
GPS Ancash Blas Diapositivas
21
{ BIOINFORMATICA “DISEÑO DE UN SISTEMA DE POSICIONAMIENTO GLOBAL (GPS) EN ANCASH, USANDO TECNOLOGIA JAVA” Alumnos: López Torres Kevin Blas Azaña Andrei Profesora: Ing. Briones Pereyra Lizbeth Dora
-
Upload
andrei-blas-azana -
Category
Documents
-
view
26 -
download
0
Transcript of GPS Ancash Blas Diapositivas

{
BIOINFORMATICA
“DISEÑO DE UN SISTEMA DE POSICIONAMIENTO GLOBAL (GPS) EN ANCASH, USANDO TECNOLOGIA JAVA”
Alumnos: López Torres Kevin Blas Azaña Andrei
Profesora: Ing. Briones Pereyra Lizbeth Dora

GPS: Antecedentes históricos:
El lanzamiento del satélite espacial estadounidense Vanguard en 1959 puso de manifiesto que la transmisión de señales de radio desde el espacio podría servir para orientarnos y situarnos en la superficie terrestre o, a la inversa, localizar un punto cualquiera en la Tierra. Los sistemas anteriores de posicionamiento que empleaban estaciones terrestres de A.M. (Amplitud Modulada) cubrían un área mayor que los de UHF (Frecuencias ultracortas), pero no podían determinar con exactitud una posición debido a las interferencias atmosféricas que afectan a las señales de radio de amplitud modulada y a la propia curvatura de la Tierra que desvía las ondas
Por tanto, la única forma de solucionar este problema era colocando transmisores de radio en el espacio cósmico que emitieran constantemente señales codificadas en dirección a la Tierra. De hecho esas señales cubrirían un área mucho mayor que las de A.M., sin introducir muchas interferencias en su recorrido.
Sin embargo, no fue hasta 1993 que el Departamento de Defensa de los Estados Unidos de América, basado en la experiencia recogida del satélite Vanguard (en un principio para uso exclusivamente militar) puso en funcionamiento un sistema de localización por satélite conocido por las siglas en inglés GPS(Global Positioning System – Sistema de Posicionamiento Global).

En sus inicios el propio Departamento de Defensa programó errores de cálculo codificados en las transmisiones de los satélites GPS para limitarlo solamente a la actividad militar que sí contaba con decodificadores para interpretar correctamente las señales, pero a partir de mayo de 2000 esta práctica quedó cancelada y hoy en día el sistema GPS se utiliza ampliamente en muchas actividades de la vida civil, aunque no está exento de ser reprogramado de nuevo en caso de cualquier conflicto bélico.
Este sistema permite conocer la posición y la altura a la nos encontramos situados en cualquier punto de la Tierra en todo momento, ya sea que estemos situados en un punto fijo sin desplazarnos, e incluso en movimiento, tanto de día como de noche.
El sistema GPS permite rastrear también, en tiempo real, la ubicación de una persona, animal, vehículo, etc., desde cualquier sitio y prestar auxilio si fuera necesario, con la condición que estén equipados con un dispositivo que pueda emitir algún tipo de señal, ya sea de radio o telefónica, que permita su localización.
La primera prueba exitosa del sistema GPS desde el punto de vista práctico como instrumento de ayuda a la navegación, la realizó el trasbordador espacial Discovery en el propio año que se puso en funcionamiento el sistema. Actualmente los satélites GPS pertenecen a una segunda generación denominada Block II

Características técnicas y prestaciones.
El Sistema de Posicionamiento Global (GPS) lo componen: Sistema de satélites: Está formado por 24 unidades con trayectorias sincronizadas
para cubrir toda la superficie del globo terráqueo. Más concretamente, repartidos en 6 planos orbitales de 4 satélites cada uno. La energía eléctrica que requieren para su funcionamiento la adquieren a partir de dos paneles compuestos de celdas solares adosados a sus costados.
Estaciones terrestres: Envían información de control a los satélites para controlar las órbitas y realizar el mantenimiento de toda la constelación.
Terminales receptores: Indican la posición en la que están, conocidas también como Unidades GPS.

