalysis.
Science equipment, experiments, andtools must be proven in order for theexploration and science objectives of themissions to be accomplished, and theirselection is at the core of the argument thathumans can effectively perform scientificresearch on the planet. Failure to equiphumans properly will be a failure to takeadvantage of their unique potential. Over-equipping them may be counterproductive aswell, at least from the cost aspect oftransporting unneeded equipment to Mars.The exploration and science objectives to beperformed on the surface can be broken intofour categories: field work, teleroboticexploration, laboratory and intravehicularactivity experiments, and preparation ofmaterials for return to Earth.
•Observations related to exobiology,geology, and martian atmosphere studieswill be made by humans in the field.Samples and data will be collected andreturned to the outpost laboratory foranalysis. The information from theanalyses will be used to plan or replanfuture traverses as scientific andexploration questions are sharpened.
Information will be transmitted toscientists on Earth so they canparticipate in the replanning activity.Crews will also emplace geophysical andmeteorological instruments to measureinternal properties and atmosphericdynamics. Drilling short depths into thesurface should be standard capability. Atsome point it will be appropriate to drilldeeply into the surface to addressstratigraphic issues and to locate and tapinto water reservoirs.
•The Mars crews will also have thecapability to operate telerobotic systemsconducting even broader exploratorytasks using the ability to communicatewith and direct these systems in nearreal-time. Some teleoperated rovers(TROVs) may be emplaced before crewsarrive on Mars and may collect samplesfor assembly at the Mars outpost. TheTROVs may be designed to provideglobal access and may be able to returnsamples to the outpost from hundreds ofkilometers distance from the site. Theserobotic systems may also emplacegeophysical monitoring equipment suchas seismometers and meteorologicalstations.
•Scientific experiments will also beconducted that are uniquely suited tobeing performed on the surface of Mars.These will typically be experiments thatmake use of the natural martianenvironment (including reduced gravity)or involve interaction with martian

3-10
surface materials. Studies will beperformed on biological systems, bestperformed in conjunction with anexperimental bioregenerative lifesupport system. The deployment of abioregenerative life support capabilitywill be an early activity after crewlanding. Although this system is notrequired to maintain the health andvitality of the crew, it will improve therobustness of the life support system andis important to the early objectives of theoutpost. Field samples will be studied inlaboratory facilities shared between thegeosciences, biosciences, and facilitiessupport systems. For example, analyticalsystems used to monitor organisms inthe biological life support system mayalso be used to monitor the environmentof the habitat in general. Some analyticalcapabilities (such as gaschromatographs) find use in bothgeological and biological analysis. Allsamples and data (geological, biological,medical, etc.) will be documented andcataloged for later research.
•One crew task will be to select andpackage samples for return to Earth formore detailed study. This will require thecreation of a minicuratorial facility andprocedures to ensure thatuncontaminated samples are returned toEarth.
As experience grows, the range of humanexploration will grow from the local to theregional. Regional expeditions, lasting several
weeks and using mobile facilities, may beconducted at intervals of a few months.Between these explorations, analysis in thelaboratory will continue. The crew will alsospend a significant portion of timemaintaining and ensuring the continuingfunctionality of life support and materialsprocessing systems and performingmaintenance on robotic vehicles and EVAsuits (systems should be designed to helpkeep these activities to a minimum).
Crew activities related to living onanother planet should be viewed not only asexperiments but also as activities necessary tocarry out the mission. With minormodifications in hardware and software,ordinary experiences can be used to provideobjective databases for understanding therequirements for human settlement.
To optimize the performance of themission, it will be necessary to pick a landingsite primarily on the basis of satisfyingmission objectives. However, the landing sitemust be consistent with landing and surfaceoperational safety. Detailed maps of candidatelanding sites should be available to define thesafety and operational hazards of the site, aswell as to confirm access (by humans orrobotic vehicles) to scientifically interestinglocations. Depending on the results of priormissions, it would be desirable to site theoutpost where water can be readily extractedfrom minerals or from subsurface deposits.

3-11
3.1.3 Ground Rules and Assumptions
Translating these goals and objectivesinto specific missions and systems requiredadopting a number of guidelines andassumptions.
•Balance technical, programmatic,mission, and safety risks. Marsexploration will not be without risks.However, the risk mitigation philosophyas well as the acceptability of the missionconcept to the public, its elected leaders,and the crews will be critically importantin the technical and fiscal feasibility ofthese missions. Mars is not “3 daysaway,” and overcoming the temptationto look back to Earth to resolve eachcontingency situation may be the mostchallenging obstacle to overcome inembarking upon the human explorationof Mars.
•Provide an operationally simple missionapproach emphasizing the judicious useof common systems. For example, anintegrated mission in which a singlespacecraft with all elements needed tocarry out the complete mission islaunched from Earth and lands on Marsto conduct the long exploration programis not feasible due to launch massconsiderations alone. It is necessary todetermine the simplest and most reliableset of operations in space or on thesurface of Mars to bring all of thenecessary resources to the surface wherethey are to be used. A strategyemphasizing multiple uses for single
systems can potentially reduce the totalprogram costs and enhance crew safetyand system maintainability.
•Provide a flexible implementationstrategy. Mars missions are complex, somultiple pathways to the desiredobjectives have considerable value inensuring mission success.
•Limit the length of time the crew iscontinuously exposed to theinterplanetary space environment. Doingthis will reduce the physiological andpsychological effects on the crew andenhance their safety and productivity. Inaddition, the associated life scienceconcerns are partially mitigated. It isassumed that crews will arrive at Marsin good health, that full physicalcapability can be achieved within a fewdays, and that crew health andperformance can be maintainedthroughout the expedition.
•Define a robust planetary surfaceexploration capacity capable of safelyand productively supporting crews onthe surface of Mars for 500 to 600 dayseach mission. The provision of a robustsurface capability is a definingcharacteristic of the Reference Missionphilosophy. This is in contrast toprevious mission studies that haveadopted short stay-times for the first orfirst few human exploration missionsand focused attention principally onspace transportation.

3-12
•Be able to live off the land. Thecapability to manufacture resources atMars, particularly propellants, has longbeen known to have significant leveragein terms of the amount of material thatmust be launched from Earth. It alsoprovides a risk reduction mechanism forthe crew when viewed as a cache of lifesupport consumables to back up thosebrought from Earth. Additional systemdevelopment effort will be required, butthe advantages outweigh the cost anddevelopment risk, particularly if theinfrastructure supports more than onehuman exploration expedition.
•Rely on reasonable advances inautomation to perform a significantamount of the routine activitiesthroughout the mission. This includes acapability to land, set up, operate, andmaintain many of the Mars surfacesystems needed by the crew prior totheir arrival.
•Ensure that management techniques areavailable and can be designed into aprogram implementation that cansubstantially reduce costs.
•Use the Earth-Mars launch opportunitiesoccurring from 2007 through 2014. A2009 launch represents the most difficultopportunity in the 15-year Earth-Marstrajectory cycle. By designing the spacetransportation systems for thisopportunity, particularly those systemsassociated with human flights, they canbe flown in any opportunity with faster
transit times for the crew or increasedpayload delivery capacity for cargo. Thisenhances program flexibility.
•Examine at least three human missionsto Mars. The initial investment to send ahuman crew to Mars is sufficient towarrant more than one or two missions.Each mission will return to the site of theinitial mission, with missions two andthree launching in the 2012 and 2014launch opportunities, respectively. Thisapproach permits an evolutionaryestablishment of capabilities on the Marssurface and is consistent with the statedgoals for human exploration of Mars.Although it is arguable that scientificdata could be enhanced by landing eachhuman mission at a different surface site,the goal of understanding how humanscould inhabit Mars seems more logicallydirected toward a single outpostapproach. This leaves global explorationto robotic explorers or perhaps laterhuman missions.
3.2 Risks and Risk MitigationStrategy
Several related but also separable aspectsof risk are associated with a Mars mission andmust be considered in designing theReference Mission. Reference Missionactivities will inevitably be hazardousbecause they are conducted far from home inextreme environments. However, the hazardscan be reduced by proper design andoperational protocols. Before a Mars

3-13
exploration program is approved, it will benecessary to decide whether the elements ofrisk to the enterprise can be reduced to a levelconsistent with the investment in resourcesand human lives.
3.2.1 Risks to Human Life
Crews undertaking the humanexploration of Mars will encounter the activespace environment, the in-space environment,and the planetary surface environment.
The active space environment includeslaunch from Earth, maneuvers in near-Earthspace, launch on a trajectory to Mars, entryand landing on Mars, launch from Mars, Marsorbital maneuvers, launch on a trajectory toEarth, reentry of Earth’s atmosphere, andlanding on Earth. Because these are energeticevents, the risk is relatively high. In 100launches of United States manned spacecraftand a similar number of Russian spacecraft,the only fatal accidents have occurred inlaunch or landing. Once in space, theenvironment has been relatively benign.(Apollo 13 was an exception. En route to themoon, it experienced an equipment failurewhich jeopardized the crew. Because of thecharacteristics of the Earth-Moon trajectoriesand the spacecraft design, it was possible torecover the crew. This type of risk can beaddressed in part by the Mars explorationarchitecture, and can be different for humansand cargo.)
The quiescent in-space environment isrelatively benign from the point of view ofexplosions and other spacecraft accidents.
However, there are important and potentiallydeadly environmental hazards (such asradiation and meteoroid damage) which mustbe addressed. Two radiation hazards exist.First and most dangerous is the probability ofa solar proton event (SPE) which is likely tooccur during any Mars mission. Solar protonevents can rise to the level where an unshield-ed person can acquire a life threateningradiation dosage. However, shielding withmodest amounts of protective material canalleviate this problem. The task becomes oneof monitoring for events and taking shelter atthe appropriate time. Galactic cosmic rays, theother radiation hazard, occur in smallnumbers, are very energetic, and can causedeleterious effects over a long period of time.For astronauts in LEO, exposure to cosmicradiation has been limited to that level whichcould induce an additional 3 percent lifetimerisk of cancer (curable or incurable). Becauseof a policy that radiation hazards should bekept as low as reasonably achievable, space-craft and space operations must be designedto minimize exposure to cosmic rays. Thehealth risk today from radiation exposure ona trip to Mars cannot be calculated with anaccuracy greater than perhaps a factor of 10.The biomedical program at NASA has givenhigh priority to acquiring the necessary healthdata on HZE radiation, including the designshielding materials, radiation protectantmaterials, and SPE monitoring and warningsystems for the Mars crew. (For additionaldiscussion and explanation of this topic, seeNASA, 1992; Townsend, et al., 1990; andSimonsen, et al., 1990.)

3-14
The planetary surface is the thirdenvironment which provides risks to crews.Because operational experience on Mars islimited, this environment is the leastunderstood. As the objective of humanexploration of Mars will be to spend time onthe surface of Mars, extensive EVA will berequired as part of the mission. EVAs willinvolve exiting and reentering pressurizedhabitats and conducting a variety of activitieson the surface in space suits or otherenclosures (including vehicles). In this area,accidents and equipment failures are thebiggest concerns. These risks must beaddressed by examining a combination ofdetailed information about the surfaceenvironment, designing and testinghardware, and training the crew. To someextent, EVA can be reduced or simplified byusing telerobotic aids operated by the crewfrom their habitat. (The risks associated withthe habitat itself are probably similar to thosefaced in free space, with somewhat morebenign radiation and thermal environments.)Finally, the presence of dust on Mars willpresent risks, or at least annoyances, tosurface operations. Robotic missions to Marsprior to human expeditions should improveunderstanding of the surface hazards crewswill encounter.
3.2.2 Risks to Mission Success
The risk of a Mars exploration mission ismeasured by the degree to which the programobjectives can be accomplished. A successful
trip to and from Mars, without accomplishingany surface exploration objectives, would beonly minimally successful. Mission risk isrelated to the integrated capability of the crewand their systems to conduct the mission. Forthe crew or the systems to fail to perform putsthe mission at risk of failure. On the humanside, this requires attention to health, safety,performance, and other attributes of aproductive crew. On the system side, thisrequires that systems have low failure rates,have robust backups for systems that may failor require repair, and be able to operatesuccessfully for the required period of themission. Strategies to minimize failure can bedesigned at the architecture level or at thesystem level.
3.2.3 Risks to Program Success
Program risk is a term that refers to theprogrammatic viability of the explorationprogram—that is, once the program has beenapproved, what are the risks that it will not becompleted and the exploration notundertaken? These are programmatic issuesthat in many cases seem less tractable thanthe technical risks. They can be influencedwhen management of the enterprise fails tomeet milestones on schedule and cost, whenunforeseen technical difficulties arise, orwhen political or economic conditionschange. They can be mitigated by soundprogram management, good planning, andadvocacy or constituency building on thepolitical side.

3-15
3.2.4 Risk Mitigation Strategy
The riskiest part of the first explorationmissions to Mars may well be the risk ofaccident on launch from Earth, and theenergetic events of launches and landingsduring other phases of the mission are likelyto make up the remaining high risk parts ofthe mission. Yet, the environment on thesurface of Mars will be new and untried, themissions will be long, and the opportunitiesto make up for error small. Therefore, aconscious approach to minimizing risks onthe martian surface must be adopted. For astarting point, it is assumed that this riskmust be smaller than the combined risks of allof the energetic events. Design requirementswill have been developed with this in mind.
The strategy for reduction of risks on thesurface involves four levels of consideration.At the top level, the mission architectureprovides for assurance that all systems willoperate before crews are launched from Earth.The strategy must be flexible in allowingsubsequent robotic missions to replace anysystems shown not to be functional prior tosending crew. This, in turn, places designrequirements on the hardware to allowproblems to be identified, isolated, fixed inplace if possible, and bypassed if necessarythrough the addition of a parallel capabilitysent on a subsequent flight.
The second level of risk reductioninvolves providing redundancy through theoverlapping functional capabilities betweenvarious systems, the ability to repair any life-critical systems, and the provision of a
suitable suite of replacement systems asbackups to the prime systems. The followingpriorities are recommended.
•Crew health and safety are top priorityfor all mission elements and operations;life-critical systems are those absolutelyrequired to ensure the crew’s survival.This implies that life-critical systems willhave two backup levels of functionalredundancy; if the first two levels fail, thecrew will not be in jeopardy but will notbe able to complete all mission objectives.At least the first level of backup isautomated. (This is a fail operational/failoperational/fail-safe system.)
•Completing the defined mission to asatisfactory and productive level(mission-critical) is the second priority.This implies that mission-criticalobjectives will have one automatedbackup level. (This is a fail operational/fail-safe system.)
•Completing additional, possiblyunpredicted (mission-discretionary),tasks which add to the total productivityof the mission is third priority. The crewwill not be in jeopardy if the mission-discretionary systems fail, and a backupis not needed. (This is a fail-safe system.)
The systems contributing to this backupstrategy were assumed to be provided byeither real redundancy (multiple systems ofthe same type) or functional redundancy(systems of a different type which provide therequired function). Recoverability or

3-16
reparability by the crew will provide yetadditional safety margins.
The third level of risk reduction involvesthe automation of systems including faultdetection, failure projection, and maintenanceactivities, and the provision of data thatdemonstrate current status and predict futurestates. Such systems are not only conservativeof crew time, but also more effective andprecise, particularly on routine monitoringand control tasks.
The fourth level of risk reduction isrelated to crew training and proficiency. Thebiggest concern in this area is that the crewwill be away from the traditional Earth-basedtraining environment for years at a time.Those areas with direct humaninvolvement—EVA, life support systems,high capacity power systems, propellantproduction and storage, mobile vehicles, andother complex facilities—all carry a high riskfor accident, particularly if training is notrecent or crew members becomeoverconfident. Crews will most likely berequired to participate in continuous tasktraining for safety awareness requirements.
3.3 Flight Crew
Humans are the most valuable missionasset for Mars exploration and must notbecome the weak link. The objective forhumans to spend up to 600 days on themartian surface places unprecedentedrequirements on the people and theirsupporting systems. Once committed to themission on launch from LEO, the crew must
be prepared to complete the full missionwithout further resupply from Earth.Unlimited resources cannot be providedwithin the constraints of budgets and missionperformance. Their resources will either bewith them or will have already been deliveredto or produced on Mars. So trade-offs must bemade between cost and comfort as well asperformance and risk. Crew self-sufficiency isrequired because of the long duration of theirmission and the fact that their distance fromEarth impedes or makes impossible thetraditional level of communications andsupport by controllers on Earth. The crewswill need their own skills and training andspecialized support systems to meet the newchallenges of the missions.
Crews should be selected who will agreeto conduct operational research willingly andopenly. Crew members should be selectedwho can relate their experiences back to Earthin an articulate and interesting manner, andthey should be given enough free time toappreciate the experience and the opportunityto be the first explorers of another planet.
Because the objectives of the missions areto learn about Mars and its capability tosupport humans in the future, there will be aminimum level of accomplishment belowwhich a viable program is not possible.Survival of humans on the trip there and backis not a sufficient program objective.
3.3.1 Crew Composition
The number of crew members to be takento Mars is an extremely important parameter

3-17
for system design, because the scale of thehabitats, space transportation system, andother systems supporting the mission aredirectly related to the number of crewmembers. This, in turn, will have a directrelationship to the cost of the first missions.The size of the crew also is probably inverselyproportional to the amount of newtechnology which must be developed to allowall tasks to be performed. Because ofcommunication time delays between Earthand Mars, some functions that havepreviously been performed by people onEarth will be carried out autonomously or bycrew members. Generally, there will be a highdegree of automation required for routineoperations on the Mars journey to allow crewmembers to do specialized tasks.
For the Reference Mission study, it wasassumed that crew health and safety are offirst priority in successfully achieving missionobjectives and that the surface system designrequirements for operability, self-monitoring,maintenance, and repair will be consistentwith the identified minimum number of crewmembers. The crew size and composition wasdetermined in a top-down manner (objectives➝ functions ➝ skills ➝ number of crewmembers + system requirements) as thesystems have not been defined in a bottoms-up manner based on an operational analysisof the system.
The Mars Study Team workload analysisassumed that the crew would spend availabletime in either scientific endeavors orhabitation-related tasks. From that analysis,
lists of required skills were developed.Expertise is required in three principal areas.
•Command, control, and vehicle andfacility operations functions. Thesefunctions include command,management, and routine andcontingency operations (piloting andnavigation, system operations,housekeeping, maintenance, and repairof systems). Maintenance must beaccomplished for facility systems,human support systems (medicalfacilities, exercise equipment, etc.), EVAsystems, and science equipment.
•Scientific exploration and analysis. Thisarea includes field and laboratory tasksin geology, geochemistry, paleontology,or other disciplines associated withanswering the principal scientificquestions.
•Habitability tasks. These tasks includeproviding medical support; operatingthe bioregenerative life support systemexperiment; performing biological,botanical, agronomy, and ecologyinvestigations; and conducting otherexperiments directed at the long-termviability of human settlements on Mars.
The types of crew skills needed areshown in Table 3-2 (Clearwater, 1993). If eachskill is represented by one crew member, thecrew size would be too large. Personnel willhave to be trained or provided the tools toperform tasks which are not their specialty.
3-18
Special skill requirements appear to be in theareas of medicine, engineering, andgeoscience.
•Medical treatment. In a 3-year mission, itis very likely that an accident or diseasewill occur. At least one medically trainedperson will be required as well as abackup who is capable of conducting
procedures under the direction ofmedical experts on Earth (throughtelemedicine).
•Engineer or technician. A person skilledin diagnosing, maintaining, andrepairing mechanical and electricalequipment will be essential. A highdegree of system autonomy, self-diagnosis, and self-repair is assumed forelectronic systems; however, the skill to
Table 3-2 Surface Mission Skills
Specialized Operations Focused and Services Objectives In-Common
GeologyGeochemistryPaleontologyGeophysics including Meteorology and Atmospheric Science
BiologyBotanyEcologyAgronomySocial Science
Management/planningCommunicationsComputer SciencesDatabase Management
Food Preparation• routine greenhouse operations• plants to ingredients• ingredients to food
Vehicle ControlNavigationTeleoperated Rover Control
Journalism
Housekeeping
Mechanical Systems Operations, Maintenance and Repair
Tool-Making
Electrical Systems Operations, Maintenance and Repair
Electronics Systems Operations,Maintenance and Repair
General Practice Medicine
Surgery Biomedicine
Psychology Psychology
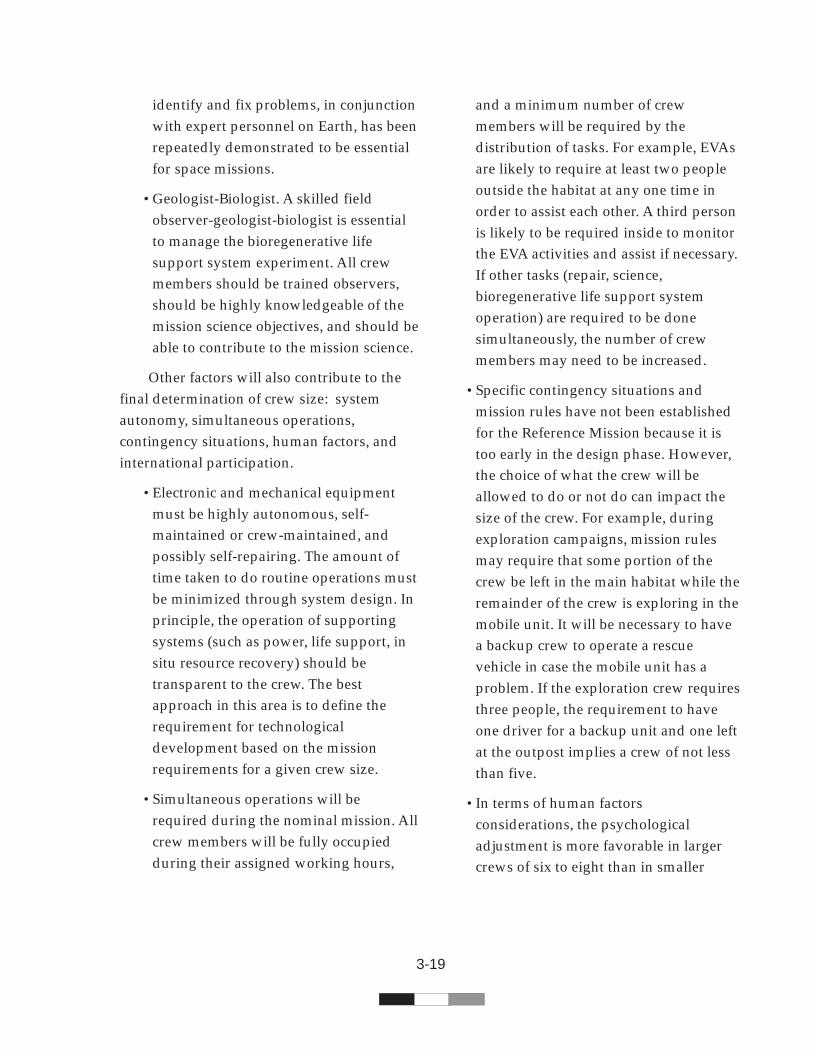
3-19
identify and fix problems, in conjunctionwith expert personnel on Earth, has beenrepeatedly demonstrated to be essentialfor space missions.
•Geologist-Biologist. A skilled fieldobserver-geologist-biologist is essentialto manage the bioregenerative lifesupport system experiment. All crewmembers should be trained observers,should be highly knowledgeable of themission science objectives, and should beable to contribute to the mission science.
Other factors will also contribute to thefinal determination of crew size: systemautonomy, simultaneous operations,contingency situations, human factors, andinternational participation.
•Electronic and mechanical equipmentmust be highly autonomous, self-maintained or crew-maintained, andpossibly self-repairing. The amount oftime taken to do routine operations mustbe minimized through system design. Inprinciple, the operation of supportingsystems (such as power, life support, insitu resource recovery) should betransparent to the crew. The bestapproach in this area is to define therequirement for technologicaldevelopment based on the missionrequirements for a given crew size.
•Simultaneous operations will berequired during the nominal mission. Allcrew members will be fully occupiedduring their assigned working hours,
and a minimum number of crewmembers will be required by thedistribution of tasks. For example, EVAsare likely to require at least two peopleoutside the habitat at any one time inorder to assist each other. A third personis likely to be required inside to monitorthe EVA activities and assist if necessary.If other tasks (repair, science,bioregenerative life support systemoperation) are required to be donesimultaneously, the number of crewmembers may need to be increased.
•Specific contingency situations andmission rules have not been establishedfor the Reference Mission because it istoo early in the design phase. However,the choice of what the crew will beallowed to do or not do can impact thesize of the crew. For example, duringexploration campaigns, mission rulesmay require that some portion of thecrew be left in the main habitat while theremainder of the crew is exploring in themobile unit. It will be necessary to havea backup crew to operate a rescuevehicle in case the mobile unit has aproblem. If the exploration crew requiresthree people, the requirement to haveone driver for a backup unit and one leftat the outpost implies a crew of not lessthan five.
•In terms of human factorsconsiderations, the psychologicaladjustment is more favorable in largercrews of six to eight than in smaller

3-20
crews of three to five. However, thepsychological environment may be metby system and support provisions ratherthan by the crew size itself.
•It is conceivable that each country thatmakes a major contribution to aninternational Mars exploration missionwill demand representation on the crew.Currently, a Mars crew might bepatterned after the International SpaceStation with representatives from theUnited States, Russia, European SpaceAgency, and Japan. However, in anenterprise of this magnitude, ThirdWorld representatives might also beselected by the United Nations.
At a summary level, the five mostrelevant technical fields required by theexploration and habitation requirementsinclude mechanical engineer, electrical andelectronics engineer, geologist, life scientist,and physician-psychologist. These fieldsshould be represented by a specialist, with atleast one other crew member cross-trained asa backup. Crew members would also becross-trained for the responsibilities of a widevariety of support tasks as well as tasks ofcommand and communications.
The result of the workload analysisindicates that the surface mission can beconducted with a minimum crew of five,based on the technical skills required.However, loss or incapacitation of one ormore crew members could jeopardize mission
success. Therefore, a larger crew may berequired to address the risk issues. Currently,the Reference Mission is built on theassumption of a crew of six.
3.3.2 Crew Systems Requirements
To survive, the crew will need adequateshelter, including radiation protection;breathable, controlled, uncontaminatedatmosphere (in habitats, suits, andpressurized rovers); food and water; medicalservices; psychological support; and wastemanagement. During the 4- to 6-month transitto Mars, the chief problems will bemaintaining interpersonal relationshipsneeded for crew productivity andmaintaining physical and mentalconditioning in preparation for the surfacemission. On the Mars surface, the focus willturn to productivity in a new and harshenvironment. The transit environment islikely to be a training and conditioningenvironment, the surface environment iswhere the mission-critical tasks will be done.
For long-duration missions withinevitably high stress levels, the trade-offbetween cost and crew comfort must beweighed with special care. High qualityhabitats and environmental design featuresare critical to assuaging stress and increasingcrew performance—conditions that willgreatly increase the likelihood of missionsuccess. Providing little more than thecapability to survive invites mission failure.
Not all amenities need be provided onthe first mission. The program should be

3-21
viewed as a sequence of steps which, overtime, will increase the amount of habitablespace on the surface, increase the amount oftime available to the crew to devote tomission objectives and personal activities,increase the amount of crew autonomy,improve the quality of food, increase access toprivacy, and increase the quality and quantityof communications with Earth. In addition,experience in Mars surface operations mayreduce some of the stresses associated withthe unfamiliarity of the environment.
The quality of life can be enhanced byaccess to and use of indigenous resources. Inthe near term, use of indigenous resourcesreduces some of the mission risks (creation ofcaches, use of local resources for radiationshielding, etc.). In the long term, use of localresources may allow more rapid expansion ofusable space. Achieving the capability toproduce water and oxygen from localresources may have physical andpsychological benefits over continuedrecycling (for example, reducing limitationson water utilization for hygiene purposes).The ability to grow food on site also has anenhancing psychological effect. Thepsychological impacts of these developmentsis difficult to quantify, however real the effectsmay be.
Finally, crew support by intelligent robotsand automated systems appears to be a goodinvestment from the point of view of totalmission productivity. The workload analysisindicates that the total amount of time spentin the field (on foot or in a rover) by a crew
member will be from 10 percent to 20 percentof the amount of their time on Mars.Automated or teleoperated rovers couldextend the effective field time by crewmembers.
3.4 Mission Operations
Central to the success of the ReferenceMission is the accomplishment of all activitiesassociated with mission objectives. To thisend, crew operations are an essential part ofensuring program success and must befactored into all aspects of program planning.All crew activities throughout each mission,from prelaunch through postlanding,constitute crew operations. The majority ofcrew activities fall into four categories:training, science and exploration, systemsoperation and maintenance, andprogrammatic.
•Training activities include such areas asprelaunch survival training for all criticallife support systems, operational andmaintenance training on mission-criticalhardware, prelaunch and in-flightproficiency training for critical missionphases, and science and researchtraining for accomplishing primaryscience objectives.
•The majority of science and explorationactivities will be accomplished on thesurface of Mars. They include, but arenot limited to, teleoperated roboticactivities, habitability experiments, localand regional sorties, and planetary

3-22
science investigations. Supplementalscience objectives may be accomplishedduring other phases of the mission aswell.
•During the first mission, a substantialamount of crew time will be spentoperating and maintaining vehiclesystems. This time allocation is expectedto decrease with subsequent missions asthe systems and operational experiencebase matures.
•Lastly, programmatic activities for thecrews include publicity, documentation,reporting, and real-time activityplanning.
This report does not make specificconclusions regarding hardwarerequirements, facilities requirements, andtraining programs, but a number ofrecommendations and guidelines regardingthese areas have been developed and tailoredto the various mission phases that will beexperienced by each crew sent to Mars. Whilethese and other crew activities may not beseen as directly affecting program success, allareas contribute to the successful completionof each mission and are, therefore, essential tothe overall success of the Reference Mission.
3.4.1 Training Guidelines
The key to successful operations ishaving well prepared, knowledgeable teammembers. This knowledge and preparation ismost effectively obtained by training fornominal and contingency operations.
Extensive training in these areas will improveoverall mission success as well as contributeto meeting science and exploration objectives.Several overriding principles must govern theway training is conducted for the ReferenceMission. Due to time constraints, crewtraining in preparation for the first missionmust be done concurrently with vehicle andtraining facility development. The first crewand mission controllers will be supplantingoperational training with involvement insystem design and testing. This will providethe mission team with the needed systemfamiliarity which would otherwise come fromoperational training exercises. Operationsinput on system designs also has the addedbenefit of enhancing vehicle functionality andoperability (for example, nominal dailyoperations such as housekeeping, foodpreparation, and system maintenance willbenefit from input by the actual users).
Additional prelaunch training mustemphasize developing a working knowledgeof life-critical and mission-critical elements.Because reliance on Earth-based groundcontrol becomes more difficult and less time-responsive as the mission progresses towardMars, crew self-sufficiency becomes essential.In-depth training on life-critical and mission-critical systems will enable crews to becomemore self-sufficient. Contingency survivaltraining for failures in critical life supportsystems will also be required as real-timeground support will not be possible duringMars surface operations and similar remotephases of flight.

3-23
Extensive preflight and in-flight trainingon critical event activities (such as majorpropulsive maneuvers, Mars atmosphericentry, surface sorties, and Earth atmosphericentry) will be required to ensure crewproficiency during these busy time periods.The need for such training will requirepreflight development of a well-definedactivity plan for all critical events.Significantly less preflight training will berequired for noncritical, mission-success-oriented activities such as surface scienceoperations. The initial surface operationsrequired for the establishment of the Marssurface base and preliminary surface scienceactivities will be well defined before the firstcrew departs. Subsequent exploration andscience activities will depend on the findingsfrom the initial scientific investigations. As aresult, training for more than the initialscience activities will not be feasible. Instead,it will be necessary to ensure that crews havethe skills to enable them to plan and prioritizereal-time activities in support of the overallmission objectives. Some planning assistanceand direction will be provided by groundpersonnel; however, the responsibility fordetailed planning and execution will residewith the crew. They are on the surface andhave firsthand knowledge of environmentaland logistical considerations.
Due to the length of the mission andlength of time between critical eventactivities, proficiency training will benecessary during all phases of the mission. Inflight and on the martian surface, training for
critical events will ensure that crews areadequately prepared for both nominal andcontingency situations. From Earth launchuntil Mars ascent and TEI is about 2 yearswhich necessitates an ongoing trainingregime to maintain proficiency. The Earth-based training the crews received 2 yearsearlier prior to Earth launch will not besufficient. Training for the Mars atmosphericentry and landing phase will be conducted bythe crew during the transit between Earth andMars. While on the martian surface andintermixed with other surface activities, thecrew will conduct proficiency training for thecritical Mars ascent phase, subsequentdocking with the ERV, and trans-Earthpropulsive maneuver. In-flight and surfacetraining requirements dictate the need foreffective training facilities in the habitatvehicles or in the ascent vehicles. Design anddevelopment of such facilities will requirefurther investigation and is beyond the scopeof this preliminary report.
Documentation in the form of computer-based libraries must be available foroperational instruction, maintenance of andtroubleshooting systems, and hardwarefailures. Reliable and immediate access to thistype of information will supplement crewtraining for all types of activities frommission-discretionary to life-critical. Extensivecomputer-based resources will have theadded effect of increasing crew self-sufficiency during remote mission phases.
The final, but by no means leastsignificant, element of crew training will be

3-24
the feedback provided by the early crews ontraining applicability and effectiveness relatedto all mission phases. Feedback from the firstcrew in particular will need to beincorporated into training procedures,hardware, and facilities to be used bysubsequent crews. An effective channel forincorporating this feedback into redesign andupgrading of systems and procedures will beessential for follow-on crew training.
3.4.2 Science and Exploration
The majority of science and explorationactivities will be accomplished on the surfaceof Mars. They include, but are not limited to,teleoperated robotic activities, habitabilityexperiments, local and regional sorties, andplanetary science investigations. Additionalscience activities which supplement theprimary science objectives may beaccomplished during other phases of themission as well; however, the largest portionof time and activity allocated in support ofscience and exploration will occur on theplanetary surface.
Initial surface science activities will bewell defined before each crew departs Earth.Detailed activity planning to maximize thecrews useful science and exploration time willincrease overall mission success and will benecessary to ensure the successful completionof many primary science objectives andmission safety requirements. Manyinvestigative results designed to satisfy safetyrequirements (for example, tracking crewhealth) will contribute to satisfying science
objectives as well. Detailed identification ofsafety requirements and related activities isnot required until later in the missionplanning process and will not be discussedhere.
Subsequent exploration and scienceactivities will depend on the findings fromthe initial scientific investigations. As a result,it will be necessary for crews to do real-timescience activity planning to continue researchactivities. Principal investigators and groundsupport personnel will provide the guidelinesfor use in planning priorities of missionobjectives. However, the detailed proceduresfor executing science activities must be left, ingeneral, to the crews who have firsthandknowledge of the unique environmental andlogistical considerations of this mission.Additionally, eliminating the excessiveground planning and replanning activitieswhich have been customary for near real-timemanned space operations will reduce cost.
Beyond the initial investigations, severalsurface science and exploration activities canbe identified preflight as targets for detailedplanning and execution: teleroboticexploration and local and regional surfacesorties. Such preflight planning will maximizethe crew’s useful science time, maximizescience return, improve crew safety ondifficult exercises, and increase overallmission success.

3-25
3.4.3 Systems Operations andMaintenance
During the first mission, a substantialamount of crew time will likely be spentoperating and maintaining vehicle systems.This time is expected to decrease withsubsequent missions as the systems andoperational experience base mature.However, until that time, the more familiarthe crews are with all systems, the less timeoperations and maintenance will take fromscience and exploration activities. To enhancecrew familiarity with the numerous vehiclesystems prior to launch, crews should beinvolved in the design and testing of primaryvehicle systems. The resulting intimateknowledge of the vehicle systems has theadded benefit of supplementing crew trainingon their operational use. Another way tofacilitate crew familiarity is to ensure thatsystem designs are modular and easilyrepairable. The simpler and more familiar thedesign, the easier it is to repair and maintain.
Due to the nature of the ReferenceMission program design (where vehicles areplaced in a standby mode and subjected tohostile environments for long durations), in-depth vehicle and system checkouts will berequired periodically. Crew participation inthese activities should be minimized but maybe necessary due to their access to some of thesystem hardware. Such access andparticipation may make the crews uniquelysuited for analysis of anomalous results thatmight appear in the system testing.
Where applicable, autonomous vehiclehealth monitoring and testing will enablecrew members to use their time performingscience and exploration activities. Inconjunction with this automation, access tohardware and software documentation for allsystems can expedite operations andmaintenance activities which require crewparticipation. Additionally, due to largeresource requirements, some of the vehicleoperations, such as long-term healthmonitoring, trend development or prediction,and failure analysis, may be accomplished byground system support personnel. Thedelineation between which system functionsare automated, crew-managed, or ground-support-managed is not clear and is subject toa host of variables. Some of the considerationsto be used in making this determination arecrew useful time, availability of supportingdocumentation, knowledge of systemperformance (that is, are we operating outsidethe envelope?), time criticality of failurerecognition and recovery, and constraints ondevelopment time and cost. Generalguidelines of responsibility for vehicleoperations are best determined early in thedesign process as automation of functionswill affect mission and vehicle design.
3.4.4 Programmatic Activities
Programmatic activities for the crewsinclude publicity, documentation, reporting,and real-time activity planning. These typesof activities are not usually seen as directlyaffecting program success. They do, however,

3-26
and if properly planned and coordinated, willenhance crew performance and interaction.Like vehicle performance, crew performanceis key to a successful mission.
Successful team performance andinteraction depends on having defined rolesand responsibilities and the flexibility tohandle real-time events. For complexprograms like the Reference Mission, this isimportant not only among crew memberteams, but also among ground supportpersonnel teams and between ground supportand the crews. For the crews, knowing who isresponsible for what and when makes forsmoother operations and can alleviate someof the stress associated with long-term, smallspace, personnel interaction. For ground andcrew interaction, clear rules governing who isin charge of what activities and whodetermines what gets done and when areessential for maximizing mission and scienceobjective returns and alleviating confusionespecially during remote operations. This willenhance operational performance whencombined with a flexible operationalarchitecture allowing crews to create andoptimize the methods required to handle real-time events and achieve set objectives andgoals. (Further discussion on groundoperations and team interaction can be foundin Section 3.8.)
Public affairs activities have been andalways will be an integral part of crewactivities. While they absorb resources(mostly time), they also bring public and
political support to programs and contributeto program success. Crew resources frompreflight through postlanding will have to beallocated in support of this activity.
Another element which contributes toprogram success is the crew feedback on allaspects of the mission. Their input on systemdesigns, operations, science activities (forexample, appropriateness, preparedness,required hardware), and training effectivenessis necessary for the continued improvementand enhancement of follow-on missions.Along these same lines, documentation of allactivities (such as procedural changes, lessonslearned, observations, hardwarediscrepancies) is a time-consuming butnecessary crew activity. (Using variouselectronic systems rather than similar papersystems for documentation preparation willprovide savings in terms of mass, reliability,reduced consumables, etc.) Crew records canbe used to contribute to mission feedback aswell as documentation. Documentation andfeedback are important, especially for the firstcrew, to ensure optimal use of the subsequentcrew’s time and to enhance the chances ofsuccess of future missions of this type.
3.4.5 Activity Planning
The level of crew operations in training,science and exploration, systems operationsand maintenance, and programmaticactivities varies throughout different phasesof the mission; however, some characteristicsare consistent throughout the phases. Forinstance, life-critical or mission-critical

3-27
activities, regardless of mission phase, requiredetailed planning and precise execution. Incontrast, non-life-critical or mission-criticalscience and exploration activities may rely onreal-time procedures generated by the crewwhose guidelines for planning will be toachieve set mission objectives and goals.Guidelines for crew activity planning mustincorporate the flexibility to adapt to thecrew’s experience as they learn to live andwork in a new environment.
In general, crew activity planning mustbe done using a relatively fixed format andtimeline. This will allow crew members toreadily adapt to the various environments inwhich they will be expected to work and live.Having regular awake and sleep times,consistent meal times, etc., from phase tophase will help the crew adapt to missionphase transitions. Having a consistent lengthworkday is also important. With the Mars daylasting nearly 25 hours, adhering to an Earth-based daily schedule of 24 hours wouldroutinely have the crew awake duringmartian night. A consistent 25-hour daythroughout all phases of flight should beconsidered.
A typical work schedule on the SpaceShuttle has crew members workingthroughout an entire flight, only getting timeoff during extremely long flights (thoseapproaching 2 weeks in duration). Formissions that can last a number of years, aconsistent long-term work schedule must bedeveloped that will give crew memberssufficient time off yet maintain productivity
and the success of mission objectives.Feedback from the crew will be importantduring the early phases of this mission, asboth ground support and flight crewmembers adapt to the unique environmentaland operational challenges of the mission.
3.4.5.1 Prelaunch Phase
Crew activities during the prelaunchphase of the mission will concentrate ontraining activities for all mission phases. Earlyon in the program development, crewinvolvement in design and testing of primarysystems will help facilitate crew familiaritywith the systems and enhance applicability ofsystem designs. The resulting intimateknowledge of the vehicle systems has theadded benefit of supplementing crew trainingon their operational use. Extensive training onnominal everyday operations (such ashousekeeping and food preparation) will alsomake the crew more comfortable in theirchanging environments. Strong emphasis oncritical life support and mission-criticalsystems training will also be required.
An important part of crew trainingactivities in this prelaunch phase will beparticipation in integrated training activitieswith scientists and systems engineers.Preflight interaction with the sciencecommunity, in the form of experimentalexercises (crews learn to conduct scientificinvestigations) and exploration exercises(crews simulate local and remote sortieoperations) will enhance overall missionsuccess and scientific return. This will benefit

3-28
not only the crew but also the ground scienceand systems teams by forcing them to interactin a way that will be unique to remoteoperations.
Crew involvement in integrated trainingfor critical activities (such as launch, injectionphase, Earth orbit systems checkout, Marslanding phase, return phases) will be neededto ensure crew proficiency and performanceduring these phases. Simulations which stressthe crew and ground support by introducingfailures and abort scenarios will help ensurecrew safety should such instances occurduring the mission.
In addition to prelaunch trainingactivities, extensive medical testing will berequired of the crew during this time. Theirlong- and short-term health will be criticalfactors in the success of this type of long-duration mission.
3.4.5.2 Earth Launch Phase
The Earth launch phase is defined as thecrew activities required to support missionactivities from launch through TMI andsubsequent powerdown of nonessentialhardware. It is expected that some systemsused during the launch phase will not berequired until later in the mission. Thehardware which fits in this category will beplaced in a quiescent mode to conserveresources.
During the Earth launch phase of themission, the crew’s primary focus will be toensure a safe launch and Mars injection.
Nominal actions directly associated with thelaunch are expected to be minimal. Once inorbit, crew activities will center on a completecheckout of vehicle systems prior to leavingEarth orbit while near real-timecommunications with ground support arepossible. This checkout will include all life-critical, mission-critical, and mission-discretionary systems with appropriateactions being taken for anomalies on eachsystem according to its criticality. Such acheckout, which will be as automated aspossible, will require some crew and groundsupport actions either for testing or fortroubleshooting failures.
While in Earth orbit but before TMI,limited time or personnel may cause some ofthe less critical pre-TMI testing to be deferred.For instance, testing on mission-discretionaryhardware intended for use only on themartian surface may be delayed until later inthe transit to Mars. Such decisions will bemore appropriately made when vehiclesystem checkout requirements are identifiedduring the design process. Additionally, suchreal-time decisions may be made based onassessments of other activities during theEarth orbit phase.
Training activities will not be scheduledduring the Earth launch through TMI phaseof the mission as the crew will have beentrained for these activities prior to launch.Additionally, with the exception of thoseactivities related to crew health maintenanceand monitoring, planned science activitieswill not be performed during this high

3-29
systems activity time frame. Medical testingand assistance may be required during thisphase as crew members adapt to the changein environment. (The number of crewmembers who typically do not experiencespace sickness during the first few days ofweightlessness is just one in three based on171 Shuttle crew members (Reschke, et al.,1994).) Any serious life- or mission-threatening crew illness prior to TMI will bereason to abort the mission.
Throughout all mission phases,documentation of activities and feedback ontraining effectiveness will be required of allcrew members. This will be essential in orderto make effective use of the training time ofthe follow-on crew and the program’straining hardware. Due to the high systemsactivity during this phase, documentationand other programmatic activities will beeither minimal or deferred to a later time.
3.4.5.3 Trans-Mars Phase
The trans-Mars phase of the mission isdefined as crew activities from post-TMIsystem powerdown through Mars OrbitInsertion (MOI) preparation. Thisinterplanetary transit phase will be fairlyhomogeneous from the standpoint ofenvironment and crew activity. Crewactivities related to vehicle systems areexpected to be minimal. Only nominaloperations (housekeeping, food preparation,etc.) will be required unless mission-discretionary systems testing has beenpostponed until after TMI. This decision may
be made prior to launch based on time orpersonnel constraints or based on the result ofearlier failures. Activities for failure analysisand troubleshooting will be accomplished onan as needed basis.
The relatively quiescent vehicle systemactivity during the transit phase makes itwell-suited for crew training activities.During this time, additional training time canbe made available for the training above andbeyond the preflight training that is requiredto maintain crew proficiency during therelatively long Mars transit time. The need forin-flight training will require that trainingsimulators be available to the crew in thetransit-habitat vehicle. Critical events that willrequire training during this time are MOI,landing, and Mars launch activities.Additional time may also be made availablefor training and review of payload andscience hardware to be used on the surface.
During the transit phase, time may beavailable for limited science activities. Theprimary restriction on conductinginterplanetary science activities will likely bemass related. Interplanetary science(astronomy, solar observations) is not theprimary science objective for this type ofmission; and, as such, related hardware willonly be provided for crew use if massmargins exist at the appropriate point in thedesign process. However, there may beopportunities for useful scientific data returnwhich can “piggy-back” on instrumentsprovided for crew safety issues. An examplewould be conducting some solar science

3-30
experiments as part of meeting requirementsfor crew safety (as in solar flare detection).Also, medical testing will be requiredperiodically throughout this phase to verifycrew health. Related studies on crewadaptation to the space environment andother health-related biomedical scienceexperiments may benefit from such testing.
As with all mission phases,documentation of activities and feedback ontraining effectiveness will be required of allcrew members in order to make effective useof the follow-on crew’s training time.Additionally, the information will provideengineers on Earth with guidelines forupgrading and improving the vehicle systemsand training hardware. Transit time is idealfor documenting current and earlier phases ofthe mission.
Due to the high interest in such amission, the crew will be required toparticipate in numerous public affairsactivities. International participation in thistype of mission will only increase pressdemands on crew time. Press and crewexchanges will be particularly productiveduring relatively quiescent periods early inthe transit phase when communication lagtimes are short. As communication lag timeincreases, the necessity for crew autonomywill become evident. However,communication with Earth will still have tobe provided for failure assistance and crewpersonal interaction with Earth.Communication activities will be higherduring the initial and critical mission phases,
and appropriate time must be allocatedduring the crew schedule for such activities.
3.4.5.4 Mars Landing Phase
The Mars landing phase is a verydynamic phase of the mission and is definedas the time from MOI preparation throughpostlanding crew recovery and surfacesystem activation. Many of the activitiesduring this time frame will have beenplanned in detail before launch and perhapsupdated during the interplanetary transit.
Prior to MOI the crew will have toprepare the transit-habitat vehicle fortransition from a zero-g to a partial-g surfacevehicle. All peripherals, supplies, andhardware that have been taken out for useduring transit will have to be safely stowed.Nonessential equipment will be powereddown in exchange for equipment necessaryfor this phase of flight. During this time, thecrew will have to checkout or verify theoperational status of all hardware andsoftware required for the upcoming criticalMOI and landing activities.
Pre-MOI activities must be initiated earlyenough to allow sufficient time totroubleshoot any failures or discrepanciesprior to the critical phase. Many of theactivities during this phase will, by necessity,be automated. However, crew interventionand override must be available due to theuniqueness and criticality of this phase of themission (for example, doing critical activitieswithout real-time support in a new andunique environment) and in general as abackup to the automated systems.

