Holograms are the Next Video - ACM Multimedia Systems ...
74
Holograms are the Next Video Philip A. Chou, 8i Labs, Inc. ACM Multimedia Systems Conference 13 June 2018
Transcript of Holograms are the Next Video - ACM Multimedia Systems ...
Holograms are the Next VideoPhilip A. Chou, 8i Labs, Inc.
ACM Multimedia Systems Conference13 June 2018

Star Wars Episode IV, 1977
Princess Leia

Star Trek Next Generation, Episode 12, 1988
The Holodeck

Black Panther, 2018
Solo, 2018
“No, you can’t wipe `em off. They’re holograms.” – Tobias Becket to Chewbacca.

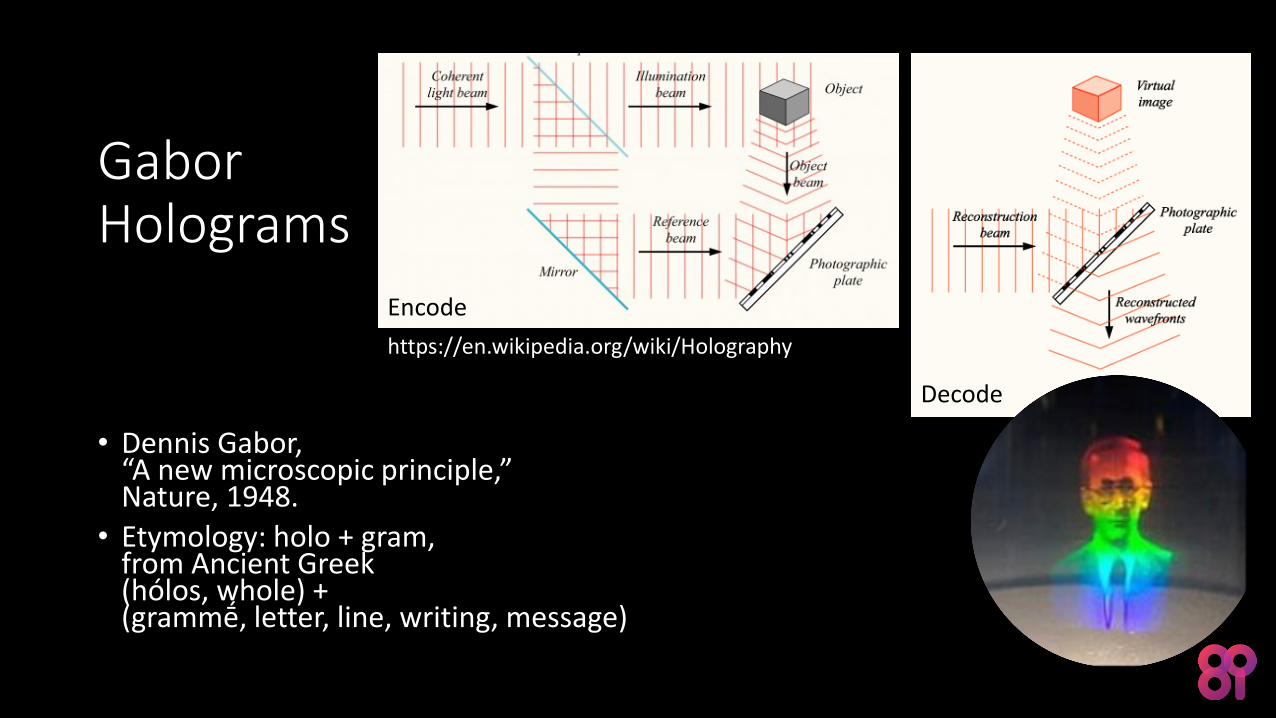
GaborHolograms
• Dennis Gabor,“A new microscopic principle,”Nature, 1948.
• Etymology: holo + gram,from Ancient Greek(hólos, whole) +(grammḗ, letter, line, writing, message)
Decode
Encode
https://en.wikipedia.org/wiki/Holography
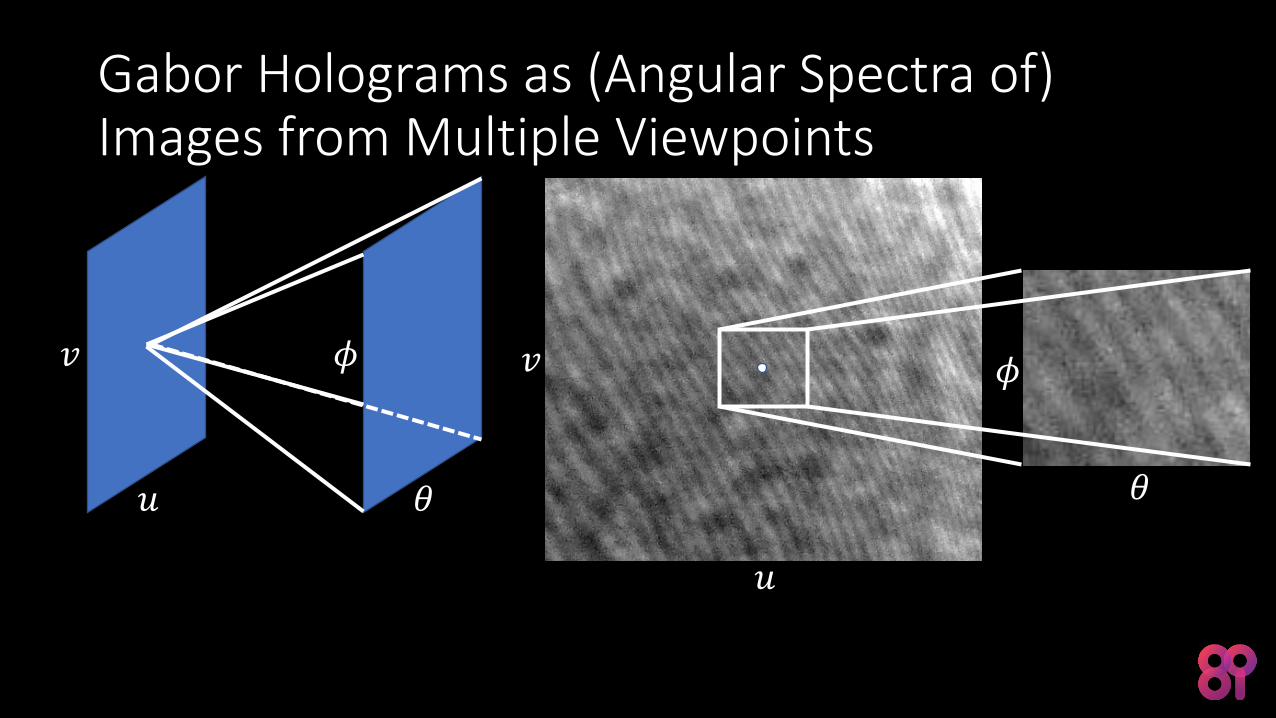
Gabor Holograms as (Angular Spectra of) Images from Multiple Viewpoints
𝑣
𝑢 𝜃
𝜙 𝑣
𝑢
𝜃
𝜙
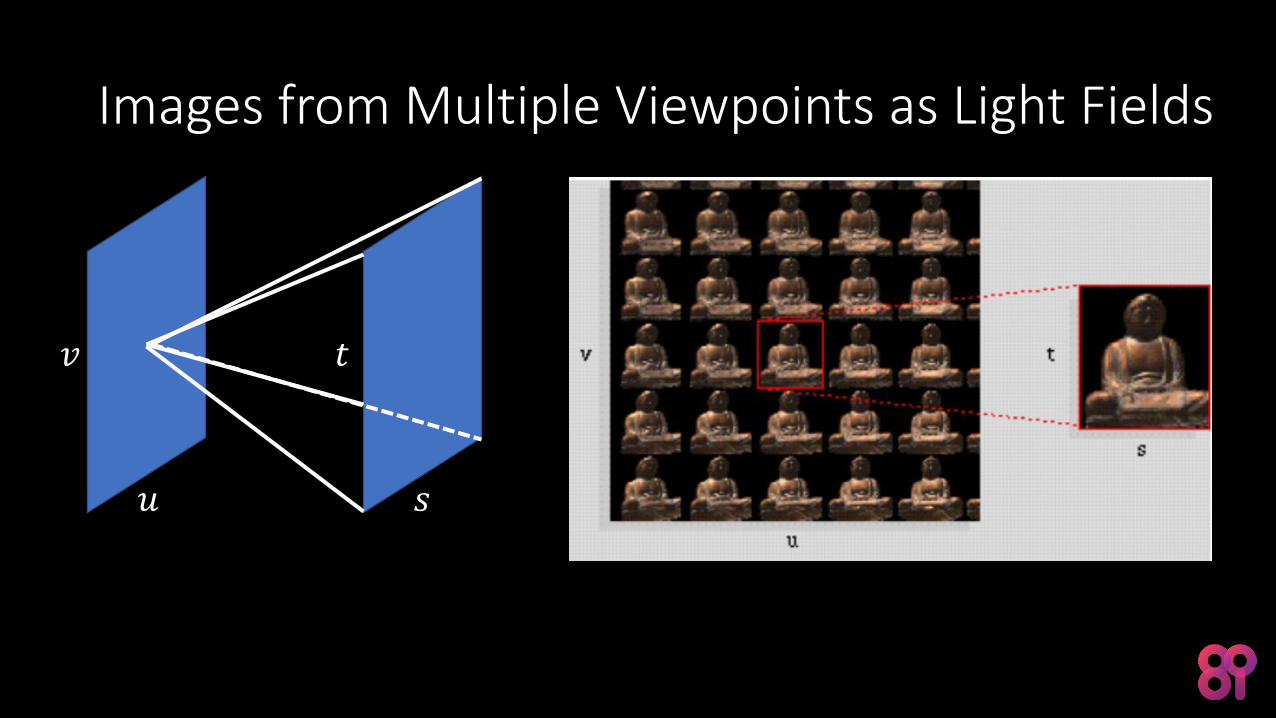
Images from Multiple Viewpoints as Light Fields
𝑣
𝑢 𝑠
𝑡
Agenda
• Introduction• Holograms == Volumetric Media (Gabor Holograms, Light Fields, Point Clouds, …)
• Applications
• Historical remarks
• Point Cloud Compression (PCC)
• Light Field Compression using PCC
• Streaming Holograms
• Conclusion
Applications
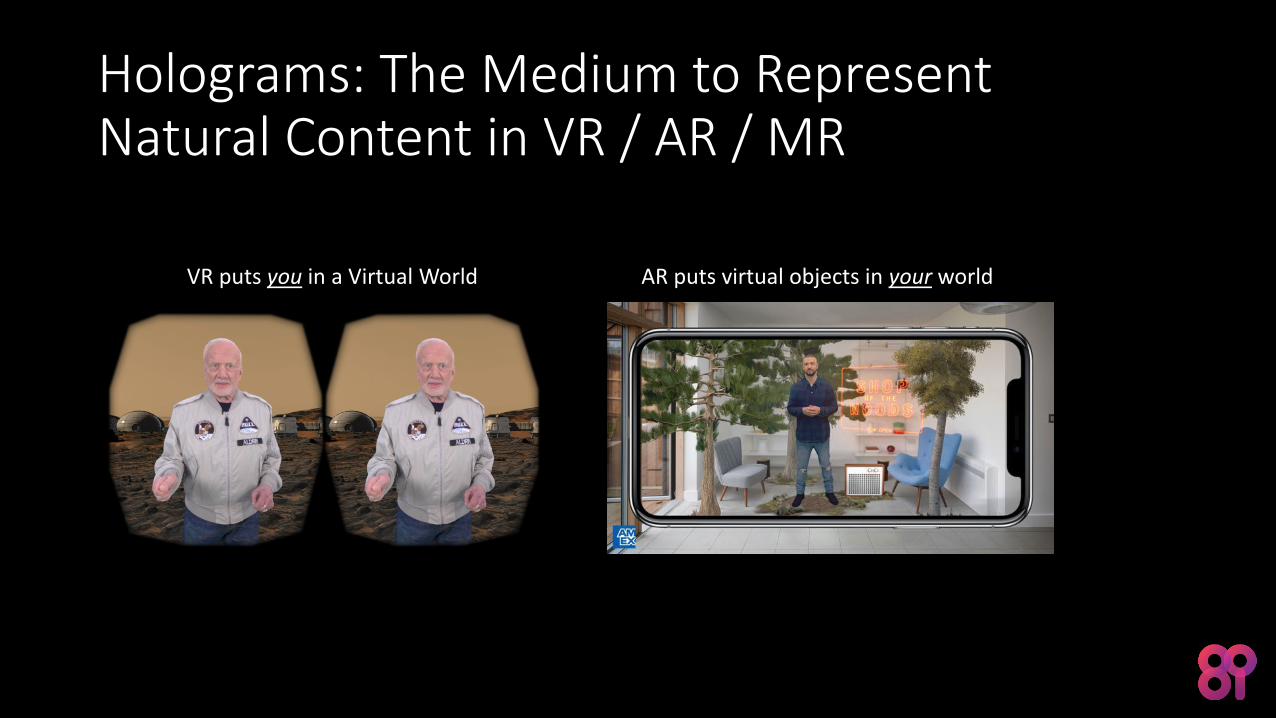
Holograms: The Medium to Represent Natural Content in VR / AR / MR
VR puts you in a Virtual World AR puts virtual objects in your world
