Hıza duyarlı kasis sunum
20
-
Upload
gokhan1985 -
Category
Technology
-
view
824 -
download
5
Transcript of Hıza duyarlı kasis sunum

Kasis Nedir? Nerelerde Kullanılır?
Yol kasisi, genel anlamı ile motorlu ya da motorsuz taşıtlarınhızlarının azaltılması gereken alanlarda zemine uygulanan ve çeşitlitiplere ayrılan ürünlerin genel adıdır.
Yol kasisi genel olarak okul, hastane gibi yaya trafiğininoluştuğu genel alanlar ile fabrika, depo gibi yükleme boşaltmayapılan sahalarda can ve mal kaybının yaşanma riski olanortamlarda ve keskin virajlar ve benzeri tehlikeler içeren yoldurumlarında emniyet sağlamak gereken her ortamda yol kasisikullanılır.

Böyle bir projeye neden ihtiyaç vardır?
Kasislerin kullanılmasındaki ana amaç gerek yaya gereksetaşıt trafiğinin yoğun olduğu alanlarda trafiği ağırlaştırmaktır.Böylece hızlı araçların trafikte oluşturabileceği tehditlerin önünegeçilmiş olunur. Hız kesici kasisler ile hızlı olan araçların hızlarıdüşürülmüşken, trafikte ağır seyreden ve herhangi bir tehditoluşturmayan araçların da bu engele maruz kalması araçkullanıcılarını rahatsız etmektedir. Bu rahatsızlığı gidermek ve trafiğidaha akıcı hale getirmek ve daha da rahat bir ulaşım sağlamakamacıyla yapılan proje ile trafikte hızlı seyreden araçlar için standartbir hız kesici kasis, trafikte hızını kurallara uygun tutan araçlar içinengelsiz bir yol imkânı sunulmaktadır.
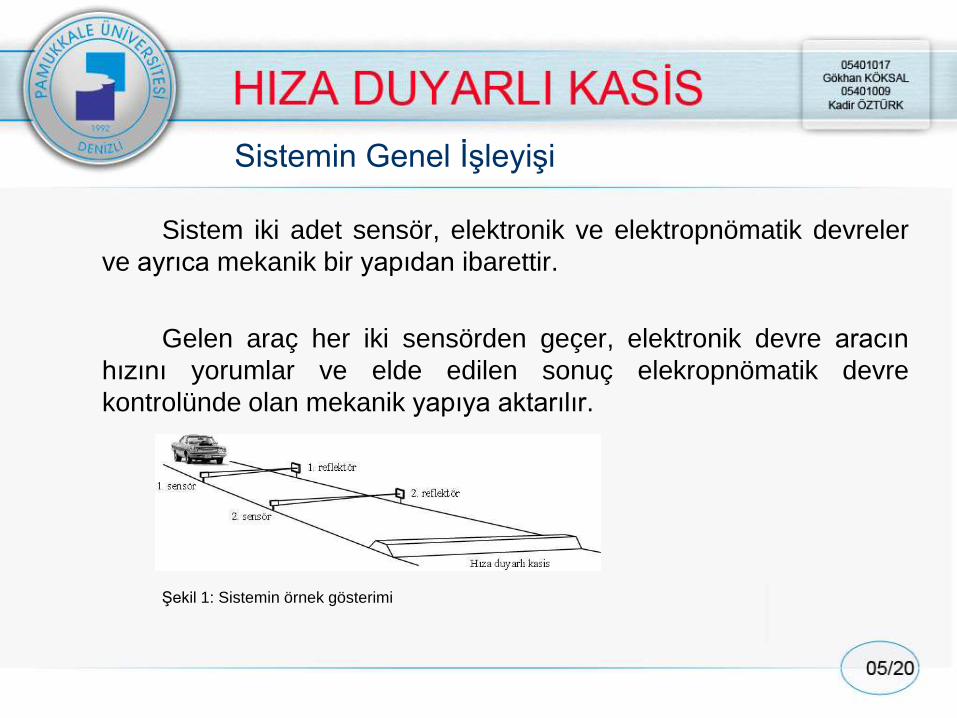
Sistemin Genel İşleyişi
Sistem iki adet sensör, elektronik ve elektropnömatik devreler
ve ayrıca mekanik bir yapıdan ibarettir.
Gelen araç her iki sensörden geçer, elektronik devre aracın
hızını yorumlar ve elde edilen sonuç elekropnömatik devre
kontrolünde olan mekanik yapıya aktarılır.
Şekil 1: Sistemin örnek gösterimi
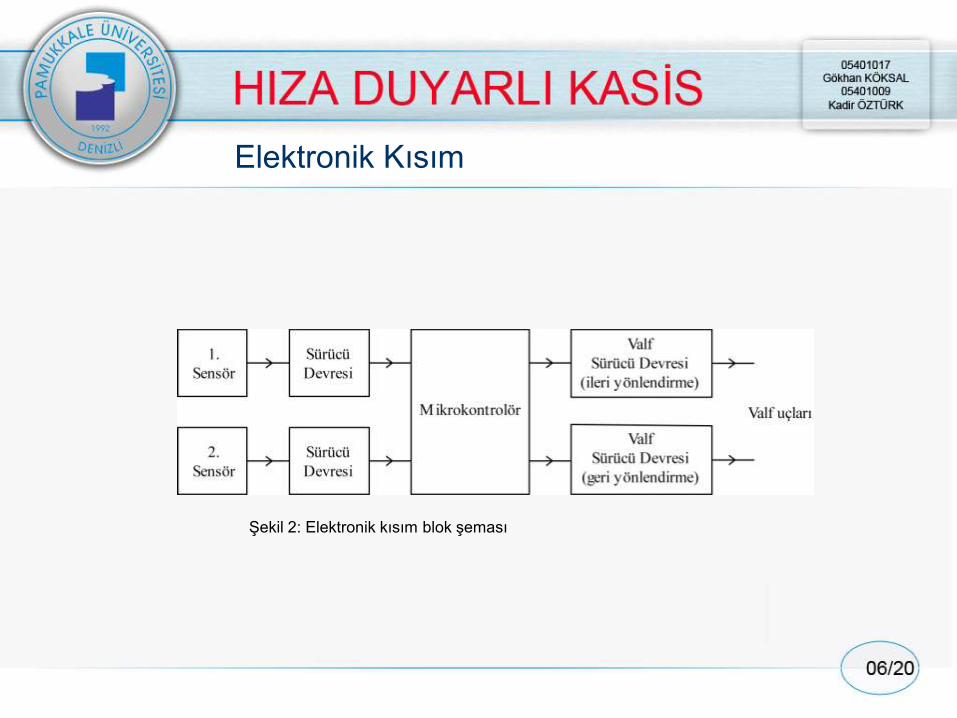
Elektronik Kısım
Şekil 2: Elektronik kısım blok şeması