3-31
After landing, a thorough vehiclecheckout will be necessary due to the drastictransition in operational environment fromvacuum and zero g to a planetary surfaceenvironment. Initially, the only checkoutwhich will be done will be on those systemsrequired to certify that crew safety and life-support systems and their backups areoperational.
Crew training activities during the latterpart of the transit phase and the early part ofthe landing phase will intensely focus oncritical activities for the MOI and landingphase so that the crew is adequately preparedfor upcoming events. Again, this will requirethat adequate training facilities be available tothe crew on the transit-habitat vehicle.
Minimal science activities will be doneduring the Mars landing phase. Time may beavailable for limited orbital observations totake advantage of the unique opportunity tophotograph and gather remotely sensed dataof Mars on approach and from orbit.However, this will depend on the availablemass allocated for this type of equipment, thesuccess of the higher priority critical systems,and the training activities during this timeframe.
Due to the high systems activity duringthis phase, documentation and otherprogrammatic activities will be minimal.Those activities necessary to improve thefollow-on crew’s training time and programtraining hardware will be deferred until thecrew has time available.
On approach and on the surface of Mars,communication lag time with Earth will benear or at its maximum. During such a criticalphase of flight, crew functions will, ofnecessity, be virtually autonomous fromEarth-based support. Some communicationwith Earth will still have to be provided forfailure assistance and vehicle healthmonitoring of trend data. Such requirementsmay drive the need for regular, perhapscontinuous, communications capability withEarth.
3.4.5.5 Mars Surface Phase
The Mars surface phase is defined aspostlanding recovery operations to prelaunchoperations. In general, this phase of themission will receive a minimal amount ofmission-specific planning and training priorto departing Earth; its focus will be on themission’s primary science and explorationactivities which will change over time toaccommodate early discoveries. A generaloutline of crew activities for this time periodwill be provided before launch and updatedduring the interplanetary cruise phase. Thisoutline will contain detailed activities toensure initial crew safety, make basicassumptions as to initial science activities,schedule periodic vehicle and systemcheckouts, and plan for a certain number ofsorties. Much of the detailed activity planningwhile on the surface will be based on initialfindings and therefore cannot beaccomplished before landing on Mars.However, the crew will be provided with

3-32
extensive, but not mission-specific, trainingrelated to scientific investigation and vehiclesystems. This will assist the crew in planningspecific activities in these areas, as required,while on the martian surface.
Initial postlanding systems activities willfocus on hardware testing and verification forlife support, then mission-critical, and finallymission-discretionary systems. The initialphase of these checkouts must be donewithout the requirement for EVAs. EVAs willbe restricted until sufficient data have beencollected to fully characterize the immediatemartian environment. Once it has beenconfirmed that the martian environment isnot a threat to crew health or mission success(assuming this has not been done by priorrobotic missions), EVAs may then beaccomplished to complete required systemstesting and verification.
During the crew stay-time on the surfaceof Mars, additional full-scale testing andverification of some hardware will berequired. After vehicle system checkout of thecrew habitat shortly after crew arrival,activities for joining the crew habitat with apreviously landed laboratory may begin.Complete connection of these two vehicleswill be accomplished after a full verificationof each vehicle’s individual integrity iscompleted. Also during the initialpostlanding time frame, verification andsystem status check of the vehicles needed forcrew launch and Earth return will berequired. While much of this activity will beautonomous and supervised by ground
operations personnel, crew involvementprovides the crew with confidence in theirreturn systems, enables visual verification ofascent vehicle system integrity, and allows forcrew interaction or intervention in anomalytroubleshooting on surface hardware. Beyondannual, comprehensive vehicle checkouts,system activities for the crew will consist ofmaintenance, housekeeping, consumablestracking, and repair operations.
Initial science activities during thesurface phase will concentrate on verifyingcrew health and safety on the martian surface.Atmospheric, chemical, and biological studiesof the immediate environment surroundingthe crew habitat will be critical to ensure crewsafety. Once the immediate environment ischaracterized and potential threats wellunderstood, planning for future local andregional sorties may begin. Some generalplanning of these initial science activities maybe done in advance; however, much of thecrew activity will depend on the initialfindings and therefore cannot be preparedprior to launch. The crew must be providedwith enough expertise and applicablehardware and resources to help them dealwith potential unforeseen discoveries andobstacles to their investigations.
Prior to the first EVA and sortie, roboticexploration may map local areas and allowinvestigators to seek out interesting sites forregional sorties. Mission preparation willhave assumed a minimum number and typeof EVAs; however, adaptation to real-time

3-33
discoveries will be necessary for many ofthese excursions.
Additional biomedical health scienceactivities performed on the crew will berequired during the surface phase as well.Safety issues, health examinations,investigations to gather data on low-gadaptation, and long-term physiologicaleffects on the crew will also be conductedduring the surface phase.
As with other phases of flight, there maybe opportunities for some scientific datareturn which can piggy-back on instrumentsprovided for crew safety issues. For instance,limited solar science may be provided in partfor crew safety issues (as part of solar flaredetection), thus providing opportunity foradditional solar science observations while onthe martian surface.
Training during surface operations willbe periodic to maintain proficiency formission-critical activities (such as launch andEarth return). Additional training activities,on an as needed basis, may be required foractivities such as sorties and EVAs.
Documentation of activities and feedbackon training effectiveness will be required ofall crew members in order to make effectiveuse of the follow-on crew’s training time. Theinformation will provide engineers on Earthwith guidelines for upgrading and improvingthe vehicle systems and training hardware.Additional documentation of scientificexperiments and results will need to berelayed to Earth for use by the science teamsin analysis and future planning.
Time will also be allocated for publicaffairs events. These types of events will notbe interactive due to the time lag, but will berecorded and subsequently transmitted toEarth. Requests from news media and otherorganizations will be reviewed, scheduled,and then relayed to the crew through missionmanagement personnel on Earth. Activitiessuch as these will require a flexible planningarchitecture in which crew and groundsupport both participate.
All of the above mentioned surfaceactivities will require some level ofcommunication with mission teams onEarth—both science and systems teams.Analysis of the communication requirementswill result from a combination of system datarequirements, crew health data requirements,crew personal communications, and sciencedata requirements.
3.4.5.6 Mars Launch Phase
The Mars launch phase is a very dynamicphase of the mission and is defined as theactivities from preparation for launch throughTEI and nonessential hardware powerdown.Many of the activities during this time framewill have been planned in detail prior tolaunch from Earth.
Before committing the crew to Marsascent and Earth return activities, full systemscheckout of the MAV and ERV is required.Because both vehicles are critical to crewsafety and survival, sufficient time must beprovided prior to launch to verify systemsand troubleshoot any anomalous indications

3-34
prior to crew use. Additional crew time willbe spent preparing the surface habitat andother facilities for an untended mode. Suchactivities will include stowing anynonessential hardware, safing critical systemsand their backups, and performing generalhousekeeping duties which will facilitate useof the facilities by future crews.
Once the crew has prepared all surfaceequipment for departure, the actual departureactivities will begin. Detailed activities for thisdeparture will have been prepared andsimulated on Earth, so a detailed plan forMars launch through TEI will be availableand executed at the appropriate time.Contingency scenarios will also have beenplanned prior to Earth launch, and enoughtime will be allocated during ascent andrendezvous activities to enable successfuloperations within these contingencies. Aftersuccessful launch, rendezvous with the returnvehicle, and TEI, the crew will again placenonessential hardware in a quiescent modefor the return trip.
In the time period leading up to the Marslaunch phase, the crew will spend anincreasing amount of time training andpreparing for this extremely critical phase ofthe mission. In particular, the rendezvouswith the ERV will require attention. Sufficienttraining facilities must be available on thesurface to ensure crew proficiency in theseactivities prior to execution. Also,physiological training for the return to a zero-g and eventually a one-g environment will bedramatically increased during prelaunch.
During this most critical of time frames,other activities such as public affairs eventsand documentation of activities will beminimized. Due to the critical nature of thismission phase, communication transmissionsto Earth will be necessary for failureassistance and vehicle health monitoring.However, due to the nature of the lag timeand the criticality of events, vehicle and crewactivities will remain fairly autonomous.
3.4.5.7 Trans-Earth Phase
The trans-Earth phase is defined as thepost-TEI powerdown through preparation forEarth landing. This interplanetary transitphase will be fairly homogeneous from anenvironment and crew activity standpoint.The crew activities related to vehicle systemsare expected to be minimal. Only thoseactivities required for nominal operations willbe required (housekeeping, food preparation,etc.).
Crew training activities during this timeframe will focus on the critical Earth entryand landing phase of flight. This will drive anERV hardware requirement to provide thecrew with adequate simulators and on-boardtraining facilities to maintain proficiency invehicle operations. The crew will also begin aregime of zero-g countermeasure activities(such as exercise, lower body negativepressure, etc., depending on the best availableknowledge at the time) to prepare themselvesphysically for return to a one-g environment.
Again, due to the relatively quiescentsystem activity during the transit phase, time

3-35
may be available for the crew to do limitedscience activities. The restrictions oninterplanetary science activities will be massrelated. Medical testing will be requiredperiodically throughout this phase in order tomeet biomedical science objectives and verifycrew health for entry.
During this time frame, documentationactivity will be extremely important due tothe fact that the next crew will be launchedprior to the return crew’s landing.Additionally, the information will provideengineers on Earth with guidelines forupgrading and improving the vehicle systemsand training hardware. Due to timeconsiderations, some handoverdocumentation for the next crew will havebeen prepared prior to leaving Mars. Finaltransfer of vehicle status is recommended tobe direct from crew to crew to preventconfusion and ensure thoroughness. Someaspects of the hand over may be filteredthrough ground support in order to simplifycommunications requirements.
Due to the high interest in such amission, the crew will be required toparticipate in numerous public affairsactivities. Quiescent periods of transit timecan provide opportunities for press and crewinteraction.
3.4.5.8 Earth Entry and Landing
The Earth entry and landing phase isdefined as the crew activities which supportpreentry preparation through landing andcrew health recovery. Because it is not
currently known how prolonged low-g andzero-g environments will affect the humanphysiology, the main focus of this phase offlight will be the safe return and recovery ofthe crew.
Crew activities related to vehicle systemswill be emphasized prior to entry. Systemcheckout will be required with sufficient timeprior to entry to allow for troubleshootingany failures and guarantee a safe crewlanding. Upon landing, vehicle safing andpowerdown will be required. Due to the highprobability of lower than normal physicalcapability among the crew, many of thepostlanding system activities should beautomated.
No training or science activities will beplanned during this critical phase of flight.Crew health monitoring will be conducted forthe purposes of crew health and safety. Also,due to the time-critical nature of this phase,documentation will be minimal and willpertain only to crew preparedness and systemperformance.
3.4.5.9 Postlanding
The postlanding phase of crewoperations is defined as the activitiesconducted after vehicle powerdown throughmission termination. In most instances,mission termination will not be a well-definedtime and may be different for differentmembers of the crew as crew involvement inadditional program activities is subject tovarious conditions.

3-36
Face-to-face debriefings with theengineers responsible for individual systemsand vehicles will be beneficial after landing.Such meetings can be more productive andprovide more information than writtendocumentation. Feedback on all trainingactivities and facilities throughout the missionwill also be beneficial postlanding as it willfacilitate the training of follow-on crews.
Medical testing after landing willcontinue as part of long-term healthmonitoring. This may be required for anindefinite period of time. Some effects fromthe mission may not appear until months oreven years after the flight phases of themission have ended. Therefore, the crewmembers should be subject to periodicmedical testing for observation of long-termeffects of the mission. It may also be necessaryto satisfy quarantine issues, whether real orpolitical, immediately upon return to Earth.(Quarantine issues will have to be addressedearly in the mission planning phases toensure that adequate facilities are availablewhen and if they are needed.)
Formal documentation of all aspects ofthe mission will be required of all crewmembers after landing. Additional emphasiswill be placed on providing engineers on theground with guidelines for upgrading andimproving vehicle systems and traininghardware.
Due to the high interest in such amission, the crew will be required toparticipate in many public events anddebriefings after they return to Earth.
3.5 Mission Design
The focus of this section is to describe afeasible sequence of flights on specifictrajectories with specific systems thataccomplish Reference Mission goals andobjectives. Foremost among the choices thatmust be made is the type of trajectory to use.It must be one that can accomplish missionobjectives using a reasonable transportationsystem and at the same time address the riskmitigation strategy and still provide forflexibility within a development and flightprogram. Other assumptions made that affectthe “how” of mission implementation arediscussed as part of the overall missionstrategy. With these elements in place, thissection presents a discussion that includessuch information as launch and arrival dates,payload manifests, and crew activities foreach flight in the set studied for this ReferenceMission.
3.5.1 Trajectory Options
Trajectory options between Earth andMars are generally characterized by thelength of time spent in the Mars system andthe total round-trip mission time. The firstoption is typified by short Mars stay-times(typically 30 to 90 days) and relatively shortround-trip mission times (400 to 650 days).This is often referred to as an opposition-classmission, although this report has adopted theterminology “short-stay” mission. Thetrajectory profile for a typical short-staymission is shown in Figure 3-2. This class hashigher propulsive requirements than the often
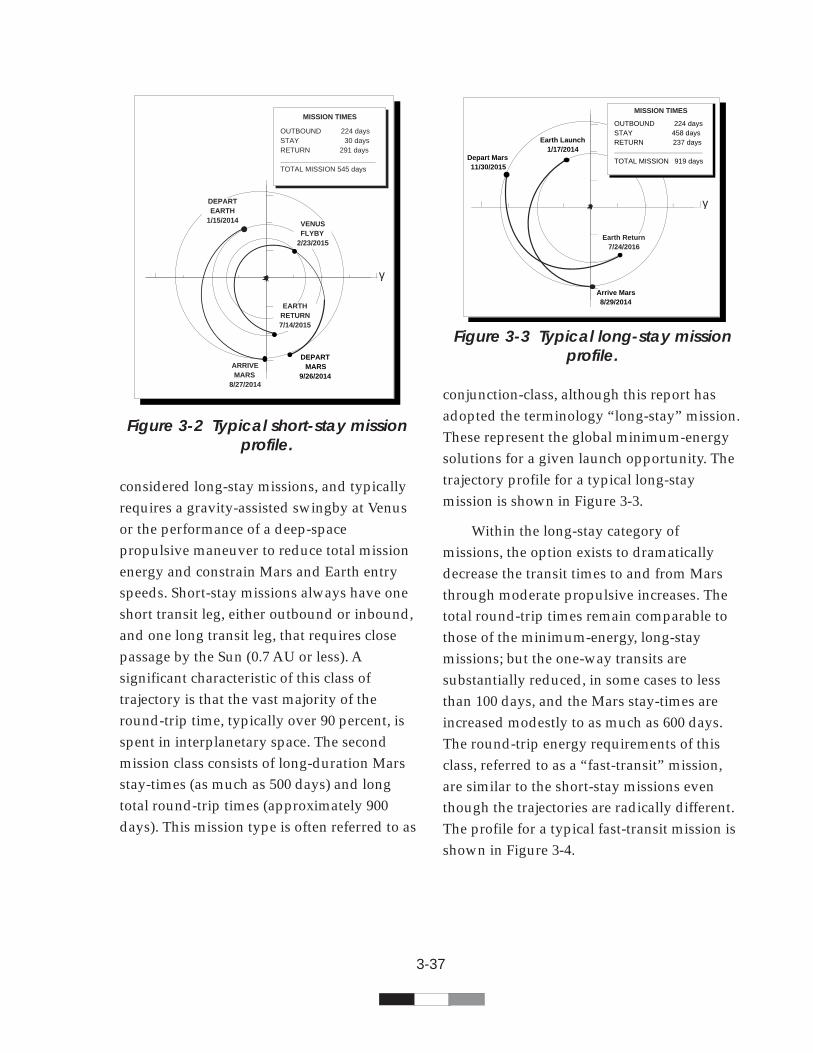
3-37
considered long-stay missions, and typicallyrequires a gravity-assisted swingby at Venusor the performance of a deep-spacepropulsive maneuver to reduce total missionenergy and constrain Mars and Earth entryspeeds. Short-stay missions always have oneshort transit leg, either outbound or inbound,and one long transit leg, that requires closepassage by the Sun (0.7 AU or less). Asignificant characteristic of this class oftrajectory is that the vast majority of theround-trip time, typically over 90 percent, isspent in interplanetary space. The secondmission class consists of long-duration Marsstay-times (as much as 500 days) and longtotal round-trip times (approximately 900days). This mission type is often referred to as
conjunction-class, although this report hasadopted the terminology “long-stay” mission.These represent the global minimum-energysolutions for a given launch opportunity. Thetrajectory profile for a typical long-staymission is shown in Figure 3-3.
Within the long-stay category ofmissions, the option exists to dramaticallydecrease the transit times to and from Marsthrough moderate propulsive increases. Thetotal round-trip times remain comparable tothose of the minimum-energy, long-staymissions; but the one-way transits aresubstantially reduced, in some cases to lessthan 100 days, and the Mars stay-times areincreased modestly to as much as 600 days.The round-trip energy requirements of thisclass, referred to as a “fast-transit” mission,are similar to the short-stay missions eventhough the trajectories are radically different.The profile for a typical fast-transit mission isshown in Figure 3-4.
Figure 3-3 Typical long-stay missionprofile.
γ
MISSION TIMES
OUTBOUND 224 daysSTAY 458 days RETURN 237 days
TOTAL MISSION 919 days
Earth Launch1/17/2014
Depart Mars11/30/2015
Arrive Mars8/29/2014
Earth Return7/24/2016
Figure 3-2 Typical short-stay missionprofile.
γ
DEPART MARS
9/26/2014
EARTH RETURN7/14/2015
ARRIVE MARS
8/27/2014
VENUS FLYBY
2/23/2015
DEPART EARTH
1/15/2014
MISSION TIMES
OUTBOUND 224 daysSTAY 30 days RETURN 291 days
TOTAL MISSION 545 days
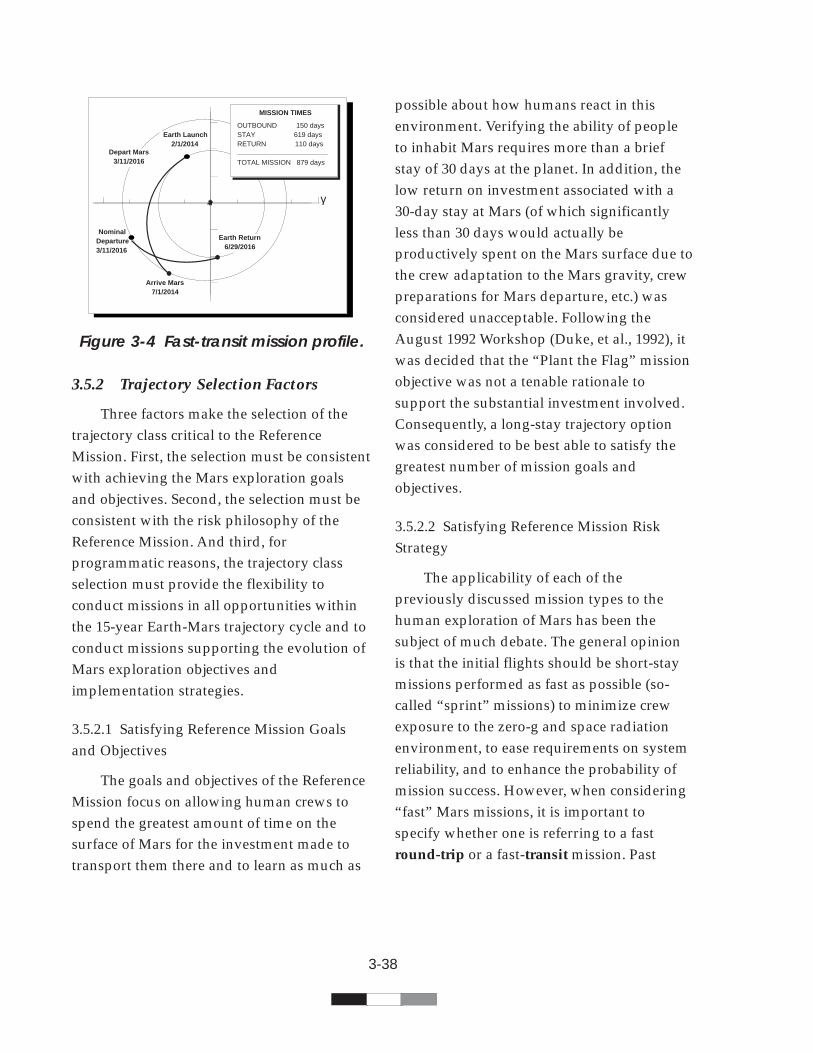
3-38
3.5.2 Trajectory Selection Factors
Three factors make the selection of thetrajectory class critical to the ReferenceMission. First, the selection must be consistentwith achieving the Mars exploration goalsand objectives. Second, the selection must beconsistent with the risk philosophy of theReference Mission. And third, forprogrammatic reasons, the trajectory classselection must provide the flexibility toconduct missions in all opportunities withinthe 15-year Earth-Mars trajectory cycle and toconduct missions supporting the evolution ofMars exploration objectives andimplementation strategies.
3.5.2.1 Satisfying Reference Mission Goalsand Objectives
The goals and objectives of the ReferenceMission focus on allowing human crews tospend the greatest amount of time on thesurface of Mars for the investment made totransport them there and to learn as much as
possible about how humans react in thisenvironment. Verifying the ability of peopleto inhabit Mars requires more than a briefstay of 30 days at the planet. In addition, thelow return on investment associated with a30-day stay at Mars (of which significantlyless than 30 days would actually beproductively spent on the Mars surface due tothe crew adaptation to the Mars gravity, crewpreparations for Mars departure, etc.) wasconsidered unacceptable. Following theAugust 1992 Workshop (Duke, et al., 1992), itwas decided that the “Plant the Flag” missionobjective was not a tenable rationale tosupport the substantial investment involved.Consequently, a long-stay trajectory optionwas considered to be best able to satisfy thegreatest number of mission goals andobjectives.
3.5.2.2 Satisfying Reference Mission RiskStrategy
The applicability of each of thepreviously discussed mission types to thehuman exploration of Mars has been thesubject of much debate. The general opinionis that the initial flights should be short-staymissions performed as fast as possible (so-called “sprint” missions) to minimize crewexposure to the zero-g and space radiationenvironment, to ease requirements on systemreliability, and to enhance the probability ofmission success. However, when considering“fast” Mars missions, it is important tospecify whether one is referring to a fastround-trip or a fast-transit mission. Past
Figure 3-4 Fast-transit mission profile.
γ
Earth Launch2/1/2014
Depart Mars3/11/2016
Arrive Mars7/1/2014
Earth Return6/29/2016
MISSION TIMES
OUTBOUND 150 daysSTAY 619 days RETURN 110 days
TOTAL MISSION 879 days
Nominal Departure3/11/2016

3-39
analyses have shown that decreasing round-trip mission times for the short-stay missionsdoes not equate to fast-transit times (that is,less exposure to the zero-g and spaceradiation environment) as compared to thelong-stay missions. Indeed, fast-transit timesare available only for the long-stay missions.This point becomes clear when looking atFigure 3-5 which graphically displays thetransit times as a function of the total round-trip mission duration. Although the short-staymission has approximately half the totalduration of either of the long-stay missions,over 90 percent of the time is spent in transit,compared to 30 percent for the fast-transitmission.
The interplanetary ionizing radiation ofconcern to mission planners consists of twocomponents: galactic cosmic radiation (GCR)and solar particle events. NASA policyestablishes that exposure of crews to radiationin space shall not result in heath effectsexceeding acceptable risk levels. At present,acceptable risk levels are based on not
exceeding long-term cancer risk by more than3% above the natural cancer death probability(which is approximately 20% lifetime risk forthe US population as a whole). At present,the information required to calculateacceptable risk from radiation exposureduring a Mars mission, especially for theGCR, is not available. Although doses (theaverage physical energy deposition byincident particles) can be calculated, theconversion of this information into apredicted radiation risk cannot be doneaccurately. The National Research Councilrecently issued a report estimating theuncertainty in risk predictions for GCR can beas much as 4-15 times greater than the actualrisk, or as much as 4-15 times smaller.
Current knowledge does allow for somequalitative conclusions to be drawn. Radia-tion risk on the Mars surface, where the GCRfluence is attenuated by 75 percent due to theMars atmosphere and the planet itself, islikely to involve less risk than a comparablelength of exposure in interplanetary space. Ifthe difference in radiation effectivenessbetween the interior of a shielded spacecraftand a habitat on the surface of Mars is notconsidered, the GCR fluence to which crewsare exposed during a 500 plus day transit toMars is equivalent to approximately 125 daysof Mars surface exposure. A significantreduction in transit time, to 100 days for theone-way transit, would result in a radiationexposure comparable to the short-staymission. Thus, the risk to crews on fast-transit missions may be even less than the risk
Return Transit Time at Destination Outbound Transit
0 100 200 300 400 500 600 700 800 900 1000
Short-Stay
Long-Stay (Fast-Transit)
Long-Stay (Minimum Energy)
Mission Duration, Days
Figure 3-5 Round-trip missioncomparisons.

3-40
to crews on short-stay missions, not onlybecause of minimized exposure to GCR butalso reduced probability of exposure to solarparticle events in interplanetary space.
A similar analysis of mission classes isinvolved in considering the crew’s exposureto the zero-g environment during transits toand from Mars. Significant physiologicalchanges occur when zero-g time begins to bemeasured in weeks or months. (Bonedecalcification, immune and cardiovascularsystem degradation, and muscular atrophyare a few of the more unpleasant effects.)Research on the effects of long-term zero-g onthe human body is in an elementary stage. Atthe time of the writing of this report, thelongest continuous stay in space by a U.S.astronaut is the 181 days of Shannon Lucid(aboard the Russian MIR Space Station); thelongest stay by a Russian cosmonaut is 366days. In none of the cases were crews exposedto zero-g/partial-g/zero-g sequences similarto that projected for Mars missions. Currentdata indicates that recovery in a one-genvironment can be fairly rapid (a few days),but development of full productivity couldrequire significantly more time. Upon arrivalon the martian surface, the crew will need tospend some currently unknown, but probablyshort, time re-adapting to a partial-g field.This may be of concern for the short-staymissions where a substantial portion of thesurface stay-time could be consumed by crewadaptation to martian gravity. Conversely,ample time will be available for the crew toregain stamina and productivity during the
long surface stays associated with theminimum-energy, fast-transit missions.
Several potential solutions to thephysiological problems associated with zero-gtransits to and from Mars may exist:countermeasures (exercise, body fluidmanagement, lower body negative pressure),artificial-g spacecraft, and reduced transittimes.
The usefulness of countermeasures toreduce some of the zero-g effects is stillunknown. Russian long-duration crews haveexperienced physiological degradation evenwhen rigorous exercise regimens have beenfollowed. However, most of these effects seemto be quickly ameliorated upon return to aone-g environment, at least when immediatemedical aid is available.
Rotating the Mars transfer vehicle (MTV)and ERV is a method of providing anartificial-g environment for the crew and ismost often associated with low-performancepropulsion systems, or the short-stay class oftrajectories (since both require long transittimes). Studies have indicated that the MTVdesign mass penalties are on the order of 5percent to 20 percent if artificial g isincorporated. Depending on the specificconfiguration, there may also be operationalcomplications associated with artificial-gspacecraft including EVA, maintenance, andthe spin-up/spin-down required formidcourse maneuvering and rendezvous anddocking.
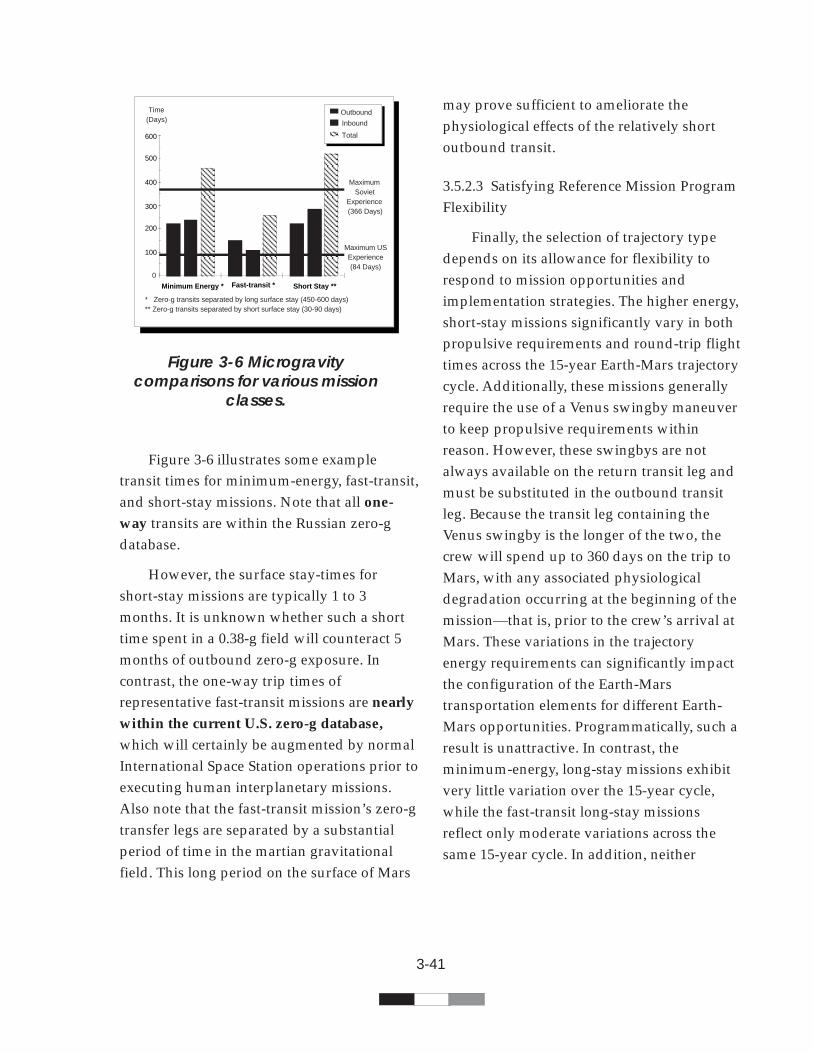
3-41
Figure 3-6 illustrates some exampletransit times for minimum-energy, fast-transit,and short-stay missions. Note that all one-way transits are within the Russian zero-gdatabase.
However, the surface stay-times forshort-stay missions are typically 1 to 3months. It is unknown whether such a shorttime spent in a 0.38-g field will counteract 5months of outbound zero-g exposure. Incontrast, the one-way trip times ofrepresentative fast-transit missions are nearlywithin the current U.S. zero-g database,which will certainly be augmented by normalInternational Space Station operations prior toexecuting human interplanetary missions.Also note that the fast-transit mission’s zero-gtransfer legs are separated by a substantialperiod of time in the martian gravitationalfield. This long period on the surface of Mars
may prove sufficient to ameliorate thephysiological effects of the relatively shortoutbound transit.
3.5.2.3 Satisfying Reference Mission ProgramFlexibility
Finally, the selection of trajectory typedepends on its allowance for flexibility torespond to mission opportunities andimplementation strategies. The higher energy,short-stay missions significantly vary in bothpropulsive requirements and round-trip flighttimes across the 15-year Earth-Mars trajectorycycle. Additionally, these missions generallyrequire the use of a Venus swingby maneuverto keep propulsive requirements withinreason. However, these swingbys are notalways available on the return transit leg andmust be substituted in the outbound transitleg. Because the transit leg containing theVenus swingby is the longer of the two, thecrew will spend up to 360 days on the trip toMars, with any associated physiologicaldegradation occurring at the beginning of themission—that is, prior to the crew’s arrival atMars. These variations in the trajectoryenergy requirements can significantly impactthe configuration of the Earth-Marstransportation elements for different Earth-Mars opportunities. Programmatically, such aresult is unattractive. In contrast, theminimum-energy, long-stay missions exhibitvery little variation over the 15-year cycle,while the fast-transit long-stay missionsreflect only moderate variations across thesame 15-year cycle. In addition, neither
Figure 3-6 Microgravitycomparisons for various mission
classes.
0
100
200
300
400
500
600
Minimum Energy * Fast-transit * Short Stay **
Outbound
Inbound
Total
Time(Days)
Maximum Soviet
Experience (366 Days)
* Zero-g transits separated by long surface stay (450-600 days)** Zero-g transits separated by short surface stay (30-90 days)
Maximum USExperience (84 Days)
3-42
mission requires a Venus swingby or travelinside the Earth’s orbit around the Sun.
3.5.3 Mission Design Strategy
Keeping the Reference Mission goals andobjectives in mind, numerous alternativeswere considered that could successfullyaccomplish the basic mission. Two majorconsiderations that drove many of themission design-related selections include:
•Reducing the amount of propellantneeded to move mission hardware fromone location to another (propellant massis the single largest element of allcomponents in the Reference Mission)
•Extending the amount of time spent bythe crew conducting usefulinvestigations on the surface of Mars.
The alternatives selected by the MarsStudy Team that impact mission designstrategy have been grouped into six majorareas and are presented here. Otheralternatives will be discussed in subsequentsections.
3.5.3.1 Trajectory Type
The discussion presented in the previoussection led to the selection of the fast-transit,long-stay class trajectories. However, theamount of reduction sought in the Earth-Marsand Mars-Earth transit times must bebalanced with other considerations.Reductions below 180 days in the one-waytransit times (for the 2009 opportunity, theworst case) would require either significant
propulsive capability improvements or wouldnecessitate much larger interplanetaryspacecraft launched into LEO for the humanmissions, thereby requiring assembly anddocking in LEO and higher ETO launch rates.Indeed, others have demonstrated thatreductions in trip times reach a point ofdiminishing returns from the space transfervehicle design perspective (Drake, 1991).Thus, a C3 leaving Earth of 20 to 25 km2/sec2
appears to be appropriate for humanmissions. This results in maximum Earth-Mars transit times of approximately 180 days(2009 opportunity) and minimum transittimes of approximately 120 days (for the 2018opportunity, the best case). Similarly, a C3leaving Mars of ~16 km2/sec2 appears to beappropriate for human missions, resulting insimilar Mars-Earth transfer times for theseopportunities. (C3 is a measure of the energyrequired to get from Earth to Mars or viceversa. Specifically, C3 is the square of thevelocity of departure from a planet. Low C3sare desirable because there is a directcorrelation between C3 and the size of thetransportation system.)
3.5.3.2 Split Mission Strategy
The split mission approach has beenadopted for the Reference Mission because itallows mission elements to be broken intomanageable pieces rather than trying tointegrate all necessary hardware elements fora single, massive launch. For this mission,“manageable” was defined to mean piecesthat can be launched directly from Earth andsent to Mars, using launch vehicles of the

3-43
Saturn V or Energia class, withoutrendezvous or assembly in LEO. A keyattribute of the split mission strategy is that itallows cargo to be sent to Mars without acrew, during the same launch opportunity oreven one or more opportunities prior to thecrew’s departure. This creates a situationwhere cargo can be transferred on low energy,longer transit time trajectory, and only thecrews must be sent on a high-energy, fast-transit trajectory. By using a low energytransfer, the same transportation system candeliver more payload to the surface of Mars atthe expense of longer flight times. Spacing thelaunches needed to support a mission acrosstwo launch windows allows much of theinfrastructure to be pre-positioned andchecked out prior to committing crews totheir mission. When combined with thedecision to focus all Mars surfaceinfrastructure at a single site, this approachallows for an improved capability toovercome uncertainties and outright failuresencountered by the crews. Launches ofduplicate hardware elements, such as ERVs,on subsequent missions provides eitherbackup for the earlier launches or growth ofcapability on the surface.
3.5.3.3 Aerocapture
Mars orbit capture and the majority ofthe Mars descent maneuver will be performedusing a single biconic aeroshell. The decisionto perform the Mars orbit capture maneuveraerodynamically was based on the fact that anaeroshell will be required to perform the Marsdescent maneuver no matter what method is
used to capture into orbit about Mars, andcurrent technology can develop an aeroshellwith a mass that is equal to or less than thepropulsion system required for capture. Thus,the strategy assumed the development of asingle aeroshell that can be used for bothMars orbit capture and descent maneuvers.Given the demands on a descent aeroshell ofthe Mars entry and landing requirements, theadditional capability to permit aerocapture isconsidered modest.
3.5.3.4 Surface Rendezvous
The hardware elements launched as partof the split mission approach must cometogether on the surface of Mars, which willrequire both accurate landing and mobility ofmajor elements on the surface to allow themto be connected or moved into closeproximity. The alternative was to link majorcomponents either in Earth orbit or in Marsorbit prior to entry and landing. Previousstudies (NASA, 1989) indicated that the heatshields for vehicles with the combined massimplied by such an orbital rendezvousapproach would be exceedingly large anddifficult to launch and assemble in orbit.Precision landing has been demonstrated forthe Moon (Apollo 12), and studies indicate(Barton, et al., 1994) that available guidanceand control systems combined with a simplebeacon transmitting from the surface(assumed to be carried by the first element atthe site) are sufficient to allow a vehicle toland at a designated location on Mars withuncertainties measured in meters.

3-44
3.5.3.5 Use of Indigenous Resources
The highly automated production ofpropellant from martian resources is anotherdefining attribute of the Reference Mission.The hardware necessary to produce and storepropellants using raw materials available onMars (in this case, carbon dioxide from theatmosphere) is less massive than thepropellant needed to depart the martiansurface for orbit (Ash, et al., 1978). It is nowapparent that the technology for producingmethane and liquid oxygen from the martianatmosphere and some nominal hydrogenfeedstock from Earth is not only an effectiveperformance enhancement but also appears tobe technologically feasible within the next fewyears. Splitting the launch of missionelements allows the propellant productioncapability to be emplaced, checked out, andoperated prior to committing the crew tolaunch from Earth. In addition to spacecraftpropulsion, this production capability onMars can provide fuel for surfacetransportation, reactants for fuel cells, andbackup caches of consumables (water,oxygen, and trace gases) for the life supportsystem. All of these features allow for smalleramounts of consumable material to belaunched from Earth and contributes to thegoal of learning how to live on Mars.
3.5.3.6 Mars Orbit Rendezvous and DirectEntry at Earth
The last element of mission design isreturning the crew to Earth. There arepotentially three significant propulsive
maneuvers associated with the return:departing from the martian surface, departingfrom Mars orbit, and capturing into Earthorbit. Several alternatives are associated withthese three events, the proper selection ofwhich can result in a significant savings inpropellant and thus in mass that must belaunched from Earth. Three key choicesaffecting this portion of the mission are madein the Reference Mission. First, the Earth-return transit habitat used by the crew is leftin Mars orbit. While the outbound habitatcould have been used for this task, thepropellant needed to lift it is significant; andit is considered more valuable as part of agrowing surface infrastructure. The entireERV is composed of the TEI stage and theEarth-return transit habitat. The ERV isdelivered to Mars orbit fully fueled, and itloiters there for nearly 4 years before beingused by the crew in returning to Earth.Second, the crew is not captured into an Earthorbit at the completion of the mission, butdescends directly to the surface much as theApollo astronauts did when returning fromthe Moon. The Earth crew capture vehicle(ECCV) has the necessary heat shield forEarth reentry. Third, the crew rides into Marsorbit in a dedicated ascent capsule.
3.5.4 Mission Sequence
Figure 3-7 illustrates the missionsequence analyzed for the Reference Mission.In this sequence, three vehicles will belaunched from Earth to Mars in each of fourlaunch opportunities starting in 2007. The
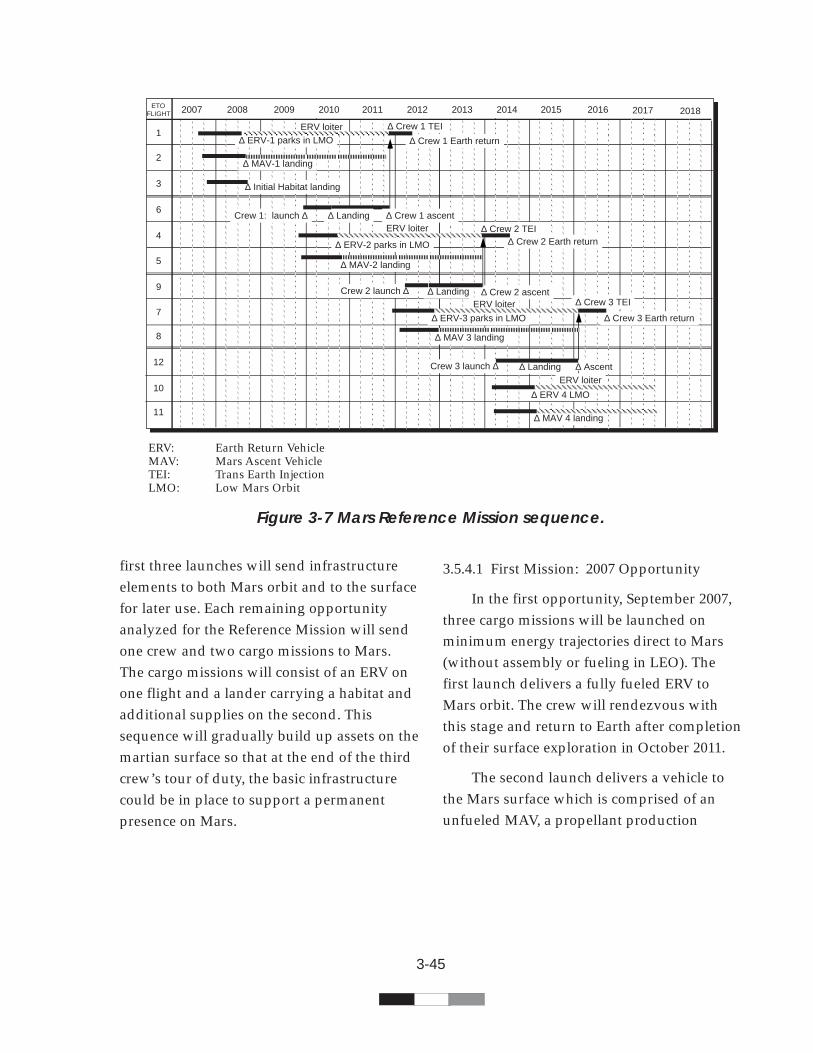
3-45
first three launches will send infrastructureelements to both Mars orbit and to the surfacefor later use. Each remaining opportunityanalyzed for the Reference Mission will sendone crew and two cargo missions to Mars.The cargo missions will consist of an ERV onone flight and a lander carrying a habitat andadditional supplies on the second. Thissequence will gradually build up assets on themartian surface so that at the end of the thirdcrew’s tour of duty, the basic infrastructurecould be in place to support a permanentpresence on Mars.
3.5.4.1 First Mission: 2007 Opportunity
In the first opportunity, September 2007,three cargo missions will be launched onminimum energy trajectories direct to Mars(without assembly or fueling in LEO). Thefirst launch delivers a fully fueled ERV toMars orbit. The crew will rendezvous withthis stage and return to Earth after completionof their surface exploration in October 2011.
The second launch delivers a vehicle tothe Mars surface which is comprised of anunfueled MAV, a propellant production
Figure 3-7 Mars Reference Mission sequence.
1
2
3
6
4
5
9
7
8
12
10
ETOFLIGHT 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016
∆ MAV-1 landing
∆ Initial Habitat landing
∆ ERV-1 parks in LMO
∆ Crew 1 ascent
∆ Crew 1 TEI
∆ Crew 1 Earth return
ERV loiter
ERV loiter
ERV loiter
∆ ERV-2 parks in LMO
∆ MAV-2 landing
∆ MAV 3 landing
Crew 1: launch ∆ ∆ Landing
Crew 2 launch ∆
Crew 3 launch ∆
∆ Landing
∆ Landing
∆ ERV-3 parks in LMO
∆ Crew 2 TEI∆ Crew 2 Earth return
∆ MAV 4 landing
∆ Ascent
∆ Crew 2 ascent
∆ ERV 4 LMO
2017
∆ Crew 3 TEI
2018
∆ Crew 3 Earth return
ERV loiter
11
ERV: Earth Return VehicleMAV: Mars Ascent VehicleTEI: Trans Earth InjectionLMO: Low Mars Orbit
3-46
module, a nuclear power plant, liquidhydrogen (to be used as a reactant to producethe ascent vehicle propellant), andapproximately 40 tonnes of additionalpayload to the surface. After this vehiclelands on the surface in late August 2008, thenuclear reactor will be autonomouslydeployed approximately 1 kilometer from theascent vehicle, and the propellant productionfacility (using hydrogen brought from Earthand carbon dioxide from the Marsatmosphere) will begin to produce the nearly30 tonnes of oxygen and methane that will berequired to launch the crew to Mars orbit inOctober 2011. This production will becompleted within approximately 1 year—several months before the first crew’sscheduled departure from Earth in mid-November 2009.
The third launch in the 2007 opportunitywill deliver a second lander to the Marssurface; it will be comprised of a surfacehabitat/laboratory, nonperishableconsumables for a safe haven, and a secondnuclear power plant. It will descend to thesurface in early September 2008 and land nearthe first vehicle. The second nuclear powerplant will be autonomously deployed nearthe first plant. Each plant will providesufficient power (160 kWe) for the entiremature surface outpost, thereby providingcomplete redundancy within the powerfunction. The outpost laboratory will includetools, spare parts, and teleoperated rovers tosupport scientific exploration and willprovide geological and biological analyses.
Table 3-3 lists the various payload itemsdeployed to the surface during the firstopportunity. And Figure 3-8 illustrates thesurface outpost configuration afterdeployment of payloads from the first twocargo landers.
3.5.4.2 Second Mission: First Flight Crew,2009 Opportunity
In the second opportunity, opening inOctober 2009, two additional cargo missionsand the first crew mission will be launched.Before either the crew or additional cargomissions are launched from Earth in 2009, allassets previously delivered to Mars arechecked out and the MAV launched in 2007 isverified to be fully fueled. Should anyelement of the surface system required forcrew safety or critical for mission success notcheck out adequately, the surface systems willbe placed in standby mode and the crewmission delayed until the systems can bereplaced or their functions restored. Some ofthe systems can be replaced using hardwareoriginally intended for subsequent missionsand which would have otherwise providedsystem enhancement; others may befunctionally replaced by other systems.
Table 3-4 lists the manifested payloadsfor launch in the 2009 opportunity.
The first cargo launch in October 2009 is aduplicate of the first launch from the 2007opportunity, delivering a fully fueled Earth-return stage to Mars orbit. The second cargolaunch similarly mirrors the second launch ofthe 2007 opportunity, delivering a second
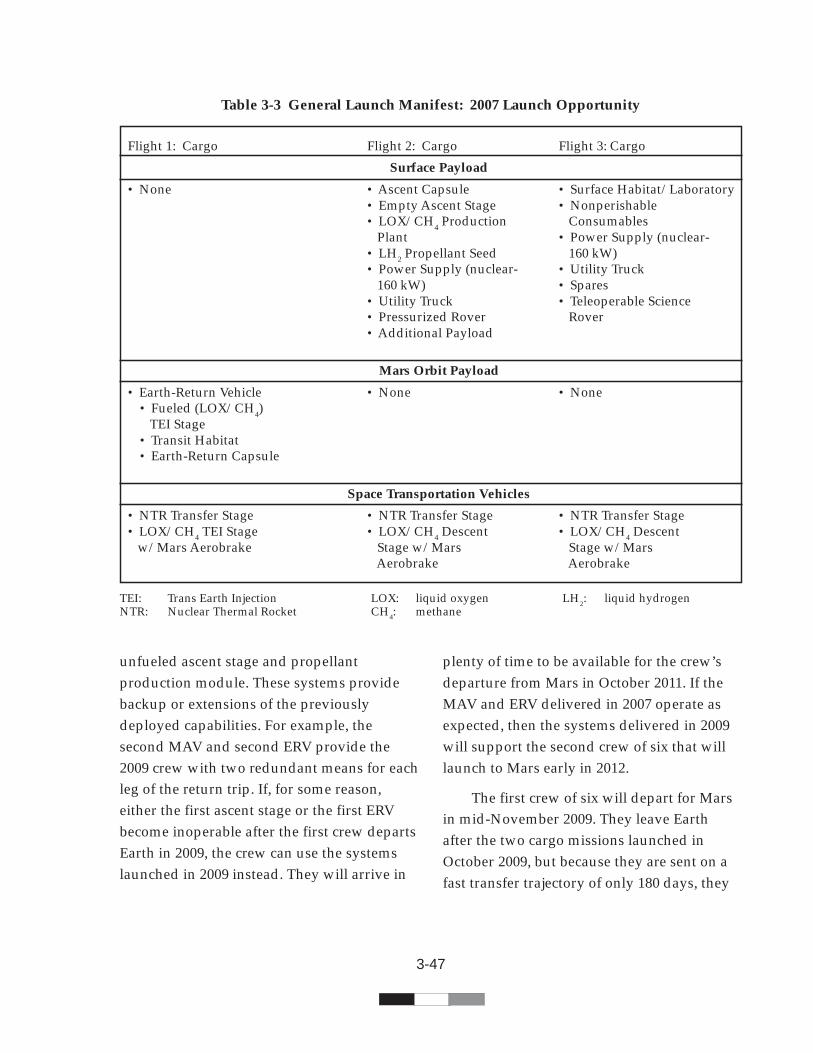
3-47
unfueled ascent stage and propellantproduction module. These systems providebackup or extensions of the previouslydeployed capabilities. For example, thesecond MAV and second ERV provide the2009 crew with two redundant means for eachleg of the return trip. If, for some reason,either the first ascent stage or the first ERVbecome inoperable after the first crew departsEarth in 2009, the crew can use the systemslaunched in 2009 instead. They will arrive in
plenty of time to be available for the crew’sdeparture from Mars in October 2011. If theMAV and ERV delivered in 2007 operate asexpected, then the systems delivered in 2009will support the second crew of six that willlaunch to Mars early in 2012.
The first crew of six will depart for Marsin mid-November 2009. They leave Earthafter the two cargo missions launched inOctober 2009, but because they are sent on afast transfer trajectory of only 180 days, they
Table 3-3 General Launch Manifest: 2007 Launch Opportunity
Flight 1: Cargo Flight 2: Cargo Flight 3: Cargo
Surface Payload
• None • Ascent Capsule • Surface Habitat/Laboratory• Empty Ascent Stage • Nonperishable• LOX/CH4 Production Consumables Plant • Power Supply (nuclear-• LH2 Propellant Seed 160 kW)• Power Supply (nuclear- • Utility Truck 160 kW) • Spares• Utility Truck • Teleoperable Science• Pressurized Rover Rover• Additional Payload
Mars Orbit Payload
• Earth-Return Vehicle • None • None• Fueled (LOX/CH4) TEI Stage• Transit Habitat• Earth-Return Capsule
Space Transportation Vehicles
• NTR Transfer Stage • NTR Transfer Stage • NTR Transfer Stage• LOX/CH4 TEI Stage • LOX/CH4 Descent • LOX/CH4 Descent w/Mars Aerobrake Stage w/Mars Stage w/Mars
Aerobrake Aerobrake
TEI: Trans Earth Injection LOX: liquid oxygen LH2: liquid hydrogenNTR: Nuclear Thermal Rocket CH4: methane
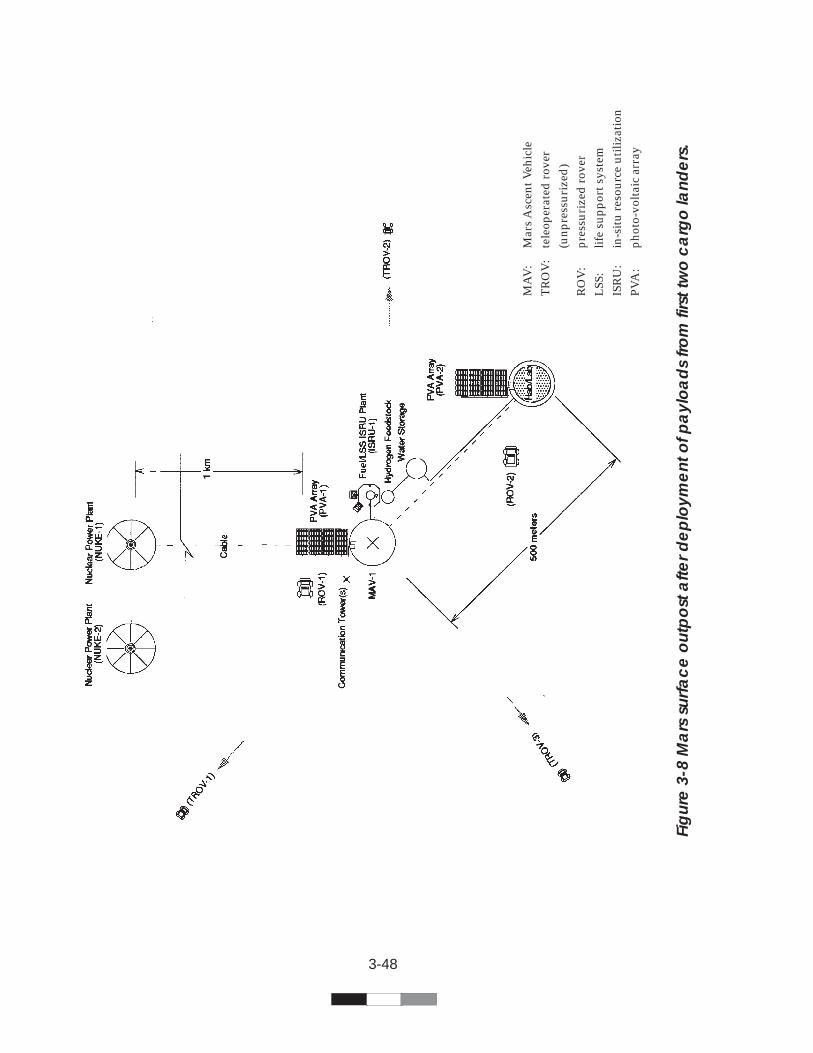
3-48
Fig
ure
3-8
Ma
rs s
urfa
ce
out
po
st a
fter d
ep
loym
ent
of p
ayl
oa
ds
from
firs
t tw
o c
arg
o la
nde
rs.
MA
V:
Mar
s A
scen
t Veh
icle
TR
OV
:te
leop
erat
ed r
over
(unp
ress
uriz
ed)
RO
V:
pres
suri
zed
rov
erL
SS:
life
supp
ort s
yste
mIS
RU
:in
-sit
u re
sour
ce u
tiliz
atio
nPV
A:
phot
o-vo
ltai
c ar
ray
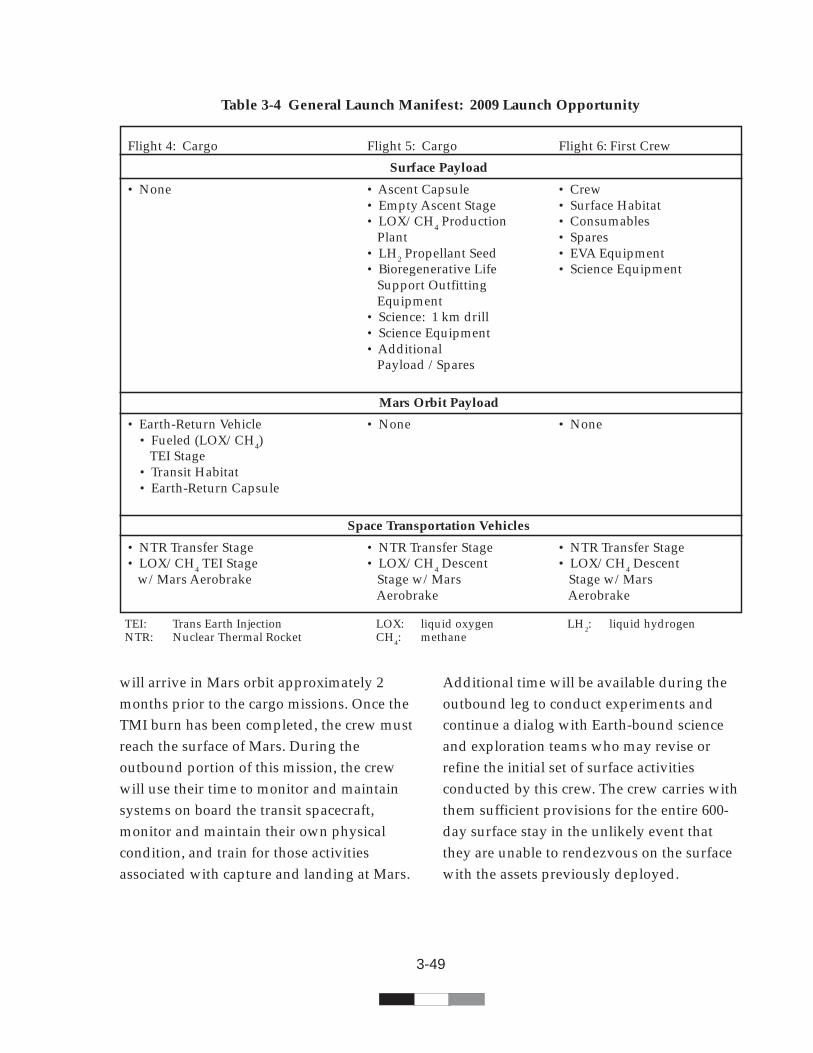
3-49
will arrive in Mars orbit approximately 2months prior to the cargo missions. Once theTMI burn has been completed, the crew mustreach the surface of Mars. During theoutbound portion of this mission, the crewwill use their time to monitor and maintainsystems on board the transit spacecraft,monitor and maintain their own physicalcondition, and train for those activitiesassociated with capture and landing at Mars.
Additional time will be available during theoutbound leg to conduct experiments andcontinue a dialog with Earth-bound scienceand exploration teams who may revise orrefine the initial set of surface activitiesconducted by this crew. The crew carries withthem sufficient provisions for the entire 600-day surface stay in the unlikely event thatthey are unable to rendezvous on the surfacewith the assets previously deployed.
Table 3-4 General Launch Manifest: 2009 Launch Opportunity
Flight 4: Cargo Flight 5: Cargo Flight 6: First Crew
Surface Payload
• None • Ascent Capsule • Crew• Empty Ascent Stage • Surface Habitat• LOX/CH4 Production • Consumables Plant • Spares• LH2 Propellant Seed • EVA Equipment• Bioregenerative Life • Science Equipment Support Outfitting Equipment• Science: 1 km drill• Science Equipment• Additional Payload /Spares
Mars Orbit Payload
• Earth-Return Vehicle • None • None• Fueled (LOX/CH4) TEI Stage• Transit Habitat• Earth-Return Capsule
Space Transportation Vehicles
• NTR Transfer Stage • NTR Transfer Stage • NTR Transfer Stage• LOX/CH4 TEI Stage • LOX/CH4 Descent • LOX/CH4 Descent w/Mars Aerobrake Stage w/Mars Stage w/Mars
Aerobrake Aerobrake
TEI: Trans Earth Injection LOX: liquid oxygen LH2: liquid hydrogenNTR: Nuclear Thermal Rocket CH4: methane
3-50
The crew will land on Mars in a surfacehabitat almost identical to the habitat/laboratory previously deployed to the Marssurface. The transit habitat sits atop a descentstage identical to those used in the 2007opportunity. After capturing into a highlyelliptic Mars orbit (250 by 33793 km), the crewdescends in the transit habitat to rendezvouson the surface with the other elements of thesurface outpost. There is no requiredrendezvous in Mars orbit prior to the crewdescent. This is consistent with the riskphilosophy assumed for the ReferenceMission.
Figure 3-9 illustrates the surface outpostconfiguration at the end of the first crew's stay.
Surface exploration activity will consistof diverse observations by robotic vehiclesand human explorers, the collection ofsamples and their examination in the outpostlaboratory, and experiments designed togauge the ability of humans to inhabit Mars.Table 3-5 lists a representative set of scienceand exploration equipment that will bedelivered as part of the cargo on Flight 5.These payloads are simply examples; theselection of specific experimental capabilitywill depend on the requirements of martianscience at the time that the missions aredefined in detail. There is also a categorylisted for “discretionary principal investigator(PI) science.” This category of experimentalequipment will be allocated to investigatorswho have competed through a proposal andpeer review process and are selected for oneof these flights. This allows a wider range of
investigations and participants in theexploration of Mars.
Prior to the arrival of the first humancrew, teleoperated rovers (TROV) may bedelivered to the surface. When the crewarrives, these rovers will be available forteleoperation by the crew. It is also possiblefor the rovers to be operated in a supervisedmode from Earth. If used in this mode, theTROVs may be designed to provide globalaccess and may be able to return samples tothe outpost from hundreds of kilometersdistance from the site if they are deployedwith the first set of cargo missions launchedmore than 2 years before the crew arrives.
As experience grows, the range of humanexploration will grow from the local to theregional. Regional expeditions lastingperhaps 2 weeks, using mobile facilities, maybe conducted at intervals of a few months.Between these explorations, analysis in thelaboratory will continue. Figure 3-10 (Cohen,1993) provides a possible surface missiontimeline for the first 600-day mission.
The deployment of a bioregenerative lifesupport capability will be an early activityfollowing crew landing. This bioregenerativesystem is not required to maintain the healthand vitality of the crew; however, it willimprove the robustness of the life supportsystem and is important to the earlyobjectives of the outpost.
The first crew will stay at the outpostfrom 16 to 18 months. Part of their duties willbe to prepare the outpost site for the receipt of
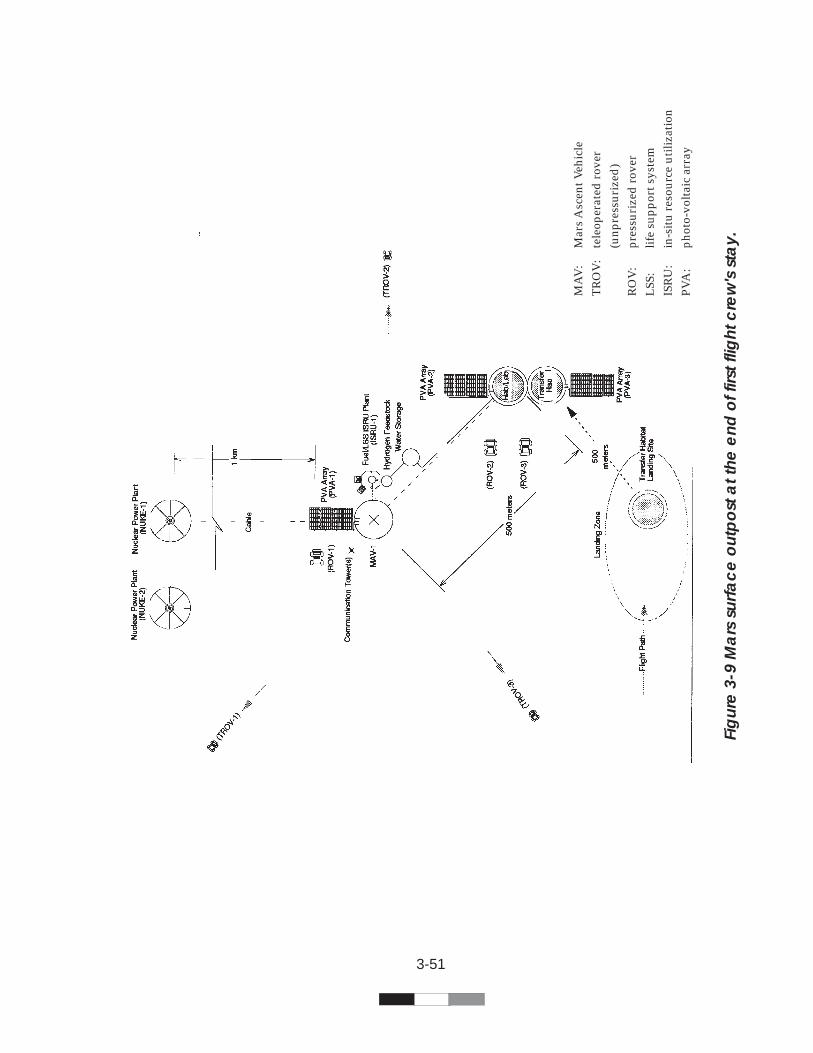
3-51
Fig
ure
3-9
Ma
rs s
urfa
ce
out
po
st a
t the
end
of f
irst f
light
cre
w's
sta
y.
MA
V:
Mar
s A
scen
t Veh
icle
TR
OV
:te
leop
erat
ed r
over
(unp
ress
uriz
ed)
RO
V:
pres
suri
zed
rov
erL
SS:
life
supp
ort s
yste
mIS
RU
:in
-sit
u re
sour
ce u
tiliz
atio
nPV
A:
phot
o-vo
ltai
c ar
ray

