BACnet Integration Guide for for LGR, ME-LGR, ME812u-LGR-BETA
Upload
luis-carlos-garciaCategory
view
46download
0
Instituto Tecnológico de Celaya
2013
Lugar Geométrico de las
Raíces Instrumentación Virtual usando LabView
Hernández Calderón Héctor Alonso
e-mail: [email protected]

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 2 de 28
Resumen
En este documento se presenta el desarrollo para gráficar el lugar geometrico de las raíces de algunas funciones de transferencia de sistemas de control, usando LabView y también de manera analítica.
Palabras Clave: Asíntotas, Graficación, LabView, LGR, Simetría, Ramas.
I. Introducción
El lugar geométrico de las raíces es una poderosa herramienta para el análisis y diseño de sistemas de control. Nos da información cualitativa y cuantitativa acerca de la estabilidad y respuesta transitoria de sistemas de control realimentados. También nos permite hallar los polos del sistema en lazo cerrado comenzando desde los polos y ceros en lazo abierto.
II. Desarrollo y resultados Ejercicio 1 El primer lugar geométrico de las raíces que deseamos trazar es como el que se muestra en la figura 1.
Figura 1. LGR con tres polos reales.
De la figura anterior podemos observar que se tienen tres polos sobre el eje real (σ), de los cuales podemos ubicar dos de ellos al azar o con ayuda del VI que se mostrará en la sección de simulación; para el tercer polo es fácil definir su ubicación y puede notarse que se encuentra en el origen. La función de transferencia en lazo abierto para éste primer sistema es:
Para definir la trayectoria que siguen los polos que tienden hacia el infinito calcularemos las asíntotas correspondientes mediante:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 3 de 28
∑ ∑
donde k = De la función de transferencia podemos determinar por inspección que no hay “ceros” y los “polos” son tres: s1 = 0, s2 = -1 y s3 = -2. Por lo tanto, el punto de partida para las asíntotas sobre el eje real es:
Ahora en los ángulos que definen la orientación de las asíntotas son:
El paso siguiente es calcular el punto donde los polos parten del eje real ( ) también llamado punto silla de salida para seguir su trayectoria hacía el infinito. Para ello igualamos la función de transferencia con -1, despejamos k, derivaremos con respecto a “s”, igualamos con cero y obtenemos las raíces del polinomio que nos resulta:
,
El valor de la raíz que se toma en cuenta para este caso es s2, ya que éste debe ser menor o igual que el punto donde parten las asíntotas que es igual a: -1.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 4 de 28
Lo que nos resta para calcular para éste ejemplo son los cruces con el eje imaginario que tiene la trayectoria de los polos en lazo cerrado. Para ello debemos obtener función de transferencia en lazo cerrado y aplicar el criterio de Rout-Hurwitz.
s3 1 2
s2 3 k
s1 (6-k)/3 0
s0 k 0
De la tabla anterior podemos calcular el valor de “k” para el cual nuestro sistema se vuelve marginalmente estable, éste debe sustituirse en el polinomio del denominador de nuestra función de transferencia en lazo cerrado.
,
Los cruces con el eje real no tienen parte real, así que estos valores corresponden a las raíces . Nota: El número de ramas es igual al grado mayor del polinomio del denominador de nuestra función de transferencia en lazo abierto.
Ejercicio 2 El siguiente ejercicio se hará de manera similar, siguiendo los pasos del ejemplo anterior de manera resumida. El LGR que deseamos trazar ahora es el que se muestra en la figura 2.
Figura 2. LGR con dos polos complejos y uno real.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 5 de 28
La función de transferencia en lazo abierto para el sistema es:
Ramas: 3
Asíntotas:
Punto silla de salida
Cruces con el eje
s3 1 5
s2 24 20+k
s1 (100-k)/5 0
s0 20+k 0

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 6 de 28
,
El paso adicional para este ejemplo es calcular los ángulos de salida para los polos complejos, se utilizará la siguiente fórmula:
∑ ∑
De la fórmula anterior, para calcular los ángulos de ceros y ángulos de polos, éstos de obtienen por trigonometría. En éste caso como no se tienen ceros solo se calcularan los ángulos de polos y éstos a su vez serán sustituidos en la fórmula anterior.
Nota: Si se tuvieran ceros complejos, se calcularían ángulos de entrada de forma similar con la fórmula:
∑ ∑
Ejercicio 3 El LGR que deseamos trazar ahora es el que se muestra en la figura 3.
Figura 3. LGR con dos polos complejos y dos reales.
La función de transferencia en lazo abierto para el sistema es:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 7 de 28
Ramas: 4
Asíntotas:
Punto silla de salida
Cruces con el eje

