Heterogeneous Software Integration for Intelligent Process Control

of 19
Transcript of Heterogeneous Software Integration for Intelligent Process Control
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
1/19
THE AUTONOMOUS SYSTEMS LABORATORY
Ricardo Sanz
Heterogeneous Software Integrationfor IPCThe HINT Project
ASLab v 0.0 Draft | 1998-08-13
Contents
1 Introduction: Intelligent Process Control 2
2 Heterogeneous Problems and Heterogeneous Solutions 3
2.1 Complex Process Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Heterogeneous Software Solutions . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 The Need for Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Life cycles for Intelligent Process Control 7
4 HINT Objectives 8
5 HINT Components and Technology 9
5.1 HINT Integration Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.2 HINT Integration Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.3 HINT Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6 HINT Demonstration 12
7 HINT Now and Tomorrow: DIXIT 14
8 Conclusions 15
9 Acknowledgments 16
1
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
2/19
10 References 16
1 Introduction: Intelligent Process Control
In complex continuous process plants there has been a traditional gap between controlrequirements and control capabilities of control systems. Conventional controllers wereunable to cope with all the problems that lead to bad operation of the plant. Dependabilityand safety were the main criteria that led to the use of humans to perform control tasks inthese systems.
The introduction of artificial intelligence [Boullart 92] was seen as a major step towardsplant autonomy, because of the potential capability of emulating high level human behav-ior. Expert systems were the tools mostly used to put intelligence in process controllers.
Intelligent process control is the subarea of automatic control that deals with the useof advanced computer technology to attack control problems in a process plant. This istraditionally related with complex process control and artificial intelligence (AI), but -forsure- a control system is more intelligent if it uses the best solution to a problem and notonly AI based solutions.
Our group has been involved in the development of control applications for complexprocesses for several years: cement, pharmaceutical, plastics, petroleum, chemical, etc.
The architectural complexity of the systems varied from simple expert systems runningon small computers controlling batch fermentation processes (SECOFE) to heterogeneous,multilayered, distributed applications controlling cement kilns (CONEX [Sanz 91]).
The activities in CONEX [Sanz 90] and the other systems gave rise to our participationin the HINT project (Heterogeneous INTegration architecture for intelligent control sys-tems). HINT was an ESPRIT project (#6447), partially funded by the Commission of theEuropean Communities, which has produced a coherent framework for integrating differ-ent techniques, in particular AI ones, in order to overcome the obstacles mentioned in theabove paragraphs and to provide solutions to process control problems which require thekind of intelligent supervision that is presently carried out by human operators.
The HINT Project tried to cope with a recurring problem in complex process control:the need of integration of heterogeneous software components in a complex process control system .These components are new or legacy components performing activities in restricted areas:covering partial domains, performing simple functions and using single technologies.
The results from the HINT Project were:
An integration methodology
An integration architecture
A set of problem solving components
In this paper we present an overview of the HINT project, explaining its objectives andanalysing the integration technology developed. First we will try to characterise the ap-plication domain of HINT. Next a life cycle for intelligent controllers is presented. HINTobjectives and technology are analysed afterwards. Finally a brief assessment and a viewof the immediate future is presented with some conclusions.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 2ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 2ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 2
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
3/19
Figure 1: sample intelligent process control application architecture (From [MITA 1994]). It shows the needof integrating heterogeneous control processors. Fuzzy, neural and expert in this case, with the added difficultyof learning.
2 Heterogeneous Problems and Heterogeneous Solutions
When trying to assess HINT for this paper -in relation with COSY- we found the followingstatement in the COSY web pages:
?In particular, the COSY Programme will have the goal to study tools which are capable ofanalysing control systems with the increased complexity and hybrid nature resulting from compat-ible, consistent use of combined heuristic, quantitative and qualitative information, together withexpert knowledge, in a supervised control system architecture?
As we will see, HINT objectives are strongly related with COSY objectives.
2.1 Complex Process Problems
In big, complex plants, there exist lots of operation and control problems. The origins ofthe problems are diverse, but the final issue is that conventional control technologies arenot capable to solve them.
The problems can span from the lower control levels (sensors and actuators) to thehigher ones (advanced controllers, reliability of models, human misoperations, etc.).
