Golf Swing Robot EE 486 Project Presentation College of Engineering and Technology Presented by...
22
Golf Swing Robot Golf Swing Robot EE 486 Project Presentation EE 486 Project Presentation College of Engineering and Technology Presented by Nasser Almarri
-
Upload
kevin-patterson -
Category
Documents
-
view
214 -
download
0
Transcript of Golf Swing Robot EE 486 Project Presentation College of Engineering and Technology Presented by...

Golf Swing RobotGolf Swing Robot
EE 486 Project PresentationEE 486 Project Presentation
College of Engineering and Technology
Presented by Nasser Almarri

EE SubdivisionEE Subdivision
CoordinatorCoordinator John BoringJohn Boring LeaderLeader Nasser AlmarriNasser Almarri EditorEditor Charlie SikoCharlie Siko
Faculty Advisors: Faculty Advisors: Prof. Jerry HatfieldProf. Jerry HatfieldDr. Walter HopkinsDr. Walter Hopkins
Outside Project AdvisorOutside Project Advisor Eng. Art MittendorfEng. Art Mittendorf
Presented by Nasser Almarri

OutlineOutline
Project OverviewProject Overview System Block System Block
DiagramDiagram Design ChangesDesign Changes VISUAL BASIC GUIVISUAL BASIC GUI Prototype TestingPrototype Testing
EncoderEncoder Cost Cost ScheduleSchedule TasksTasks Launch MonitorLaunch Monitor GUI IntegrationGUI Integration
Presented By Nasser Almarri