3-52
additional elements launched on subsequentmission opportunities. Systems associatedwith the ascent vehicle, although monitoredduring the entire stay on the surface, will bechecked and, if necessary, tested in detail toensure that they will operate satisfactorily.The surface crew will also spend increasingamounts of time rehearsing the launch andrendezvous phase of the Mars departure tosharpen necessary skills that have not beenused in over 2 years. Because the first crewwill have to depart before the second crewarrives, surface systems will have to be instandby mode for approximately 10 months.
After their stay on Mars, the crew usesone of the previously landed ascent vehiclesto return to orbit, rendezvous with the ERV,and return to Earth. Like the outbound transitleg, the crew rides in a habitat on the inboundtransit leg. This habitat is part of the Earth-return stage deployed in a previousopportunity by one of the cargo flights and
typically has been in an untended mode fornearly 4 years prior to the crew’s arrival.
During the return portion of the mission,the crew will again spend a significantportion of their time monitoring andmaintaining systems on board the transitspacecraft, monitoring and maintaining theirphysical condition, and training for theactivities associated with Earth return. Asmentioned previously, the second crew willbe in transit to Mars during a portion of thefirst crew’s return to Earth. This implies that adebriefing of the first crew, to gain insightfrom lessons learned and suggestions forfuture surface activities, will begin during thisreturn phase. This debriefing will be relayedto the outbound crew so that they canparticipate in the interaction with thereturning crew and modify their plans to takeadvantage of the first crew’s experience.
On landing, the first crew and theirreturned samples will be placed in quarantine
Table 3-5 Surface Science Payload for First Flight Crew
Payload Description Payload Mass (kg)Field Geology Package: geologic hand tools, cameras, 335 sample containers, documentation toolsGeoscience lab instruments: microscopes, 125 geochemical analysis equipment, cameraExobiology laboratory: enclosures, microscopes, 50 culture mediaBiomedical/bioscience lab 500Traverse geophysics instruments 400Geophysics/meteorology instruments (8 sets) 20010-meter drill 260Meteorology balloons 200Discretionary PI science 300Total 2370
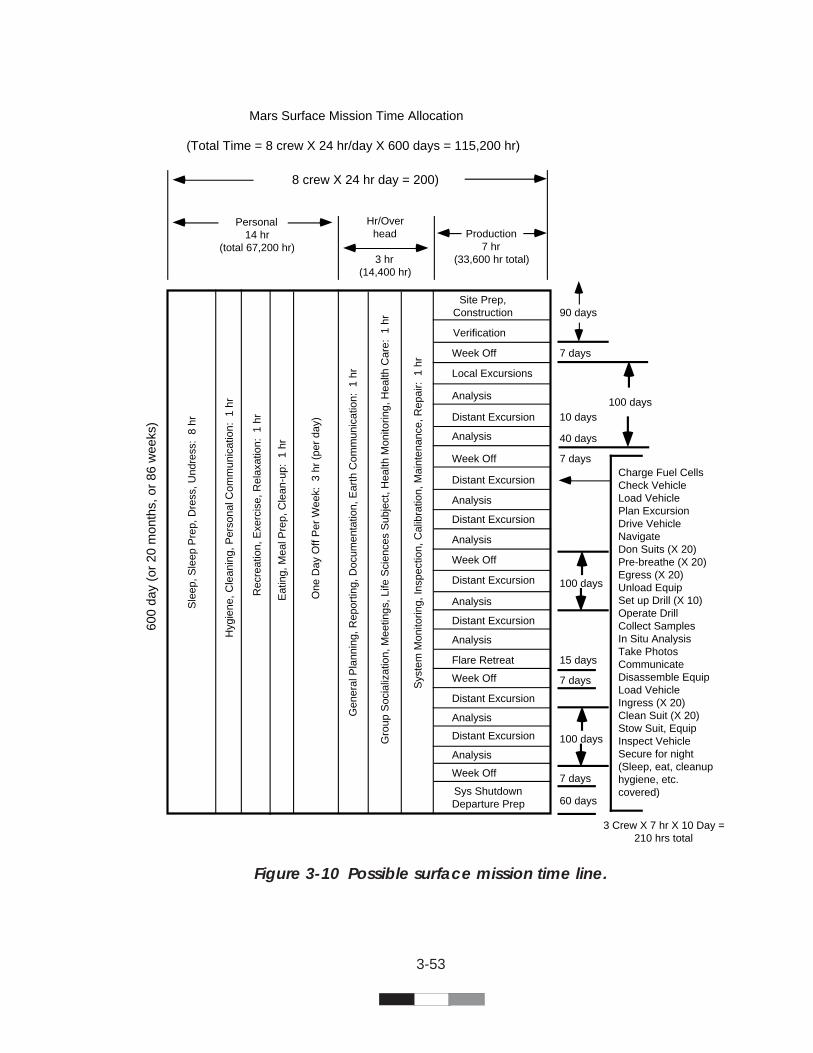
3-53
Figure 3-10 Possible surface mission time line.
Mars Surface Mission Time Allocation
(Total Time = 8 crew X 24 hr/day X 600 days = 115,200 hr)
8 crew X 24 hr day = 200)
Charge Fuel CellsCheck VehicleLoad VehiclePlan ExcursionDrive VehicleNavigateDon Suits (X 20)Pre-breathe (X 20)Egress (X 20)Unload EquipSet up Drill (X 10)Operate DrillCollect SamplesIn Situ AnalysisTake PhotosCommunicateDisassemble EquipLoad VehicleIngress (X 20)Clean Suit (X 20)Stow Suit, EquipInspect VehicleSecure for night(Sleep, eat, cleanuphygiene, etc.covered)
3 Crew X 7 hr X 10 Day =210 hrs total
600
day
(or
20 m
onth
s, o
r 86
wee
ks)
Sle
ep, S
leep
Pre
p, D
ress
, Und
ress
: 8
hr
Hyg
iene
, Cle
anin
g, P
erso
nal C
omm
unic
atio
n: 1
hr
Rec
reat
ion,
Exe
rcis
e, R
elax
atio
n: 1
hr
Eat
ing,
Mea
l Pre
p, C
lean
-up:
1 h
r
One
Day
Off
Per
Wee
k: 3
hr
(per
day
)
Gen
eral
Pla
nnin
g, R
epor
ting,
Doc
umen
tatio
n, E
arth
Com
mun
icat
ion:
1 h
r
Gro
up S
ocia
lizat
ion,
Mee
tings
, Life
Sci
ence
s S
ubje
ct, H
ealth
Mon
itorin
g, H
ealth
Car
e: 1
hr
Sys
tem
Mon
itorin
g, In
spec
tion,
Cal
ibra
tion,
Mai
nten
ance
, Rep
air:
1 h
r
Site Prep,Construction
Verification
Week Off
Local Excursions
Analysis
Distant Excursion
Analysis
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Flare Retreat
Week Off
Distant Excursion
Analysis
Distant Excursion
Analysis
Week Off
Sys ShutdownDeparture Prep
Personal14 hr
(total 67,200 hr)
Hr/Overhead
3 hr(14,400 hr)
Production7 hr
(33,600 hr total)
90 days
7 days
100 days10 days
40 days
7 days
100 days
15 days
7 days
7 days
100 days
60 days

3-54
Figure 3-11 illustrates the surface outpostconfiguration at the end of the second crew'sstay.
As before, the second crew will continuewith the general type of activities conductedby the first crew: diverse observations byrobotic vehicles and human explorers,collection of samples and their examination inthe outpost laboratory, and experimentsdesigned to gauge the ability of humans toinhabit Mars. Specific crew activities willbuild on the lessons learned and questionsgenerated by the first crew. Table 3-7 lists arepresentative set of science and explorationequipment that will be delivered as part ofthe cargo on Flight 8. Note in particular thatthis manifest contains a drill designed toreach depths of 1 kilometer. (The deep drillingoperation must be consistent with planetaryprotection protocols.) This tool will be used togather subsurface core samples that will helpreconstruct the geologic history of Mars, andto try to locate subsurface deposits of water ineither liquid or solid form. Such a discoverywill substantially enhance the habitabilityprospects for future crews by possiblyupgrading propulsion systems to the use ofhydrogen and oxygen and expandingagricultural activities.
The second crew will repeat the activitiesof the first crew in preparing themselves, theascent vehicle, and the surface habitat for adeparture from Mars during December 2013.The third crew will already be in transit to
in accordance with the protocols in effect atthe time. The crew’s re-adaptation to a 1-genvironment will be monitored in detail tolearn more about how the human bodyadapts to the varying gravity conditions andto better prepare for the return of subsequentcrews.
3.5.4.3 Third Mission: Second Flight Crew,2011 Opportunity
In the third opportunity opening inDecember 2011, two additional cargomissions and the second crew mission will belaunched. As in the second opportunity, allassets previously delivered to Mars arechecked out and the MAV is verified to befully fueled. Any non-mission-criticalmaintenance items identified by the first crewor items noted prior to the departure ofFlights 7 through 9 are added to the sparesmanifest and delivered with other surfaceequipment. Table 3-6 lists the manifestedpayloads for launch in the 2011 opportunity.
Prior to the arrival of the second crew, theISRU plants are producing not only thepropellants needed for the ascent vehicle, butalso water, oxygen, and buffer gases to serveas an emergency cache for the life supportsystem. Teleoperated rovers are deployed onextended traverses, perhaps to distances ofmore than 100 kilometers, to take measure-ments, gather samples, and reconnoiter sitesfor the human crew to investigate in moredetail.
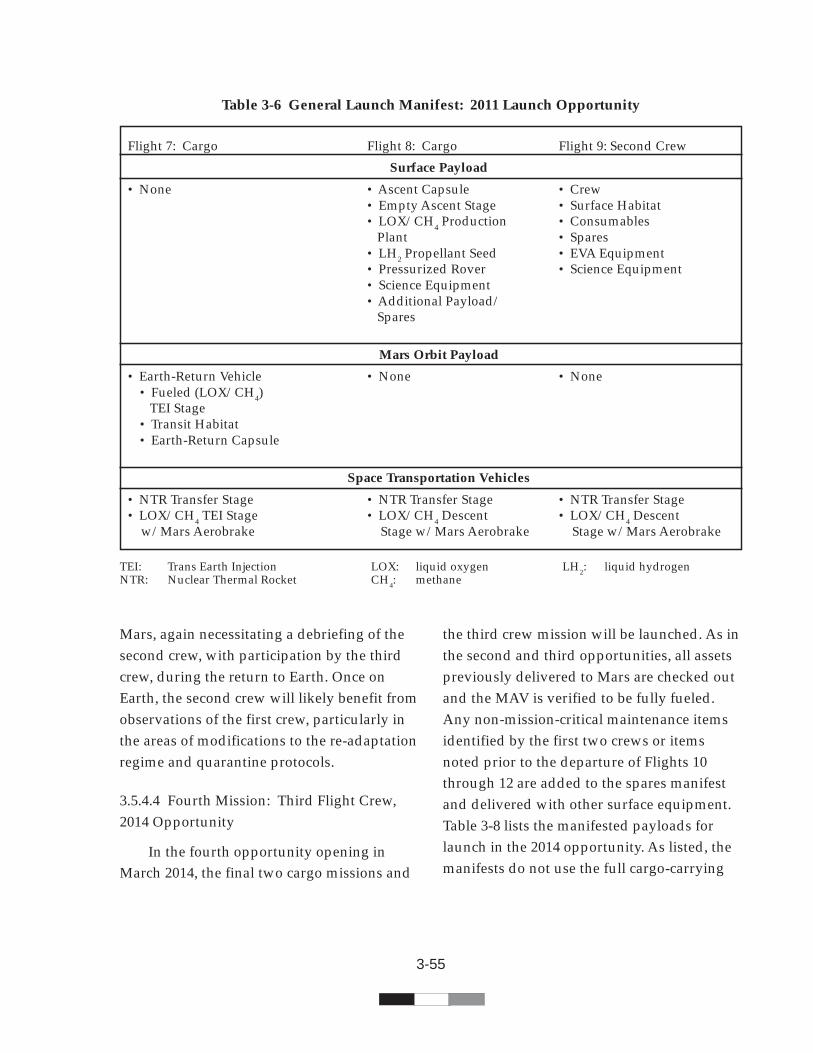
3-55
Mars, again necessitating a debriefing of thesecond crew, with participation by the thirdcrew, during the return to Earth. Once onEarth, the second crew will likely benefit fromobservations of the first crew, particularly inthe areas of modifications to the re-adaptationregime and quarantine protocols.
3.5.4.4 Fourth Mission: Third Flight Crew,2014 Opportunity
In the fourth opportunity opening inMarch 2014, the final two cargo missions and
the third crew mission will be launched. As inthe second and third opportunities, all assetspreviously delivered to Mars are checked outand the MAV is verified to be fully fueled.Any non-mission-critical maintenance itemsidentified by the first two crews or itemsnoted prior to the departure of Flights 10through 12 are added to the spares manifestand delivered with other surface equipment.Table 3-8 lists the manifested payloads forlaunch in the 2014 opportunity. As listed, themanifests do not use the full cargo-carrying
Table 3-6 General Launch Manifest: 2011 Launch Opportunity
Flight 7: Cargo Flight 8: Cargo Flight 9: Second Crew
Surface Payload
• None • Ascent Capsule • Crew• Empty Ascent Stage • Surface Habitat• LOX/CH4 Production • Consumables Plant • Spares• LH2 Propellant Seed • EVA Equipment• Pressurized Rover • Science Equipment• Science Equipment• Additional Payload/ Spares
Mars Orbit Payload
• Earth-Return Vehicle • None • None• Fueled (LOX/CH4) TEI Stage• Transit Habitat• Earth-Return Capsule
Space Transportation Vehicles
• NTR Transfer Stage • NTR Transfer Stage • NTR Transfer Stage• LOX/CH4 TEI Stage • LOX/CH4 Descent • LOX/CH4 Descent w/Mars Aerobrake Stage w/Mars Aerobrake Stage w/Mars Aerobrake
TEI: Trans Earth Injection LOX: liquid oxygen LH2: liquid hydrogenNTR: Nuclear Thermal Rocket CH4: methane
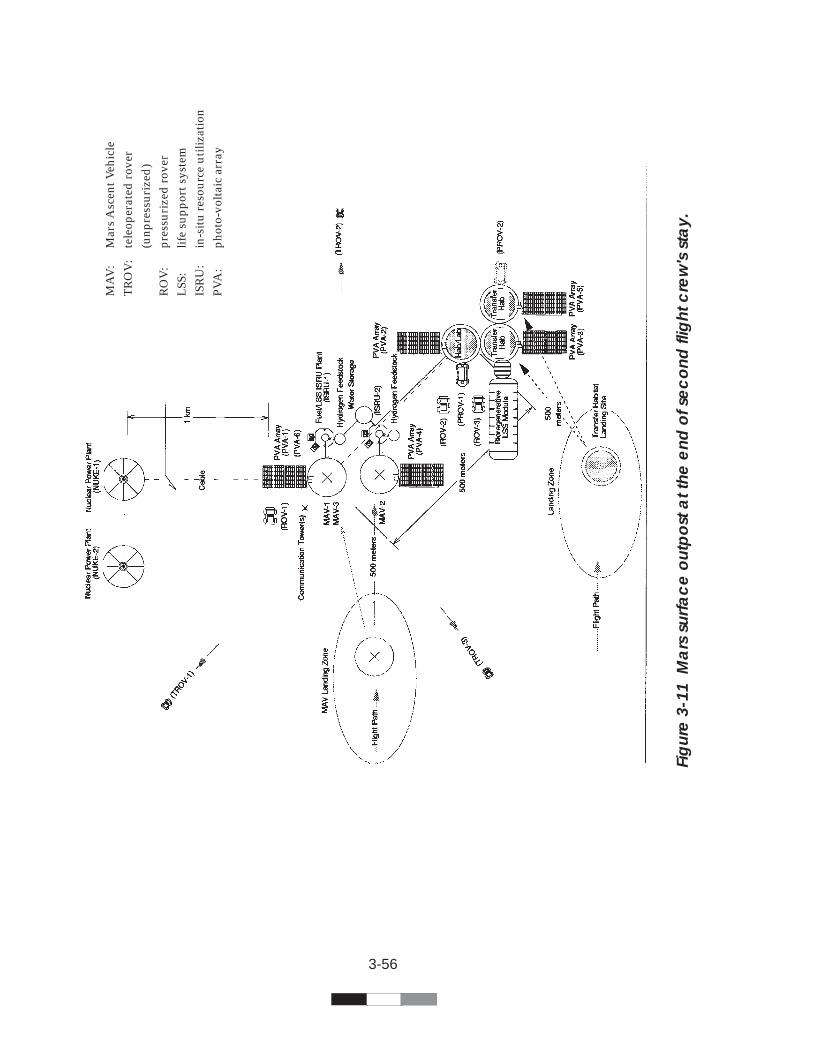
3-56
Fig
ure
3-1
1 M
ars
sur
fac
e o
utp
ost
at t
he e
nd o
f se
co
nd fl
ight
cre
w's
sta
y.
MA
V:
Mar
s A
scen
t Veh
icle
TR
OV
:te
leop
erat
ed r
over
(unp
ress
uriz
ed)
RO
V:
pres
suri
zed
rov
erL
SS:
life
supp
ort s
yste
mIS
RU
:in
-sit
u re
sour
ce u
tiliz
atio
nPV
A:
phot
o-vo
ltai
c ar
ray
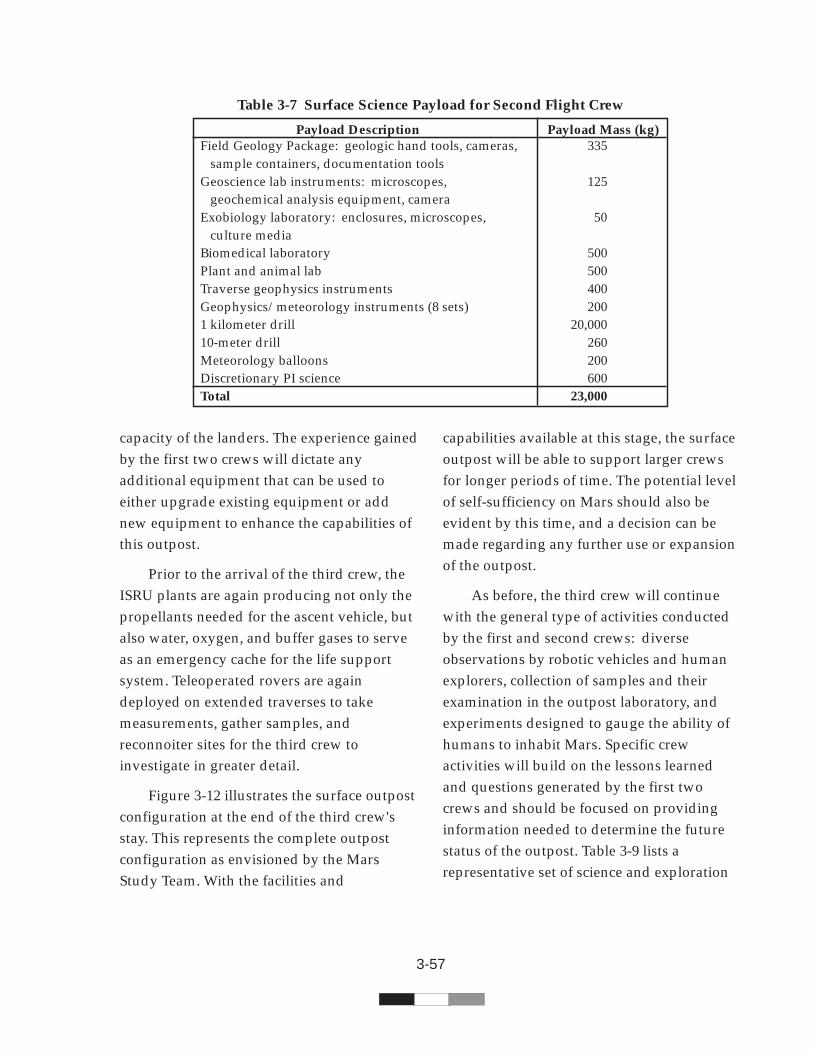
3-57
capacity of the landers. The experience gainedby the first two crews will dictate anyadditional equipment that can be used toeither upgrade existing equipment or addnew equipment to enhance the capabilities ofthis outpost.
Prior to the arrival of the third crew, theISRU plants are again producing not only thepropellants needed for the ascent vehicle, butalso water, oxygen, and buffer gases to serveas an emergency cache for the life supportsystem. Teleoperated rovers are againdeployed on extended traverses to takemeasurements, gather samples, andreconnoiter sites for the third crew toinvestigate in greater detail.
Figure 3-12 illustrates the surface outpostconfiguration at the end of the third crew'sstay. This represents the complete outpostconfiguration as envisioned by the MarsStudy Team. With the facilities and
capabilities available at this stage, the surfaceoutpost will be able to support larger crewsfor longer periods of time. The potential levelof self-sufficiency on Mars should also beevident by this time, and a decision can bemade regarding any further use or expansionof the outpost.
As before, the third crew will continuewith the general type of activities conductedby the first and second crews: diverseobservations by robotic vehicles and humanexplorers, collection of samples and theirexamination in the outpost laboratory, andexperiments designed to gauge the ability ofhumans to inhabit Mars. Specific crewactivities will build on the lessons learnedand questions generated by the first twocrews and should be focused on providinginformation needed to determine the futurestatus of the outpost. Table 3-9 lists arepresentative set of science and exploration
Table 3-7 Surface Science Payload for Second Flight Crew
Payload Description Payload Mass (kg)Field Geology Package: geologic hand tools, cameras, 335 sample containers, documentation toolsGeoscience lab instruments: microscopes, 125 geochemical analysis equipment, cameraExobiology laboratory: enclosures, microscopes, 50 culture mediaBiomedical laboratory 500Plant and animal lab 500Traverse geophysics instruments 400Geophysics/meteorology instruments (8 sets) 2001 kilometer drill 20,00010-meter drill 260Meteorology balloons 200Discretionary PI science 600Total 23,000
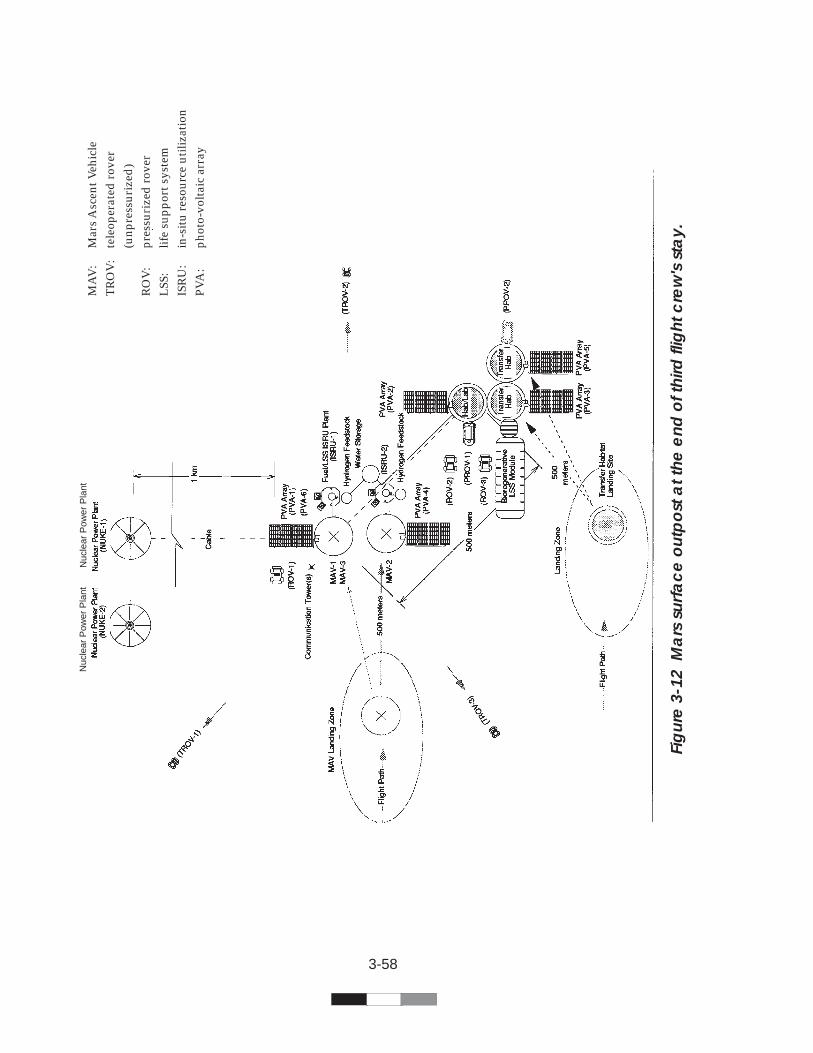
3-58
MA
V:
Mar
s A
scen
t Veh
icle
TR
OV
:te
leop
erat
ed r
over
(unp
ress
uriz
ed)
RO
V:
pres
suri
zed
rov
erL
SS:
life
supp
ort s
yste
mIS
RU
:in
-sit
u re
sour
ce u
tiliz
atio
nPV
A:
phot
o-vo
ltai
c ar
ray
Nuc
lear
Pow
er P
lant
Nuc
lear
Pow
er P
lant
Fig
ure
3-1
2 M
ars
sur
fac
e o
utp
ost
at t
he e
nd o
f thi
rd fl
ight
cre
w's
sta
y.
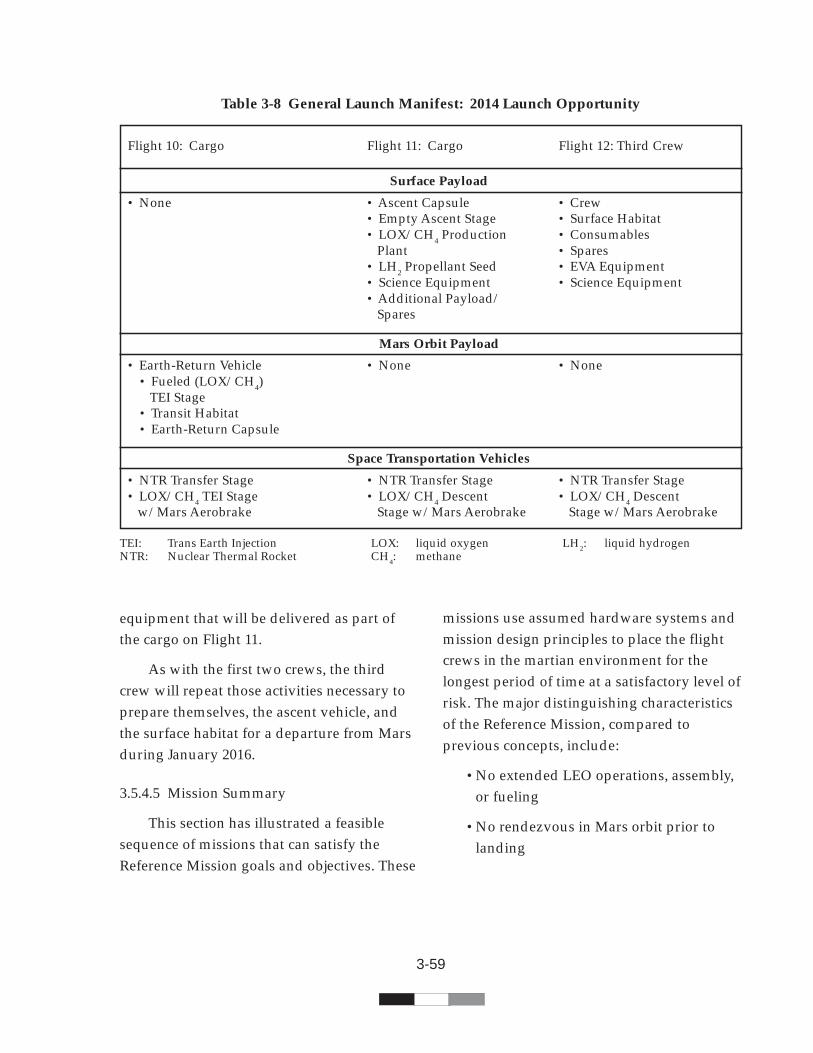
3-59
equipment that will be delivered as part ofthe cargo on Flight 11.
As with the first two crews, the thirdcrew will repeat those activities necessary toprepare themselves, the ascent vehicle, andthe surface habitat for a departure from Marsduring January 2016.
3.5.4.5 Mission Summary
This section has illustrated a feasiblesequence of missions that can satisfy theReference Mission goals and objectives. These
missions use assumed hardware systems andmission design principles to place the flightcrews in the martian environment for thelongest period of time at a satisfactory level ofrisk. The major distinguishing characteristicsof the Reference Mission, compared toprevious concepts, include:
•No extended LEO operations, assembly,or fueling
•No rendezvous in Mars orbit prior tolanding
Table 3-8 General Launch Manifest: 2014 Launch Opportunity
Flight 10: Cargo Flight 11: Cargo Flight 12: Third Crew
Surface Payload
• None • Ascent Capsule • Crew• Empty Ascent Stage • Surface Habitat• LOX/CH4 Production • Consumables Plant • Spares• LH2 Propellant Seed • EVA Equipment• Science Equipment • Science Equipment• Additional Payload/ Spares
Mars Orbit Payload
• Earth-Return Vehicle • None • None• Fueled (LOX/CH4) TEI Stage• Transit Habitat• Earth-Return Capsule
Space Transportation Vehicles
• NTR Transfer Stage • NTR Transfer Stage • NTR Transfer Stage• LOX/CH4 TEI Stage • LOX/CH4 Descent • LOX/CH4 Descent w/Mars Aerobrake Stage w/Mars Aerobrake Stage w/Mars Aerobrake
TEI: Trans Earth Injection LOX: liquid oxygen LH2: liquid hydrogenNTR: Nuclear Thermal Rocket CH4: methane
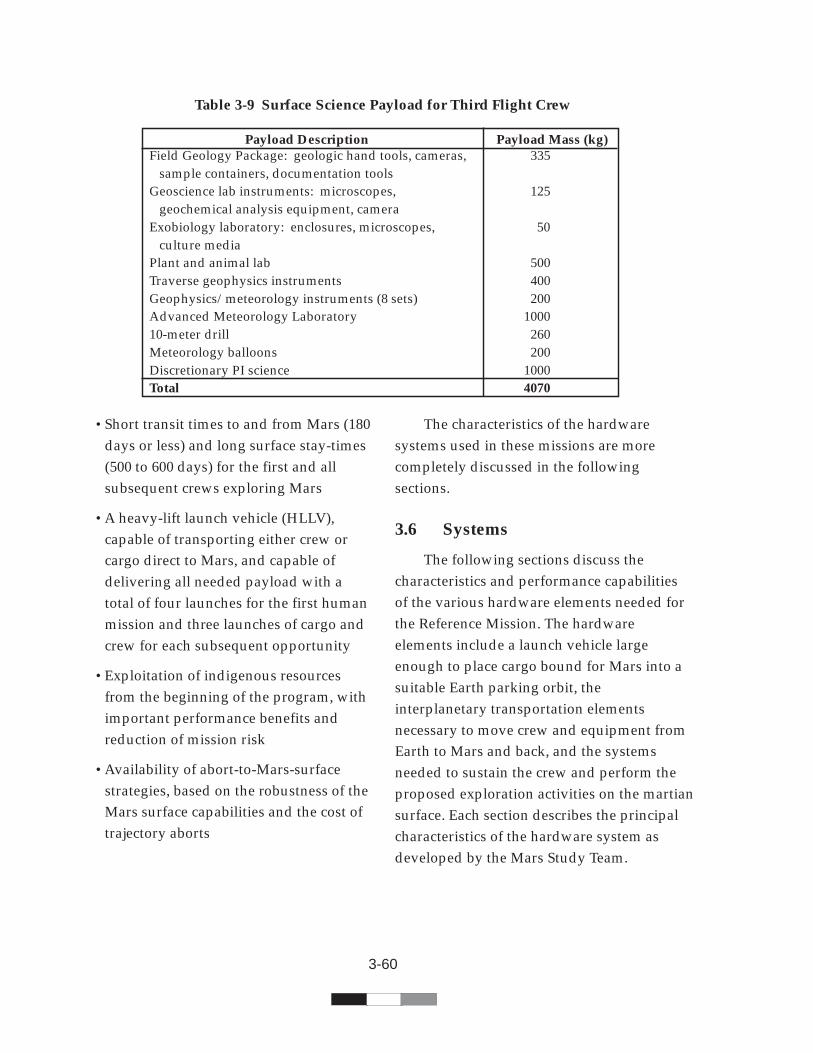
3-60
•Short transit times to and from Mars (180days or less) and long surface stay-times(500 to 600 days) for the first and allsubsequent crews exploring Mars
•A heavy-lift launch vehicle (HLLV),capable of transporting either crew orcargo direct to Mars, and capable ofdelivering all needed payload with atotal of four launches for the first humanmission and three launches of cargo andcrew for each subsequent opportunity
•Exploitation of indigenous resourcesfrom the beginning of the program, withimportant performance benefits andreduction of mission risk
•Availability of abort-to-Mars-surfacestrategies, based on the robustness of theMars surface capabilities and the cost oftrajectory aborts
The characteristics of the hardwaresystems used in these missions are morecompletely discussed in the followingsections.
3.6 Systems
The following sections discuss thecharacteristics and performance capabilitiesof the various hardware elements needed forthe Reference Mission. The hardwareelements include a launch vehicle largeenough to place cargo bound for Mars into asuitable Earth parking orbit, theinterplanetary transportation elementsnecessary to move crew and equipment fromEarth to Mars and back, and the systemsneeded to sustain the crew and perform theproposed exploration activities on the martiansurface. Each section describes the principalcharacteristics of the hardware system asdeveloped by the Mars Study Team.
Payload Description Payload Mass (kg)Field Geology Package: geologic hand tools, cameras, 335 sample containers, documentation toolsGeoscience lab instruments: microscopes, 125 geochemical analysis equipment, cameraExobiology laboratory: enclosures, microscopes, 50 culture mediaPlant and animal lab 500Traverse geophysics instruments 400Geophysics/meteorology instruments (8 sets) 200Advanced Meteorology Laboratory 100010-meter drill 260Meteorology balloons 200Discretionary PI science 1000Total 4070
Table 3-9 Surface Science Payload for Third Flight Crew

3-61
3.6.1 Operational DesignConsiderations
Several operational factors related toutilization, training, and repair influence thedesign of hardware and software systems forall vehicles. Early incorporation of thesefactors into the vehicle design process willenhance utility and functionality of thesystems, prevent costly workarounds late inthe development cycle, and maximize overallmission success.
This section discusses some of the designconsiderations identified as important in theeventual detailed design and construction ofsystems used for the Reference Mission.While the system descriptions in the sectionsthat follow may not reach a level of detail thatreflects the specific topics mentioned here, thedesign considerations should be consideredas guiding principles that should be used asmore detailed studies are performed.
A primary operational consideration insystem development is the subsequent easewith which users, specifically crew members,can become familiar with the system prior tothe mission. The more familiar crew membersare with vehicle hardware and software, theless time will be spent on systems operationsand the more time will be available forscience and exploration activities. By the sametoken, the more familiar technicians are withthe systems, the easier and less costlyproduction, maintenance, and repair will beduring the development process. To facilitatethis, all vehicles and systems need to use
common hardware and software whereapplicable. System commonality in powersources, interfaces, payload locker sizes, etc.,among all vehicles will ease nominaloperational activities such as replacements,reconfigurations, and hardware transfers.Commonality will also help maintaincorporate knowledge bases and simplify crewoperations and repair procedures asexperience with one system can be applied tomany. The cost savings associated with theuse of common hardware and softwareelements are obvious, and may be increasedby using as much off-the-shelf hardware aspossible. This, too, helps with familiarity ascrews and technicians may have previousexperience with similar systems. Repairoperations will also be simplified by requiringa smaller set of standard tools for use by thecrew during mission execution.
The need for training facilities will have asignificant impact on vehicle design. Due tothe extended duration of the mission, trainingfacilities will be required on board crewvehicles during various phases of the mission.Trainers on Earth will need to match trainerson vehicles which in turn will need to matchactual system performance. The requirementfor crew training facilities during variousmission phases will place additionalhardware and software design constraints onthe vehicles. Incorporation of trainingfacilities into appropriate vehicles is animportant operational factor influencing thedesign process.