We are talking about problems, but in some cases, there are other type of tasks that arenot problems, but should be solved in order to get a better behaviour of the plant.
The complexity of the control of this plants is reflected in the structure of a complexprocess control system. Figure 2 shows a pyramidal view of complex process control. Theabstraction level increases when going upwards, at the same time that speed and -moreimportant- responsiveness decreases.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 3ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 3ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 3
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
4/19
Operational Layer
Strategical Layer
Tactical Layer
Advanced Control
Complex Loops
Single Loops
Sensors & Actuators
Management
Monitorization and Control
Plant Action
ActionPerception
Perception
Management Information System
Continuous Process Plant
Optimization
Plan Execution
Reactiveness
hours-days
UserInterface
1 sec
100 msec
10 msec
msec
Conventional
Control
secs-mins
mins-hours
Figure 2: Control layers in complex process control systems. Intelligent components are used in all the layersof the control pyramid. HINT problem solving components are targeted at reactive an tactical layers (Adapted
from [HINT 94]).
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 4ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 4ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 4
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
5/19
Conventional process control spans from layer one to layer four (sensors to advancedcontrol). Intelligent control is usually viewed as part of the upper layers, but, dependingon the technology, it can be used also in lower layers.
By example, we have been using fuzzy inference technology in the sensor layer to per-form sensor validation. This is possible because speed of our fuzzy inference engines andpredictability of the fuzzy validator makes possible its use in fast real-time layers.
The complex process control is so complex that, in most cases, human supervision mustbe done for all layers.
2.2 Heterogeneous Software Solutions
If you browse one volume of proceedings from an IEEE Intelligent Control Symposium orIFACs AIRTC, you will see lots of demonstrations of software solutions to complex plantproblems or tasks; but what you will not see is a clear map from problems to solutions. It
seems possible to use all the techniques in all the problems.For a hammer everything seems like a nail. For a neural networker every problem is
obviously better solved using a neural network.
In fact it is true that you can use whatever technique you want. At the end all you haveis the Pentium or SPARC instruction set to do things1.
The hammer-nail problem is so extended that we have found expert systems writtenin FORTRAN and conventional procedures implemented by means of rules and artificialstate variables using an expert system shell.
The software toolbox of the intelligent control systems engineer is big; it contains lotsof software technologies sometimes complementary and sometimes diametrically opposedone to other. There have been efforts to characterise pairs problem-solution in restricted ar-
eas (See by example [Leitch 93]) and even more globally [Alarcon 1995]. But in fact the finaltool chosen depends on the persons that will construct the solution more that it dependson the problem to be solved. This effort has been done even in HINT [Alarcon 93].
Sample Tasks Sample Software SolutionsProcess interfaces Conventional programmingSituation assessment Expert systemsDirect control Neural networksSimulation Fuzzy LogicDiagnosis Model based reasoningData validation Genetic algorithmsData visualization GUIsData estimation Databases
. . . and many more. . . . ad infinitum.
What is the solution ?. Perhaps what we need is a better assessment of the technologiesin relation with problems of a domain. We call it a domain-task-technology (DTT) theory.
1 From our point of view what is critical is not technology capability but personal capability. At the end, whenyou are running an intelligent control project, you have persons working towards the solution. The technicalknowledge of these persons is a good point to start searching for a solution. Sometimes it is best to use a notso suitable technology because you have personnel knowledgeable in technologies away from the most suitable.The problem in this case is for your contractor, not for you; because he will reach a not so suitable solution butyou will maximise your profit.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 5ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 5ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 5
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
6/19
Perhaps the bets way is to leave the developers the technological decision. Perhaps theydont select the best technology, but the will select the technology the are more confidentwith.
In any case, when confronting heterogeneous problems, we will end with a set of het-erogeneous technologies to solve them. If we use a DTT theory because the set of taskswill conform the set of technologies. If we dont use such a theory, the set of persons in theproject team will conform this set of software technologies based on technologies in whichthey are knowledgeable.
As an example, the following table shows part of a DTT theory developed as part of theHINT Methodology. We will se details of this table later, when referring to HINT Technol-ogy.
