GMT Zusammenfassung Lokales Tangential- & lokales ... · Lokales Tangential- & lokales...
18
GMT Zusammenfassung Ren ´ e Kaufmann - 11. Februar 2007 1 Grundlagen Geod ¨ asie Wissenschaft von der Gewinnung erdbezogener, objektbezogener Beobachtungen und Abbildung in phys. Modelle Aufgabengebiete (nach Genauigkeit sortiert:) Forschung, Industriemess- technik, Ingenieurgeod ¨ asie, Grundlagen, Detailaufnahme, Bauwesen, Umwelt/ RIS, Navigation Arbeitsprinzipien Ordnungsprinzip Vom Grossen ins Kleine, Messungen ins Netz anpassen, Nachbarschaftsprinzip Nahe beieinanderliegende Punk- te vom gleichen Anschlusspunkt aus bestimmen. Verhinderung von UNgenau- igkeiten Zuverl ¨ assigkeit und Kontrolle unabh ¨ angige Kontrollen vornehmen, Wirtschaftlichkeitsprinzip So genau wie erforderlich, nicht wie technisch m ¨ o- glich. Geod ¨ atische Bezugsfl ¨ achen Ersatzfl ¨ ache ist immer eng mit der geforderten Genauigkeit und der Ausdeh- nung des abzubildenden Gebietes verkn ¨ upft. Geoid Fl¨ ache senkrecht zur Lotrichtung, Potential der Schwerkraft in allen Punkten gleich, keine analytische Fl ¨ ache → nur f¨ ur Schwere und H¨ ohenmes- sungen, nicht f ¨ ur Lagemessung Rotationsellipsoid Bezugssystem mit definierter Metrik und Kr ¨ ummung Referenzellipsoid Referenzfl ¨ ache f ¨ ur Landesvermessung. Ersatzfl ¨ ache f ¨ ur begrenzten Teil des Geoids. Zentrum des Ellipsoids liegt nicht im Erdschwer- punkt, kleine Halbachse b parallel zur Erdachse. CH: Bessel. Mittleres Erdellipsoid Globale Approximation an das Geoid. H¨ ohenunter- schied zwischen Ellipsoid und Geoid = Geoidundulation Schmiegungskugel lokale Ann ¨ aherung an das Rotationsellipsoid Ebene Geeignet f ¨ ur Lagebestimmung, wenn Entfernung vom Ber¨ uhrungs- punkt zur Kugel < 5km Geod ¨ atische Koordinatensysteme Geographische Koordinaten L¨ ange: Winkel zwischen Nullmeridianebe- ne (Greenwich) und Meridianebene, Breite: Winkel zwischen Aequatorebene und Ellipsoidnormale Geozentisches, erdfestes, kartesisches Koordinatensystem Null- punkt im Schwerpunkt der Erde. Z-Achse: Richtung: Rotationsachse. X-Achse. Rechtwinkelig zu Z-Achse, ungef¨ ahr in Greenwich. Y-Achse, rechtwinkelig auf X-Z-Ebene. GPS Ebene, kartesische Koordinatensysteme Projektion von Rotationsellipsoid oder Schmiegungskugel auf eine Fl ¨ ache ⇒L¨ a- ngen-, Winkel-, Fl ¨ achenverzerrung. F¨ ur Landesvermessungen sind winkeltreue Abbildungen zweckm ¨ assiger. Lokales Tangential- & lokales topozentisches System Theodolite und Niveliere arbeiten damit. Horizont liegt rechtwinkelig zum Lot. CH Koordinatensystem Schiefachsige, winkeltreue Zylinderprojektion. El- lipsoid → Kugel → Zylinder Nullpunkt bei der alten Sternwarte in Bern: Y = 200000km, X = 600000km Reduktion infolge der Projektion Distanzen (EDM, GPS) m ¨ ussen reduziert werden, bevor sie im ebenen Koordi- natensystem verwendet werden d ¨ urfen. Distanzen aus Koordinaten m¨ ussen ver- bessert werden. Meteokorrigierte Horizontaldistanz muss auf Projektionsfl ¨ ache CH reduziert werden. Reduktion auf Projektionsfl ¨ ache D 0 = d hor - d hor Hm R + Hm Hm : Mittlere H ¨ ohe der beiden Punkte R : Erdradius (≈ 6 379 000m) Korrektur wegen Projektionsverzerrung CH- Projektionssystem bedingt L ¨ angenverzerrungen. Abh¨ anging von Nord-S¨ ud Entfernung von Bern und von Nord-S¨ ud Ausdehnung D ≈ D 0 + D 0 X 2 m 2R 2 + D 0 ΔX 2 24R 2 Xm: N-S-Abstand von Bern = 1 2 (X P 1 + X P 2 ) ΔX ≈ X P 2 - X P 1 Geod ¨ atische Bezugsrichtungen Geographisch Nord Richtung zur Rotationsachse der Erde Magnetisch Nord Durch Magnetfeld der Erde vorgegebene Richtung. Ist zeitliche Schwankungen unterworfen wegen Sonnenwinde und Wanderung des magnetischen Pols. Kartennord Nordrichtung in der Projektionsebene Azimut Az(A, B) WInkel zwischen Karten-Nord und Verbindung A und B Meridiankonvergenz γ Winkel zwischen geographisch- und Karten-Nord. Entstehung durch CH Projektion Kugel → Ebene. Meridiane verlaufen nicht durch geographisch Nord magnetische Deklination δ Winkel zwischen magnetisch- und geogra- phisch Nord. Winkelbezeichnungen Zenit-, H ¨ ohen-, Tiefen-, Nadirwinkel Masseinheiten und Massverh ¨ altnisse Lichtgeschwindigkeit c ≈ 3 · 10 8 [m/s] ≈ 63.6620[gon] Umrechnung 400gon = 360 ◦ =2πrad 1. Geod ¨ atische Fundamentalformel b r = α ρ ⇒ 1 mgon Verschiebung = 1m auf 600m Kathetenzuschlagsformel Δd ≈ h 2 2ds 1
Transcript of GMT Zusammenfassung Lokales Tangential- & lokales ... · Lokales Tangential- & lokales...
GMT ZusammenfassungRene Kaufmann - 11. Februar 2007
1 Grundlagen
Geodasie Wissenschaft von der Gewinnung erdbezogener, objektbezogenerBeobachtungen und Abbildung in phys. Modelle
Aufgabengebiete (nach Genauigkeit sortiert:) Forschung, Industriemess-technik, Ingenieurgeodasie, Grundlagen, Detailaufnahme, Bauwesen, Umwelt/RIS, Navigation
Arbeitsprinzipien Ordnungsprinzip Vom Grossen ins Kleine, Messungenins Netz anpassen, Nachbarschaftsprinzip Nahe beieinanderliegende Punk-te vom gleichen Anschlusspunkt aus bestimmen. Verhinderung von UNgenau-igkeiten Zuverlassigkeit und Kontrolle unabhangige Kontrollen vornehmen,Wirtschaftlichkeitsprinzip So genau wie erforderlich, nicht wie technisch mo-glich.
Geodatische BezugsflachenErsatzflache ist immer eng mit der geforderten Genauigkeit und der Ausdeh-nung des abzubildenden Gebietes verknupft.
Geoid Flache senkrecht zur Lotrichtung, Potential der Schwerkraft in allenPunkten gleich, keine analytische Flache → nur fur Schwere und Hohenmes-sungen, nicht fur Lagemessung
Rotationsellipsoid Bezugssystem mit definierter Metrik und Krummung
Referenzellipsoid Referenzflache fur Landesvermessung. Ersatzflache furbegrenzten Teil des Geoids. Zentrum des Ellipsoids liegt nicht im Erdschwer-punkt, kleine Halbachse b parallel zur Erdachse. CH: Bessel.
Mittleres Erdellipsoid Globale Approximation an das Geoid. Hohenunter-schied zwischen Ellipsoid und Geoid = Geoidundulation
Schmiegungskugel lokale Annaherung an das Rotationsellipsoid
Ebene Geeignet fur Lagebestimmung, wenn Entfernung vom Beruhrungs-punkt zur Kugel < 5km
Geodatische KoordinatensystemeGeographische Koordinaten Lange: Winkel zwischen Nullmeridianebe-ne (Greenwich) und Meridianebene, Breite: Winkel zwischen Aequatorebeneund Ellipsoidnormale
Geozentisches, erdfestes, kartesisches Koordinatensystem Null-punkt im Schwerpunkt der Erde. Z-Achse: Richtung: Rotationsachse. X-Achse.Rechtwinkelig zu Z-Achse, ungefahr in Greenwich. Y-Achse, rechtwinkelig aufX-Z-Ebene. GPS
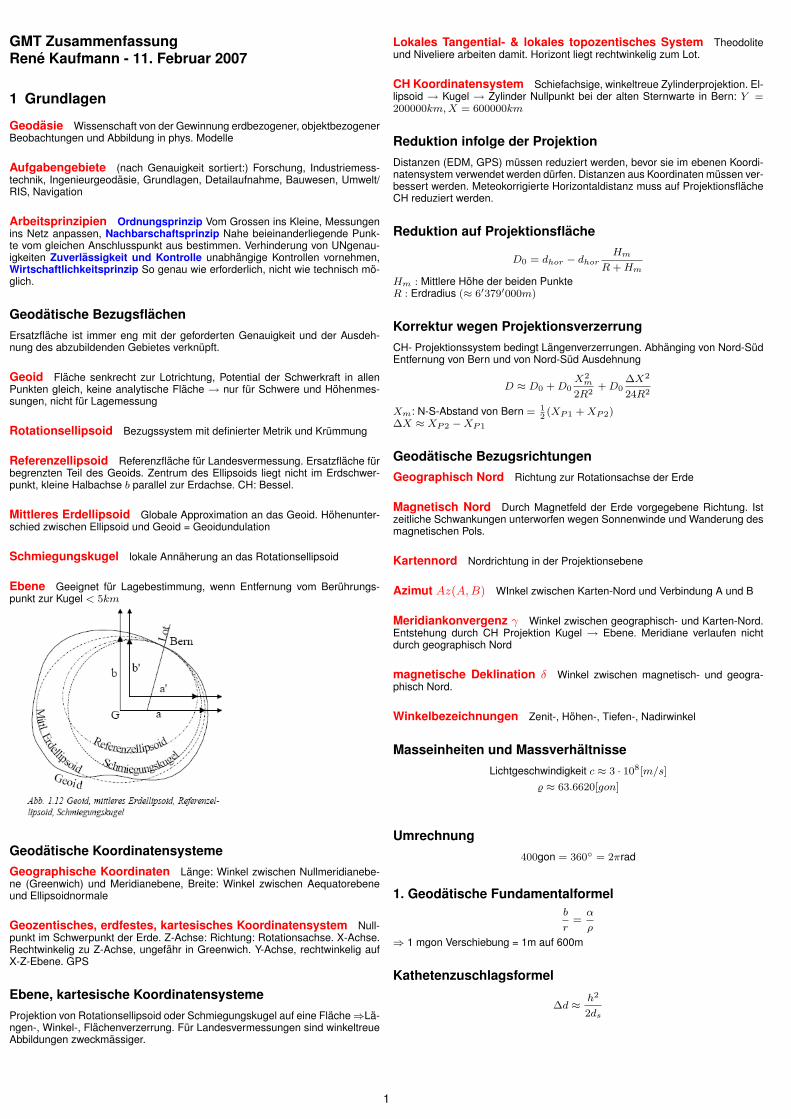
Ebene, kartesische KoordinatensystemeProjektion von Rotationsellipsoid oder Schmiegungskugel auf eine Flache⇒La-ngen-, Winkel-, Flachenverzerrung. Fur Landesvermessungen sind winkeltreueAbbildungen zweckmassiger.
Lokales Tangential- & lokales topozentisches System Theodoliteund Niveliere arbeiten damit. Horizont liegt rechtwinkelig zum Lot.
CH Koordinatensystem Schiefachsige, winkeltreue Zylinderprojektion. El-lipsoid → Kugel → Zylinder Nullpunkt bei der alten Sternwarte in Bern: Y =200000km, X = 600000km
Reduktion infolge der ProjektionDistanzen (EDM, GPS) mussen reduziert werden, bevor sie im ebenen Koordi-natensystem verwendet werden durfen. Distanzen aus Koordinaten mussen ver-bessert werden. Meteokorrigierte Horizontaldistanz muss auf ProjektionsflacheCH reduziert werden.
Reduktion auf Projektionsflache
D0 = dhor − dhorHm
R + Hm
Hm : Mittlere Hohe der beiden PunkteR : Erdradius (≈ 6′379′000m)
Korrektur wegen ProjektionsverzerrungCH- Projektionssystem bedingt Langenverzerrungen. Abhanging von Nord-SudEntfernung von Bern und von Nord-Sud Ausdehnung
D ≈ D0 + D0X2
m
2R2+ D0
∆X2
24R2
Xm: N-S-Abstand von Bern = 12(XP1 + XP2)
∆X ≈ XP2 −XP1
Geodatische BezugsrichtungenGeographisch Nord Richtung zur Rotationsachse der Erde
Magnetisch Nord Durch Magnetfeld der Erde vorgegebene Richtung. Istzeitliche Schwankungen unterworfen wegen Sonnenwinde und Wanderung desmagnetischen Pols.
Kartennord Nordrichtung in der Projektionsebene
Azimut Az(A, B) WInkel zwischen Karten-Nord und Verbindung A und B
Meridiankonvergenz γ Winkel zwischen geographisch- und Karten-Nord.Entstehung durch CH Projektion Kugel → Ebene. Meridiane verlaufen nichtdurch geographisch Nord
magnetische Deklination δ Winkel zwischen magnetisch- und geogra-phisch Nord.
Winkelbezeichnungen Zenit-, Hohen-, Tiefen-, Nadirwinkel
Masseinheiten und MassverhaltnisseLichtgeschwindigkeit c ≈ 3 · 108[m/s]
% ≈ 63.6620[gon]
Umrechnung400gon = 360◦ = 2πrad
1. Geodatische Fundamentalformelb
r=
α
ρ
⇒ 1 mgon Verschiebung = 1m auf 600m
Kathetenzuschlagsformel
∆d ≈h2
2ds
1
Massstab
M =1
m=
ZeichenstreckeNaturstrecke
m: Massstabszahl
NeigungsverhaltnisseNeigung einer Strecke oder Flache kann ausgedruckt werden durch
Winkel α Steigungs- oder Gefallwinkel (bei Hangen)
Boschungsverhaltnis (h : e) Bei Querneigung von Strassen und Bo-schungen
Prozent- oder Promilleangaben Hohenunterschied auf 100 bzw. 1000Meter horizontaler Strecke. Langsneigung von Verkehrswegen.———————————————————————————————–
2 Basismesstechnik und einfache Hilfsmittel
JalonPunktsignalisation ...
Fluchten von Geraden Messen der Distanz von A nach B mit Messband,falls Distanz langer als Band. Aufwinkeln oder Abstecken von Detailpunkten mitPentaprisma. Visualisierung von Bauachsen
Direktes Einfluchten von Punkten in eine Gerade vom Endpunkt zumAnfangspunkt
Indirektes Einfluchten iterativ mit zwei Beobachtern
SenkelLotrechtstellen von Jalon, Abloten von Distanzen, Zentrieren
DoppelpentaprismaEinfluchten von Punkten in eine Gerade, Verlangern von Fluchten, Aufwinkelnvon Punkten auf Messlinie, Abstecken von orthogonalen Werten bezogen aufMesslinie.
MessbandNur Bander aus Stahl, Lange maximal 30 Meter.
Durchhang
∆d ≈8∆h2
3dIst
Staffelmessung in geneigtem Gelande ...
Handgefallemesser Bestimmung von Hohen (Baume, Gebaude), Kontrollevon kunstlichen Neigungen (Boschungen), Absteckung von Achsen mit vordefi-nierten Langsneigung.
LageaufnahmeEinbindeverfahren Jalon, Senkel, Messband, zwei Personen. Messlinienwerden in ein ubergoerdnetes Messliniennetz eingebunden. Schnittpunkte ein-messen. Kontrollen!!!
Orthogonalverfahren Jalon, Messband, Senkel, Doppelpentaprisma, zweiPersonen. Von Messlinie werden rechtwinklige Abstande zu den aufzunehmen-den Punkten gemessen. Bestimmung des rechten Winkel mit Doppelpentapris-ma. Kontrolle mit Pythagoras.
Zentrierungoptisches Lot Genauigkeit: 0.5mm
Laserlot Vorteil: Handhabung
Zentrierstab Genauigkeit: 1-2mm
Schnurlot Genauigkeit: 2mm bei Windstille
Horizontierung
1. Rohrenlibelle parallel zu zwei Fussschrauben, horizontieren (2)1. 2. Alhida-de um 100gon drehen und einstellen (1). Weitere 100gon ⇒ Spielpunkt. Jetztspielen, bis Spielpunkt ruhig bleibt.
Sensoraufstellung mit optischem Lot/ LaserlotAusgangsstellung→ Grobzentrierung→ Grobhorizontierung→ Feinhorizontie-rung → Feinzentrierung
ZwangszentrierungAnordnung belibt fur alle Messungen die selbe. Nur Messgerate werden ausge-tausht. Fehlerhafte Zentrierung ⇒ Systematische Fehler
Geodatisches Koordinatensystempositive X-Achse zeigt nach Norden ,Y-Achse nach Osten, Winkel im Uhrzeiger-sinn positiv———————————————————————————————–
3 Ebenes Koordinatenrechnen
X-Achse nach Norden, Y-Achse nach Osten.Kordinatenpaar: (Y, X), Winkel im Uhrzeigersinn
Erste Geodatische Hauptaufgabe, Polares Anhangen
Gegeben YA, XA
Gemessen DAB , Az(A, B)Gesucht YB , XB
∆Y = DAB sin Az(A, B)∆X = DAB cos Az(A, B)
Zweite Geodatische Hauptaufgabe
Gegeben YA, XA, YB , XB
Gesucht Az(A, B), DAB
Az(A, B) = arctan ∆Y∆X
DAB =√
∆Y 2 + ∆X2
∆Y/∆X + - + -Qudadrant 1 2 3 4
Azimut 0 +200 +200 +400
∆Y und Vorzeichen negativ: ⇒ +400
Koordinatentransformationlokale Koordinaten → Landeskoordinaten
Translation [YP
XP
]=
[yP
xP
]+
[Y0
X0
]
Rotation(y, x) → (Y, X), gleichsinnig[
YP
XP
]=
[cos ϕ sin ϕ− sin ϕ cos ϕ
] [yp
xp
]Rucktransformation[
yP
xP
]=
[cos ϕ − sin ϕsin ϕ cos ϕ
] [Yp
Xp
](y, x) → (X, Y ),ungleichsinnig[
YP
XP
]=
[cos ϕ sin ϕ− sin ϕ cos ϕ
] [xp
yp
][
yP
xP
]=
[sin ϕ cos ϕcos ϕ − sin ϕ
] [Xp
Yp
]1(2)=mit 2 Schrauben
2

Massstabsfaktor [YP
XP
]= m
[yP
xP
]
Ahnlichkeitstransformation[YP
XP
]= m
[cos ϕ sin ϕ− sin ϕ cos ϕ
] [yP
xP
]+
[Y0
X0
][
yP
xP
]=
1
m
[cos ϕ − sin ϕsin ϕ cos ϕ
] [YP − Y0
XP −X0
]
m =
√√√√(XP −XQ
)2+(YP − YQ
)2(xp − xQ
)2+(yP − yQ
)2Ahnlichkeitsabbildung ist verzerrungsfrei!