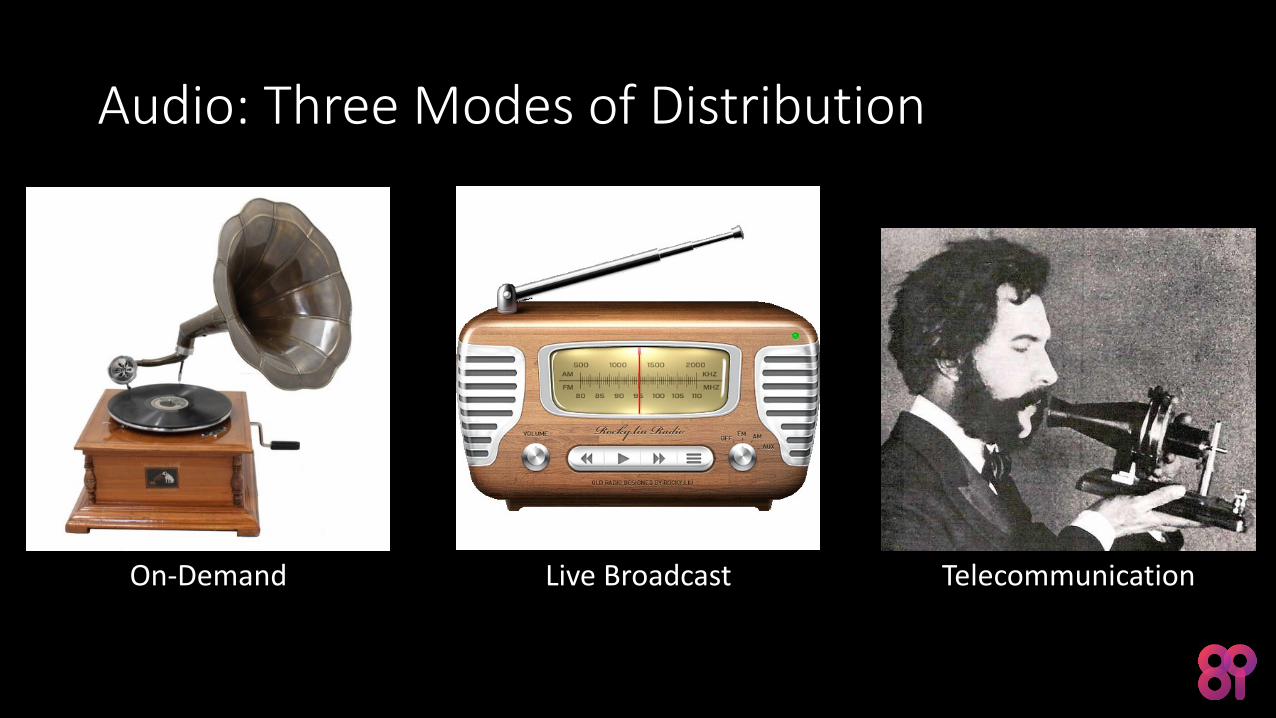
Audio: Three Modes of Distribution
On-Demand Live Broadcast Telecommunication
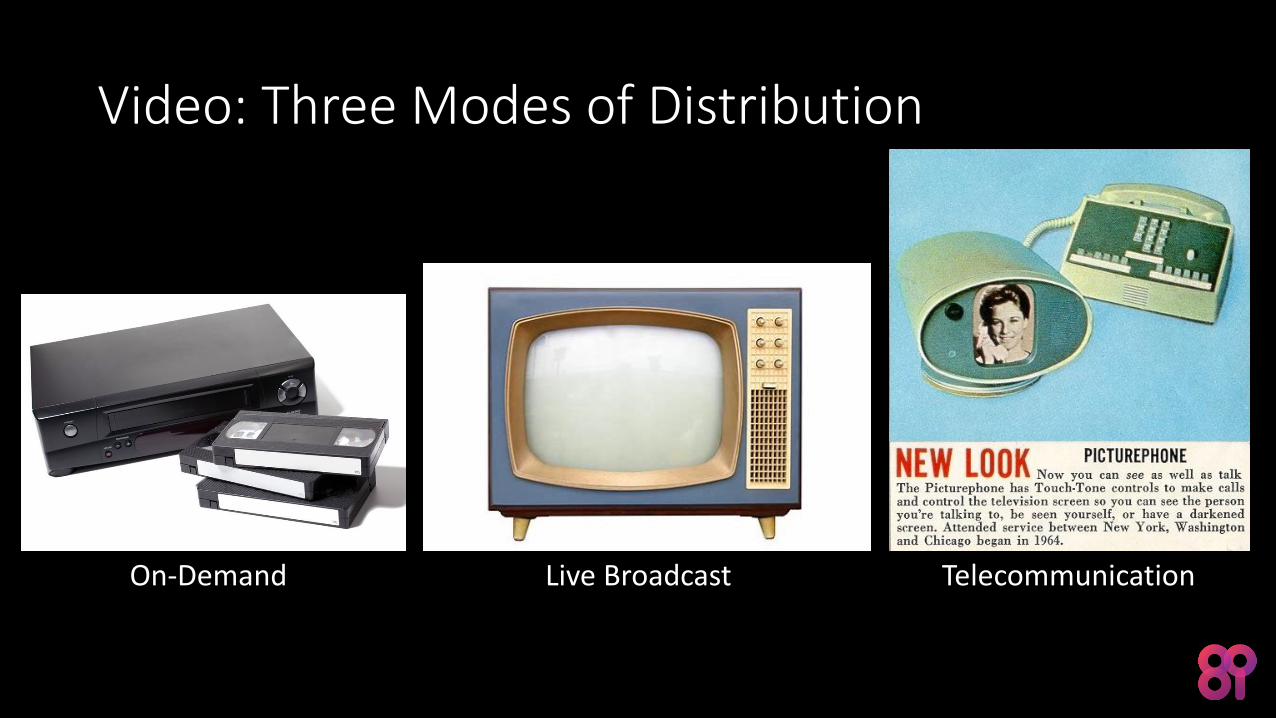
Video: Three Modes of Distribution
On-Demand Live Broadcast Telecommunication
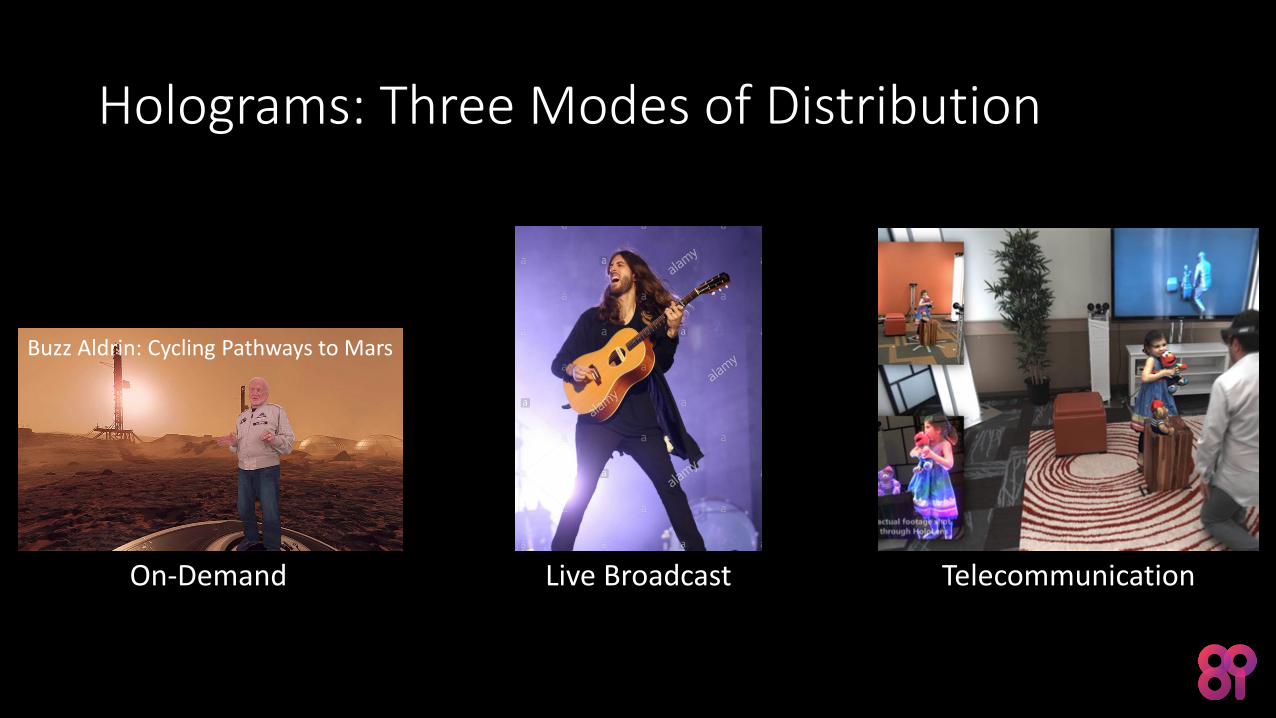
Holograms: Three Modes of Distribution
On-Demand Live Broadcast Telecommunication
Buzz Aldrin: Cycling Pathways to Mars
Historical Remarks
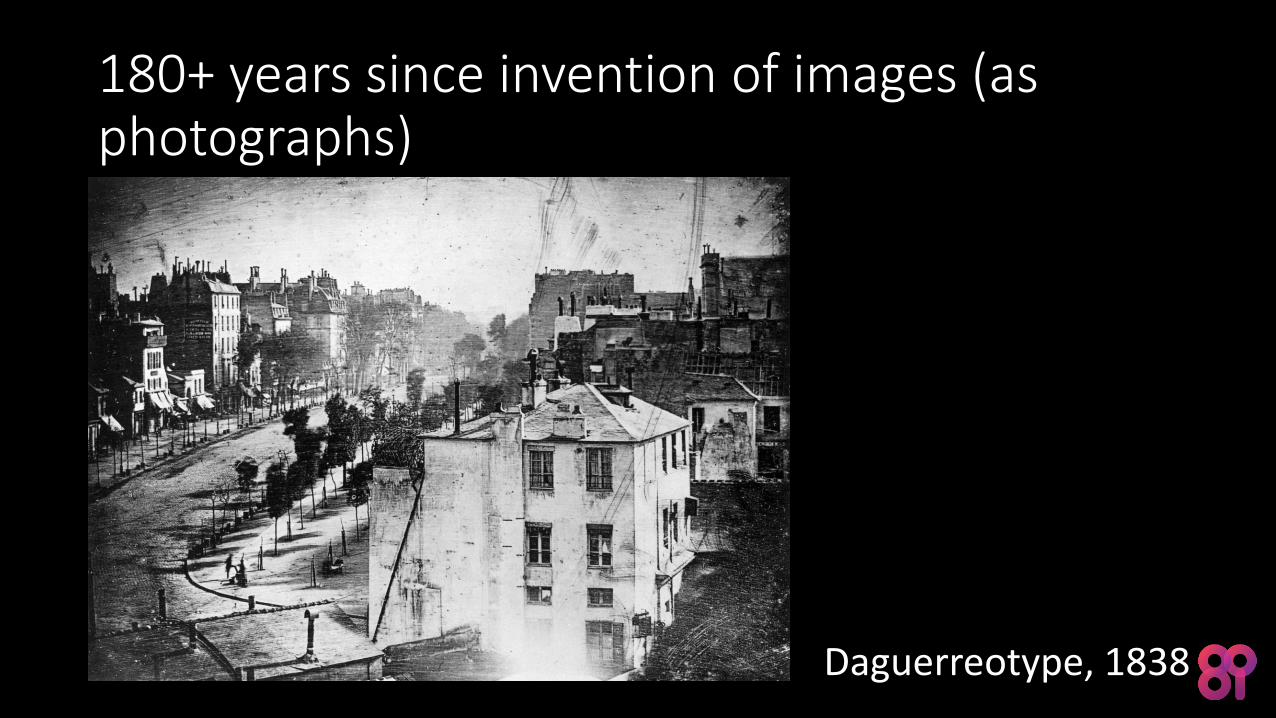
180+ years since invention of images (as photographs)
Daguerreotype, 1838
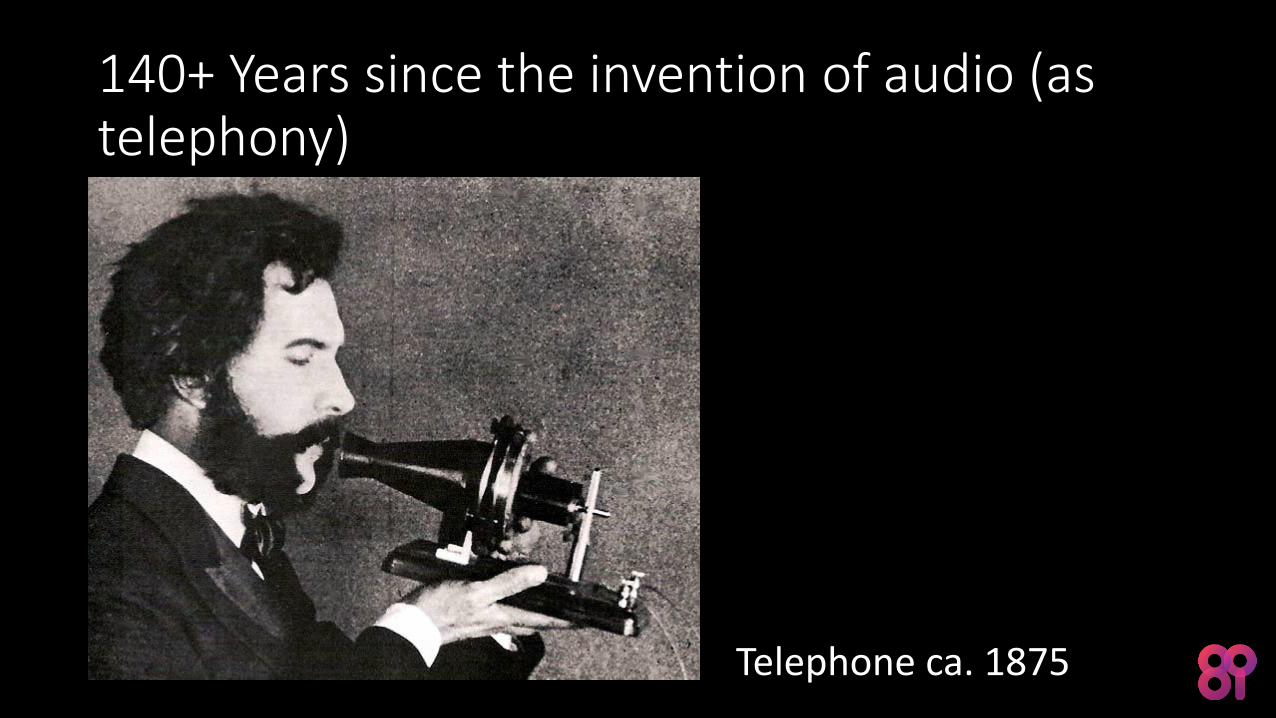
140+ Years since the invention of audio (as telephony)
Telephone ca. 1875
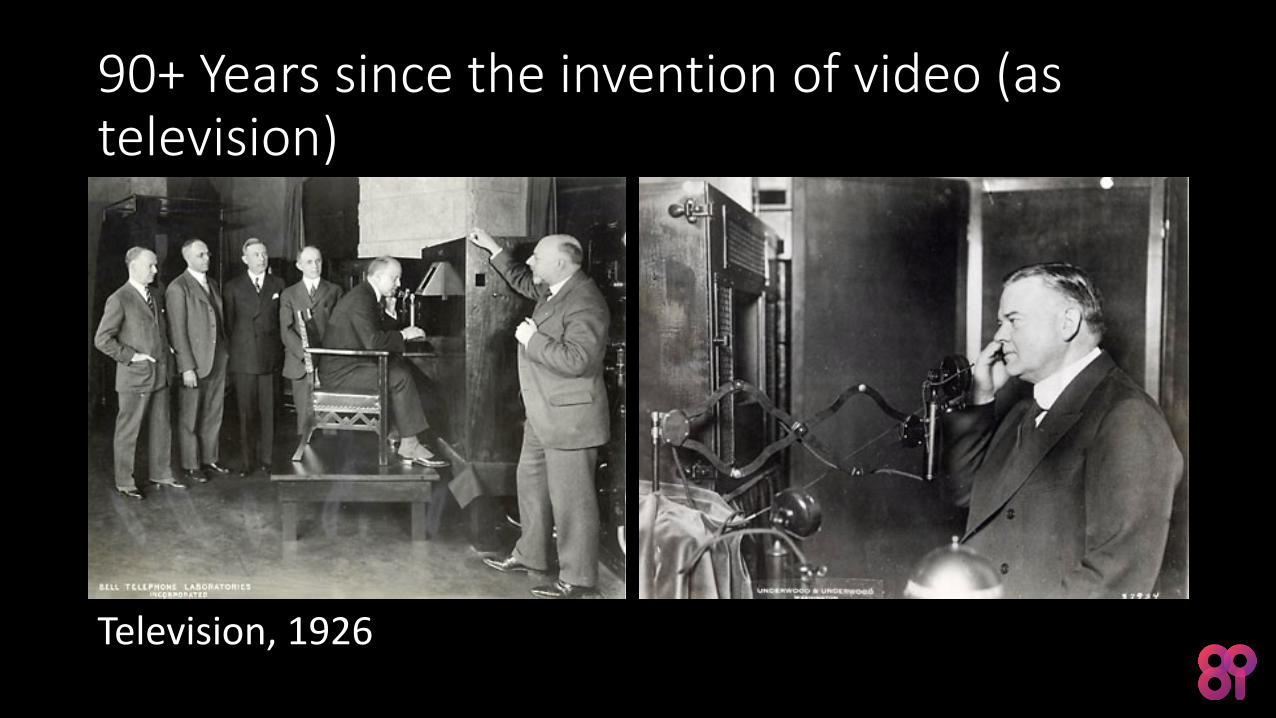
90+ Years since the invention of video (as television)
Television, 1926
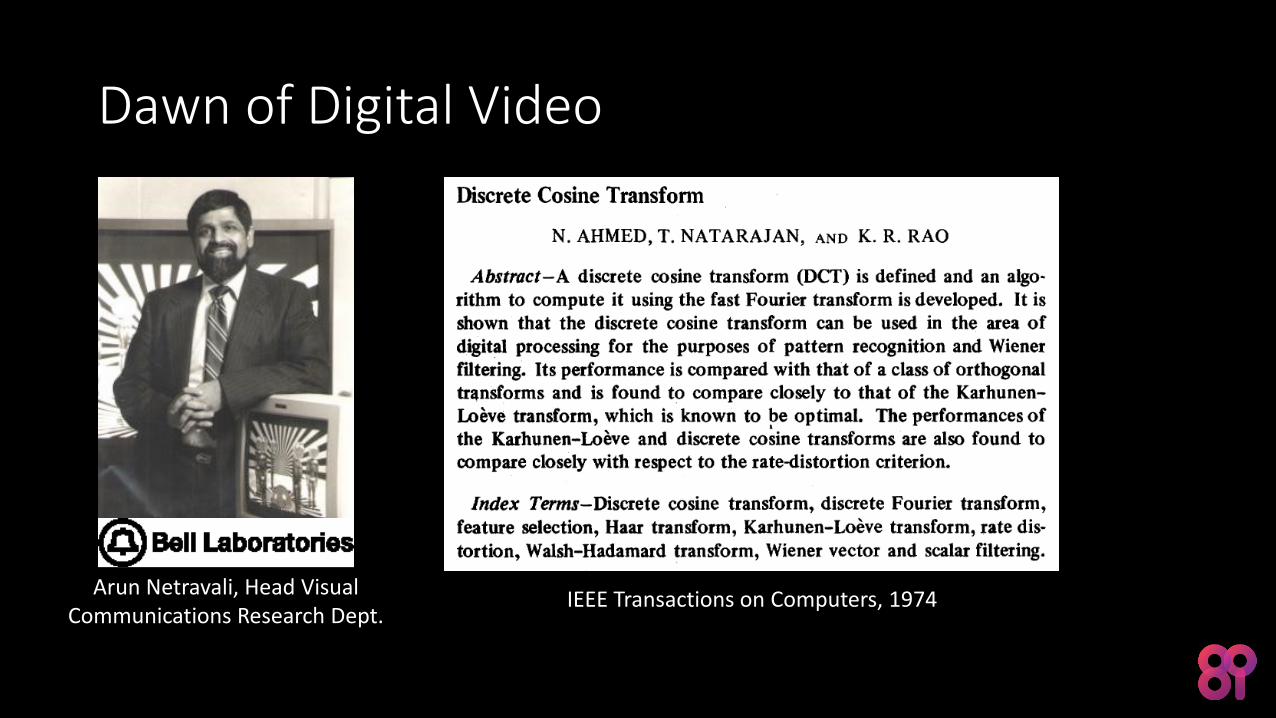
Dawn of Digital Video
Arun Netravali, Head Visual Communications Research Dept.
IEEE Transactions on Computers, 1974
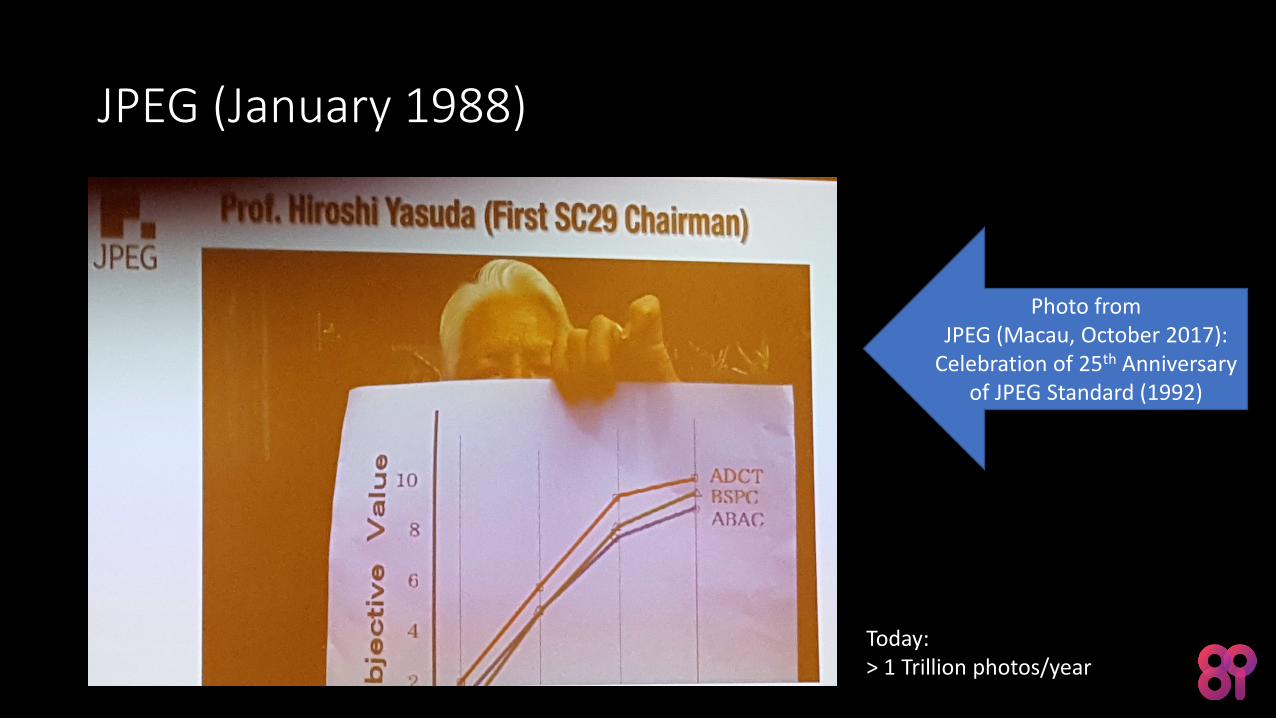
JPEG (January 1988)
Today:> 1 Trillion photos/year
Photo fromJPEG (Macau, October 2017):
Celebration of 25th Anniversary of JPEG Standard (1992)
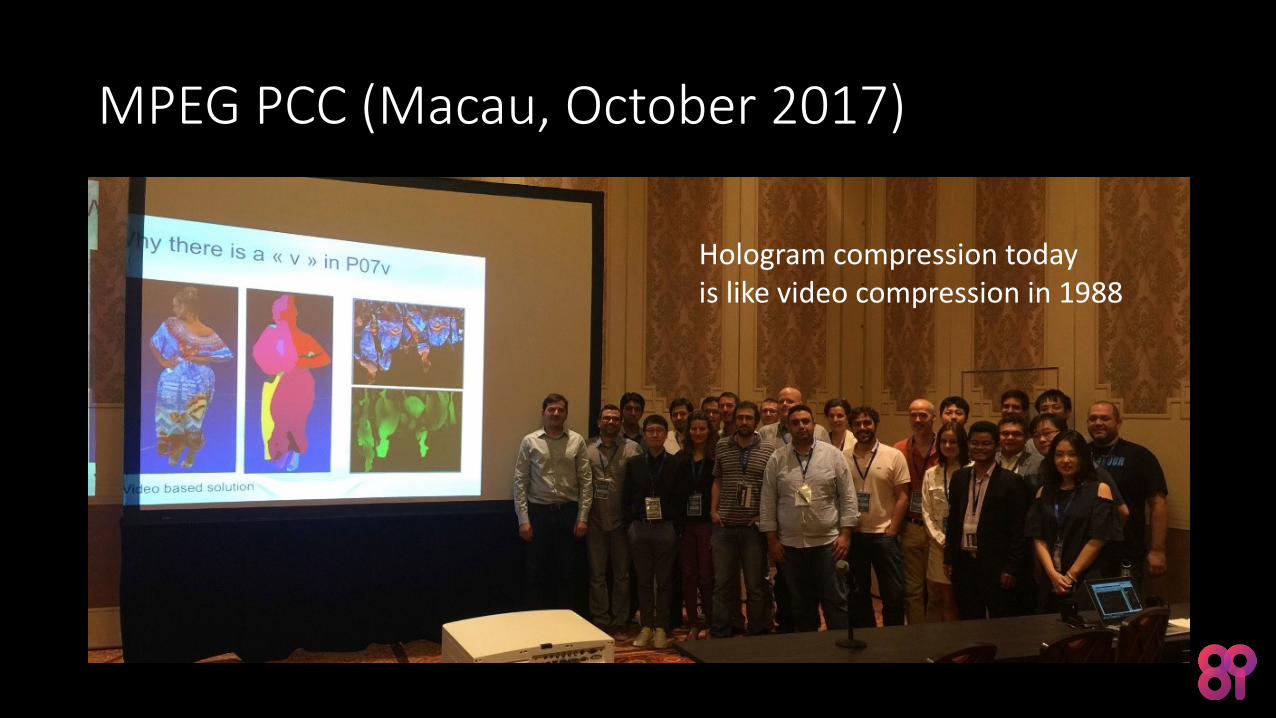
MPEG PCC (Macau, October 2017)
Hologram compression todayis like video compression in 1988
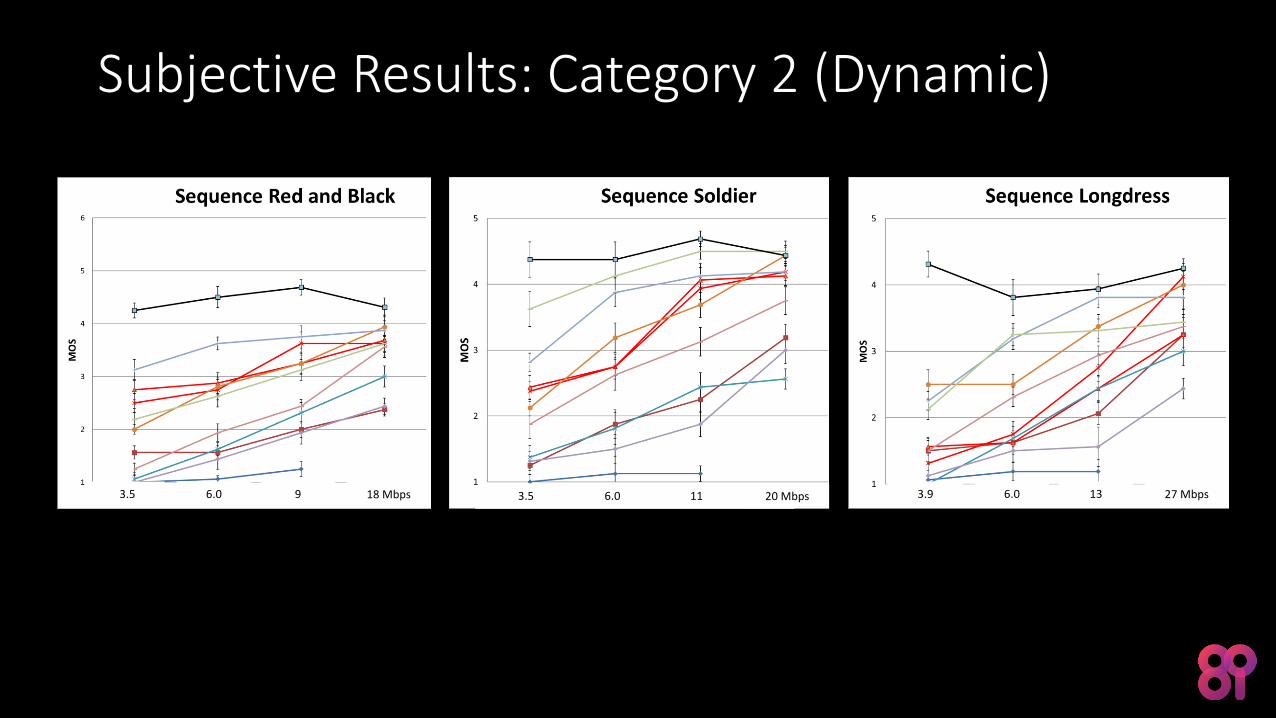
Subjective Results: Category 2 (Dynamic)
3.9 6.0 13 27 Mbps3.5 6.0 11 20 Mbps3.5 6.0 9 18 Mbps
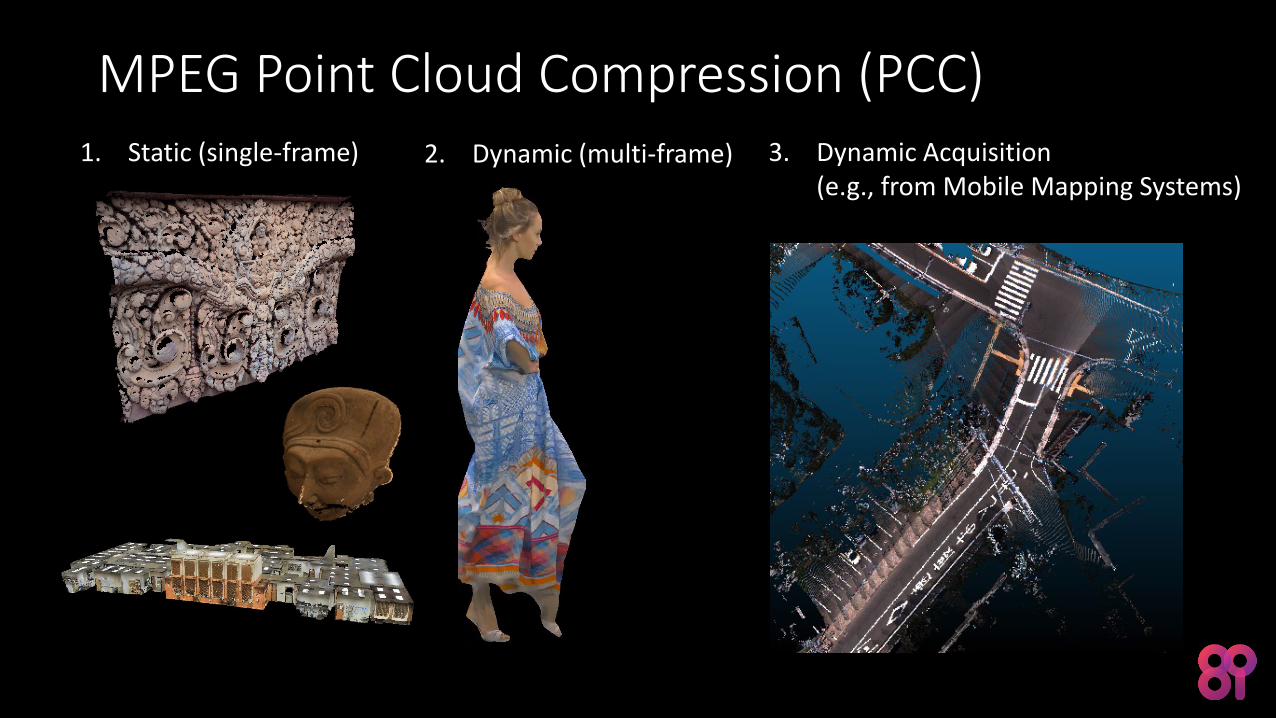