2.3 The Need for Integration
If we have a set of technologies, there appears a problem when building the intelligent con-troller. The application architecture for each technology, its data sources and products, thedata formats and abstraction levels, will produce a software engineer nightmare if tryingto design a single, compact application.
If using a shell to build this application we need something like a Swiss-army-knifeshell. Gensym is trying to do this with G2.
The other alternative is to employ several tools to build application components andintegrate them in a single application. The keyword is integration. This word is a typicalcandidate for the lots-of-uses/no-meaning syndrome. When we use this term we meanmakingseveral things work together. And, when referring to software applications it means makingseveral portions of code work together.
Software integration is what a linker does with program parts. But our problem is morecomplex, because the parts are built in different ways and the input/output mechanismsare not as simple as parameter passing in a programming language.
When trying to identify the integration needs and issues we will talk about:
Core Technologies
Integration Methodology
Integration Architectures
Core technologies specify the way components are built. Each technology opens a pathto specific code and data structures. By example, talking about expert systems -a core
technology- it is assumed that there will be a explicit representation of application depen-dent knowledge -the knowledge base- that will be used by an application independentcode -the inference engine.
Integration methodology specify how to perform the conceptual integration of the com-ponents.
Integration architecture is software design -or even implementation- to provide mecha-nism to translate the conceptual integration specified by the methodology into real, work-ing code.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 6ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 6ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 6
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
7/19
In HINT core technologies are technologies suitable for use in intelligent process con-trol applications. Some components based on these technologies were developed. Some asreusable packages (fuzzy, neural, user interface) some as demonstrator specific code (ex-
pert, simulation, data capture).The integration methodology is the HINT Methodology. The integration architecture
built to support the methodology was a blackboard based monohost architecture.
3 Life cycles for Intelligent Process Control
From the inner point of view, intelligent control systems design must begin with a care-ful operator task analysis and correct balance of responsibility. At the end humans areresponsible of the correct operation of the whole system, so they must be confident withthe automated activities of the control system. Success of advanced technologies in processcontrol should not be measured by the economy gains or the reliability enhancements but
by their operation time. The time that operators let them do their work.
Finding a right way to build intelligent process control systems is a no hope task be-cause of heterogeneity in process problems leads to a high degree of variety in applicationstructure. Some of the reasons for the complexity of the search of a life cycle are:
Use of artificial intelligence technologies, which are inherently unpredictable and un-planificable2.
Non determinist computational methods.
Knowledge based processing.
Knowledge extraction problems.
Knowledge representation problems.
Application structure dynamics.
Exploratory programming.
High level of novelty
Strong coupling between development phases: inherent feedback
Postponed specifications and designs
Complex non-hierarchical development teams
All these things lead to spiralled or prototype based development life cycles. But thereexist another problem and is the problem of technology heterogeneity and the need ofintegration.
This problem discovers a need for analysis of control problems and technology selectionthat must be done before any other work can start, because technologies selected will guidethe design of the integrated application. This is where a DTT theory is involved.
2 Despite the efforts put on formalising life cycles for knowledge based systems like KADS [Schreiber 93] andsimilars.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 7ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 7ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 7
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
8/19
Figure 3: A view of the intelligent process control life cycle.
In Figure 3 a way from a problem to a solution is depicted. We start at the left node, witha problem in a domain. And want to reach the lower node; a solution in that domain. Thehammer-nail way is straightforward; directly from problem to solution without botheringabout what is the best way to do that. The monotechnology, non integrated application isthe easiest solution.
We promote the other way round. We need a brief -or not so brief- stay in the twoother nodes: task and component. In task we analyse and decompose the problems inconceptually elemental tasks. In Component we select the technology or technologies thatoffer better solutions for this tasks.
The objective of HINT is to support this approach by means of providing mechanisms
-conceptual and software- to perform the integration of heterogeneous components
4 HINT Objectives
The objective of HINT was provide technology for the three top layers of the control pyra-mid. These technology should provide support for integration of heterogeneous compo-nents. This was achieved by means of blackboard structuring around task oriented objects:The Basic Control Processes (or BCPs for short).
The proposed pyramidal structure means:
1. The information available in each layer, as well as the control procedures present init, become progressively more complex as we ascend.
2. The BCPs represent control procedures instantiated according to the objectives ofeach layer. These procedures are, as well, progressively more complex.