Sensörler
Şekil3: RP32-L4000N-CY6C4U2-PF NPN Tipli fotoelektrik sensör ve kullanım şekli
Kullanılan sensör tipi fotoelektrik sensördür. Fotoelektrik sensörler çok uzun algılama mesafesine sahip olduklarından dolayı tercih edilmiştir. Fotoelektrik sensörlerin algılama mesafesi, tipi ve modeline göre metrelerce uzayabilir. Yol üzerinde sensör ve bu sensöre karşılık gelen reflektör bulunmaktadır. Sensör ile reflektör arasına giren bir araç sensör çıkışını aktif etmiş olur. Sensör çıkışı, sürücü devresine giriş oluşturacaktır.
Sensör DC 10…30V arasında bir besleme ile çalışmaktadır. Çıkış ucundan alınan genliğin değeri, sensöre uygulanan besleme ile aynı değere sahiptir.

+5V ve +12 Besleme devresi
Şekil 4:
+5 ve +12 V
Besleme devresi
Bası devre
Üst görünüm
BR1
2W005G
VI1
VO3
GN
D2
U17812
C14700uF
C24700uF
VI1
VO3
GN
D2
U27805
C3100nF
C4100nF
TR1 AC220V
12V
+ 12V
0V
+ 5 V

+24V Besleme devresiŞekil 5:
+24V Besleme devresi
Baskı devre
Üst görünüm

Sürücü ve Mikrokontrolör Devresi
Şekil 6:
Sırasıyla
-
Sürücü devresi
ve
Mikrokontrolör
-
Baskı Devre (Bütün)
ve
Üst Görünüm
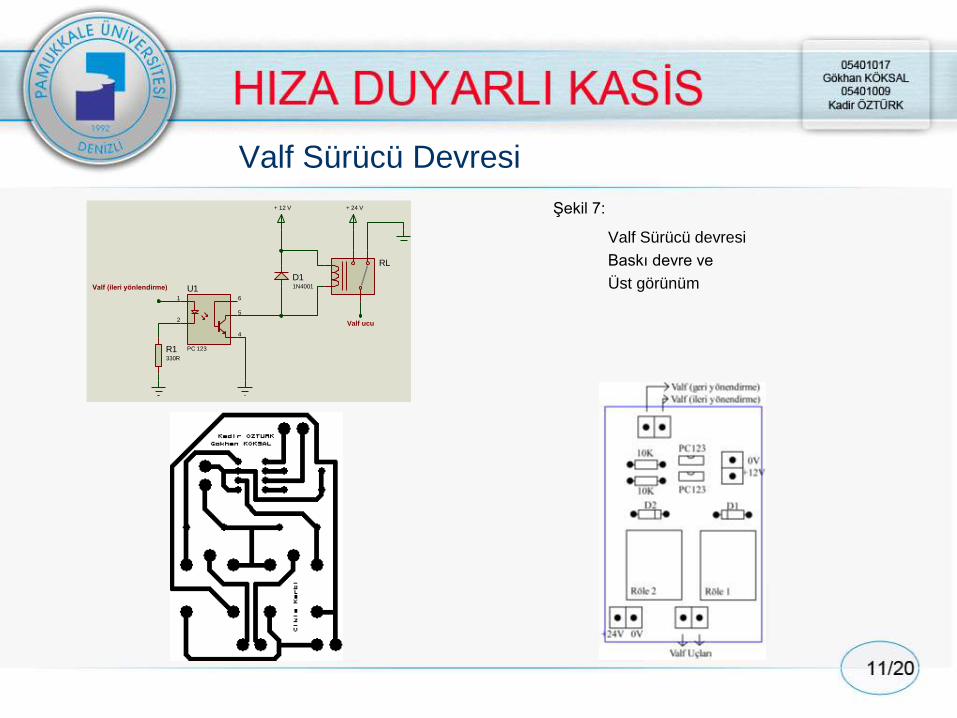
Valf Sürücü Devresi
Şekil 7:
Valf Sürücü devresi
Baskı devre ve
Üst görünüm
RL
6
5
4
1
2
U1
PC 123R1330R
Valf (ileri yönlendirme)
Valf ucu
+ 24 V
D11N4001
+ 12 V
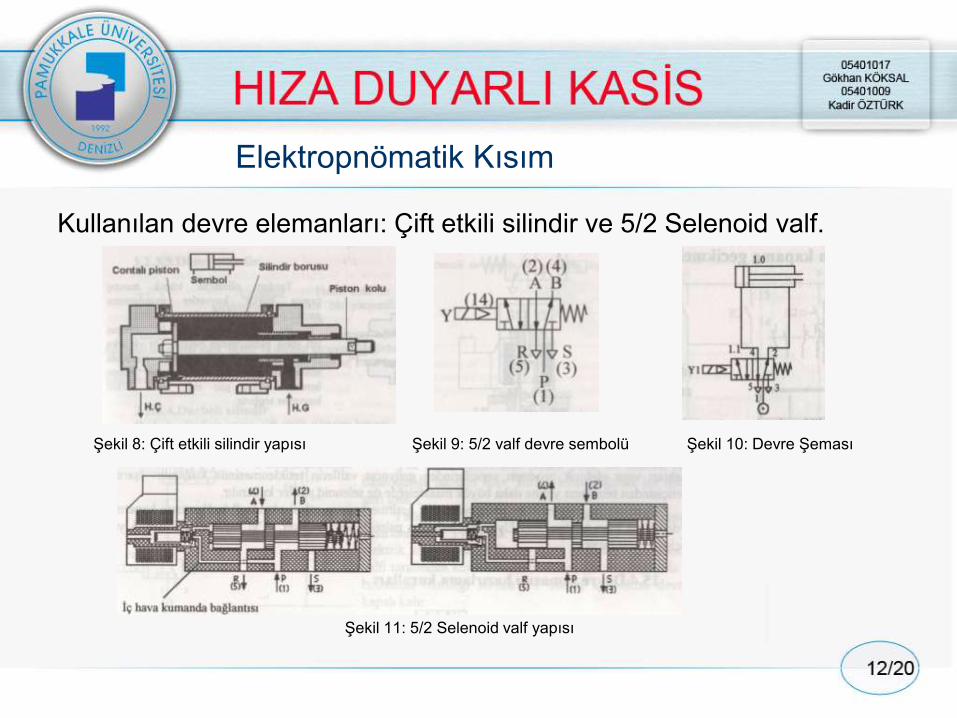
Elektropnömatik Kısım
Kullanılan devre elemanları: Çift etkili silindir ve 5/2 Selenoid valf.
Şekil 8: Çift etkili silindir yapısı Şekil 9: 5/2 valf devre sembolü Şekil 10: Devre Şeması
Şekil 11: 5/2 Selenoid valf yapısı