Affine Transformation[YP
XP
]=
[a bc d
] [yP
xP
]+
[Y0
X0
][
yP
xP
]=
[a bc d
]−1 [YP − Y0
XP −X0
]
m =
√√√√(XP −XQ
)2+(YP − YQ
)2(xp − xQ
)2+(yp − yQ
)2———————————————————————————————–
4 Terrestrische Koordinatenbestimmung
Fixpunktfeld der Landes- und Amtlichen VermessungOrdnung I. (30-50 km), II. (10-30 km), III. (3-5 km), IV. Ordnung.
Lagefixpunkte 1 (LFP1) Triangulationspunkte (TP) I. - III. Ordnung. Eswerden nur Richtung und Winkel gemessen.
Lagefixpunkte 2 (LFP2) TP IV. Ordnung, fur Parzellar- und Ingenieurver-messung. Distanzen: 800-1500 m. Nachbarschaftsgenauigkeit
Basispunkte (LFP3) Polygonpunkte.
Terristrische Methoden der NetzverdichtungBestimmung von Neupunktkordinaten: polygonometrische (linienweise) Bestim-mung, punktweise Bestimmung, netzweise Bestimmung
Polygonometrische BestimmungsartenFreier Polygonzug Beidseitig nicht an Koordinaten angeschlossen. Loka-les Koordinatensyste.
Einseitig (=Koordinaten, Richtung) angeschlossener Polygonzuggeringe Kontrollmoglichkeiten, ungunstige Varianzfortpflanzung. Anwendung inStollen.
Beidseitig (Koordinaten) angeschlossener Polygonzug Als freierPolygonzug berechnen, angehangt an Koordinatenwert von A. Anschliessendberechung des Koordinatenwert E.
Beidseitig (Koordinaten, Richtung) angeschlossener PolygonzugKontroll-moglichkeiten: Vergleich berechneten mit vorgegebenen Koordinaten.Vergleich des Azimutes.
Geschlossener Polygonzug, Ringpolygon Grobe Fehler konnen nichtaufgedeckt werden. Konnen nicht mittels Drehstreckung eingepasst werden.
EinzelpunkteinschaltungNetzverdichtung um Koordinaten eines einzelnen Punktes zu bestimmen
Vorwartseinschneiden Gegeben: P1, P2, Az(1, N), AZ(2, N)Gesucht: Koordinaten N
α = Az(P1, P2)−Az(P1, N)
β = Az(P2, N)−Az(P2, P1)
γ = 200− α− β
a
c=
sin α
sin γ,b
c=
sin β
sin γ
Az(P1, N) = Az(P1, P2)± α
Az(P2, N) = Az(P2, P1)± β
YN = YP1 + b sin(Az(P1, N))
XN = XP1 + b cos(Az(P1, N))
Kontrolle: von P2 auch berechnen.
Seitwartschneiden Auf einem von zwei Fixpunkten kann nicht stationiertwerden. Auf Neupunkt wird der Winkel gemessen. ⇒ Vorwartseinschneiden.Gefahrlicher Kreis!
Geradenschnitt Koordinaten des Schnittpunktes bestimmen. Gegeben sindvier Punkte.
Bogenschnitt Gegeben: A, B, DAN , DBN
Gesucht: Koordinaten NAz(A, B), DAB mit 2. GHA
α = arccos
(b2 + c2 − a2
2bc
)Az(A, N) = Az(A, B)± α
2 Losungen!YN = YA + b sin(Az(P1, N))
XN = XA + b cos(Az(P1, N))
Ruckwartseinschneiden Gegebn sind Koordinaten von drei Punkten alsauch die Richtung zum Neupunkt. Zwei Winkel beim Neupunkt berechnen, da-nach Vorwartseinscheiden. Vorsicht: Punkte sollten nicht auf einem Kreis liegen!
Freie Stationierung Im Fixpunktfeld konnen die Koordinaten eines belie-bigen Punktes bestimmt werden, indem von diesem Punkt aus Richtung undDistanz zu den Fixpunkten gemessen werden.
Richtungs- und WinkelmessungWinkel werden in orientierten Richtungen angegeben. Horizontalwinkel werdennur berechnet, nicht gemessen. Vertikalwinkel wird gemessen (mit Theodolit).
Horizontale Richtungsmessung Horizontalwinkel wird aus der Differenzzweier Richtungen berechnet. Falls eine der beiden Richtungen durch Ordina-te geht, dann wird der Winkel zum Zielpunkt als Azimut bezeichnet. Wird derWinkel mit Abriss berechnet, so heisst der Wert orientierte Richtung.
Vertikalmessung Wird direkt mit Theodolit gemessen, da die Ablesestellefest installiert und eindeutig definiert ist. Gerat ist horizontiert!
Zenitwinkel Zenit als Nullrichtung. Horizontallage entspricht 100 gon.
Hohenwinkel Horizont als Nullrichtung.
3
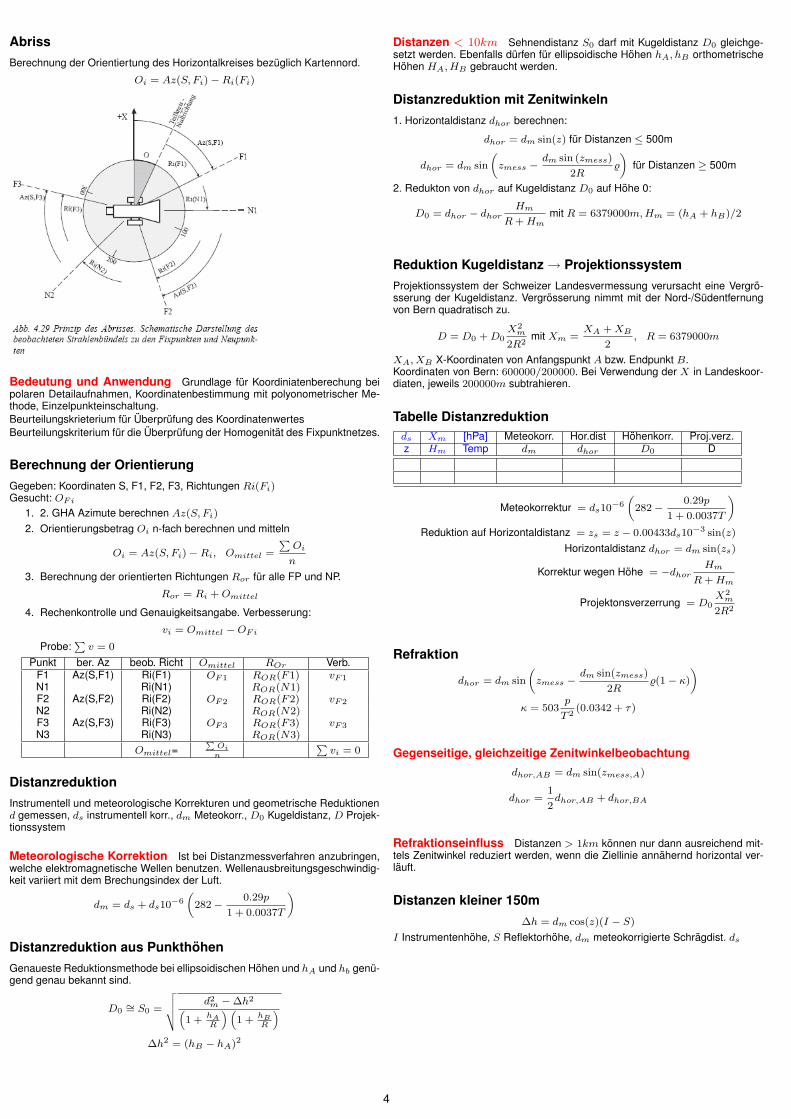
AbrissBerechnung der Orientiertung des Horizontalkreises bezuglich Kartennord.
Oi = Az(S, Fi)−Ri(Fi)
Bedeutung und Anwendung Grundlage fur Koordiniatenberechung beipolaren Detailaufnahmen, Koordinatenbestimmung mit polyonometrischer Me-thode, Einzelpunkteinschaltung.Beurteilungskrieterium fur Uberprufung des KoordinatenwertesBeurteilungskriterium fur die Uberprufung der Homogenitat des Fixpunktnetzes.
Berechnung der OrientierungGegeben: Koordinaten S, F1, F2, F3, Richtungen Ri(Fi)Gesucht: OFi
1. 2. GHA Azimute berechnen Az(S, Fi)
2. Orientierungsbetrag Oi n-fach berechnen und mitteln
Oi = Az(S, Fi)−Ri, Omittel =
∑Oi
n
3. Berechnung der orientierten Richtungen Ror fur alle FP und NP.
Ror = Ri + Omittel
4. Rechenkontrolle und Genauigkeitsangabe. Verbesserung:
vi = Omittel −OFi
Probe:∑
v = 0
Punkt ber. Az beob. Richt Omittel ROr Verb.F1 Az(S,F1) Ri(F1) OF1 ROR(F1) vF1
N1 Ri(N1) ROR(N1)F2 Az(S,F2) Ri(F2) OF2 ROR(F2) vF2
N2 Ri(N2) ROR(N2)F3 Az(S,F3) Ri(F3) OF3 ROR(F3) vF3
N3 Ri(N3) ROR(N3)
Omittel=∑
Oin
∑vi = 0
DistanzreduktionInstrumentell und meteorologische Korrekturen und geometrische Reduktionend gemessen, ds instrumentell korr., dm Meteokorr., D0 Kugeldistanz, D Projek-tionssystem
Meteorologische Korrektion Ist bei Distanzmessverfahren anzubringen,welche elektromagnetische Wellen benutzen. Wellenausbreitungsgeschwindig-keit variiert mit dem Brechungsindex der Luft.
dm = ds + ds10−6
(282−
0.29p
1 + 0.0037T
)
Distanzreduktion aus PunkthohenGenaueste Reduktionsmethode bei ellipsoidischen Hohen und hA und hb genu-gend genau bekannt sind.
D0∼= S0 =
√√√√ d2m −∆h2(
1 + hAR
)(1 + hB
R
)∆h2 = (hB − hA)2
Distanzen < 10km Sehnendistanz S0 darf mit Kugeldistanz D0 gleichge-setzt werden. Ebenfalls durfen fur ellipsoidische Hohen hA, hB orthometrischeHohen HA, HB gebraucht werden.
Distanzreduktion mit Zenitwinkeln1. Horizontaldistanz dhor berechnen:
dhor = dm sin(z) fur Distanzen ≤ 500m
dhor = dm sin
(zmess −
dm sin (zmess)
2R%
)fur Distanzen ≥ 500m
2. Redukton von dhor auf Kugeldistanz D0 auf Hohe 0:
D0 = dhor − dhorHm
R + Hmmit R = 6379000m, Hm = (hA + hB)/2
Reduktion Kugeldistanz→ ProjektionssystemProjektionssystem der Schweizer Landesvermessung verursacht eine Vergro-sserung der Kugeldistanz. Vergrosserung nimmt mit der Nord-/Sudentfernungvon Bern quadratisch zu.
D = D0 + D0X2
m
2R2mit Xm =
XA + XB
2, R = 6379000m
XA, XB X-Koordinaten von Anfangspunkt A bzw. Endpunkt B.Koordinaten von Bern: 600000/200000. Bei Verwendung der X in Landeskoor-diaten, jeweils 200000m subtrahieren.
Tabelle Distanzreduktionds Xm [hPa] Meteokorr. Hor.dist Hohenkorr. Proj.verz.z Hm Temp dm dhor D0 D
Meteokorrektur = ds10−6
(282−
0.29p
1 + 0.0037T
)Reduktion auf Horizontaldistanz = zs = z − 0.00433ds10
−3 sin(z)
Horizontaldistanz dhor = dm sin(zs)
Korrektur wegen Hohe = −dhorHm
R + Hm
Projektonsverzerrung = D0X2
m
2R2
Refraktion
dhor = dm sin
(zmess −
dm sin(zmess)
2R%(1− κ)
)κ = 503
p
T 2(0.0342 + τ)
Gegenseitige, gleichzeitige Zenitwinkelbeobachtungdhor,AB = dm sin(zmess,A)
dhor =1
2dhor,AB + dhor,BA
Refraktionseinfluss Distanzen > 1km konnen nur dann ausreichend mit-tels Zenitwinkel reduziert werden, wenn die Ziellinie annahernd horizontal ver-lauft.
Distanzen kleiner 150m∆h = dm cos(z)(I − S)
I Instrumentenhohe, S Reflektorhohe, dm meteokorrigierte Schragdist. ds
4
Distanzen grosser 150m, Einfluss der ErdkrummungHB = HA + δh + kE − kR = HA + dm cos(z) + kE − kR + I − S
kE Korrekturglied aufgrund Erdkrummung, kR terrestrischen REfraktion
kE =d2
hor
2R
Grossenordnung des Einflusses:
δE =dm sin(z)
2R%
Refraktionskoeffizient
κ =R
RLicht= 503
p
T
(0.0342 +
dT
dh
), RLicht ≈ 8R
⇒ kR = κd2
hor
2R———————————————————————————————–
5 Trigonometrische Hohenbestimmung
Methoden der Hohenbestimmungdynamisch gravimetrisch, barometrisch, hydrostatisch, hydrodynamisch
optisch Hotogrammetrie (digital, analog), Nivellement (trigonometrisch, geo-metrisch)
elektromagnetisch GPS, SLR/LLR, VLBI
HohensystemeMasse und Rotation der Erde fuhren zum Schwerefeld der Erde. Lotlinien stel-len die Richtung der Schwerkraft dar. Tangente an die Lotlinie in einem Punktheisst Lotrichtung. Betrag der Schwerebeschleunigung ist die Schwere. Flachegleichen Potentials der Schwerebeschleunigung heissen Niveauflachen.
Anforderungen an die Definition von Hohen1. eindeutig, unabhangig vom gewahlten Messweg
2. Wasser soll nicht von selbst zwischen zwei Punkten mit gliecher Hohefliessen
3. Hohen sollen Abstande der Punkte von einer Bezugsflache sein.
4. Nivellementsreduktionen, die an den gemessenen Hohenunterschiedenanzubringen sind mussen so klein sein, so dass in lokalen Bereichen mitunreduzierten Ergebnissen gearbeitet werden kann.
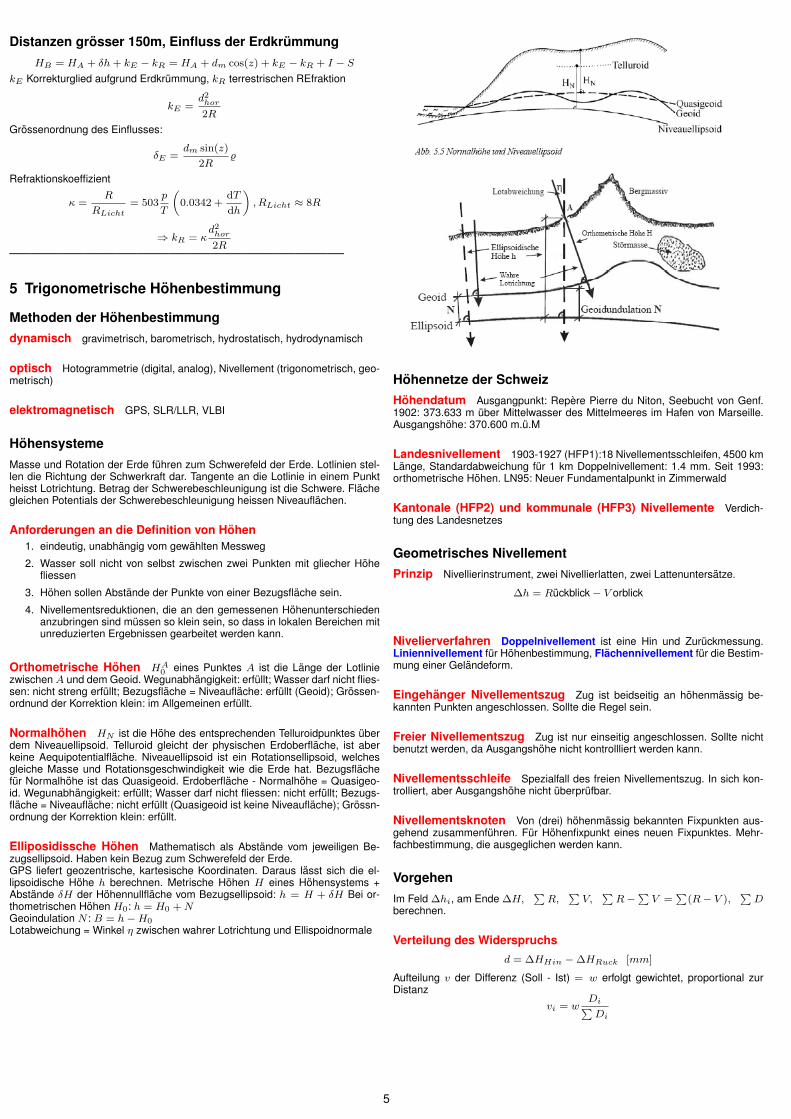
Orthometrische Hohen HA0 eines Punktes A ist die Lange der Lotlinie
zwischen A und dem Geoid. Wegunabhangigkeit: erfullt; Wasser darf nicht flies-sen: nicht streng erfullt; Bezugsflache = Niveauflache: erfullt (Geoid); Grossen-ordnund der Korrektion klein: im Allgemeinen erfullt.
Normalhohen HN ist die Hohe des entsprechenden Telluroidpunktes uberdem Niveauellipsoid. Telluroid gleicht der physischen Erdoberflache, ist aberkeine Aequipotentialflache. Niveauellipsoid ist ein Rotationsellipsoid, welchesgleiche Masse und Rotationsgeschwindigkeit wie die Erde hat. Bezugsflachefur Normalhohe ist das Quasigeoid. Erdoberflache - Normalhohe = Quasigeo-id. Wegunabhangigkeit: erfullt; Wasser darf nicht fliessen: nicht erfullt; Bezugs-flache = Niveauflache: nicht erfullt (Quasigeoid ist keine Niveauflache); Grossn-ordnung der Korrektion klein: erfullt.