3. The development procedure operates under the exhaustive elaboration of the lowerlevel layers and its installation and previous tests before taking into account thehigher layers.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 8ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 8ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 8
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
9/19
4. Each layer is conceptually independent of higher layers, and in their absence a mini-mum control functionality is assured by default.
5. The information flow (BCPs input) is from lower layers to higher layers. Higher lay-
ers are responsible for gathering information at the right moment. The responsibilityof the lower layers is to assure the availability of that information.
6. The flow of activities (BCPs output) is moderated by the deposition of information(tuning control loop parameters, for example) in accessible positions of the same orlower layers.
The HINT project finished by the end of 1994 with partial success. This success wasonly partial because:
The reusability of the code developed was not high. It is difficult to build a newapplication using HINT software.
The strategic layer was not demonstrated.
Distributed applications were not possible under HINT.
5 HINT Components and Technology
The main HINT components are: the HINT Integration Methodology, the HINT IntegrationArchitecture and the HINT Components
5.1 HINT Integration Methodology
The HINT integration methodology:
Defines when specific control problems are suitable to be solved by the cooperationof the different techniques.
Specifies the different phases to follow when integrating different AI based technolo-gies, namely the definition, analysis, knowledge acquisition, conceptualization anddesign phase.
Defines the vehicles means by which this integration can be carried out: The BCPs.
It is important to notice that the BCP structure is able to represent and support bothautomatic tasks already being performed in present control systems and those taking placein more intelligent layers.
BCPs can be classified as one of the following four types according to their intrinsicfeatures and objectives:
Preventive : aiming to avoid possible problems before they appear by manipulating thecorresponding variables or suggesting recommendations.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 9ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 9ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 9
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
10/19
Corrective : aiming to resolve undesirable situations once a problem is detected by per-forming or recommending appropriate actions.
Optimization : aiming to carry out enhancements which improve the process.
Modal : causes a change in the processes functioning, i.e., in the way that the operationteam or the higher level staff carry out the process, usually in response to orders fromhigher levels.
At present, these four types constitute all the possibilities from our point of view. Theycover all the functionalities that might be needed to govern a process. Consider: at anymoment, the process will be in a certain state and we might set three possible classifica-tions of the state, good, normal and bad. In the next moment the same classifications areapplicable, and we might postulate that the state transitions between these two instants areperformed by a BCP. The transition from a normal state to a good one will be realized viaan optimization BCP. A bad state passes to a normal one via a corrective BCP, and in orderto avoid a change from a normal state to a bad one, a preventive BCP will be fired. Noother transitions are to be feasible within one layer. These are then the functions of the op-timizing, corrective and preventive kinds of BCP. When an order or an action is performedin an upper layer, however, a BCP might be created in a lower layer as a result in order todo the bidding. The latter is the modal kind of BCP.
5.2 HINT Integration Architecture
The architecture for heterogeneous integration developed in HINT is based on the black-board concept [Engelmore 88]. The HINT blackboard is structured in three layers (opera-tional, tactical and strategical) according with the three conceptual layers proposed by the
methodology.
The contents of the blackboard are described using an specifically developed languagecalled the HINT blackboard Generation Language (GL) which describes the objects con-tained in each layer, its behaviour an the relations between objects in different layers. TheGL compiler compiles the GL file into C code that implements blackboard data and black-board manager procedures.
The main object contained in the blackboard are HINT BCPs. They are constructedusing the HINT generation language and based on the methodological design done forintegration of heterogeneous knowledge sources based on the components.
The knowledge sources access blackboard data using an interface library. The black-board supports dynamic creation of objects, but the methodology recommends not to use
it because of predictability penalties.
The structure of a BCP object is shown in Figure 4. It is composed of:
Start: the start point determines the activation of the BCP. It can be fired automati-cally or by a trigger condition (e.g. a changing of a variable) or by an order from ahigher level.
Control phase, including:
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 10ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 10ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 10
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
11/19
Start End
Control Phase Follow - Up
Detection
M11
Message
M12
Message
M2
Sugges
tion
M31
Ac
tions
Mon
itore
d
M32
Pre
dictions
M33
Reeva
lua
tion
A1
Ac
tion
Diagnosis Suggestions&
Actions
ActionsMonitoring
PredictiveReasoning
HypothesisReevaluation
andEnd Condition
Presentation Stress
Figure 4: Basic Control Process structure (From [HINT 1994]).