1. Static (single-frame) 3. Dynamic Acquisition(e.g., from Mobile Mapping Systems)
MPEG Point Cloud Compression (PCC)2. Dynamic (multi-frame)
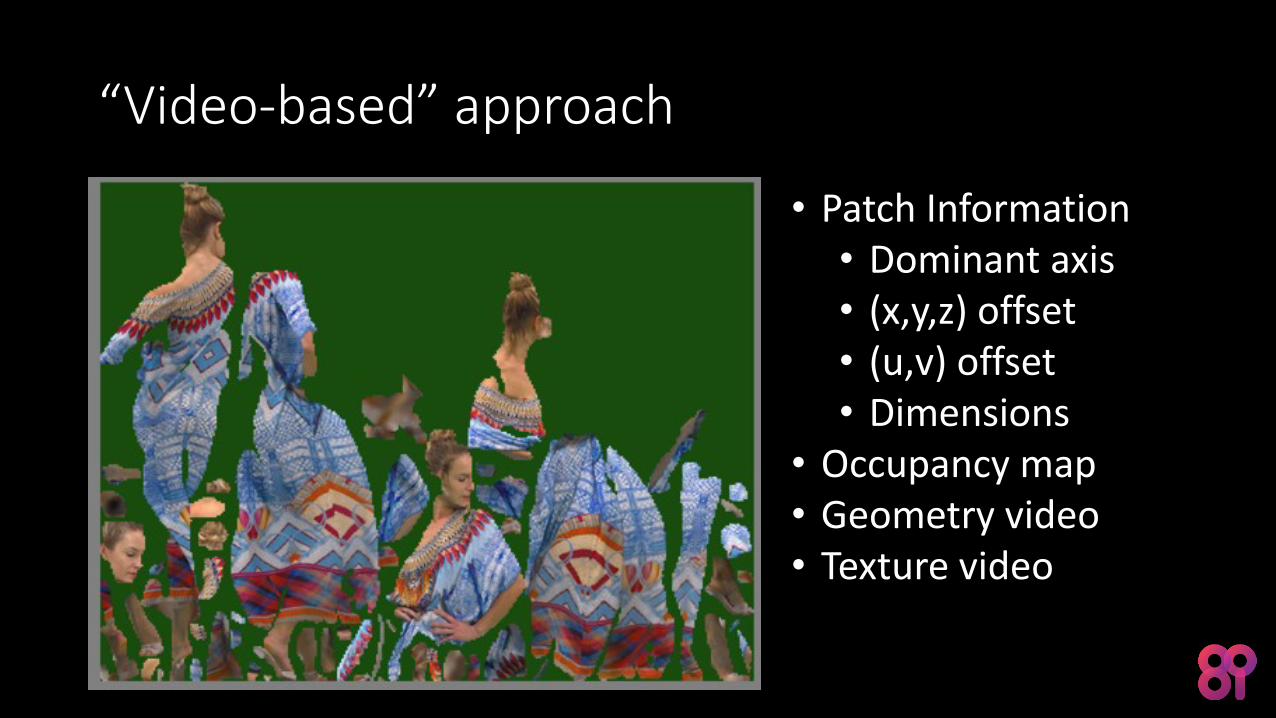
“Video-based” approach
• Patch Information• Dominant axis• (x,y,z) offset• (u,v) offset• Dimensions
• Occupancy map• Geometry video• Texture video
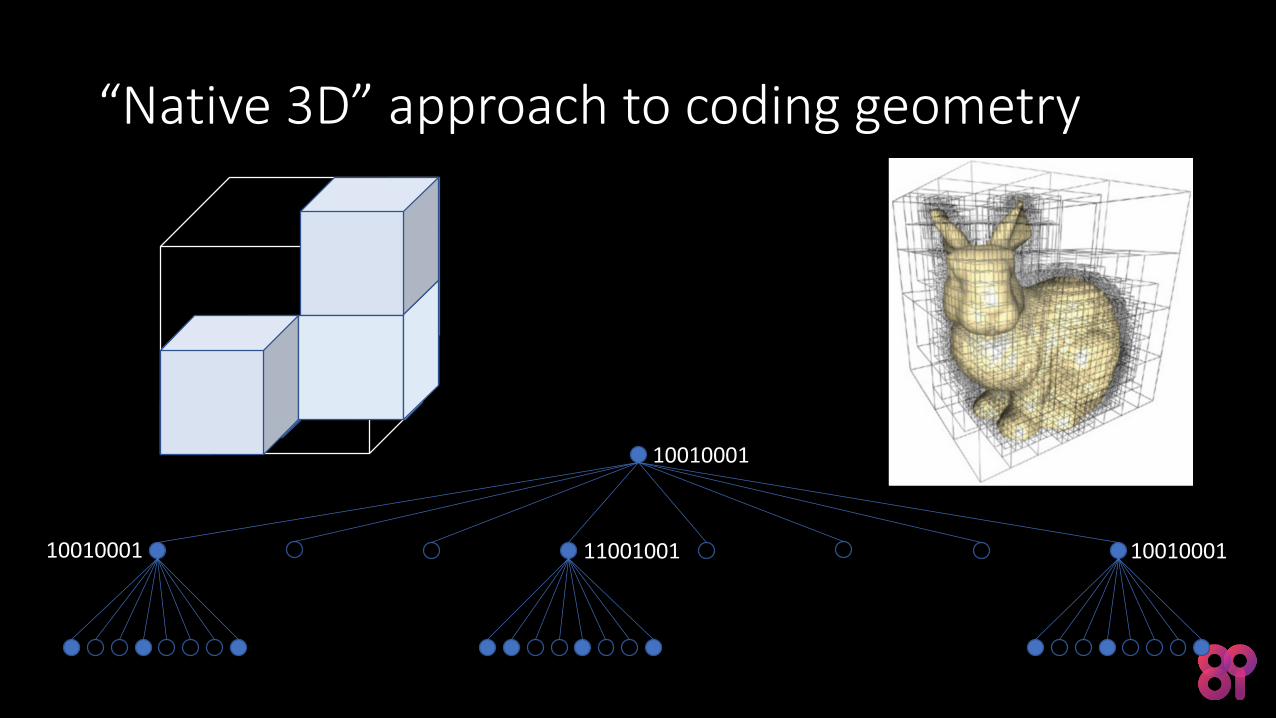
“Native 3D” approach to coding geometry
10010001
10010001 11001001 10010001
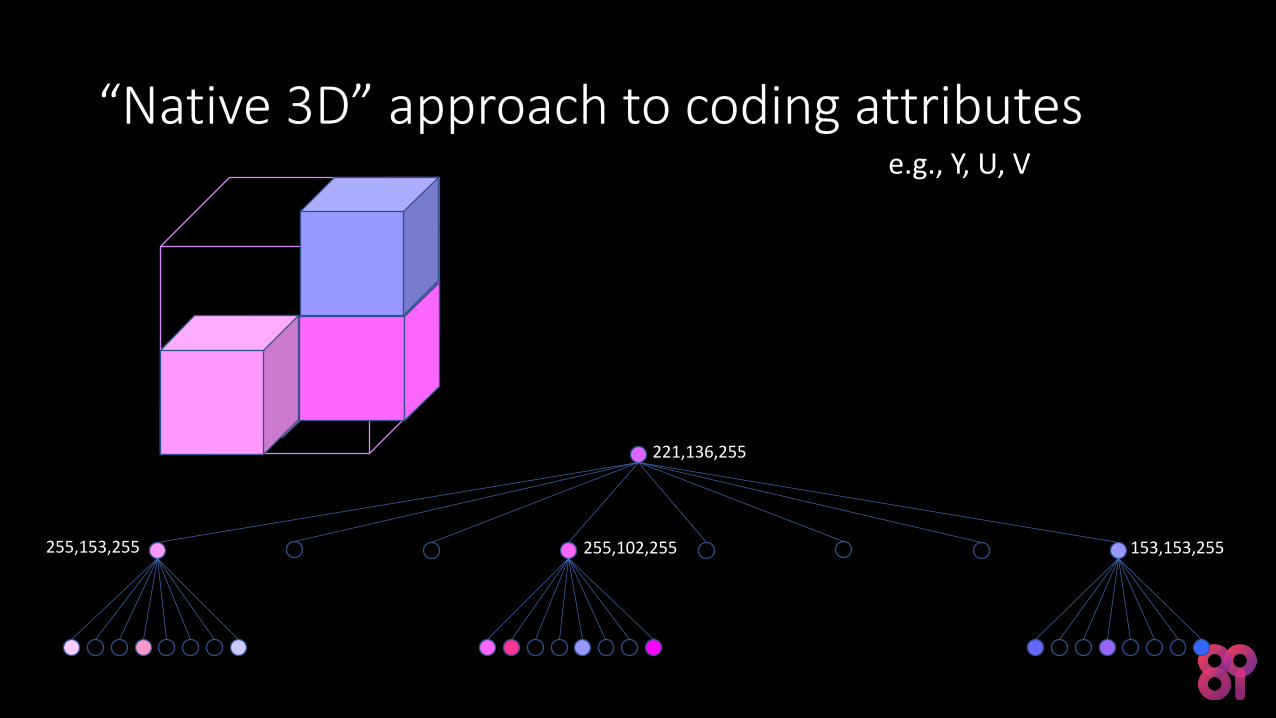
“Native 3D” approach to coding attributes
221,136,255
255,153,255 255,102,255 153,153,255
e.g., Y, U, V
Point Cloud Attribute Compression using a Region Adaptive Hierarchical Transform (RAHT)Ricardo L. de Queiroz and Philip A. Chou, “Compression of 3D Point Clouds Using a Region-Adaptive Hierarchical Transform,” IEEE Trans. Image Processing, Aug 2016.
Maja Krivokuca, Maxim Koroteev, Philip A. Chou, Robert Higgs, and Charles Loop, “A Volumetric Approach to Point Cloud Compression,” in preparation.
Three Generations of Transformsfor Point Cloud Attribute Compression1. Graph Signal Processing (Graph Fourier Transform – GFT)
2. Sampled Spatial Stochastic Process (Gaussian Process Transform – GPT)
3. Volumetric Functions (Region Adaptive Hierarchical Transform – RAHT)
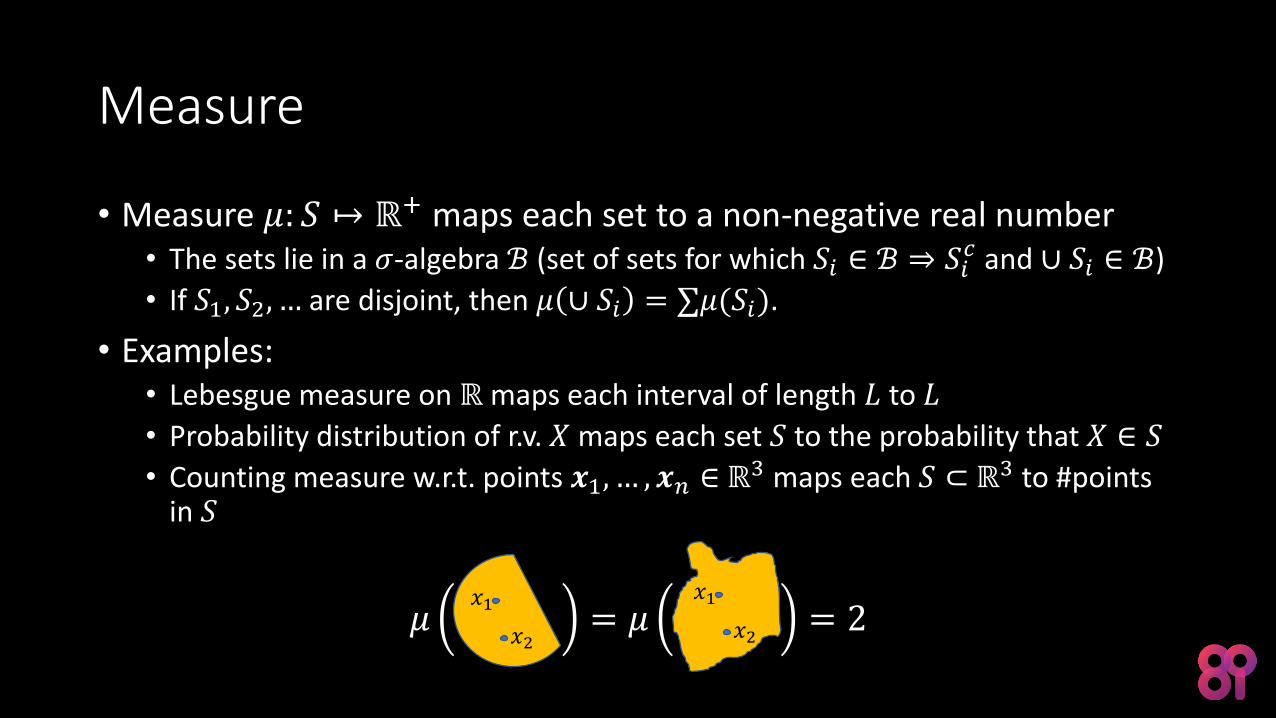
Measure
• Measure 𝜇: 𝑆 ↦ ℝ+ maps each set to a non-negative real number• The sets lie in a 𝜎-algebra ℬ (set of sets for which 𝑆𝑖 ∈ ℬ ⇒ 𝑆𝑖
𝑐 and ∪ 𝑆𝑖 ∈ ℬ)
• If 𝑆1, 𝑆2, … are disjoint, then 𝜇 ∪ 𝑆𝑖 = ∑𝜇(𝑆𝑖).