Elliposidissche Hohen Mathematisch als Abstande vom jeweiligen Be-zugsellipsoid. Haben kein Bezug zum Schwerefeld der Erde.GPS liefert geozentrische, kartesische Koordinaten. Daraus lasst sich die el-lipsoidische Hohe h berechnen. Metrische Hohen H eines Hohensystems +Abstande δH der Hohennullflache vom Bezugsellipsoid: h = H + δH Bei or-thometrischen Hohen H0: h = H0 + NGeoindulation N : B = h−H0
Lotabweichung = Winkel η zwischen wahrer Lotrichtung und Ellispoidnormale
Hohennetze der SchweizHohendatum Ausgangpunkt: Repere Pierre du Niton, Seebucht von Genf.1902: 373.633 m uber Mittelwasser des Mittelmeeres im Hafen von Marseille.Ausgangshohe: 370.600 m.u.M
Landesnivellement 1903-1927 (HFP1):18 Nivellementsschleifen, 4500 kmLange, Standardabweichung fur 1 km Doppelnivellement: 1.4 mm. Seit 1993:orthometrische Hohen. LN95: Neuer Fundamentalpunkt in Zimmerwald
Kantonale (HFP2) und kommunale (HFP3) Nivellemente Verdich-tung des Landesnetzes
Geometrisches NivellementPrinzip Nivellierinstrument, zwei Nivellierlatten, zwei Lattenuntersatze.
∆h = Ruckblick− V orblick
Nivelierverfahren Doppelnivellement ist eine Hin und Zuruckmessung.Liniennivellement fur Hohenbestimmung, Flachennivellement fur die Bestim-mung einer Gelandeform.
Eingehanger Nivellementszug Zug ist beidseitig an hohenmassig be-kannten Punkten angeschlossen. Sollte die Regel sein.
Freier Nivellementszug Zug ist nur einseitig angeschlossen. Sollte nichtbenutzt werden, da Ausgangshohe nicht kontrollliert werden kann.
Nivellementsschleife Spezialfall des freien Nivellementszug. In sich kon-trolliert, aber Ausgangshohe nicht uberprufbar.
Nivellementsknoten Von (drei) hohenmassig bekannten Fixpunkten aus-gehend zusammenfuhren. Fur Hohenfixpunkt eines neuen Fixpunktes. Mehr-fachbestimmung, die ausgeglichen werden kann.
VorgehenIm Feld ∆hi, am Ende ∆H,
∑R,
∑V,
∑R−
∑V =
∑(R− V ),
∑D
berechnen.
Verteilung des Widerspruchsd = ∆HHin −∆HRuck [mm]
Aufteilung v der Differenz (Soll - Ist) = w erfolgt gewichtet, proportional zurDistanz
vi = wDi∑Di
5
Nur Hohen der gesuchten oder vermarkten Punkte werden berechnet.Gewicht: p = 1
DStandardabweichung der Gewichteinheit (fur 1 km Weglange)
ss =
√∑pdd
2n
mit n= Anzahl TeilstreckenStandardabweichung a, arithmetischen Mittel fu 1 km Nivellement
s0 =sx√
2
Standardabweichung gesamte Hohendifferenz
s[H] =s0√pH
= s0
√∑D
FlachennivellementAufnahme diskreter Punkte Lagen der aufgenommenen Punkte mussenbekannt sein. Instrument mit Horizontalkreis, Distanzmessung mit Raster, Di-stanzfaden oder elektronisch. Kann auch mit Rotationslaser durchgefuhrt wer-den.
Trigonometrische HohenbestimmungPrinzip Auf Standpunkt A mit Instrumentenhohe I wird der Zenitwinkel z unddie Schragdistanz ds oder Horizontaldistanz dhor zum Punkt B mit der Reflek-torhohe S gemessen. Schrag-, Horizontaldistanz Meteokorrigieren. Hohenun-terschied:
∆hAB = dm cos(z) = +(I − S)
∆hAB = dhorcot(z) + (I + S)
Fur Distanzen > 150m: Korrekturglieder aufgrund von Refraktion und Erd-krummung
HB = HA + ∆hkE − kR + I − S = HA + dm cos(z) + kE − kR + I − S
HB = HA + dhorcot(z) + kE − kR + I − S
Einfluss der Erdkrummung Beim Instrumentenstandpunkt A wird eineTangente gelegt. ∆h zu Punkt B bezieht sich auf diese Ebene. ⇒ Abstandzwischen Ebene und Erdkugel.
ke =d2
hor
2R
Grossenordnung des Einflusses
δE =dm sin(z)
2R%
Einfluss der Refraktion Refraktion entsteht dadurch, dass die Dichte derLuft und damit der Brechungsindex mit zunehmender Hohe abnimmt. In Bo-dennahe unterliegt der Temperaturgradient starken Schwankungen, der Druck-gradient nicht. Bei einer Temperaturabnahme von 1◦C/100 m gilt naherungs-weise: RLicht ≈ 8R. Der Refraktionskoeffizient κ hangt von den herrschendenatmospharischen Bedingungen ab.
κ =R
RLicht= 503
p
T 2
Grossenordnung des Einflusses der Refraktion:
δR = κdm sin(z)
R%
Korrektion kr infolge Refraktion
kR = κd2
hor
2R
Trigonometrisches NivellementAneinanderreihung von trigonometrischen Hohenmessungen fuhrt zu grosserenZielweiten → hohere Wirtschaftlichkeit, aber mit verfalschenden Einflusse derterrestrischen Refraktion.
Gegenseitig-gleichzeitige Zenitwinkelmessung Annahme: Refrakti-onskoeffizient ist gleich. Jedoch hoher Messaufwands
Quasi-simultane Methode Zeitliche Verschiebung zwischen den Beob-achtungen
Einfaches und erweitertes Sprungstandverfahren Speziell konstru-ierte Latte mit 5 Zielmarken (genau kalibriert) und gleicher Anzahl von Prismen.Zenitwinkel und Schragdistanzen werden bundelweise gemessen.
motorisierte Verfahren Zwei Latten- und 1 Beobachterfahrzeug, zusatzli-che Sensoren (Temperatursenor fur vertikalen Temperaturgradient). Standard-abweichung fur ein Kilometer Doppelnivellement liegt bei unter 1 mm. Produkti-vitatssteigerung um 40-100 %.
Barometrische HohenmessungPrinzip Bestimmung des Luftdrucks auf verschiedenen Hohen. Der durch-schnittliche Luftdruck p0 auf Meereshohe betragt 760 mm Quecksilber. Bei zu-nehmende Hohe nimmt der Druck logarithmisch ab (Gasgesetz von Boyle- Ma-riotte, Gay-Lussac). Der Luftdruck ist abhangig von Lufttemperatur, Luftfeuch-tigkeit, geographische Breite sowie dem Schwerefeld der Erde.
Instrumente und Genauigkeiten Elektronische Drucksensoren sind kon-struktiv als piezoelektrische, piezoresistive, induktive, kapazitive, Widerstands-, Vibrationsdruckaufnahmer gebaut. Mit Schnittstellen und Signalaufbereitungkonnen sie digitale Daten liefern, die weiterverarbeitet werden konnen. Genau-igkeit: 1m bis wenige Dezimeter. Altimeter ist eine modifizierte Form eines Ba-rometers.
Hydrostatisches NivellementPrinzip der kommunizierenden Rohren. Keine Sichtverbindung notig.
Einfaches hydrostatisches Nivellement Schlauchwaage, eine Weiter-entwicklung ist der Nivelliertaster. Flachennivellement im Einmannbetrieb. Ge-nauikgeit zwischen 1 cm und 2 mm.
Prazisionsschlauchwaage Genauigkeiten bis zu 0.01 mm. Die Hohe wirduber Abtastsysteme ermittlet.
Hohenbestimmung mit GPSNAVSTAR GPS liefern 3-D-Koordinaten in geozentrisch-kartesischen Koordina-tensystem. Diese lassen sich in ellipsoidische jedes beliebigen Landeskoordi-natensystems umformen. Bei Kenntnis des lokalen Geoids ist die Berechnungder orthometrischen Hohe moglich.Zeitlicher Aufwand und Genauikgkeit bei Distanzen uber 1 km sind beim Satelli-tenverfahren hoher als mit der trigonometrischen Hohenmessung. Nivvelierver-fahren ist in den meisten Fallen dem Satellitenverfahren uberlegen. Uber grosseDistanzen und je nach Genauigkeit ist aber GPS wieder wirtschaftlicher.
Weitere BestimmungsmethodenHydrodynamisches Nivellement Wird aus Pegelbeobachtungen gewon-nen. Einflussgrossen: Wasserdichte, Luftdruck, Wind- und Bodenreibung, Stro-mungsverhalten, geostrophische Beschleunmigung.
(VLBI) Very Long Baseline Interferometry Laufzeitdifferenzen elektro-magnetischer Wellenfronten auf zwei Beobachtungsstationen.
SLR/LLR Satellite LAser RAnging, Lunar Laser Ranging. Laufzeit eines La-serimpulses zwischen Bodenstation und einem Satelliten/ Mond wird gemes-sen. Bestimmung von 3-D geozentrische Stationskordinaten.
Satellitenaltimetrie Bewegte Plattform fur einen Sensor. Sendet Mikrowel-lenimpulse im Radarfrequenzbereich aus. Durch Reflexion von der Erdober-flache wird es wieder empfangen. Die Hohe uber der Erdoberflache kann gena-hert bestimmt werden. Naherungsweise kann das Geoid im Bereich der Ozeaneabgetastet werden.
Genauigkeitsrangliste der MessmethodenNivellement, Nachteil: Wirtschaftlichkeit; GPS wenn Distanz > 1km und Geo-id mit gewunschter Genauigkeit bekannt, Vorteil: Aufwand; trigonometrischeHohenbestimmung.———————————————————————————————–
6 Geodatische Statistik
Aufgabe Mit Hilfe der Statistik werden Messungen gegenuber Irrtumern ge-sichert und ihre Genauigkeitsmasse bestimmt. Mit den Messwerten (uberbe-stimmt!) werden folgende statistische Grossen bestimmt: Plausibler Wert; Streu-ung oder Standardabweichung; Genauigkeit und Vertrauensintervall. Unsicher-heit der Grossen wird durch eberbestimmung bestimmt.
6
FehlerartenGrobe Fehler Irrtum oder Wahl eines falschen Modells. Falsch! Messele-mente muss durch die Anordnung kontrolliert sein. Unabhangige Kontrollmes-sungen, Proben, andere Konfiguration, Mehrfachmessung.
Systematische Abweichung Funktionale Komponente der Abweichung.Durch systematische falsche Handhabung, unkalibrierte Messinstumente, Di-stanzmessungen mit falscher Frequenz/ Additionskonstante, Refraktionseinflu-sse, Erdkrummung.
Zufallige Abweichung Grenze des Auflosungsvermogen, Rauschen vonelektronischen Komponenten, externe Einflusse (normalverteilt)
Grundlagenwahrer Wert xw Tatsachlicher Wert in Natura.
Erwartungwert µ E(x), erstes zentrale Moment der Zufallsvariablen x
Bias δ Abweichung des µ von xw bei vorhandenen, nicht erfassten, systema-tischen Fehlern
E(x) = µ = xw + δ
Wahre Abweichung ε Abweichung vom Messwert xi von xw.
Verbesserung v Abweichung des xi von µ. v = µ− xi
In der Statistik: Ist - Soll, Geodasie: Soll - Ist. Idee: Messwert muss um diesenWert verbessert werden.
arithmetisches Mittel x Plausibelsten Schatzwert, bei Normalverteilung.
µ = x =
∑ni=1 xi
n
Abweichung nicht normalverteilt: Benutzung des Median (robuster Schatzwert)x. Medianbildung: Werte vom klkeinsten zum grossten geordnet. Median ist derWert in der Mitte. x = x[(n+1)/2], x = 1
2
(x[n/2] + x[(n/2)+1]
)VerteilungsfunktionenDie Wahrscheinlichkeitsdichte f(x) gibt die Wahrscheinlichkeit an, mit der diediskreten Zufallsvariablen xi vorkommen. Die Varianz V (x) = σ2 ist das zweitezentrale Moment einer Zufallsvariablen. Zentrale Momente sind Momente bezo-gen auf den Erwartungswert. Varianz ist ein Mass der Streuung einer Zufallsva-riablen um ihren Erwartungswert.
Werte beliebiger Normalverteilung lasst sich in standardisierte Werte einerZufallsvariablen transformieren. Erfahrungswert E(z) = 0 und Varianz V (z) =
1, Transformation: z = x−µσ
. µ und σ Erwartungswert bzw. Standardabwei-
chung der Zufallsvariablen x. Wahrscheinlichkeitsdichte: ϕ(z) = 1√2π
e−1/2z2
Verteilungsfunktioin gibt Wahrscheinlichkeit an, mit der ein Messwert im Be-reich liegt: Φ(z) =
∫ z−∞ ϕ(t)dt
µ und σ sind Lage- und Formparameter der Dichtefunktion. Variation von µverschiebt den Graph auf der x-Achse, σ beschreibt die Breite.
Schiefe Verteilung Messwerte xi folgen einer schiefen Verteilung, danngibt der Median x einen zutreffenden, robusteren, empirischen Mittelwert an. Aufbeiden Seiten des Medians liegen gleichviele Messwerte. Mass fur die Schiefe:
γ =1
σ3E([X − µ]3
)
GenauigkeitsmasseInnere Genaugkeit Synonym fur Prazision. Zufallige Streuung. Mass furdie Reproduzierbarkeit.
Aussere Genauigkeit Berucksichtigung der systematischen Abweichun-gen.
Auflosung Kleinste Zahleinheit.
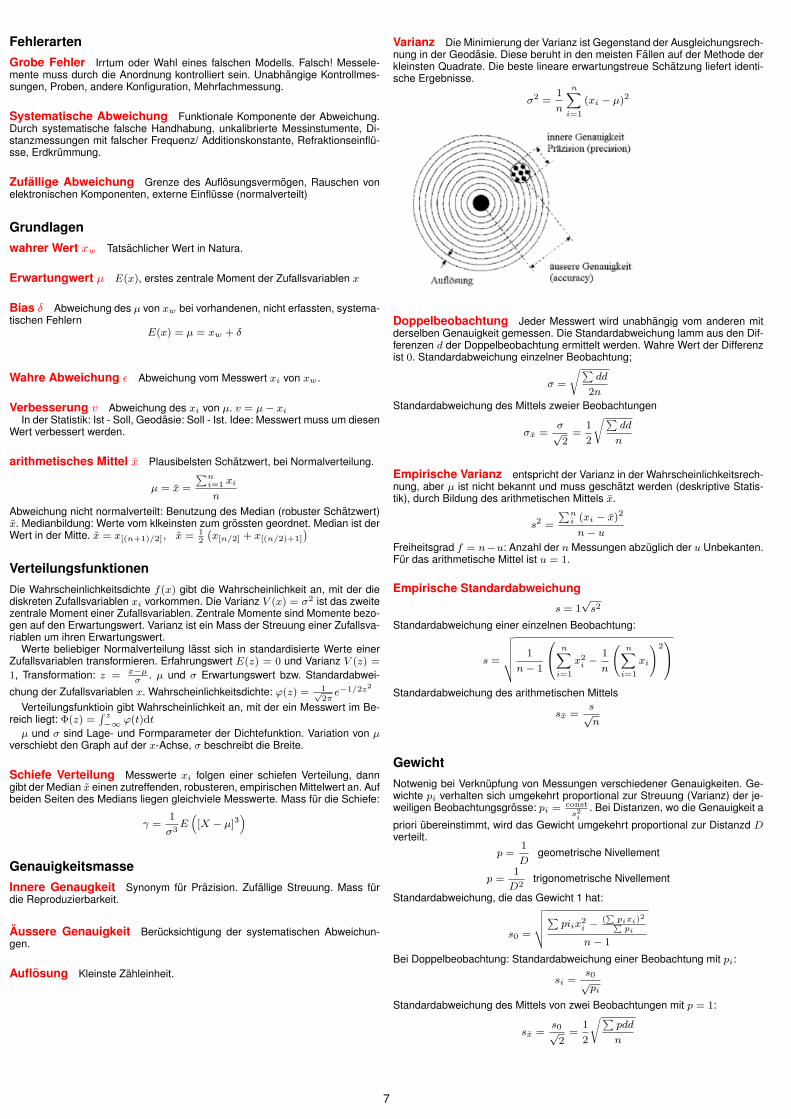
Varianz Die Minimierung der Varianz ist Gegenstand der Ausgleichungsrech-nung in der Geodasie. Diese beruht in den meisten Fallen auf der Methode derkleinsten Quadrate. Die beste lineare erwartungstreue Schatzung liefert identi-sche Ergebnisse.
σ2 =1
n
n∑i=1
(xi − µ)2
Doppelbeobachtung Jeder Messwert wird unabhangig vom anderen mitderselben Genauigkeit gemessen. Die Standardabweichung lamm aus den Dif-ferenzen d der Doppelbeobachtung ermittelt werden. Wahre Wert der Differenzist 0. Standardabweichung einzelner Beobachtung;
σ =
√∑dd
2n
Standardabweichung des Mittels zweier Beobachtungen
σx =σ√
2=
1
2
√∑dd
n
Empirische Varianz entspricht der Varianz in der Wahrscheinlichkeitsrech-nung, aber µ ist nicht bekannt und muss geschatzt werden (deskriptive Statis-tik), durch Bildung des arithmetischen Mittels x.
s2 =
∑ni (xi − x)2
n− u
Freiheitsgrad f = n−u: Anzahl der n Messungen abzuglich der u Unbekanten.Fur das arithmetische Mittel ist u = 1.