1. Detection: this may coincide with the start point, and usually depends on a condi-tion involving several variables. During the BCPs lifetime, this step can be initiatedseveral times.
2. Diagnosis: a diagnosis of the problem is provided.
3. Suggestions and Actions: according to detection and any diagnosis (if it exists), anaction is performed or a recommendation is generated (if the loop is not closed).
Presentation Stress: this determines the current priority, seriousness and state ofstress of the BCP, affecting its presentation on the user interface.
Follow-up phase, composed by:
1. Monitoring: the actions realized are detected and monitored, and the progress of theBCP and the evolution of the process are evaluated.
2. Prediction of the evolution of the BCP in order to determine whether to terminate theBCP or to continue.
3. Hypothesis re-evaluation and End conditions: the hypothesis (formed at the diag-nosis stage) is reviewed and the decision is taken whether or not to return to the
control phase (detection, diagnosis or action) or to go to the end step.
End: this terminates the BCP. It initiates terminal processing.
5.3 HINT Components
Five components were planned as demonstration. The technologies for these componentswere:
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 11ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 11ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 11
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
12/19
Neural networks
Fuzzy logic
Expert systems
Model based reasoning
Graphical user interfaces
All they were shown in the demonstrator performing some tasks: assessment, valida-tion, prediction, diagnosis.
Some of the components that make up the HINT demonstrator can be customized inorder to develop a new application. The HINT customization toolkit -or HINT Toolkit-provides the system developer with an integrated environment in which the customiza-tion and the test of the HINT system can be carried out. It allows the customization of the
individual modules of the HINT application but also provides common features to coordi-nate the development and to test the applications. By means of this HINT Toolkit a systemdeveloper can customize a HINT application straightforwardly. The system developer isguided by means of a system developers manual -including the integration methodology-which describes the complete development process - from knowledge acquisition to theactual implementation by means of the HINT Toolkit.
The reusability of the demonstrator components were quite variable. The operator as-sessment expert system and neural netrok predictor were built for demonstration exclu-sively, but the fuzzy module provided a tool for building general fuzzy processors. Thespecific component part for the demonstrator was a knowledge base file. The rest (knowl-edge base editor and fuzzy knowledge source engine) were totally reusable. Usability -notreusability- of the model based reasoner was low even in HINT.
The user interface builder was a very reusable and effective tool for building user inter-faces based on a HINT blackboard.
6 HINT Demonstration
It is very important to note that, as part of the HINT project, a demonstrator has beenimplemented and installed in a petrochemical plant owned by Repsol S.A (one of the majorSpanish firms and a member of the HINT consortium) in Cartagena, Spain, in order to besure of the suitability of the approach. This demonstrator is currently being used by thecontrol team of the plant and it is already showing very promising results.
Several AI based modules have been developed in this demonstrator as an exampleof the various techniques that can be used in a HINT-like application, where the wholedevelopment -architecture, methodology and components- is oriented towards integratedman-machine systems.
The HINT methodology provides a good way to achieve proper balancing between manand machine: the maquette approach to development. It is a type of rapid prototyping, butwhat provides the prototype is mostly look and feel and some little functionality. Themaquette is developed in parallel with the real final system -with reduced effort providingearly feedback to get a better integration with plant systems and operators.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 12ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 12ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 12
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
13/19
Figure 5: A component customization tool: the Fuzzy Logic Shell. This tool is used to edit fuzzy knowledgebases used by the run time fuzzy knowledge source.
From FL
From PI
From ES
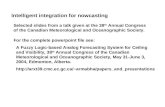
Figure 6: Sample screen from Repsol Cartagena demonstrator. It shows and advanced energy view of thefiltering process section. It includes data from several knowledge sources.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 13ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 13ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 13
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
14/19
A big effort was put in the integration of human operators in the control system thiswas the main objective of the demonstrator. The components used were:
A decision support system was the main component of the demonstration application(based on expert system technology).
An advanced user interface based on abstract views of the plant were developed.
A raw data validation and estimation system was done using fuzzy logic technology.