3-62
For both crew safety and operationalsimplicity, system designs will require somelevel of automatic fault detection for all life-critical, mission-critical, and mission-discretionary elements. For those elementspertaining to crew safety and mission-criticalobjectives, auto-fault detection and correctionshould be incorporated into the design. Crewaction should not be required for life-criticalsystems failures; backup system activationshould be automatic. Mission-critical systemfailures should be as automated as possible,leaving only the most complex tasks (such ascomplete hardware replacement or repair) tothe crew. In addition, many of the routine, yetimportant, system operations should beautomated to the greatest extent possible. Forexample, an often overlooked aspect ofoperations is consumables tracking andforecasting for all life-critical and mission-critical systems. Crew time is better spent onscience activities than on tracking andforecasting consumables such as propellant,water, and breathable air. Many of thesefunctions are currently done for Space Shuttlecrews by flight controllers on the ground. Dueto the long delay time in communicationsduring the Reference Mission, maintenance ofthis function by ground personnel isimpractical. Periodic verification ofconsumables tracking activities by groundpersonnel can validate the crew activities;however, means by which the crew canindependently monitor and forecastpropulsive and nonpropulsive consumableswhile not expending significant resources is anecessity. Where cost effective, mission-
discretionary system failures can requiresome crew response to enhance missionobjectives. A balance between the cost ofautomation and crew time and training forsuch activities will be needed. In general,maximizing crew science time andminimizing crew system maintenance andoperations throughout the mission willimprove overall mission success.
3.6.2 Launch Vehicles
The scale of the ETO launch capability isfundamentally determined by the mass of thepayload that will be landed on the martiansurface. The nominal design mass forindividual packages to be landed on Mars inthe Reference Mission is 50 tonnes for a crewhabitat (sized for six people) which must betransferred on a high-energy, fast-transit orbit.This in turn scaled the required mass in LEOto about 240 tonnes.
A number of different technologies couldbe used to construct a single launch vehiclecapable of placing 240 tonnes into a 220-nautical mile circular orbit. These launchvehicle concepts used various combinationsof past, present, and future U.S. expendablelaunch vehicle technology and existing launchvehicle technology from Russia and Ukraine.Table 3-10 summarizes some of the keyparameters for a representative set of thevehicle options examined (Huber, 1993). Eachoption is covered in more detail in thefollowing paragraphs.
Option 1 (Figure 3-13) illustrates thecapabilities possible through the use of
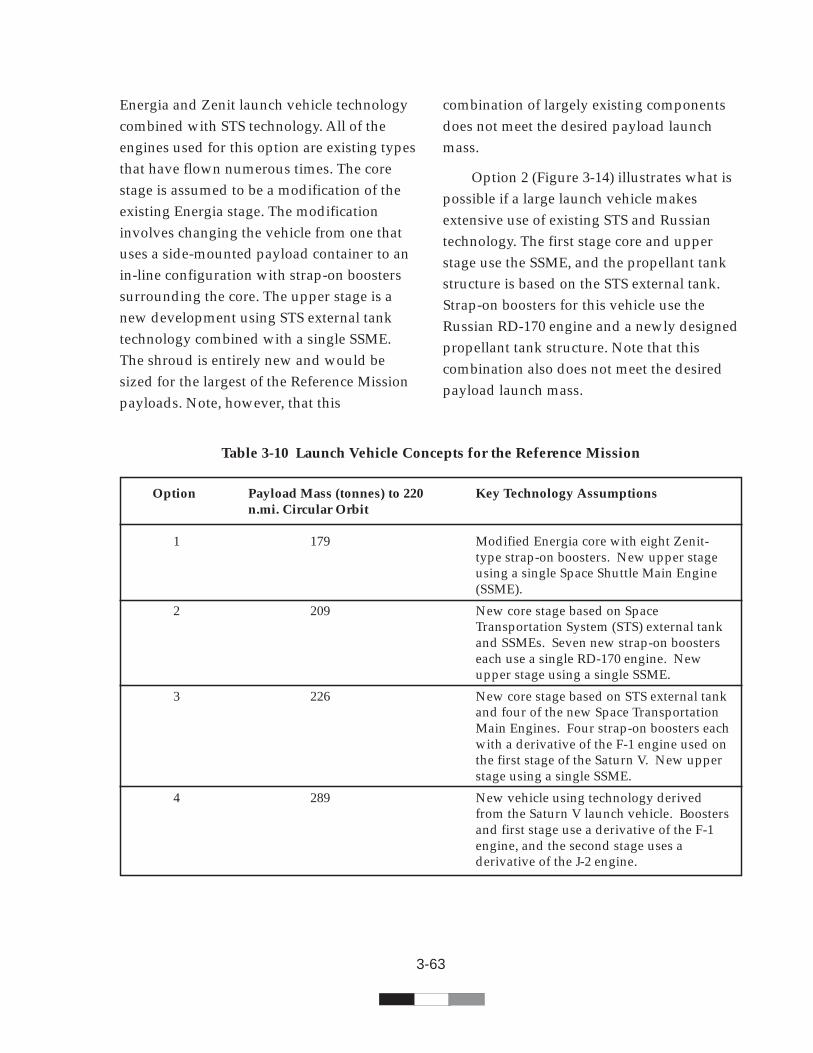
3-63
Energia and Zenit launch vehicle technologycombined with STS technology. All of theengines used for this option are existing typesthat have flown numerous times. The corestage is assumed to be a modification of theexisting Energia stage. The modificationinvolves changing the vehicle from one thatuses a side-mounted payload container to anin-line configuration with strap-on boosterssurrounding the core. The upper stage is anew development using STS external tanktechnology combined with a single SSME.The shroud is entirely new and would besized for the largest of the Reference Missionpayloads. Note, however, that this
combination of largely existing componentsdoes not meet the desired payload launchmass.
Option 2 (Figure 3-14) illustrates what ispossible if a large launch vehicle makesextensive use of existing STS and Russiantechnology. The first stage core and upperstage use the SSME, and the propellant tankstructure is based on the STS external tank.Strap-on boosters for this vehicle use theRussian RD-170 engine and a newly designedpropellant tank structure. Note that thiscombination also does not meet the desiredpayload launch mass.
Option Payload Mass (tonnes) to 220 Key Technology Assumptionsn.mi. Circular Orbit
1 179 Modified Energia core with eight Zenit-type strap-on boosters. New upper stageusing a single Space Shuttle Main Engine(SSME).
2 209 New core stage based on SpaceTransportation System (STS) external tankand SSMEs. Seven new strap-on boosterseach use a single RD-170 engine. Newupper stage using a single SSME.
3 226 New core stage based on STS external tankand four of the new Space TransportationMain Engines. Four strap-on boosters eachwith a derivative of the F-1 engine used onthe first stage of the Saturn V. New upperstage using a single SSME.
4 289 New vehicle using technology derivedfrom the Saturn V launch vehicle. Boostersand first stage use a derivative of the F-1engine, and the second stage uses aderivative of the J-2 engine.
Table 3-10 Launch Vehicle Concepts for the Reference Mission
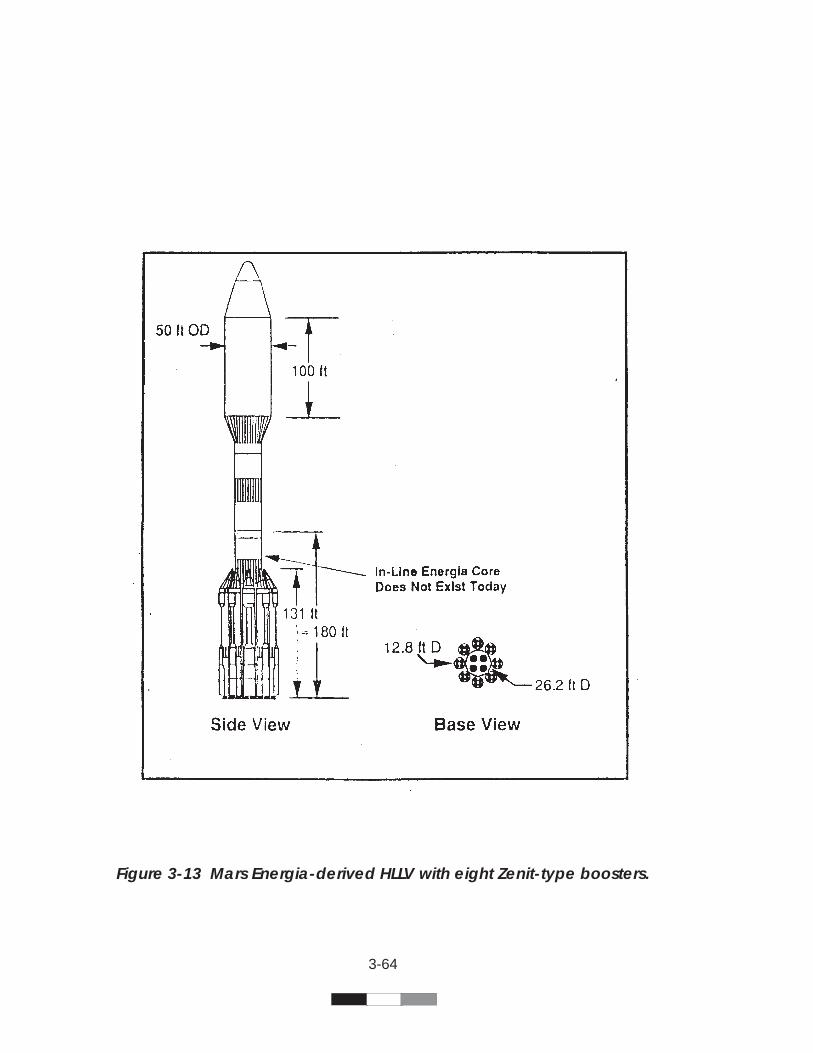
3-64
Figure 3-13 Mars Energia-derived HLLV with eight Zenit-type boosters.
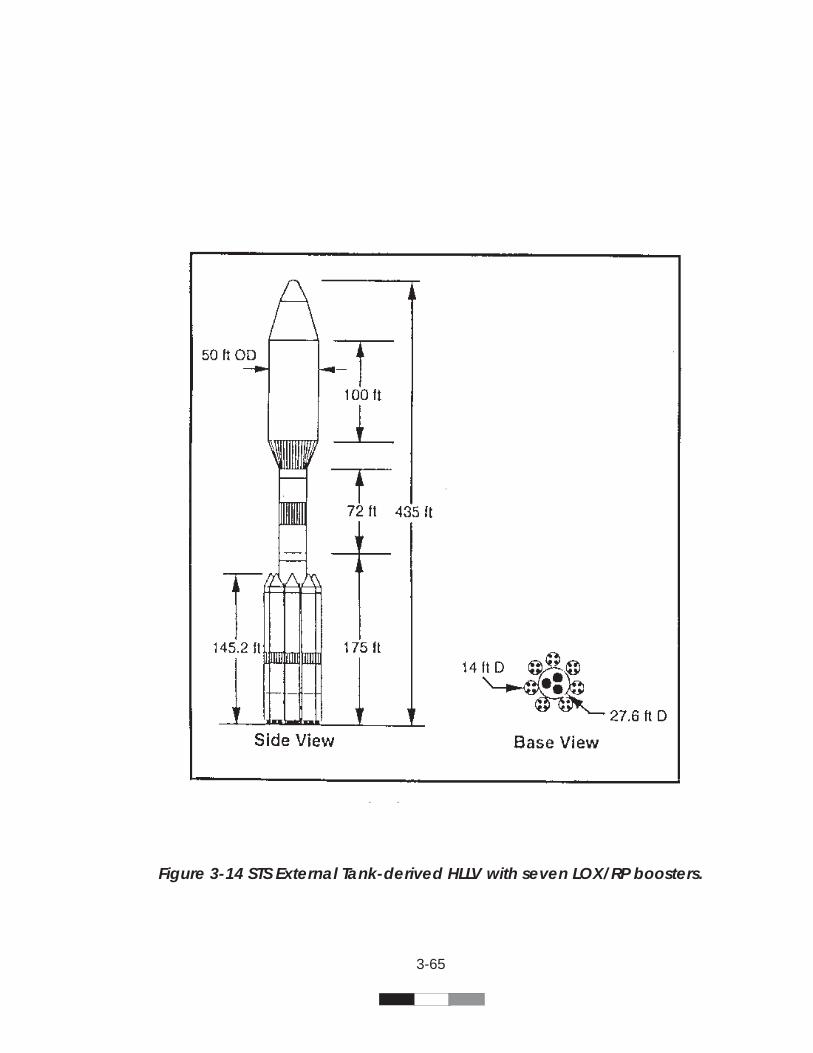
3-65
Figure 3-14 STS External Tank-derived HLLV with seven LOX/RP boosters.

3-66
Option 3 (Figure 3-15) uses new and oldas well as existing technology to create avehicle that can deliver a payload that isreasonably close to the desired value. The firststage core propellant tank structure is basedon the STS external tank but uses newlydesigned and as yet untested STME engines.The strap-on boosters use an updated versionof the F-1 engine that powered the first stageof the Saturn V in conjunction with newlydesigned propellant tanks. The upper stage iscomparable to those discussed for the firsttwo options, using STS external tanktechnology and a single SSME.
Option 4 (Figure 3-16) is indicative of alaunch vehicle that uses technology derivedfrom the Saturn V launch vehicle. The firststage core is virtually identical to the firststage of the Saturn V launch vehicle in itsbasic size and its use of five F-1A engines.Strapped to this stage are four boosters, eachwith two F-1A engines and roughly one-thirdof the propellant carried by the core stage.The second stage uses six of the J-2 enginesthat powered the second stage of the SaturnV. However, this upper stage is considerablylarger than the Saturn second stage.
This last option was the largest of afamily of launch vehicles derived usingSaturn V launch vehicle technology. Figure3-17 illustrates some of the other vehicleconfigurations examined and providesadditional information on their capabilities.All of these options can deliver a payloadalmost as large as the stated need for 240tonnes in a 220-nautical mile circular orbit.
Because a 240-ton-class launch vehiclewould be such a development cost issue,consideration was given to the option oflaunching several hardware elements to LEOusing smaller vehicles, assembling (attaching)them in space, and then launching on theoutbound trajectory to Mars. This smallerlaunch vehicle (with a 110- to 120-ton payloadcapability) would have the advantage of moremodest development costs and is in theenvelope of capability demonstrated by theunmodified U.S. Saturn V and RussianEnergia programs (Figure 3-18). However,this smaller launch vehicle introduces severalpotential difficulties to the Reference Missionscenario. The most desirable implementationusing this smaller launch vehicle is to simplydock the two elements in Earth orbit andimmediately depart for Mars. To avoid boilofflosses in the departure stages (assumed to useliquid hydrogen as the propellant), allelements must be launched from Earth inquick succession, placing a strain on existinglaunch facilities and ground operations crews.Assembling the Mars vehicles in orbit andloading them with propellants just prior todeparture may alleviate the strain on launchfacilities, but the best Earth orbit for Marsmissions is different for each launchopportunity, so a permanent constructionand/or propellant storage facility in a singleEarth orbit introduces additional constraints.
Several launch vehicle designs that couldprovide this smaller payload capability usingexisting or near-term technology wereexamined. Figure 3-19 illustrates one possible
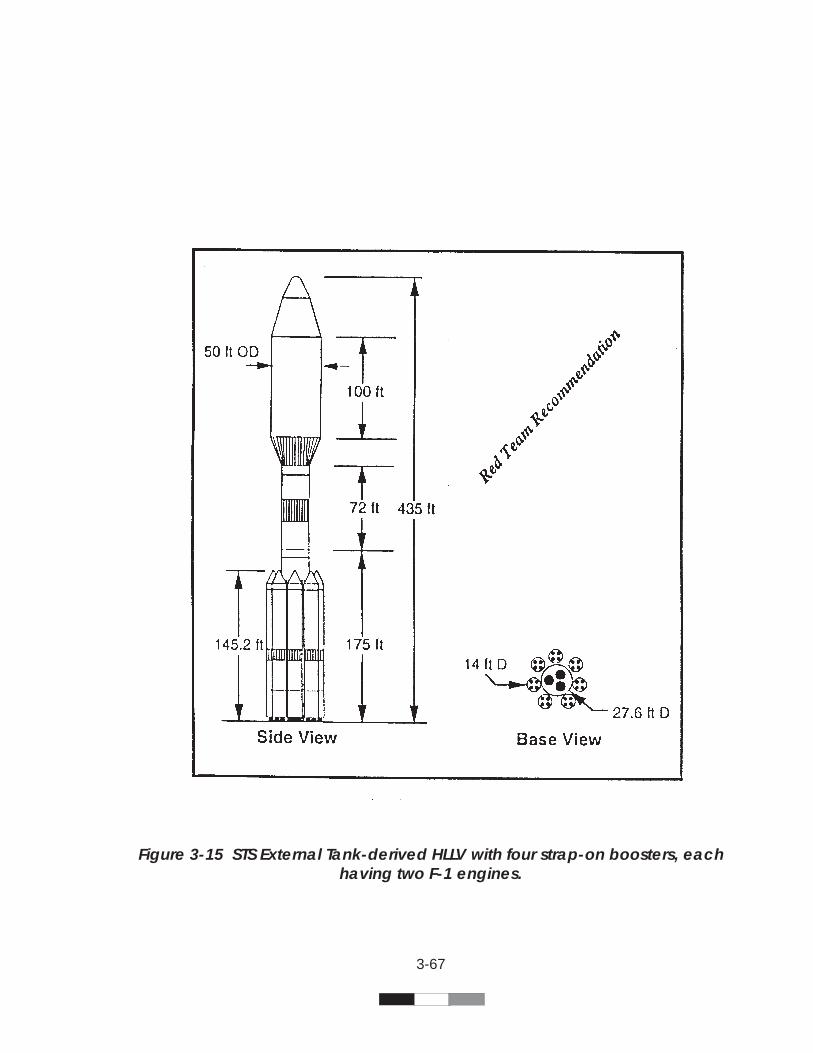
3-67
Figure 3-15 STS External Tank-derived HLLV with four strap-on boosters, eachhaving two F-1 engines.
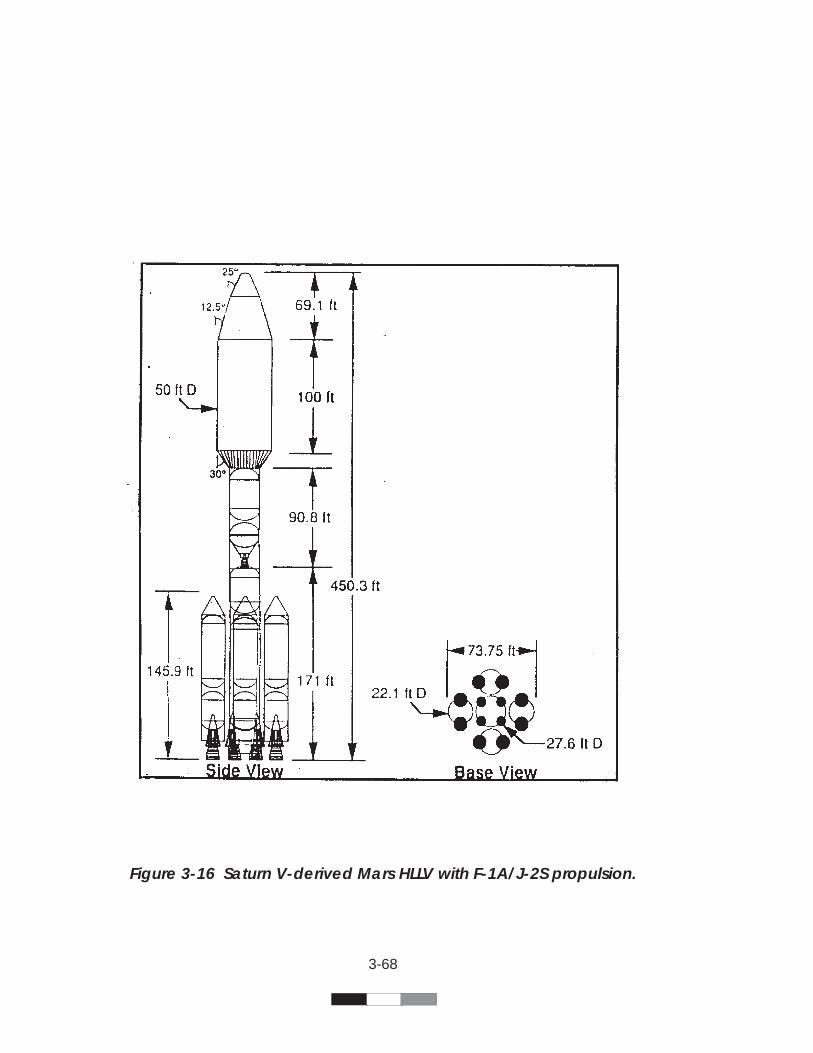
3-68
Figure 3-16 Saturn V-derived Mars HLLV with F-1A/J-2S propulsion.
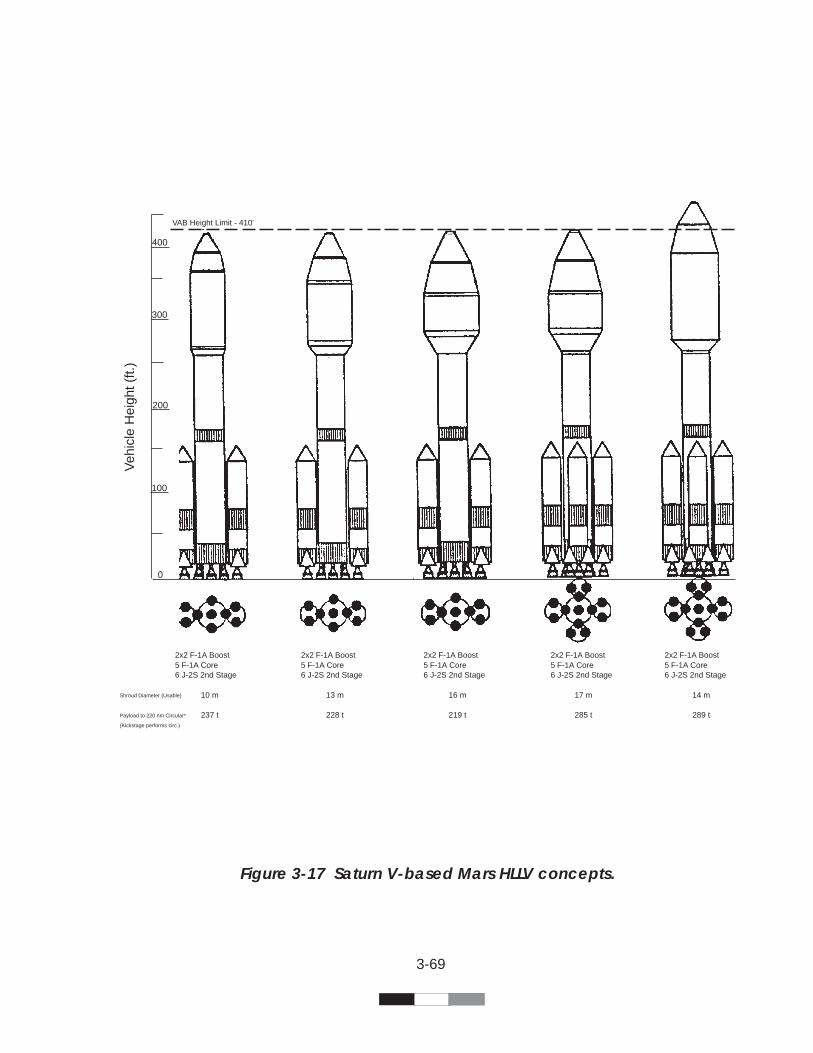
3-69
Figure 3-17 Saturn V-based Mars HLLV concepts.
2x2 F-1A Boost5 F-1A Core6 J-2S 2nd Stage
10 m
237 t
Veh
icle
Hei
ght (
ft.)
400
VAB Height Limit - 410'
300
200
100
0
2x2 F-1A Boost5 F-1A Core6 J-2S 2nd Stage
13 m
228 t
2x2 F-1A Boost5 F-1A Core6 J-2S 2nd Stage
16 m
219 t
2x2 F-1A Boost5 F-1A Core6 J-2S 2nd Stage
17 m
285 t
2x2 F-1A Boost5 F-1A Core6 J-2S 2nd Stage
14 m
289 t
Shroud Diameter (Usable)
Payload to 220 nm Circular*
(Kickstage performs circ.)
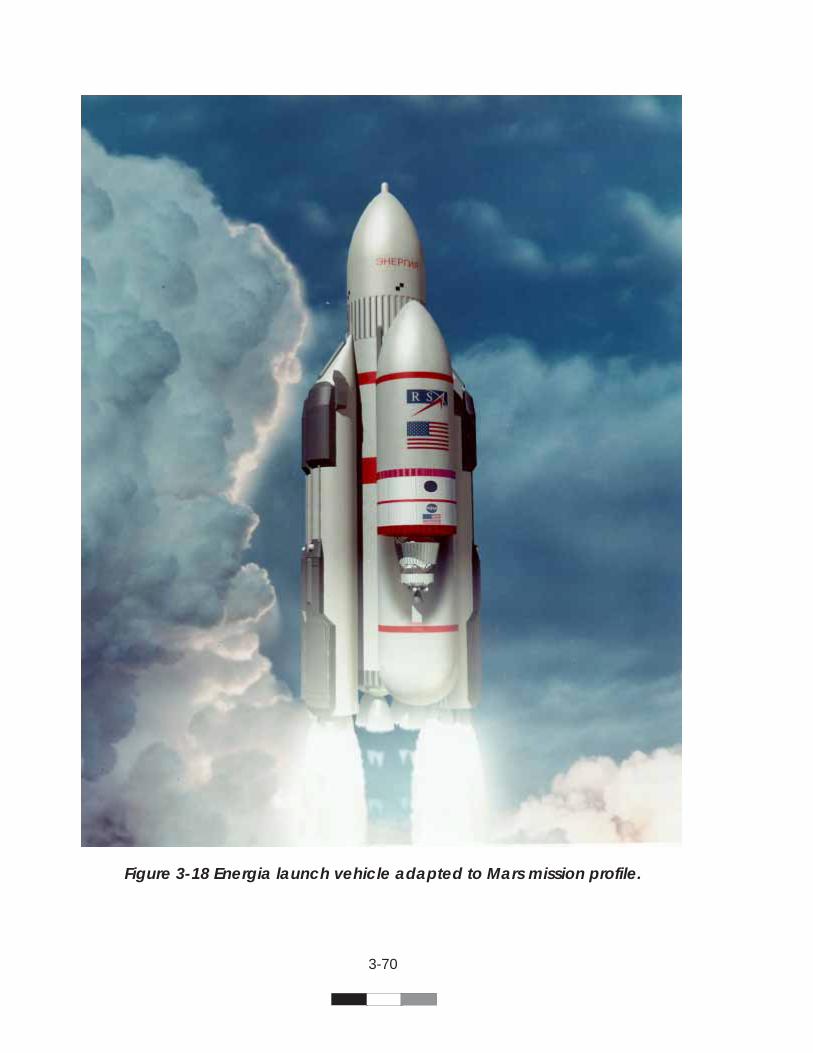
3-70
Figure 3-18 Energia launch vehicle adapted to Mars mission profile.
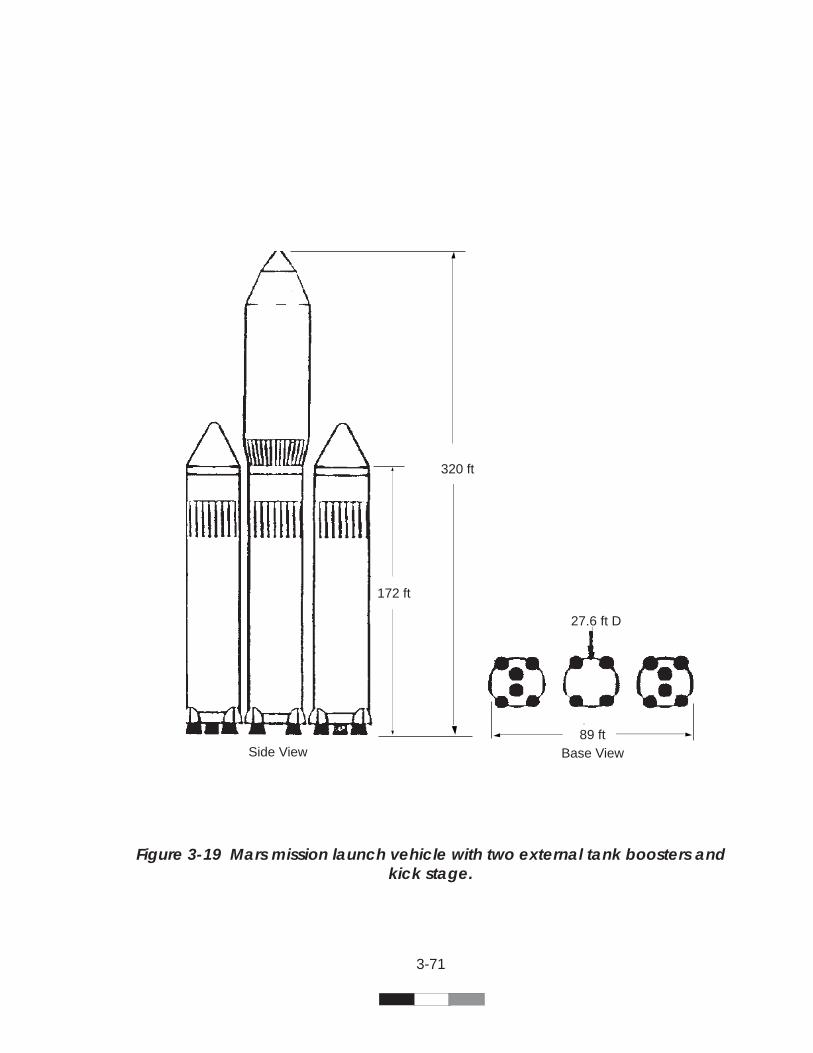
3-71
320 ft
172 ft
89 ft
27.6 ft D
Side View Base View
Figure 3-19 Mars mission launch vehicle with two external tank boosters andkick stage.

3-72
vehicle configuration and provides additionalinformation on its capabilities. This particularoption uses the STS external tank for itspropellant storage and main structure.Engines for the core stage and the two strap-on boosters were assumed to be the STMEengine that was under development at thetime of this study.
A 240-ton payload-class launch vehicle isassumed for the Reference Mission. However,it is beyond the experience base of anyspacefaring nation. While such a vehicle ispossible, it would require a significantdevelopment effort for the launch vehicle,launch facilities, and ground processingfacilities; and its cost represents aconsiderable fraction of the total mission cost.The choice of a launch vehicle remains anunresolved issue for any Mars mission.
3.6.3 Interplanetary Transportation
The interplanetary transportation systemassembled for the Reference Mission consistsof seven major systems: a TMI stage, abiconic aeroshell for Mars orbit capture andMars atmospheric entry, habitation systemsfor the crew (both outbound and return), adescent stage for landing on the surface, anascent stage for crew return to Mars orbit, anERV for departure from the Mars system, andan ECCV (comparable to Apollo) for Earthentry and landing. As mentioned earlier, theReference Mission splits the transportation ofpeople and equipment into cargo missionsand human missions, all of which are targetedto the same locale on the surface and must be
landed in close proximity to one another. Thetransportation strategy adopted in theReference Mission eliminates the need forassembly or rendezvous in LEO of vehicleelements and for rendezvous of a crewtransport vehicle with a Mars lander in Marsorbit, both features of many previous missiondesigns for Mars (NASA, 1989). But theReference Mission scenario does require arendezvous on the surface with previouslylanded hardware elements and a rendezvousin Mars orbit with the ERV as the crew leavesMars. The transportation strategy emphasizedthe use of common elements whereverpossible to avoid development costs and toprovide operational simplicity.
3.6.3.1 Trans-Mars Injection Stage
A single TMI stage was developed forboth piloted and human missions. The stageis designed for the more energeticallydemanding 2009 human mission and is thenused in the minimum energy cargo missionsto launch the maximum payload possible toMars. Because of the energetic trajectoriesused for human flights and the desire todeliver large payloads to the martian surface,nuclear thermal propulsion was selected forthis stage not only for its performanceadvantages but also because of its advanced,previously demonstrated state of technologydevelopment, its operational flexibility, andits inherent mission enhancements and crewrisk reduction (Borowski, et al., 1993).
After completion of two TMI burns(required by the selected thrust-to-weight

3-73
ratio), the stage is disposed of by allowing itto drift on a relatively stable interplanetarytrajectory. Calculations (Stancati and Collins,1992) using the Planetary EncounterProbability Analysis code indicate that theprobability of a collision of a nuclear engine-equipped vehicle and the Earth is quite low.The probabilities of a collision with Earth inone million years are 3.8 percent for thepiloted TMI stages and 12 percent for thecargo TMI stages.
The basic TMI stage is shown in Figure3-20. For piloted missions, the TMI stage usesfour 15,000 lb. thrust NERVA* derivative(ND) engines to deliver the crew and theirsurface habitat/descent stage onto the trans-Mars trajectory. Engines of this size are wellwithin the previous development history ofNERVA engines (Borowski, et al., 1993). Thisversion of the TMI stage incorporates ashadow shield between the ND engineassembly and the LH2 tank to protect the crewfrom radiation generated by the engines thatwill have built up during the TMI burns. Forcargo missions, this transportation system candeliver approximately 65 tonnes of usefulcargo to the surface of Mars or nearly 100tonnes to Mars orbit (250 I 33,793 km) on asingle launch from Earth. The TMI stage forcargo delivery requires only the use of three
ND engines. So for cost and performancereasons, one ND engine and the shadowshield are removed from this version of theTMI stage.
The TMI stage adopted for the ReferenceMission could be designed around any of fourreactor options studied by the Team: (1)Rocketdyne and Westinghouse NERVA-derivative reactor (ND), (2) Pratt and Whitneyand Babcock and Wilcox (B&W) CERMET fastreactor, (3) Aerojet and B&W particle bedreactor and (4) Russian Energopool and B&Wengine concept using the “twisted ribbon”ternary carbide fuel form. Work done inRussia is especially promising, with thepossibility of higher Isp (approximately 950seconds versus a 900-second demonstratedcapability by NERVA engines) at a thrust-to-weight ratio of about 3.0 (for a 15,000 poundthrust engine) being a possible developmenttarget. The Reference Mission adopts themore conservative ND engine concept, with aprojected Isp performance of 900 seconds.Table 3-11 lists the mass estimates for thevarious components of the TMI stage forpiloted and cargo versions. In both versions,this stage is assumed to have a maximumdiameter of 10 meters and an overall length of25.3 meters.
3.6.3.2 Biconic Aeroshell
On each cargo and piloted mission, Marsorbit capture and the majority of the Marsdescent maneuver are performed using asingle biconic aeroshell. The decision toperform the Mars orbit capture maneuver
From 1955 to 1973, the Nuclear Engine for RocketVehicle Application (NERVA) program designed, built,and tested a total of twenty rocket reactors. Thefeasibility of using low molecular weight LH2 as both areactor coolant and propellant was convincinglydemonstrated.
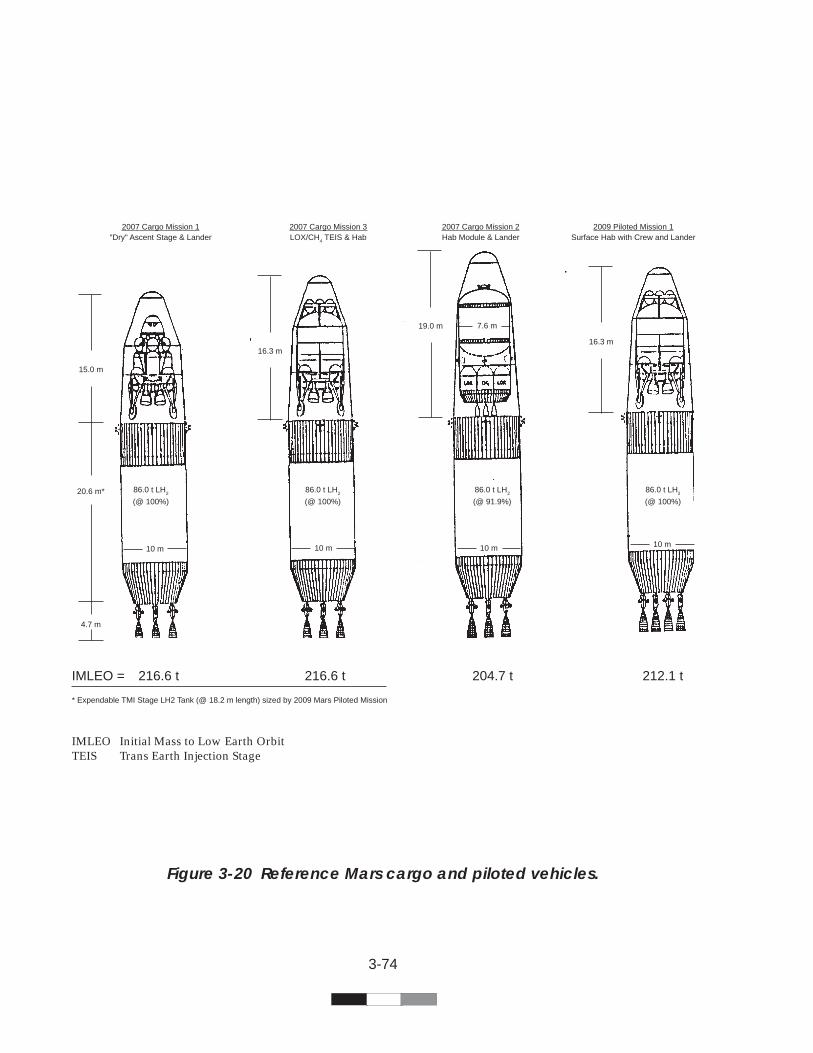
3-74
Figure 3-20 Reference Mars cargo and piloted vehicles.
IMLEO Initial Mass to Low Earth OrbitTEIS Trans Earth Injection Stage
2007 Cargo Mission 1"Dry" Ascent Stage & Lander
2007 Cargo Mission 2Hab Module & Lander
2007 Cargo Mission 3LOX/CH4 TEIS & Hab
2009 Piloted Mission 1Surface Hab with Crew and Lander
IMLEO = 216.6 t 216.6 t 204.7 t 212.1 t
* Expendable TMI Stage LH2 Tank (@ 18.2 m length) sized by 2009 Mars Piloted Mission
20.6 m*
4.7 m
10 m 10 m 10 m 10 m
86.0 t LH2
(@ 100%)
86.0 t LH2
(@ 100%)
86.0 t LH2
(@ 91.9%)
86.0 t LH2
(@ 100%)
15.0 m
16.3 m
19.0 m 7.6 m
16.3 m
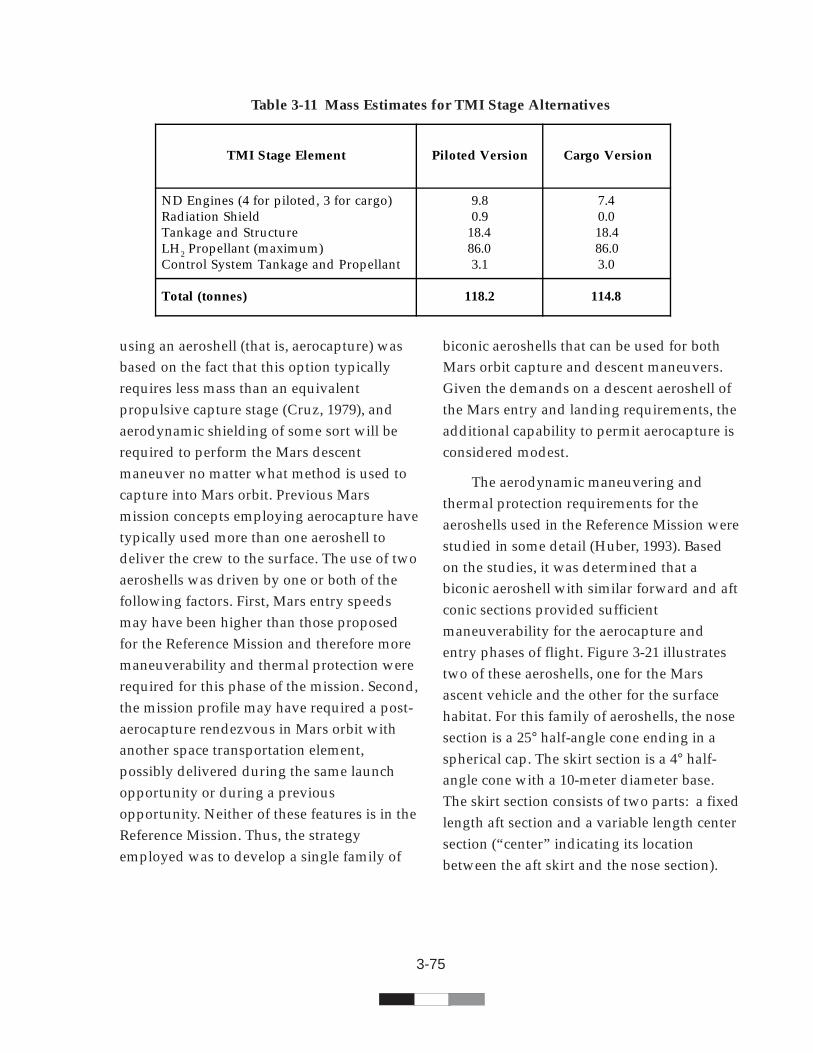
3-75
using an aeroshell (that is, aerocapture) wasbased on the fact that this option typicallyrequires less mass than an equivalentpropulsive capture stage (Cruz, 1979), andaerodynamic shielding of some sort will berequired to perform the Mars descentmaneuver no matter what method is used tocapture into Mars orbit. Previous Marsmission concepts employing aerocapture havetypically used more than one aeroshell todeliver the crew to the surface. The use of twoaeroshells was driven by one or both of thefollowing factors. First, Mars entry speedsmay have been higher than those proposedfor the Reference Mission and therefore moremaneuverability and thermal protection wererequired for this phase of the mission. Second,the mission profile may have required a post-aerocapture rendezvous in Mars orbit withanother space transportation element,possibly delivered during the same launchopportunity or during a previousopportunity. Neither of these features is in theReference Mission. Thus, the strategyemployed was to develop a single family of
biconic aeroshells that can be used for bothMars orbit capture and descent maneuvers.Given the demands on a descent aeroshell ofthe Mars entry and landing requirements, theadditional capability to permit aerocapture isconsidered modest.
The aerodynamic maneuvering andthermal protection requirements for theaeroshells used in the Reference Mission werestudied in some detail (Huber, 1993). Basedon the studies, it was determined that abiconic aeroshell with similar forward and aftconic sections provided sufficientmaneuverability for the aerocapture andentry phases of flight. Figure 3-21 illustratestwo of these aeroshells, one for the Marsascent vehicle and the other for the surfacehabitat. For this family of aeroshells, the nosesection is a 25° half-angle cone ending in aspherical cap. The skirt section is a 4° half-angle cone with a 10-meter diameter base.The skirt section consists of two parts: a fixedlength aft section and a variable length centersection (“center” indicating its locationbetween the aft skirt and the nose section).
Table 3-11 Mass Estimates for TMI Stage Alternatives
TMI Stage Element Piloted Version Cargo Version
ND Engines (4 for piloted, 3 for cargo)Radiation ShieldTankage and StructureLH2 Propellant (maximum)Control System Tankage and Propellant
9.80.9
18.486.03.1
7.40.018.486.03.0
Total (tonnes) 118.2 114.8
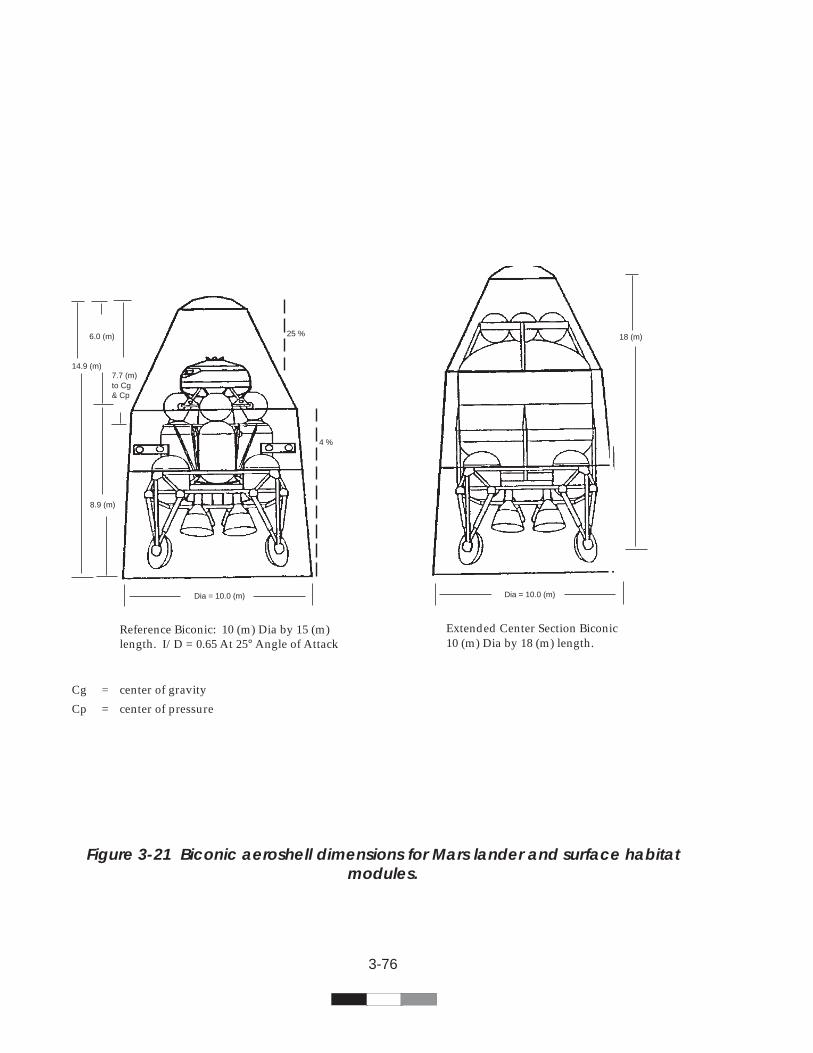
3-76
Figure 3-21 Biconic aeroshell dimensions for Mars lander and surface habitatmodules.
Cg = center of gravity
Cp = center of pressure
14.9 (m)
6.0 (m)
8.9 (m)
7.7 (m)to Cg& Cp
Dia = 10.0 (m) Dia = 10.0 (m)
25 %
4 %
18 (m)
Reference Biconic: 10 (m) Dia by 15 (m)length. I/D = 0.65 At 25° Angle of Attack
Extended Center Section Biconic10 (m) Dia by 18 (m) length.

3-77
The length of the skirt center section isdetermined by the size of the payload carriedwithin. Table 3-12 lists the overall lengths ofthe various aeroshells used in the ReferenceMission.
Table 3-12 also lists an estimated mass forthe various aeroshells. The Mars Study Teamdid not conduct a detailed study of the massof the various aeroshells used. Based onprevious studies of aerocapture vehicles, asimple scaling factor of 15 percent of the entrymass was used to determine the aeroshellmass (Scott, et al., 1985). As more detailregarding the aeroshell is developed,variations in aeroshell mass will result causedby differences in the amount of thermalprotection material used (some missions areflown on faster trajectories and will encounterhigher entry speeds with correspondinglyhigher heat loads) and in the size of theaeroshell structure. At the present level of thisstudy, the simple scaling factor is consideredsufficient to estimate the aeroshell mass.
3.6.3.3 Transit/Surface Habitat
The crew is transported to Mars in ahabitat that is identical to the surface habitat/
laboratory deployed robotically on a previousmission. Although a smaller habitat mightsuffice for a crew of six during theapproximately 6 months of transit time,designing the habitat so that it can be usedduring transit and on the surface results in anumber of advantages to the overall mission.Duplicating habitats on the surface providesredundancy during the longest phase of themission and reduces the risk to the crew. Bylanding in a fully functional habitat, the crewdoes not have to transfer from a “space-only”habitat to the surface habitat immediatelyafter landing, allowing them to re-adapt to agravity environment at their own pace. Thisapproach also allows the development of onlyone habitat system instead of two or moreunique, specialized systems (although somesubsystems will have to be tailored for zero-goperation). The performance of the transithabitat may be tested by attaching adevelopment unit to the International SpaceStation (Figure 3-22).
Each habitation element will consist of astructural cylinder 7.5 meters in diameter and4.6 meters long with two elliptical end caps(overall length of 7.5 meters). The internal
Table 3-12 Mass and Size Estimates for Biconic Aeroshell Family
Aeroshell Payload Mass Estimate
(tonnes) Overall Length
(meters)
Ascent Stage and LanderSurface Habitat and LanderTEI Stage and HabitatSurface Habitat with Crew and Lander
17.317.317.317.3
15.016.319.016.3
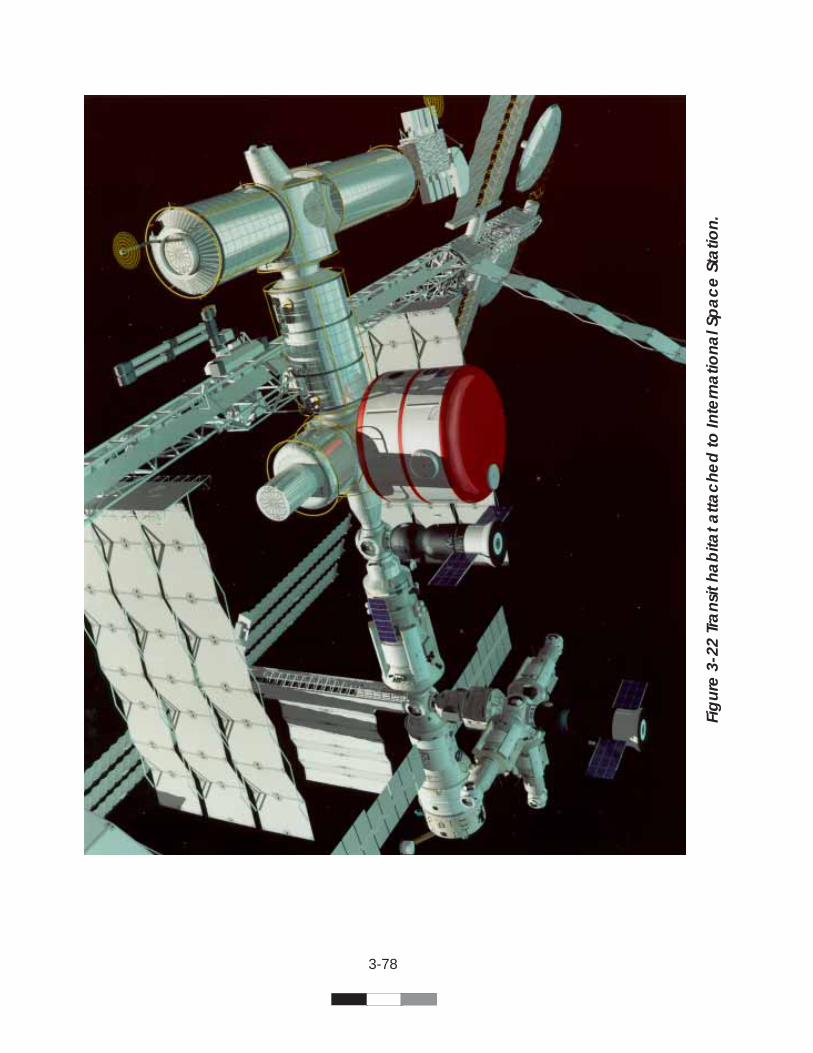
3-78
Fig
ure
3-2
2 Tr
ans
it ha
bita
t atta
che
d to
Inte
rna
tiona
l Sp
ac
e S
tatio
n.