Empirische Standardabweichung
s = 1√
s2
Standardabweichung einer einzelnen Beobachtung:
s =
√√√√√ 1
n− 1
n∑i=1
x2i −
1
n
(n∑
i=1
xi
)2
Standardabweichung des arithmetischen Mittels
sx =s√
n
GewichtNotwenig bei Verknupfung von Messungen verschiedener Genauigkeiten. Ge-wichte pi verhalten sich umgekehrt proportional zur Streuung (Varianz) der je-weiligen Beobachtungsgrosse: pi = const
s2i
. Bei Distanzen, wo die Genauigkeit a
priori ubereinstimmt, wird das Gewicht umgekehrt proportional zur Distanzd Dverteilt.
p =1
Dgeometrische Nivellement
p =1
D2trigonometrische Nivellement
Standardabweichung, die das Gewicht 1 hat:
s0 =
√√√√∑piix2
i −(∑
pixi)2∑
pi
n− 1
Bei Doppelbeobachtung: Standardabweichung einer Beobachtung mit pi:
si =s0√pi
Standardabweichung des Mittels von zwei Beobachtungen mit p = 1:
sx =s0√2
=1
2
√∑pdd
n
7
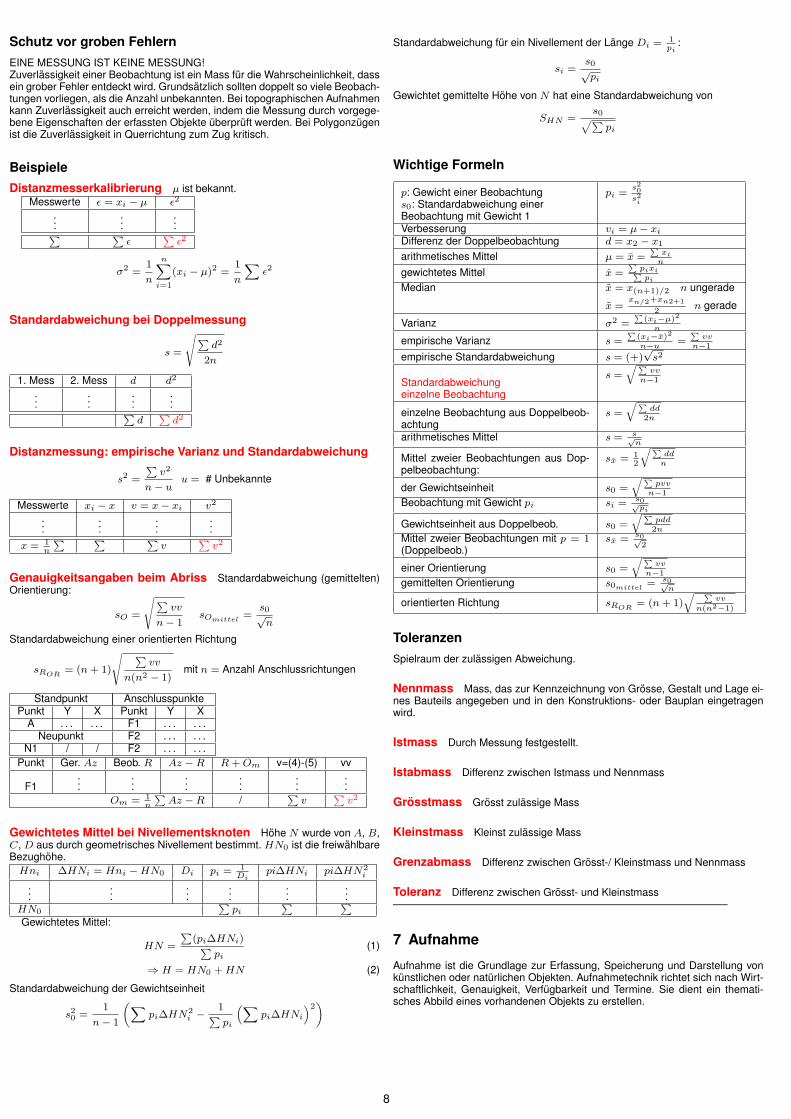
Schutz vor groben FehlernEINE MESSUNG IST KEINE MESSUNG!Zuverlassigkeit einer Beobachtung ist ein Mass fur die Wahrscheinlichkeit, dassein grober Fehler entdeckt wird. Grundsatzlich sollten doppelt so viele Beobach-tungen vorliegen, als die Anzahl unbekannten. Bei topographischen Aufnahmenkann Zuverlassigkeit auch erreicht werden, indem die Messung durch vorgege-bene Eigenschaften der erfassten Objekte uberpruft werden. Bei Polygonzugenist die Zuverlassigkeit in Querrichtung zum Zug kritisch.
BeispieleDistanzmesserkalibrierung µ ist bekannt.
Messwerte ε = xi − µ ε2
......
...∑ ∑ε
∑ε2
σ2 =1
n
n∑i=1
(xi − µ)2 =1
n
∑ε2
Standardabweichung bei Doppelmessung
s =
√∑d2
2n
1. Mess 2. Mess d d2
......
......∑
d∑
d2
Distanzmessung: empirische Varianz und Standardabweichung
s2 =
∑v2
n− uu = # Unbekannte
Messwerte xi − x v = x− xi v2
......
......
x = 1n
∑ ∑ ∑v
∑v2
Genauigkeitsangaben beim Abriss Standardabweichung (gemittelten)Orientierung:
sO =
√∑vv
n− 1sOmittel
=s0√n
Standardabweichung einer orientierten Richtung
sROR= (n + 1)
√ ∑vv
n(n2 − 1)mit n = Anzahl Anschlussrichtungen
Standpunkt AnschlusspunktePunkt Y X Punkt Y X
A . . . . . . F1 . . . . . .Neupunkt F2 . . . . . .
N1 / / F2 . . . . . .Punkt Ger. Az Beob. R Az −R R + Om v=(4)-(5) vv
F1...
......
......
...Om = 1
n
∑Az −R /
∑v
∑v2
Gewichtetes Mittel bei Nivellementsknoten Hohe N wurde von A, B,C, D aus durch geometrisches Nivellement bestimmt. HN0 ist die freiwahlbareBezughohe.
Hni ∆HNi = Hni −HN0 Di pi = 1Di
pi∆HNi pi∆HN2i
......
......
......
HN0∑
pi∑ ∑
Gewichtetes Mittel:
HN =
∑(pi∆HNi)∑
pi(1)
⇒ H = HN0 + HN (2)
Standardabweichung der Gewichtseinheit
s20 =
1
n− 1
(∑pi∆HN2
i −1∑pi
(∑pi∆HNi
)2)
Standardabweichung fur ein Nivellement der Lange Di = 1pi
:
si =s0√pi
Gewichtet gemittelte Hohe von N hat eine Standardabweichung von
SHN =s0√∑
pi
Wichtige Formeln
p: Gewicht einer Beobachtungs0: Standardabweichung einerBeobachtung mit Gewicht 1
pi =s20
s2i
Verbesserung vi = µ− xi
Differenz der Doppelbeobachtung d = x2 − x1
arithmetisches Mittel µ = x =∑
xin
gewichtetes Mittel x =∑
pixi∑pi
Median x = x(n+1)/2 n ungerade
x =xn/2+xn2+1
2n gerade
Varianz σ2 =∑
(xi−µ)2
n
empirische Varianz s =∑
(xi−x)2
n−u=
∑vv
n−1
empirische Standardabweichung s = (+)√
s2
Standardabweichungeinzelne Beobachtung
s =√∑
vvn−1
einzelne Beobachtung aus Doppelbeob-achtung
s =√∑
dd2n
arithmetisches Mittel s = s√n
Mittel zweier Beobachtungen aus Dop-pelbeobachtung:
sx = 12
√∑dd
n
der Gewichtseinheit s0 =√∑
pvvn−1
Beobachtung mit Gewicht pi si = s0√pi
Gewichtseinheit aus Doppelbeob. s0 =√∑
pdd2n
Mittel zweier Beobachtungen mit p = 1(Doppelbeob.)
sx = s0√2
einer Orientierung s0 =√∑
vvn−1
gemittelten Orientierung s0mittel= s0√
n
orientierten Richtung sROR= (n + 1)
√ ∑vv
n(n2−1)
ToleranzenSpielraum der zulassigen Abweichung.
Nennmass Mass, das zur Kennzeichnung von Grosse, Gestalt und Lage ei-nes Bauteils angegeben und in den Konstruktions- oder Bauplan eingetragenwird.
Istmass Durch Messung festgestellt.
Istabmass Differenz zwischen Istmass und Nennmass
Grosstmass Grosst zulassige Mass
Kleinstmass Kleinst zulassige Mass
Grenzabmass Differenz zwischen Grosst-/ Kleinstmass und Nennmass
Toleranz Differenz zwischen Grosst- und Kleinstmass———————————————————————————————–
7 Aufnahme
Aufnahme ist die Grundlage zur Erfassung, Speicherung und Darstellung vonkunstlichen oder naturlichen Objekten. Aufnahmetechnik richtet sich nach Wirt-schaftlichkeit, Genauigkeit, Verfugbarkeit und Termine. Sie dient ein themati-sches Abbild eines vorhandenen Objekts zu erstellen.
8
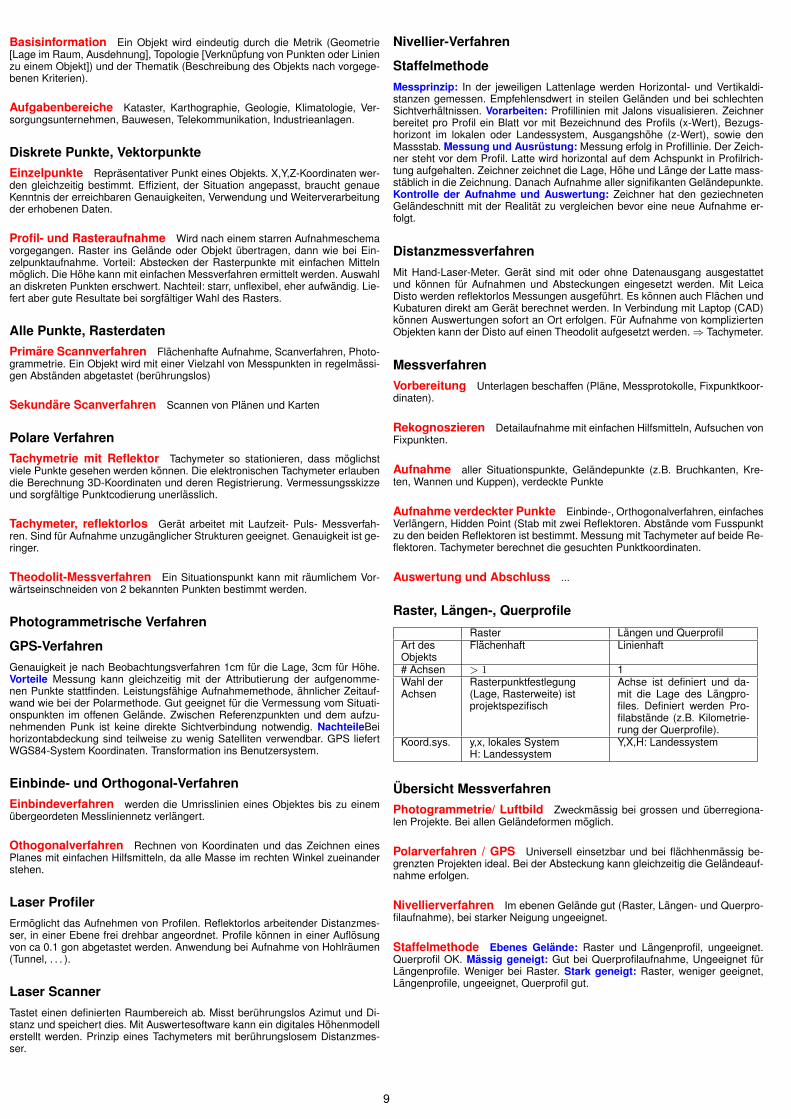
Basisinformation Ein Objekt wird eindeutig durch die Metrik (Geometrie[Lage im Raum, Ausdehnung], Topologie [Verknupfung von Punkten oder Linienzu einem Objekt]) und der Thematik (Beschreibung des Objekts nach vorgege-benen Kriterien).
Aufgabenbereiche Kataster, Karthographie, Geologie, Klimatologie, Ver-sorgungsunternehmen, Bauwesen, Telekommunikation, Industrieanlagen.
Diskrete Punkte, VektorpunkteEinzelpunkte Reprasentativer Punkt eines Objekts. X,Y,Z-Koordinaten wer-den gleichzeitig bestimmt. Effizient, der Situation angepasst, braucht genaueKenntnis der erreichbaren Genauigkeiten, Verwendung und Weiterverarbeitungder erhobenen Daten.
Profil- und Rasteraufnahme Wird nach einem starren Aufnahmeschemavorgegangen. Raster ins Gelande oder Objekt ubertragen, dann wie bei Ein-zelpunktaufnahme. Vorteil: Abstecken der Rasterpunkte mit einfachen Mittelnmoglich. Die Hohe kann mit einfachen Messverfahren ermittelt werden. Auswahlan diskreten Punkten erschwert. Nachteil: starr, unflexibel, eher aufwandig. Lie-fert aber gute Resultate bei sorgfaltiger Wahl des Rasters.
Alle Punkte, RasterdatenPrimare Scannverfahren Flachenhafte Aufnahme, Scanverfahren, Photo-grammetrie. Ein Objekt wird mit einer Vielzahl von Messpunkten in regelmassi-gen Abstanden abgetastet (beruhrungslos)
Sekundare Scanverfahren Scannen von Planen und Karten
Polare VerfahrenTachymetrie mit Reflektor Tachymeter so stationieren, dass moglichstviele Punkte gesehen werden konnen. Die elektronischen Tachymeter erlaubendie Berechnung 3D-Koordinaten und deren Registrierung. Vermessungsskizzeund sorgfaltige Punktcodierung unerlasslich.
Tachymeter, reflektorlos Gerat arbeitet mit Laufzeit- Puls- Messverfah-ren. Sind fur Aufnahme unzuganglicher Strukturen geeignet. Genauigkeit ist ge-ringer.
Theodolit-Messverfahren Ein Situationspunkt kann mit raumlichem Vor-wartseinschneiden von 2 bekannten Punkten bestimmt werden.
Photogrammetrische Verfahren
GPS-VerfahrenGenauigkeit je nach Beobachtungsverfahren 1cm fur die Lage, 3cm fur Hohe.Vorteile Messung kann gleichzeitig mit der Attributierung der aufgenomme-nen Punkte stattfinden. Leistungsfahige Aufnahmemethode, ahnlicher Zeitauf-wand wie bei der Polarmethode. Gut geeignet fur die Vermessung vom Situati-onspunkten im offenen Gelande. Zwischen Referenzpunkten und dem aufzu-nehmenden Punk ist keine direkte Sichtverbindung notwendig. NachteileBeihorizontabdeckung sind teilweise zu wenig Satelliten verwendbar. GPS liefertWGS84-System Koordinaten. Transformation ins Benutzersystem.
Einbinde- und Orthogonal-VerfahrenEinbindeverfahren werden die Umrisslinien eines Objektes bis zu einemubergeordeten Messliniennetz verlangert.
Othogonalverfahren Rechnen von Koordinaten und das Zeichnen einesPlanes mit einfachen Hilfsmitteln, da alle Masse im rechten Winkel zueinanderstehen.
Laser ProfilerErmoglicht das Aufnehmen von Profilen. Reflektorlos arbeitender Distanzmes-ser, in einer Ebene frei drehbar angeordnet. Profile konnen in einer Auflosungvon ca 0.1 gon abgetastet werden. Anwendung bei Aufnahme von Hohlraumen(Tunnel, . . . ).
Laser ScannerTastet einen definierten Raumbereich ab. Misst beruhrungslos Azimut und Di-stanz und speichert dies. Mit Auswertesoftware kann ein digitales Hohenmodellerstellt werden. Prinzip eines Tachymeters mit beruhrungslosem Distanzmes-ser.
Nivellier-Verfahren
StaffelmethodeMessprinzip: In der jeweiligen Lattenlage werden Horizontal- und Vertikaldi-stanzen gemessen. Empfehlensdwert in steilen Gelanden und bei schlechtenSichtverhaltnissen. Vorarbeiten: Profillinien mit Jalons visualisieren. Zeichnerbereitet pro Profil ein Blatt vor mit Bezeichnund des Profils (x-Wert), Bezugs-horizont im lokalen oder Landessystem, Ausgangshohe (z-Wert), sowie denMassstab. Messung und Ausrustung: Messung erfolg in Profillinie. Der Zeich-ner steht vor dem Profil. Latte wird horizontal auf dem Achspunkt in Profilrich-tung aufgehalten. Zeichner zeichnet die Lage, Hohe und Lange der Latte mass-stablich in die Zeichnung. Danach Aufnahme aller signifikanten Gelandepunkte.Kontrolle der Aufnahme und Auswertung: Zeichner hat den geziechnetenGelandeschnitt mit der Realitat zu vergleichen bevor eine neue Aufnahme er-folgt.
DistanzmessverfahrenMit Hand-Laser-Meter. Gerat sind mit oder ohne Datenausgang ausgestattetund konnen fur Aufnahmen und Absteckungen eingesetzt werden. Mit LeicaDisto werden reflektorlos Messungen ausgefuhrt. Es konnen auch Flachen undKubaturen direkt am Gerat berechnet werden. In Verbindung mit Laptop (CAD)konnen Auswertungen sofort an Ort erfolgen. Fur Aufnahme von kompliziertenObjekten kann der Disto auf einen Theodolit aufgesetzt werden.⇒ Tachymeter.
MessverfahrenVorbereitung Unterlagen beschaffen (Plane, Messprotokolle, Fixpunktkoor-dinaten).
Rekognoszieren Detailaufnahme mit einfachen Hilfsmitteln, Aufsuchen vonFixpunkten.
Aufnahme aller Situationspunkte, Gelandepunkte (z.B. Bruchkanten, Kre-ten, Wannen und Kuppen), verdeckte Punkte
Aufnahme verdeckter Punkte Einbinde-, Orthogonalverfahren, einfachesVerlangern, Hidden Point (Stab mit zwei Reflektoren. Abstande vom Fusspunktzu den beiden Reflektoren ist bestimmt. Messung mit Tachymeter auf beide Re-flektoren. Tachymeter berechnet die gesuchten Punktkoordinaten.
Auswertung und Abschluss ...
Raster, Langen-, Querprofile
Raster Langen und QuerprofilArt desObjekts
Flachenhaft Linienhaft
# Achsen > 1 1Wahl derAchsen
Rasterpunktfestlegung(Lage, Rasterweite) istprojektspezifisch
Achse ist definiert und da-mit die Lage des Langpro-files. Definiert werden Pro-filabstande (z.B. Kilometrie-rung der Querprofile).
Koord.sys. y,x, lokales SystemH: Landessystem
Y,X,H: Landessystem
Ubersicht MessverfahrenPhotogrammetrie/ Luftbild Zweckmassig bei grossen und uberregiona-len Projekte. Bei allen Gelandeformen moglich.
Polarverfahren / GPS Universell einsetzbar und bei flachhenmassig be-grenzten Projekten ideal. Bei der Absteckung kann gleichzeitig die Gelandeauf-nahme erfolgen.
Nivellierverfahren Im ebenen Gelande gut (Raster, Langen- und Querpro-filaufnahme), bei starker Neigung ungeeignet.
Staffelmethode Ebenes Gelande: Raster und Langenprofil, ungeeignet.Querprofil OK. Massig geneigt: Gut bei Querprofilaufnahme, Ungeeignet furLangenprofile. Weniger bei Raster. Stark geneigt: Raster, weniger geeignet,Langenprofile, ungeeignet, Querprofil gut.