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 8 de 28
s4 1 6 k
s3 4 4 0
s2 5 k 0
s1 (20-4k)/5 0 0
s0 k 0 0
,
Ángulos de salida
Ejercicio 4 El LGR que deseamos trazar ahora es el que se muestra en la figura 4.
Figura 4. LGR con 4 polos complejos.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 4

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 9 de 28
Asíntotas:
Punto silla de salida
,
Cruces con el eje
s4 1 6.5 5+k
s3 3 7 0
s2 25/6 5+k 0
s1 (85-18k)/25 0 0
s0 5+k 0 0

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 10 de 28
,
Ángulos de salida
Ejercicio 5 El LGR que deseamos trazar ahora es el que se muestra en la figura 5.
Figura 5. LGR con dos polos complejos y dos reales.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 4
Asíntotas:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 11 de 28
Punto silla de salida
,
Cruces con el eje
s4 1 5 k
s3 5 6 0
s2 34/5 k 0
s1 (204-25k)/34 0 0
s0 k 0 0
,
Ángulos de salida

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 12 de 28
Ejercicio 6 El LGR que deseamos trazar ahora es el que se muestra en la figura 6.
Figura 6. LGR con dos polos complejos y tres reales.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 5
Asíntotas:
Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 13 de 28
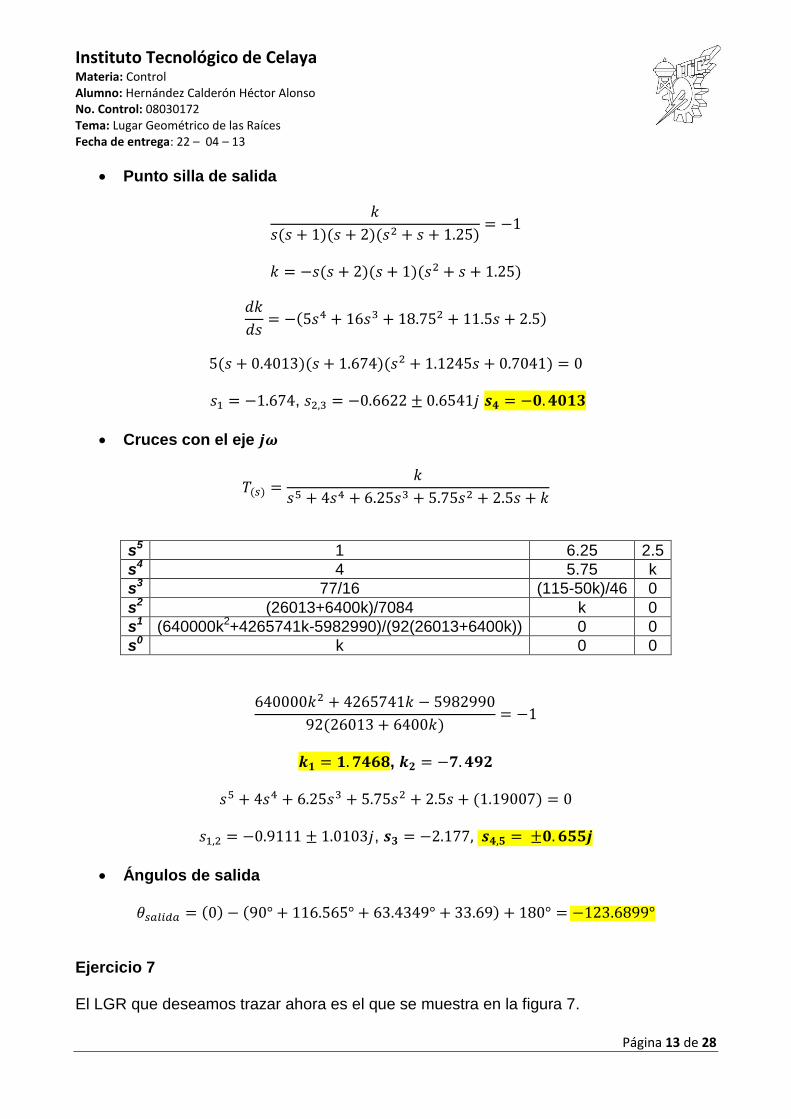
Punto silla de salida
,
Cruces con el eje
s5 1 6.25 2.5
s4 4 5.75 k
s3 77/16 (115-50k)/46 0
s2 (26013+6400k)/7084 k 0
s1 (640000k2+4265741k-5982990)/(92(26013+6400k)) 0 0
s0 k 0 0
,
,
Ángulos de salida
Ejercicio 7 El LGR que deseamos trazar ahora es el que se muestra en la figura 7.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 14 de 28
Figura 7. LGR con dos polos complejos y un cero real.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 2
Asíntotas:
Punto silla de salida
,