Yazılım
• #include <pic.h>
• #include "delay.h"
• __CONFIG(UNPROTECT&LVPDIS&BORDIS&MCLRDIS&PWRTDIS&WDTDIS&INTIO); //Genel Konfigürasyon ayarları yapılıyor
• #define yol 0x16 // Yol = iki sensör arası mesafe 22 metre
• unsigned int sayac=0, zaman=0, hiz=0;
• void port_init()
• {
• CMCON=7; //Port A'daki pinleri dijital olarak kullan
• TRISA=0x03; //Port A pinlerinin hepsini çıkış yap
• PORTA=0; //Port A'ya sıfır yükle
• }
• void timer_init()
• {
• T0CS=0; // Dahili osilatör
• PSA=0; // Prescaler TMR0 için
• PS2=1; // 1:256 bölüm değeri
• PS1=1;
• PS0=1;
• T0IF=0; // TMR0 kesme bayrağı temizleniyor
• T0IE=1; // TMR0 kesmesine izin veriliyor
• PEIE=1;
• }
Yazılım
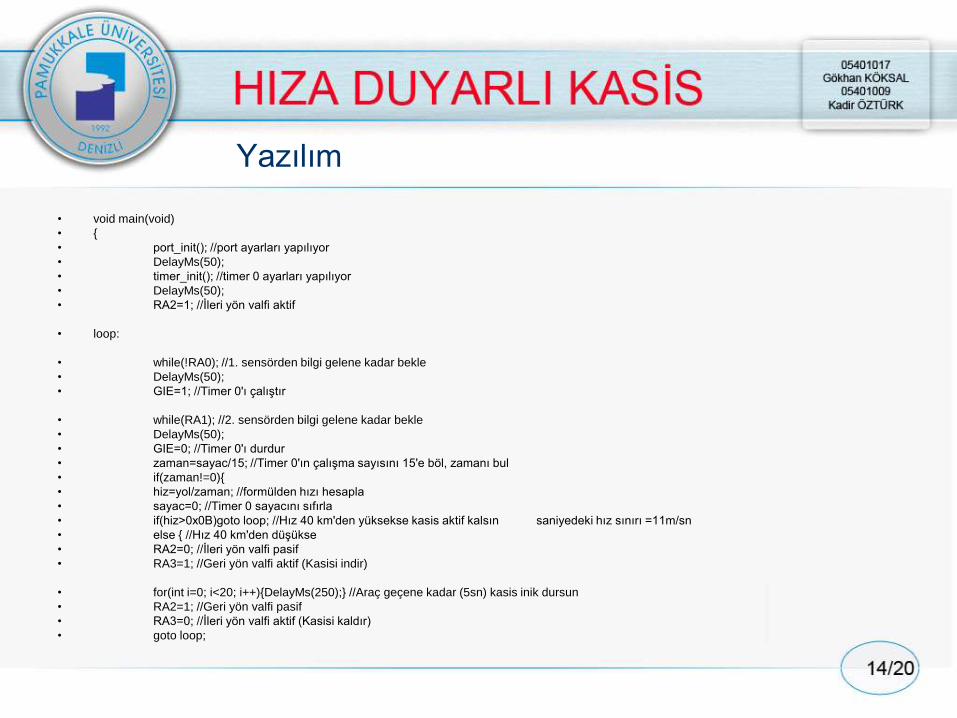
• void main(void)
• {
• port_init(); //port ayarları yapılıyor
• DelayMs(50);
• timer_init(); //timer 0 ayarları yapılıyor
• DelayMs(50);
• RA2=1; //İleri yön valfi aktif
• loop:
• while(!RA0); //1. sensörden bilgi gelene kadar bekle
• DelayMs(50);
• GIE=1; //Timer 0'ı çalıştır
• while(RA1); //2. sensörden bilgi gelene kadar bekle
• DelayMs(50);
• GIE=0; //Timer 0'ı durdur
• zaman=sayac/15; //Timer 0'ın çalışma sayısını 15'e böl, zamanı bul
• if(zaman!=0){
• hiz=yol/zaman; //formülden hızı hesapla
• sayac=0; //Timer 0 sayacını sıfırla
• if(hiz>0x0B)goto loop; //Hız 40 km'den yüksekse kasis aktif kalsın saniyedeki hız sınırı =11m/sn
• else { //Hız 40 km'den düşükse
• RA2=0; //İleri yön valfi pasif
• RA3=1; //Geri yön valfi aktif (Kasisi indir)
• for(int i=0; i<20; i++){DelayMs(250);} //Araç geçene kadar (5sn) kasis inik dursun
• RA2=1; //Geri yön valfi pasif
• RA3=0; //İleri yön valfi aktif (Kasisi kaldır)
• goto loop;
Yazılım
• }
• }
• else {
• sayac=0;
• goto loop;
• }
• }
• static void interrupt KESME()
• {
• sayac++; //Timer 0 her çalıştığında sayacı bir arttır
• T0IF=0;
• }