A neural network based predictor was used to reason about future behaviour of theplant.
A model based reasoner performed limited diagnosis of some subsystems.
7 HINT Now and Tomorrow: DIXIT
The architecture was a fairly simple monohost blackboard. In it a centralized and activedata structure (the blackboard) is the only means of communication among problem solv-ing modules. It is also the vehicle for cooperative problem solving and it is responsiblefor data coherence within the whole system. The interaction between knowledge sourcesand the blackboard is done using shared memory. It provides maximum speed but limitsdistributability.
From a first point of view we can say that HINT technology was -at least- immature,and that the HINT Product was unclear and barely useful. If we try to build -today- anapplication using HINT software we need a lot of information that is not really available.The HINT Developers Manual says quite a few about the real structure and use of thesoftware.
As a basic objective of DIXIT, reusability must be reached, and it must start from HINTtechnology reuse. So the first work is the analysis of HINT products in order to get areusability perspective of them.
Another drawback of HINT is that id did not demonstrate the use of a strategical layer.This layer is mainly comprised by its global objectives. These global and strategic objectivesof a plant can be divided into the following categories:
Continuity: the objectives define criteria which assure the overall continuity of theproduction process, as well as best alternative options.
Maintenance: this includes objectives which evaluate operations that generate wearwith the aim of reducing it, and the detection of possible problems (in the process) asa consequence of maintenance operations.
Production: these objectives govern the net quantity of product obtained, using nu-merical measures.
Quality: this class defines and establishes both internal and external criteria for qual-ity and sets goals related to contractual constraints and sales requirements.
Efficiency: these objectives relate to the analysis of production costs. Structural andstaff costs are not considered.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 14ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 14ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 14
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
15/19
Safety: these objectives touch on all safety criteria affecting the integrity of equipmentand components, the industrial installation, the plant staff, and third parties.
The problem is how to represent these objectives, how to provide reasoners on them andhow to integrate them in the multilayer structure of the advanced control system.
These three points (reusability, distributability and strategy) are the main targets of thenew ESPRIT project DIXIT.
8 Conclusions
The main results of the project can be summarised in a methodology, an architecture and
some problem-solving software components. The components developed were based onartificial intelligence technologies and were situated in the full spectrum of automationlayers.
The development of an integration methodology was the main point in HINT. This de-velopment was aimed at facilitating and guaranteeing the coherent interaction betweenmultiple heterogeneous techniques in the task of solving industrial control problems. Thisintegration methodology (i) Defines when specific control problems are suitable to be solvedby the co-operation of the different techniques, (ii) specifies the different phases to followwhen integrating different AI based technologies and (iii) defines the vehicles means bywhich this integration can be carried out.
The main concepts that appear behind the HINT architecture are the blackboard as an
architectural schema and the concept of multilevel blackboard. We must change this twoconcepts in order to give them a wider meaning, fundamentally due to the system trans-formation from a centralized backboard to a distributed system.
In the HINT architecture the higher part of the work was performed sequentially: onlythe modules having enough information were able to access common blackboard data. Therest of the knowledge sources expect patiently their turn to modify or read the backboardinformation.
The main concept: the HINT backboard, continues being valid, given it is the moreflexible mechanism for interchanging information between components that use differentsoftware technologies, such us neural networks, fuzzy logic, expert systems, model basedreasoning, etc.
In spite of the valid HINT blackboard schema, it is clear that for the distributed appli-cation development, it must be complemented with an agent oriented system. In a black-board system, the knowledge bases must accomplish all their communications using theblackboard. In a mixed system, usually the most of the transactions flow through the back-board but other kind of communications are allowed. Now the knowledge bases are calledagents and the direct communication between agents are supported by the system.
The concept of a leveled control hierarchy continues been perfectly valid. This hierarchyreflect a clear reality in manufacturing plants. The control is made in different levels ofincreasing speed and decreasing intelligence as we go up to the higher levels.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 15ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 15ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 15
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
16/19
9 Acknowledgments
We would like to acknowledge the funding from the Commission of the European Union
through ESPRIT Project 6447 HINT.