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 15 de 28
Cruces con el eje En la figura 7 se alcanza a apreciar que el lugar geométrico de las raíces no tiene cruces
con el eje .
Ángulos de salida
Ejercicio 8 El LGR que deseamos trazar ahora es el que se muestra en la figura 8.
Figura 8. LGR con un cero real, dos polos complejos y uno real.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 3
Asíntotas:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 16 de 28
Punto silla de salida
,
Las raíces del polinomio anterior no concuerdan con ningún punto silla de salida, esto puede observarse desde la figura 8.
Cruces con el eje El lugar geométrico de las raíces no tiene cruce alguno como puede observarse en la figura 8.
Ángulos de salida
Ejercicio 9 El LGR que deseamos trazar ahora es el que se muestra en la figura 9.
Figura 9. LGR con un cero real, dos polos complejos y dos reales.
La función de transferencia en lazo abierto para el sistema es:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 17 de 28
Ramas: 4
Asíntotas:
Punto silla de salida y punto silla de entrada
,
Como puede observarse en la figura 9 dos de sus ramas forman un circulo, por lo que se
tiene un punto silla de salida en y un punto silla de entrada en
Cruces con el eje
s4 1 14 3k

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 18 de 28
s3 4 20+k 0
s2 36-k/4 3k 0
s1 (k2+32k-720)/(k-36) 0 0
s0 3k 0 0
,
Ángulos de salida
Ejercicio 10 El LGR que deseamos trazar ahora es el que se muestra en la figura 10.
Figura 10. LGR con un cero real y cuatro polos complejos.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 4
Asíntotas:

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 19 de 28
Punto silla de salida
,
Cruces con el eje
s4 1 27 50+2k
s3 8 50+k 0
s2 166-k/8 50+2k 0
s1 (k2+12k-5100)/(k-166) 0 0
s0 50+2k 0 0

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 20 de 28
,
Ángulos de salida
Ejercicio 11 El LGR que deseamos trazar ahora es el que se muestra en la figura 11.
Figura 11. LGR con dos ceros complejos y tres polos reales.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 3
Asíntotas:
Punto silla de salida
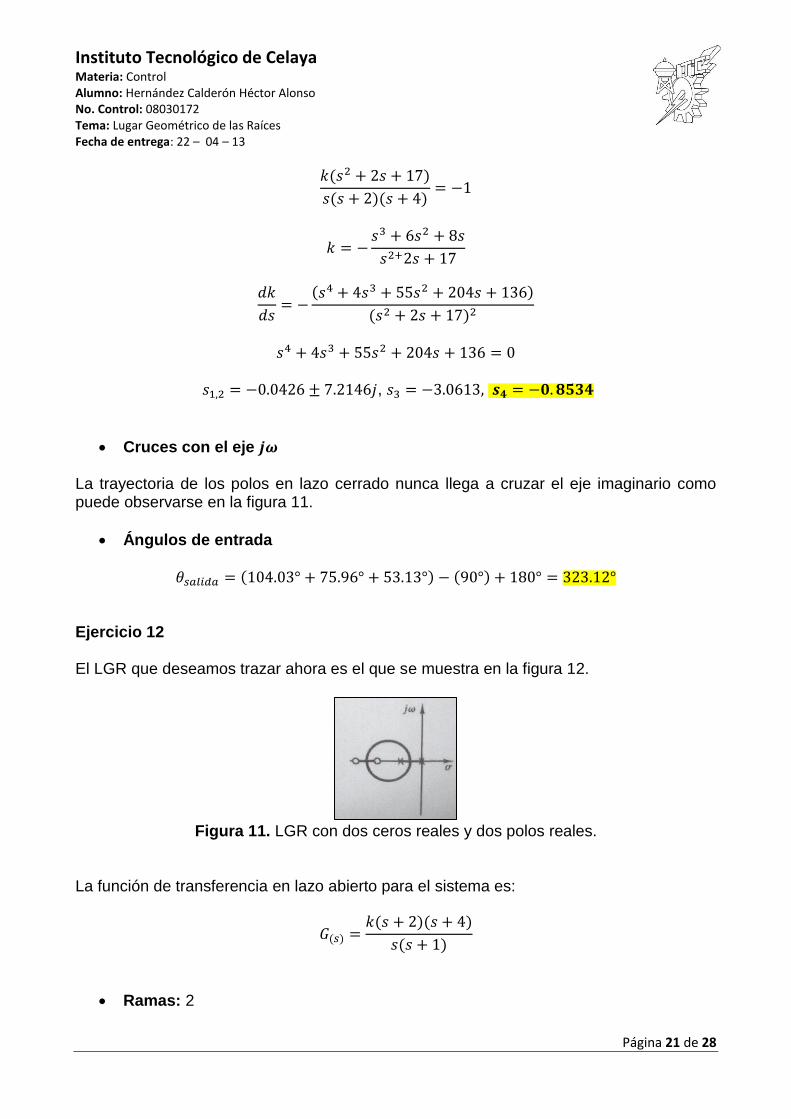
Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 21 de 28
,
Cruces con el eje La trayectoria de los polos en lazo cerrado nunca llega a cruzar el eje imaginario como puede observarse en la figura 11.
Ángulos de entrada
Ejercicio 12 El LGR que deseamos trazar ahora es el que se muestra en la figura 12.
Figura 11. LGR con dos ceros reales y dos polos reales.
La función de transferencia en lazo abierto para el sistema es:
Ramas: 2