3-79
volume will be divided into two levelsoriented so that each “floor” will be a cylinder7.5 meters in diameter and approximately 3meters in height. The primary and secondarystructure, windows, hatches, dockingmechanisms, power distribution systems, lifesupport, environmental control, safetyfeatures, stowage, waste management,communications, airlock function and crewegress routes will be identical to the otherhabitation elements (the surface habitat/laboratory and the Earth-return habitat). Afterestablishing these basic design features, thereexists an endless array of feasible internalarchitecture designs. Deciding among feasibleinternal designs involves a trade of resourcesderived from a specific set of habitation goals.At this level of detail, habitation goals aresomewhat subjective and open for discussion.Figures 3-23, 3-24, and 3-25 illustrate oneinternal arrangement for the transit/surfacehabitat that was investigated for feasibilityand cost purposes.
The Mars transit/surface habitat willcontain the required consumables for theMars transit and surface duration ofapproximately 800 days (approximately 180days for transit and approximately 600 dayson the surface) as well as all the requiredsystems for the crew during the 180-daytransfer trip. Table 3-13 provides a breakdownof the estimated masses for this particularhabitat.
Once on the surface of Mars, this transit/surface habitat will be physically connectedwith the previously landed surface laboratory,
doubling the usable pressurized volume (toapproximately 1,000 cubic meters) availableto the crew for the 600-day surface mission.This configuration is illustrated in Figure 3-26with the first of the transit habitats joined tothe previously landed surface habitat/laboratory.
3.6.3.4 Mars Surface Lander
A single common descent stage wasdeveloped for delivery of all hardwaresystems (the habitats, ascent vehicle,propellant production plant, and othersurface cargo) to the surface of Mars. The roleof this stage is to complete the descent-to-landing maneuver once the biconic aeroshellceases to be effective and to maneuver thesurface systems into the appropriate relativeposition at the surface outpost.
The descent stage consists of foursubsystems: a basic structure to which allother elements (including payload) areattached, a parachute system to assist inslowing the stage, a propulsion system toslow the stage prior to landing, and a surfacemobility system.
The use of parachutes has been assumedto help reduce the descent vehicle’s speedafter the aeroshell has ceased to be effectiveand prior to the final propulsive maneuver(Figure 3-27). Sufficient atmosphere is presentfor parachutes to be more effective than anequivalent mass of propellant.
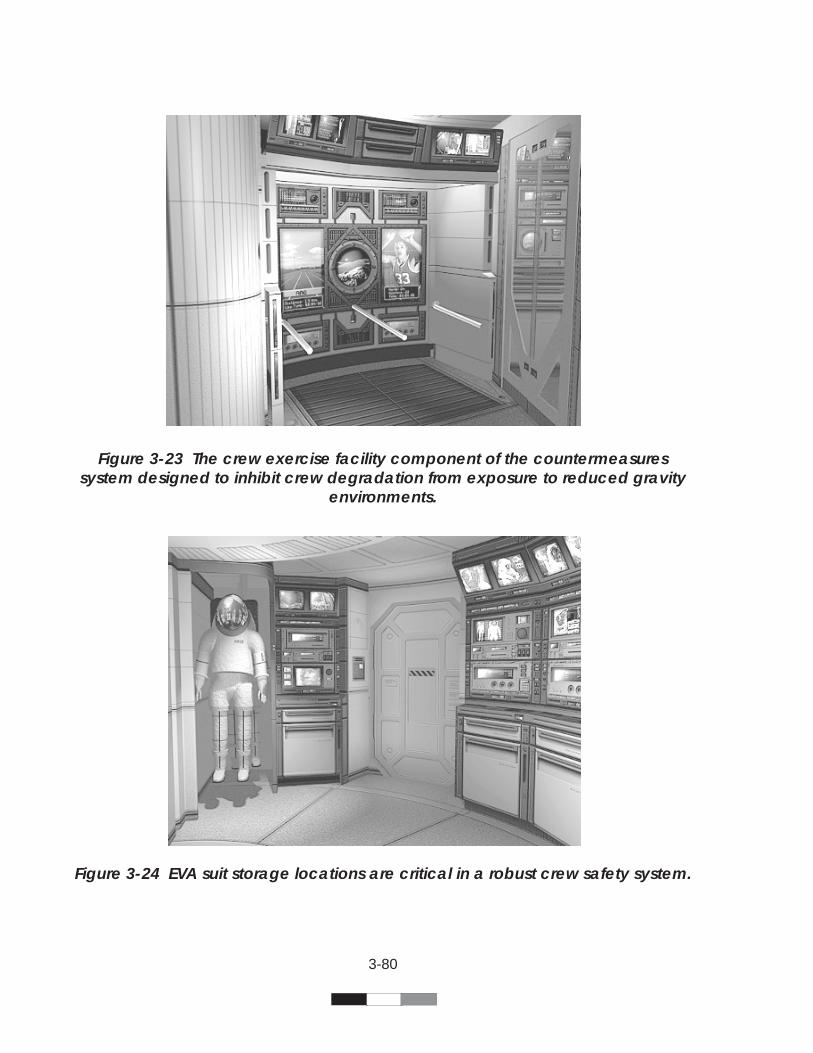
3-80
Figure 3-24 EVA suit storage locations are critical in a robust crew safety system.
Figure 3-23 The crew exercise facility component of the countermeasuressystem designed to inhibit crew degradation from exposure to reduced gravity
environments.
3-81
Figure 3-25 Conceptual Mars habitation module - wardroom design.
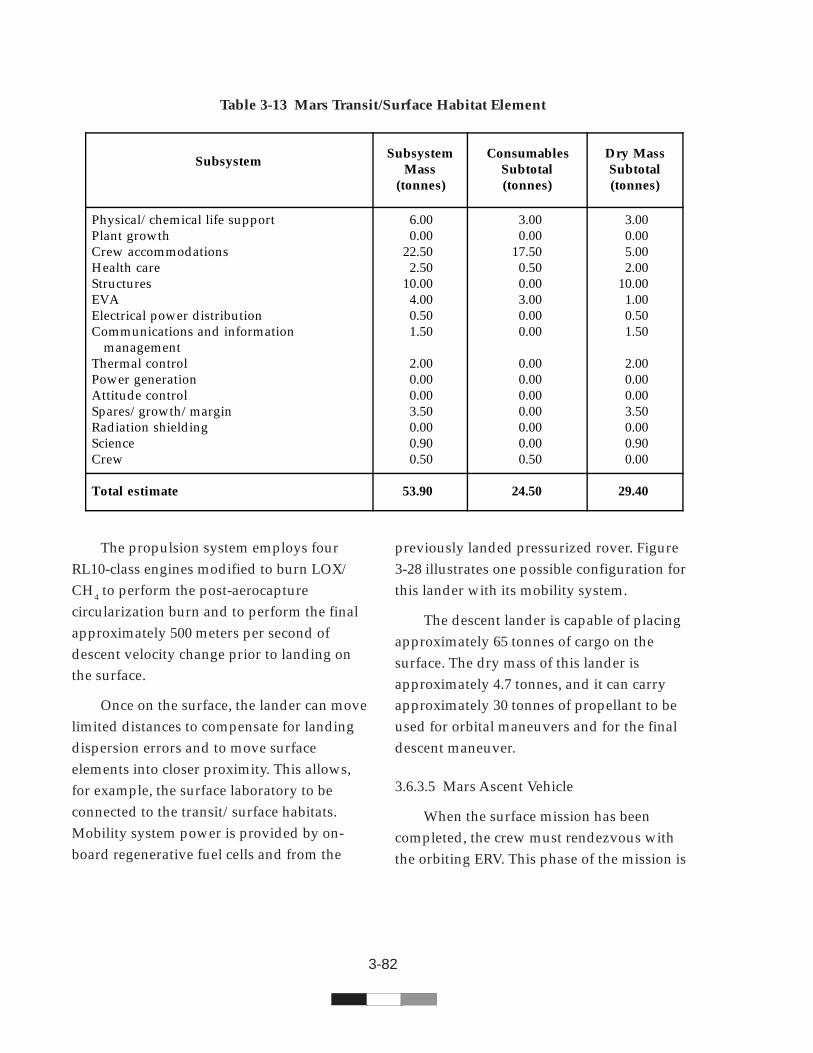
3-82
The propulsion system employs fourRL10-class engines modified to burn LOX/CH4 to perform the post-aerocapturecircularization burn and to perform the finalapproximately 500 meters per second ofdescent velocity change prior to landing onthe surface.
Once on the surface, the lander can movelimited distances to compensate for landingdispersion errors and to move surfaceelements into closer proximity. This allows,for example, the surface laboratory to beconnected to the transit/surface habitats.Mobility system power is provided by on-board regenerative fuel cells and from the
previously landed pressurized rover. Figure3-28 illustrates one possible configuration forthis lander with its mobility system.
The descent lander is capable of placingapproximately 65 tonnes of cargo on thesurface. The dry mass of this lander isapproximately 4.7 tonnes, and it can carryapproximately 30 tonnes of propellant to beused for orbital maneuvers and for the finaldescent maneuver.
3.6.3.5 Mars Ascent Vehicle
When the surface mission has beencompleted, the crew must rendezvous withthe orbiting ERV. This phase of the mission is
Table 3-13 Mars Transit/Surface Habitat Element
SubsystemSubsystem
Mass(tonnes)
ConsumablesSubtotal(tonnes)
Dry MassSubtotal(tonnes)
Physical/chemical life supportPlant growthCrew accommodationsHealth careStructuresEVAElectrical power distributionCommunications and information managementThermal controlPower generationAttitude controlSpares/growth/marginRadiation shieldingScienceCrew
6.000.00
22.502.50
10.004.000.501.50
2.000.000.003.500.000.900.50
3.000.00
17.500.500.003.000.000.00
0.000.000.000.000.000.000.50
3.000.005.002.00
10.001.000.501.50
2.000.000.003.500.000.900.00
Total estimate 53.90 24.50 29.40
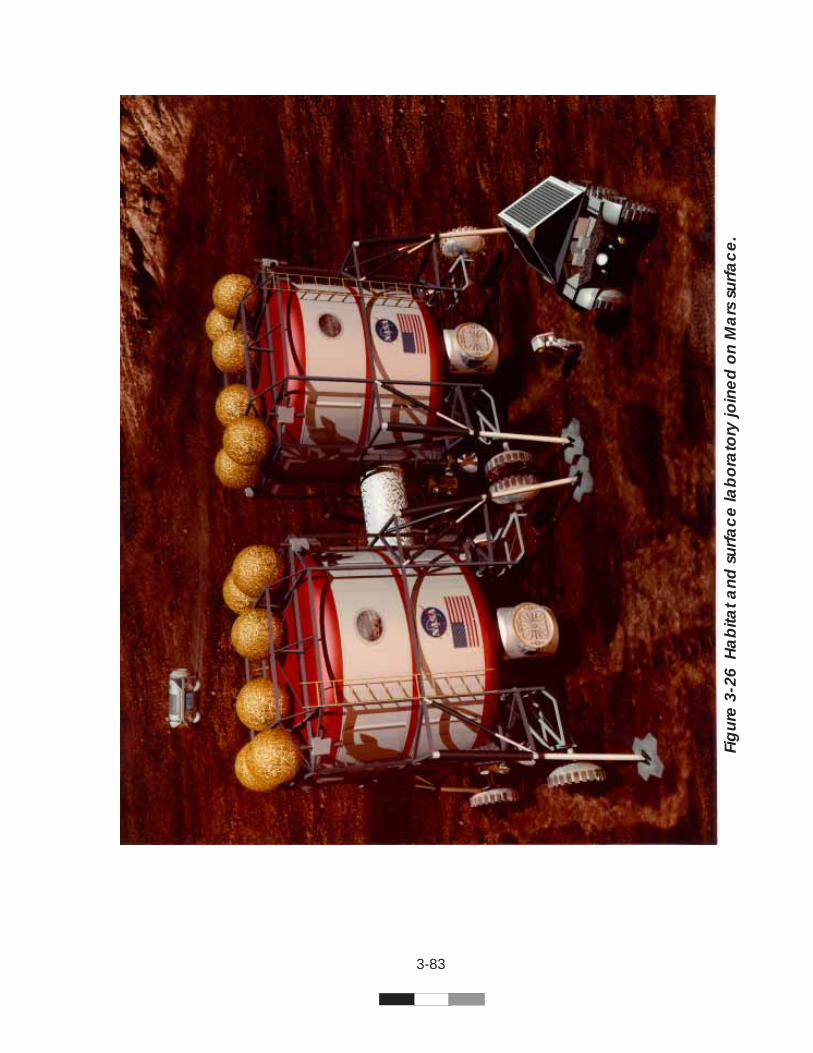
3-83
Fig
ure
3-2
6 H
ab
itat a
nd s
urfa
ce
lab
ora
tory
join
ed
on
Ma
rs s
urfa
ce
.
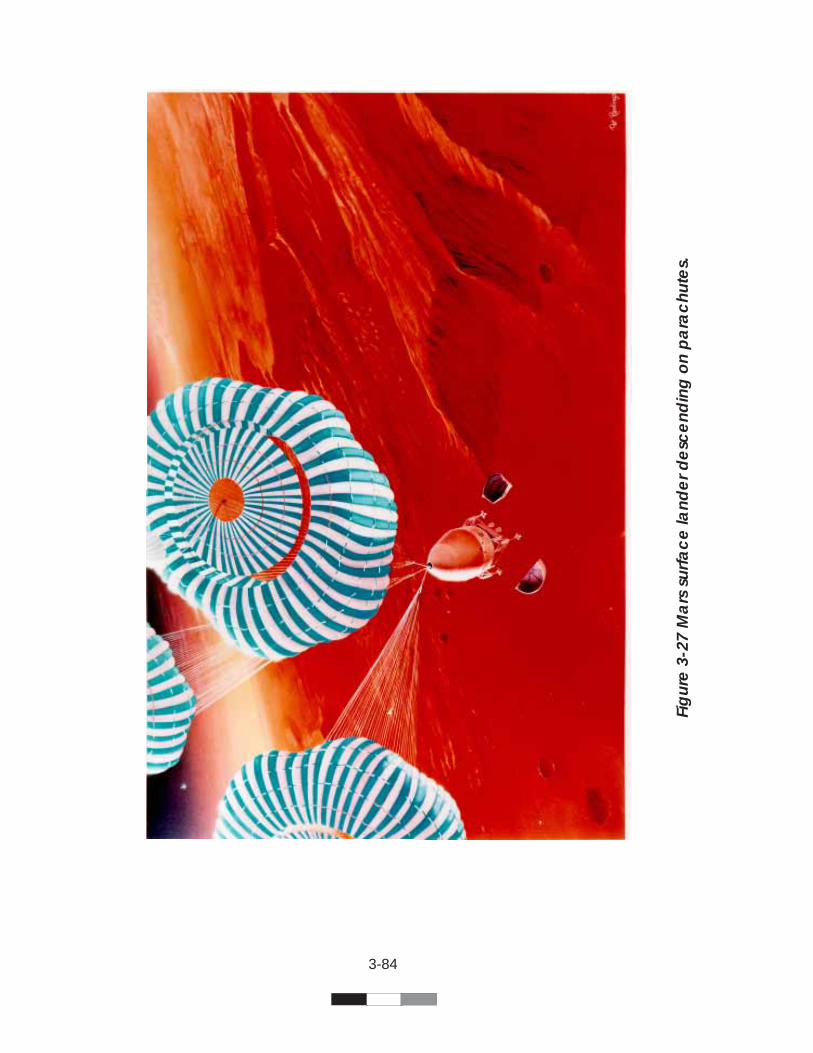
3-84
Fig
ure
3-2
7 M
ars
sur
fac
e la
nde
r de
sce
ndin
g o
n p
ara
chu
tes.
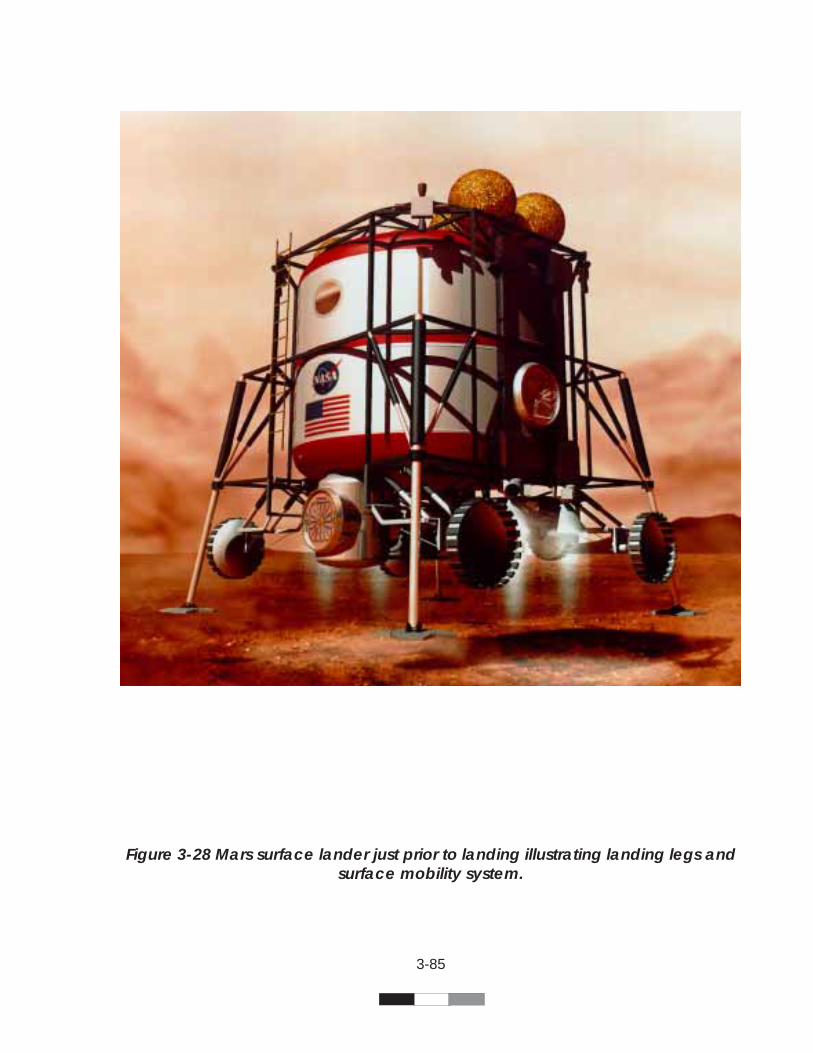
3-85
Figure 3-28 Mars surface lander just prior to landing illustrating landing legs andsurface mobility system.

3-86
accomplished by the MAV which consists ofan ascent propulsion system and the crewascent capsule.
The MAV is delivered to the Mars surfaceatop a cargo descent stage (Figure 3-29illustrates the MAV inside the biconicaeroshell and deployed on the surface). Theascent propulsion system is delivered with itspropellant tanks empty. However, the samedescent stage also delivers a nuclear powersource, a propellant manufacturing plant(both discussed in later sections), and severaltanks of hydrogen to be used as feedstock formaking the required ascent propellant. Thisapproach was chosen because the mass of thepower source, manufacturing plant, and seedhydrogen is less than the mass of thepropellant required by the ascent stage toreach orbit (Stancati, et al., 1979; Jacobs, et al.,1991; Zubrin, et al., 1991). Not carrying thispropellant from Earth gave the ReferenceMission the flexibility to send more surfaceequipment to Mars or to use smaller launchvehicles or some combination of the twooptions.
The crew rides into orbit in the crewascent capsule (Figure 3-30). This pressurizedvehicle can accommodate the crew of six,their EVA suits, and the samples gatheredduring the expedition and from experimentsconducted in the surface habitat/laboratory.Life support systems are designed for therelatively short flight to the waiting ERV. Thisascent capsule does not have a heat shield, asit is not intended for reentering theatmosphere of Earth or Mars. Once the
rendezvous has been completed and all crew,equipment, and samples have beentransferred to the ERV, the MAV is jettisonedand remains in orbit around Mars.
The MAV is depicted in Figure 3-31showing basic dimensions for the vehicle. Theascent propulsion system will requireapproximately 26 tonnes of propellant toaccomplish the nearly 5,600 meters persecond of velocity change required for asingle-stage ascent to orbit and rendezvouswith the previously deployed ERV. Thestructure and tankage needed for thispropellant and the other attached hardwareelements have a mass of 2.6 tonnes, includingthe mass of the engines but not the crewcapsule. The ascent propulsion system usestwo RL10-class engines modified to burnLOX/CH4. These engines perform with anaverage specific impulse of 379 secondsthroughout the MAV flight regime.
The ascent crew capsule has a maximumdiameter of 4 meters, a maximum height of2.5 meters, and a mass of 2.8 tonnes. Thiscapsule contains the basic crew life supportsystems and all guidance and navigationequipment for the rendezvous with the ERV.
3.6.3.6 Earth-Return Vehicle
Returning the crew from Mars orbit toEarth is accomplished by the ERV which iscomposed of the TEI stage, the Earth-returntransit habitat, and the ECCV. The ERV isdelivered to Mars orbit with the TEI stagefully fueled, and it loiters there for nearly 4years before being used by the crew returning
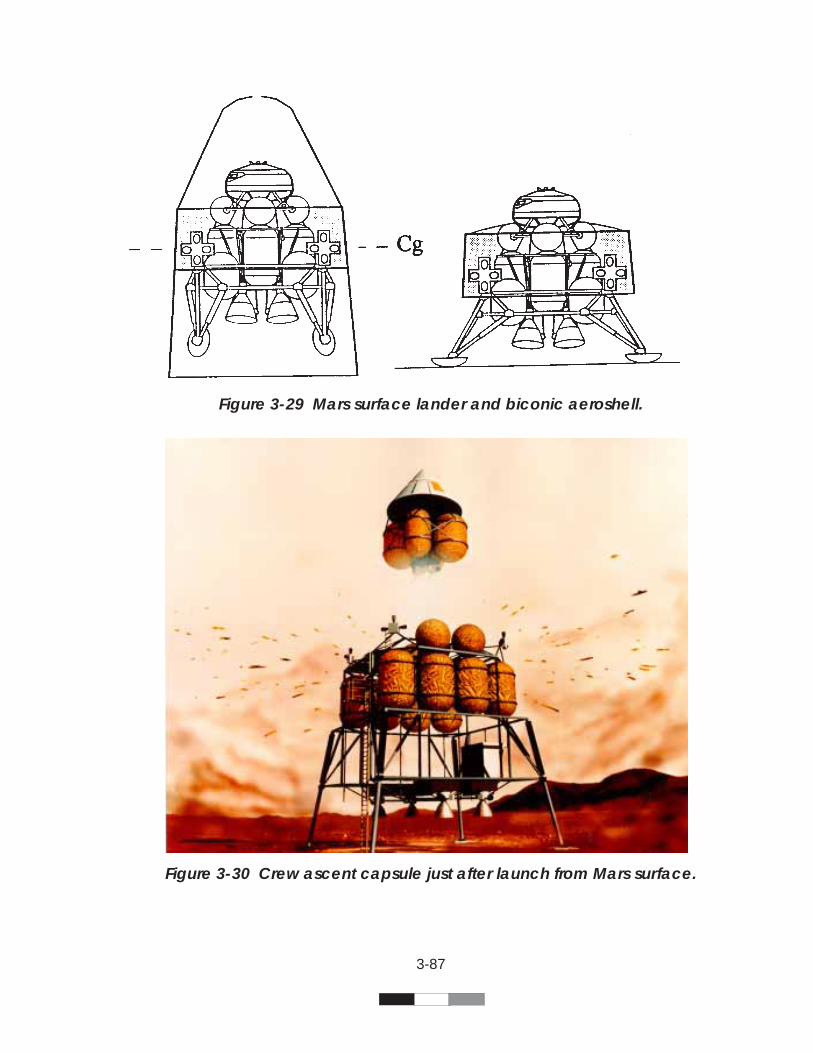
3-87
Figure 3-29 Mars surface lander and biconic aeroshell.
Figure 3-30 Crew ascent capsule just after launch from Mars surface.
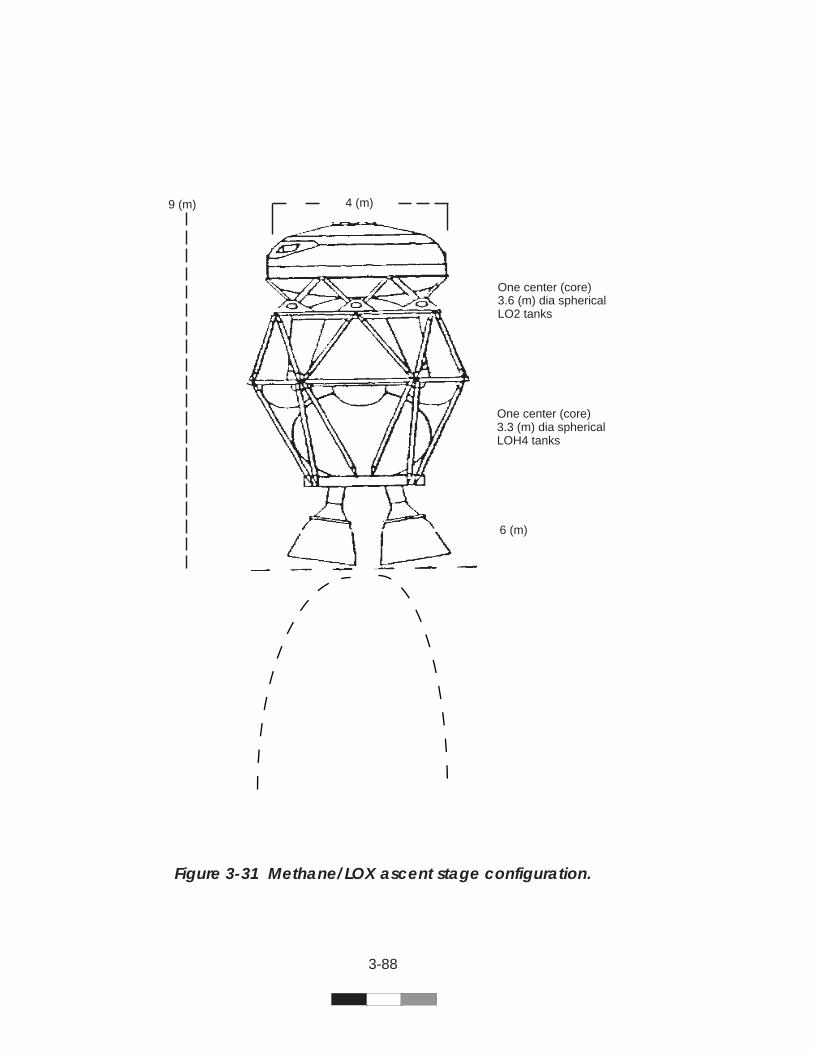
3-88
Figure 3-31 Methane/LOX ascent stage configuration.
9 (m)
6 (m)
4 (m)
One center (core)3.6 (m) dia sphericalLO2 tanks
One center (core)3.3 (m) dia sphericalLOH4 tanks

3-89
to Earth. For the return to Earth, the crew willjettison the MAV and wait for the appropriatedeparture time to leave the parking orbit.During the 180-day return trip, the crew willrecondition themselves as much as possiblefor the return to an Earth gravityenvironment, train for those procedures theywill use during the entry phase, performscience experiments and maintenance tasks,and prepare reports. As they approach Earth,the crew will transfer to the ECCV, along withthe samples they are returning, and separatefrom the remainder of the ERV. The TEI stageand the transit habitat will fly by Earth andcontinue on into deep space. The crew in theECCV will deflect their trajectory slightly sothat they reenter the Earth’s atmosphere andland on the surface.
The propulsion system for the ERV issized for the velocity change needed to movethe Earth return habitat and the ECCV fromthe highly elliptical parking orbit at Mars tothe fast-transit return trajectory to Earth. Aswith the TMI stage, the energeticallydemanding 2011 return trajectory was used tosize this system for a 180-day return; lessenergetically demanding returns could beaccomplished faster or with larger returnpayloads.
Several propellant and enginecombinations were considered by the MarsStudy Team for the TEI propulsion system.The two options given the most considerationwere liquid hydrogen with a NERVAderivative engine comparable to the TMI
stage, and liquid oxygen/liquid methanewith the same engine used by the lander andthe MAV. With the 4-year loiter time in Marsorbit, propellant boiloff was the major designconsideration. Liquid hydrogen wouldrequire active refrigeration for this extendedperiod in orbit to avoid excessive boilofflosses. Liquid oxygen/liquid methane boilofflosses could be held to acceptable levels usingpassive insulation and appropriateorientation of the vehicle while in Mars orbit(to minimize radiative heat input from Mars,the largest source). The 30 kWe solar powersystem (used primarily for powering the ERVon the return to Earth) is also on board andcould be used for active cooling of thesepropellants. Based primarily on this trade-off,liquid oxygen and liquid methane werechosen as the TEI stage propellants.
With this selection, the TEI propulsionsystem uses two RL10-class engines modifiedto burn LOX/CH4. Again, these are the sameengines developed for the ascent and descentstages, thereby reducing engine developmentcosts and improving maintainability. Toachieve the velocity change for the 2011 fast-transit return requires approximately 52tonnes of liquid oxygen and liquid methane.The remainder of the TEI propulsion system,including tanks, structure, engines, andreaction control systems, has a dry mass ofapproximately 5.2 tonnes.
The return habitat is a duplicate of theoutbound transit/surface habitat used to goto Mars but without the stores of consumables

3-90
in the surface habitat. As with the surfacehabitats, the primary structure of this habitatconsists of a cylinder 7.5 meters in diameterand 4.6 meters long with two elliptical endcaps (overall length of 7.5 meters). Theinternal volume will be divided into twolevels, oriented so that each “floor” will be acylinder 7.5 meters in diameter andapproximately 3 meters in height. Theprimary and secondary structure, windows,hatches, docking mechanisms, powerdistribution systems, life support,environmental control, safety features,stowage, waste management,communications, airlock function and crewegress routes will be identical to the otherhabitation elements. Table 3-14 details themass estimate for this habitat module.
The ECCV is similar in concept to theApollo Command Module and is eventuallyused by the crew to enter the Earth’satmosphere and deliver the crew to a safelanding on land. The ECCV will have thenecessary heat shield for Earth reentry andwill be heavier than the ascent capsulespecialized only for that portion of themission. This vehicle has all of the lifesupport, guidance and navigation, andpropulsion systems to keep the crew alive forseveral days and to maneuver the vehicle intothe proper entry trajectory. Once the reentryphase has been completed, the ECCV will usea steerable parafoil to land at a designatedlocation on the surface (Figure 3-32). TheECCV has an estimated mass of 5.5 tonnes.
3.6.3.7 Interplanetary Transportation PowerSystems
A source of power will be required for allof the interplanetary transportation systemsduring the flight times to and, in the case ofthe ERV, from Mars. While several alternativesare available as a primary source of power forthese vehicles, solar energy is readilyavailable throughout these transit phases andphotovoltaic energy is a known technology.Thus, a basic photovoltaic power capability isassumed for those vehicles that are operatingin interplanetary space. A source of storedpower will also be needed for theinterplanetary vehicles during periods ofeclipse and of array retraction prior to captureinto Mars orbit, and for vehicles not typicallyoperating in interplanetary space (such as theMars surface lander, the MAV, and the ECCV).During the eclipse periods and for the othervehicles, a regenerative fuel cell (RFC) systemwill be used to provide necessary power.
The most significant power requirementsfor the interplanetary transportation systemcome from the transit/surface habitat and theERV. Table 3-15 shows the estimated powerrequirements to support the six-person crewfor both nominal and powerdown emergencymode. The life support system is a majorconstituent of the almost 30 kWe needed forthese two vehicles under nominal conditions.The life support system is based on a partiallyclosed air and water system design that per-forms CO2 reduction, O2 and N2 generation,urine processing, and water processing(potable and hygiene). The emergency mode
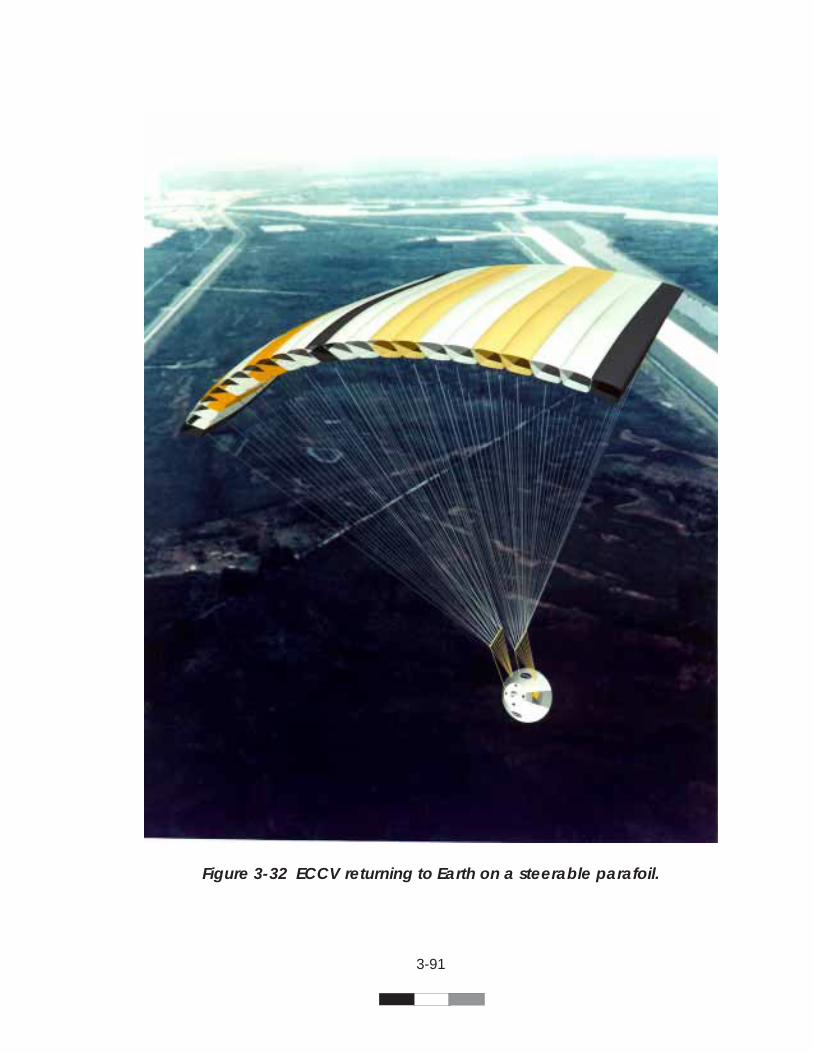
3-91
Figure 3-32 ECCV returning to Earth on a steerable parafoil.
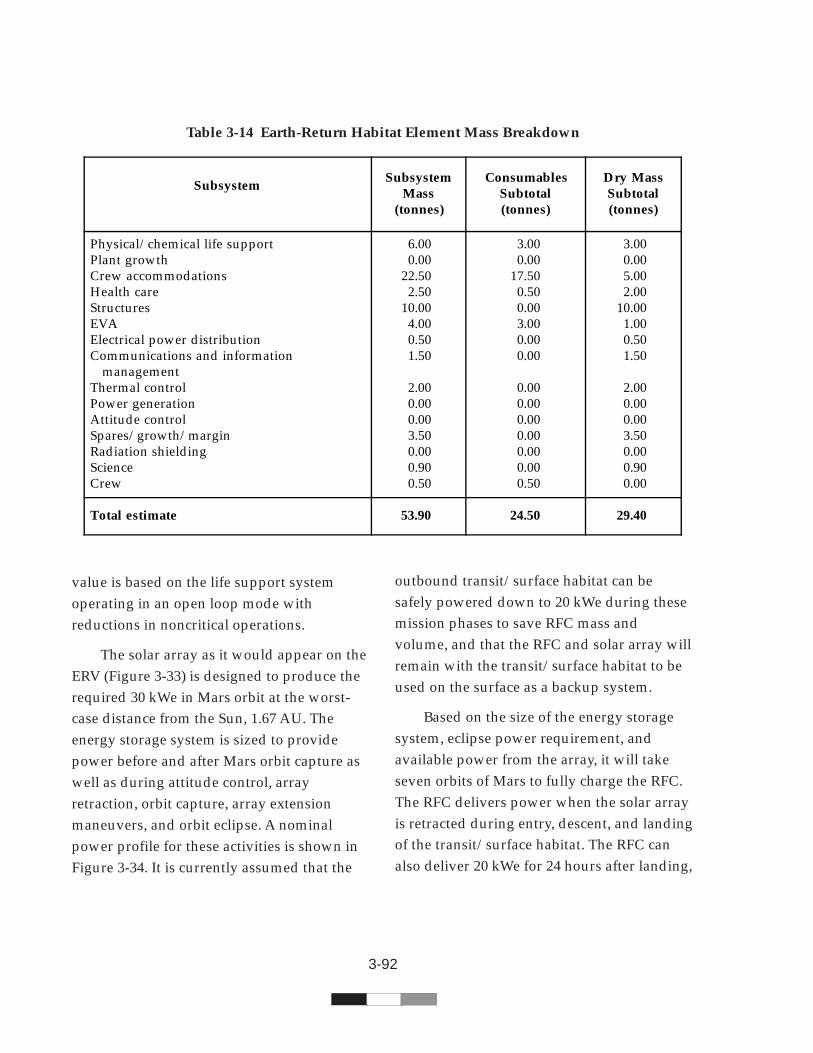
3-92
value is based on the life support systemoperating in an open loop mode withreductions in noncritical operations.
The solar array as it would appear on theERV (Figure 3-33) is designed to produce therequired 30 kWe in Mars orbit at the worst-case distance from the Sun, 1.67 AU. Theenergy storage system is sized to providepower before and after Mars orbit capture aswell as during attitude control, arrayretraction, orbit capture, array extensionmaneuvers, and orbit eclipse. A nominalpower profile for these activities is shown inFigure 3-34. It is currently assumed that the
outbound transit/surface habitat can besafely powered down to 20 kWe during thesemission phases to save RFC mass andvolume, and that the RFC and solar array willremain with the transit/surface habitat to beused on the surface as a backup system.
Based on the size of the energy storagesystem, eclipse power requirement, andavailable power from the array, it will takeseven orbits of Mars to fully charge the RFC.The RFC delivers power when the solar arrayis retracted during entry, descent, and landingof the transit/surface habitat. The RFC canalso deliver 20 kWe for 24 hours after landing,
Table 3-14 Earth-Return Habitat Element Mass Breakdown
SubsystemSubsystem
Mass(tonnes)
ConsumablesSubtotal(tonnes)
Dry MassSubtotal(tonnes)
Physical/chemical life supportPlant growthCrew accommodationsHealth careStructuresEVAElectrical power distributionCommunications and information managementThermal controlPower generationAttitude controlSpares/growth/marginRadiation shieldingScienceCrew
6.000.00
22.502.50
10.004.000.501.50
2.000.000.003.500.000.900.50
3.000.00
17.500.500.003.000.000.00
0.000.000.000.000.000.000.50
3.000.005.002.00
10.001.000.501.50
2.000.000.003.500.000.900.00
Total estimate 53.90 24.50 29.40
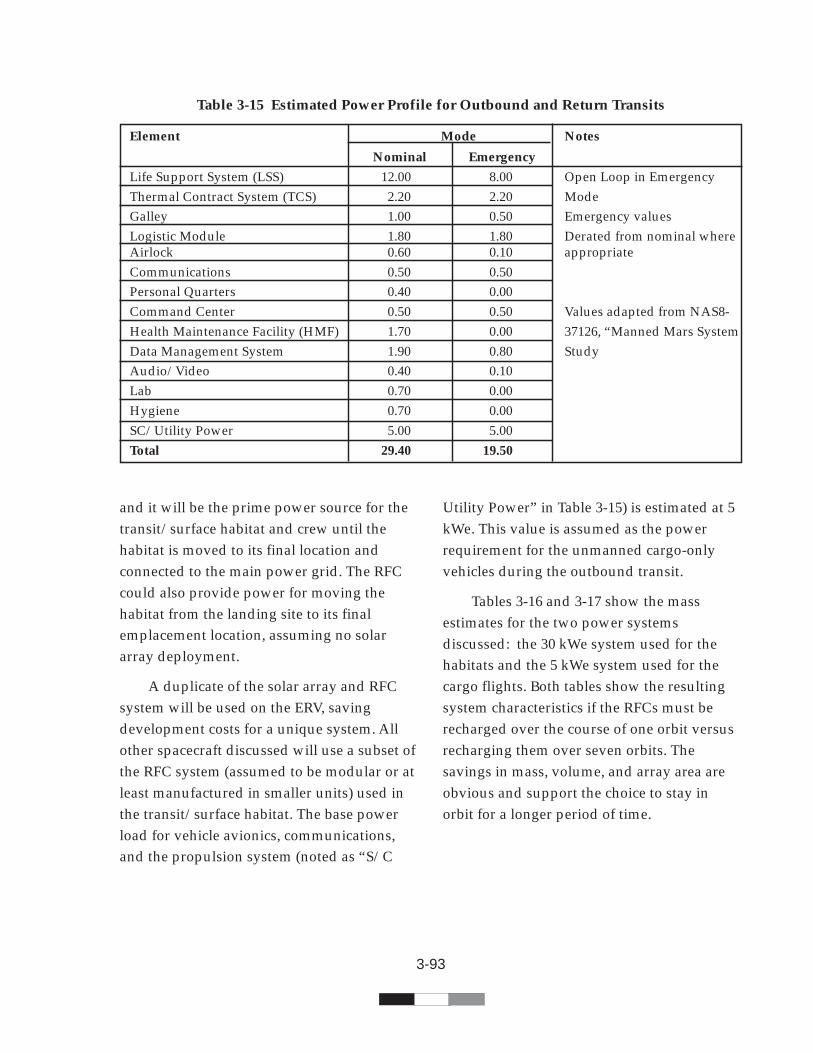
3-93
and it will be the prime power source for thetransit/surface habitat and crew until thehabitat is moved to its final location andconnected to the main power grid. The RFCcould also provide power for moving thehabitat from the landing site to its finalemplacement location, assuming no solararray deployment.
A duplicate of the solar array and RFCsystem will be used on the ERV, savingdevelopment costs for a unique system. Allother spacecraft discussed will use a subset ofthe RFC system (assumed to be modular or atleast manufactured in smaller units) used inthe transit/surface habitat. The base powerload for vehicle avionics, communications,and the propulsion system (noted as “S/C
Utility Power” in Table 3-15) is estimated at 5kWe. This value is assumed as the powerrequirement for the unmanned cargo-onlyvehicles during the outbound transit.
Tables 3-16 and 3-17 show the massestimates for the two power systemsdiscussed: the 30 kWe system used for thehabitats and the 5 kWe system used for thecargo flights. Both tables show the resultingsystem characteristics if the RFCs must berecharged over the course of one orbit versusrecharging them over seven orbits. Thesavings in mass, volume, and array area areobvious and support the choice to stay inorbit for a longer period of time.
Table 3-15 Estimated Power Profile for Outbound and Return Transits
Element Mode Notes
Nominal Emergency
Life Support System (LSS) 12.00 8.00 Open Loop in EmergencyThermal Contract System (TCS) 2.20 2.20 ModeGalley 1.00 0.50 Emergency valuesLogistic Module 1.80 1.80 Derated from nominal whereAirlock 0.60 0.10 appropriateCommunications 0.50 0.50Personal Quarters 0.40 0.00Command Center 0.50 0.50 Values adapted from NAS8-Health Maintenance Facility (HMF) 1.70 0.00 37126, “Manned Mars SystemData Management System 1.90 0.80 StudyAudio/Video 0.40 0.10Lab 0.70 0.00Hygiene 0.70 0.00SC/Utility Power 5.00 5.00Total 29.40 19.50
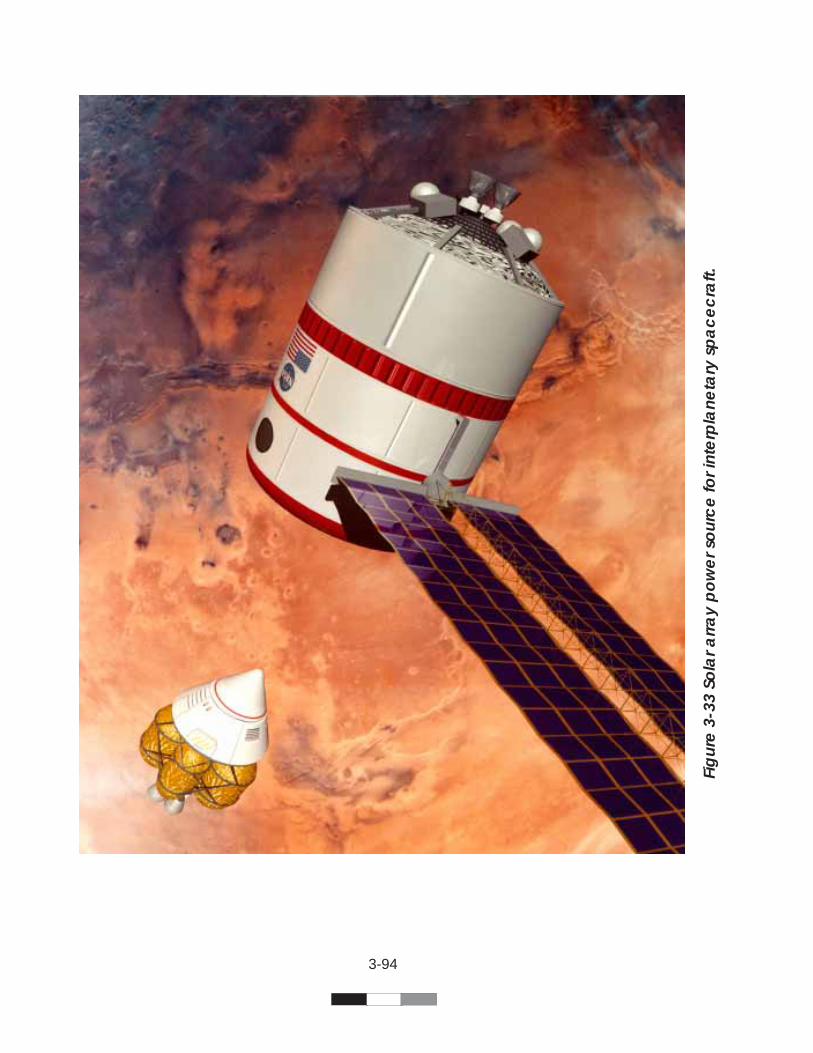
3-94
Fig
ure
3-3
3 So
lar a
rra
y p
ow
er s
our
ce
for i
nte
rpla
neta
ry s
pa
ce
cra
ft.
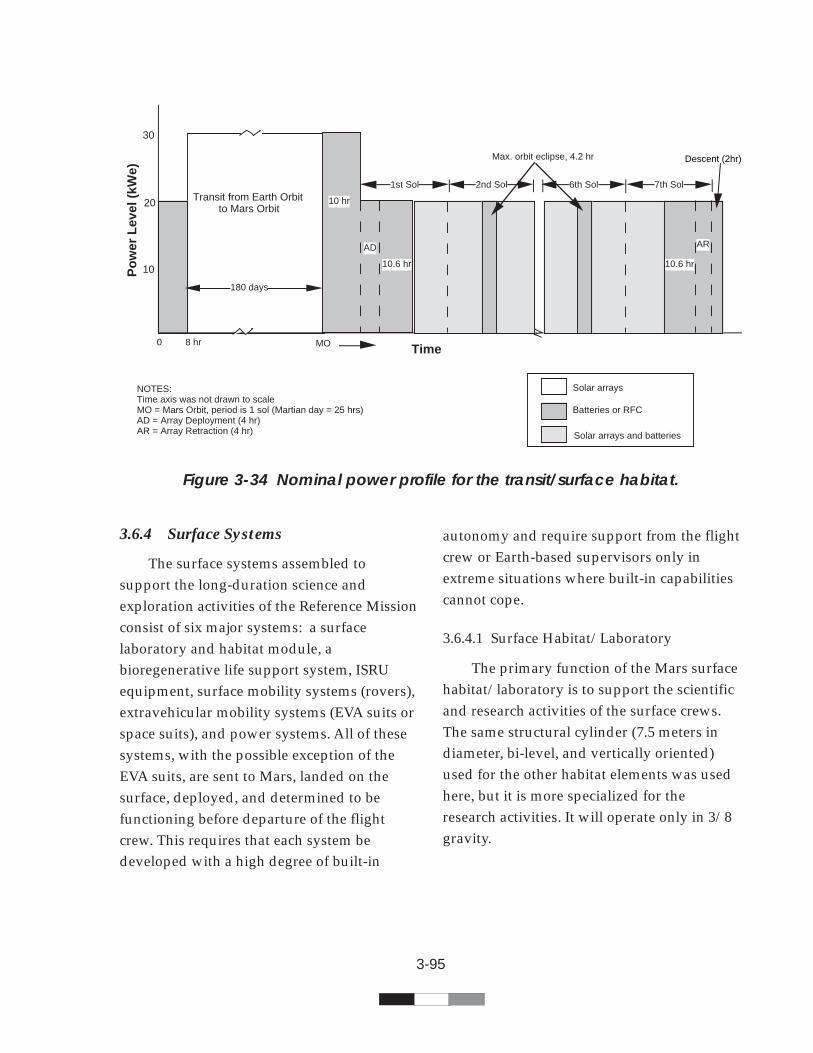
3-95
3.6.4 Surface Systems
The surface systems assembled tosupport the long-duration science andexploration activities of the Reference Missionconsist of six major systems: a surfacelaboratory and habitat module, abioregenerative life support system, ISRUequipment, surface mobility systems (rovers),extravehicular mobility systems (EVA suits orspace suits), and power systems. All of thesesystems, with the possible exception of theEVA suits, are sent to Mars, landed on thesurface, deployed, and determined to befunctioning before departure of the flightcrew. This requires that each system bedeveloped with a high degree of built-in
autonomy and require support from the flightcrew or Earth-based supervisors only inextreme situations where built-in capabilitiescannot cope.
3.6.4.1 Surface Habitat/Laboratory
The primary function of the Mars surfacehabitat/laboratory is to support the scientificand research activities of the surface crews.The same structural cylinder (7.5 meters indiameter, bi-level, and vertically oriented)used for the other habitat elements was usedhere, but it is more specialized for theresearch activities. It will operate only in 3/8gravity.
Figure 3-34 Nominal power profile for the transit/surface habitat.
NOTES:Time axis was not drawn to scaleMO = Mars Orbit, period is 1 sol (Martian day = 25 hrs)AD = Array Deployment (4 hr)AR = Array Retraction (4 hr)
Descent (2hr)
Time
Po
wer
Lev
el (
kWe)
20
30
0 8 hr
180 days
Solar arrays
Batteries or RFC
Solar arrays and batteries
Transit from Earth Orbit to Mars Orbit
10 hr
1st Sol 2nd Sol
Max. orbit eclipse, 4.2 hr
AD
7th Sol
10.6 hr
AR
10.6 hr
6th Sol
MO
10
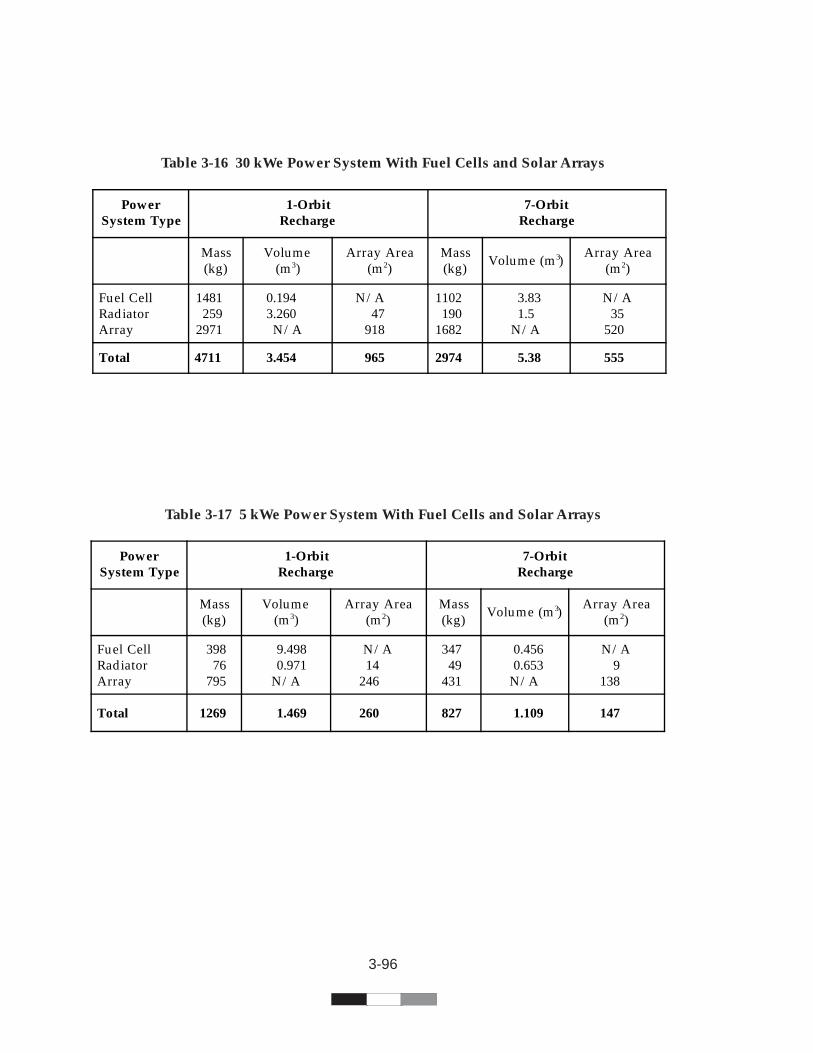
3-96
Table 3-16 30 kWe Power System With Fuel Cells and Solar Arrays
PowerSystem Type
1-OrbitRecharge
7-OrbitRecharge
Mass(kg)
Volume(m3)
Array Area(m2)
Mass(kg) Volume (m3) Array Area
(m2)
Fuel CellRadiatorArray
1481259
2971
0.1943.260N/A
N/A47
918
1102190
1682
3.831.5
N/A
N/A35
520
Total 4711 3.454 965 2974 5.38 555
Table 3-17 5 kWe Power System With Fuel Cells and Solar Arrays
PowerSystem Type
1-OrbitRecharge
7-OrbitRecharge
Mass(kg)
Volume(m3)
Array Area(m2)
Mass(kg) Volume (m3) Array Area
(m2)
Fuel CellRadiatorArray
39876
795
9.4980.971
N/A
N/A14
246
34749
431
0.4560.653
N/A
N/A9
138
Total 1269 1.469 260 827 1.109 147