9
Rasteraufnahmesind Aufnahmen von Gelandeschnitten, die rechtwinklig zueinander stehen undsich schneiden. Rastermaschen konnen quadratisch oder rechteckig sein. In derRegel werden nur die Hohen der Rasterpunkte bestimmt (Koordinatensystemeindeutig).
Polares Verfahren, Vorgehen Lokales System: Rasterpunkt sowie Ras-terrichtung oder zweiten Eckpunkt abstecken. Tachymeter auf Eckpunkt statio-nieren und Teilkreis auf die abgesteckte Richtung orientieren. Rasterpunkte ab-stecken und Gelandehohe bestimmen. Mit GPS ahnliches Verfahren.
Nivellierverfahren Messgerat: Nivellier oder Rotationslaser. Raster abste-cken und mit Jalons sersichern. Abgesteckte Linien sollen in der FAlllinie desGelandes liegen.
Kontrolle Doppelaufnahme, Stickproben, Konstruktion der Hohenlinien di-rekt im Feld, visueller Vergleich.
LangenprofilaufnahmeBeschreibt den Gelandeverlauf in der Projektachse. Hohen in den Profilpunktenbestimmt.
Messverfahren wird durch Grosse des Objekts und der Gelandeform be-stimmt. Bei Absteckung der Profilpunkte: GPS, Polar. Liniennivellement kannbei passender Gelandeform sinnvoll sein.
Kontrolle Doppelaufnahme, Anschluss an weitere hohenmassig bekanntePunkte.
Querprofilliegen immer im rechten Winkel zur Tangende an die Projektachse. DetaillierteAufnahme. Soll auch das Gelande zwischen benachtbarten Profilen reprasen-tieren.
Polares Verfahren/ GPS Langs- und Querprofile konnen gleichzeitig auf-genommen werden.
Nivellierverfahren Arbeit mit dem Instrumentenhorizont. Das Profil kannauch direkt im Feld gezeichnet werden.
Staffelmethode ...
Kontrolle Doppelaufnahme von markanten Punkten, Feldvergleich nach derAuswertung. Visuelle Kontrolle.
Amtliche VermessungGrundlagenerstellung fur das eidgenossische Grundbuch. Grundlage fur die Er-fassung von Daten und zum Erstellen von Planen. Daten der AV liegen in gra-phischer und numerischer Form vor, als auch im GIS. In Zukunft sind die Datennur noch in GIS-Form zu finden. Alle Daten sind offentlich. Plane der AV werdenpermanent nachgefuhrt.
Layer Um nach AV93 erhobene Daten in RIS (Relational Interface System)abzulegen, wurde in der Technischen Verordnung der Amtlichen Vermessung(TVAV) 8 Ebenen vorgeschrieben. Fixpunkte, Bodenbedeckung, Einzelobjeke/Linienelemente, Hohen, Monenklatur, Liegenschaften, Rohrleitungen, Adminis-trative und Technische Einteilung.
Messverfahren Polar, in Kombination mit Einbinde- und Orthogonalverfah-ren, Photogrammetrisch, GPS.
Bezugssystem Landeskoordinaten.
Darstellung Grundbuch: Situations- und Eigentumsgrenzen, lagerichtig,Massstabe 1:250-1:2000. Ubersicht: Situation und Topographie. Massstabe1:2500: lagerichtig, 1:5000,1:10000: generalisiert.
LeitungsaufnahmeFur Unterhalt von Versorgungsanlagen ist die genaue Lage (Y,X,Z) von Leitun-gen unerlasslich. Verwaltet werden die Daten in Leitungskatastern, die neu nurnoch auf GIS oder CAD basierend erstellt werden.
Messverfahren Polar, Anwendung des Hidden-Point Stab, ev. in Kombina-tion mit GPS, in Anlagen mit Photogrammetrie. Ortungsgerate zur Detektionunterirdischer Leitungen
Bezugssystem Landeskoordinaten, lokale Bezugssysteme.
Darstellung Situations und Eigentumsgrenzen, lagerichtig, inkl. Beschrei-bung der Hohenlage der Leitungen. Masstabe 1:50 bis 1:2000.
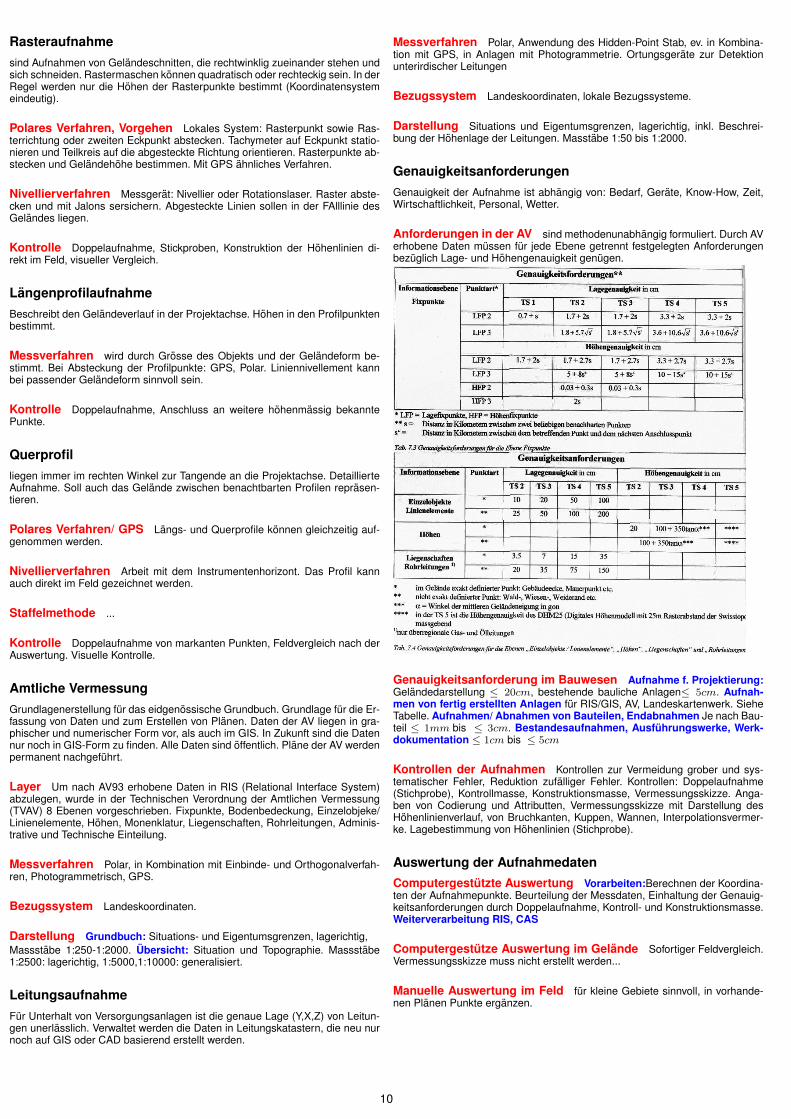
GenauigkeitsanforderungenGenauigkeit der Aufnahme ist abhangig von: Bedarf, Gerate, Know-How, Zeit,Wirtschaftlichkeit, Personal, Wetter.
Anforderungen in der AV sind methodenunabhangig formuliert. Durch AVerhobene Daten mussen fur jede Ebene getrennt festgelegten Anforderungenbezuglich Lage- und Hohengenauigkeit genugen.
Genauigkeitsanforderung im Bauwesen Aufnahme f. Projektierung:Gelandedarstellung ≤ 20cm, bestehende bauliche Anlagen≤ 5cm. Aufnah-men von fertig erstellten Anlagen fur RIS/GIS, AV, Landeskartenwerk. SieheTabelle. Aufnahmen/ Abnahmen von Bauteilen, Endabnahmen Je nach Bau-teil ≤ 1mm bis ≤ 3cm. Bestandesaufnahmen, Ausfuhrungswerke, Werk-dokumentation ≤ 1cm bis ≤ 5cm
Kontrollen der Aufnahmen Kontrollen zur Vermeidung grober und sys-tematischer Fehler, Reduktion zufalliger Fehler. Kontrollen: Doppelaufnahme(Stichprobe), Kontrollmasse, Konstruktionsmasse, Vermessungsskizze. Anga-ben von Codierung und Attributten, Vermessungsskizze mit Darstellung desHohenlinienverlauf, von Bruchkanten, Kuppen, Wannen, Interpolationsvermer-ke. Lagebestimmung von Hohenlinien (Stichprobe).
Auswertung der AufnahmedatenComputergestutzte Auswertung Vorarbeiten:Berechnen der Koordina-ten der Aufnahmepunkte. Beurteilung der Messdaten, Einhaltung der Genauig-keitsanforderungen durch Doppelaufnahme, Kontroll- und Konstruktionsmasse.Weiterverarbeitung RIS, CAS
Computergestutze Auswertung im Gelande Sofortiger Feldvergleich.Vermessungsskizze muss nicht erstellt werden...
Manuelle Auswertung im Feld fur kleine Gebiete sinnvoll, in vorhande-nen Planen Punkte erganzen.
10
Polare Aufnahme Aufnahme eines Fixpunktes und Teilkreis darauf orientie-ren. Kontrolle weiteren Fixpunkt anzielen und Messung auf Plan kontrollieren.Aufnahme der Detailpunkte.
Konstruktion der Gelandeform rechnerisch mit dem Strahlensatz: di =dAB
∆HABδhi. graphisch mit transparentem Millimeterpapier. mit direkt aufgenom-
menen Hohenlinien: genauste Methode, aufwendig → Kote der aufzunehmen-den Hohenlinie und Hohenunterschied δh zwischen Kote und Station ist be-kannt, Reflektor wird in der Nahe der gesuchten Hohenlinie aufgestellt, Stationzeigt Hohenunterschied an. Korrekturwert ∆hist − δhsoll + I − S, wird uber-mittelt und Reflektor entsprechend versetzt.
Darstellungsformen von Informationen in Karten undPlanenSituation und Topographie Topographie: Darstellungsform der drittenDimension: Hohenlinien, Zwischenlinien, kotierte Punkte, Schraffen. Situation:Objekte tatsachlicher Natur (Bodenbedeckung, Vegetation, Bauten), Vermes-sungspunkte, immaterielle Objekte (Parzellen- und Gemeindegrenzen)
Hohenlinien Schichtlinien, Niveaukurven oder Isohypsen → Aquidistanz:
∆H =m
1000
m: Massstab
Schraffen fur Boschungen verwendet.
Zwischenlinien Wenn die Gelandeform zwischen Hohenlinien nicht sym-metrisch ist.
Beschriftung bestehende Gelandehohen werden kursiv geschrieben, Pro-jekthohen normal, jede eingefuhrte Linie wird beschriftet, Hohenangaben Fix-punkte auf cm, nicht eindeutig definierte Punkte auf dm, eindeutig definiertePunkte auf cm.
Plan Darstellung lagetreu teilweise generalisiert. 1:2’500- 1:10’000.
Karte Nicht lagetreu. Stark generalisiert: > 1:25’000
Das digitale Gelandemodell Uber Koordinaten X, Y und H digital be-schrieben. DHM: digitales Hohenmodell, DEM: digit. Elevations Modell , DTM:Digital Terrain Modell.
Punktarten Punktdaten welche nur Lage- und Hoheninformationen beinhal-ten und solche welche Zusatzinfo (Topographie) enthalten
Begriffe Markante Punkte Kuppen, Mulden; Gelandelinie Verbind-ung vonEinzelpunkten (1. harte Bruchkanten, so dass Hohenlinien gebrochen werden;2. weiche Struckturlinien, Hohenkurven werden bei Gelandebruchen ausgerun-det); Bruchkanten Zusatzinfos; Grat- und Tallinien spez. Bruchkanten, be-schreiben Zusammenstossen von zwei Teilflachen entlang der Falllinie; Struk-turlinie unscharfer Ubergang zwischen verschieden geneigten Teilflachen; Fall-linie Verlauf der grossten Flachenneigung, Vermaschung Verbindung von ein-zelnen Punktdaten zu kleinen geschlossenen Flachen; DHM 25 DHM mit Ras-terabstand 25m, ausreichend fur Arbeiten in den Projektstufen.
Theorie der Gelandemodelle Dreiecksvermaschung Dreieck wird auf-gebaut, wenn der Umkreis von drei Gelandepunkten keine weiteren Punktebeinhaltet, rechenintensiv, Vermaschung darf keine Gelandebruchlinien schnei-den.———————————————————————————————–
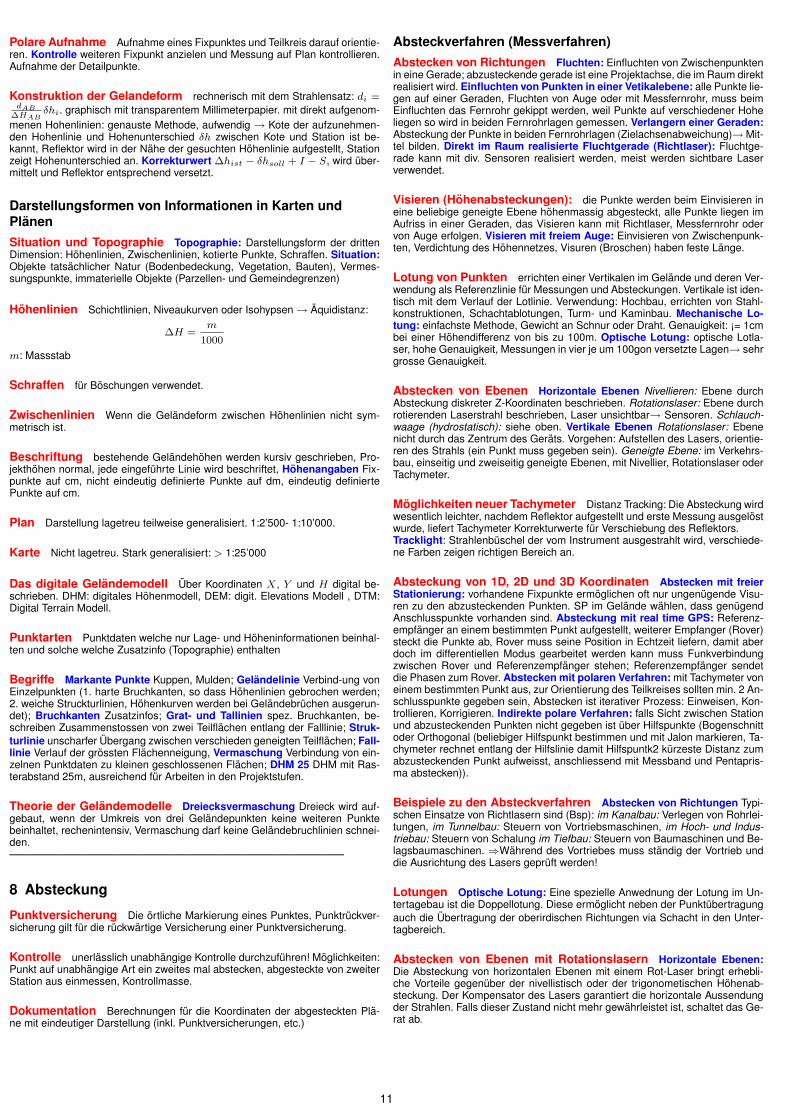
8 Absteckung
Punktversicherung Die ortliche Markierung eines Punktes, Punktruckver-sicherung gilt fur die ruckwartige Versicherung einer Punktversicherung.
Kontrolle unerlasslich unabhangige Kontrolle durchzufuhren! Moglichkeiten:Punkt auf unabhangige Art ein zweites mal abstecken, abgesteckte von zweiterStation aus einmessen, Kontrollmasse.
Dokumentation Berechnungen fur die Koordinaten der abgesteckten Pla-ne mit eindeutiger Darstellung (inkl. Punktversicherungen, etc.)
Absteckverfahren (Messverfahren)Abstecken von Richtungen Fluchten: Einfluchten von Zwischenpunktenin eine Gerade; abzusteckende gerade ist eine Projektachse, die im Raum direktrealisiert wird. Einfluchten von Punkten in einer Vetikalebene: alle Punkte lie-gen auf einer Geraden, Fluchten von Auge oder mit Messfernrohr, muss beimEinfluchten das Fernrohr gekippt werden, weil Punkte auf verschiedener Hoheliegen so wird in beiden Fernrohrlagen gemessen. Verlangern einer Geraden:Absteckung der Punkte in beiden Fernrohrlagen (Zielachsenabweichung)→Mit-tel bilden. Direkt im Raum realisierte Fluchtgerade (Richtlaser): Fluchtge-rade kann mit div. Sensoren realisiert werden, meist werden sichtbare Laserverwendet.
Visieren (Hohenabsteckungen): die Punkte werden beim Einvisieren ineine beliebige geneigte Ebene hohenmassig abgesteckt, alle Punkte liegen imAufriss in einer Geraden, das Visieren kann mit Richtlaser, Messfernrohr odervon Auge erfolgen. Visieren mit freiem Auge: Einvisieren von Zwischenpunk-ten, Verdichtung des Hohennetzes, Visuren (Broschen) haben feste Lange.
Lotung von Punkten errichten einer Vertikalen im Gelande und deren Ver-wendung als Referenzlinie fur Messungen und Absteckungen. Vertikale ist iden-tisch mit dem Verlauf der Lotlinie. Verwendung: Hochbau, errichten von Stahl-konstruktionen, Schachtablotungen, Turm- und Kaminbau. Mechanische Lo-tung: einfachste Methode, Gewicht an Schnur oder Draht. Genauigkeit: ¡= 1cmbei einer Hohendifferenz von bis zu 100m. Optische Lotung: optische Lotla-ser, hohe Genauigkeit, Messungen in vier je um 100gon versetzte Lagen→ sehrgrosse Genauigkeit.
Abstecken von Ebenen Horizontale Ebenen Nivellieren: Ebene durchAbsteckung diskreter Z-Koordinaten beschrieben. Rotationslaser: Ebene durchrotierenden Laserstrahl beschrieben, Laser unsichtbar→ Sensoren. Schlauch-waage (hydrostatisch): siehe oben. Vertikale Ebenen Rotationslaser: Ebenenicht durch das Zentrum des Gerats. Vorgehen: Aufstellen des Lasers, orientie-ren des Strahls (ein Punkt muss gegeben sein). Geneigte Ebene: im Verkehrs-bau, einseitig und zweiseitig geneigte Ebenen, mit Nivellier, Rotationslaser oderTachymeter.