• Examples:• Lebesgue measure on ℝ maps each interval of length 𝐿 to 𝐿
• Probability distribution of r.v. 𝑋 maps each set 𝑆 to the probability that 𝑋 ∈ 𝑆
• Counting measure w.r.t. points 𝒙1, … , 𝒙𝑛 ∈ ℝ3 maps each 𝑆 ⊂ ℝ3 to #points
in 𝑆
𝜇 = 𝜇 = 2𝑥2
𝑥1𝑥2
𝑥1
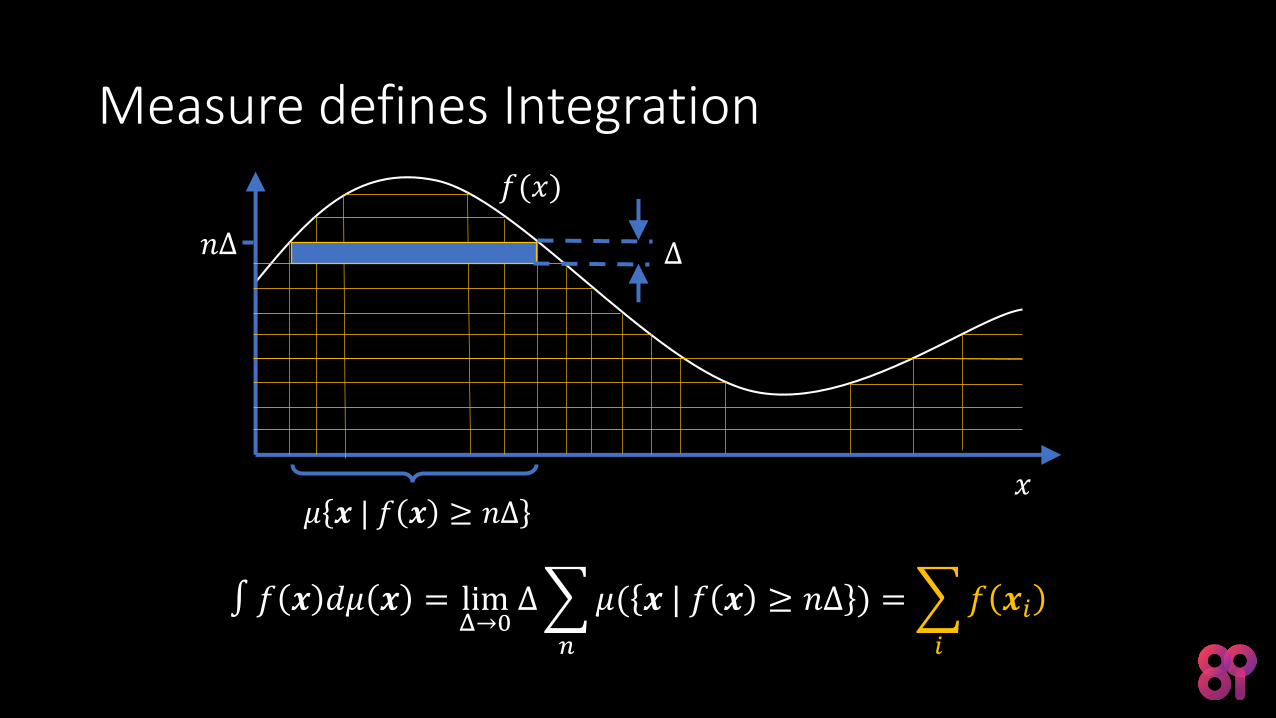
Measure defines Integration
∫ 𝑓 𝒙 𝑑𝜇 𝒙 = limΔ→0
Δ
𝑛
𝜇( 𝒙 | 𝑓 𝒙 ≥ 𝑛Δ ) =
𝑖
𝑓 𝒙𝑖
𝑛Δ
𝜇 𝒙 | 𝑓 𝒙 ≥ 𝑛Δ
𝑓(𝑥)
𝑥
Δ
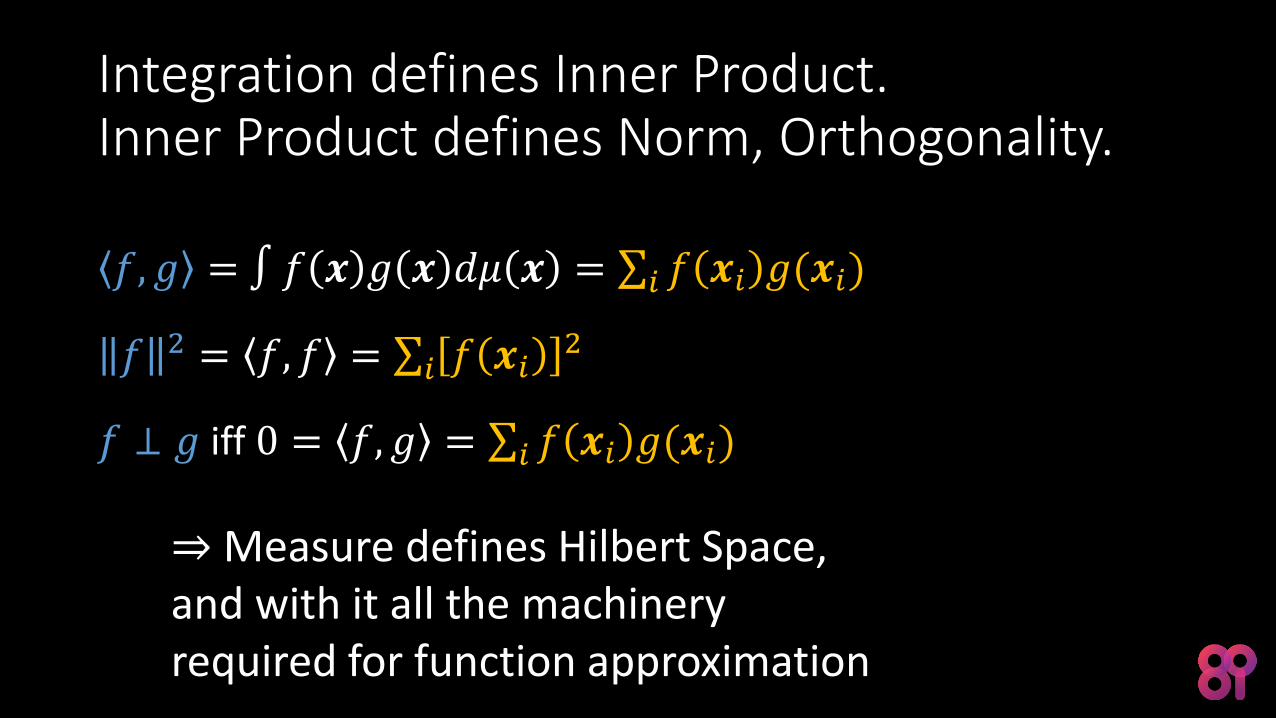
Integration defines Inner Product.Inner Product defines Norm, Orthogonality.
𝑓, 𝑔 = ∫ 𝑓 𝒙 𝑔 𝒙 𝑑𝜇 𝒙 = ∑𝑖 𝑓 𝒙𝑖 𝑔(𝒙𝑖)
𝑓 2 = 𝑓, 𝑓 = ∑𝑖 𝑓 𝒙𝑖2
𝑓 ⊥ 𝑔 iff 0 = 𝑓, 𝑔 = ∑𝑖 𝑓 𝒙𝑖 𝑔(𝒙𝑖)
⇒ Measure defines Hilbert Space, and with it all the machinery required for function approximation
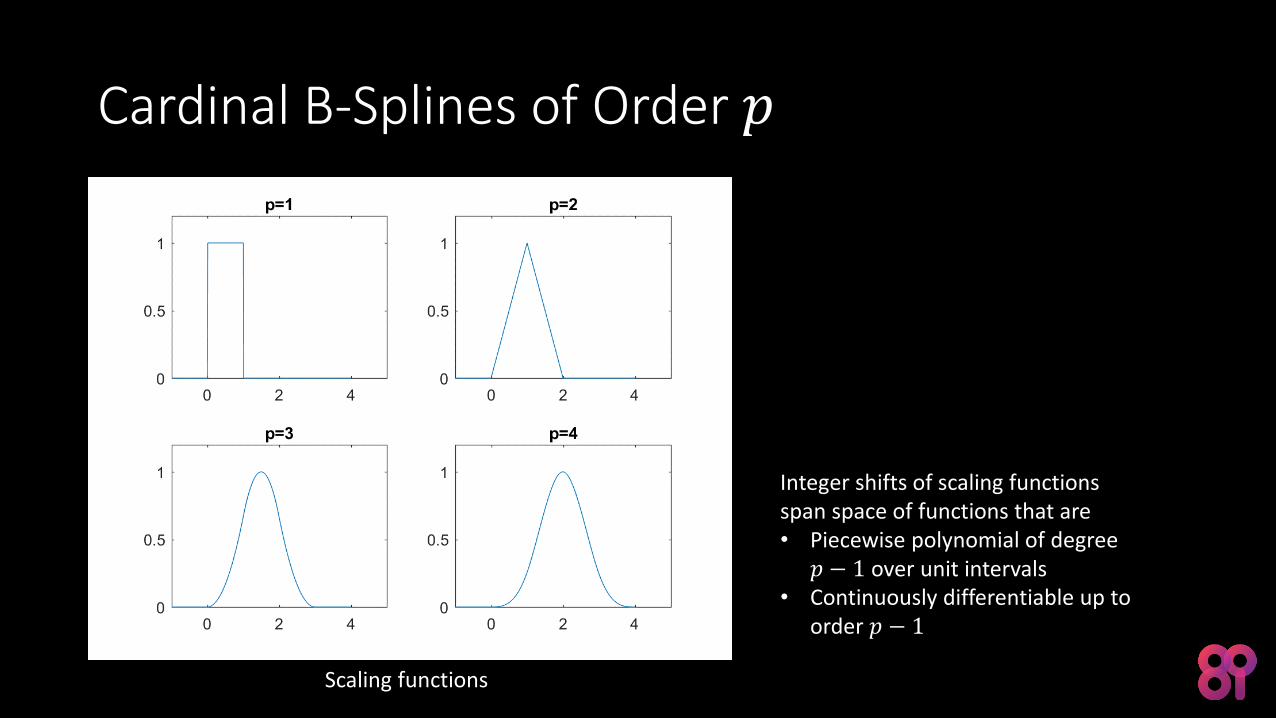
Cardinal B-Splines of Order 𝑝
Scaling functions
Integer shifts of scaling functions span space of functions that are• Piecewise polynomial of degree
𝑝 − 1 over unit intervals• Continuously differentiable up to
order 𝑝 − 1
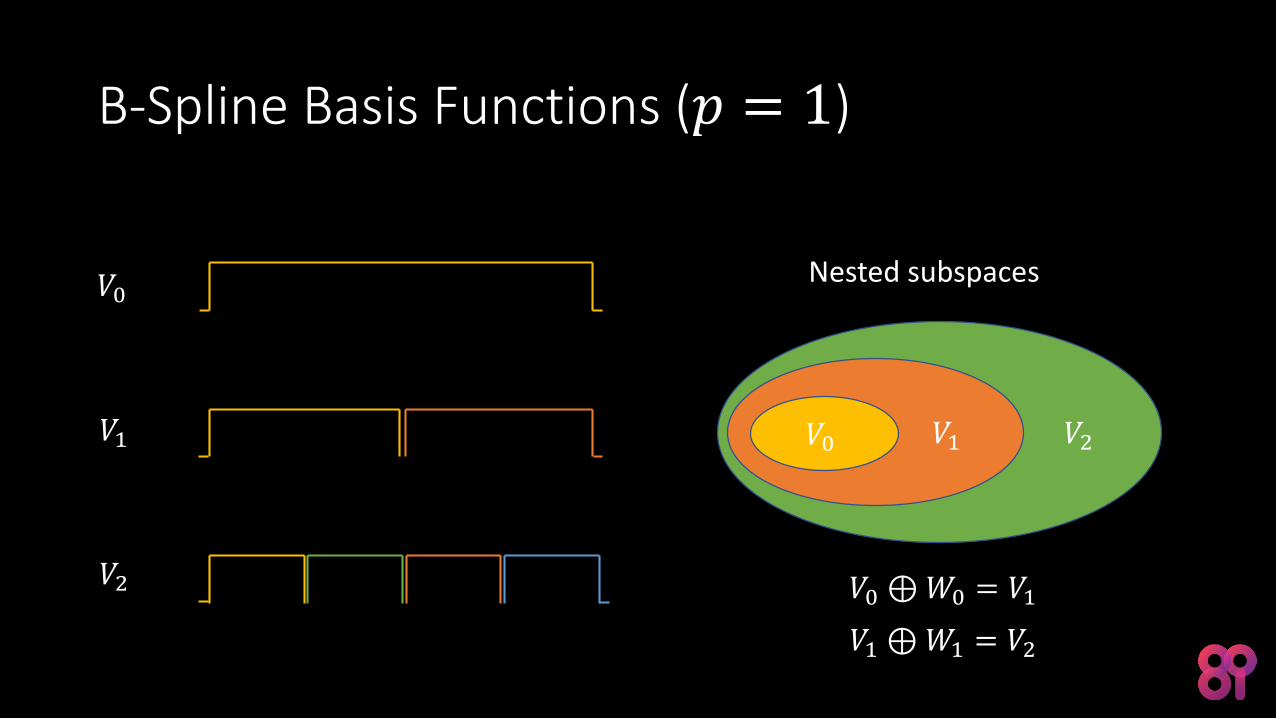
B-Spline Basis Functions (𝑝 = 1)
𝑉0
𝑉1
𝑉2
𝑉2𝑉1𝑉0
𝑉0 ⊕𝑊0 = 𝑉1
𝑉1 ⊕𝑊1 = 𝑉2
Nested subspaces
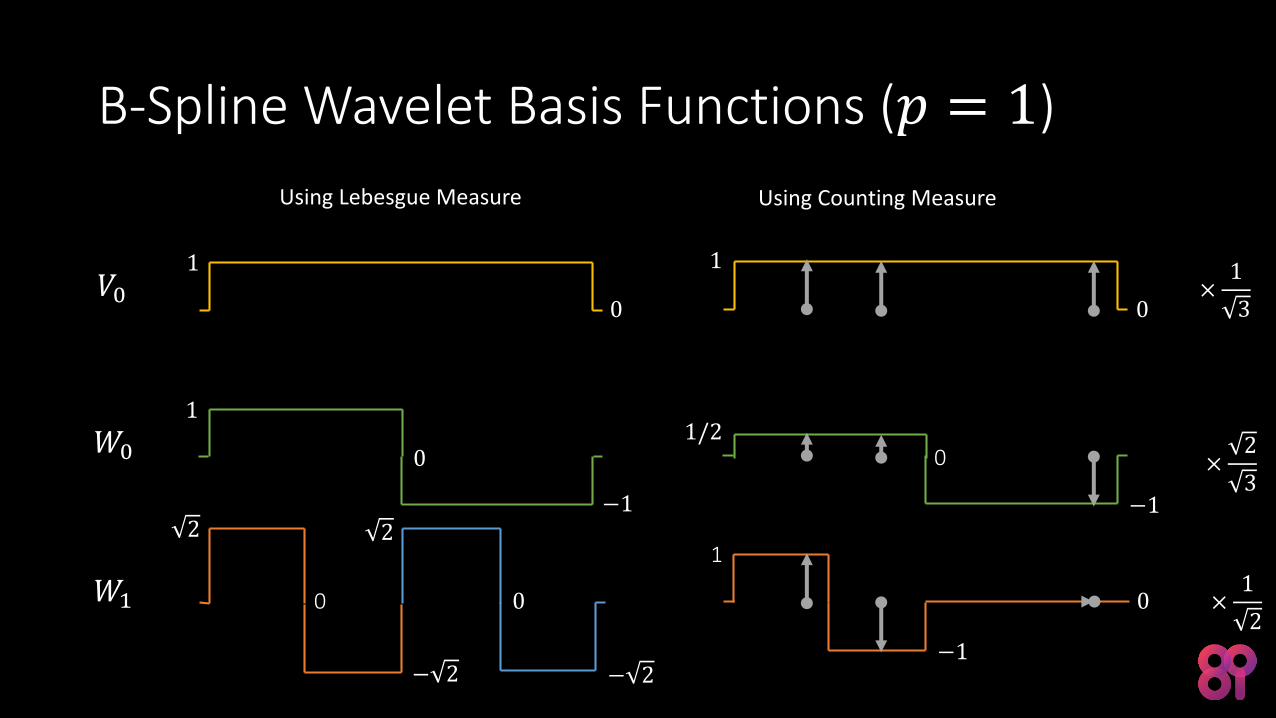
B-Spline Wavelet Basis Functions (𝑝 = 1)
Using Lebesgue Measure Using Counting Measure
𝑉0
𝑊0
𝑊1
1
1
2
1
1/2
1
−1
− 2
0 0
−1
0
−1
0 0
0
− 2
0
2
×1
3
×2
3
×1
2
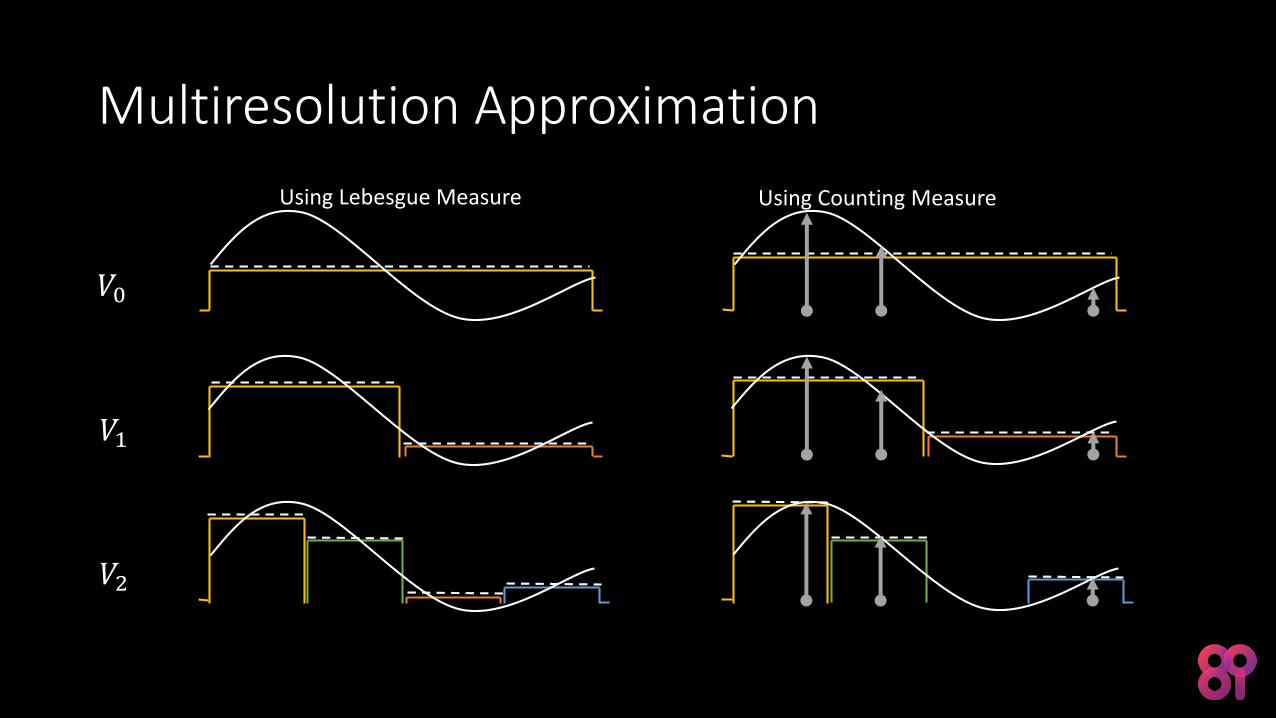
Multiresolution Approximation
𝑉0
𝑉1
𝑉2
Using Lebesgue Measure Using Counting Measure

B-Spline Approximation (𝑝 = 1)
Level 7(15604 coeffs)
Level 6(3821 coeffs)
Level 5(917 coeffs)
Level 8(62073 coeffs)
Level 9(237965 coeffs)

B-Spline Approximation (𝑝 = 2)
Level 7(30455 coeffs)
Level 6(7213 coeffs)
Level 5(1699 coeffs)
Level 8(125244 coeffs)
Level 9(497199 coeffs)
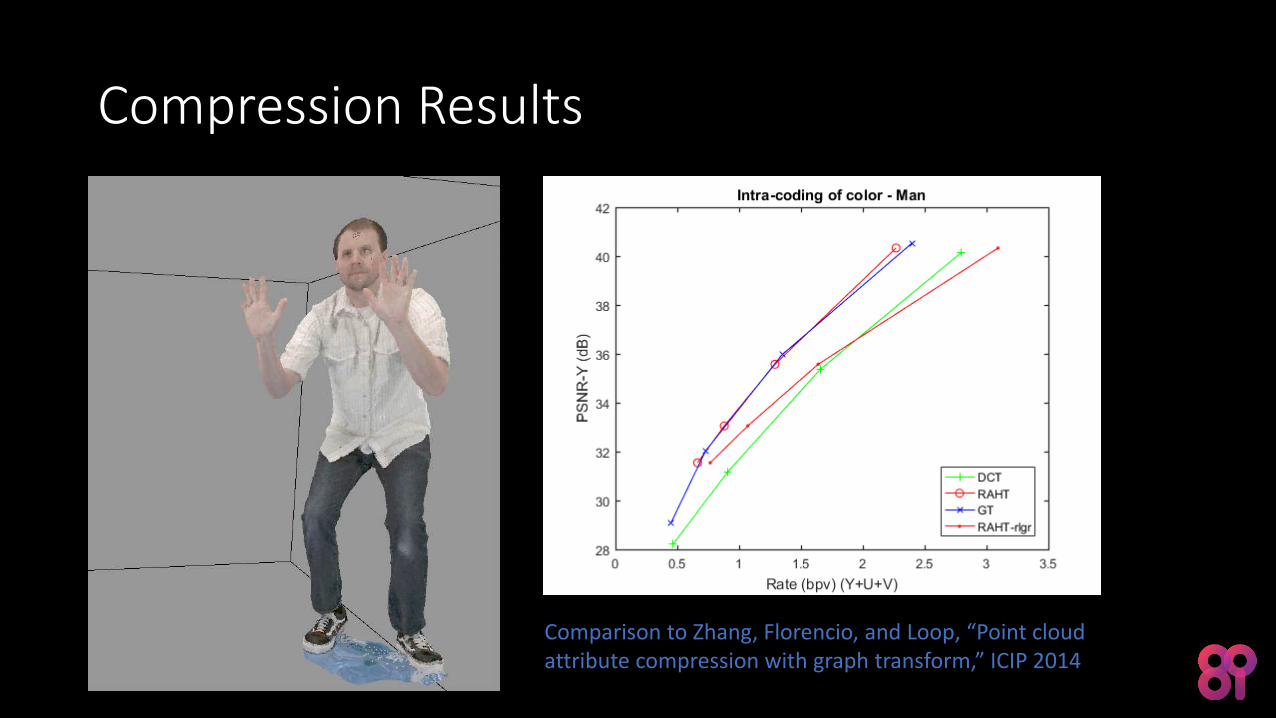
Compression Results
Comparison to Zhang, Florencio, and Loop, “Point cloud attribute compression with graph transform,” ICIP 2014
Surface Light Field Compression using a Point Cloud CodecXiang Zhang, Philip A. Chou, Ming-Ting Sun, Maolong Yang, et al., “Surface Light Field Compression using a Point Cloud Codec,” submitted to IEEE JETCAS special issue on immersive video, and to appear at ICIP 2018.
