GPS Attitude Determination Under Antenna Array Geometry Deformation Alexander Kozlov, Alexey...
13
GPS Attitude Determination Under Antenna Array Geometry Deformation Alexander Kozlov , Alexey Nikulin, Andrei Golovan, Ali Cepe, Vladimir Chemodanov RAST 2015 Moscow State University, Russia Navigation and Control lab.
-
Upload
suzan-riley -
Category
Documents
-
view
220 -
download
0
Transcript of GPS Attitude Determination Under Antenna Array Geometry Deformation Alexander Kozlov, Alexey...

GPS Attitude Determination Under Antenna Array Geometry Deformation
Alexander Kozlov,
Alexey Nikulin, Andrei Golovan, Ali Cepe, Vladimir Chemodanov
RAST 2015Moscow State University, RussiaNavigation and Control lab.

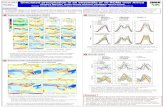
Attitude determination using GPS

Attitude determination accuracy

Antenna array deformations undeforme
d state, no rotation
observable deformation
ambiguous deformation

Antenna array deformation types
Single baseline/multiple baselines are deformed
Constant/varying deformations
Stochastic/determined deformation model
Coordinated/arbitrary deformations (multiple baselines)

Math behind the scene Baseline deformations
S defines which directions are allowed for deformations
If no inertial measurement unit (IMU) is present, the quantitive effect of deformation on attitude determination is fully defined by S and antenna array geometry
If IMU measurements are available, the effect depends on S, and antenna array geometry, and gyro measurement quality and satellite motion

No IMU, 2 antennas

No IMU, 3 antennas

No IMU, 4+ antennas

GPS/IMU data fusion, 2 antennas

GPS/IMU data fusion, 3 antennas

GPS/IMU data fusion, 4 antennas

Summary Antenna array geometry deformations can be
observable or ambiguous in terms of attitude determination
If observable, without IMU geometry of antenna array and geometry of deformation both define the accuracy of attitude determination
IMU measurements allow some antenna array geometry deformations to become observable
With IMU, satellite motion is also significant