Evolución del sistema GPS
El GPS está evolucionando hacia un sistema más sólido (GPS III), con una mayor disponibilidad y que reduzca la complejidad de las aumentaciones GPS.
Algunas de las mejoras previstas comprenden:
Incorporación de una nueva señal en L2 para uso civil. Adición de una tercera señal civil (L5): 1176.45 MHz Protección y disponibilidad de una de las dos nuevas señales para servicio de
Seguridad Para la Vida (SOL). Mejora en la estructura de las señales. Incremento en la potencia de señal (L5 tendrá un nivel de potencia de -154 dB). Mejora en la precisión (1 – 5 m). Aumento en el número de estaciones monitorizadas: 12 (el doble) Permitir mejor interoperabilidad con la frecuencia L1 de Galileo

El programa GPS III persigue el objetivo de garantizar que el GPS pueda satisfacer requisitos militares y civiles para los próximos 30 años. Este programa se está desarrollando para utilizar un enfoque en 3 etapas (una de las etapas de transición es el GPS II); muy flexible, permite cambios futuros y reduce riesgos. El desarrollo de satélites GPS III comenzó en 2005, y el primero de ellos estará disponible para su lanzamiento en 2012, con el objetivo de lograr la transición completa de GPS III en 2017 [44].
Los desafíos son los siguientes:
Representar los requisitos de usuarios, tanto civiles como militares, en cuanto a GPS.
Limitar los requisitos GPS III dentro de los objetivos operacionales.
Proporcionar flexibilidad que permita cambios futuros para satisfacer requisitos delos usuarios hasta 2030.
Proporcionar solidez para la creciente dependencia en la determinación de posición y de hora precisa como servicio internacional.


RECEPTOR GPS BASICO
El receptor GPS básico discutido en esta tesis es el mostrado en la figura anterior. Las señales transmitidas de los satélites GPS son recibidas por la antena. A través de la cadena de radiofrecuencia (RF) la señal de entrada es amplificada a una amplitud adecuada y la frecuencia es convertida a una frecuencia de salida deseada. Un convertidor analógico a digital (ADC) es usado para digitalizar la señal de salida. La antena, señales de RF, y el ADC es el hardware usado en el receptor.
Después de que las señales son digitalizadas, el software es usado para su procesamiento, y es por eso que a esta tesis se le da un enfoque de software. La adquisición significa encontrar la señal de un cierto satélite.
El lazo de seguimiento (marcado en la figura anterior) es usado para encontrar la transición de la fase de los datos de navegación, aquí cabe mencionar que el seguimiento es la parte central de esta tesis aunque en algunos capítulos se hable en general sobre los receptores GPS basados en software no perdamos de vista que el objetivo es el estudio e implementación del bloque de seguimiento del receptor de señales GPS. En un receptor convencional, la adquisición y el seguimiento son realizados por hardware.

CRITERIOS DE PRESENTACION
Hay dos criterios posibles de implementación. Uno, es una manera simple de seguir el diagrama de flujo de la señal mostrado en la figura anterior. En este criterio se comienza con la estructura de la señal del sistema GPS y los métodos para procesar la señal para obtener la información necesaria. Esta información será usada para calcular las posiciones de los satélites y los pseudorangos. Usando la posición de los satélites y los pseudorangos, puede ser encontrada la posición del usuario. En este criterio, la discusión será simple, de un objetivo a otro. Sin embargo, la desventaja de este criterio es que los lectores no tendrán una idea clara ya que estos pasos son necesarios. Entenderían el concepto de la operación del GPS solo después de leer un libro completo sobre GPS.
El otro criterio es comenzar con el concepto básico del GPS. Este criterio empezara con el concepto básico de encontrar la posición del usuario de la posición satelital. La descripción de la constelación satelital será presentada. La información detallada de la órbita del satélite está contenida en los datos GPS. Así que para obtener estos datos, la señal GPS debe ser seguida. El código C/A de las señales GPS será presentado. Cada satélite tiene un único código C/A. Un receptor puede realizar la adquisición sobre el código C/A para encontrar la señal. Una vez que el código C/A de un cierto satélite es encontrado, la señal puede ser seguida (seguimiento de código y portadora). Si se realiza un seguimiento correcto, esto ayuda a obtener los datos de navegación. De estos datos, la posición del satélite puede ser encontrada.

Algoritmo de DIJKSTRA
DIJKSTRA (Grafo G, nodo_fuente s) para u < V[G] hacer distancia[u] = INFINITO padre[u] = NULL distancia[s] = 0 adicionar (cola, (s,distance[s])) mientras que cola no es vacía hacer u = extraer_minimo(cola) para todos v < adyacencia[u] hacer si distancia[v] > distancia[u] + peso (u, v) hacer distancia[v] = distancia[u] + peso (u, v) padre[v] = u adicionar(cola,(v,distance[v]) fin si fin para fin mientras que fin para

Resultados de la prueba:
El siguiente ejemplo se desarrollará con el fin de encontrar el camino más corto desde a hasta z:
Leyenda:
Rojo: Aristas y vértices pertenecientes a la solución momentánea. Azul: Aristas y vértices candidatos.