“Light Field” == Plenoptic Function
• 7D: 𝑓 𝑥, 𝑦, 𝑧, 𝜃, 𝜙, 𝜆, 𝑡
• 5D: 𝑓(𝑥, 𝑦, 𝑧, 𝜃, 𝜙)
• 4D: 𝑓(𝑥, 𝑦, 𝜃, 𝜙)
E. H. Adelson and J. R. Bergen, “The plenoptic function and the elements of early vision,” in Computational Models of Visual Processing, 1991.
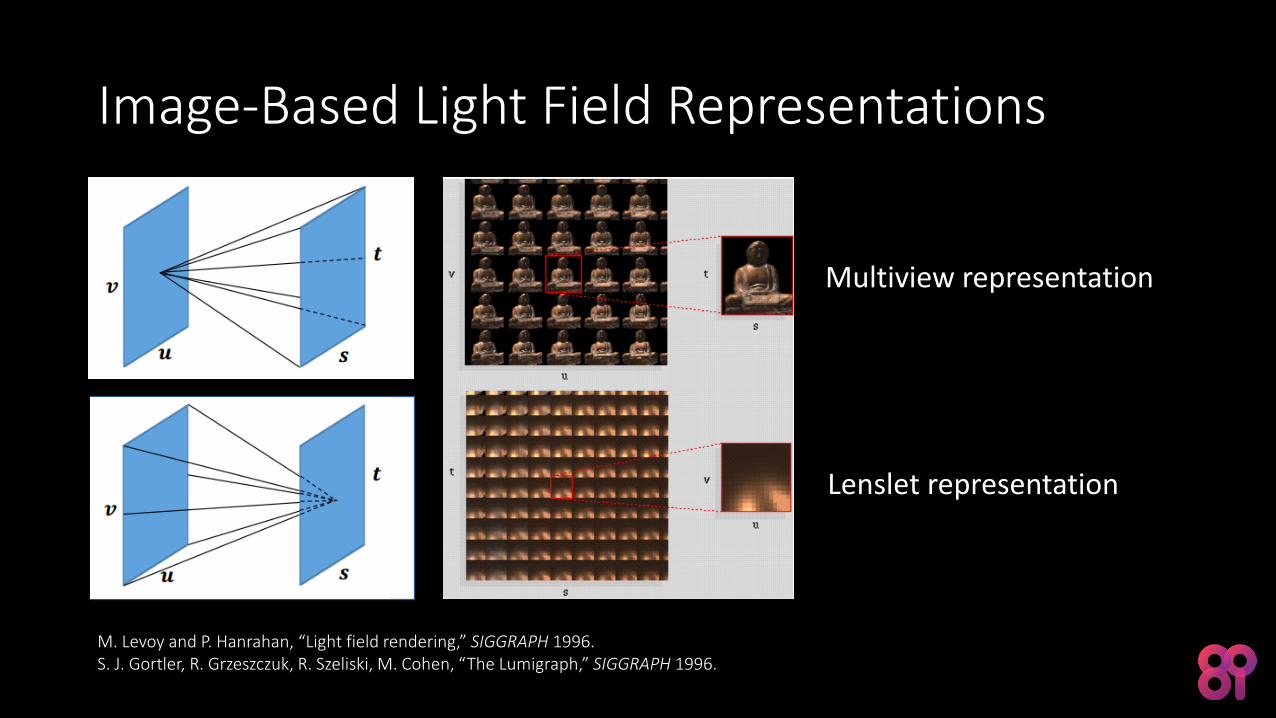
Image-Based Light Field Representations
M. Levoy and P. Hanrahan, “Light field rendering,” SIGGRAPH 1996.S. J. Gortler, R. Grzeszczuk, R. Szeliski, M. Cohen, “The Lumigraph,” SIGGRAPH 1996.
Multiview representation
Lenslet representation
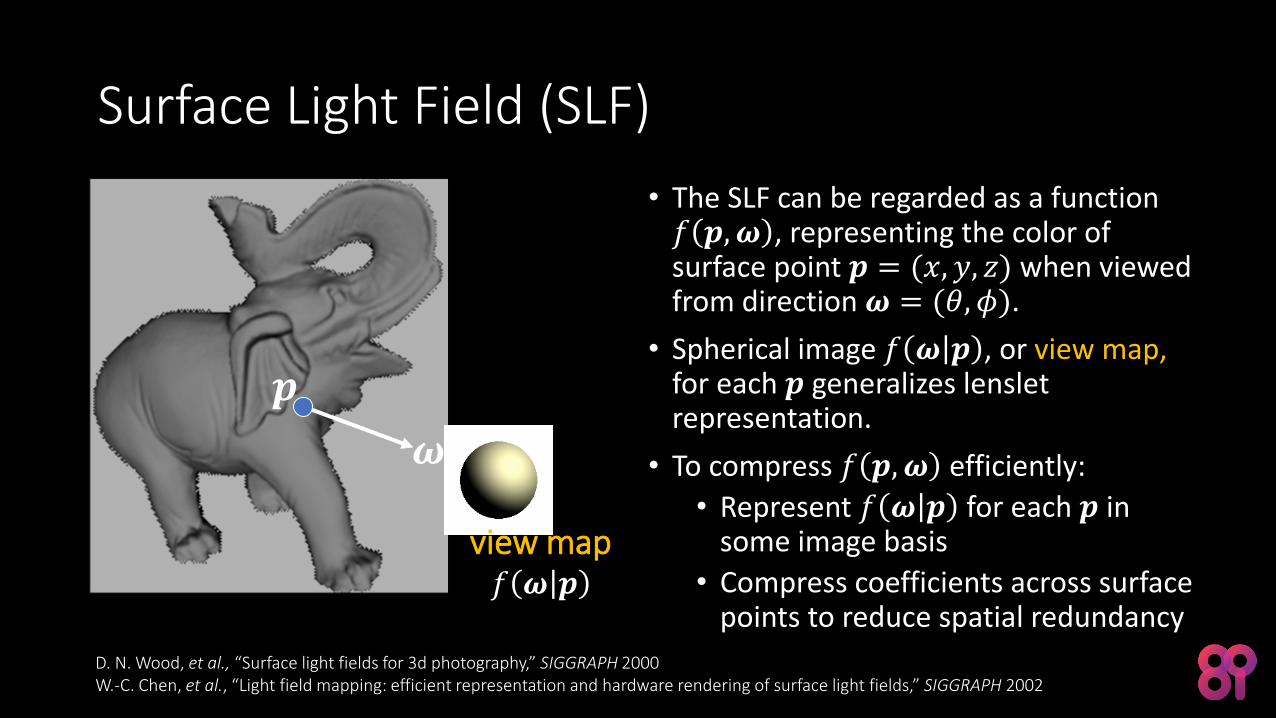
Surface Light Field (SLF)
• The SLF can be regarded as a function 𝑓 𝒑,𝝎 , representing the color of surface point 𝒑 = (𝑥, 𝑦, 𝑧) when viewed from direction 𝝎 = (𝜃, 𝜙).
• Spherical image 𝑓 𝝎 𝒑 , or view map, for each 𝒑 generalizes lenslet representation.
• To compress 𝑓 𝒑,𝝎 efficiently:
• Represent 𝑓 𝝎 𝒑 for each 𝒑 in some image basis
• Compress coefficients across surface points to reduce spatial redundancy
D. N. Wood, et al., “Surface light fields for 3d photography,” SIGGRAPH 2000W.-C. Chen, et al., “Light field mapping: efficient representation and hardware rendering of surface light fields,” SIGGRAPH 2002
𝒑
𝝎
view map𝑓 𝝎 𝒑
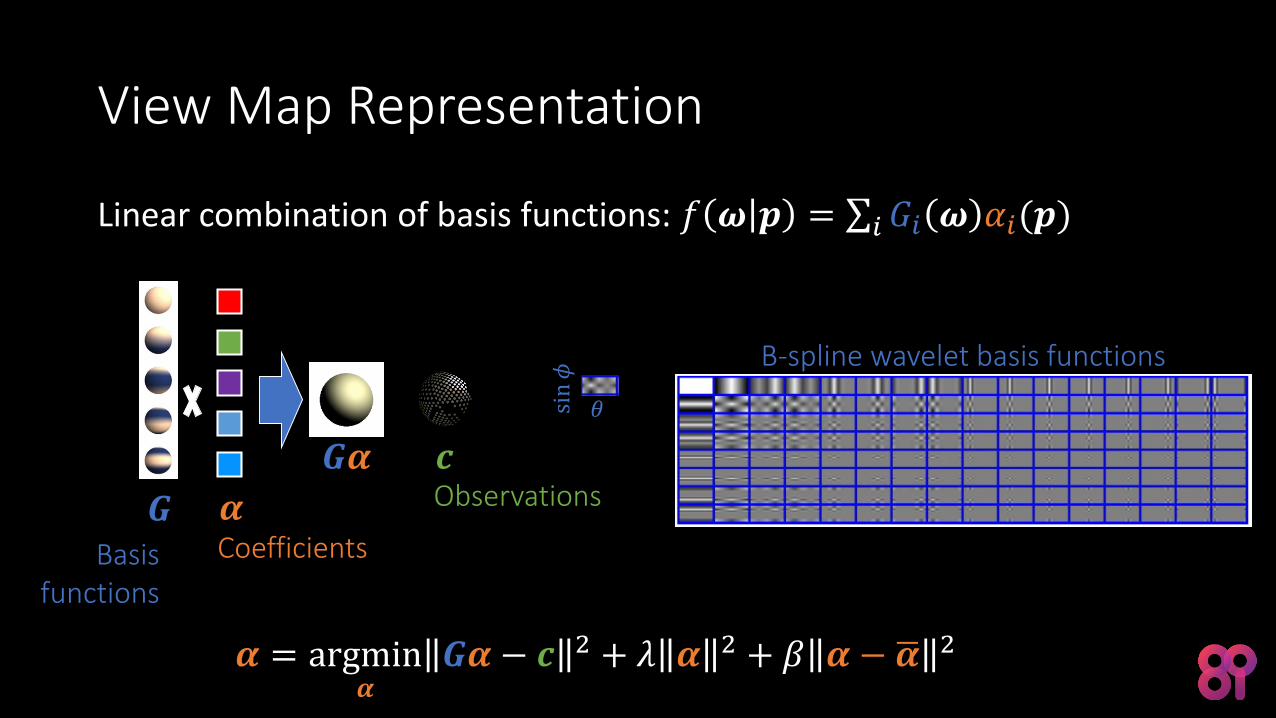
View Map Representation
Linear combination of basis functions: 𝑓 𝝎 𝒑 = ∑𝑖 𝐺𝑖 𝝎 𝛼𝑖(𝒑)
Basisfunctions
𝒄𝑮𝜶
𝑮 𝜶Coefficients
Observations
B-spline wavelet basis functions
𝜶 = argmin𝜶
𝑮𝜶 − 𝒄 2 + 𝜆 𝜶 2 + 𝛽 𝜶 − ഥ𝜶 2
𝜃sin𝜙
Compress Coefficients of Representation
• Spatially, using a Point Cloud Codec
• Coefficients are attributes of the points
• In this work, we used• Octree+RAHT PCC (MPEG PCC TMC1)
• Video-based PCC (MPEG PCC TMC2)• All the SLF coefs. are scaled to the range of [0,255] for 8-bit video codec
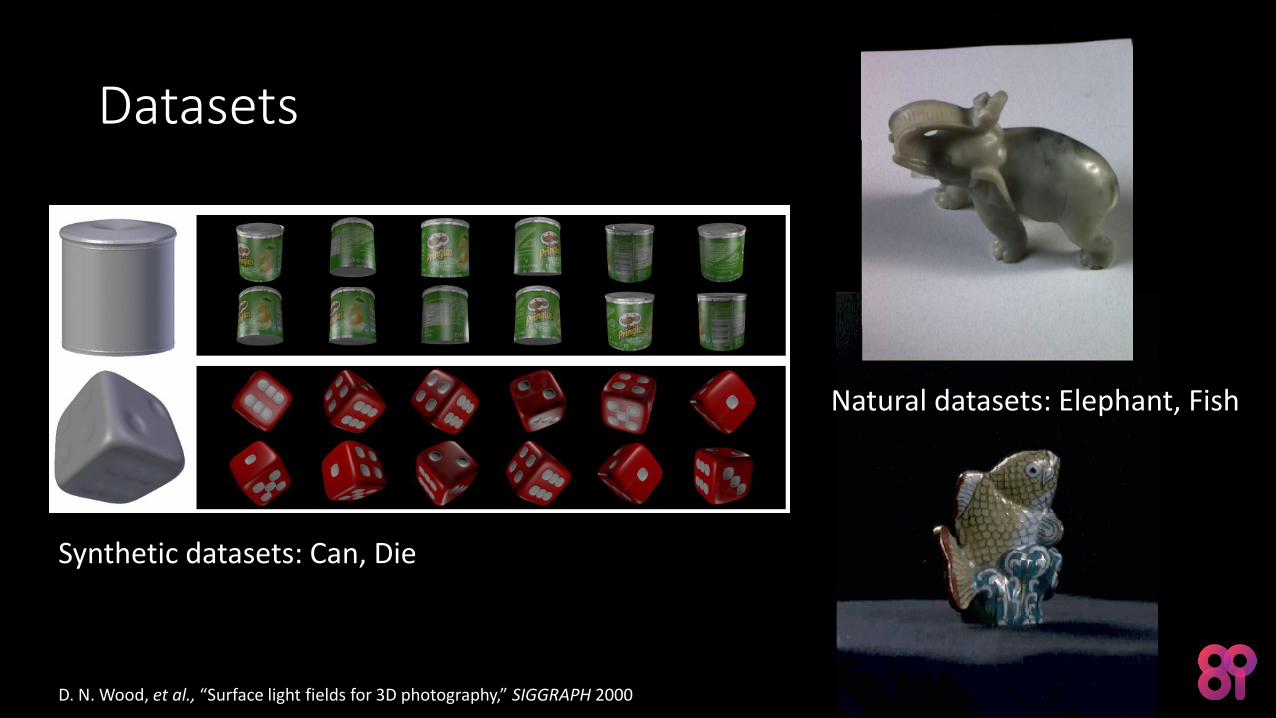