3-97
This surface habitat/laboratory will beone of the first elements landed on the surfaceof Mars. Once moved to a suitable location(should the actual landing site proveunsuitable or to accommodate otheroperational needs), this facility will beconnected to the surface power systems andall internal subsystems will be activated. Onlyafter these internal subsystems and otherlanded surface systems have been verified tobe operating satisfactorily will the first crewbe launched from Earth.
The surface habitat/laboratory contains alarge stowage area on the first level and thesecond level is devoted entirely to theprimary science and research laboratory. Thestowage area will initially containnonperishable consumables that can be sentto the surface prior to the arrival of the firstcrew. As these consumables are used, thisspace will become available for other uses—likely to be plant growth and greenhouse-type experiments. The other subsystems ofthis module, such as the primary andsecondary structure, windows, hatches,docking mechanisms, power distributionsystems, life support, environmental control,safety features, stowage, waste management,communications, airlock function, and crewegress routes, will be identical to the otherhabitats with a few exceptions. No crewquarters or accommodations will be includedin this module except for a minimal galleyand minimal waste management facility.However, the life support subsystem will becapable of supporting the entire crew shouldit become necessary for the crew to spend
extended periods of time in the habitat/laboratory. The primary airlock for EVAactivities will be located in this module (withbackup capability in one of the other habitatmodules) with an EVA suit maintenance andcharging station located near the airlock.Table 3-18 details the estimated mass for thismodule.
3.6.4.2 Life Support System
An important reason for sending humansto live on and explore Mars is to determinewhether human life is capable of survivingand working productively there. The lifesupport system (LSS) for a Mars surfacemission will be an integral part of the missionarchitecture, and must be viewed in terms ofits requirements to maintain the health andsafety of the crew and its capability tominimize the dependence of a Mars outposton materials supplied from Earth. Provingthat human, and by extension animal andplant, life can inhabit another world andbecome self-sufficient and productive will bea major objective of this LSS.
Four options were examined for use asthe LSS for the Mars surface facilities: openloop, physical/chemical, bioregenerative, andcached stocks of consumable materials.
•The open loop option is the simplest toimplement but typically the most expensivein terms of the mass required. For this option,life support materials are constantlyreplenished from stored supplies as they areused (for example, as air is breathed by thecrew, it is dumped overboard and replaced
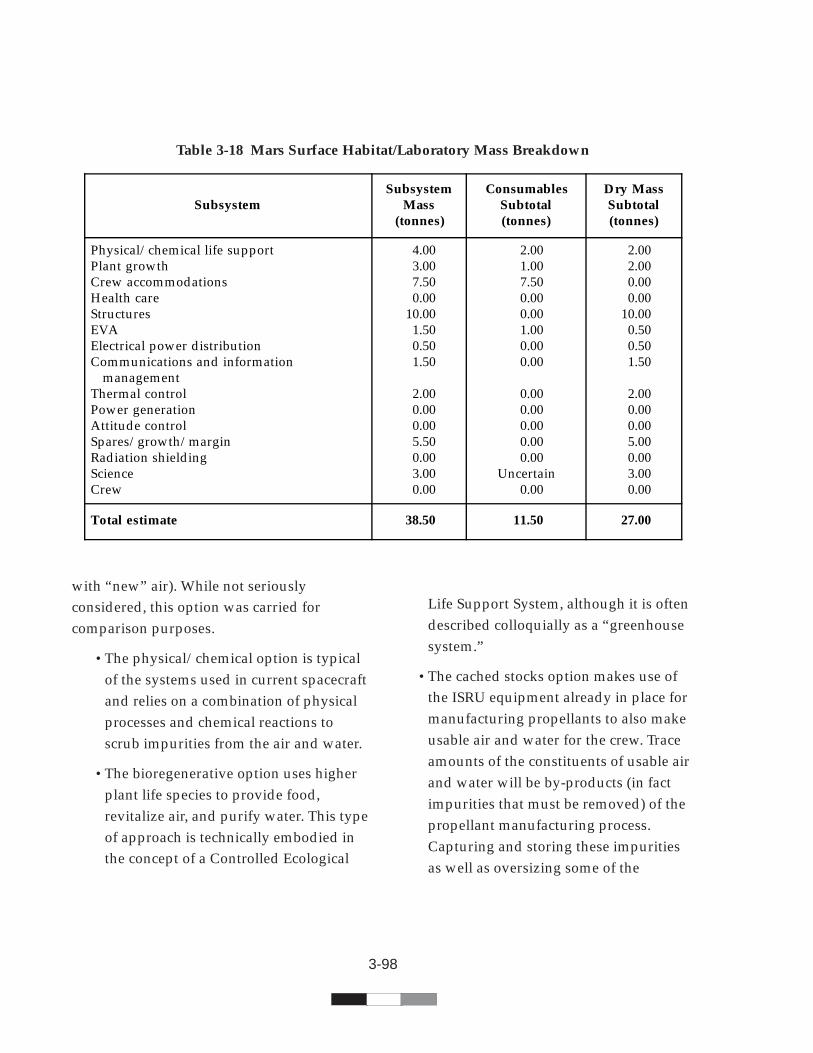
3-98
with “new” air). While not seriouslyconsidered, this option was carried forcomparison purposes.
•The physical/chemical option is typicalof the systems used in current spacecraftand relies on a combination of physicalprocesses and chemical reactions toscrub impurities from the air and water.
•The bioregenerative option uses higherplant life species to provide food,revitalize air, and purify water. This typeof approach is technically embodied inthe concept of a Controlled Ecological
Life Support System, although it is oftendescribed colloquially as a “greenhousesystem.”
•The cached stocks option makes use ofthe ISRU equipment already in place formanufacturing propellants to also makeusable air and water for the crew. Traceamounts of the constituents of usable airand water will be by-products (in factimpurities that must be removed) of thepropellant manufacturing process.Capturing and storing these impuritiesas well as oversizing some of the
Table 3-18 Mars Surface Habitat/Laboratory Mass Breakdown
SubsystemSubsystem
Mass(tonnes)
ConsumablesSubtotal(tonnes)
Dry MassSubtotal(tonnes)
Physical/chemical life supportPlant growthCrew accommodationsHealth careStructuresEVAElectrical power distributionCommunications and information managementThermal controlPower generationAttitude controlSpares/growth/marginRadiation shieldingScienceCrew
4.003.007.500.00
10.001.500.501.50
2.000.000.005.500.003.000.00
2.001.007.500.000.001.000.000.00
0.000.000.000.000.00
Uncertain0.00
2.002.000.000.00
10.000.500.501.50
2.000.000.005.000.003.000.00
Total estimate 38.50 11.50 27.00

3-99
production processes can allow the crewto at least augment other elements of theLSS.
Combinations and hybrids of theseoptions are also possible and were alsoexamined for this report. Using a combinationof systems or a hybrid system would providemore levels of functional redundancy andthus provide an attractive option forenhancing the viability of the Mars surfacefacilities as a safe haven. Figure 3-35illustrates a hybrid system using physical/chemical and bioregenerative elements.
In this example, certain life supportfunctions, such as CO2 reduction and waterpurification, can be shared by both elements,while other functions, such as fresh foodproduction, can only come from thegreenhouse. As an integrated system, neitherelement needs to provide 100 percent of thefull life support demand on a continuousbasis. Both elements however, should becapable of being periodically throttled tosatisfy from 0 percent to 100 percent of theLSS load.
The Reference Mission adopted thephilosophy that life-critical systems (thosesystems absolutely essential to ensure thecrew’s survival) should have two backuplevels of functional redundancy. That is, if thefirst two levels fail, the crew will not be injeopardy, but will not be able to complete allmission objectives. As previously discussed,each habitat is equipped with a physical/chemical LSS capable of providing for theentire crew for the duration of their surface
stay. A physical/chemical system was chosendue to the mature nature of the technology.Thus, the first habitat and the surfacelaboratory constitute the primary and firstbackup (although not strictly a functional butrather a redundant backup) for the crew lifesupport.
It is highly desirable for the secondbackup to use indigenous resources so thatthe backup life support objective and the liveoff the land objective are both met. Table 3-19compares the various options for thecombined LSSs with an open system. Each ofthese options was sized for a crew of sixspending 600 days on the martian surface.
Because of the life-critical nature of thepropellant manufacturing facility and thehigh level of reliability that must be designedinto this system, the cached stocks option waschosen as the second backup. However,demonstrating the capability to producefoodstuffs and revitalize air and water usingbioregenerative processes is considered amission-critical objective for the ReferenceMission. For that reason, an experimentalbioregenerative life support system capable ofproducing a small amount of food is includedas a science payload to be delivered for use bythe second crew.
Several options exist for the location ofthe experimental bioregenerative LSS. One isto use the storage space in the surfacehabitat/laboratory that will become availableas consumables are used. This is the simplestto implement but would require artificiallighting and would be restricted to the
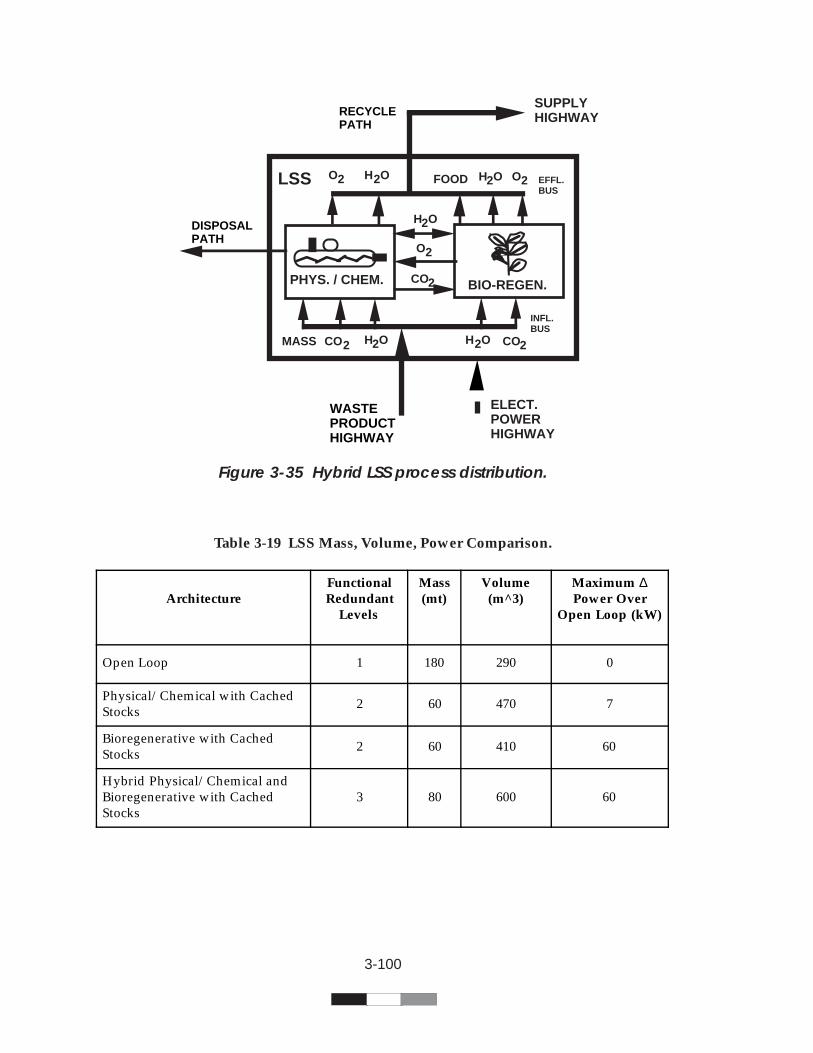
3-100
Figure 3-35 Hybrid LSS process distribution.
SUPPLYHIGHWAY
LSS
WASTEPRODUCTHIGHWAY
DISPOSALPATH
RECYCLEPATH
PHYS. / CHEM. BIO-REGEN.
MASS CO2 H2O CO2
H2O O2O2
ELECT.POWERHIGHWAY
EFFL.BUS
INFL.BUS
H2O FOOD
H2O
H2O
O2
CO2
Table 3-19 LSS Mass, Volume, Power Comparison.
ArchitectureFunctionalRedundant
Levels
Mass(mt)
Volume(m^3)
Maximum ∆Power Over
Open Loop (kW)
Open Loop 1 180 290 0
Physical/Chemical with CachedStocks 2 60 470 7
Bioregenerative with CachedStocks 2 60 410 60
Hybrid Physical/Chemical andBioregenerative with CachedStocks
3 80 600 60

3-101
volume available in the storage area. Twoother options involve attaching an externalpressurized structure to one of the habitatmodules. One external option would use ahard opaque structure for the external shelland would also require artificial lighting. Theother external option would use an inflatabletransparent structure for the external shell.Natural sunlight would be used to illuminatethe plants which would reduce the powerneeded by the system; however, the potentialrisk of a puncture due to natural or human-derived events would be increased.
In either external scheme, the greenhouseatmospheric volumes would normallycommunicate directly with the atmosphericvolume of the habitat without furtherprocessing, but could be sealed off incontingencies. The greenhouse(s) could beerected or inflated at the convenience of thecrew. The loss of a greenhouse module forany reason, such as puncture, mechanical orelectrical failure, or loss of shielding integrity,would not seriously impact overall missionsuccess.
3.6.4.3 In Situ Resource Utilization
ISRU for the Reference Mission providestwo basic resources: propellants for the MAVand cached reserves for the LSSs. Usingindigenous resources to satisfy these needsinstead of transporting resources from Earthreduces launch mass and thus mission cost.ISRU production for the Reference Missionincludes two virtually redundant ISRU plants,the first delivered before the initial pilotedmission and the second delivered prior to the
first follow-up mission. Each ISRU plant willproduce propellants for at least two MAVmissions. However, only the first plant isrequired to produce life support caches.
For each MAV mission, a plant isrequired to produce 20 tonnes of oxygen andmethane propellants at a 3.5 to 1 ratio: Eachplant must produce 5.8 tonnes of methaneand 20.2 tonnes of oxygen. Further, the firstISRU system is required to produce 23.2tonnes of water, 4.5 tonnes of breathingoxygen, and 3.9 tonnes of nitrogen/argoninert buffer gasses for use by any of the threeMars crews. The system liquefies and storesall of these materials as redundant lifesupport reserves or for later use by the MAV.
The approach to ISRU production usesthe martian atmosphere for feedstock andimports hydrogen from Earth. The mainprocesses used are common to both ISRUplants. The significant difference between thetwo is that the second plant is smaller andexcludes equipment for buffer gas extraction.Should sources of indigenous and readilyavailable water be found, this system could besimplified.
3.6.4.3.1 Processes
The Mars atmosphere, which is used as afeedstock resource, is composed primarily ofcarbon dioxide with just over 3 percentnitrogen and argon. The ISRU plants must becapable of converting the carbon dioxide tomethane, oxygen, and water. Since hydrogenis not substantially present in the atmospherein gaseous form and indigenous sources of

3-102
water are uncertain, hydrogen must beimported from Earth. The first plant must alsobe capable of extracting the nitrogen andargon for buffer gas reserves. The referenceISRU system uses Sabatier, water electrolysis,carbon dioxide electrolysis, and buffer gasabsorption processes to achieve these ends.
•Methane production - The Sabatierreaction was discovered by Frenchchemist P. Sabatier in the nineteenthcentury and is one of the most oftencited for ISRU on Mars (Sullivan, et al.,1995). The reaction converts carbon tomethane and water by reacting it withimported hydrogen at elevatedtemperatures. This process is alsocommonly used in closed physical/chemical LSSs for reduction of metaboliccarbon dioxide. It results in a water tomethane mass ratio of 2.25:1 andrequires 0.5 tonnes of hydrogen for eachtonne of methane produced. Theresultant methane is stored cryogenicallyas fuel. The water can either be useddirectly as cached life support reservesor can be broken down into oxygen andhydrogen to be recycled.
•Oxygen production - Oxygen productionis accomplished with two differentprocesses. The Reference Mission usesboth water electrolysis to produceoxygen from water produced in theplant and carbon dioxide electrolysis todirectly convert the Mars atmosphere tooxygen.
Water electrolysis is well known and hasbeen used for numerous terrestrialapplications for many years. The combinedSabatier and electrolysis processes generateoxygen and methane for use as propellants ata mass ratio of 2:1. In this combined processcase, the hydrogen is recycled into theSabatier process so that 0.25 tonnes ofhydrogen are needed for each tonne ofmethane. The engines selected for theReference Mission use oxygen and methane ata mass ratio of 3.5 to 1. Therefore, anadditional source of oxygen is needed toavoid overproduction of methane.
The carbon dioxide electrolysis process isused in the Reference Mission to provide theneeded additional oxygen. The processconverts the atmospheric carbon dioxidedirectly into oxygen and carbon monoxideusing zirconia cells at high temperature. Thezirconia cell system is not as well developedas the Sabatier process but is underdevelopment (Sridhar, et al., 1991; Ramohalli,et al., 1989; and Colvin, et al., 1991). Thisprocess eliminates the overproduction ofmethane during propellant production exceptduring the first mission when the Sabatier-produced water is also needed.
The two strong alternatives to carbondioxide electrolysis—methane pyrolysis andreverse water gas shift—were not studied in-depth for the Reference Mission report, butthey should be considered seriously in furtherstudies of manned Mars missions.

3-103
•Buffer gas extraction - The buffer gasextraction process has not beenexamined in detail during this study. Itwill most likely be a nitrogen and argonabsorption process in which compressedatmosphere is passed over a bed ofmaterial which absorbs the nitrogen andargon. The gases are then released byheating the bed and the products arepassed on to the cooling and storagesystem. Parallel chambers are used sothat one bed is absorbing in the presenceof atmosphere while the other isreleasing its captured gases.
•Ancillary Systems - Systems foratmosphere intake, product liquefaction,and product storage and transfer will beneeded. These systems have not beendetailed for the Reference Mission at thisstage of study but their necessaryfunctions can be described. The filterand compressor equipment cleans themartian atmosphere of dust andcompresses it to a pressure usable by therest of the ISRU plant. Productliquefaction must include cryogenicliquefaction of oxygen, methane andnitrogen as well as condensation of thewater stored as cached reserves. Storagesystems will include cryogenic tanks forcached oxygen and buffer gasses. Anexpandable bladder-type tank isanticipated for cached water. Propellantstorage will be accomplished in the MAVtanks and so is not considered part of theISRU system.
3.6.4.3.2 Initial ISRU Plant
The first ISRU plant is delivered to Marsover a year prior to the first departure ofhumans from Earth, and during that year theplant produces all the propellants and lifesupport caches that will be needed. Thus,humans do not even leave Earth untilreserves and return propellants are available.This plant also produces propellants for theMAV mission of the third crew in the overallReference Mission scenario.
A schematic of this initial plant is shownin Figure 3-36. The plant integrates all theprocesses needed for both propellant and lifesupport products. The water electrolyzer isnot used in the plant during the first period ofoperation. Because of the total mass of thewater cache, all of the water produced by theSabatier reactor is stored and the carbondioxide electrolysis reactor is responsible forproducing all the oxygen needed. In addition,over 10 tonnes of excess methane areproduced as a by-product of the waterproduction process for the LSS cache.
When the plant is operated for the thirdMAV launch propellants, the waterelectrolyzer is brought on-line. Instead ofbeing condensed, the water from the Sabatierreactor is split by the electrolyzer intohydrogen (which is recycled to the Sabatierreactor) and oxygen (which is liquefied andsent to the MAV tanks). For this operation ofthe plant, no methane overproduction isneeded.
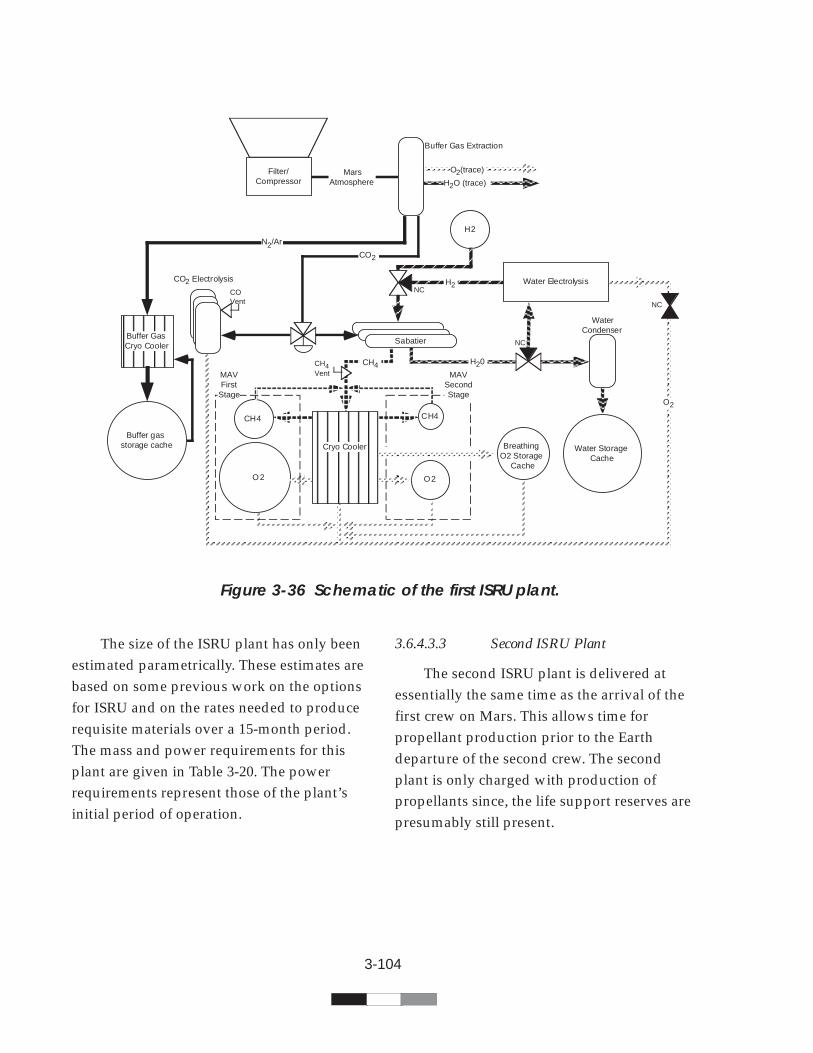
3-104
The size of the ISRU plant has only beenestimated parametrically. These estimates arebased on some previous work on the optionsfor ISRU and on the rates needed to producerequisite materials over a 15-month period.The mass and power requirements for thisplant are given in Table 3-20. The powerrequirements represent those of the plant’sinitial period of operation.
3.6.4.3.3 Second ISRU Plant
The second ISRU plant is delivered atessentially the same time as the arrival of thefirst crew on Mars. This allows time forpropellant production prior to the Earthdeparture of the second crew. The secondplant is only charged with production ofpropellants since, the life support reserves arepresumably still present.
H2O (trace)
H20
Filter/Compressor
Buffer Gas Extraction
Sabatier
Buffer gasstorage cache
O2O2
CH4
Water StorageCache
CO2 Electrolysis
WaterCondenser
CO2
CH4
O2
BreathingO2 Storage
Cache
H2
MarsAtmosphere
N2/Ar
H2
NC
NC
NC
Water Electrolysis
O2(trace)
Buffer GasCryo Cooler
CH4Vent
CH4
COVent
MAVFirst
Stage
MAVSecondStage
Cryo Cooler
Figure 3-36 Schematic of the first ISRU plant.
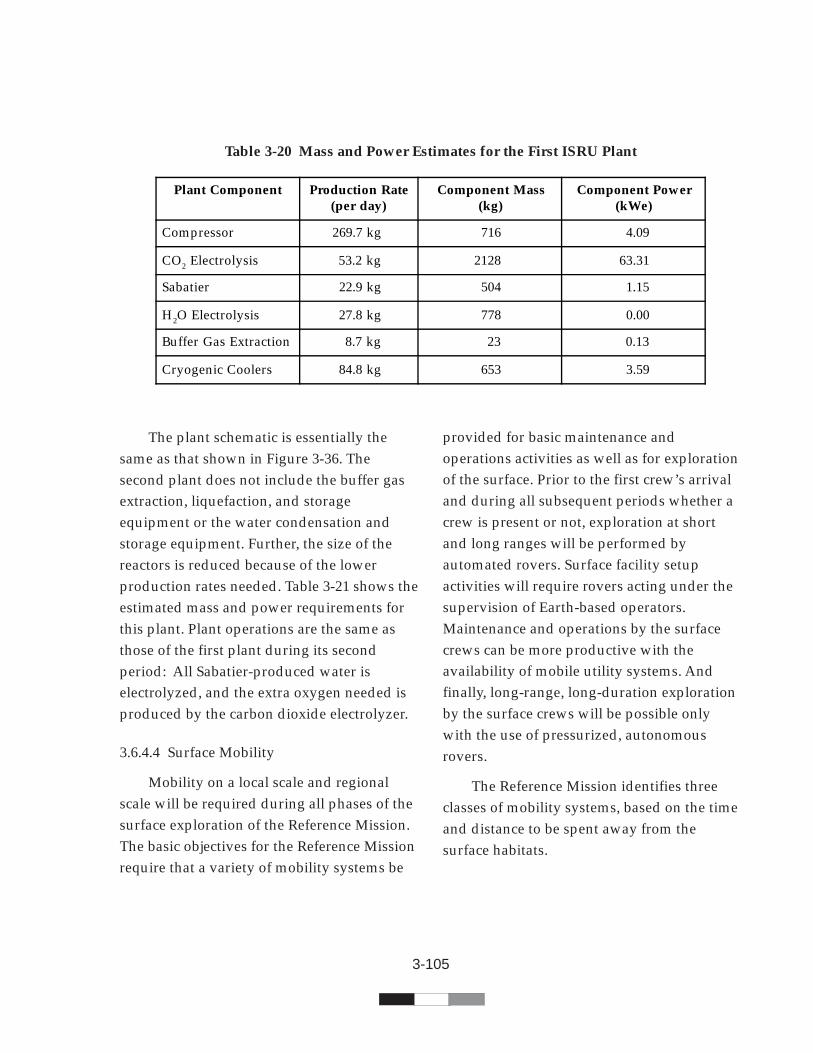
3-105
The plant schematic is essentially thesame as that shown in Figure 3-36. Thesecond plant does not include the buffer gasextraction, liquefaction, and storageequipment or the water condensation andstorage equipment. Further, the size of thereactors is reduced because of the lowerproduction rates needed. Table 3-21 shows theestimated mass and power requirements forthis plant. Plant operations are the same asthose of the first plant during its secondperiod: All Sabatier-produced water iselectrolyzed, and the extra oxygen needed isproduced by the carbon dioxide electrolyzer.
3.6.4.4 Surface Mobility
Mobility on a local scale and regionalscale will be required during all phases of thesurface exploration of the Reference Mission.The basic objectives for the Reference Missionrequire that a variety of mobility systems be
provided for basic maintenance andoperations activities as well as for explorationof the surface. Prior to the first crew’s arrivaland during all subsequent periods whether acrew is present or not, exploration at shortand long ranges will be performed byautomated rovers. Surface facility setupactivities will require rovers acting under thesupervision of Earth-based operators.Maintenance and operations by the surfacecrews can be more productive with theavailability of mobile utility systems. Andfinally, long-range, long-duration explorationby the surface crews will be possible onlywith the use of pressurized, autonomousrovers.
The Reference Mission identifies threeclasses of mobility systems, based on the timeand distance to be spent away from thesurface habitats.
Table 3-20 Mass and Power Estimates for the First ISRU Plant
Plant Component Production Rate(per day)
Component Mass(kg)
Component Power(kWe)
Compressor 269.7 kg 716 4.09
CO2 Electrolysis 53.2 kg 2128 63.31
Sabatier 22.9 kg 504 1.15
H2O Electrolysis 27.8 kg 778 0.00
Buffer Gas Extraction 8.7 kg 23 0.13
Cryogenic Coolers 84.8 kg 653 3.59
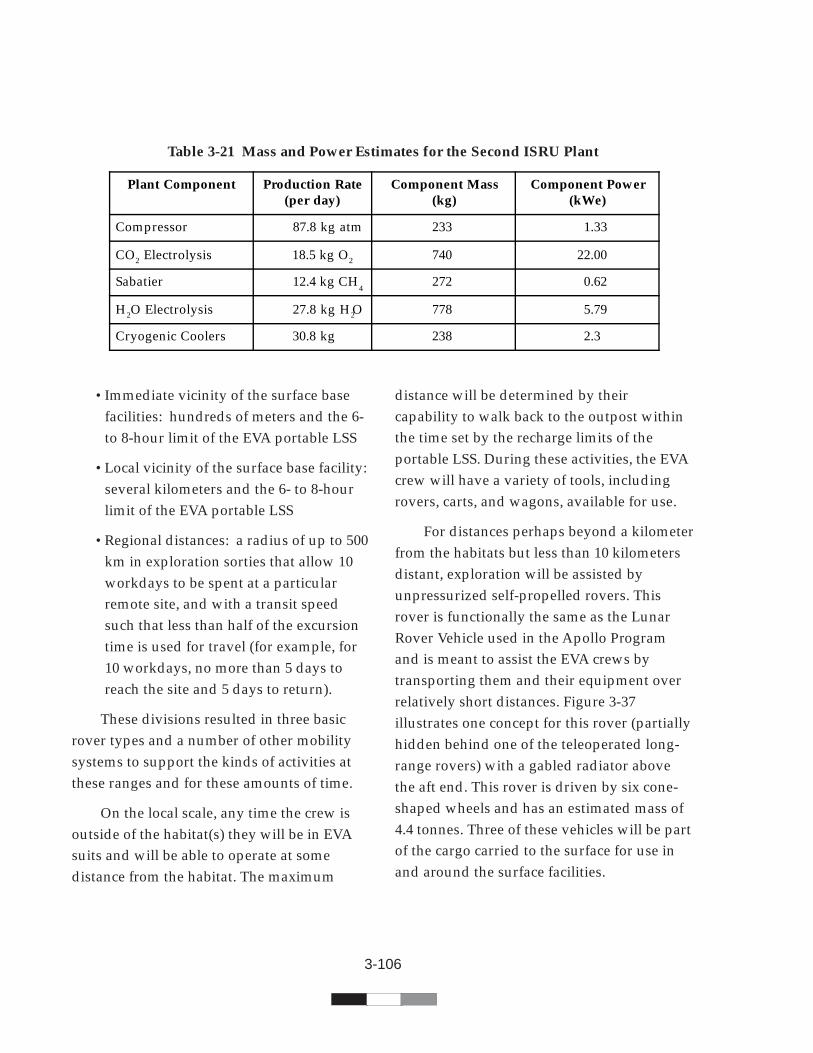
3-106
•Immediate vicinity of the surface basefacilities: hundreds of meters and the 6-to 8-hour limit of the EVA portable LSS
•Local vicinity of the surface base facility:several kilometers and the 6- to 8-hourlimit of the EVA portable LSS
•Regional distances: a radius of up to 500km in exploration sorties that allow 10workdays to be spent at a particularremote site, and with a transit speedsuch that less than half of the excursiontime is used for travel (for example, for10 workdays, no more than 5 days toreach the site and 5 days to return).
These divisions resulted in three basicrover types and a number of other mobilitysystems to support the kinds of activities atthese ranges and for these amounts of time.
On the local scale, any time the crew isoutside of the habitat(s) they will be in EVAsuits and will be able to operate at somedistance from the habitat. The maximum
distance will be determined by theircapability to walk back to the outpost withinthe time set by the recharge limits of theportable LSS. During these activities, the EVAcrew will have a variety of tools, includingrovers, carts, and wagons, available for use.
For distances perhaps beyond a kilometerfrom the habitats but less than 10 kilometersdistant, exploration will be assisted byunpressurized self-propelled rovers. Thisrover is functionally the same as the LunarRover Vehicle used in the Apollo Programand is meant to assist the EVA crews bytransporting them and their equipment overrelatively short distances. Figure 3-37illustrates one concept for this rover (partiallyhidden behind one of the teleoperated long-range rovers) with a gabled radiator abovethe aft end. This rover is driven by six cone-shaped wheels and has an estimated mass of4.4 tonnes. Three of these vehicles will be partof the cargo carried to the surface for use inand around the surface facilities.
Plant Component Production Rate(per day)
Component Mass(kg)
Component Power(kWe)
Compressor 87.8 kg atm 233 1.33
CO2 Electrolysis 18.5 kg O2 740 22.00
Sabatier 12.4 kg CH4
272 0.62
H2O Electrolysis 27.8 kg H2O 778 5.79
Cryogenic Coolers 30.8 kg 238 2.3
Table 3-21 Mass and Power Estimates for the Second ISRU Plant

3-107
On the regional scale, beyond the saferange for exploration on foot or inunpressurized rovers, crews will explore inpressurized rovers, allowing them to operatefor the most part in a shirtsleeveenvironment. Figure 3-38 illustrates onepossible concept for this rover. The rover isassumed to have a nominal crew of twopeople, but can carry four in an emergency.Normally, the rover would be maneuveredand EVAs would be conducted only duringdaylight hours, but sufficient power will beavailable to conduct selected investigations atnight. Crew accommodations inside the roverwill be relatively simple: a drive station, awork station, hygiene facilities, a galley, andsleep facilities. An airlock on this rover will becapable of allowing not only surface accessfor an EVA crew, but also direct connection tothe habitat, thus precluding the need for anEVA to transfer either to or from the rover.Each day on an excursion away from themain surface facilities, the rover has thecapability of supporting up to 16 person-hours of EVAs. Facilities for recharging theportable LSSs and for making minor repairsto the EVA suits are also included. The workstation will be used, in part, to operate twomechanical arms that can be used tomanipulate objects outside the rover withoutleaving the pressurized environment. Thesearms, along with other mobility subsystems,can also be operated remotely by Earth-basedpersonnel. This feature is required to allowmany of the deployment, setup, andmonitoring activities to be carried out prior tothe arrival of the first crew. A final feature of
this rover is the power system. The choice ofthe specific power system is discussed in alater section. However, this system will bemounted on a separate trailer to be towed bythe rover whenever it is in operation. At timeswhen the rover is dormant, the power trailercan be used for other purposes, including itsuse as a backup power source for any of thesurface facilities. Two pressurized rovers willbe carried to the surface. This allows forredundancy in this function, including thepossibility of rescuing the crew from adisabled rover located at a distance from thehabitats. Each rover is driven by four cone-shaped wheels and is estimated to have amass of 16.5 tonnes.
Exploration at a regional scale will alsobe undertaken by small teleoperated rovers.The foreground of Figure 3-38 illustrates onepossible concept for this rover. The mainpurpose for these rovers is to explore themartian surface at long distances, hundreds tothousands of kilometers, from the habitats.The activities carried out by this type of roverwill be to conduct scientific investigations,collect and return samples to the habitats, andscout possible locations for human crews toinvestigate in more detail. Three of theserovers will be delivered as part of the firstcargo mission and will be supervised fromEarth during the time between landing andthe arrival of the first crew. Determining sitesfor the crews to investigate and safe routes tothe sites will be the primary activity beforethe first crew arrives and during thoseperiods when no crew is at the surface base.When a crew is on the martian surface, these
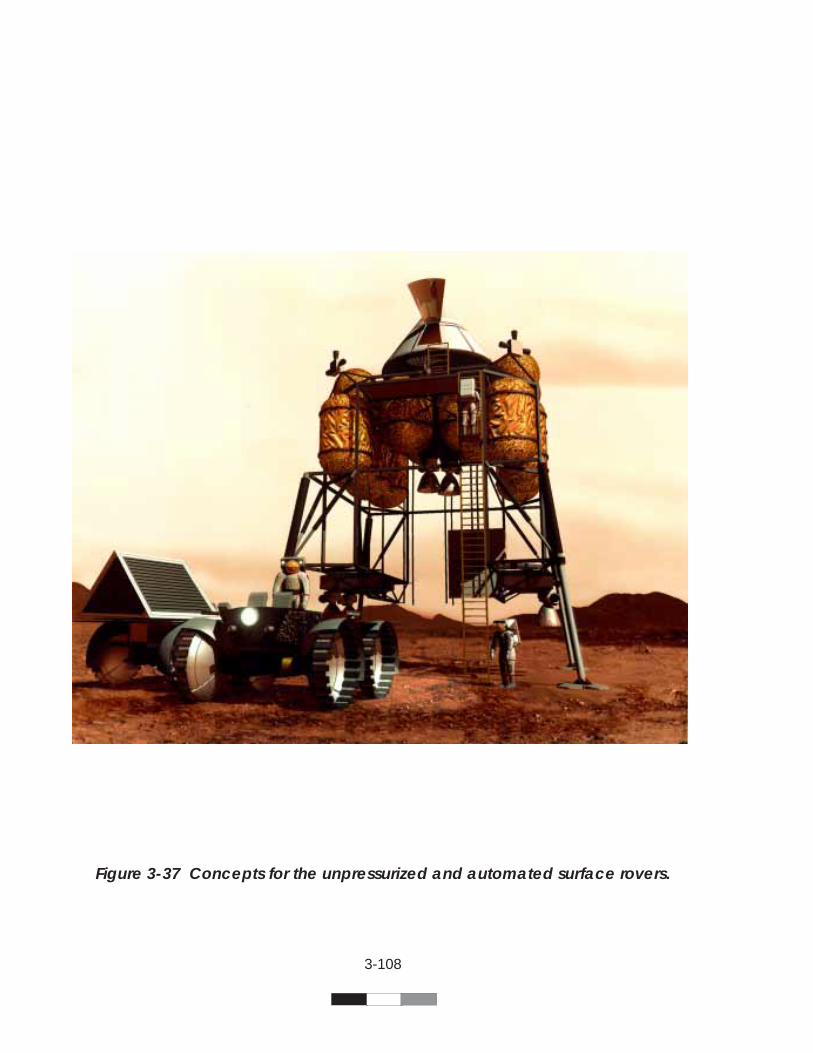
3-108
Figure 3-37 Concepts for the unpressurized and automated surface rovers.
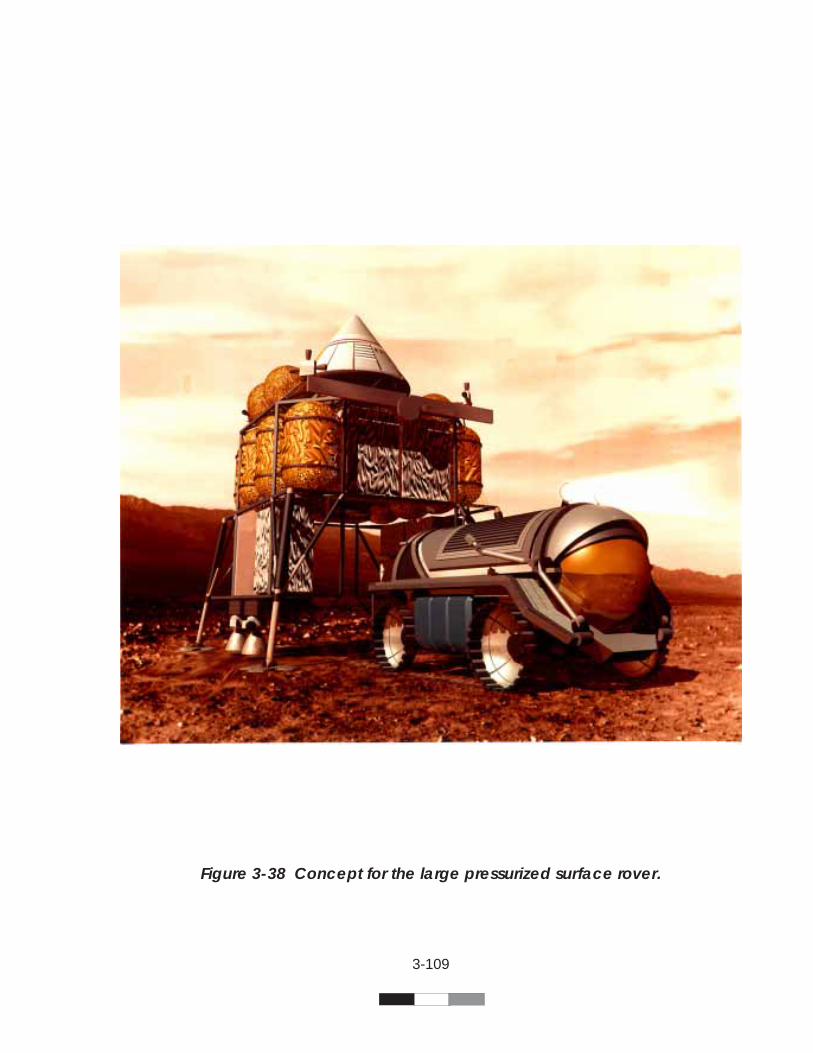
3-109
Figure 3-38 Concept for the large pressurized surface rover.