10 References
[Alarcon 93] A Conceptual Framework for the Integration in Intelligent Control Systems.Alarcon, I., Zaccagnini, J.L., Rodriguez, P., and de Pablo, E.; Proceedings of the IRTICSworkshop, pp. 05/1-05/15, Madrid 1993.
[Alarcon 94] Heterogeneous Integration Architecture for Intelligent Control. Alarcon,M.I., Rodrguez, P., Almeida, L.B., Sanz, R., Fontaine, L., Gomez, P., Alaman, X., Nordin, P.,Bejder, H. and de Pablo, E.; Intelligent Systems Engineering, Autumn 1994.
[Alarcon 95] Modelo para Analsis y Conceptualizacion de Sistemas Inteligentes para el Controlde Procesos Industriales en Tiempo Real. I. Alarcon. PhD Thesis. Universidad Politecnica deMadrid. 1995.
[Bhansali 94] Software Syntesis using Generic Architectures. Bhansali, S. AutomatedSoftware Engineering, Vol. 1 No. 3/4, pp. 239-279, 1994.
[Boullart 92] Application of Artificial Intelligence in Process Control. Boullart, L., Krijsman,A. and Vingerhoeds, R.A. (Eds) Pergamon, 1992.
[Camarinha-Matos 95] Balanced Automation Systems. Architectures and Design Methods.L. M. Camarinha-Matos and H. Afsarmanesh. Chapman & hall. 1995.
[Dague 91] A Conflict Recognition Engine for Model-based Diagnosis of Continuous
Dynamic Physical Systems, Dague, P., Deves, P., Jehl, O., Luciani, P., Tallibert, P.; 8th. Na-tional Conference on Artificial Intelligence, (2nd AAAI Workshop on Model Based Reason-ing), Boston (U.S.A.), July, 1990.
[David 93] Second Generation Expert Systems. David, J.M., Krivine, J.P. and Simmons, R.(Eds) Springer-Verlag, 1993.
[De Grace 92] The Olduvai Imperative. De Grace, P. and Stahl, L.H. Prentice-Hall, 1992.
[de Pablo 92] Integrating Multiple Technologies in Real-Time Intelligent Systems. dePablo, E., Rodriguez, P., Alarcon, I., Alaman X.; ECAI92 Workshop on Advances in Real-TimeExpert System Technologies, Vienna, 4 August 1992.
[Efstathiou 92] Architectures and Techniques of Artificial Intelligence in Process Con-trol. Efstathiou, J.; 1992 IFIP/IFAC/IMACS Intl. Symp. on AI for Real-Time Control, pp. 479-484, Delft, Netherland, June 1992.
[Engelmore 88] Blackboard Systems. Engelmore, R. and Morgan, T. (Eds) Addison Wes-ley, 1988.
[Fischer 94] Domain-Oriented Design Environments. Fischer, G. Automated SoftwareEngineering, Vol. 1 No. 2, pp. 177-203, 1994.
[HINT 94] HINT Manual for System Developers. HINT Consortium, 1994.
[Jagannathan 89] Blackboard Architectures and Applications. Jagannathan, V., Dodhiwala,
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 16ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 16ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 16
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
17/19
R., Baum, L.S.; Academic Press, New York.
[Jimenez 92] Aplicaciones de Fuzzy Logic en Tiempo Real, Jimenez, A., Mata, F.; LaInteligencia Artificial y el Control en Tiempo Real, pp. 189-240, Repsol- UIMP 1992.
[Kosko 92] Neural Networks and Fuzzy Systems. Kosko, B.; Prentice-Hall, New York1992.
[Leitch 93] Engineering Diagnosis: Matching Problems to Solutions. Leitch, R.; Tooldiag93, Toulouse, April 93.
[Leonard 92] Using Radial Basis Functions to Approximate a Function and Its ErrorsBounds. Leonard, J.A., Kramer, M.A., Ungar, L.H.; IEEE Transcations on Neural Networks,Vol. 3, No. 4, July 1992.
[Martnez 93] Expert System Interfacing with Distributed Control Systems. G.Martnez,A.Jimenez, R.Sanz and R.Galan. 1993 International Fuzzy Systems and Intelligent Control Con-ference, Louisville, Kentucky, USA, March 1993.