Datasets
Synthetic datasets: Can, Die
Natural datasets: Elephant, Fish
D. N. Wood, et al., “Surface light fields for 3D photography,” SIGGRAPH 2000
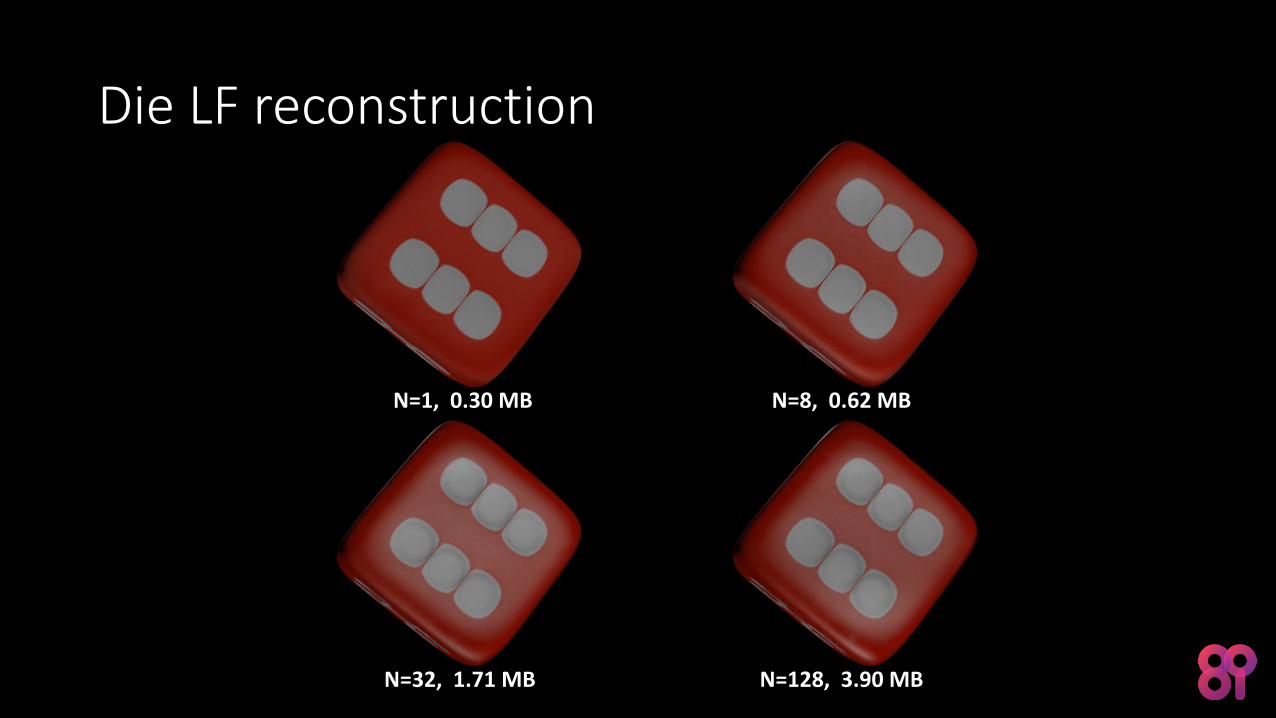
Die LF reconstruction
N=1, 0.30 MB N=8, 0.62 MB
N=32, 1.71 MB N=128, 3.90 MB
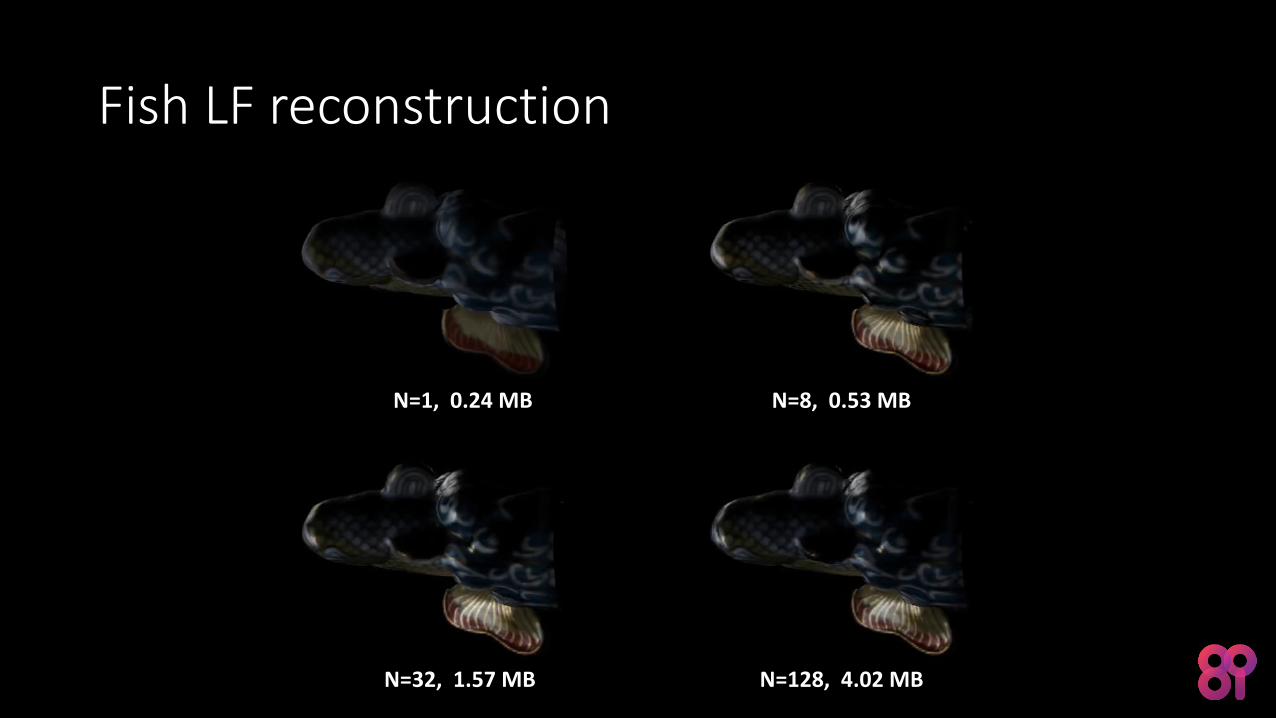
Fish LF reconstruction
N=1, 0.24 MB N=8, 0.53 MB
N=32, 1.57 MB N=128, 4.02 MB
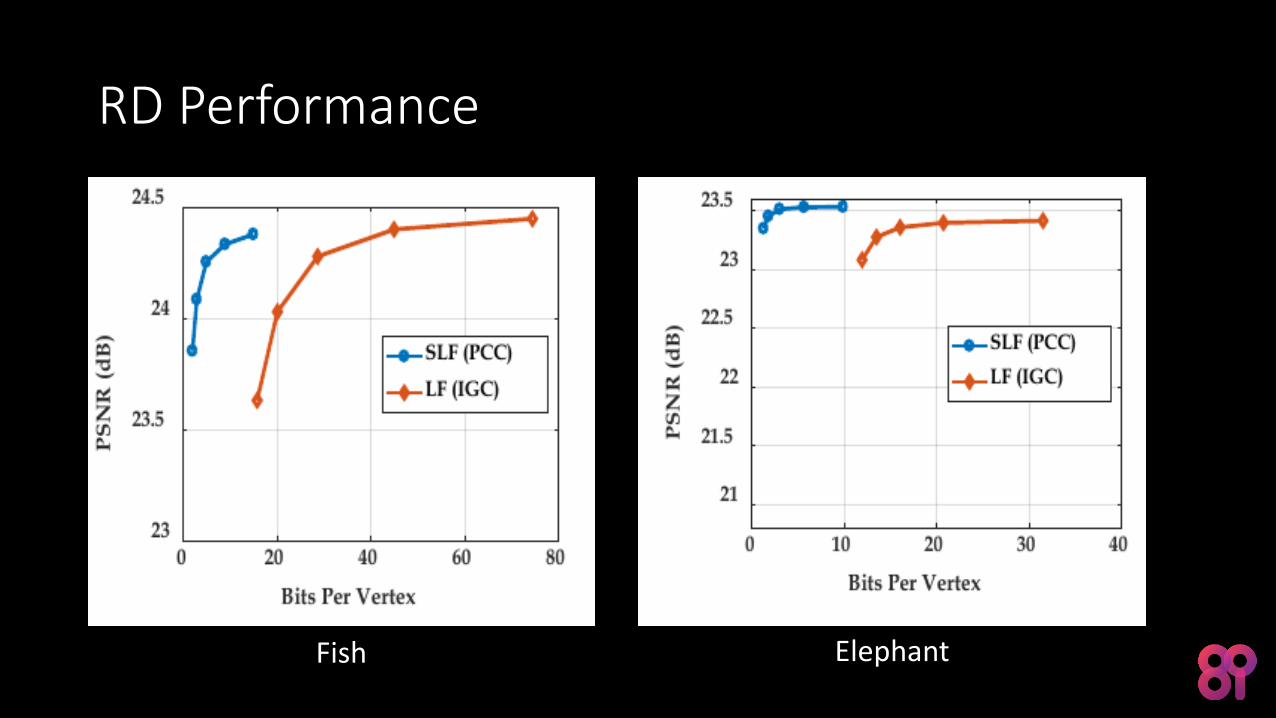
RD Performance
Fish Elephant
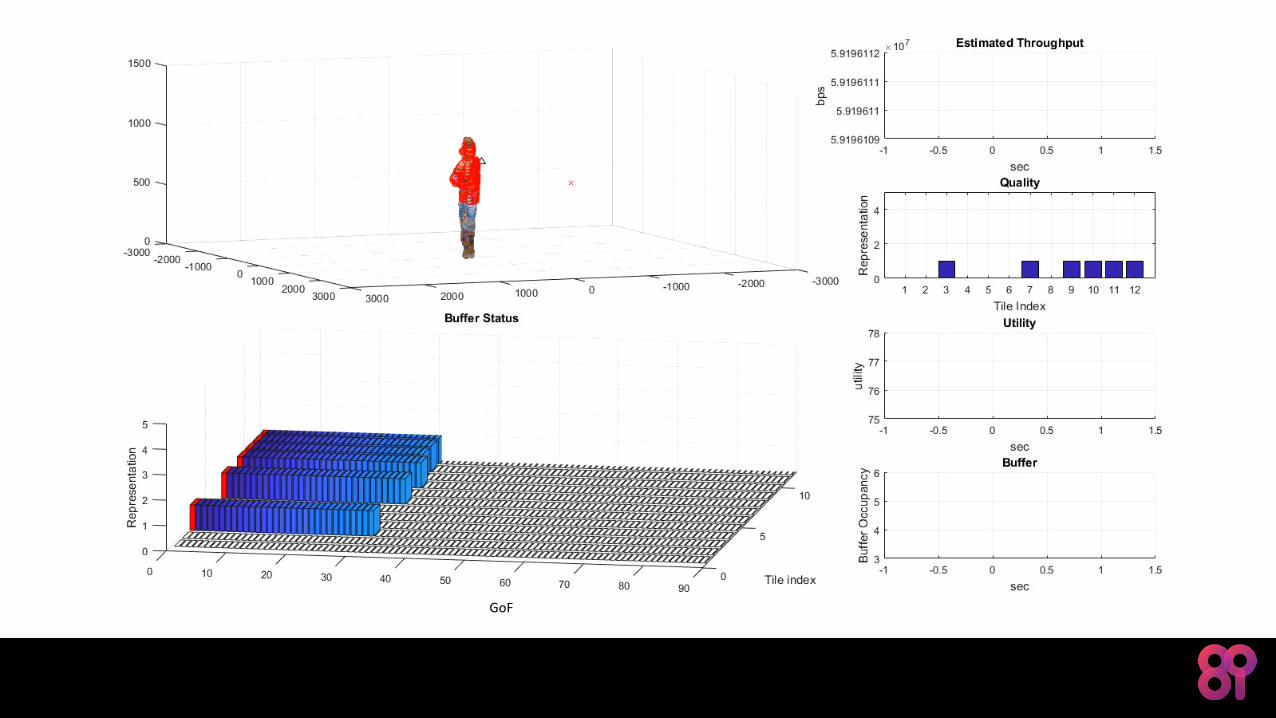
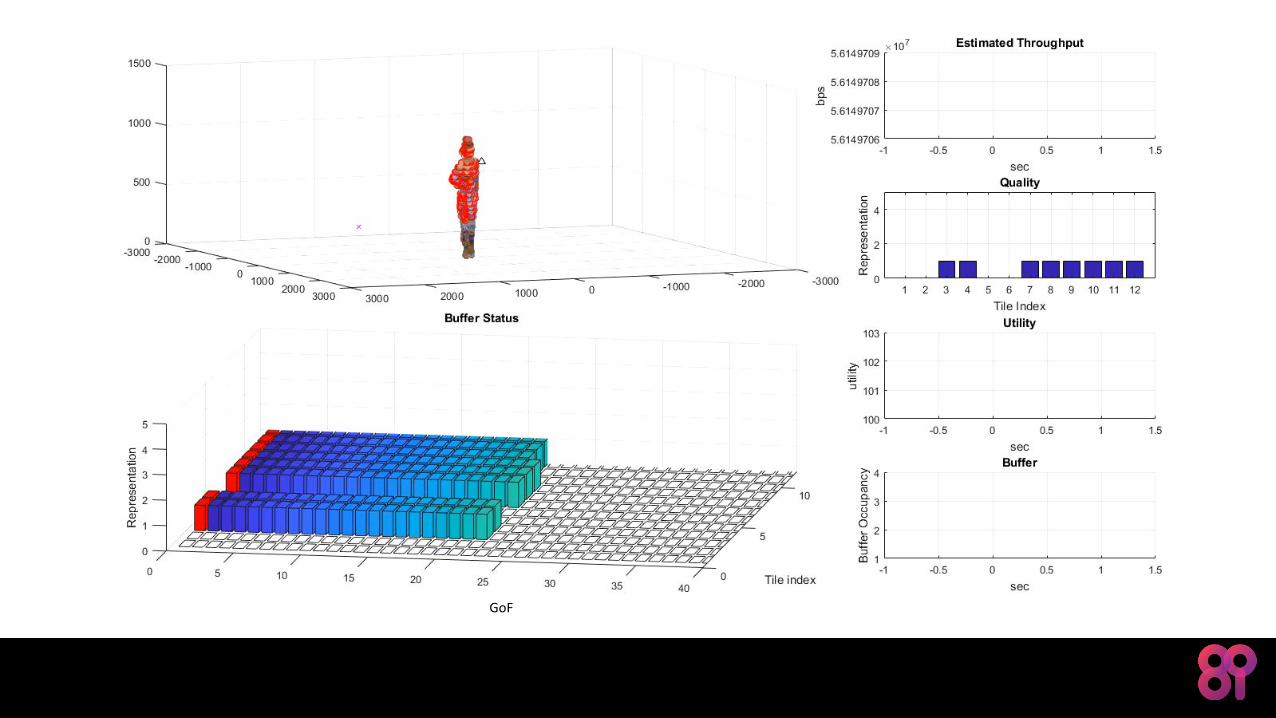
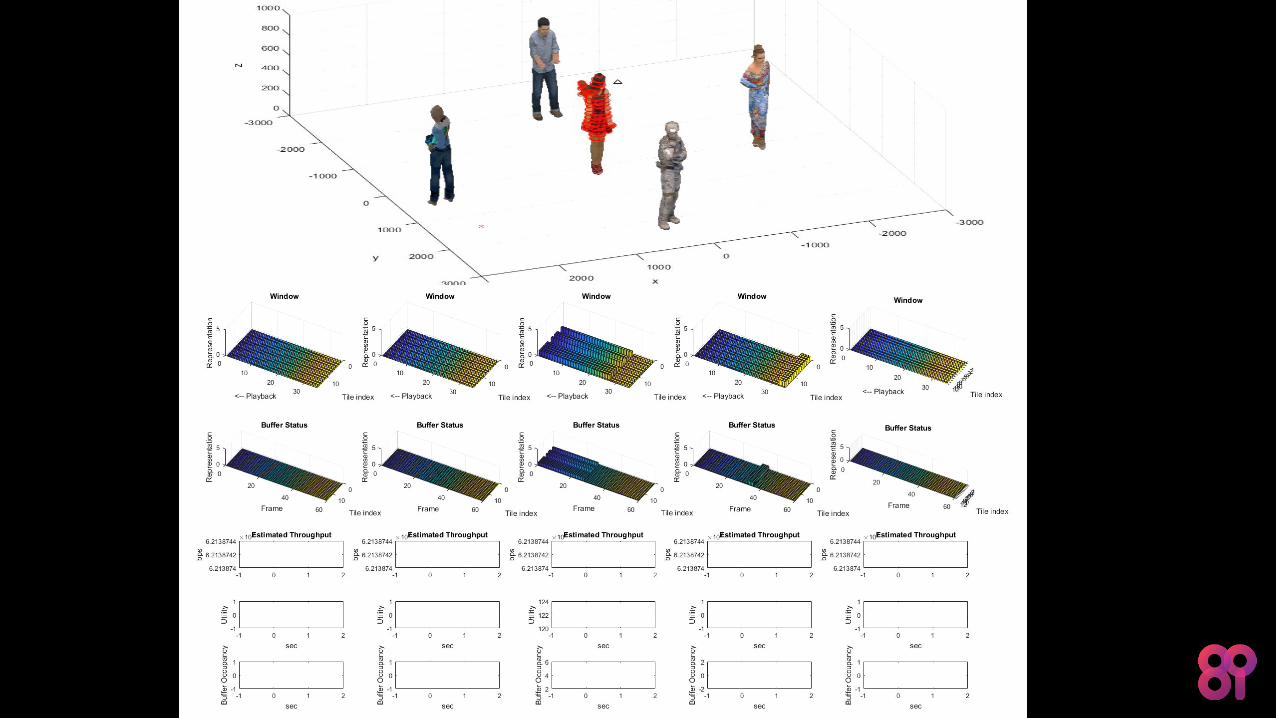
Streaming of Volumetric MediaJounsup Park, Philip A. Chou, and Jenq-Neng Hwang, “Rate-Utility Optimized Streaming of Volumetric Media for Augmented Reality,” arXiv:1804.09864.Also submitted to IEEE JETCAS special issue on immersive video,and to appear at Globecom 2018.
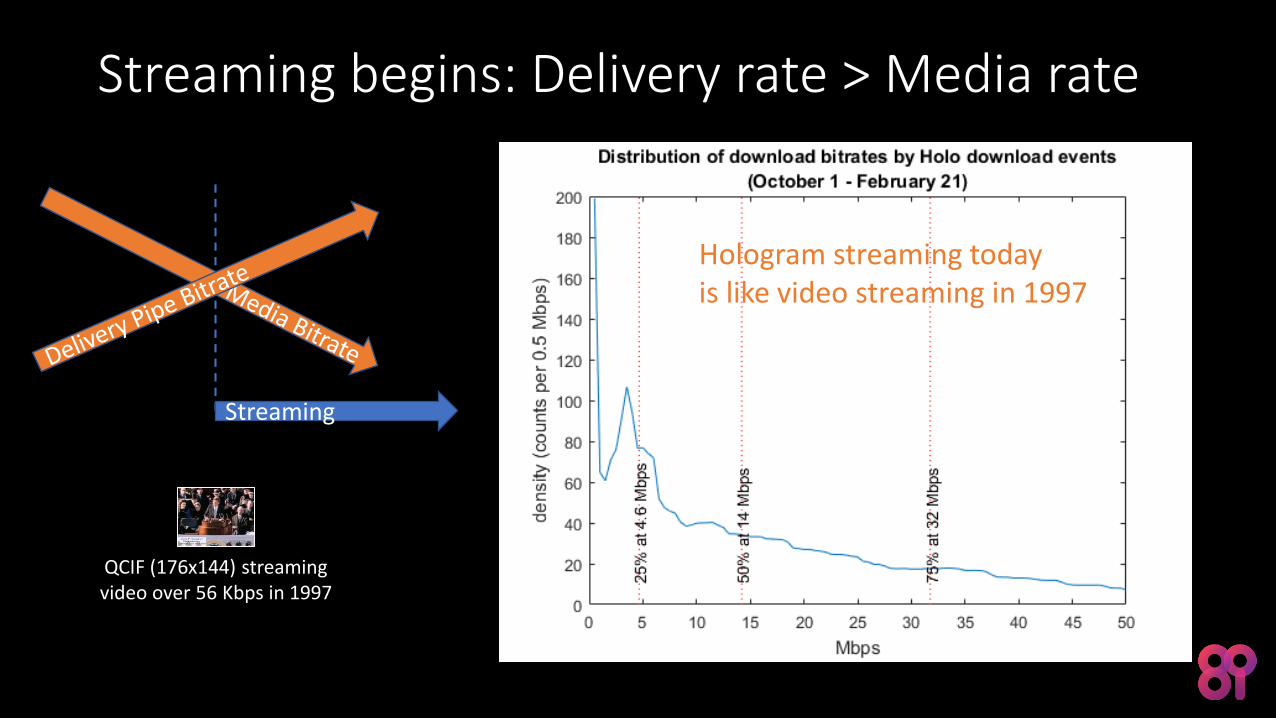
Streaming begins: Delivery rate > Media rate
Streaming
QCIF (176x144) streaming video over 56 Kbps in 1997
Hologram streaming todayis like video streaming in 1997
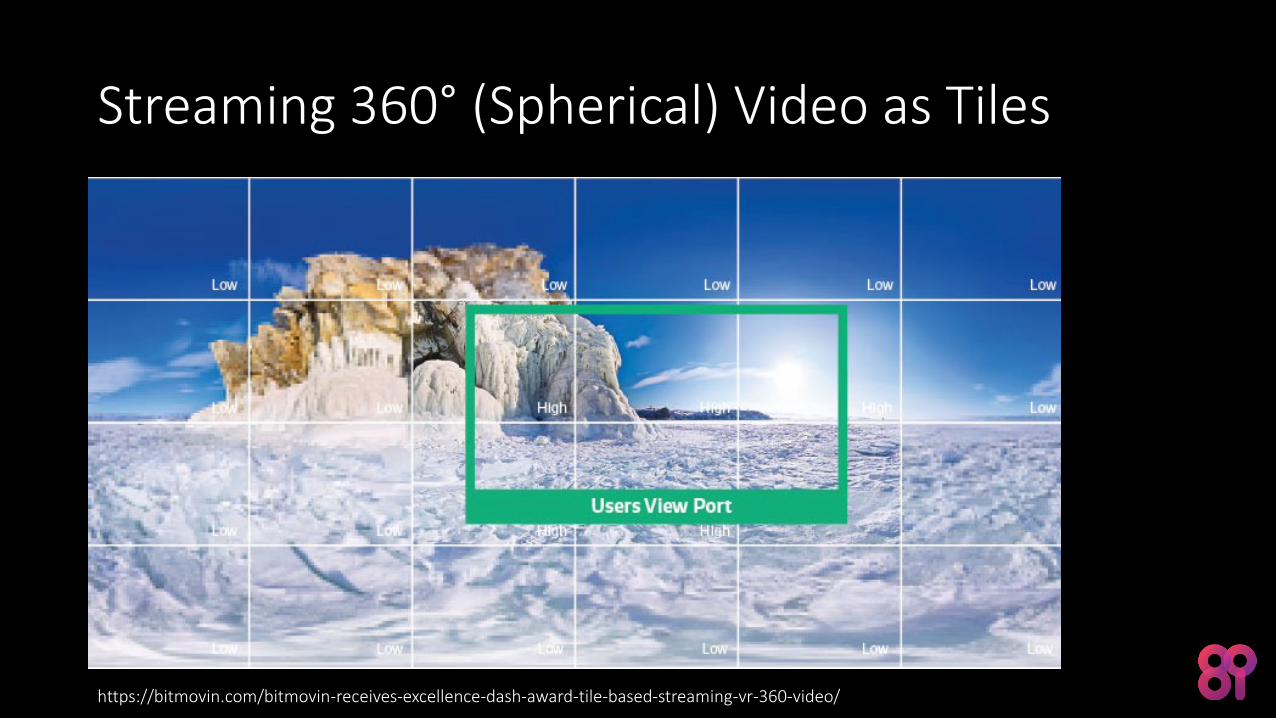
Streaming 360° (Spherical) Video as Tiles
https://bitmovin.com/bitmovin-receives-excellence-dash-award-tile-based-streaming-vr-360-video/
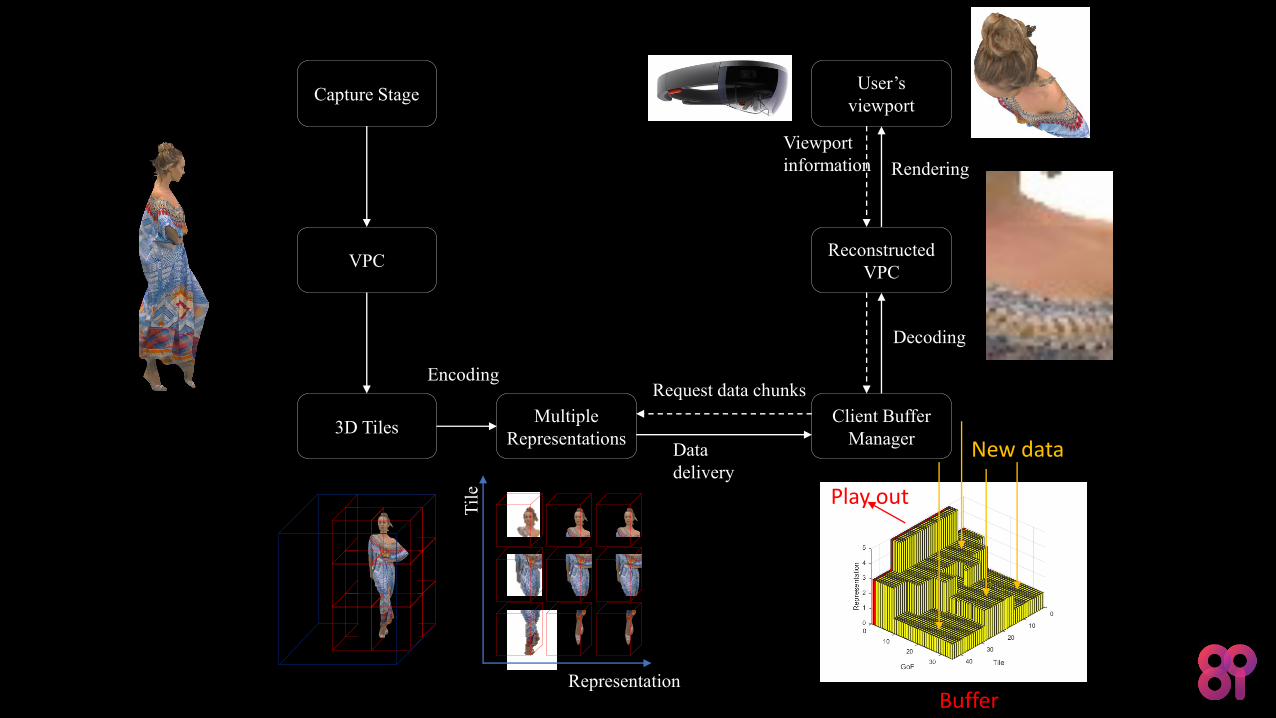
Capture Stage
VPC
3D TilesMultiple
Representations
Client Buffer
Manager
Reconstructed
VPC
User’s
viewport
Decoding
Rendering
Request data chunks
Viewport
information
Encoding
Representation
Til
e
Data
delivery
Play out
New data
Buffer
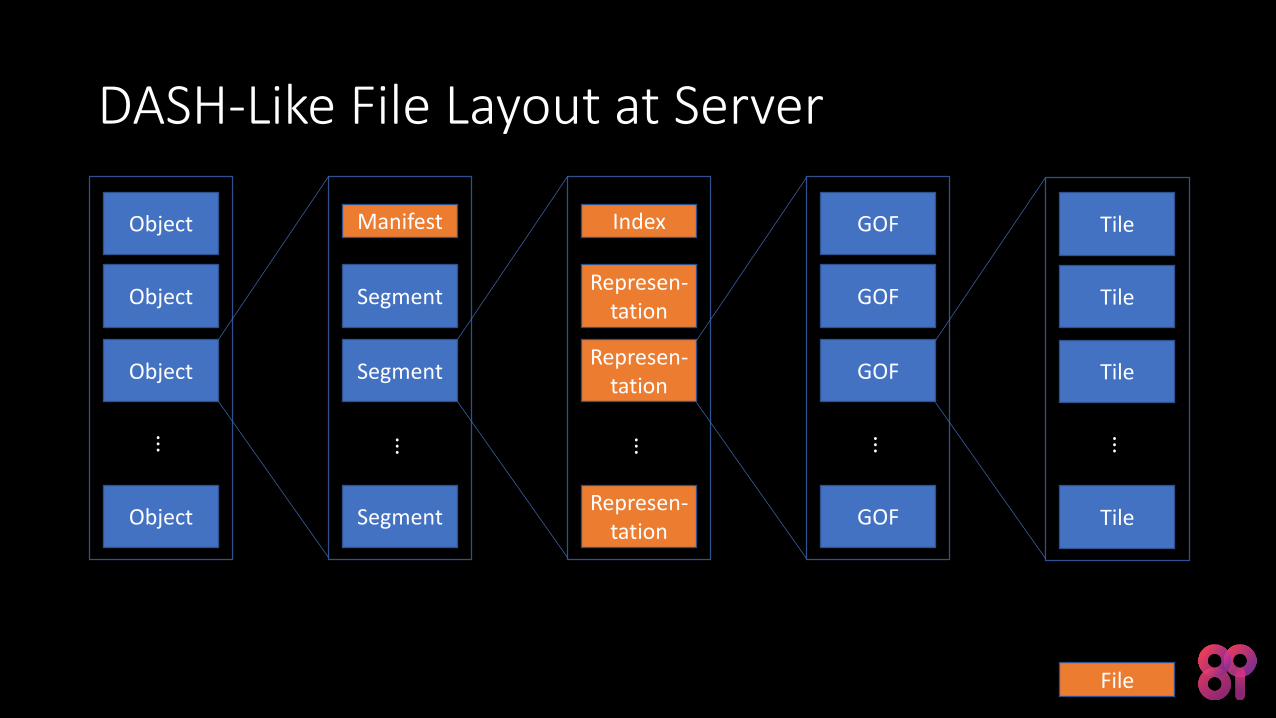
Object
Object
Object
Object
Segment
Manifest
Segment
Segment
Represen-tation
Represen-tation
Represen-tation
GOF
GOF
GOF
GOF
Tile
Tile
Tile
⋮
Tile
Index
⋮⋮⋮⋮
File
DASH-Like File Layout at Server
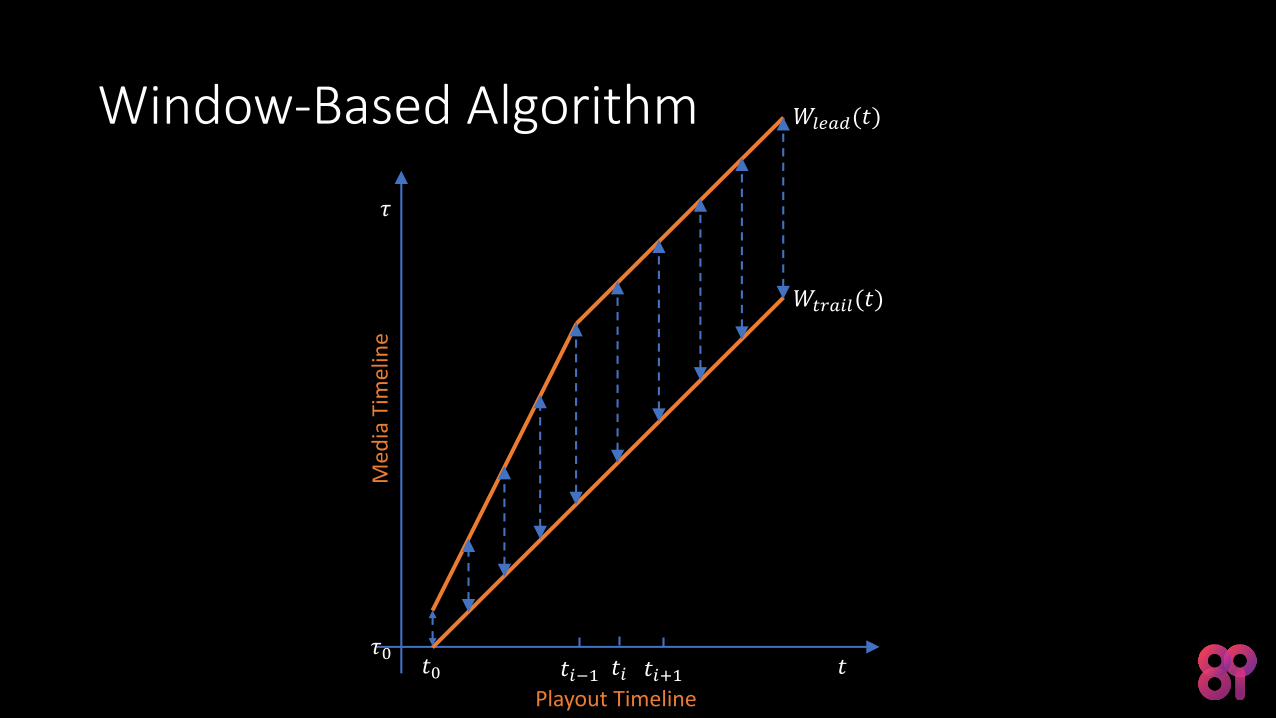