3-110
rovers will be available for teleoperation bythe crews. Focused exploration, samplecollection, and scientific measurements willbe the main tasks for these rovers while underthe control of the surface crew, who will beable to operate these rovers from theshirtsleeve environment of the surfacehabitat/laboratory. Each rover is estimated tohave a mass of 440 kilograms.
This range of mobility systems will allowexploration activities to be carried outcontinuously once the first cargo mission hasdelivered its payload to the martian surface.The variety of range requirements and surfaceactivities leads to a suite of mobility systemsthat have overlapping capabilities.
3.6.4.5 EVA Systems
The ability for individual crew membersto move around and conduct useful tasksoutside the pressurized habitats will be anecessary capability for the ReferenceMission. EVA tasks will consist ofconstructing and maintaining the surfacefacilities, and conducting a scientificexploration program encompassing geologicfield work, sample collection, anddeployment, operation, and maintenance ofinstruments. EVA systems provide a primaryoperational element and a critical componentof the crew safety system and must beintegrated into the design of a habitationsystem during the very early stages. Twosystems will make EVA possible for the crews:an EVA suit designed for use in the martianenvironment and an airlock system that will
allow the crew to safely exit and enter thepressurized habitats.
The EVA system will have the criticalfunctional elements of a pressure shell,atmospheric and thermal control,communications, monitoring and display, andnourishment and hygiene. Balancing thedesire for high mobility and dexterity againstaccumulated risk to the explorer will be amajor design requirement on a Mars EVAsystem. Lightweight and ease of maintenancewill also contribute to the design. Specificconcepts for an EVA suit that will satisfy theserequirements were not investigated in thisstudy. Further effort will be required totranslate these general needs into specificrequirements and an actual implementation.
The airlock system, although integralwith the habitation system, was developed asan independent element capable of being“plugged” or relocated as the missionrequires. Because EVA will be a substantialelement of any planetary surface mission, thedesign and location of the associated airlockfacilities will have a major impact on theinternal architecture of each pressurizedelement.
A conceptual airlock configuration wasprepared (Figure 3-39). In the foreground ofthis conceptual design is an airlock sized fortwo suited crew members. In the rear of theillustration is a facility for EVA suitmaintenance and consumables servicing.Each habitat will have an airlock locatedwithin it. The maintenance and consumables
3-111
servicing facility will be located in the surfacehabitat/laboratory.
3.6.4.6 Surface Power Systems
A source of power will be required for anumber of diverse systems operating on thesurface of Mars. A large fixed power source isrequired to support the propellantmanufacturing facility and the surfacehabitats. A mobile source of power is requiredto support the three categories of rovers thatwill move crew and scientific instrumentsacross the martian surface. Various powersystem options were reviewed for theirappropriateness to meet missionrequirements and guidelines for these surfacesystems. Contending power systemtechnologies include solar, nuclear, isotopic,electrochemical, and chemical for both thefixed and mobile power source.
While all surface element power systemrequirements were assessed for application
synergies that would suggest commonhardware (duplicates of the same or similardesign) or multiuse (reuse system in adifferent application or location) whereverprudent, the specific requirements for thefixed and mobile power sources wereexamined individually.
3.6.4.6.1 Fixed Surface Power Systems
To best determine the type and design ofthe fixed power system, an estimated powerprofile was developed and is shown in Figure3-40.
The power system must be one of thefirst elements deployed because it providespower to produce the life support cache andascent vehicle propellants prior to the launchof the first crew. Approximately 370 days willbe available to produce the required lifesupport cache and ascent propellant.However, this will be reduced by the time todeploy the power system. With an estimatedpower system deployment time of 30 to 60days, about 320 days remain for producingthese products. An initial 60 kWe power levelwas determined by this required deploymenttime and the energy required to produce thelife support cache and ascent vehiclepropellants during the time remaining. As theoutpost reaches full maturity, power levelsapproach 160 kWe due to increased habitationvolumes and life support capability.
Significant design requirements are alsoplaced on all the surface equipment deliveredon the initial cargo flights. Each system mustbe deployed to its respective locations and
Figure 3-39 Conceptual airlock andEVA suit maintenance facility.
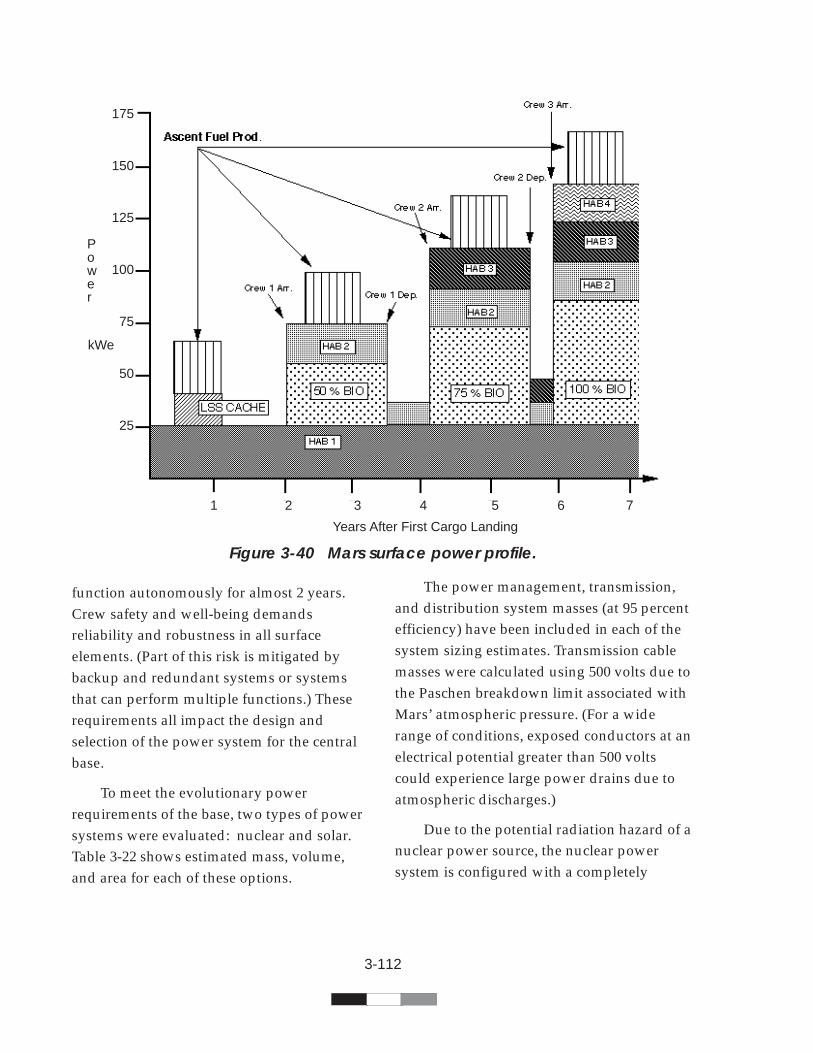
3-112
Figure 3-40 Mars surface power profile.
function autonomously for almost 2 years.Crew safety and well-being demandsreliability and robustness in all surfaceelements. (Part of this risk is mitigated bybackup and redundant systems or systemsthat can perform multiple functions.) Theserequirements all impact the design andselection of the power system for the centralbase.
To meet the evolutionary powerrequirements of the base, two types of powersystems were evaluated: nuclear and solar.Table 3-22 shows estimated mass, volume,and area for each of these options.
The power management, transmission,and distribution system masses (at 95 percentefficiency) have been included in each of thesystem sizing estimates. Transmission cablemasses were calculated using 500 volts due tothe Paschen breakdown limit associated withMars’ atmospheric pressure. (For a widerange of conditions, exposed conductors at anelectrical potential greater than 500 voltscould experience large power drains due toatmospheric discharges.)
Due to the potential radiation hazard of anuclear power source, the nuclear powersystem is configured with a completely
175
150
125
100
75
50
25
Power
kWe
1 2 3 4 5 6 7
Years After First Cargo Landing
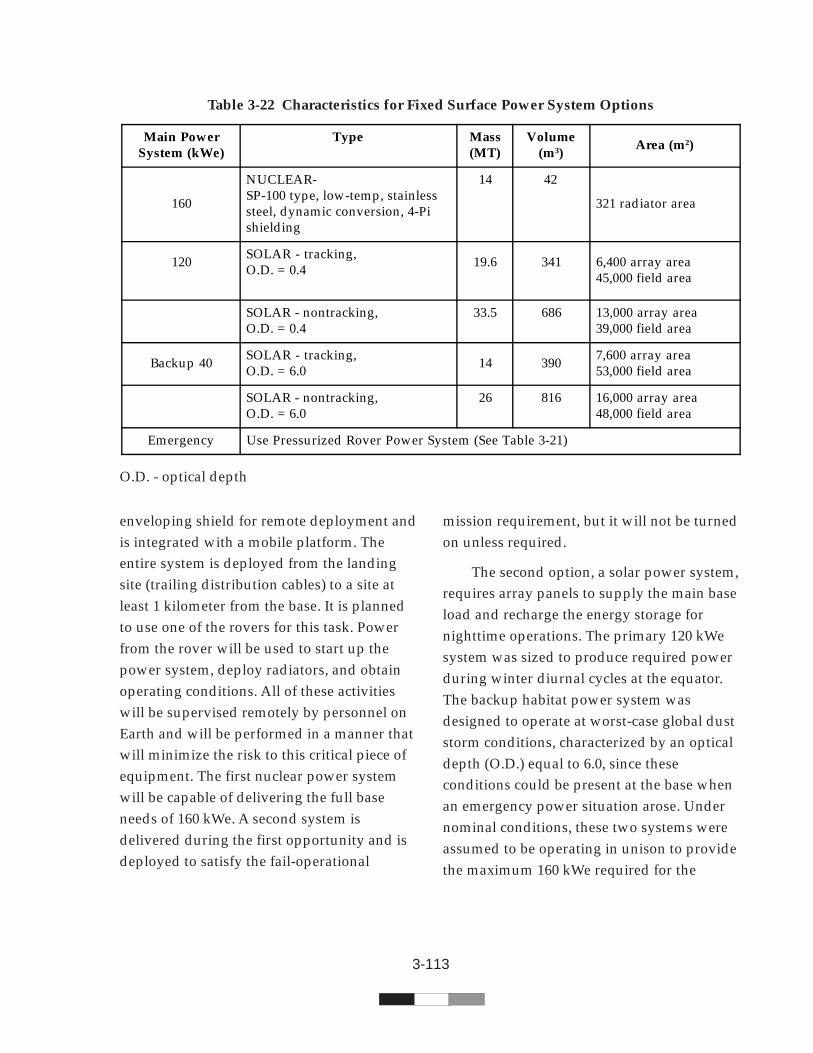
3-113
enveloping shield for remote deployment andis integrated with a mobile platform. Theentire system is deployed from the landingsite (trailing distribution cables) to a site atleast 1 kilometer from the base. It is plannedto use one of the rovers for this task. Powerfrom the rover will be used to start up thepower system, deploy radiators, and obtainoperating conditions. All of these activitieswill be supervised remotely by personnel onEarth and will be performed in a manner thatwill minimize the risk to this critical piece ofequipment. The first nuclear power systemwill be capable of delivering the full baseneeds of 160 kWe. A second system isdelivered during the first opportunity and isdeployed to satisfy the fail-operational
mission requirement, but it will not be turnedon unless required.
The second option, a solar power system,requires array panels to supply the main baseload and recharge the energy storage fornighttime operations. The primary 120 kWesystem was sized to produce required powerduring winter diurnal cycles at the equator.The backup habitat power system wasdesigned to operate at worst-case global duststorm conditions, characterized by an opticaldepth (O.D.) equal to 6.0, since theseconditions could be present at the base whenan emergency power situation arose. Undernominal conditions, these two systems wereassumed to be operating in unison to providethe maximum 160 kWe required for the
Table 3-22 Characteristics for Fixed Surface Power System Options
O.D. - optical depth
Main PowerSystem (kWe)
Type Mass(MT)
Volume(m3)
Area (m2)
160
NUCLEAR-SP-100 type, low-temp, stainlesssteel, dynamic conversion, 4-Pishielding
14 42
321 radiator area
120 SOLAR - tracking,O.D. = 0.4 19.6 341 6,400 array area
45,000 field area
SOLAR - nontracking,O.D. = 0.4
33.5 686 13,000 array area39,000 field area
Backup 40 SOLAR - tracking,O.D. = 6.0 14 390 7,600 array area
53,000 field area
SOLAR - nontracking,O.D. = 6.0
26 816 16,000 array area48,000 field area
Emergency Use Pressurized Rover Power System (See Table 3-21)

3-114
mature base. The ISRU plant was notconsidered a life-critical function so thepower system was designed to produce fullpower at an O.D. of 0.4 or a clear Mars sky.Both sun tracking and nontracking arrayswere evaluated. The solar tracking array totalland area is greater that the nontrackingbecause of the required panel spacing neededto eliminate shadows from one panel uponthe other.
O.D., or the intensity of the solarradiation reaching the surface of Mars, has asignificant impact on system size and mass.For example, if the entire 160 kWe were solargenerated, the array field would encompassabout 11 (O.D. = 0.4) to 40 (O.D. = 6.0) footballfields. In addition, the need for prompttelerobotic emplacement of the array panelsand interconnecting cables would present asignificant challenge. Dust erosion, dustaccumulation, and wind stresses on the arraypanels raise power system lifetime issues. Forthese reasons, nuclear power was deemed themost appropriate primary power source forthe fixed surface power system. However, useof the “in-space” solar array and fuel cellpower system is assumed as the habitatemergency/backup power systems, whichcould be stowed until needed. The MAVs willalso be provided with this same solar arraybackup system to ensure that themanufactured propellants are maintained intheir cryogenic state should power from thenuclear system be lost (Withraw, et al., 1993).
3.6.4.6.2 Mobile Surface Power Systems
The other major category of surfacesystems needing a power source will be therovers. The three types of rovers identified,long-range pressurized, local unpressurized,and long-range robotics, each have powerrequirements driven by their range and thesystems they must support. Several powersource options were evaluated for the rovers,including solar arrays/RFCs, combustionengines, and isotopes. Solar array systemswere not considered due to the large size ofthe array needed to support each vehicle.
The long-range pressurized rover mustbe able to support a crew of 2 to 4, with a 500-km range sortie (5 days out, 10 days at site, 5days back). The power estimate for this roveris 10 kWe continuous. It is anticipated that thepressurized, regional rover or its powersystem would be used to assist in thedeployment of the main power system,situate future habitat modules, and serve asbackup emergency power when required. Adesirable feature for the rover power systemis that it be mounted on its own cart. Thiswould add considerable versatility to its usewhen the rover is not on a sortie.
The local unpressurized rover isconceptually the same as the Apollo lunarrover. It would function to transport the crew10's of kilometers, 3 hours out and back, and 4hours at the site.
Table 3-23 shows the estimated mass,volume, and array or radiator area for thefour power system options listed.
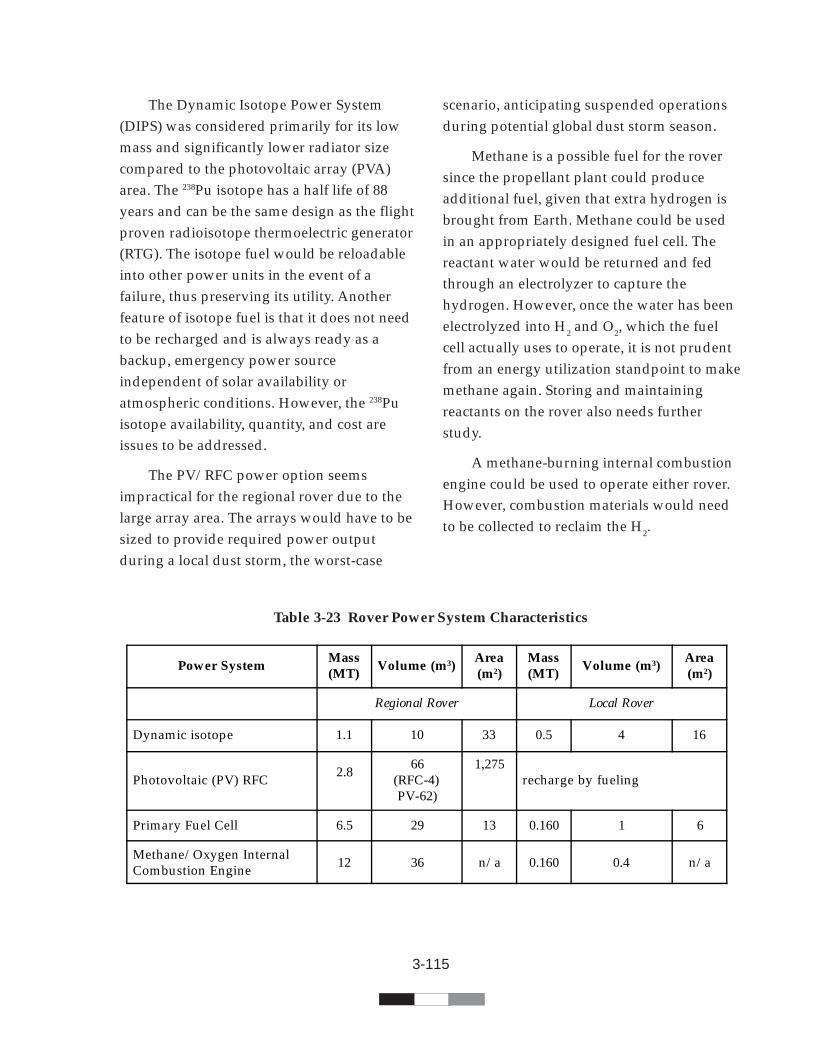
3-115
The Dynamic Isotope Power System(DIPS) was considered primarily for its lowmass and significantly lower radiator sizecompared to the photovoltaic array (PVA)area. The 238Pu isotope has a half life of 88years and can be the same design as the flightproven radioisotope thermoelectric generator(RTG). The isotope fuel would be reloadableinto other power units in the event of afailure, thus preserving its utility. Anotherfeature of isotope fuel is that it does not needto be recharged and is always ready as abackup, emergency power sourceindependent of solar availability oratmospheric conditions. However, the 238Puisotope availability, quantity, and cost areissues to be addressed.
The PV/RFC power option seemsimpractical for the regional rover due to thelarge array area. The arrays would have to besized to provide required power outputduring a local dust storm, the worst-case
scenario, anticipating suspended operationsduring potential global dust storm season.
Methane is a possible fuel for the roversince the propellant plant could produceadditional fuel, given that extra hydrogen isbrought from Earth. Methane could be usedin an appropriately designed fuel cell. Thereactant water would be returned and fedthrough an electrolyzer to capture thehydrogen. However, once the water has beenelectrolyzed into H2 and O2, which the fuelcell actually uses to operate, it is not prudentfrom an energy utilization standpoint to makemethane again. Storing and maintainingreactants on the rover also needs furtherstudy.
A methane-burning internal combustionengine could be used to operate either rover.However, combustion materials would needto be collected to reclaim the H2.
Table 3-23 Rover Power System Characteristics
Power SystemMass(MT)
Volume (m3)Area(m2)
Mass(MT)
Volume (m3)Area(m2)
Regional Rover Local Rover
Dynamic isotope 1.1 10 33 0.5 4 16
Photovoltaic (PV) RFC 2.8 66(RFC-4)PV-62)
1,275recharge by fueling
Primary Fuel Cell 6.5 29 13 0.160 1 6
Methane/Oxygen InternalCombustion Engine 12 36 n/a 0.160 0.4 n/a

3-116
Given these system characteristics, theDIPS system was selected for the long-rangepressurized rover, and the primary fuel cellwas selected for the local rover. The DIPSsystem can be another level of functionalredundancy for the base systems, and thesmall amounts of radiation emitted can bemitigated by a small shield and distance tothe rover crew. The primary fuel cell wouldmeet the local rover requirements at less massthan other options. However, this powersystem design assumes refueling after everysortie. The power system for the long-rangerobotic rover was not specifically addressedin this analysis. However, the long range overrugged terrain and long duration of thisrover’s missions will likely drive the selectionto an RTG- or DIPS-type system.
3.7 Robotic Precursors
Robotic precursor missions will play asignificant role in two important facets of theReference Mission. The first will be to gatherinformation about Mars that will be used todetermine specific activities the crew willperform and where they will perform them.The second will be to land, deploy, operate,and maintain a significant portion of thesurface systems prior to the arrival of thecrew.
3.7.1 Current Robotic Program Plans
In November and December 1996, NASAlaunched two missions to Mars: the MarsGlobal Surveyor (MGS) and the MarsPathfinder lander. MGS will monitor global
weather and provide global maps of martiansurface topography and mineral distribution.The Mars Pathfinder will validate entry,descent, and landing technologies and willalso deploy a microrover on the surface toanalyze the elemental composition of martianrocks and soil.
NASA’s Mars Surveyor Program willcontinue the robotic exploration of Mars withtwo spacecraft launches planned during eachof the 1998, 2001, and 2003 opportunities. AMars sample return mission is scheduled for2005. The goals of the Mars Surveyor Programare to expand our knowledge of the geologyand resources on Mars, to understand themeteorology and climate history, and tocontinue the search for evidence of past life.
3.7.2 Mars Sample Return With ISRU
Detailed laboratory analyses of martianrock, soil, and atmosphere samples at Earthwill provide essential information neededbefore sending humans to Mars. In additionto an understanding of the martianenvironment, a sample return mission willafford the opportunity to validate thetechnology of ISRU for propellant production.As discussed in Section 3.6.4.3, ISRU is acritical technology for the Reference Mission.To ensure that this technology is available forthe human missions, it should bedemonstrated on the Mars sample return in2005.

3-117
3.7.3 Human Exploration PrecursorNeeds
Robotic precursor missions offer thecapability to demonstrate and validate theperformance of key technologies that areessential to the Reference Mission (such asISRU, aerobraking and aerocapture at Mars)and to provide information needed for siteselection.
Critical to selection of the landing site forthe humans will be the availability ofindigenous resources, and of paramountimportance is water. Precursor missionswhich can identify the location andaccessibility of water will be invaluable in theMars exploration program. To satisfy thehuman habitation objectives in particular, itwould be highly desirable to locate anoutpost site where water can be readilyextracted from minerals or from subsurfacedeposits. Such a determination may only bepossible from data collected by a surfacemission.
With the three human missions alllanding at the same site, selection of thatlanding site is very important. The locationchosen must permit the objectives of theReference Mission to be achieved.Consequently, the site will be chosen on thebasis of proximity to a region of high scienceyield, availability of water or otherindigenous resources, and operationsconsiderations such as a hazard-free terrainfor safe landing and surface mobility. Finalsite selection may require several robotic sitereconnaissance landers to be sent to survey
various candidate sites. Detailed maps ofcandidate landing sites built from datagathered by these precursor missions willdefine the safety and operational hazards ofthe sites, as well as confirm access toscientifically interesting locations andresources.
In summary, then, the Reference Missionassumes a set of robotic precursor missionswhich includes:
•The Mars Surveyor Program
•A Mars sample return mission in 2005which also demonstrates in situpropellant production
•Other sample return missions to variousinteresting regions
•A demonstration of aerobraking/aerocapture
•Mission(s) to search for resources,particularly water
•Site reconnaissance landers to aid in theselection of the human landing site
The last two mission types may havetheir objectives incorporated into the MarsSurveyor Program or the Mars sample returnmission; or a separate set of missions may berequired.
3.7.4 Autonomous Deployment ofSurface and Orbital Elements
As described in Section 3.5.3.2, a keystrategy of the Reference Mission is to use asplit mission concept that will allow

3-118
unmanned cargo to be sent to Mars on lowenergy, longer-transit-time trajectories. Theseunmanned elements must arrive at Mars andbe verified to be operating properly before thehuman crew is launched from Earth. Thearrival, precision landing, deployment, andoperation of these surface or orbital elementswill be performed using robotic systems. Thedetailed nature of these robotic systems wasnot examined as part of this study; however,the discussion of the surface facilities and thenature of the operations involved to set up,maintain, and, if necessary, repair thesefacilities can well be imagined. This area oftechnology development will be a very activeone to meet the needs of the ReferenceMission.
3.8 Ground Support and FacilitiesOperations
The overall goal of mission operations isto provide a framework for planning,managing, and conducting activities whichachieve mission objectives. (In general,mission objectives can be considered allactivities which maintain and support humanpresence and support scientific researchduring the mission.) Achieving thisoperational goal requires successfulaccomplishment of the following functions.
•Safe and efficient operation of allresources (includes, but is not limited to,vehicles, support facilities, trainingfacilities, scientific and systems data, andpersonnel knowledge and experiencebases).
•Provision of the facilities and anenvironment which allow users (such asscientists, payload specialists, and to anextent crew members) to conductactivities that will enhance the missionobjectives.
•Successful management and operation ofthe overall program and supportingorganizations. This requires definingroles and responsibilities andestablishing a path of authority. Programand mission goals and objectives mustbe outlined so that managementresponsibilities are clear and direct.Confusing or conflicting objectives canresult in loss of resources, the mostimportant of which are time and money.In addition, minimizing layers ofauthority will help avoid prolongedoperational decision-making activities.This is key when considering large,complex programs such as the ReferenceMission.
As with the discussion of crew operations(Section 3.4), specific hardware, software, andsystem recommendations will not be made inthis section. Guidelines for the organizationand management of operations are putforward as foundation on which an actualoperations philosophy and detailed planshould be built.
The organization of supporting facilitiesmust follow the lower costing and innovativeapproaches being taken by other areas of theReference Mission. One way of achieving this

3-119
is to use the related expertise andfunctionality of existing facilities to keep to aminimum the layers of authority andoverhead in the program and take advantageof the existing knowledge bases at eachfacility. Proper and efficient organization ofmission operations and support facilities isrequired for any program to be successful.
The Reference Mission has the addedcomplication of being a program with phasesthat cannot be supported with near real-timeoperations. Planetary surface operations poseunique operational considerations on theorganization of ground support and facilities.Near real-time ground support, as providedfor current manned space programs, is notpossible. A move toward autonomy in vehicleoperations, failure recognition and resolution,and mission planning is needed; and groundsupport must be structured to support theseneeds. Some of the specific criteria requiredfor allocating functions between groundsupport and the Mars surface base will be theavailable resources at the remote site versuson Earth, criticality of functions for crewsafety and mission success, and desired timeand resources available for achievingscientific mission objectives.
In general, due to the uniqueness ofplanetary surface operations, Earth-basedsupport should manage and monitoroperations planning and execution, and crewmembers should be responsible for operationsplanning and execution. Crew members willbe told what tasks to do or what objectives toaccomplish, but not how to do it. This has the
benefit of involving system and payloadsexperts in the overall planning, yet givingcrews the flexibility to execute the tasks. Thisapproach differs from current Space Shuttleoperations where detailed plans are preparedby ground personnel, crew members executethe plans, and ground personnel monitor innear real-time. The crew members are fullyinvolved in execution but do little in terms ofplanning. The proposed method for theReference Mission would take advantage ofthe unique perspective of crew members in anew environment but would not restrict theiractivities because of the mission’s remotenature. Additionally, it places theresponsibility of mission success with thecrew, while the overall responsibility forprioritizing activities in support of missionobjectives resides with Earth-based support.
After dividing functional responsibilitiesbetween Earth-based support and crew, thesupport may be structured to manage theappropriate functions. To accomplish missionobjectives while maintaining the firstoperational objective of safe and efficientoperation of all resources, Earth-basedsupport can be organizationally separatedinto systems operations and scienceoperations, provided a well-defined interfaceexists between the two. The systemsoperations team would be responsible forconducting the safe and efficient operation ofall resources, while the science operationsteam would be responsible for conductingactivities which support scientific research.Such an organizational structure would

3-120
dictate two separate operations teams withdistinct priorities and responsibilities yet thesame operational goal.
Crew and vehicle safety are always ofprimary concern. When those are ensured,science activities become the highest priority.To accommodate this hierarchy of prioritieswithin the operations management structure,the overall operations manager should residewithin systems operations. A scienceoperations manager, who heads the scienceoperations team, should organizationally bein support of the operations manager. Variouslevels of interfaces between systems engineersand science team members must exist tomaximize the amount of science and missionobjectives that can be accomplished. Forexample, a proposed science activity mayneed systems information for its planning andfeasibility studies, and such information,including providing access to the systems’experts, must be made available. There maybe a few overlapping areas of responsibilitybetween the systems and science teams. (Inthe area of crew health and safety, forexample, scientific investigators doingbiomedical research on the crews will have tointerface with the systems medical teamresponsible for maintaining crew health.)Avenues for such interaction and exchangemust be provided to ensure mission success.
3.8.1 Systems Operations
Systems operations are those tasks whichkeep elements of the program in operationalcondition and support productive utilization
of program resources. Thus, the systemsoperations team has the responsibility forconducting the safe and efficient operation ofall such resources and consists ofrepresentatives from each of the primarysystems (power, propulsion, environmental,electrical, etc.) used throughout the variousmission phases. This organizational structureis similar to current flight vehicle operationswhere representatives for each system areresponsible for verifying the system’soperational functionality. Each systemrepresentative will have an appropriatesupport team of personnel familiar with thehardware and software of that system.
Real-time operational support will beapplicable only during launch, Earth orbit (forvehicle and crew checkout), and Earth entryphases. As a result, the systems operationsteam will function in a response, tracking,and planning mode throughout most of theother mission phases. Thus, Earth-basedoperations will be a checks and balancesfunction analogous to the missionengineering functions executed during SpaceShuttle missions. Hardware and softwaredocumentation will be available to the crewon board for real-time systems operations andfailure response. However, Earth-basedsupport must be provided for instances wheredocumentation is limited or does not cover aparticular situation.
Except for the above mentioned nearreal-time mission phases, data monitoring byEarth-based personnel must be limited toperiodic evaluations. Data and

3-121
communication constraints will make real-time system monitoring by Earth-basedpersonnel impractical and unfeasible. Failuresand other systems issues will be worked byEarth-based personnel on an as needed basisand in support of long-term trend analysis.Vehicle and system maintenance andcheckout will be evaluated by the Earth-basedsystems experts to assist in crew monitoringand verification. Consumables managementsuch as usage planning and tracking will bedone by the crew (with some degree ofautomation) with Earth-based personneldoing verification only.
3.8.2 Science Operations
The science operations team’s solefunction is to recommend, organize, and aidin conducting all activities which supportscientific research within the guidelines of themission objectives. The team will consist ofrepresentatives from the various sciencedisciplines (biology, medicine, astronomy,geology, atmospherics, etc.) which supportthe science and mission objectives. Eachscientific discipline will have an appropriatesupport team of personnel from government,industry, and academia who have expertise inthat field. The science operations team will actas the decision-making body for all scienceactivities from determining which activitieshave highest priority to handling anddisseminating scientific data. The scienceoperations team will be coordinated andmanaged by the science operations manager,who will be the ultimate decision maker and
the primary interface between the scienceteam and the operations manager.
As science activities (such as initialinvestigations, clarification of previousresearch, and follow-up investigations) areproposed by various principle investigators,the science team will evaluate the proposedresearch, determine feasibility andappropriateness of the study, and selectappropriate crew activities based on availabletime and personnel. This process is similar tothe process used by the National ScienceFoundation for the U.S. Antarctic Programwhich has successfully operated remotescientific bases in Antarctica since 1970(Buoni, 1990). Selected science proposals willbe presented to the systems operations teamfor evaluation of feasibility and resources. Forexample, appropriate members of the systemsoperations team will determine if there areenough consumables to support the requiredactivities and if all of the desired activity isoperationally feasible from a systemsstandpoint. Upon verification, the proposedresearch activity will be submitted to the crewfor execution.
An initial set of science activities will beplanned before each crew departs Earth. Thisis especially true of the scientificinvestigations which support not only crewhealth and safety but also the primarymission objectives. As new discoveries aremade and new avenues for research areopened, an iterative science planning processwill become essential for the success andeffectiveness of all scientific activities.
3-122
Successful scientific operations will alsorequire, when needed, crew access to theprincipal investigators for a given researchavenue. Such access must be made feasiblewithin the structure of mission operations.
3.9 Programmatic Issues
Three significant programmatic issuesmust be considered in an undertaking of thismagnitude, if the undertaking is to besuccessfully achieved: cost, management,and technology development. Each of thesefactors was examined to determine how theyshould be incorporated into this and furtherstudies of the Reference Mission orcomparable endeavors.
3.9.1 Cost Analysis
Cost analysis is an important element inassessing the value of a program such as thisand should be used from the very beginning.But at the beginning of a program and, inmany cases, up to the time that specificationsare written and contracts are let, it is notpossible to analytically determine the cost of aprogram. If new systems need to bedeveloped for programs, it is not possible toknow at the outset what the total cost will bebecause hardware is not on the shelf. Forthese reasons, cost models are used that aretypically based on historical data for similarprograms.
•The total program cost will be importantto the beneficiaries and resourceproviders, who will be interested inwhether to invest current and future
resources in this program or somealternative program. As many of thebenefits of an exploration program areintangible and long term, reducing theprogram costs to an understandable andsupportable level is of primeimportance.
•Whatever the total cost, the program willnot be undertaken if resources are notavailable. Thus, cost estimates can be thebasis for apportionment of resourcerequirements between participants,phasing of resource provisions, orphasing of mission elements to avoidpeak-year funding issues that couldstymie the program. Little has been donein the Reference Mission costing toaddress this question; however, thedatabase is available to analyze cost-phasing strategies.
•The cost of mission elements andcapabilities needs to be understood inorder to prioritize early investments intechnology and initiate other cost-reduction strategies. The estimated costof each element (for example, ETOlaunch) is related to the program risk,with higher relative costs associatedwith larger perceived risks ofdevelopment or operation. Thus,understanding the cost can be a first stepin designing program risk-reductionstrategies. As part of this process,estimates were also made of the costuncertainty for each of the technicalelements of the mission, which are also
3-123
useful in understanding the appropriatecapability development strategies. In thepast, technology development effortshave focused primarily on improvingperformance. Now, it is important toaddress reduction of cost as a goal of thetechnology development program.
The cost of a program such as theReference Mission is a function of two majorvariables: the manner in which it is organizedand managed and the technical content of theprogram.
3.9.1.1 Organizational Culture and Cost
Management systems and theorganization under which programs areconducted are a major factor in the cost of aprogram. Basing costs simply on historicaldata implies that the management systemunder which the historical programs werecarried out will be assumed for the newprogram. This is a particularly seriousproblem in estimating the Reference Missioncosts, as the environment in which futurespace exploration will be carried out will bemuch more cost-conscious than in the past.Changes in management, for which nocomparative costs are available, will have tooccur. Because management style and cultureare introduced at each level of design andproduction, the leverage of managementchanges in making cost reductions can bequite high. However, such changes aredifficult to estimate. This is a major reasonwhy cost analysis should be considered adesign tool to be used at all stages of a
program. It is also a major reason to seekexamples or benchmarks in other programs todetermine the best possible managementapproaches to design and development, or toconduct specific programs under newmanagement rules as prototypes for theapproach that will be used in the actualprogram.
The cost of doing space missions lies atthe extreme edge of costliness in comparisonto other high technology systems. Thetechnical reasons for this appear to be thatspace missions:
•Are usually one of a kind or are projectswith small numbers of production units
•Are typically aimed at expandingcapability and technology, so aredesigned with small margins of mass,power, volume, etc.
•Have high transportation costs, so highreliability in the spacecraft is important
•Are expected to operate for extendedperiods of time in difficult environmentsand, in the case of crewed vehicles, theymust meet high standards of safety
The engineering and managementculture that has been built up around thesecharacteristics has stressed excellence ofperformance, safety, and high reliability. Costhas typically been a secondary criterion. It isnot clear that high quality performance andhigh reliability always require thecorresponding costly culture.

3-124
To illustrate the effect of culture on cost,consider Figure 3-41 which shows the relativecost of programs developed using differentmanagement approaches. Point 0 is therelative cost for human spacecraft, point 1 isfor robotic spacecraft, point 2 for missiles, andpoint 3 for military aircraft. Differences inmanagement styles develop as a result of thedifferent environments in which programs arecarried out.
Table 3-24 depicts the differencesbetween a “Skunk Works” managementenvironment, such as might be used on amilitary aircraft development program (point2 in Figure 3-41) and the environment forNASA’s human programs. Some of thesedifferences will have to be addressed if thecost of human space exploration is to bereduced. To further illustrate differences,Table 3-25 compares the parameters of thedevelopment culture for commercial aircraftand NASA human programs. These arestarting points that indicate the changes thatwill be necessary.
The cost model used for the ReferenceMission (see next section) takes thesevariables into account in a “culture” variable,which can be characterized in more detail bysuch attributes as organizational structure,procurement approach, and the degree ofprogram office involvement in production.
3.9.1.2 The Cost Model
The cost model used for the technicalcontent of the Reference Mission is theAdvanced Missions Cost Model (AMCM)
(Cyr, 1988). This model considers the scale(particularly mass), the scope (number ofproduction and test articles) of thedevelopment of each of the systems requiredto undertake the program, the complexity ortechnical readiness for each of the systemsand their subsystems, the schedule underwhich the program will be carried out, andthe production generation in which the itemis produced. To the extent that experienceexists or off-the-shelf hardware can beprocured, more precise numbers can beestimated. The newer or more untried atechnology is, the greater will be its cost in themodel.
Input for the AMCM model was derivedfrom previous experience and informationprovided by members of the Study Team.Included in the estimate were thedevelopment and production costs for all ofthe systems needed to support three humancrews as they explore Mars. In addition,ground rules and assumptions were adoptedthat incorporated some new managementparadigms, as discussed later in the ProgramManagement and Organization section. Themanagement costs captured program levelmanagement, integration, and a Level IIfunction. Typical pre-production costs, suchas Phase A and B studies, were also included.
Not included in the cost estimate wereselected hardware elements, operations, andmanagement reserve. Hardware costs notestimated include science equipment and EVAsystems, for which data were not available atthe time estimates were prepared; however,
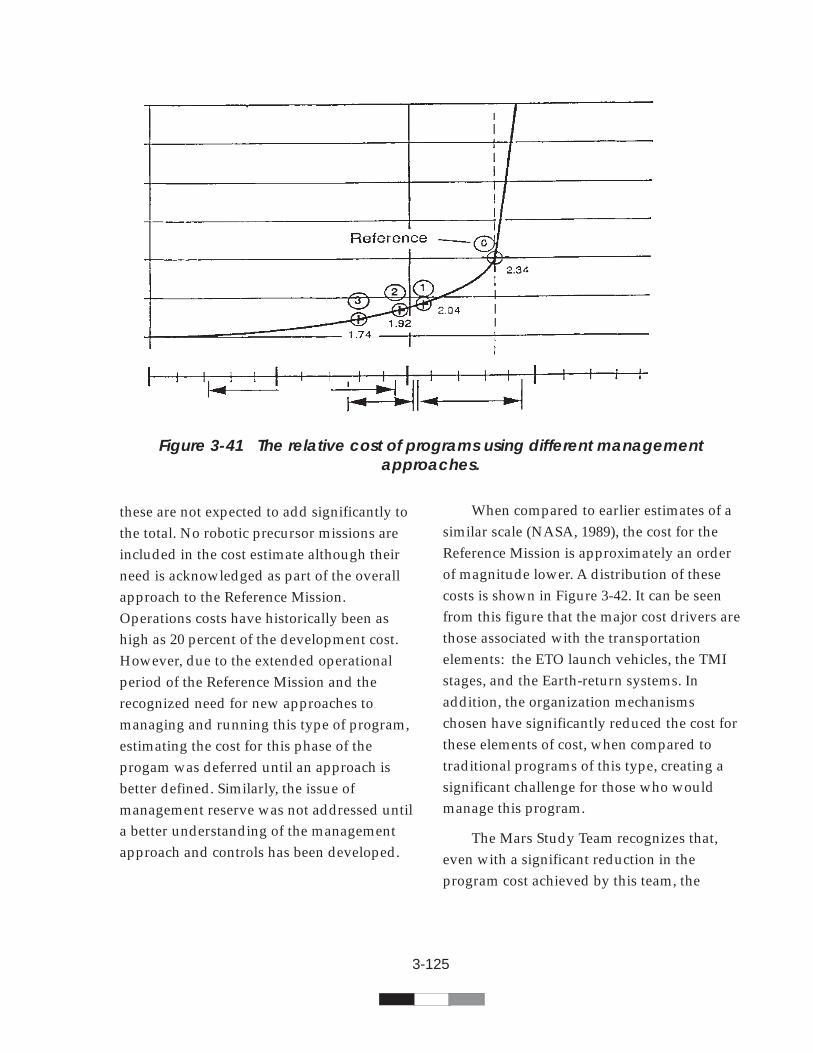
3-125
Figure 3-41 The relative cost of programs using different managementapproaches.
these are not expected to add significantly tothe total. No robotic precursor missions areincluded in the cost estimate although theirneed is acknowledged as part of the overallapproach to the Reference Mission.Operations costs have historically been ashigh as 20 percent of the development cost.However, due to the extended operationalperiod of the Reference Mission and therecognized need for new approaches tomanaging and running this type of program,estimating the cost for this phase of theprogam was deferred until an approach isbetter defined. Similarly, the issue ofmanagement reserve was not addressed untila better understanding of the managementapproach and controls has been developed.
When compared to earlier estimates of asimilar scale (NASA, 1989), the cost for theReference Mission is approximately an orderof magnitude lower. A distribution of thesecosts is shown in Figure 3-42. It can be seenfrom this figure that the major cost drivers arethose associated with the transportationelements: the ETO launch vehicles, the TMIstages, and the Earth-return systems. Inaddition, the organization mechanismschosen have significantly reduced the cost forthese elements of cost, when compared totraditional programs of this type, creating asignificant challenge for those who wouldmanage this program.
The Mars Study Team recognizes that,even with a significant reduction in theprogram cost achieved by this team, the
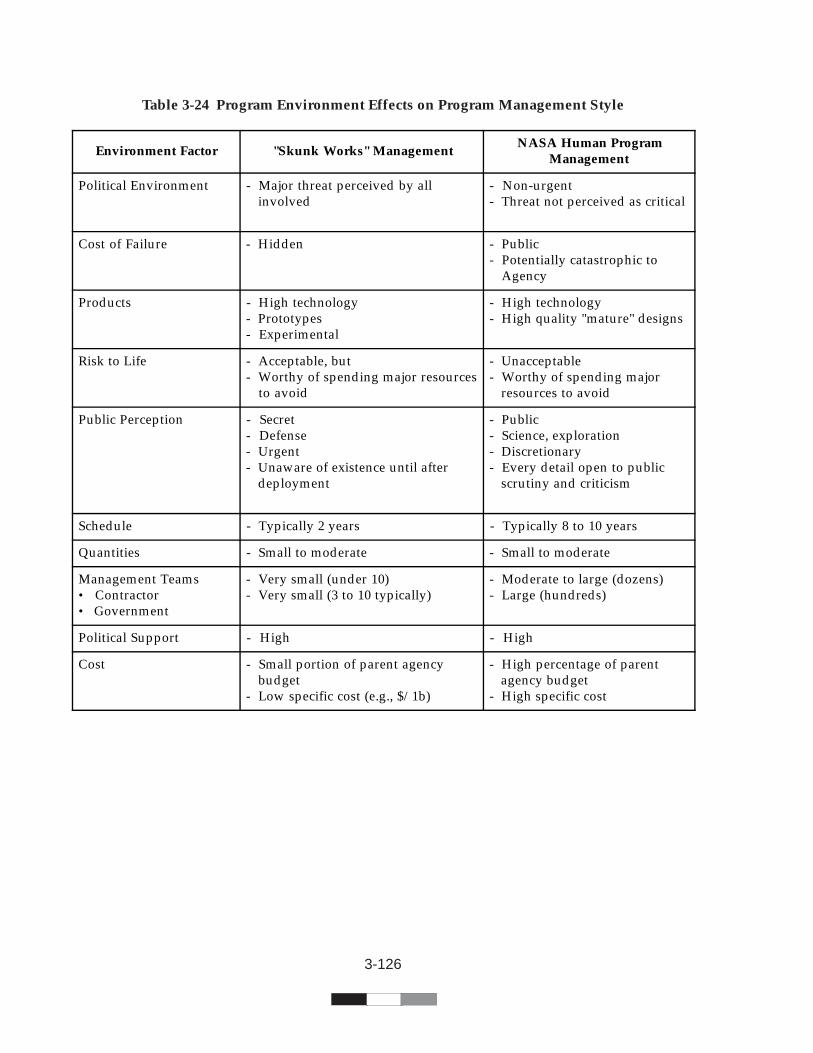
3-126
Table 3-24 Program Environment Effects on Program Management Style
Environment Factor "Skunk Works" ManagementNASA Human Program
Management
Political Environment - Major threat perceived by all involved
- Non-urgent- Threat not perceived as critical
Cost of Failure - Hidden - Public- Potentially catastrophic to Agency
Products - High technology- Prototypes- Experimental
- High technology- High quality "mature" designs
Risk to Life - Acceptable, but- Worthy of spending major resources to avoid
- Unacceptable- Worthy of spending major resources to avoid
Public Perception - Secret- Defense- Urgent- Unaware of existence until after deployment
- Public- Science, exploration- Discretionary- Every detail open to public scrutiny and criticism
Schedule - Typically 2 years - Typically 8 to 10 years
Quantities - Small to moderate - Small to moderate
Management Teams• Contractor• Government
- Very small (under 10)- Very small (3 to 10 typically)
- Moderate to large (dozens)- Large (hundreds)
Political Support - High - High
Cost - Small portion of parent agency budget- Low specific cost (e.g., $/1b)
- High percentage of parent agency budget- High specific cost
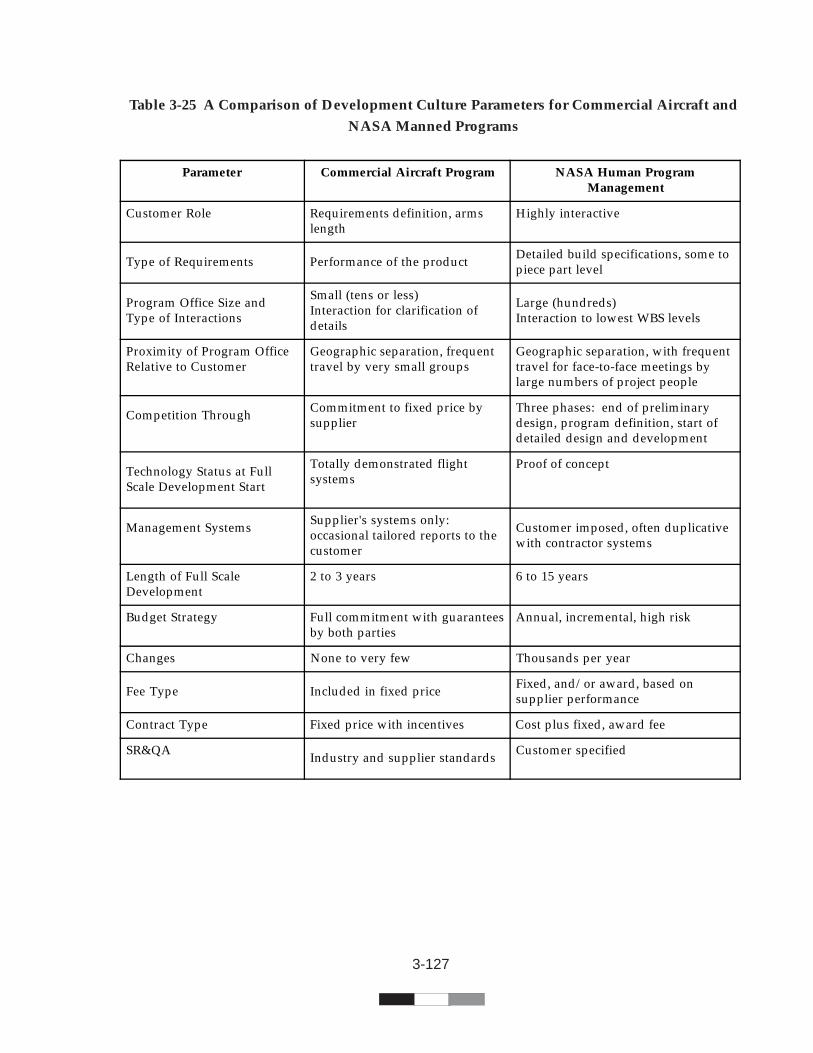
3-127
Table 3-25 A Comparison of Development Culture Parameters for Commercial Aircraft andNASA Manned Programs
Parameter Commercial Aircraft Program NASA Human ProgramManagement
Customer Role Requirements definition, armslength
Highly interactive
Type of Requirements Performance of the product Detailed build specifications, some topiece part level
Program Office Size andType of Interactions
Small (tens or less)Interaction for clarification ofdetails
Large (hundreds)Interaction to lowest WBS levels
Proximity of Program OfficeRelative to Customer
Geographic separation, frequenttravel by very small groups
Geographic separation, with frequenttravel for face-to-face meetings bylarge numbers of project people
Competition Through Commitment to fixed price bysupplier
Three phases: end of preliminarydesign, program definition, start ofdetailed design and development
Technology Status at FullScale Development Start
Totally demonstrated flightsystems
Proof of concept
Management Systems Supplier's systems only:occasional tailored reports to thecustomer
Customer imposed, often duplicativewith contractor systems
Length of Full ScaleDevelopment
2 to 3 years 6 to 15 years
Budget Strategy Full commitment with guaranteesby both parties
Annual, incremental, high risk
Changes None to very few Thousands per year
Fee Type Included in fixed price Fixed, and/or award, based onsupplier performance
Contract Type Fixed price with incentives Cost plus fixed, award fee
SR&QA Industry and supplier standards Customer specified

3-128
magnitude is probably still too high in today’sfiscal environment. More work to furtherreduce these costs is needed.
The largest cost element of the ReferenceMission is the ETO transportation systemwhich makes up approximately 32 percent ofthe total program cost. This element wasassumed to be a new HLLV capable of lifting220 tonnes of payload to LEO. Although thisis a launch vehicle larger than any previouslydeveloped, its design was assumed to bebased on the Saturn V technology, andengines were selected from existing designs.The costs of development were approximately20 percent of the total ETO Line Item, andproduction costs (assuming that 12 HLLVswould be produced to support the program,using 3 HLLVs for the first opportunity and 3HLLV launches at each of the remaining 3launch opportunities) were 80 percent of theETO Line Item.
To reduce the cost of the HLLVcomponent, several possible strategies couldbe used.
•Reduce the mass of systems,infrastructure, and payloads that need tobe launched into Earth orbit fortransport to Mars to support the surfacemission (assume that mission capabilityis not going to be reduced, which is alsopossible but not desirable). This couldreduce the total number of HLLVlaunches and the assumed productioncost. For example, Robert Zubrinbelieves that the program could be
carried out using two HLLV launchesper opportunity (requires somereduction of capability) (Zubrin, et al.,1991). Reducing the number of launchesfrom 12 to 8 would reduce theproduction costs by one-third and wouldreduce total costs of this element by 26percent. Developments in new materials,which are rapidly occurring, couldimprove systems performance andreduce the mass of the protective shellsand vehicle systems.
•Reduce the size of the HLLV (alsoproposed by Zubrin). This might ormight not reduce total costs, becauseadditional costs for on-orbit operationsmight be required. Reducing the cost oflaunch to LEO using reusable vehiclescurrently under consideration in thereusable launch vehicle program wouldrequire very large investments in LEOassembly. The trade-off might befavorable, but may or may not make asignificant reduction in total cost. Theavailability and use of an in-orbitassembly capability like the InternationalSpace Station could make this aneffective strategy.
•Improve the production efficiency forHLLVs. The AMCM model includes alearning curve assumption that eachtime the number of items produceddoubles, the cost per item is 78 percentof the previous production cost. Moreproduction learning could be very
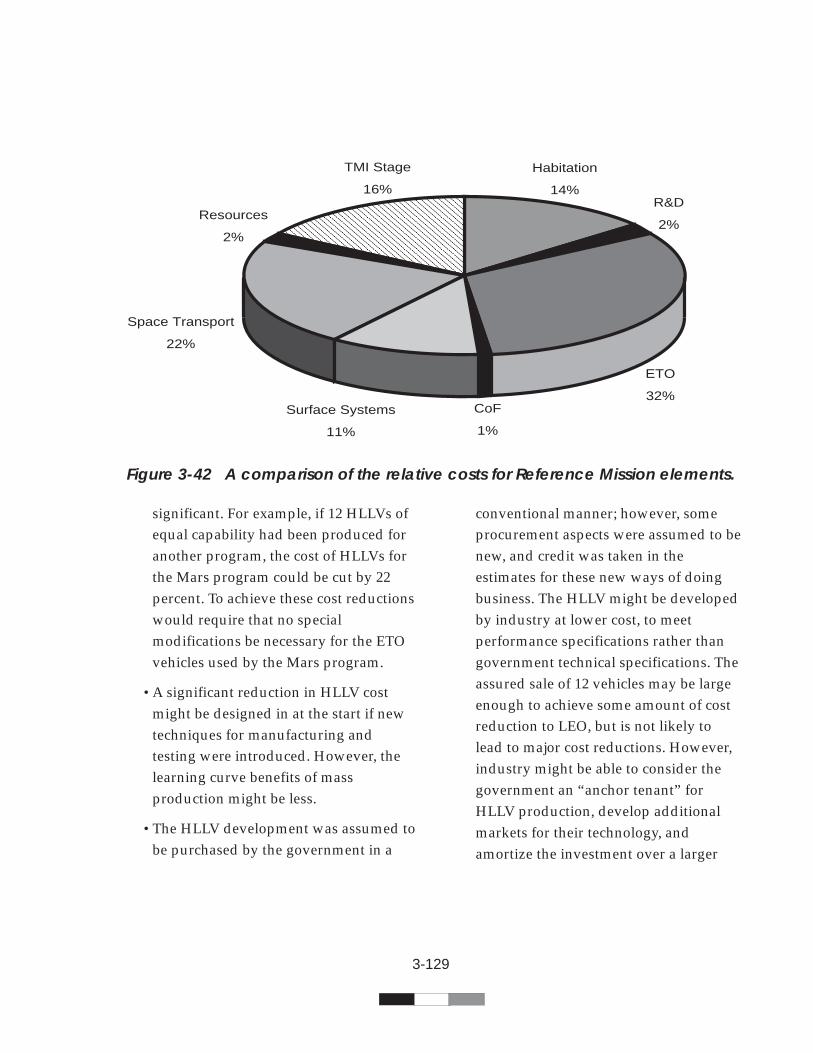
3-129
Figure 3-42 A comparison of the relative costs for Reference Mission elements.
significant. For example, if 12 HLLVs ofequal capability had been produced foranother program, the cost of HLLVs forthe Mars program could be cut by 22percent. To achieve these cost reductionswould require that no specialmodifications be necessary for the ETOvehicles used by the Mars program.
•A significant reduction in HLLV costmight be designed in at the start if newtechniques for manufacturing andtesting were introduced. However, thelearning curve benefits of massproduction might be less.
•The HLLV development was assumed tobe purchased by the government in a
conventional manner; however, someprocurement aspects were assumed to benew, and credit was taken in theestimates for these new ways of doingbusiness. The HLLV might be developedby industry at lower cost, to meetperformance specifications rather thangovernment technical specifications. Theassured sale of 12 vehicles may be largeenough to achieve some amount of costreduction to LEO, but is not likely tolead to major cost reductions. However,industry might be able to consider thegovernment an “anchor tenant” forHLLV production, develop additionalmarkets for their technology, andamortize the investment over a larger
TMI Stage
16%
Habitation
14%R&D
2%
ETO
32%CoF
1%
Surface Systems
11%
Space Transport
22%
Resources
2%