Project’s SponsorProject’s Sponsor
Presented by Nasser Almarri
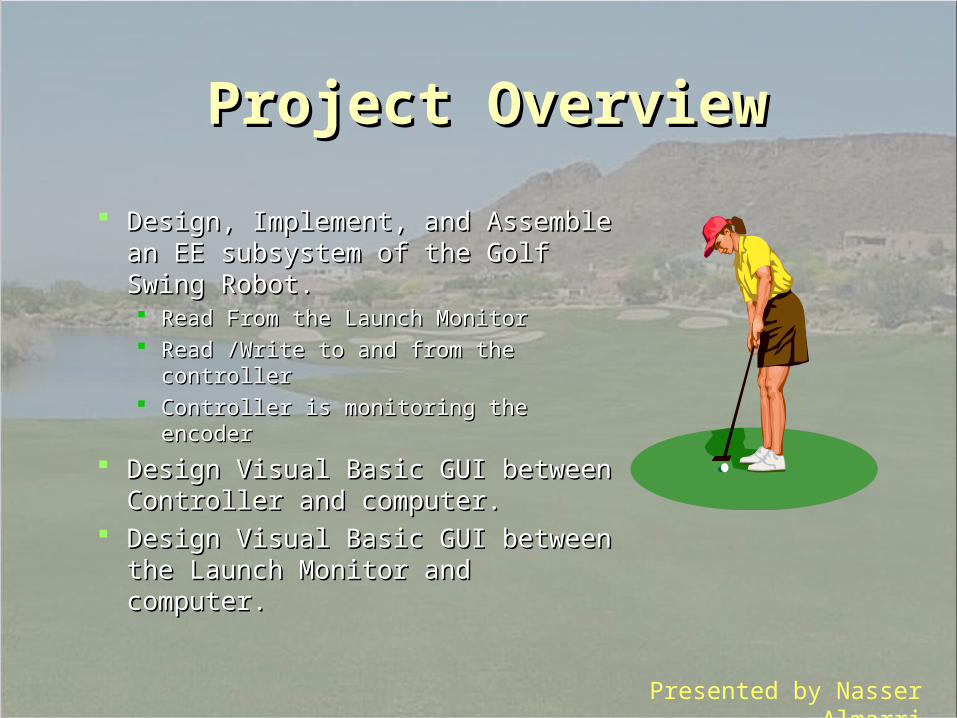
Project OverviewProject Overview
Design, Implement, and Assemble Design, Implement, and Assemble an EE subsystem of the Golf an EE subsystem of the Golf Swing Robot.Swing Robot. Read From the Launch MonitorRead From the Launch Monitor Read /Write to and from the controllerRead /Write to and from the controller Controller is monitoring the encoderController is monitoring the encoder
Design Visual Basic GUI between Design Visual Basic GUI between Controller and computer.Controller and computer.
Design Visual Basic GUI between Design Visual Basic GUI between the Launch Monitor and computer.the Launch Monitor and computer.
Presented by Nasser Almarri
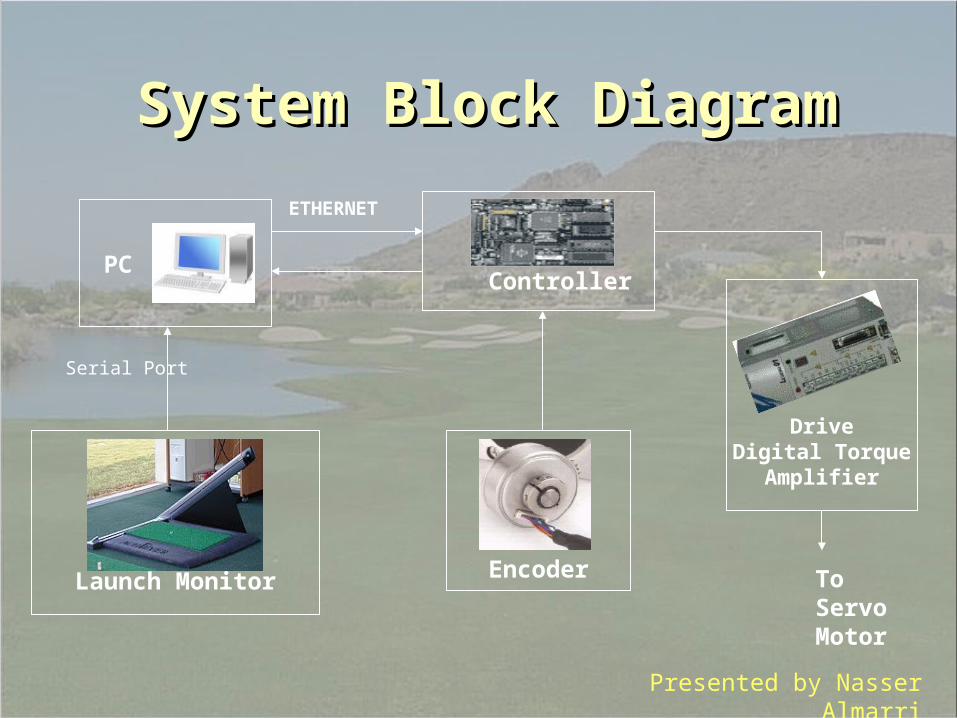
EncoderLaunch Monitor
Controller PC
System Block DiagramSystem Block Diagram
Presented by Nasser Almarri
ETHERNET
Serial Port
DriveDigital Torque
Amplifier
To Servo Motor

Design ChangesDesign Changes
We will not assemble a We will not assemble a complete ROBOTcomplete ROBOT
ME Team Switched to a ME Team Switched to a PAPER designPAPER design
We designed the EE We designed the EE subsystemsubsystem
We are building and We are building and testing the EE subsystem testing the EE subsystem onlyonly
Presented By Nasser Almarri

Visual basic GUIVisual basic GUI
Presented By Nasser Almarri

Prototype TestingPrototype Testing
PC Interface w/ PC Interface w/ ControllerController
VB GUIVB GUI Text file - Yterm2000Text file - Yterm2000
Encoder PositionEncoder Position Data Collection Data Collection
Direct w/ ControllerDirect w/ Controller
PC Interface w/ PC Interface w/ Launch MonitorLaunch Monitor
VB GUI VB GUI Raw data filesRaw data files
Presented by John Boring

Launch Launch MonitorMonitor Works with Golf Achiever Works with Golf Achiever
softwaresoftware Connects with computer by Connects with computer by serial port cableserial port cable Outputs velocity and launch Outputs velocity and launch angleangle Used to optimize a golfer’s Used to optimize a golfer’s clubsclubs
Presented by John Boring