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 22 de 28
Asíntotas:
Para este caso no se tienen asíntotas ya que se tienen el mismo número de polos como de ceros, lo que nos dice que los polos se dirigen hacia los ceros
Punto silla de salida y punto silla de entrada
y
Cruces con el eje La trayectoria de los polos en lazo cerrado nunca llega a cruzar el eje imaginario como puede observarse en la figura 12.
Ángulos de entrada
No es necesario calcular ángulos de salida o entrada ya que no se tienen ceros complejos o polos complejos.
III. Simulación
Para comprobar los resultados que se obtuvieron anal´ticamente para el trazado LGR de los ejercicios, se realizó un instrimento virtual como el que se muestra en las figuras 13 y 14.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 23 de 28
Figura 13. Panel frontal del instrumento virtual.
En la parte superior izquierda se tienen controles numéricos para ingresar los valores de los ceros y polos del sistema en lazo abierto y la ganancia del mismo. En la parte inferior izquierda se tienen indicadores numéricos, donde se muestran los coeficinetes del numerador y denominador de la función de transferencia. En la parte central se tiene el recuadro blanco donde se grafica el LGR. Por último se tienen indicadores donde se proporciona la ubicación de polos y ceros en lazo cerrado, lazo abierto y puntos silla de salida.
Figura 14. Driagrama a bloques del VI.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 24 de 28
A continuación se mostrarán los trazos del LGR de cada uno de los ejercicios obtenidos en LabView. Ver figuras 15 a 26.
Figura 15. LGR del ejercicio 1.
Figura 16. LGR del ejercicio 2.
Figura 17. LGR del ejercicio 3.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 25 de 28
Figura 18. LGR del ejercicio 4.
Figura 19. LGR del ejercicio 5.
Figura 20. LGR del ejercicio 6.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 26 de 28
Figura 21. LGR del ejercicio 7.
Figura 22. LGR del ejercicio 8.
Figura 23. LGR del ejercicio 9.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 27 de 28
Figura 24. LGR del ejercicio 10.
Figura 25. LGR del ejercicio 11.
Figura 26. LGR del ejercicio 12.

Instituto Tecnológico de Celaya Materia: Control Alumno: Hernández Calderón Héctor Alonso No. Control: 08030172 Tema: Lugar Geométrico de las Raíces Fecha de entrega: 22 – 04 – 13
Página 28 de 28
Con cada una de las imágenes anteriores podemos comprobar los resultados obtenidos de manera analítica.
IV. Conclusión
Como ya se mencionó en un principio el LGR es una poderosa herramienta para el análisis y diseño de sistemas de control, del cual obtenemos suficiente información para predecir el comportamiento de cualquier sistema. En algunas ocasiones no es suficiente realizar el trazado del LGR de manera analítica ya que para sistemas complejos resulta complicado realizar esta tarea, por lo que es recomendable utilizar algún software de simulación como lo es LabView o MatLab.
V. Referencias
[1] Sistemas de control para la ingeniería, Norman S. Nise, Editorial Patria. 4ta edición en español.