3-130
number of vehicles. This would imply anassumption that the space frontier isexpanding significantly.
•The HLLV could be supplied by theRussians or as a joint effort by multipleinternational partners. This might be acontribution to an international programwhere it would be an example of cost-sharing between partners. At the presenttime, this does not appear to be a feasiblesolution; however, it may be reasonablein 15 years. If the U. S. or other partnerswere expected to pay the Russians fortheir participation, it would require theappropriate political rationale. If theRussians were to contribute the HLLVwithout payment, it would be theequivalent of one-fourth of the totalprogram cost, though it might not costthe Russians as much as it would costthe U. S. in absolute dollars.
•Finally, innovative advances inpropulsion could result in thedevelopment of new propulsiontechniques; for example, electromagneticpropulsion for ETO could substantiallydecrease the transportation cost for somematerials (propellant).
The Earth-Mars vehicle (the TMI stage)and the Mars-Earth vehicle (the ERV)elements provide for the delivery of humansand payloads to Mars and the return ofhumans to Earth. The costs are for thetransportation elements alone (theinterplanetary habitat elements are not
included). The TMI stage was costedseparately because it was assumed to requireseparate development of a nuclear thermalpropulsion system. The TMI stage wasassumed to be jettisoned before reachingMars. Conventional space storable chemicalpropellants were assumed to be used in theERV stage to return to Earth. The nuclearthermal stage assumed considerableinheritance from the U. S. nuclear propulsionprogram that produced the NERVA engines inthe 1960s; development costs for the TMIstage were projected to be 16 percent of thetotal cost. The space transportation vehiclesare all new and include several vehicles(ascent vehicle, crew capsule, and the TEIstage). The cost of the space transportationvehicles comprises 22 percent of the total.
The ratio of development cost toproduction cost for these vehicles is ratherhigh, partly because of the smaller number ofvehicles produced for the return home.Various ways of reducing the costs of theseelements might be considered.
•Development of nuclear electric or solarelectric propulsion vehicles that are moreefficient could lower transportation costsfor cargo but might not reduce costs ofhuman flights and might increase costs ifparallel development of twotransportation systems was necessary. Ifa single technology with higherefficiency than chemical rockets could beused to go to Mars and return, much ofthe cost associated with developing thespace transportation stages might be

3-131
saved because the number of separatedevelopments would be minimized.
•Systematic application of newtechniques of automated design to thedevelopment process and use ofconcurrent engineering could reduce lifecycle costs of the systems.
•General improvements in methods ofprocurement and program managementcould have significant returns in theseareas. Reduction of integration costs canbe accomplished by centrally locatingdesign and development teams andkeeping simple interfaces betweensystems manufactured by differentproviders.
•Several vehicle elements could beprovided by international partners. Eachof the vehicles provided without cost tothe program could reduce total programcosts by several percent.
Habitats are an essential part of theReference Mission scenario. They represent 14percent of total mission cost and are assumedto have inheritance from the InternationalSpace Station program. The ReferenceMission has made the assumption that allhabitats required by the program areessentially identical, which is probably anoversimplification. To the extent the design ofspace habitats and surface habitats diverges,the cost could rise. Eight production habitatsare required. Modest learning curve costreductions are assumed for the productionline. About one-third of the estimated cost of
habitats is development, production is theremaining two-thirds. Thus, cost reductionsinvolving the improvement of design andprocurement processes are potentially themost important objectives. Note, however,that the habitats are also a significant masselement; therefore, technology that reducestheir mass will also have a significant effecton the transportation system.
Surface systems, including mobilitysystems and resource utilization systems,surface power, and other nonhabitat systems,constitute about 11 percent of the totalmission cost. Because these surface systemsare rather complex, critically determinemission productivity, and are a small fractionof the total, this area does not appear to be ahigh-priority source of major additional costreductions. However, mass reductions in thehardware will have high leverage in the spacetransportation cost elements, if the size of thetransportation vehicles or the number oflaunches can be reduced. Surface systemscosts are probably underestimated in thecurrent model, because no data for a closedLSS, EVA hardware, and science hardwarewere included in this estimate. Developmentof a suitable EVA suit will be a significanttechnology challenge and potentiallyexpensive. The closed environment LSShardware probably is not extraordinarilyexpensive. However, testing anddemonstrating it will only partially occur inthe International Space Station program, soadditional cost and risk are involved in itsdevelopment. Science equipment is not a

3-132
major cost item, in comparison with the largecosts ascribed to the transportation system.
Operations was not included as part ofthe cost analysis, but has been previouslyestimated as a proportion (historically as highas 20 percent) of the total development costs.The operations costs are incurred primarily inthe 11 years of the operational missions. Theallocation of budget that would be associatedwith this estimate is equivalent toapproximately 20,000 people per year for thatperiod of time. This is definitely an old way ofdoing business which must change for theMars missions. A reasonable target would bean operational team of approximately l,000persons. This is likely to be attainable in partbecause automation and autonomy will be anecessary characteristic of the Mars missions.A principal mechanism for reducing thesecosts may be a directed program to reduce theoperational costs of the International SpaceStation as an analog to Mars missions.
The number and type of systemsrepresented in the Reference Mission is nearminimal considering the desired surfacemission capability. It is always possible toreduce costs by reducing the requiredperformance. For example, using the sameassumptions used for this model if only asingle landing were carried out, the totalprogram costs would be reduced by about 30percent in comparison to the full three pilotedmission program. Reducing the scope of thesurface activity will not have a big effect oncost, as it is already a relatively smallproportion of total mission costs, confirming
the expectation that optimizing the surfacemission for its benefit is also the way toimprove the benefit/cost ratio for the humanexploration of Mars.
The question of management style mustnow be addressed. Particular attention needsto be paid to the process by which theproduction elements are procured. Thecurrent estimates probably are still influencedby current ways of doing business. If totalReference Mission costs are to be reduced, it isat this level of effort that the most effectivechanges can be made. Focusing on the wrapfactors may not accomplish significantadditional reductions, although reducing theproduction costs will also reduce the amountthat must be spent in these areas.
3.9.2 Management and OrganizationalStructure
Organization and management is one ofthe principal determinants of program cost.This is a rather wide-ranging topic, which isnot entirely divisible from the technicalcontent of the program, because it includesprogram level decision making that isintimately tied to the system engineeringdecision-making process.
The magnitude of the Reference Mission,once it has been initiated, is enormous. Manygood examples exist of smaller programs thathave failed or have not performed well due tomanagement deficiencies. Thus, as theReference Mission is examined and improved,continued consideration should be given tostreamlining its management; assigning
3-133
authority, responsibility, and accountability atthe right levels; and developing processes thatare simple, with clear-cut interfaces andmeasurable performance standards.
The relationship between cost andmanagement style and organizational cultureis rather well-known in a general manner,through a large number of lessons learnedanalyses made postprogram. The list of keyelements of lower-cost programs is shown inTable 3-26. These have been pointed out in aseries of analyses, but have not commonlybeen applied at the critical stage ofdeveloping program organization andmanagement approaches. Rather, theorganizational and management style hasbeen determined rather late in the program,generally because the program content andfinal design were typically delayed throughredesign, changing requirements, andfunding irregularities.
To manage a Mars program to a lowestpossible cost, a number of considerationshave been identified.
•The design of the organization andmanagement system should be an areaof investigation in subsequent studies ofthe Reference Mission. The relationshipbetween program cost and programculture is illustrated in Figure 3-46.Although several factors are involved,this figure indicates that significant costimpacts are tied to the organizationalculture and the management system.
•The human exploration of Mars will behighly visible to the world, will be a toolof international policy in manycountries, will be complex andexpensive, and will take several years todevelop. Under these conditions, it isessential that a philosophical andbudgetary agreement be reached prior toinitiating development. A formalagreement should be reached betweenall parties as to the objectives andrequirements that are imposed on themission before development is initiated,and an agreement to fund the project toits completion should be reached prior todevelopment. In the U. S., this wouldinclude multiyear budgetary authority.This should be accompanied by amanagement process that would protectagainst program overruns throughappropriate incentives.
•The human exploration of Mars willhave quite different risks than any spacemission which will have beenundertaken at its time. These includerisks to the safety of the crew andaccomplishment of the mission(primarily technical risks) and risks ofmeeting cost and schedule objectives.Maintaining launch schedule isexceedingly important, due to thedependency on several successfullaunches for mission success and thehigh cost of missed launch windows(missed launch windows imply 2-yearprogram delays at potentially high

3-134
Table 3-26 Key Elements of Lower-Cost Programs
• Use government to define only requirements• Keep requirements fixed; once requirements are stated, only relax them; never add new
ones• Place product responsibility in a competitive private sector• Specify end results (performance) of products, not how to achieve the results• Minimize government involvement (small program office)• Ensure that all technologies are proven prior to the end of competition• Use the private sector reporting reporting system: reduce or eliminate specific
government reports• Don't start a program until cost estimate and budget availability match• Reduce development time: any program development can be accomplished in 3 to 4
years once uncertainties are resolved• Force people off development programs when development is complete• Incentivize the contractor to keep costs low (as opposed to CPAF, CPFF, or NASA)• Use goegraphic proximity of contractor organizations when possible• Use the major prime contractor as the integrating contractor
program cost). Thus a risk managementplan can help identify the risks andformulate a mitigation strategy.
•The Reference Mission requires anumber of elements, many of which aretechnically alike but serve somewhatdifferent functions over the duration ofthe program. For example, the surfacehabitat may be the basis for the transithabitat, and each habitat delivered to thesurface will have a different complementof equipment and supplies, according toits position in the delivery sequence. Theelements will be developed over aperiod of several years, and there will bea temptation to improve the equipmentand supply manifest. It will be importantfor requirements to be fixed at the timeof initial development to maintain cost
control for the program. To accomplishthis:
-There should be a clear demarcationbetween the design phase and thedevelopment/production phase of theproject, and development should notbegin before the design phase is ended.
-All technologies should be proved priorto initiation of production of programelements.
-Once the requirements have beenestablished, they should not be changedunless they can be relaxed.
-A system should be developed thatdocuments the relationship andinteraction of all requirements andshould be available for use prior to thebeginning of production.
3-135
•The design phase of the program iscritical to successful cost control. Thedesign should be based on a set offunctional requirements established by aProgram Office, which may well be amultinational activity. The ProgramOffice should be in place to managetechnical requirements, providedecisions that require consultation andtrade-offs (technical and political), andmanage development contracts. TheProgram Office should also establishfunctional requirements for the designphase and conduct a competitiveprocurement for the design phase withthe selection of a prime contractor. Toaccomplish this:
-Requirements should be provided for thedesign phase, describing theperformance expected, and a clear set ofcriteria for completeness of design as afunction of resources expended indesign.
-A significant design cost margin shouldbe used to manage the design resources.
-The successful prime contractor shouldbe selected as integration contractor forthe development phase.
•Once committed to development, thedevelopment time should be strictlylimited if costs are to be contained. Thiswill be difficult in the Mars program,where it probably will be effective toproduce common elements sequentiallyrather than all at one time, although
there may be a high enough productionrate that costs will drop as experience isgained. A new approach will be neededto ensure that the development time foreach individual element is strictlylimited.
•The program will require two levels ofintegration, similar to that of theInternational Space Station program: aprogram level which ensures that overallmission requirements will be met at eachstage of the mission, and a launchpackage level integration in which allrequired elements of each launch toMars are packaged and theirperformance ensured. To accomplishthis, both aspects of integration shouldbe the responsibility of a singleorganization, a prime contractor to theProgram Office.
•The operational phase of the Marsprogram must be represented in thedesign and development phase. This willrequire a concurrent engineeringapproach which considers theoperational costs as well as thedevelopment costs in a life cycle costapproach to the program. To accomplishthis, operational considerations must beincluded in the design and developmentphases of the program, and life cyclecosts should be used as the determinantfor program design and developmentdecisions.

3-136
•Finally, at all stages of design,development, production, andoperations, all program office officialsand contractor organizations must beincentivized to maintain program costswithin approved levels, and positiveincentives must be put into place toreduce costs of each phase of theprogram.
3.9.3 Technology Development
The Reference Mission was developedwith advances assumed in certain technologyareas known to be necessary to send people toMars for a reasonable investment in time andresources. The same objective could besatisfied using other technologies in somecases, making it necessary to identifyselection criteria for the set of technologies theReference Mission should favor. A reasonableinvestment also implies that there must besome reliance on technologies developed forother uses or simply discovered during someother development activity.
Dual-use technologies are those whichare deliberately developed with more thanone application in mind and which carryrequirements for these various uses throughthe development period. Spin off or spin intechnologies are those which are developedwith a specific application in mind but whichfind other uses with little or no additionaldevelopment work. Spill over technologiesare those which grow to include entirely new,unplanned technologies as a by-product of
the effort to bring the original technology toits desired state.
At this particular stage in developinghuman exploration missions to Mars, it isdifficult to do more than speculate about spinoff and spill over technologies that couldresult from, or be useful to, this endeavor.However, identifying dual uses for some ofthe assumed technologies can be started nowand, to a certain degree, will be required forsuch a program to progress. In the currentpolitical environment, investment intechnology is seen as a means of improvingthe general quality of life, and multiple use oftechnologies is emphasized to obtain the bestreturn on the resources invested in theirdevelopment. Space programs are not sparedthis requirement. A program strategy thatemphasizes dual-use technologies, besidesbeing consistent with this current trend could:
•More easily generate funds throughincreased cooperation and joint ventureswith other U.S. federal agencies,international partners, and commercialconcerns
•Provide smaller projects which could bemore easily funded
•Provide a step-by-step approach to theReference Mission
•Provide a stimulus to local and nationaleconomies
•Foster an increase in advocacy for spaceprograms

3-137
To this end, the Reference Mission studyidentified and worked with 10 Mars mission-related technology categories: propulsion,communications and information systems,ISRU, surface mobility - suits, surfacemobility - vehicles, human support, power,structures and materials, science and scienceequipment, and operations and maintenance.These categories were then associated with atotal of 54 technology areas along with theirapplications. Tables 3-27 through 3-36document these various technologyapplications. In addition, the tables indicatewhere these technologies may spin off intoother applications and where developmentsin other areas may, in fact, benefit or spin intothe Mars program.
Not all of the advantageous technologyfor the Reference Mission must be developedby the program organization. Internationalcooperation can benefit from the technologyadvancements needed for this class of spacemission. Two obvious examples includeheavy lift launch technology and space-basednuclear power. The relatively heavy liftlaunch capabilities either developed ornearing completion for the Russian Energiaand the European Ariane V could form thebasis for at least part of a cooperativetechnology development program. Theformer Soviet Union had also developed arelatively sophisticated operational space-based nuclear power capability.
U.S. federal agencies can also cooperateto develop mutually beneficial technologies.The long-standing cooperation between
NASA and the Department of Energy todevelop small nuclear power sources forrobotic spacecraft could be expanded toinclude the development of larger powersources (perhaps as part of a cooperativeendeavor with the Russian government) orfor the propulsion system technologiesassumed for the Reference Mission. TheDepartment of Defense is currently studyingan integrated propulsion and electrical powersystem driven by the heat of the Sun(Reference: Anon., 1995). This could be atechnology useful to the Reference Mission asan alternative to the nuclear system assumedand form the basis for a cooperativedevelopment program.
Several specific examples may helpillustrate how technology development forthe Reference Mission will benefit from spillover, spin off, and dual-usage.
One of the precursor activities to theReference Mission that has a high priority willbe the characterization of the martian surfacein great detail by orbiting robotic spacecraft.Data collected by this vehicle or vehicles willbe needed in many areas to prepare for thisReference Mission. One of the mostsignificant areas will be the choice of alanding site at which the outpost will beestablished. This selection will be based inpart on information ranging from hazards inthe proposed landing zone to the proximity ofthe site to a variety of surface features, theinvestigation of which will contribute tomeeting the overall Reference Missionobjectives. Technology to obtain this remote

3-138
sensing data could be available from the U.S.,Russia, Japan, and the Europeans, based ontheir previous Earth-orbiting, remote-sensingmissions and other planetary explorations.But due to the high cost of transporting thesesensors to the vicinity of Mars, furtherdevelopment or enhancement of thesetechnologies could reduce their size, mass,and need for supporting resources (power,communications band width, etc.).Advancements in other areas, such as the Kaband utilization, data compression, andinformation processing technologiesmentioned in the Communication andInformation Systems category or fromtechnology developed as part of the explosivegrowth in the PC marketplace, can also serveto improve performance and reduce costs forthese systems and the data they return. Anytechnology enhancement developed tosupport the Reference Mission will then beavailable for use in Earth-orbitingapplications.
The single largest cost of a human Marsexploration program may be the cost of ETOtransportation. The development of a newHLLV solely for the Mars program couldrequire up to 30 percent of the total resourcesfor the program. However, approaches thatcan launch the appropriate payloads to Marsusing smaller launch vehicles have notappeared to be viable in the past. This is aconundrum which has and may still stymiehuman exploration of Mars. Other avenuesexist:
•The Russian Energia heavy lift launchsystem can be maintained and upgradeduntil human missions to Mars can begin.A variation of this would be to evolve ahigher capacity launch vehicle usingtechnologies developed for Energia,Ariane V, and the Space Shuttle. Either ofthese options would offer anopportunity for internationalcooperation that would not only benefitthe Reference Mission but also allow forheavier, more sophisticated payloads tobe launched into Earth orbit or used forlunar missions.
•The mass of hardware required tosupport humans in Mars journeys can bereduced. Few concepts now exist forthis, but advancements in the technologyoptions mentioned in most, if not all, ofthe 10 categories identified by the MarsStudy Team will lead to a reduction inthe hardware mass that must be sent toMars. Each of the 10 categories alsoidentified Earth-bound applications thatmay also benefit from theseadvancements.
A third example involves the significantlevel of automation assumed for theReference Mission. The program assumesinfrastructure elements (including a system toproduce propellant and life supportconsumables, the first of two habitats, powersystems, and surface transportation elements)will robotically land on the surface at adesignated location. All of these systems willbe delivered, set up, and checked out using
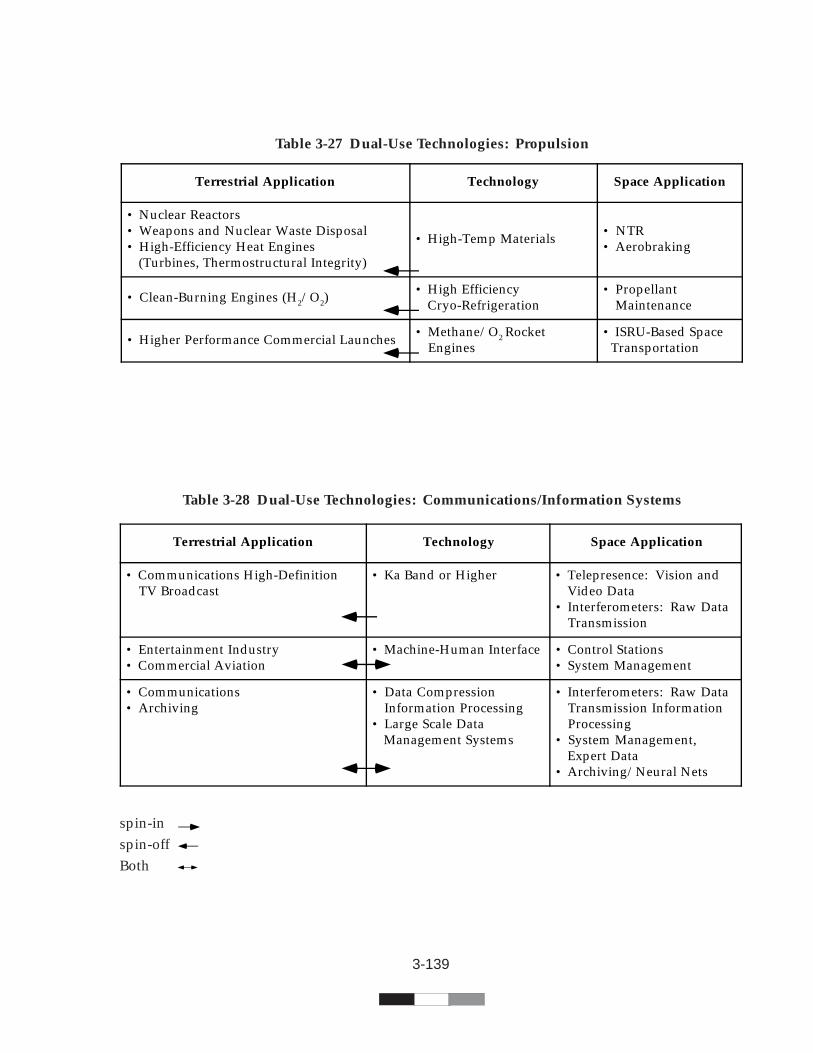
3-139
Table 3-28 Dual-Use Technologies: Communications/Information Systems
spin-inspin-offBoth
Terrestrial Application Technology Space Application
• Communications High-Definition TV Broadcast
• Ka Band or Higher • Telepresence: Vision and Video Data• Interferometers: Raw Data Transmission
• Entertainment Industry• Commercial Aviation
• Machine-Human Interface • Control Stations• System Management
• Communications• Archiving
• Data Compression Information Processing• Large Scale Data Management Systems
• Interferometers: Raw Data Transmission Information Processing• System Management, Expert Data• Archiving/Neural Nets
Terrestrial Application Technology Space Application
• Nuclear Reactors• Weapons and Nuclear Waste Disposal• High-Efficiency Heat Engines (Turbines, Thermostructural Integrity)
• High-Temp Materials • NTR• Aerobraking
• Clean-Burning Engines (H2/O2)• High Efficiency Cryo-Refrigeration
• Propellant Maintenance
• Higher Performance Commercial Launches • Methane/O2 Rocket Engines
• ISRU-Based Space Transportation
Table 3-27 Dual-Use Technologies: Propulsion
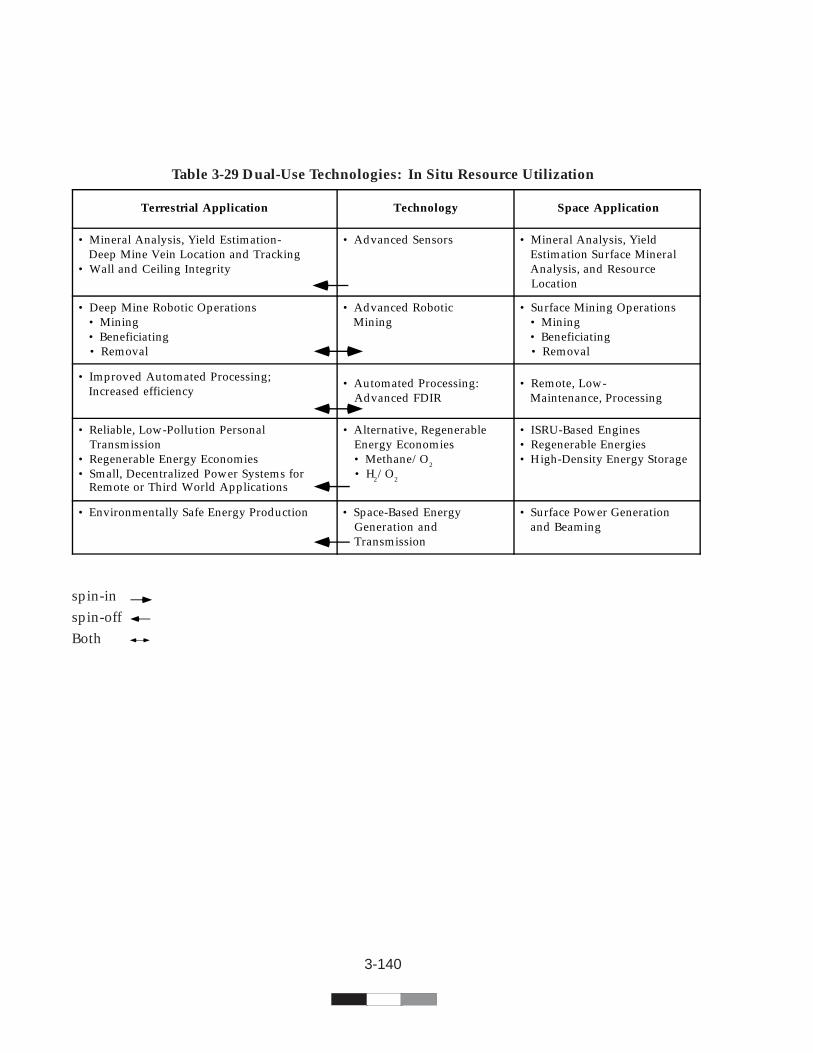
3-140
spin-inspin-offBoth
Terrestrial Application Technology Space Application
• Mineral Analysis, Yield Estimation- Deep Mine Vein Location and Tracking• Wall and Ceiling Integrity
• Advanced Sensors • Mineral Analysis, Yield Estimation Surface Mineral Analysis, and Resource Location
• Deep Mine Robotic Operations • Mining • Beneficiating • Removal
• Advanced Robotic Mining
• Surface Mining Operations • Mining • Beneficiating • Removal
• Improved Automated Processing; Increased efficiency
• Automated Processing: Advanced FDIR
• Remote, Low- Maintenance, Processing
• Reliable, Low-Pollution Personal Transmission• Regenerable Energy Economies• Small, Decentralized Power Systems for Remote or Third World Applications
• Alternative, Regenerable Energy Economies • Methane/O2
• H2/O2
• ISRU-Based Engines• Regenerable Energies• High-Density Energy Storage
• Environmentally Safe Energy Production • Space-Based Energy Generation and Transmission
• Surface Power Generation and Beaming
Table 3-29 Dual-Use Technologies: In Situ Resource Utilization
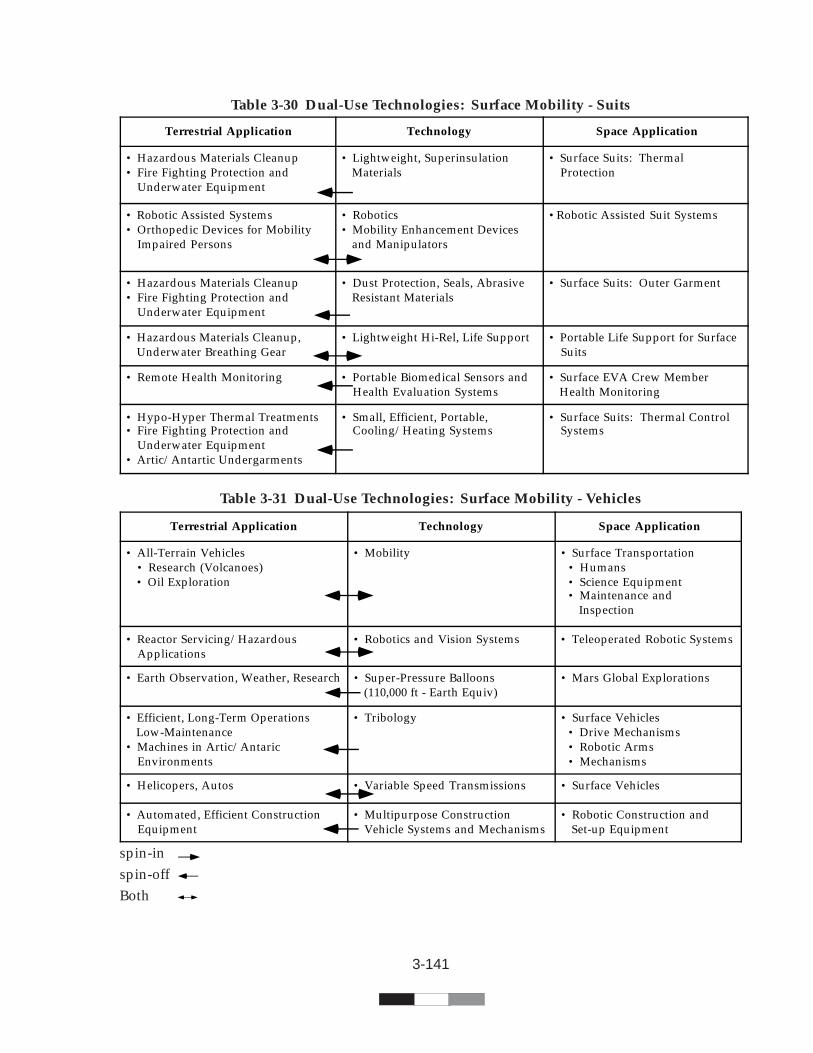
3-141
Terrestrial Application Technology Space Application
• Hazardous Materials Cleanup• Fire Fighting Protection and Underwater Equipment
• Lightweight, Superinsulation Materials
• Surface Suits: Thermal Protection
• Robotic Assisted Systems• Orthopedic Devices for Mobility Impaired Persons
• Robotics• Mobility Enhancement Devices and Manipulators
•Robotic Assisted Suit Systems
• Hazardous Materials Cleanup• Fire Fighting Protection and Underwater Equipment
• Dust Protection, Seals, Abrasive Resistant Materials
• Surface Suits: Outer Garment
• Hazardous Materials Cleanup, Underwater Breathing Gear
• Lightweight Hi-Rel, Life Support • Portable Life Support for Surface Suits
• Remote Health Monitoring • Portable Biomedical Sensors and Health Evaluation Systems
• Surface EVA Crew Member Health Monitoring
• Hypo-Hyper Thermal Treatments• Fire Fighting Protection and Underwater Equipment• Artic/Antartic Undergarments
• Small, Efficient, Portable, Cooling/Heating Systems
• Surface Suits: Thermal Control Systems
Table 3-30 Dual-Use Technologies: Surface Mobility - Suits
Table 3-31 Dual-Use Technologies: Surface Mobility - Vehicles
spin-inspin-offBoth
Terrestrial Application Technology Space Application
• All-Terrain Vehicles • Research (Volcanoes) • Oil Exploration
• Mobility • Surface Transportation • Humans • Science Equipment • Maintenance and Inspection
• Reactor Servicing/Hazardous Applications
• Robotics and Vision Systems • Teleoperated Robotic Systems
• Earth Observation, Weather, Research • Super-Pressure Balloons (110,000 ft - Earth Equiv)
• Mars Global Explorations
• Efficient, Long-Term Operations Low-Maintenance• Machines in Artic/Antaric Environments
• Tribology • Surface Vehicles • Drive Mechanisms • Robotic Arms • Mechanisms
• Helicopers, Autos • Variable Speed Transmissions • Surface Vehicles
• Automated, Efficient Construction Equipment
• Multipurpose Construction Vehicle Systems and Mechanisms
• Robotic Construction and Set-up Equipment
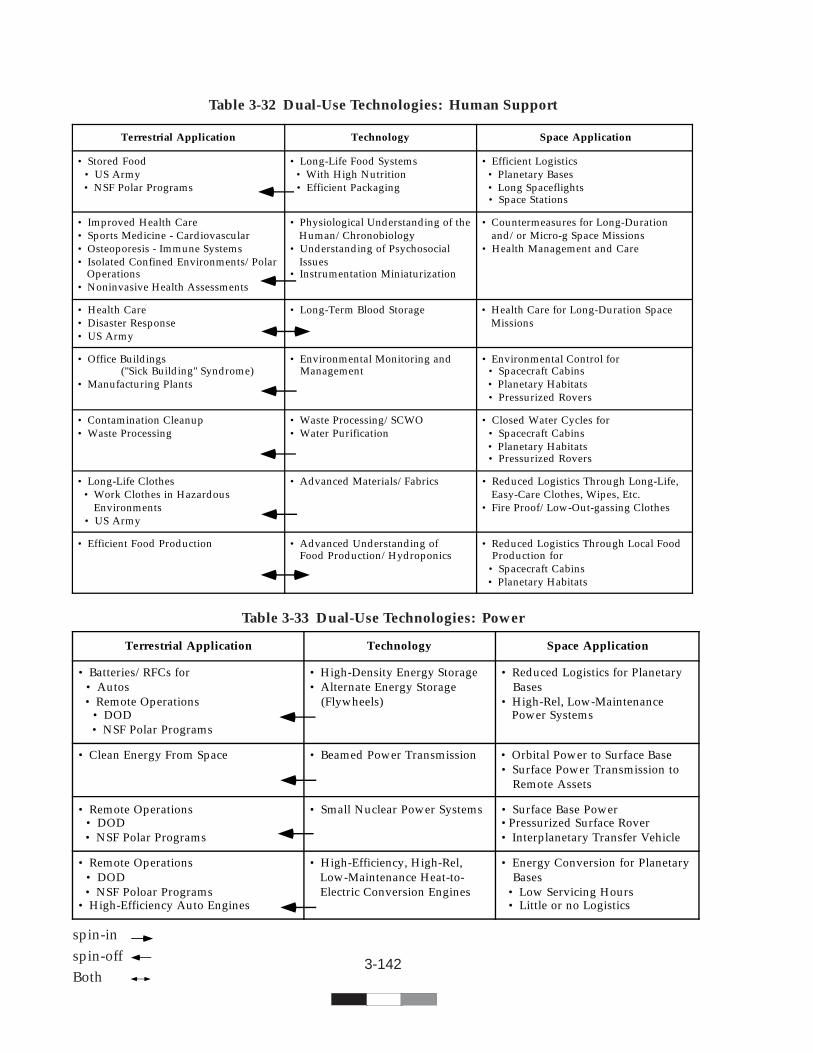
3-142
Table 3-33 Dual-Use Technologies: Power
Table 3-32 Dual-Use Technologies: Human Support
spin-inspin-offBoth
Terrestrial Application Technology Space Application
• Stored Food • US Army • NSF Polar Programs
• Long-Life Food Systems • With High Nutrition • Efficient Packaging
• Efficient Logistics • Planetary Bases • Long Spaceflights • Space Stations
• Improved Health Care• Sports Medicine - Cardiovascular• Osteoporesis - Immune Systems• Isolated Confined Environments/Polar Operations• Noninvasive Health Assessments
• Physiological Understanding of the Human/Chronobiology• Understanding of Psychosocial Issues• Instrumentation Miniaturization
• Countermeasures for Long-Duration and/or Micro-g Space Missions• Health Management and Care
• Health Care• Disaster Response• US Army
• Long-Term Blood Storage • Health Care for Long-Duration Space Missions
• Office Buildings("Sick Building" Syndrome)
• Manufacturing Plants
• Environmental Monitoring and Management
• Environmental Control for • Spacecraft Cabins • Planetary Habitats • Pressurized Rovers
• Contamination Cleanup• Waste Processing
• Waste Processing/SCWO• Water Purification
• Closed Water Cycles for • Spacecraft Cabins • Planetary Habitats • Pressurized Rovers
• Long-Life Clothes • Work Clothes in Hazardous Environments • US Army
• Advanced Materials/Fabrics • Reduced Logistics Through Long-Life, Easy-Care Clothes, Wipes, Etc.• Fire Proof/Low-Out-gassing Clothes
• Efficient Food Production • Advanced Understanding of Food Production/Hydroponics
• Reduced Logistics Through Local Food Production for • Spacecraft Cabins • Planetary Habitats
Terrestrial Application Technology Space Application
• Batteries/RFCs for • Autos • Remote Operations • DOD • NSF Polar Programs
• High-Density Energy Storage• Alternate Energy Storage (Flywheels)
• Reduced Logistics for Planetary Bases• High-Rel, Low-Maintenance Power Systems
• Clean Energy From Space • Beamed Power Transmission • Orbital Power to Surface Base• Surface Power Transmission to Remote Assets
• Remote Operations • DOD • NSF Polar Programs
• Small Nuclear Power Systems • Surface Base Power•Pressurized Surface Rover• Interplanetary Transfer Vehicle
• Remote Operations • DOD • NSF Poloar Programs• High-Efficiency Auto Engines
• High-Efficiency, High-Rel, Low-Maintenance Heat-to- Electric Conversion Engines
• Energy Conversion for Planetary Bases • Low Servicing Hours • Little or no Logistics
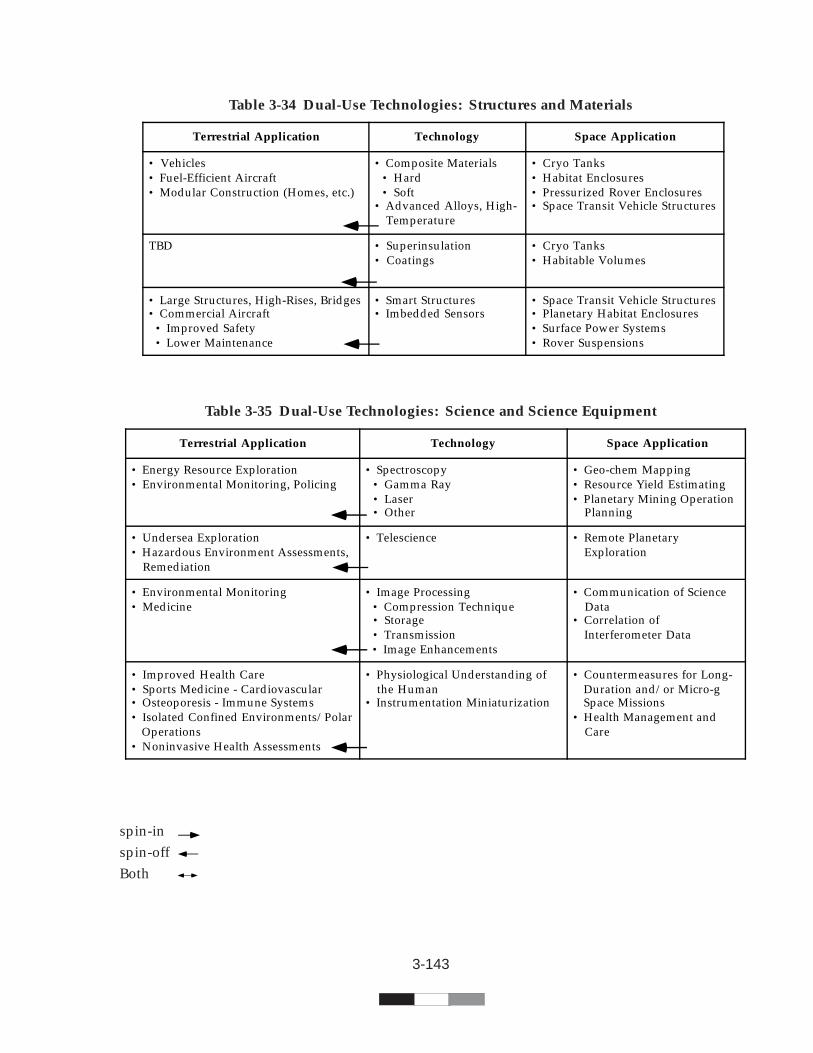
3-143
Table 3-34 Dual-Use Technologies: Structures and Materials
Table 3-35 Dual-Use Technologies: Science and Science Equipment
spin-inspin-offBoth
Terrestrial Application Technology Space Application
• Vehicles• Fuel-Efficient Aircraft• Modular Construction (Homes, etc.)
• Composite Materials • Hard • Soft• Advanced Alloys, High- Temperature
• Cryo Tanks• Habitat Enclosures• Pressurized Rover Enclosures• Space Transit Vehicle Structures
TBD • Superinsulation• Coatings
• Cryo Tanks• Habitable Volumes
• Large Structures, High-Rises, Bridges• Commercial Aircraft • Improved Safety • Lower Maintenance
• Smart Structures• Imbedded Sensors
• Space Transit Vehicle Structures• Planetary Habitat Enclosures• Surface Power Systems• Rover Suspensions
Terrestrial Application Technology Space Application
• Energy Resource Exploration• Environmental Monitoring, Policing
• Spectroscopy • Gamma Ray • Laser • Other
• Geo-chem Mapping• Resource Yield Estimating• Planetary Mining Operation Planning
• Undersea Exploration• Hazardous Environment Assessments, Remediation
• Telescience • Remote Planetary Exploration
• Environmental Monitoring• Medicine
• Image Processing • Compression Technique • Storage • Transmission • Image Enhancements
• Communication of Science Data• Correlation of Interferometer Data
• Improved Health Care• Sports Medicine - Cardiovascular• Osteoporesis - Immune Systems• Isolated Confined Environments/Polar Operations• Noninvasive Health Assessments
• Physiological Understanding of the Human• Instrumentation Miniaturization
• Countermeasures for Long- Duration and/or Micro-g Space Missions• Health Management and Care
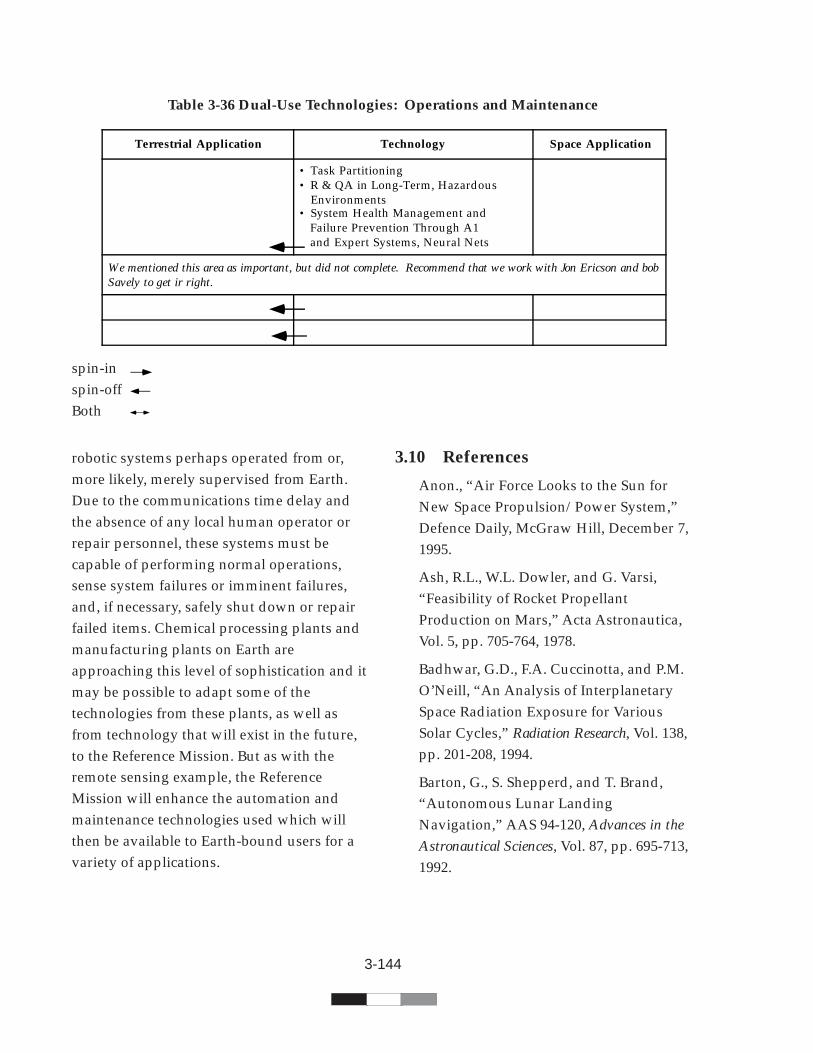
3-144
robotic systems perhaps operated from or,more likely, merely supervised from Earth.Due to the communications time delay andthe absence of any local human operator orrepair personnel, these systems must becapable of performing normal operations,sense system failures or imminent failures,and, if necessary, safely shut down or repairfailed items. Chemical processing plants andmanufacturing plants on Earth areapproaching this level of sophistication and itmay be possible to adapt some of thetechnologies from these plants, as well asfrom technology that will exist in the future,to the Reference Mission. But as with theremote sensing example, the ReferenceMission will enhance the automation andmaintenance technologies used which willthen be available to Earth-bound users for avariety of applications.
3.10 References
Anon., “Air Force Looks to the Sun forNew Space Propulsion/Power System,”Defence Daily, McGraw Hill, December 7,1995.
Ash, R.L., W.L. Dowler, and G. Varsi,“Feasibility of Rocket PropellantProduction on Mars,” Acta Astronautica,Vol. 5, pp. 705-764, 1978.
Badhwar, G.D., F.A. Cuccinotta, and P.M.O’Neill, “An Analysis of InterplanetarySpace Radiation Exposure for VariousSolar Cycles,” Radiation Research, Vol. 138,pp. 201-208, 1994.
Barton, G., S. Shepperd, and T. Brand,“Autonomous Lunar LandingNavigation,” AAS 94-120, Advances in theAstronautical Sciences, Vol. 87, pp. 695-713,1992.
Table 3-36 Dual-Use Technologies: Operations and Maintenance
Terrestrial Application Technology Space Application
• Task Partitioning• R & QA in Long-Term, Hazardous Environments• System Health Management and Failure Prevention Through A1 and Expert Systems, Neural Nets
We mentioned this area as important, but did not complete. Recommend that we work with Jon Ericson and bobSavely to get ir right.
spin-inspin-offBoth
3-145
Borowski, S.K., R.R. Corban, M.L.McGuire, and E.G. Beke, “NuclearThermal Rocket/Vehicle Design Optionsfor Future NASA Missions to the Moonand Mars,” NASA TM-107071, 1993.
Buoni, C. and L. Guerra “Use of AntarcticAnalogs to Support the Space ExplorationInitiative,” a special report prepared byScience Applications InternationalCorporation for NASA, Office ofExploration and NSF, Department of PolarPrograms, December 1990.
Clearwater, Y., “Human Factors and CrewSize Studies,” Presentation at MarsExploration Study Workshop II, NASAConference Publication 3243, conferenceheld at NASA Ames Research Center, May24-25, 1993.
Cohen, M., “Mars 2008 Surface HabitationStudy,” Presentation at the MarsExploration Study Workshop II, NASAConference Publication 3243, conferenceheld at NASA Ames Research Center, May24-25, 1993.
Colvin, J., P. Schallhorn, and K. Ramohalli,“Propellant Production on Mars: SingleCell Oxygen Production Test Bed,” AIAAPaper 91-2444, June 1991.
Cruz, M.I., R.F. Armento, and W.H. Giles,“Aerocapture—A System Design forPlanetary Exploration,” 30th Congress ofthe International Astronautics Federation,IAF 79-160, September 19, 1979.
Cyr, K.J., “Cost Estimating Methods forAdvanced Space Systems,” SAWE PaperNo. 1856, Society of Allied WeightEngineers 47th Annual Conference, heldin Plymouth, Michigan, May 23-24, 1988.
Drake, B., “Mars Transfer Time SensitivityAnalysis,” Presentation to the T. StaffordSynthesis Group, January 14, 1991.
Duke, M. and N. Budden, “Results,Proceedings and Analysis of the MarsExploration Workshop,” JSC-26001, NASAJohnson Space Center, Houston, Texas,August 1992.
Huber, W., “Space Transportation SystemsWorking Group,” Presentation at the MarsExploration Study Workshop II, NASAConference Publication 3243, conferenceheld at NASA Ames Research Center, May24-25, 1993.
Jacobs, M.K., J.C. Collins, and M.L.Stancati, “Assessment of Potential Benefitsfrom Lunar/Mars Propellant Productionfor Support of Human Exploration of theMoon and Mars,” 42nd Congress of theInternational Astronautical Federation, IAF-91-658, held in Montreal, Canada, October5-11, 1991.
Joosten, B., B. Drake, D. Weaver, and J.Soldner, “Mission Design Strategies forthe Human Exploration of Mars,” 42ndCongress of the International AstronauticalFederation, IAF-91-336, held in Montreal,Canada, October 5-11, 1991.
3-146
Joosten, B. and L. Guerra, “Early LunarResource Utilization: A Key to HumanExploration,” AIAA Space Programs andTechnologies Conference, AIAA 93-4784,held in Huntsville, Alabama, September21-23, 1993.
McKay, D., E. Gibson, Jr., K. Thomas-Keprta, H. Vali, C. Romanek, S. Clemett,X. Chillier, C. Maechling, and R. Zare,“Search for Past Life on Mars: PossibleRelic Biogenic Activity in MartianMeteorite ALH 84001,” Science, Vol. 273,pp. 924-930, August 16, 1996.
NASA, “Report of the 90-Day Study onHuman Exploration of the Moon andMars,” NASA Headquarters, Washington,DC, November 1989.
NASA, “Strategic Considerations forSupport of Humans in Space and Moon/Mars Exploration Missions: Life SciencesResearch and Technology Programs,”NASA Advisory Council AerospaceMedicine Advisory Committee Report,June 1992.
Ramohalli, K., E. Lawton and R. Ash,“Recent Concepts in Missions to Mars:Extraterrestrial Processes,” Journal ofPropulsion and Power, Vol. 5, No. 2, pp. 181-187, 1989.
Reschke, M., D. Harm, D. Parker, G.Sandoz, J. Homick, and J. Vanderploeg,“Neurophysiologic Aspects: SpaceMotion Sickness.” In: Space Physiology andMedicine, edited by Nicogossian, A.E.,Huntoon, C.L., and Pool, S.L.,
Philadelphia, Lea & Febiger, pp. 229-230,1994.
Scott, C.D., B.B. Roberts, K. Nagy, P.Taylor, J.D. Gamble, C.J. Cerimele, K.R.Knoll, C.P. Li, and R.C. Reid, “DesignStudy of an Integrated Aerobraking OrbitTransfer Vehicle,” NASA TM-58264, 1985.
Simonsen, L., J. Nealy, L. Townsend, and J.Wilson, “Radiation Exposure for MannedMars Surface Missions,” NASA TP-2979,1990.
Stancati, M.L., J.C. Niehoff, W.C. Wells,and R.L. Ash, “In Situ PropellantProduction: A New Potential for Round-Trip Spacecraft,” AIAA/NASAConference on Advanced Technology forFuture Space Systems, AIAA 79-0906, heldin Hampton, Virginia, May 1979.
Stancati, M.L. and J.T. Collins, “MissionDesign Considerations for Nuclear RiskMitigation,” Proceedings of the NuclearTechnology Interchange Meeting, R.R.Corban, ed., NASA ConferencePublication 10116, Vol. 1, pp. 358-365,October 20-23, 1992.
Sridhar, K.R. and V.A. Iyer, “ThermalAnalysis of a Mars Oxygen ProductionPlant,” 42nd Congress of the InternationalAstronautical Federation, IAF-91-671, heldin Montreal, Canada, October 5-11, 1991.
Sullivan, T., D. Linne, L. Bryant, and K.Kennedy, “In Situ-Produced Methane andMethane/Carbon Monoxide Mixtures forReturn Propulsion from Mars,” Journal of
3-147
Propulsion and Power, Vol. 11, No. 5, pp.1056-1062, 1995.
Townsend, L., J. Nealy, J. Wilson, and L.Simonsen, “Estimates of Galactic CosmicRadiation Shielding Requirements DuringSolar Maximum,” NASA TM-4167, 1990.
Withraw, C. A. and N. Morales, “SolarElectrochemical Power Systems for a MarsMission,” NASA TM-106606, 1993.
Zubrin, R., D. Baker, and O. Gwynne,“Mars Direct: A Simple, Robust, and CostEffective Architecture for the SpaceExploration Initiative,” 29th AerospaceSciences Meeting, AIAA 91-0326, held inReno, Nevada, January 7-10, 1991.


1-1
National Aeronautics andSpace Administration
Lyndon B. Johnson Space Center