Window-Based Algorithm 𝑊𝑙𝑒𝑎𝑑(𝑡)
𝑊𝑡𝑟𝑎𝑖𝑙(𝑡)
𝑡0 𝑡𝜏0
𝜏
Med
ia T
imel
ine
Playout Timeline
𝑡𝑖 𝑡𝑖+1𝑡𝑖−1
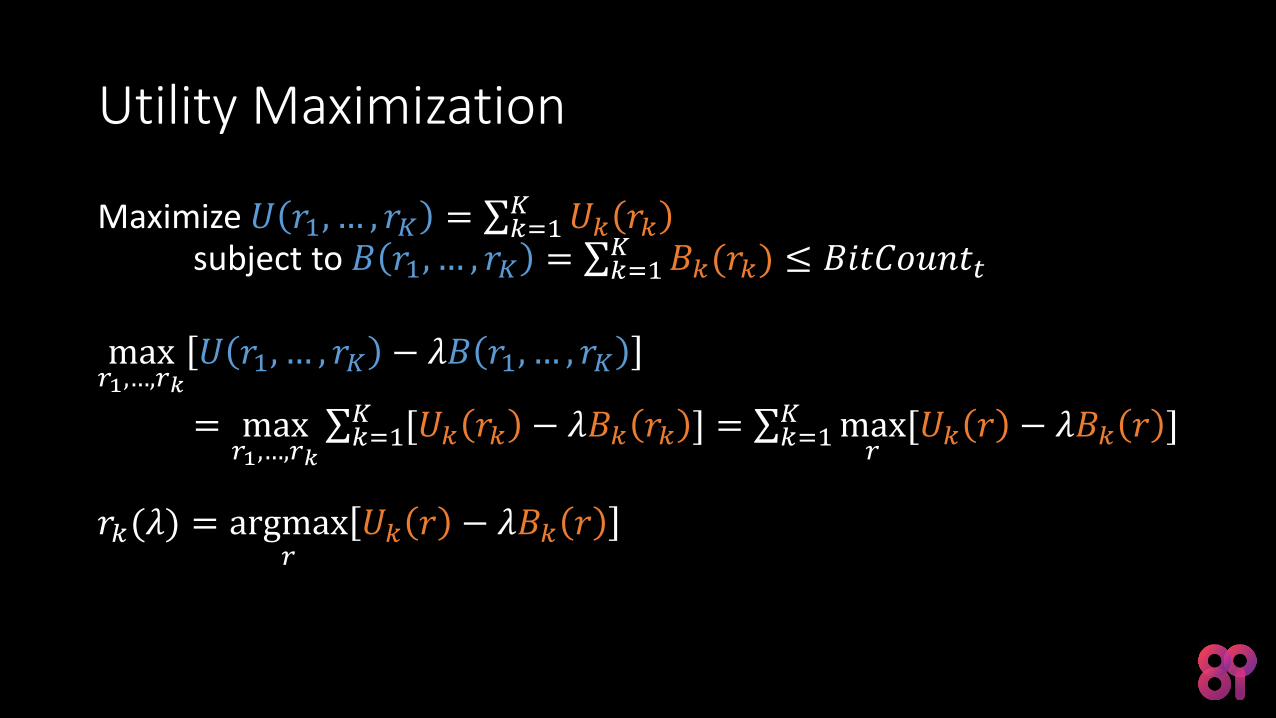
Utility Maximization
Maximize 𝑈 𝑟1, … , 𝑟𝐾 = ∑𝑘=1𝐾 𝑈𝑘 𝑟𝑘
subject to 𝐵 𝑟1, … , 𝑟𝐾 = ∑𝑘=1𝐾 𝐵𝑘(𝑟𝑘) ≤ 𝐵𝑖𝑡𝐶𝑜𝑢𝑛𝑡𝑡
max𝑟1,…,𝑟𝑘
𝑈 𝑟1, … , 𝑟𝐾 − 𝜆𝐵 𝑟1, … , 𝑟𝐾
= max𝑟1,…,𝑟𝑘
∑𝑘=1𝐾 [𝑈𝑘 𝑟𝑘 − 𝜆𝐵𝑘 𝑟𝑘 ] = ∑𝑘=1
𝐾 max𝑟[𝑈𝑘 𝑟 − 𝜆𝐵𝑘 𝑟 ]
𝑟𝑘(𝜆) = argmax𝑟
𝑈𝑘 𝑟 − 𝜆𝐵𝑘 𝑟
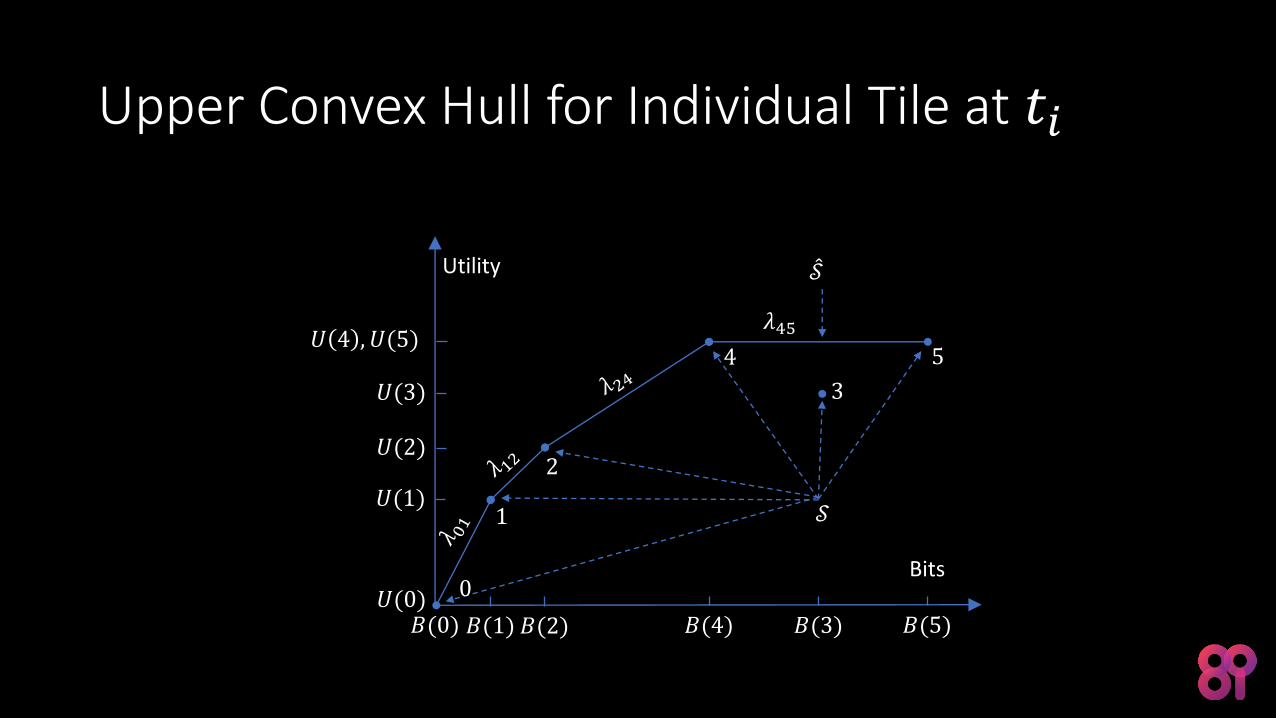
Upper Convex Hull for Individual Tile at 𝑡𝑖
𝐵(4)𝑈(0)
𝑈 4 , 𝑈(5)
𝑈(2)
Utility
𝒮
መ𝒮
5
3
4
2
1
0
𝐵(1) 𝐵(2) 𝐵(3) 𝐵(5)𝐵(0)
𝑈(1)
𝑈(3)
Bits
𝜆45
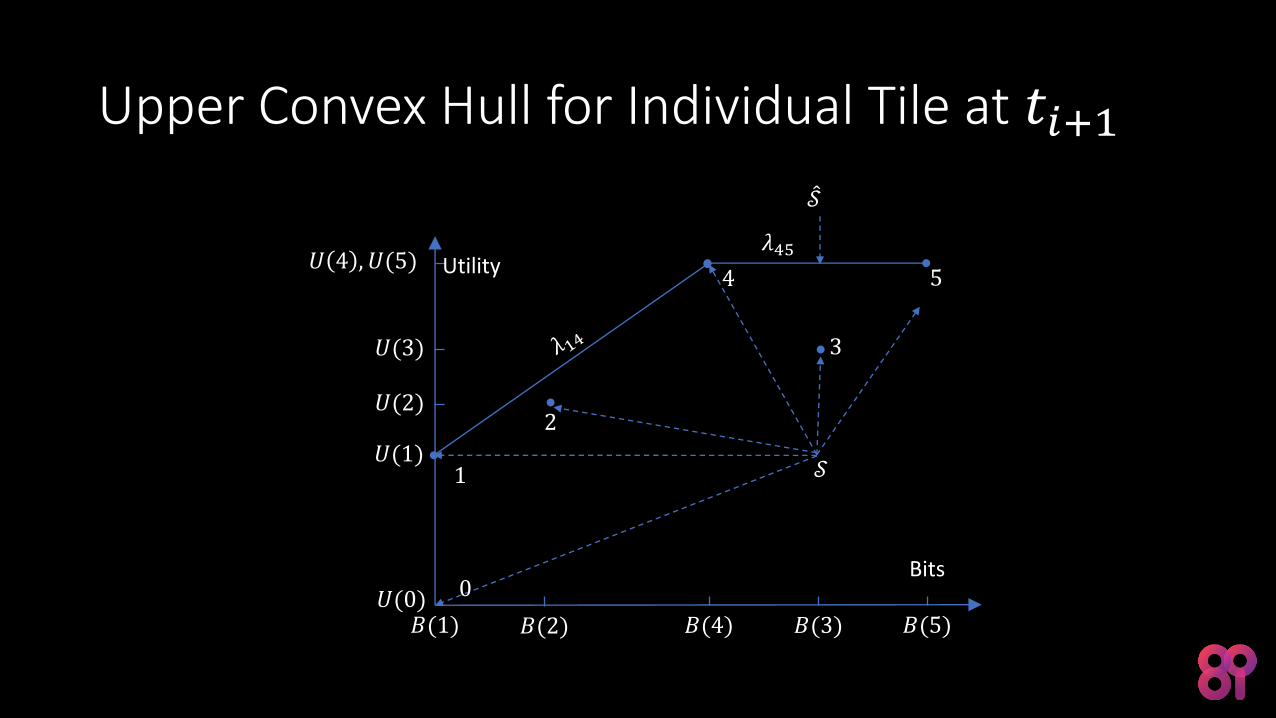
Upper Convex Hull for Individual Tile at 𝑡𝑖+1
𝐵(4)𝑈(0)
𝑈 4 , 𝑈(5)
𝑈(2)
Utility
𝒮
መ𝒮
5
3
4
2
1
0
𝐵(2) 𝐵(3) 𝐵(5)𝐵(1)
𝑈(1)
𝑈(3)
Bits
𝜆45
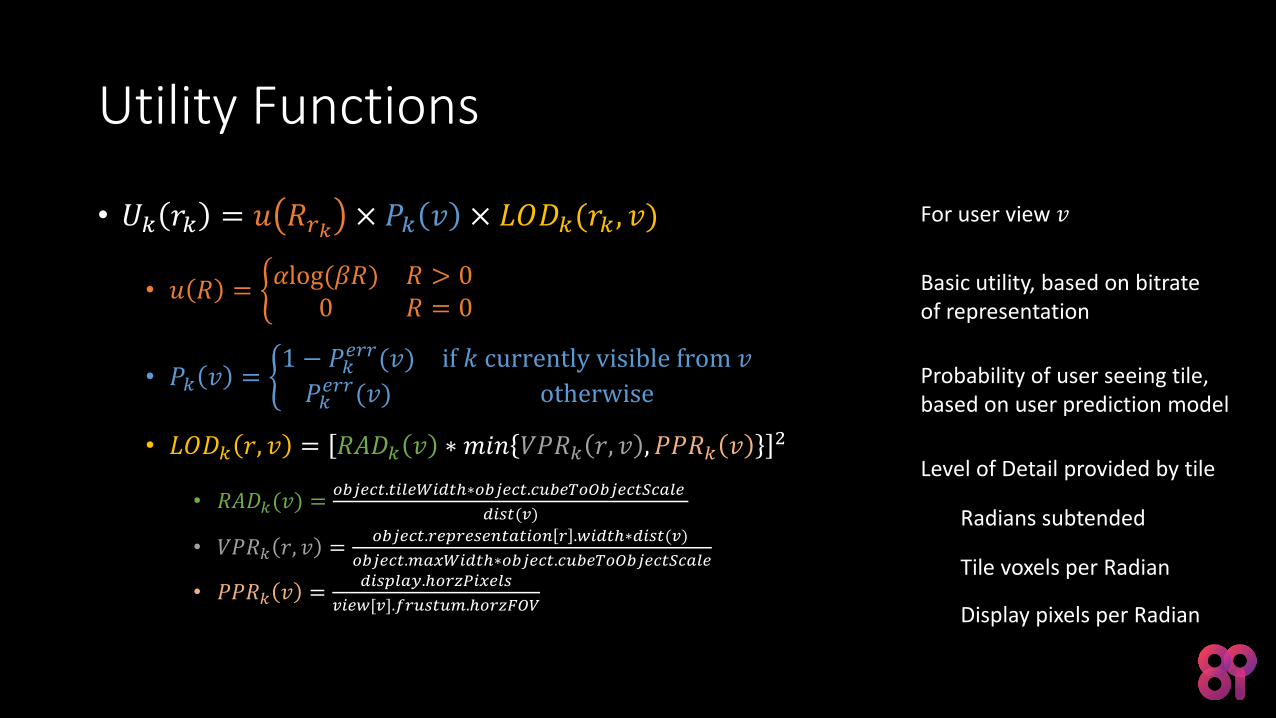
Utility Functions
• 𝑈𝑘 𝑟𝑘 = 𝑢 𝑅𝑟𝑘 × 𝑃𝑘 𝑣 × 𝐿𝑂𝐷𝑘(𝑟𝑘 , 𝑣)
• 𝑢 𝑅 = ቊ𝛼log(𝛽𝑅) 𝑅 > 0
0 𝑅 = 0
• 𝑃𝑘 𝑣 = ቊ1 − 𝑃𝑘
𝑒𝑟𝑟(𝑣) if 𝑘 currently visible from 𝑣
𝑃𝑘𝑒𝑟𝑟(𝑣) otherwise
• 𝐿𝑂𝐷𝑘 𝑟, 𝑣 = 𝑅𝐴𝐷𝑘 𝑣 ∗ 𝑚𝑖𝑛 𝑉𝑃𝑅𝑘 𝑟, 𝑣 , 𝑃𝑃𝑅𝑘 𝑣 2
• 𝑅𝐴𝐷𝑘(𝑣) =𝑜𝑏𝑗𝑒𝑐𝑡.𝑡𝑖𝑙𝑒𝑊𝑖𝑑𝑡ℎ∗𝑜𝑏𝑗𝑒𝑐𝑡.𝑐𝑢𝑏𝑒𝑇𝑜𝑂𝑏𝑗𝑒𝑐𝑡𝑆𝑐𝑎𝑙𝑒
𝑑𝑖𝑠𝑡(𝑣)
• 𝑉𝑃𝑅𝑘 𝑟, 𝑣 =𝑜𝑏𝑗𝑒𝑐𝑡.𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑎𝑡𝑖𝑜𝑛 𝑟 .𝑤𝑖𝑑𝑡ℎ∗𝑑𝑖𝑠𝑡(𝑣)
𝑜𝑏𝑗𝑒𝑐𝑡.𝑚𝑎𝑥𝑊𝑖𝑑𝑡ℎ∗𝑜𝑏𝑗𝑒𝑐𝑡.𝑐𝑢𝑏𝑒𝑇𝑜𝑂𝑏𝑗𝑒𝑐𝑡𝑆𝑐𝑎𝑙𝑒
• 𝑃𝑃𝑅𝑘 𝑣 =𝑑𝑖𝑠𝑝𝑙𝑎𝑦.ℎ𝑜𝑟𝑧𝑃𝑖𝑥𝑒𝑙𝑠
𝑣𝑖𝑒𝑤[𝑣].𝑓𝑟𝑢𝑠𝑡𝑢𝑚.ℎ𝑜𝑟𝑧𝐹𝑂𝑉
Basic utility, based on bitrate of representation
Probability of user seeing tile, based on user prediction model
Level of Detail provided by tile
Radians subtended
Tile voxels per Radian
Display pixels per Radian
For user view 𝑣
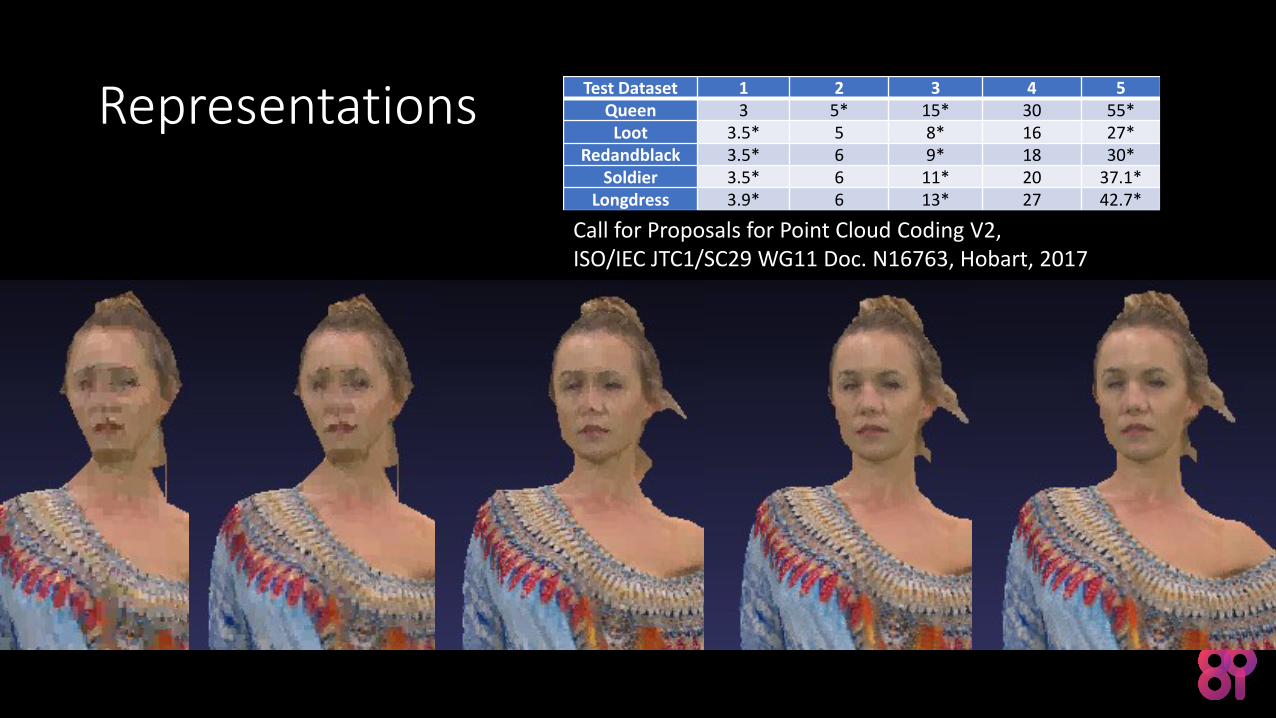
RepresentationsTest Dataset 1 2 3 4 5
Queen 3 5* 15* 30 55*Loot 3.5* 5 8* 16 27*
Redandblack 3.5* 6 9* 18 30*Soldier 3.5* 6 11* 20 37.1*
Longdress 3.9* 6 13* 27 42.7*
Call for Proposals for Point Cloud Coding V2,ISO/IEC JTC1/SC29 WG11 Doc. N16763, Hobart, 2017