Moglichkeiten neuer Tachymeter Distanz Tracking: Die Absteckung wirdwesentlich leichter, nachdem Reflektor aufgestellt und erste Messung ausgelostwurde, liefert Tachymeter Korrekturwerte fur Verschiebung des Reflektors.Tracklight: Strahlenbuschel der vom Instrument ausgestrahlt wird, verschiede-ne Farben zeigen richtigen Bereich an.
Absteckung von 1D, 2D und 3D Koordinaten Abstecken mit freierStationierung: vorhandene Fixpunkte ermoglichen oft nur ungenugende Visu-ren zu den abzusteckenden Punkten. SP im Gelande wahlen, dass genugendAnschlusspunkte vorhanden sind. Absteckung mit real time GPS: Referenz-empfanger an einem bestimmten Punkt aufgestellt, weiterer Empfanger (Rover)steckt die Punkte ab, Rover muss seine Position in Echtzeit liefern, damit aberdoch im differentiellen Modus gearbeitet werden kann muss Funkverbindungzwischen Rover und Referenzempfanger stehen; Referenzempfanger sendetdie Phasen zum Rover. Abstecken mit polaren Verfahren: mit Tachymeter voneinem bestimmten Punkt aus, zur Orientierung des Teilkreises sollten min. 2 An-schlusspunkte gegeben sein, Abstecken ist iterativer Prozess: Einweisen, Kon-trollieren, Korrigieren. Indirekte polare Verfahren: falls Sicht zwischen Stationund abzusteckenden Punkten nicht gegeben ist uber Hilfspunkte (Bogenschnittoder Orthogonal (beliebiger Hilfspunkt bestimmen und mit Jalon markieren, Ta-chymeter rechnet entlang der Hilfslinie damit Hilfspuntk2 kurzeste Distanz zumabzusteckenden Punkt aufweisst, anschliessend mit Messband und Pentapris-ma abstecken)).
Beispiele zu den Absteckverfahren Abstecken von Richtungen Typi-schen Einsatze von Richtlasern sind (Bsp): im Kanalbau: Verlegen von Rohrlei-tungen, im Tunnelbau: Steuern von Vortriebsmaschinen, im Hoch- und Indus-triebau: Steuern von Schalung im Tiefbau: Steuern von Baumaschinen und Be-lagsbaumaschinen. ⇒Wahrend des Vortriebes muss standig der Vortrieb unddie Ausrichtung des Lasers gepruft werden!
Lotungen Optische Lotung: Eine spezielle Anwednung der Lotung im Un-tertagebau ist die Doppellotung. Diese ermoglicht neben der Punktubertragungauch die Ubertragung der oberirdischen Richtungen via Schacht in den Unter-tagbereich.
Abstecken von Ebenen mit Rotationslasern Horizontale Ebenen:Die Absteckung von horizontalen Ebenen mit einem Rot-Laser bringt erhebli-che Vorteile gegenuber der nivellistisch oder der trigonometischen Hohenab-steckung. Der Kompensator des Lasers garantiert die horizontale Aussendungder Strahlen. Falls dieser Zustand nicht mehr gewahrleistet ist, schaltet das Ge-rat ab.
11
Abstecken von 1D-, 2D- und 3D-Koordinaten im Hochbau Hohen-ubertragung im Hochbau: Falls Hohen in allgemeinen Hochbauten ubertra-gen oder kontrolliert werden sollen, so sind die Genaugkeitsanforderungen ≥1 cm Einsatz Nivellier: Geometrisches Nivellement uber das Treppenhaus mitmoglichst langen Nivellierlatten. Oder Hohehnubertragung uber Aussenfassa-de mit Teleskopstecklatten oder bei grossen Hohenunterschieden mit einemberuhrungslos aufgehangtem Messband (50 N eingepsannt). Einsatz elektro-nischer Tachymeter: Die Reflektorhohen werden zweck-massig auf die Instru-mentenhohe eingestellt, die Distanz D kann beliebig gewahlt werden. Mit Hilfeder Distanz zu den Reflektoren erhalt man die Hohendifferenzen bezuglich derKippachse des Tachymeters.
Absteckung im allg. Hochbau, 2D Koordinaten Schnurgerust: aus-serhalb der Baugrube, auf dem die Bauachsen versichert sind, zwischen Versi-cherungen werden Schnure gespannt um Achsen zu visualisieren. Zustandig-keiten: Bauherrschaft / Bauleitung: Absteckung der Hauptachsen, Versicherungvon Hohenfixpunkten, bei grossen Objekten auch die Lagefix Punkte; Unter-nehmen: erstellen der Schnurgeruste, Sekundarachsen, Profilierungsarbeiten,Erhaltung der Fixpunkte Vorgehen: Bauleitung legt im Einvernehmen mit demUnternehmen Hauptachsen fest; die Achsen werden auf dem Schnurgerust ver-sichert; Absteckung ist der Baupolizei zu melden; Ubergabe der Absteckung andas Unternehmen. Meist fuhrt die Absteckung ein kommunaler Vermessungs-dienst aus (im Auftrag der Bauleitung und der Baupolizei, Kontrollmechanis-men unabdingbar). Anforderungen: Schnurgerust muss stabil sein, die Laden(Schalbretter) sollen horizontal und rechtwinklig zueinander sein, Achsen mitFarbe kennzeichnen und beschriften, im Absteckungsplan muss Lage Orien-tierung und Form des Bauwerks eindeutig definiert sein. Messverfahren: Po-lare oder GPS Verfahren (GPS eingeschrankt, da Verbindung zu Satelliten inUberbauung nicht immer gewahrleistet) Polares Verfahren mit Tachymeter mitintegrierter Software: Wahl der Station, Anschlusspunkte berucksichtigen; ab-stecken der Bauachsen: zwei Punkte auf Schnurgerust aufmessen, Programmrechnet dann beide Verschiebungsmasse zur Achse. Tachymeter ohne Rech-nerunterstutzung: benotigt werden Standpunktkoord. sowie weitere bekanntePunkte zur Orientierung des Teilkreises. Vorgehen: Stationspunkt wird als Ur-sprung eines lokalen Koordinatensystems gewahlt, Transformation der Datenins lokale System (wenn Bauachsen parallel, nur eine Gebaudeecke definieren),Absteckung von Station aus: Orientierung des Teilkreises (bekannten Punkt an-zielen und am Teilkreis Azimutwert einstellen, danach Kontrolle), Alhidade dre-hen bis Kreisstelle dem Azimut der Achse entspricht, Orientierung des Teilkrei-ses auf 0.00gon in dieser Position, Absteckung kann nun beginnen, Reflektorauf Messpunkt stellen, Teilkreis zeigt Richtung im lokalen System an.———————————————————————————————–
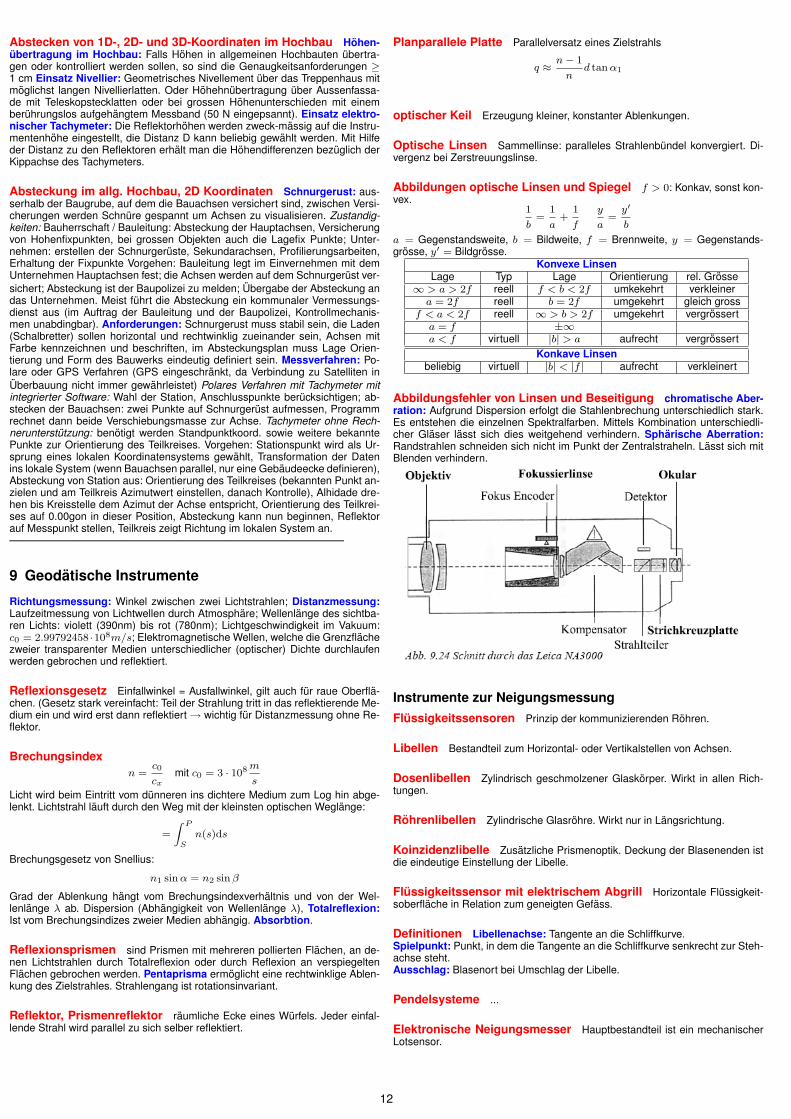
9 Geodatische Instrumente
Richtungsmessung: Winkel zwischen zwei Lichtstrahlen; Distanzmessung:Laufzeitmessung von Lichtwellen durch Atmosphare; Wellenlange des sichtba-ren Lichts: violett (390nm) bis rot (780nm); Lichtgeschwindigkeit im Vakuum:c0 = 2.99792458 ·108m/s; Elektromagnetische Wellen, welche die Grenzflachezweier transparenter Medien unterschiedlicher (optischer) Dichte durchlaufenwerden gebrochen und reflektiert.
Reflexionsgesetz Einfallwinkel = Ausfallwinkel, gilt auch fur raue Oberfla-chen. (Gesetz stark vereinfacht: Teil der Strahlung tritt in das reflektierende Me-dium ein und wird erst dann reflektiert → wichtig fur Distanzmessung ohne Re-flektor.
Brechungsindexn =
c0
cxmit c0 = 3 · 108 m
s
Licht wird beim Eintritt vom dunneren ins dichtere Medium zum Log hin abge-lenkt. Lichtstrahl lauft durch den Weg mit der kleinsten optischen Weglange:
=
∫ P
Sn(s)ds
Brechungsgesetz von Snellius:
n1 sin α = n2 sin β
Grad der Ablenkung hangt vom Brechungsindexverhaltnis und von der Wel-lenlange λ ab. Dispersion (Abhangigkeit von Wellenlange λ), Totalreflexion:Ist vom Brechungsindizes zweier Medien abhangig. Absorbtion.
Reflexionsprismen sind Prismen mit mehreren pollierten Flachen, an de-nen Lichtstrahlen durch Totalreflexion oder durch Reflexion an verspiegeltenFlachen gebrochen werden. Pentaprisma ermoglicht eine rechtwinklige Ablen-kung des Zielstrahles. Strahlengang ist rotationsinvariant.
Reflektor, Prismenreflektor raumliche Ecke eines Wurfels. Jeder einfal-lende Strahl wird parallel zu sich selber reflektiert.
Planparallele Platte Parallelversatz eines Zielstrahls
q ≈n− 1
nd tan α1
optischer Keil Erzeugung kleiner, konstanter Ablenkungen.
Optische Linsen Sammellinse: paralleles Strahlenbundel konvergiert. Di-vergenz bei Zerstreuungslinse.
Abbildungen optische Linsen und Spiegel f > 0: Konkav, sonst kon-vex.
1
b=
1
a+
1
f
y
a=
y′
b
a = Gegenstandsweite, b = Bildweite, f = Brennweite, y = Gegenstands-grosse, y′ = Bildgrosse.
Konvexe LinsenLage Typ Lage Orientierung rel. Grosse
∞ > a > 2f reell f < b < 2f umkekehrt verkleinera = 2f reell b = 2f umgekehrt gleich gross
f < a < 2f reell ∞ > b > 2f umgekehrt vergrosserta = f ±∞a < f virtuell |b| > a aufrecht vergrossert
Konkave Linsenbeliebig virtuell |b| < |f | aufrecht verkleinert
Abbildungsfehler von Linsen und Beseitigung chromatische Aber-ration: Aufgrund Dispersion erfolgt die Stahlenbrechung unterschiedlich stark.Es entstehen die einzelnen Spektralfarben. Mittels Kombination unterschiedli-cher Glaser lasst sich dies weitgehend verhindern. Spharische Aberration:Randstrahlen schneiden sich nicht im Punkt der Zentralstraheln. Lasst sich mitBlenden verhindern.
Instrumente zur NeigungsmessungFlussigkeitssensoren Prinzip der kommunizierenden Rohren.
Libellen Bestandteil zum Horizontal- oder Vertikalstellen von Achsen.
Dosenlibellen Zylindrisch geschmolzener Glaskorper. Wirkt in allen Rich-tungen.
Rohrenlibellen Zylindrische Glasrohre. Wirkt nur in Langsrichtung.
Koinzidenzlibelle Zusatzliche Prismenoptik. Deckung der Blasenenden istdie eindeutige Einstellung der Libelle.
Flussigkeitssensor mit elektrischem Abgrill Horizontale Flussigkeit-soberflache in Relation zum geneigten Gefass.
Definitionen Libellenachse: Tangente an die Schliffkurve.Spielpunkt: Punkt, in dem die Tangente an die Schliffkurve senkrecht zur Steh-achse steht.Ausschlag: Blasenort bei Umschlag der Libelle.
Pendelsysteme ...
Elektronische Neigungsmesser Hauptbestandteil ist ein mechanischerLotsensor.
12

NivellierinstrumenteNivelliere mit Rohrenlibelle Hat einfach eine Libelle fur die Horizontie-rung. Geringe Abhangigkeit von elektrischen und magnetischen Feldern.
Komensatornivelliere Einfluss kleiner Neigungen der optischen Achse aufdie Auslenkung des Zielstrahls ausschalten.
Digitalnivelliere Optisch: Kompensatornivellier.
Rotationslasernivellier ...
NivellierverfahrenNivellierprobe aus der Mitte und Exzentrisch Fester Hohenuntersx-chied wird zweimal gemessen. Einmal aus der Mitte, einmal Exzentrisch. EineZielachsabweichung α wirkt sich aus der Mitte bei Ruck- und Vorblick gleichaus.
Punkt R V R-V Distanz Instr.B 1.732 21m MitteA 1.058 +0.674 21mB 1.687 2m MitteA 1.015 +0.672 44m
+2mmZielachse um +2mm/42 Meter geneigt
Nivellierprobe nach Nabauer Bei ”aus der Mitte und Exzentrsich“ mussumfokusiert werden. Dies wird hier minimiert.
a2 = a1 − b1 + 2∆ + b2 ⇒ ∆ = 0
nach Forstner Gleich wie bei Nabauer, Instrument und Latte vertauscht.
Justierung eines Rotationsnivelliers vier jeweils um 100gon gedrehteund gleich entfernte Latten, Sensoren werden mit vom Rotationsnivellier erzeug-ten Ebene in Schnitt gebracht.
Laborverfahren Das Parallelstellen von Ziel- und Libellenachse kann im La-bor mit einem horizontierten Kollimator erfolgen.
Richtungs- und Winkelmessung mit einem TheodolitenZ=Zielachse, K=Kippachse, L=Libellenachse, V =Vertikal-(Steh-)achse
Achsbedingungen Zielachse ⊥ Kippachse, sonst c=Zielachsabweichung;Kippachse ⊥ Stehachse, sonst i=Kippachsabweichung;
Zielachsabweichungen (Kollimationsfehler): variiert mit Temperatur undDistanz. sin(fc) = sin c
sin z, fc = c
sin(z)ist proportional zu c und nimmt mit an-
steigendem Zenitwinkel ab, fur z = 100gon (Zielung im Horizont) wird fc = c
Bestimmung der Abweichung Punkt im Horizont in beiden Lagen Anzie-len und Richtung A1 und A2 ablesen. c = A2−A1−200gon
2wird durch Messung
in 2 Lagen eliminiert.
Kippachsenabweichung Einfluss von i ist tan(fi) = tan i cos zsin z
, fi =
i 1tan(z)
. Einfluss fi ist proportional zu i und nimmt mit dem Zenitwinkel ab, furz = 100gon ist fi = 0. Kippachsabweichung hat auf horizontale Zielung keinenEinfluss.
Bestimmung der Kippachsabweichung Theodolit wird horizontiert, da-nach hochgelegener Punkt in 1. und 2. Lage anvisieren.
A1 = A0−c
sin z− i
1
tan(z)
A2 = A0 + 200gon +c
sin z+ i
1
tan(z)
i = 1/2
(A2−A1−
2c
sin z± 200gon
)tan z
durch Messung in 2 Lagen eliminiert.
Stehachsschiefe keine instrumentenbedingte Abweichung sondern Folgeschlechter Horizontierung. Einfluss: fv = v sin ucot(z). u = 100gon, v =WinkelKippachseben - Horizontalen. Einfluss wird durch Messung in zwei Lagen nichteliminiert.
Exzentrizitat der Zielachse Steh- und Zielachse schneiden sich nicht.Einfluss: A = A′ϕ, sin ϕ = e
d, Ablesung in Lage 1. A: Ablesung am Hori-
zontalkreis mit Exzentrizitat, A′: Soll-Ablesung ohne Exz., e: Exzentrizitat; d:Abstand zw. Stationspunkt P und Kreismittelpunkt.Lage 2: B = A′ + 200gon + ϕ. B: Ablesung ohne Exz. ϕ = B−A
2− 100gon,
A′ = 12(A + (B − 200gon)) durch Messung in 2 Lagen eliminiert.
Indexabweichung Nullstelle des Vertikalteilkreises ist nicht im Zenit
Arten der Ablesung Diametrale Ablesung bei optischen Theodoliten ho-here Genauigkeit, gegenuberliegende Teilkreisstellen werden aufeinander ab-gebildet und mit einem Koinzidenzmikrometer abgelesen. → Elimination derExzentrizitat des Teilkreises. Elektronische Theodoliten Inkrementaler Win-kelabgriff: auf Teilkreis ist Gitter mit Codemuster aufgebracht. An Lichtschrankeentsteht Ausgangssignal wenn Teilkreis bewegt wird, Signal wird in Impuls um-geformt. Dynamischer Abgriff: Teilkreis rotiert mit konstanter Drehzahl, Licht-schranke misst wie viele Striche durchgehen → proportional zum Winkel, sehrgenau (Auflosung = 0.01mgon) Codierte Verfahren Teilkreis mit Code verse-hen, einzelne Stellen des Codes werden positionsmassig bestimmt, zuerst Gro-bablesung, dann Feinablesung.