Software InterfacingSoftware Interfacing
Visual Basic GUI Visual Basic GUI Two separate software Two separate software
Yterm2000 Yterm2000 Golf AchieverGolf Achiever
One PC will be usedOne PC will be used Multiple ConnectionsMultiple Connections Shared GUIShared GUI
Presented by John Boring
Potential Problem Potential Problem & Solution& Solution
Multiple Hardware Multiple Hardware Port / connection problemPort / connection problem
ControllerController Ethernet connectionEthernet connection
Launch MonitorLaunch Monitor Serial port connectionSerial port connection
Presented by John Boring

Integrating the Monitor Integrating the Monitor & the GUI& the GUI
Methods to use Golf Methods to use Golf Achiever SoftwareAchiever Software Capitalize on Raw Capitalize on Raw
Data functionsData functions Open Raw Data FileOpen Raw Data File Save Raw Data FileSave Raw Data File
Open those files from Open those files from inside VB GUIinside VB GUI
Presented by John Boring

Monitoring Elbow Monitoring Elbow PositionPosition
Presented by Charles Siko

Background on Background on EncodersEncoders
Used to determine positionUsed to determine position Many typesMany types
Linear/RotaryLinear/Rotary
Absolute: each position is uniqueAbsolute: each position is uniqueIncremental: position is relative Incremental: position is relative
Magnetic: durable, lower resolutionMagnetic: durable, lower resolutionOptical: high resolution, high speed Optical: high resolution, high speed
Presented by Charles Siko

Absolute EncodersAbsolute Encoders Singleturn- 360Singleturn- 360° is divided into digital values ° is divided into digital values Multiturn-in addition to the coded disk this includes an Multiturn-in addition to the coded disk this includes an
integrated gear which can count multiple revolutionsintegrated gear which can count multiple revolutions
Typical OutputsTypical Outputs
Presented by Charles Siko

Presented by Charles Siko
Choice 1: BEI optical absolute encoder
$680.00

Choice 2: Netzerprecision electrical absolute encoder
Presented by Charles Siko
$75.00**

Cost - Cost - electrical subdivision electrical subdivision $7000 limit$7000 limit
ItemItem ~ Price~ Price SupplierSupplier Purchase DatePurchase Date
Launch Launch MonitorMonitor
providedprovided SponsorSponsor N/AN/A
Motor Motor ControllerController
$569$569 YaskawaYaskawa 3/3/033/3/03
Motor DriveMotor Drive $3680$3680 YaskawaYaskawa 3/3/033/3/03
EncoderEncoder $700$700 Netzerprecision/Netzerprecision/BEIBEI
3/3/033/3/03
AccessoriesAccessories $250$250 Domestic Domestic productsproducts
As neededAs needed
SoftwareSoftware $500$500 YaskawaYaskawa As neededAs needed
Presented by Charles Siko

ScheduleSchedule
Important DatesImportant Dates 3/3-3/4 3/3-3/4 Finishing up Draft Status ReportFinishing up Draft Status Report 3/53/5 Draft Status Report DueDraft Status Report Due 3/5-2/93/5-2/9 Work on Final Status ReportWork on Final Status Report 3/9-4/13/9-4/1 Work on WebsiteWork on Website 4/14/1 Final Presentation DayFinal Presentation Day
Presented by Charles Siko

TasksTasksThis week:
Charlie - Write up of encoder system including all specifications, diagrams, and possible mounting configurations.
Nasser - Explanations of how controller/motor/GUI is integrated with any possible specifications.
John - Write up of how to communicate with launch monitor with diagram of how it is set up w/computer. Specific code included if possible
Next week: All parts ordered, continue working on reports
Week of 3/15: Receiving Parts
Week of 3/22: Assembly, troubleshooting
Week of 3/29: Completing Final Documentation
Presented by Charles Siko
Questions ? Questions ?
John Boring Nasser Almarri Charlie Siko
Presented by Charles Siko