Paso 1 En este primer paso, podemos apreciar que hay tres candidatos: Los vértices b, c y d. En este caso, hacemos el camino desde el vértice a, hasta el vértice d, ya que es el camino más corto de los tres. Solución momentánea: Camino: AD Distancia:5

Pasó 2 Ahora, vemos que se añade un nuevo candidato, el vértice e, y el vértice c, pero esta vez a través del d. Pero el camino mínimo surge al añadir el vértice c. Solución momentánea: Camino: ADC Distancia:9

Pasó 3 En este paso no se añade ningún candidato más puesto que el último vértice es el mismo que en el paso anterior. En este caso el camino mínimo hallado es el siguiente: Solución momentánea: Camino: ADCB Distancia:11
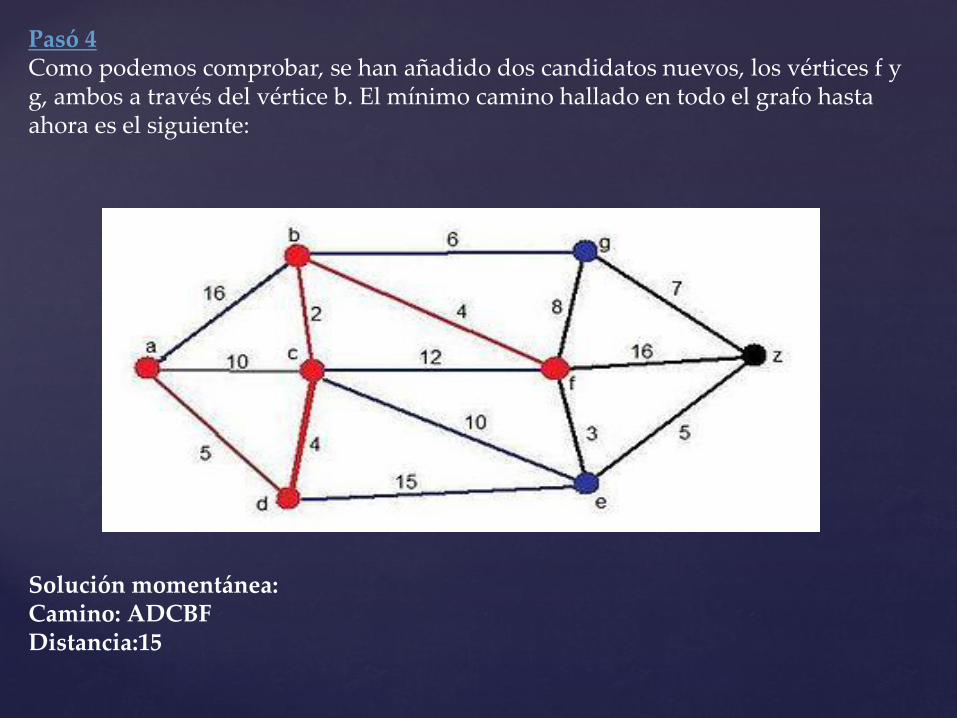
Pasó 4 Como podemos comprobar, se han añadido dos candidatos nuevos, los vértices f y g, ambos a través del vértice b. El mínimo camino hallado en todo el grafo hasta ahora es el siguiente: Solución momentánea: Camino: ADCBF Distancia:15

Pasó 5 En el penúltimo paso, vuelve a aparecer otro candidato: el vértice e, pero esta vez a través del vértice f. De todas formas, el camino mínimo vuelve a cambiar para retomar el camino que venía siguiendo en los pasos anteriores: Solución momentánea: Camino: ADCBFE Distancia:18

Pasó 6 Por fin, llegamos al último paso, en el que sólo se añade un candidato, el vértice z a través del e. El camino mínimo y final obtenido es nada mas y nada menos k: Solución Final: Camino: ADCBFEZ Distancia:23

DESARROLLO DE LA APLICACIÓN EN EL LENGUAJE DE PROGRAMACION JAVA VENTANAS DEL PROGRAMA


GRACIAS


