Kompensatoren und elektrische Neigungsmesser in TheodolitenInstrumentenneigung wird mit Neigungssensor gemessen und die am Verti-kalkreis abgegriffene Richtung rechnerisch kompensiert. Elektronische Nei-gungssensoren Prazisionsinstrumente besitzen einen Zwei- Achsenkompen-sator um Einfluss der Querneigung zu eliminieren. Analog zu Libellen habenKompensatoren einen Nulllagefehler (analog zum Hohenindexfehler), er lasstsich durch 2 Lagen Messung eliminieren.
Mechanische Distanzmessung Strichmassstabe alle Massstabstrager,die durchgehende Strichteilung aufweisen. Endmassstabe keine durchgehen-de Strichteilung, sondern nur End- und Anfangsstrich. Messbander aus Fe-derstahl; Lange max. 30m; zulassige Abweichung: ∆I = 0.2 + I0.0001[mm]I:Teilstrichabstand in mm, erzielte Genauigkeit liegt im cm Bereich, kann aberdurch exakte Kalibrierung, einer konstanten Zugspannung (50N), rechnerischerBerucksichtigung des Durchhangs, Temperaturkorrektion kT = αT (T − T0)einfolge Materialausdehnung und einer mm-Teilung an der Ablesestelle um eineZehnerpotenz gesteigert werden. αT =Ausdehnungskoeff., T=Mess-, T0 =Be-zugstemp., e =Strecke. Schieblehre zur Messung von Aussendurchmessernvon Korpern. Distometer zur Messung relativer Abstandsanderungen zweierPunkte.
13
Optische Distanzmessung mit parallaktischen Winkeln Entfernungzw. zwei Punkten wird aus einem parallaktischen Dreieck abgeleitet. Messungmit Distanzstrichen Feldverfahren, geringere Genauigkeit, auf Strichkreuzplattehat es in der Vertikalen zwei Distanzstriche, diese begrenzen einen parallakti-schen Winkel, so dass der von ihnen begrenzte Lattenabschnitt mit k = 100multipliziert wird → Distanz; bei schrager Visur: e = (kl sin z) sin z e: Horizon-taldistanz, I: Lattenabschnitt Distanzmessung mit horizontalem parallaktischemWinkel (Basislatte) im Nahbereich (<10m) Genauigkeiten unter 0.5mm, Basis-latten haben konst. Lange von 2m od. 1m und werden horizontal und normalzur Beobachtungsrichtung aufgestellt, parallaktischer Winkel wird mittels Prazi-sionstheodolit gemessen d = b
2cot( γ
2
)Elektronische Distanzmessung (elektrooptische) Signal wird von einemSender ausgesendet und uber die Distanz geschickt. Signal wird von einemEmpfanger aufgenommen. Signallaufzeit multipliziert mit c0 ergibt die Distanz.
Modulation Veranderung der Signalparameter; als Trager fungieren Mikro-wellen oder Lichtwellen.
Modulationsformen Amplitudenmodulation Anderung der Amplitude derTragerschwingungen mit dem Signal.Phasenmodulation Anderung der Phasenlage der Tragerschwingungen in Ab-hangigkeit vom Modulationssignal.Polarisationsmodulation wird bei Mekometer eingesetzt, Polarisationseigen-schaften wird in funktionaler Abhangigkeit zur Modulationsfrequenz geandert.Wellenbereiche extrem kurzwellige kosmische Strahlung bis zu Radiowellenvon einigen km Lange Wellenbereiche der el. Entfernungsmessung: sichtba-res Licht und angrenzender Bereich der Infrarotstrahlung mit 0.4 − 1.3µm furelektrooptische Distanzmesser. Ausschnitt aus dem Bereich der Radiowellenλ1 = 0.195m und λ2 = 0.2445m fur Mikrowellen des NAVSTAR-GPS.Extinktion Zusammenwirken von Streuung und Absorption, fur elektrooptischeMessungen weist im Hinblick auf Extinktion die IR-Strahlung hohere Reichweiteauf als die mit sichtbarer Strahlung.
Entfernungsmessung durch Lichtinterferenzen Interferenz Uberla-gerung zweier Lichtwellen; ein mit einem Laser erzeugter Strahl wird mittelseinem Strahlteiler (Interferometer) in zwei koharante Teilstrahlen gleicher In-tensitat aufgespalten und nach durchlaufen unterschiedlicher Wegstrecken zurUberlagerung gebracht; ein Photodetektor zahlt Hell-Dunkel-Wechsel die durchVerschieben des Reflektors hervorgerufen werden; Mass fur Wegunterschied:d = N λ
2.
Ein-Moden-Verfahren bei Benutzung einer Frequenz; Mangel: hoher Justier-aufwand, keine Information uber Bewegungsrichtung;Zwei-Moden-Verfahren(zwei Frequenzen) interferometrischen Verfahrens: Vor-teile: hochste Auflosung, grosste Genauigkeit. Nachteile: hoher Messaufwand,auf Strecke von ca. 50m beschrankt.Impulsmessverfahren Sender sendet nur wahrend kurzer Zeit, das gesam-te Wellenpaket dient als Messsignal (Puls), Messung der Laufzeit eines Im-pulses ergibt Distanz zum Reflektor d = 1
2c0n
t n: Brechungsindex des Me-diums. Vorteil: grossere Reichweite, wegen energiereicher Impulse, Verfahrenuber grossere Distanzen reflektorlos. Nachteile: hoher technischer Aufwand,u.a. durch atmospharische Einflusse hervorgerufene Impulsdeformationen.Phasenvergleichsverfahren 90% aller EDM arbeiten damit; Das Messergeb-nis wird von einer Massstabswellenlange λ abgeleitet; Frequenz f erzeugt λ:λ = c0
n∗feiner kontinuierlich ausgestrahlten Tragerwellenlange wird ein si-
nusformiges Signal aufmoduliert (Amplitudenmodulation), Licht wird dabei inseiner Intensitat mit einer Modulationsfrequenz verandert, die Messwelle wirdausgestrahlt zu einem Reflektor und trifft im Empfanger phasenverschoben ein:d = 1
2(Nλ + ∆λ), ∆λ = ∆ ϕ
2πλ ∆ϕ: Phasenverschiebung, wird digital gemes-
sen. Vorteile: ausgereiftes Verfahren, kompakte Gerate. Nachteile: eindeutigeStreckenmessung ist fur Strecken langer als die Massstabswellenlange mit ei-ner einzigen Massstabswellenlange nicht moglich.Kalibrierung Instrumente sind auf Sollwerte abzugleichen und die Korrekturensind rechnerisch anzubringen, Bestimmung der Abweichung nennt man Kali-brierung.Additionskorrektion Unterschied zwischen innerem und ausserem Lichtwegeiner Instrument-Reflektor-Kombination ist eine Additionskorrektion anzubrin-gen, zur Bestimmung werden auf Vergleichsstrecken Soll und Ist Werte gemes-sen: a = AC − (AB + BC) a =Additionskonstante (Messwerte werden zuerstmeteorologisch, geometrisch und instrumentell (Frequenz) korrigiert).Frequenzkorrektion beim Phasenvergleichsverfahren soll durch die Modulati-on der Tragerwelle mit der Modulationsfrequenz f eine bestimmte Wellenlangeerzeugt werden; weicht diese Frequenz von ihrer Sollfrequenz fM ab so ist zukorrigieren kFrequenz = fM−f
f[ppm=pars per million]. Die frequenz- (oder
massstabs-) korrigierte Distanz df = dRoh + kFrequenzdRoh
Die Meteorologische Korrektion beruht auf der Abweichung des tatsachli-chen Brechungsindexes n von der Normatmosphare, Messwellenlange λ unddie Laufzeit des Pulses t andert sich: λ = c0
nf, t = 2nd
c0. Das heisst, dass man
instrumentenbautechnisch eine bestimmte Modulationswellenlange λ durch dieAuswahl der Modulationsfrequenz fM festlegen kann. Phasengeschwindig-keit Ausbreitungsgeschwindigkeit einer monochromatischen Welle. Da bei EDM
Geraten das Licht moduliert ist, verhalt es sich wie ein schmales Frequenzbandvon Wellen unterschiedlicher Wellenlange, d.h. wie eine Wellengruppe. Grup-pengeschwindigkeit ist immer kleiner als Phasengeschw. der einzelnen Wel-lenlangen. Man unterscheidet deshalb:Phasen- und Gruppenbrechungsindex.
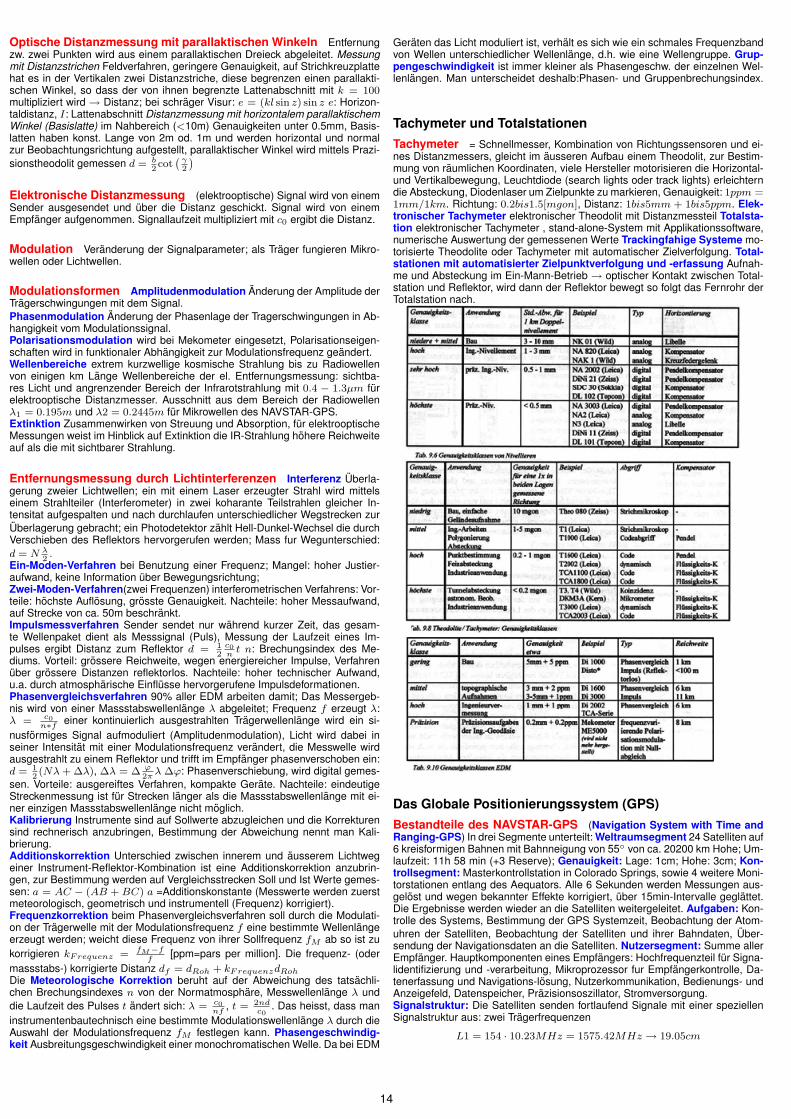
Tachymeter und TotalstationenTachymeter = Schnellmesser, Kombination von Richtungssensoren und ei-nes Distanzmessers, gleicht im ausseren Aufbau einem Theodolit, zur Bestim-mung von raumlichen Koordinaten, viele Hersteller motorisieren die Horizontal-und Vertikalbewegung, Leuchtdiode (search lights oder track lights) erleichterndie Absteckung, Diodenlaser um Zielpunkte zu markieren, Genauigkeit: 1ppm =1mm/1km. Richtung: 0.2bis1.5[mgon], Distanz: 1bis5mm + 1bis5ppm. Elek-tronischer Tachymeter elektronischer Theodolit mit Distanzmessteil Totalsta-tion elektronischer Tachymeter , stand-alone-System mit Applikationssoftware,numerische Auswertung der gemessenen Werte Trackingfahige Systeme mo-torisierte Theodolite oder Tachymeter mit automatischer Zielverfolgung. Total-stationen mit automatisierter Zielpunktverfolgung und -erfassung Aufnah-me und Absteckung im Ein-Mann-Betrieb → optischer Kontakt zwischen Total-station und Reflektor, wird dann der Reflektor bewegt so folgt das Fernrohr derTotalstation nach.
Das Globale Positionierungssystem (GPS)Bestandteile des NAVSTAR-GPS (Navigation System with Time andRanging-GPS) In drei Segmente unterteilt: Weltraumsegment 24 Satelliten auf6 kreisformigen Bahnen mit Bahnneigung von 55◦ von ca. 20200 km Hohe; Um-laufzeit: 11h 58 min (+3 Reserve); Genauigkeit: Lage: 1cm; Hohe: 3cm; Kon-trollsegment: Masterkontrollstation in Colorado Springs, sowie 4 weitere Moni-torstationen entlang des Aequators. Alle 6 Sekunden werden Messungen aus-gelost und wegen bekannter Effekte korrigiert, uber 15min-Intervalle geglattet.Die Ergebnisse werden wieder an die Satelliten weitergeleitet. Aufgaben: Kon-trolle des Systems, Bestimmung der GPS Systemzeit, Beobachtung der Atom-uhren der Satelliten, Beobachtung der Satelliten und ihrer Bahndaten, Uber-sendung der Navigationsdaten an die Satelliten. Nutzersegment: Summe allerEmpfanger. Hauptkomponenten eines Empfangers: Hochfrequenzteil fur Signa-lidentifizierung und -verarbeitung, Mikroprozessor fur Empfangerkontrolle, Da-tenerfassung und Navigations-losung, Nutzerkommunikation, Bedienungs- undAnzeigefeld, Datenspeicher, Prazisionsoszillator, Stromversorgung.Signalstruktur: Die Satelliten senden fortlaufend Signale mit einer speziellenSignalstruktur aus: zwei Tragerfrequenzen
L1 = 154 · 10.23MHz = 1575.42MHz → 19.05cm
14

L2 = 120 · 10.23MHz = 1227.60MHz → 24.45cm
Verwendung einer zweiten Frequenz ermoglicht es die Einflusse der Ionosphareauf die Ausbreitungsgeschwindigkeit der Signale zu erfassen. Jeder Satellit sen-det beide Tragerwellen aus, deren Navigationssignale (Codes) und Navigations-und Systemdaten (Messages) uberlagert sind.L1 mit Prazisions P-Code (Precise) und dem weniger genauen C/A Code inForm eines PRN-Codes (Pseudo Random Noise) moduliert.L2 nur mit P-Code moduliert.P-Code fur genauere Positionsbestimmung, Wiederholungsrate von 267 Tagen,Frequenz: 10.23MHz, Wellenlange: 29.31cm, jeder Satellit sendet nur speziel-les 7 Tage dauerndes Segment des Codes. λ = c
f.
C/A Code Frequenz: 1.023MHz, Wellenlange: 293.1m, jeder Satellit hat eige-nes Muster, Zykluslange: 1ms → Identifizierung einfacher.Datensignal (Navigation Message): beiden Tragerwellen aufgepragt, binarerDatenstrom, Zusatzdaten fur Ortung und Navigation, gesamter Infogehalt isterst nach 12.5 Min. ubermittelt.
Selective Availability and Anti Spoofing vom Militar zur kunstlichenVerschlechterung der Signale; stellen dem zivilen Benutzer nicht die volle Ge-nauigkeit zur Verfugung; wurde 1. 5. 2000 entfernt. Selective Availability Ver-falschung von Bahn und Uhrkorrekturdaten, in geodatischen Anwendungen auf-grund der Differenzbildung weitgehend eliminiert, bei nur einem Empfanger →Verschlechterung der Lagegenauigkeit von 15m auf 100m. Anti Spoofing Ver-schlusselung des P-Codes in den unbekannten Y-Code, hauptsachlich kurzzei-tige Anwendungen betroffen.
Messprinzipien Pseudodistanzmessung: Distanz zwischen Empfanger undSatellit wird gemessen, fur die geometrische Losung werden min. 3 Distanzenbenotigt (Schnittpunkt dreier Kugeln), Laufzeitmessung, Ausbreitungsgeschwin-digkeit ergibt Pseudodistanz, da Uhren nicht synchronisiert sind. Korrekturensiehe Auswertverfahren (unten). Phasenmessung gemessen wird die Phasen-verschiebung der Tragerwelle, die ankommende Phase wird mit der Phase einesim Empfanger modulierten Referenzsignals verglichen, Anzahl Wellenlangenbleibt zunachst unbekannt.Messung der Doppelfrequenzverschiebung Doppler Effekt, durch die Be-wegung des Satelliten gegenuber dem Empfa-nger andert sich die Frequenzdes Satellitensignals. Prinzip der relativen Punktbestimmung Satellitensigna-le werden gleichzeitig von mindestens zwei Empfa-ngern erfasst, Fehlerquellenheben sich fast auf → erhohte Genauigkeit, Phasenmessung wird angewandt,Messung muss anschliessend ausgewertet werden (post processing).
Fehlereinflusse bei GPS Fehlerquellen: Satelliten, Empfangern, Signal-ausbreitung, Auswertung der Basislinien, Transformation in lokale Koordinaten-systeme.
Moglichkeiten der Positionsbestimmung static lange Beobachtungs-dauer (30min- 3h) auf Neupunkten, da fur die Losung der Mehrdeutigkeiten diezeitabhangige Veranderung der geometrischen Beziehung zwischen Empfangerund Satellit ausgenutzt wird, genaustes Verfahren. rapid static Reduktion derBeobachtungsdauer auf 5- 20min fur Basislinien bis zu 10km um einen bekann-ten Referenzpunkt als Zentrum. reoccupation falls Satellitenkonstellation zuschlecht fur rapid static, Neupunkt wird fur 3- 5min besetzt, nach einer Stundewird dies wiederholt. stop and go min. eine Referenzstation auf einem bekann-ten Punkt, auf dem ersten Neupunkt wird mit dem Rover die Initialisierung vor-genommen, danach wird bei den nachsten Punkten die Beobachtungsdauer vielkurzer, der Kontakt zwischen Rover und Satellit darf nicht abreissen. kinema-tic setzt den kontinuierlichen Empfang von vier Satelliten voraus, Mehrdeutig-keitslosung geschieht bereits wahrend der Bewegung. real time GPS von derReferenzstation werden via Funk Korrekturdaten an einen od mehrere Roverausgesendet, die eine Koordinatenbestimmung unmittelbar im Feld erlauben→ermoglicht Absteckung mit GPS. Bedingung ist Kenntnis des Bezugs zwischendem WGS 84-Koordinatensystem und dem lokalen System (WGS 84: WorldGeodetic System, Weltellipsoid).