[Mata 92] Real Time Software Structure for Medium Level Control of Processes: AnApproach to the CONEX Direct Control. F.Mata, R.Sanz, A. Jimenez, R.Galan. SICICA 92,Malaga, Spain, May 1992.
[Mata 93] Fuzzy Logic for Sensor Validation: The FFV Tool. F.Mata, R.Sanz, A.Jimenezand J.P. Oria. IRTICS93 Workshop on Integration in Real Tiem Intelligent Control Systems.Madrid, 1993.
[Mata 94] Diseno y Construccion de Sistemas de Control Borroso. Fernando Mata. Ph.D.Thesis. Politechnical University of Madrid. 1994.
[MITA 94] Metodologia de Integracion y Tecnologas Avanzadas de Control Inteligente de Pro-cesos. MITA Project Proposal. UPM-DISAM 1994.
[Narendra 90] Identification and Control of Dynamical Systems Using Neural Net-works. Narendra. K. S., and K. Parthasarathy; IEEE Transactions on Neural Networks, Vol. 1,No. 1, March 1990.
[Rosemberg 94] Design issues in CSCW. Rosemberg, D. and Hutchinson, C. (Eds). Springer-Verlag, 1994.
[Sanz 90] Arquitectura de Control Inteligente de Procesos. R. Sanz. PhD Thesis. Politechni-cal University of Madrid. 1990.
[Sanz 91] CONEX: A Distributed Architecture for Intelligent Process Control. R.Sanz,A.Jimenez, R.Galan. World Congress on Expert Systems, Orlando, U.S.A. December 1991.
[Sanz 91] Intelligent Distributed Process Control. R.Sanz, A.Jimenez, R.Galan, F.Mata,E.A.Puente. P.D.COM 91, Corfu, Greece. June 1991.
[Sanz 91] Intelligent Process Control: The CONEX Architecture. R.Sanz, A.Jimenez,R.Galan, F.Mata and E.A.Puente. In Engineering Systems with Intelligence. S. Tzafestas (Ed.).Kluwer Academic Publishers, 1991.
[Sanz 94] Computational Intelligence in Process Control. R.Sanz, R.Galan, A.Jimenez,F.Mata, J.Velasco and G.Martnez. ICNN94, IEEE International Conference in Neural Net-works. Orlando, USA, 1994.
[Sanz 96] Integration of Fuzzy Technology in Complex Process Control Systems. R.Sanz,
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 17ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 17ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 17
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
18/19
F.Mata, R.Galan and A. Jimenez. FLAMOC96. Sydney, Australia, 1996.
[Schreiber 93] KADS A Principled Approach to Knowledge-based System Development. G.Schreiber, B. Wielenga and J. Breuker (eds.); Academic press (1.993).
[Sheridan 83] Adapting Automation to Man Culture and Society. T.B. Sheridan, T.Vamos and S. Aida. Automatica, Vol. 19 No. 6, pp 605-612, 1983.
[Shneiderman 87] Designing the User Interface: Strategies for Effective Human-ComputerInteraction. B. Shneiderman; Addison-Wesley, 1.987.
[White 92] Handbook of Intelligent Control. D.A.White and D.A.Sofge. Van NostrandReinhold. 1992
[Wilkens et al. 93] Formentor: A Real-Time Expert System For Risk Prevention InComplex Hazardous Environments. A case study. Wilkens, M., Nordvik, J.P. and Poucet,A.; Proceedings of the IRTICS workshop. Madrid 1993.
[Wooldridge 95] Intelligent Agents. M.J. Wooldridge and N.R.Jennings. Springer Verlag
1995.
[Yager 87] Fuzzy Sets and Applications: Selected papers by L.A. .Zadeh. Yager, R.R., Ovchin-nikov, S., Tong, R.M., and Nguyen, H.T.; Wiley Interscience, 1987.
ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 18ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 18ASLab.org / Heterogeneous Software Integration for IPC / v 0.0 Draft 18
-
7/28/2019 Heterogeneous Software Integration for Intelligent Process Control
19/19
Title Heterogeneous Software Integration for IPCSubtitle The HINT ProjectAuthor Ricardo Sanz
Date 1998-08-13Reference v 0.0 Draft
URL
(C) THE AUTONOMOUS SYSTEMS LABORATORY