Mekanik Kısım
Şekil 12: Mekanik kısım genel görünümü
Şekil 13: Sisteme hareket kazandıran kısım

Uygulama ve Sağlama 1
HIZ = YOL / ZAMAN
Yol = 22m (sabit değer)
Zaman, aracın iki sensör arasından geçiş süresidir.
Örnek 1 :
Bir aracın 2 sensör arasındaki 22 m ‘lik mesafeyi 2 saniyede aldığını varsayalım…
Hız = Yol / Zaman
Hız = 22 / 2
Hız = 11 m/sn olarak bulunur.
Bu hız aracın saniyedeki hızıdır.
Aracın saatteki hızını bulmak istersek:
Saat saniyenin 3600 katıdır.
Buradan yola çıkarak…
11 x 3600 = 39600 aracın saatteki hızı metre olarak bulunmuş olur.
Sonuç olarak aracın saatteki hızı 39.6 Km/s tir.
Bu değer sistem için baraj değeridir. Bu hızın altında hızla seyreden araçlar kasis engeline maruz kalmadan ilerler.
Bu baraj değerinin üstünde olan araçlar kasisle karşılaşır.
Uygulama ve Sağlama 2
HIZ = YOL / ZAMAN
Yol = 22m (sabit değer)
Zaman, aracın iki sensör arasından geçiş süresidir.
Örnek 1 :
Bir aracın 2 sensör arasındaki 22 m ‘lik mesafeyi 3 saniyede aldığını varsayalım…
Hız = Yol / Zaman
Hız = 22 / 3
Hız = 7,3 m/sn olarak bulunur.
Bu hız aracın saniyedeki hızıdır.
Aracın saatteki hızını bulmak istersek:
Saat saniyenin 3600 katıdır.
Buradan yola çıkarak…
7,3 x 3600 = 26280 aracın saatteki hızı metre olarak bulunmuş olur.
Sonuç olarak aracın saatteki hızı 26 Km/s tir.
Bu aracın hızı baraj değerinden az olması nedeniyle yol üzerinde kasis ile karşılaşmayacaktır.

Uygulama ve Sağlama 3
HIZ = YOL / ZAMAN
Yol = 22m (sabit değer)
Zaman, aracın iki sensör arasından geçiş süresidir.
Örnek 1 :
Bir aracın 2 sensör arasındaki 22 m ‘lik mesafeyi 1,5 saniyede aldığını varsayalım…
Hız = Yol / Zaman
Hız = 22 / 1,5
Hız = 14,6 m/sn olarak bulunur.
Bu hız aracın saniyedeki hızıdır.
Aracın saatteki hızını bulmak istersek:
Saat saniyenin 3600 katıdır.
Buradan yola çıkarak…
14,6 x 3600 = 52560 aracın saatteki hızı metre olarak bulunmuş olur.
Sonuç olarak aracın saatteki hızı 53 Km/s tir.
Bu aracın hızı baraj değerinden fazla olması nedeniyle yol üzerinde kasis engeline maruz kalır.