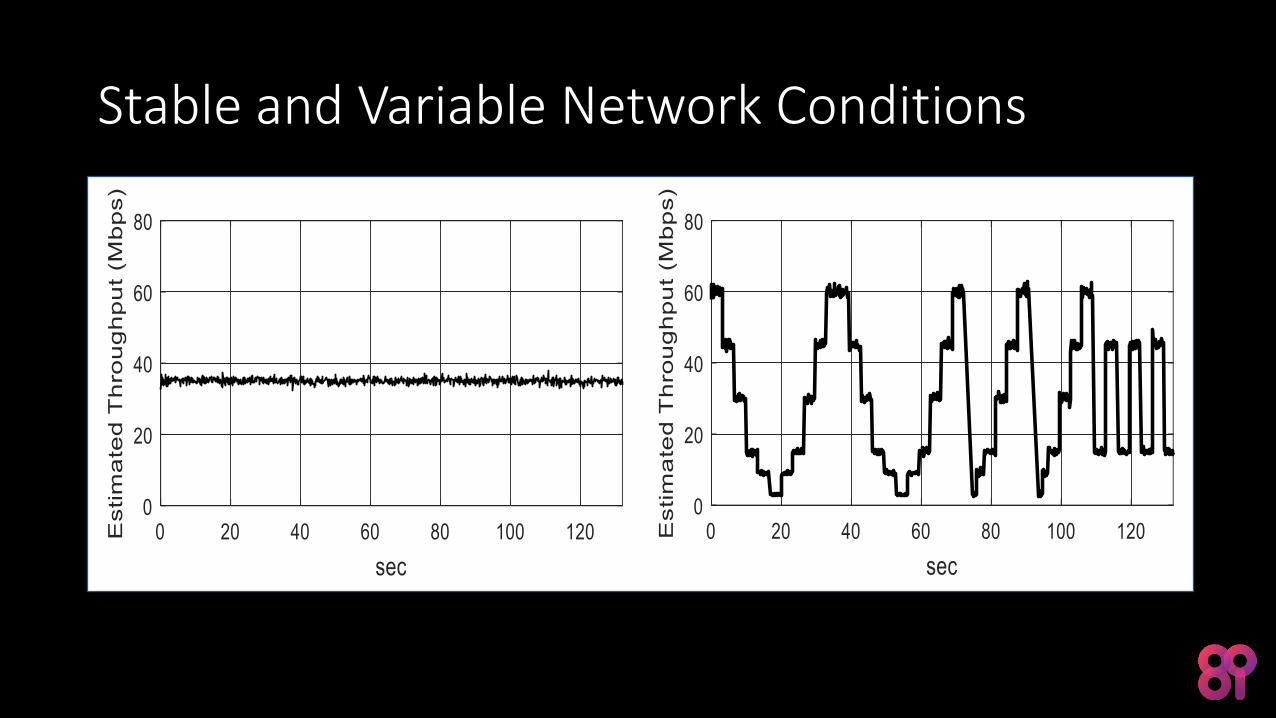
Stable and Variable Network Conditions
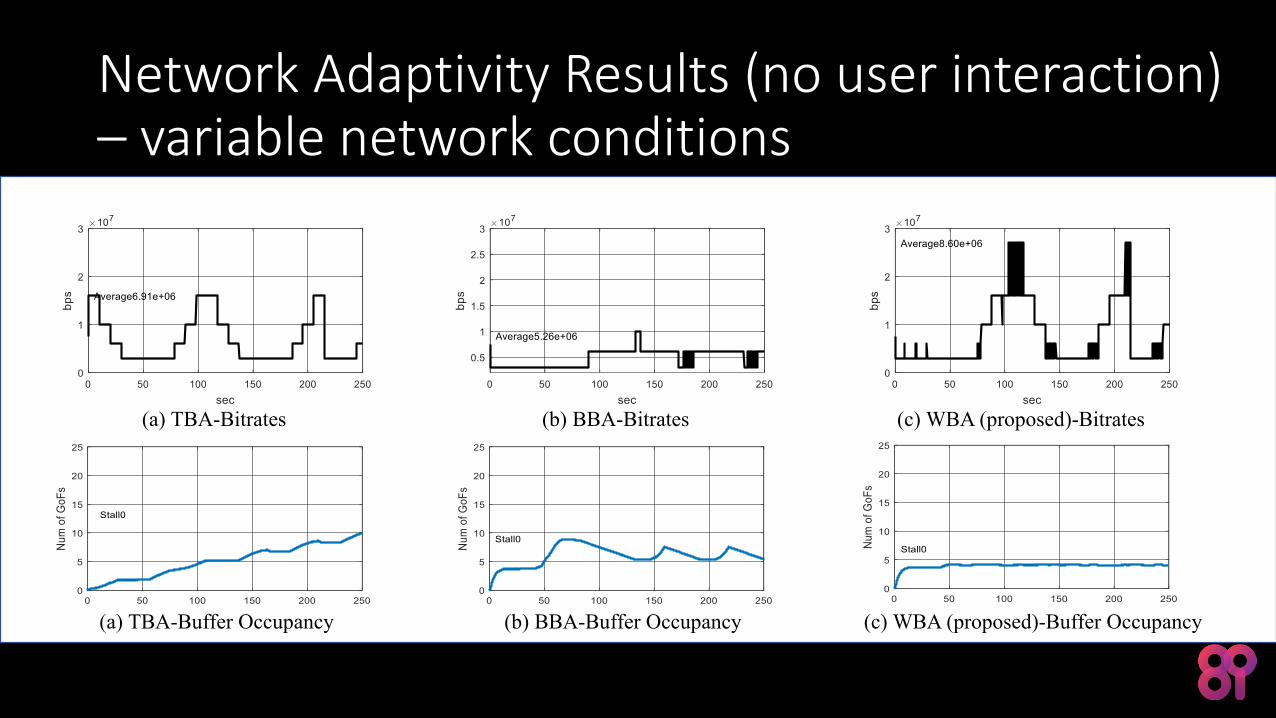
Network Adaptivity Results (no user interaction) – variable network conditions
(a) TBA-Bitrates (b) BBA-Bitrates (c) WBA (proposed)-Bitrates
(a) TBA-Buffer Occupancy (b) BBA-Buffer Occupancy (c) WBA (proposed)-Buffer Occupancy
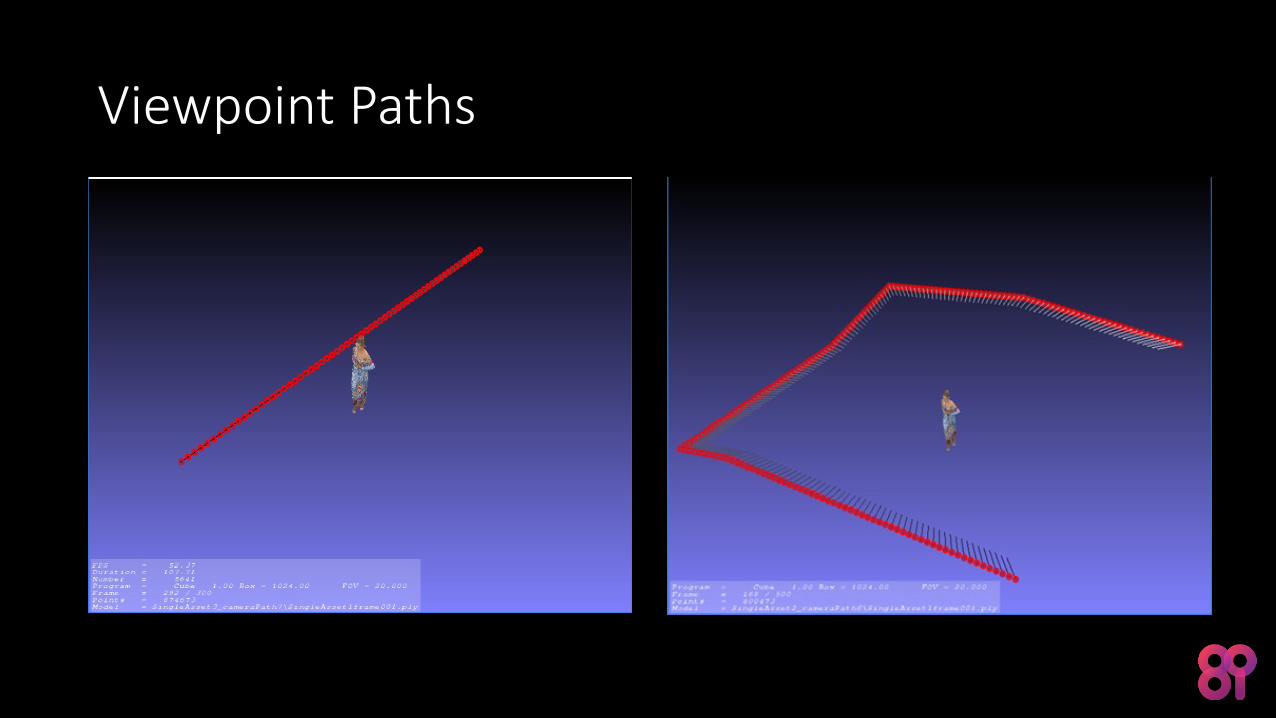
Viewpoint Paths
GoF
GoF
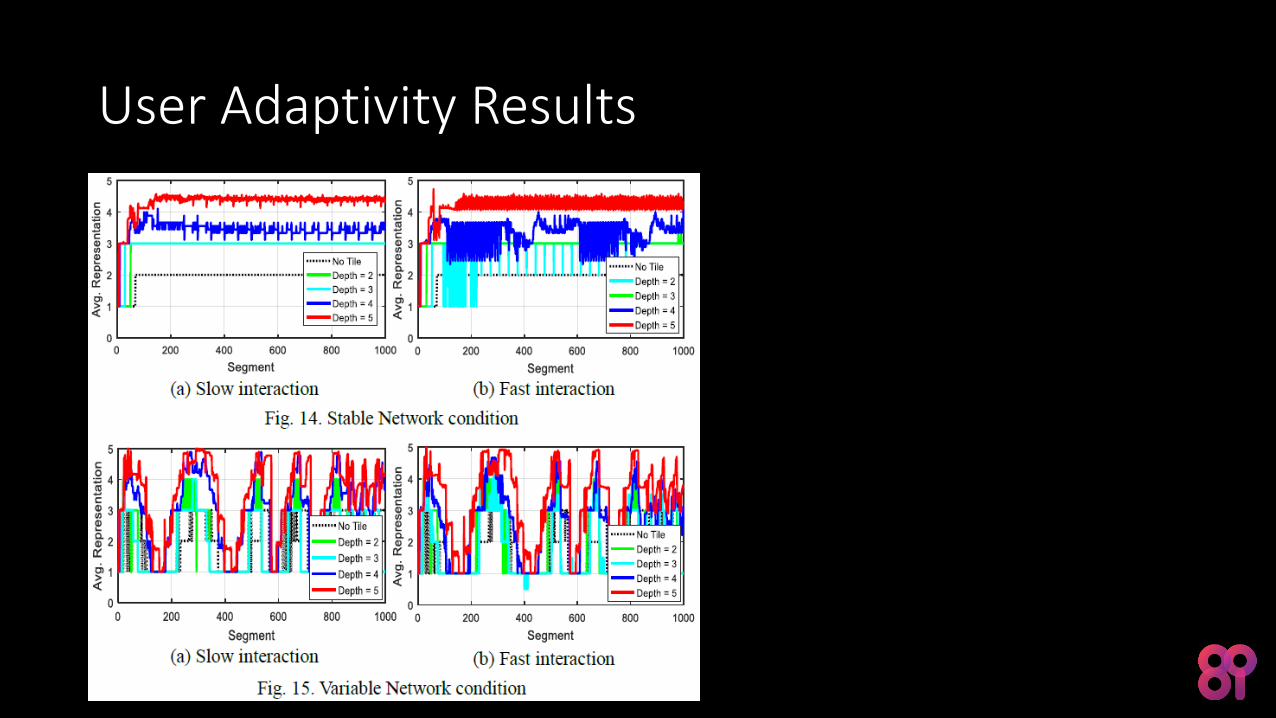
User Adaptivity Results
Conclusion: Challenges Ahead
Theses of this talk
Hologram compression todayis like video compression in 1988
Hologram streaming todayis like video streaming in 1997
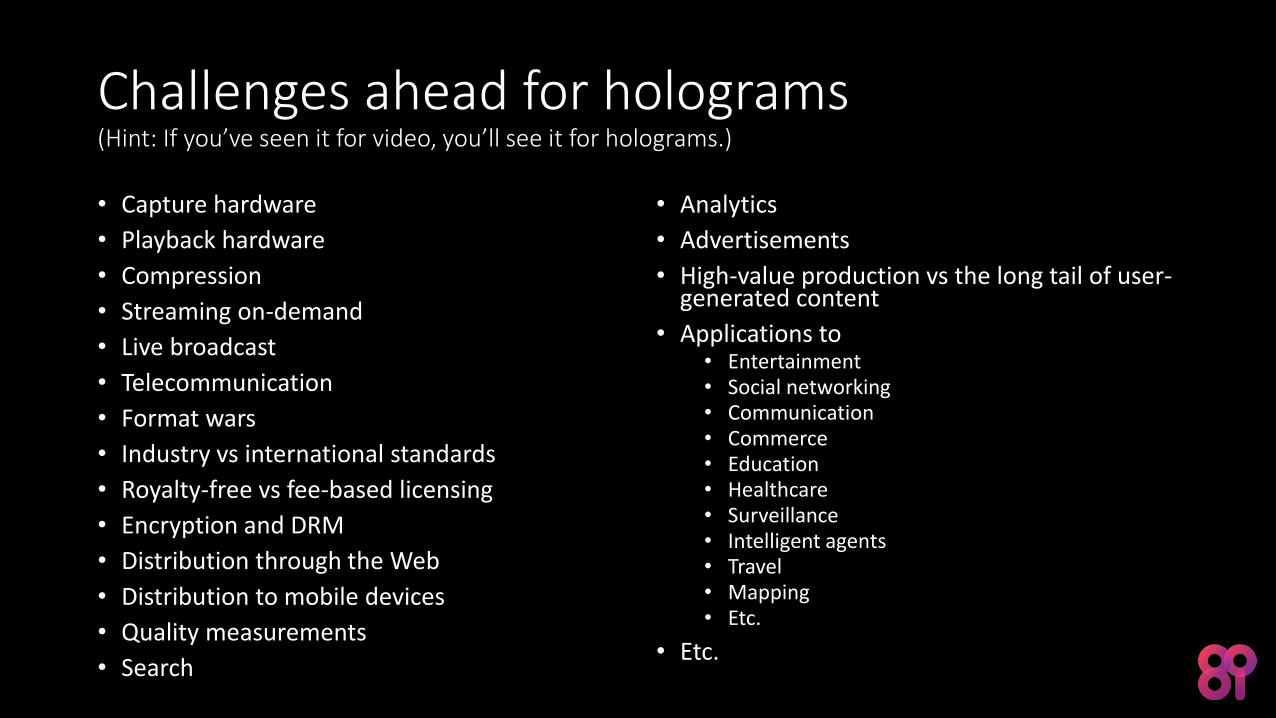
Challenges ahead for holograms(Hint: If you’ve seen it for video, you’ll see it for holograms.)
• Capture hardware
• Playback hardware
• Compression
• Streaming on-demand
• Live broadcast
• Telecommunication
• Format wars
• Industry vs international standards
• Royalty-free vs fee-based licensing
• Encryption and DRM
• Distribution through the Web
• Distribution to mobile devices
• Quality measurements
• Search
• Analytics
• Advertisements
• High-value production vs the long tail of user-generated content
• Applications to• Entertainment• Social networking• Communication• Commerce• Education• Healthcare• Surveillance• Intelligent agents• Travel• Mapping• Etc.
• Etc.
Holograms are the Next VideoPhilip A. Chou, 8i Labs, Inc.
ACM Multimedia Systems Conference13 June 2018

![Web-scale Multimedia Search for Internet Video Contentlujiang/resources/proposal_slides.pdf · ACM International Conference on Multimedia Retrieval (ICMR), 2015. [MM12] Lu Jiang,](https://static.fdocuments.net/doc/165x107/606030c6a7157561df6fafce/web-scale-multimedia-search-for-internet-video-lujiangresourcesproposalslidespdf.jpg)