Transformation der GPS-Koordinaten Resultate von GPS Messung:dreidimensionale kartesische Koordinaten im geozentrischen Koordinatensys-tem WGS84 (ellipsoidische Hohen). Transformation ins Landessystem Satel-litendatum → Referenzellipsoid des Landes, Referenzellipsoid → ebenes Lan-deskoord.system (Projektion). Sind die 7 Transformationsparameter unbekannt,mussen sie bestimmt werden, indem im Landessystem schon bekannte Punk-te mit GPS vermessen werden. Als Resultat des ersten Schrittes erhalt manLange, Breite und ellipsoidische Hohe des Punktes bezogen auf das Referen-zellipsoid.
DGPS-Dienste Kommerzielle DGPS-Dienste ersparen dem GPS-Nutzer dieAufstellung eigener Referenzstationen. Messungen mit nur einem GPS-Gerat,das mit einem Funk- oder GSM-Empfanger fur den Empfang von Korrektursi-gnalen ausgerustet ist, sind moglich.
DGPS fur Navigationszwecke Korrektursignale im RTCM-Format wer-den uber Langwellen und UKW von vielen Station ausgesandt. Eine Genauigkeitvon 1- 3m kann mit Swisspos-nav erreicht werden.
DGPS fur geodatische Zwecke Es sind weitere RTCM-Datentypen not-wendig. Diese benotigen eine Bandbreite, fur die RDS nicht genugt und diedamit eigene Frequenzen bzw. eine Ubertragung via GSM erfordert. Das auto-matische GPS-Netz Schweiz AGNES ist im Aufbau und soll bis Ende 2001 ca.25 Permanentstationen in der ganzen Schweiz Echtzeit-GPS mit Zentimeterge-nauigkeit ermoglichen.
GLONASS GLONASS ist das russische Pendant zu GPS und funktioniertnach den gleichen Prinzipien. Unterschied: jeder Satellit sendet auf eigener Fre-quenz; Signale werden nicht kunstlich verfalscht.———————————————————————————————–
Inhaltsverzeichnis
1 Grundlagen 1Geodatische Bezugsflachen . . . . . . . . . . . . . . . . . . . . . . . 1Geodatische Koordinatensysteme . . . . . . . . . . . . . . . . . . . . 1Ebene, kartesische Koordinatensysteme . . . . . . . . . . . . . . . . . 1Reduktion infolge der Projektion . . . . . . . . . . . . . . . . . . . . . 1Reduktion auf Projektionsflache . . . . . . . . . . . . . . . . . . . . . 1Korrektur wegen Projektionsverzerrung . . . . . . . . . . . . . . . . . 1Geodatische Bezugsrichtungen . . . . . . . . . . . . . . . . . . . . . 1Masseinheiten und Massverhaltnisse . . . . . . . . . . . . . . . . . . 1Umrechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11. Geodatische Fundamentalformel . . . . . . . . . . . . . . . . . . . 1Kathetenzuschlagsformel . . . . . . . . . . . . . . . . . . . . . . . . . 1Massstab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Neigungsverhaltnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Basismesstechnik und einfache Hilfsmittel 2Jalon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Senkel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Doppelpentaprisma . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Messband . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Lageaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Zentrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Horizontierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Sensoraufstellung mit optischem Lot/ Laserlot . . . . . . . . . . . . . . 2Zwangszentrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Geodatisches Koordinatensystem . . . . . . . . . . . . . . . . . . . . 2
3 Ebenes Koordinatenrechnen 2Erste Geodatische Hauptaufgabe, Polares Anhangen . . . . . . . . . . 2Zweite Geodatische Hauptaufgabe . . . . . . . . . . . . . . . . . . . . 2Koordinatentransformation . . . . . . . . . . . . . . . . . . . . . . . . 2Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Massstabsfaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Ahnlichkeitstransformation . . . . . . . . . . . . . . . . . . . . . . . . 3Affine Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4 Terrestrische Koordinatenbestimmung 3Fixpunktfeld der Landes- und Amtlichen Vermessung . . . . . . . . . . 3Terristrische Methoden der Netzverdichtung . . . . . . . . . . . . . . . 3Polygonometrische Bestimmungsarten . . . . . . . . . . . . . . . . . . 3Einzelpunkteinschaltung . . . . . . . . . . . . . . . . . . . . . . . . . 3Richtungs- und Winkelmessung . . . . . . . . . . . . . . . . . . . . . 3Abriss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Berechnung der Orientierung . . . . . . . . . . . . . . . . . . . . . . . 4Distanzreduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Distanzreduktion aus Punkthohen . . . . . . . . . . . . . . . . . . . . 4Distanzreduktion mit Zenitwinkeln . . . . . . . . . . . . . . . . . . . . 4Reduktion Kugeldistanz → Projektionssystem . . . . . . . . . . . . . . 4Tabelle Distanzreduktion . . . . . . . . . . . . . . . . . . . . . . . . . 4Refraktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Distanzen kleiner 150m . . . . . . . . . . . . . . . . . . . . . . . . . . 4Distanzen grosser 150m, Einfluss der Erdkrummung . . . . . . . . . . 4
15
5 Trigonometrische Hohenbestimmung 5Methoden der Hohenbestimmung . . . . . . . . . . . . . . . . . . . . 5Hohensysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Hohennetze der Schweiz . . . . . . . . . . . . . . . . . . . . . . . . . 5Geometrisches Nivellement . . . . . . . . . . . . . . . . . . . . . . . . 5Vorgehen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Flachennivellement . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Trigonometrische Hohenbestimmung . . . . . . . . . . . . . . . . . . . 6Trigonometrisches Nivellement . . . . . . . . . . . . . . . . . . . . . . 6Barometrische Hohenmessung . . . . . . . . . . . . . . . . . . . . . . 6Hydrostatisches Nivellement . . . . . . . . . . . . . . . . . . . . . . . 6Hohenbestimmung mit GPS . . . . . . . . . . . . . . . . . . . . . . . 6Weitere Bestimmungsmethoden . . . . . . . . . . . . . . . . . . . . . 6Genauigkeitsrangliste der Messmethoden . . . . . . . . . . . . . . . . 6
6 Geodatische Statistik 6Fehlerarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Verteilungsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Genauigkeitsmasse . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Gewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Schutz vor groben Fehlern . . . . . . . . . . . . . . . . . . . . . . . . 7Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Wichtige Formeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Toleranzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
7 Aufnahme 8Diskrete Punkte, Vektorpunkte . . . . . . . . . . . . . . . . . . . . . . 9Alle Punkte, Rasterdaten . . . . . . . . . . . . . . . . . . . . . . . . . 9Polare Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Photogrammetrische Verfahren . . . . . . . . . . . . . . . . . . . . . . 9GPS-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Einbinde- und Orthogonal-Verfahren . . . . . . . . . . . . . . . . . . . 9Laser Profiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Laser Scanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Nivellier-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Staffelmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Distanzmessverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . 9Messverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Raster, Langen-, Querprofile . . . . . . . . . . . . . . . . . . . . . . . 9Ubersicht Messverfahren . . . . . . . . . . . . . . . . . . . . . . . . . 9Rasteraufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Langenprofilaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . 10Querprofil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Amtliche Vermessung . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Leitungsaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Genauigkeitsanforderungen . . . . . . . . . . . . . . . . . . . . . . . 10Auswertung der Aufnahmedaten . . . . . . . . . . . . . . . . . . . . . 10Darstellungsformen von Informationen in Karten und Planen . . . . . . 11
8 Absteckung 11Absteckverfahren (Messverfahren) . . . . . . . . . . . . . . . . . . . . 11
9 Geodatische Instrumente 12Instrumente zur Neigungsmessung . . . . . . . . . . . . . . . . . . . 12Nivellierinstrumente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Nivellierverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Richtungs- und Winkelmessung mit einem Theodoliten . . . . . . . . . 13Tachymeter und Totalstationen . . . . . . . . . . . . . . . . . . . . . . 14Das Globale Positionierungssystem (GPS) . . . . . . . . . . . . . . . 14
16
Index
(VLBI) Very Long Baseline Interferometry, 6Abbildungen optische Linsen und Spiegel, 12Abbildungsfehler von Linsen und Beseitigung, 12Absorbtion, 12Abstecken mit freier Stationierung:, 11Abstecken mit polaren Verfahren:, 11Abstecken von 1D-, 2D- und 3D-Koordinaten im Hochbau, 11Abstecken von Ebenen mit Rotationslasern, 11Abstecken von Ebenen, 11Abstecken von Richtungen, 11Absteckung im allg. Hochbau, 2D Koordinaten, 12Absteckung mit real time GPS:, 11Absteckung von 1D, 2D und 3D Koordinaten, 11Achsbedingungen, 13Additionskorrektion, 14Amplitudenmodulation, 14Anforderungen an die Definition von Hohen, 5Anforderungen in der AV, 10Anforderungen:, 12Anti Spoofing, 15Arbeitsprinzipien, 1Arten der Ablesung, 13Aufgaben:, 14Aufgabenbereiche, 9Aufgabengebiete, 1Aufgabe, 6Auflosung, 7Aufnahme diskreter Punkte, 6Aufnahme f. Projektierung:, 10Aufnahme verdeckter Punkte, 9Aufnahmen von fertig erstellten Anlagen, 10Aufnahmen/ Abnahmen von Bauteilen, Endabnahmen, 10Aufnahme, 9Ausschlag:, 12Auswertung und Abschluss, 9Azimut Az(A, B), 1Boschungsverhaltnis (h : e), 2Basisinformation, 8Basispunkte (LFP3), 3Bedeutung und Anwendung, 4Begriffe, 11Beidseitig (Koordinaten) angeschlossener Polygonzug, 3Beidseitig (Koordinaten, Richtung) angeschlossener Polygonzug, 3Beispiele zu den Absteckverfahren, 11Beschriftung, 11Bestandesaufnahmen, Ausfuhrungswerke, Werkdokumentation, 10Bestandteile des NAVSTAR-GPS, 14Bestimmung der Abweichung, 13Bestimmung der Kippachsabweichung, 13Bezugssystem, 10Bias δ, 7Bogenschnitt, 3Brechungsindex, 12Bruchkanten, 11C/A Code, 15CH Koordinatensystem, 1Codierte Verfahren, 13Computergestutze Auswertung im Gelande, 10Computergestutzte Auswertung, 10DGPS fur geodatische Zwecke, 15DGPS fur Navigationszwecke, 15DGPS-Dienste, 15DHM 25, 11Darstellung, 10Das digitale Gelandemodell, 11Datensignal (Navigation Message), 15Definitionen, 12Diametrale Ablesung, 13Digitalnivelliere, 13Direkt im Raum realisierte Fluchtgerade (Richtlaser):, 11Direktes Einfluchten von Punkten in eine Gerade, 2Distanzen < 10km, 4Distanzmesserkalibrierung, 8Distanzmessung: empirische Varianz und Standardabweichung, 8Distanzmessung:, 12Distometer, 13Dokumentation, 11Doppelbeobachtung, 7Doppelnivellement, 5Dosenlibellen, 12Dreiecksvermaschung, 11Durchhang, 2Ebenes Gelande:, 9Ebene, 1Ein-Moden-Verfahren, 14Einbindeverfahren, 2, 9Einfaches hydrostatisches Nivellement, 6Einfaches und erweitertes Sprungstandverfahren, 6Einfluchten von Punkten in einer Vetikalebene:, 11Einfluss der Erdkrummung, 6Einfluss der Refraktion, 6Eingehanger Nivellementszug, 5
Einsatz Nivellier:, 12Einsatz elektronischer Tachymeter:, 12Einseitig (=Koordinaten, Richtung) angeschlossener Polygonzug, 3Einzelpunkte, 9Elektronische Distanzmessung, 14Elektronische Neigungsmesser, 12Elektronische Neigungssensoren, 13Elektronische Theodoliten, 13Elektronischer Tachymeter, 14Elliposidissche Hohen, 5Empirische Standardabweichung, 7Empirische Varianz, 7Endmassstabe, 13Entfernungsmessung durch Lichtinterferenzen, 14Erwartungwert µ, 7Extinktion, 14Exzentrizitat der Zielachse, 13Fur Distanzen > 150m:, 6Falllinie, 11Fehlereinflusse bei GPS, 15Fehlerquellen:, 15Flachennivellement, 5Flussigkeitssensor mit elektrischem Abgrill, 12Flussigkeitssensoren, 12Fluchten von Geraden, 2Fluchten:, 11Freie Stationierung, 3Freier Nivellementszug, 5Freier Polygonzug, 3Frequenzkorrektion, 14GLONASS, 15Gegenseitig-gleichzeitige Zenitwinkelmessung, 6Gegenseitige, gleichzeitige Zenitwinkelbeobachtung, 4Gelandelinie, 11Genauigkeit:, 14Genauigkeitsanforderung im Bauwesen, 10Genauigkeitsangaben beim Abriss, 8Geodasie, 1Geographisch Nord, 1Geographische Koordinaten, 1Geoid, 1Geozentisches, erdfestes, kartesisches Koordinatensystem, 1Geradenschnitt, 3Geschlossener Polygonzug, Ringpolygon, 3Gewichtetes Mittel bei Nivellementsknoten, 8Grosstmass, 8Grat- und Tallinien, 11Grenzabmass, 8Grobe Fehler, 7Grundbuch:, 10Gruppengeschwindigkeit, 14Hohen-ubertragung im Hochbau:, 12Hohenangaben, 11Hohendatum, 5Hohenlinien, 11Hohenwinkel, 3Handgefallemesser, 2Horizontale Ebenen:, 11Horizontale Ebenen, 11Horizontale Richtungsmessung, 3Hydrodynamisches Nivellement, 6Impulsmessverfahren, 14Indexabweichung, 13Indirekte polare Verfahren:, 11Indirektes Einfluchten, 2Innere Genaugkeit, 7Instrumente und Genauigkeiten, 6Interferenz, 14Istabmass, 8Istmass, 8Justierung eines Rotationsnivelliers, 13Kalibrierung, 14Kantonale (HFP2) und kommunale (HFP3) Nivellemente, 5Kartennord, 1Karte, 11Kippachsenabweichung, 13Kleinstmass, 8Koinzidenzlibelle, 12Komensatornivelliere, 13Kompensatoren und elektrische Neigungsmesser in Theodoliten, 13Konkave Linsen, 12Konstruktion der Gelandeform, 11Kontrolle der Aufnahme und Auswertung:, 9Kontrollen der Aufnahmen, 10Kontrolle, 10, 11Kontrollsegment:, 14Konvexe Linsen, 12Korrekturen, 15Korrekturwert, 11L1, 15L2, 15Laborverfahren, 13
17
Lagefixpunkte 1 (LFP1), 3Lagefixpunkte 2 (LFP2), 3Landesnivellement, 5Laserlot, 2Layer, 10Libellenachse:, 12Libellen, 12Liniennivellement, 5Lokales Tangential- & lokales topozentisches System, 1Lotung von Punkten, 11Lotungen, 11Massig geneigt:, 9Moglichkeiten der Positionsbestimmung, 15Moglichkeiten neuer Tachymeter, 11Magnetisch Nord, 1Manuelle Auswertung im Feld, 10Markante Punkte, 11Mechanische Distanzmessung, 13Mechanische Lotung:, 11Meridiankonvergenz γ, 1Messbander, 13Messprinzip:, 9Messprinzipien, 15Messung der Doppelfrequenzverschiebung, 15Messung und Ausrustung:, 9Messverfahren:, 12Messverfahren, 10Meteorologische Korrektion, 4, 14Mittleres Erdellipsoid, 1Modulationsformen, 14Modulation, 14Nachbarschaftsprinzip, 1Nachteile, 9Navigation System with Time and Ranging-GPS, 14Nennmass, 8Nivelierverfahren, 5Nivellementsknoten, 5Nivellementsschleife, 5Nivelliere mit Rohrenlibelle, 13Nivellierprobe aus der Mitte und Exzentrisch, 13Nivellierprobe nach Nabauer, 13Nivellierverfahren, 9, 10Normalhohen, 5Nutzersegment:, 14Optische Distanzmessung mit parallaktischen Winkeln, 13Optische Linsen, 12Optische Lotung:, 11Ordnungsprinzip, 1Ordnung, 3Orthogonalverfahren, 2Orthometrische Hohen, 5Othogonalverfahren, 9P-Code, 15Pendelsysteme, 12Pentaprisma, 12Phasengeschwindigkeit, 14Phasenmessung, 15Phasenmodulation, 14Phasenvergleichsverfahren, 14Photogrammetrie/ Luftbild, 9Planparallele Platte, 12Plan, 11Polare Aufnahme, 10Polares Verfahren, Vorgehen, 10Polares Verfahren/ GPS, 10Polarisationsmodulation, 14Polarverfahren / GPS, 9Prazisionsschlauchwaage, 6Primare Scannverfahren, 9Prinzip der relativen Punktbestimmung, 15Prinzip, 5, 6Profil- und Rasteraufnahme, 9Prozent- oder Promilleangaben, 2Punktarten, 11Punktsignalisation, 2Punktversicherung, 11Quasi-simultane Methode, 6Rohrenlibellen, 12Ruckwartseinschneiden, 3Referenzellipsoid, 1Reflektor, Prismenreflektor, 12Reflexionsgesetz, 12Reflexionsprismen, 12Refraktionseinfluss, 4Rekognoszieren, 9Richtungsmessung:, 12Rotationsellipsoid, 1Rotationslasernivellier, 13SLR/LLR, 6Satellitenaltimetrie, 6Schieblehre, 13Schiefe Verteilung, 7Schmiegungskugel, 1Schnurgerust:, 12Schnurlot, 2
Schraffen, 11Seitwartschneiden, 3Sekundare Scanverfahren, 9Selective Availability and Anti Spoofing, 15Selective Availability, 15Signalstruktur:, 14Situation und Topographie, 11Situation:, 11Spharische Aberration:, 12Spielpunkt:, 12Staffelmessung in geneigtem Gelande, 2Staffelmethode, 9, 10Standardabweichung bei Doppelmessung, 8Stark geneigt:, 9Stehachsschiefe, 13Strichmassstabe, 13Strukturlinie, 11Systematische Abweichung, 7Tachymeter, reflektorlos, 9Tachymeter, 14Tachymetrie mit Reflektor, 9Theodolit-Messverfahren, 9Theorie der Gelandemodelle, 11Toleranz, 8Topographie:, 11Totalreflexion:, 12Totalstationen mit automatisierter Zielpunktverfolgung und -erfassung, 14Totalstation, 14Trackingfahige Systeme, 14Tracklight, 11Transformation der GPS-Koordinaten, 15Transformation ins Landessystem, 15Varianz, 7Verbesserung v, 7Verlangern einer Geraden:, 11Vermaschung, 11Verteilung des Widerspruchs, 5Vertikale Ebenen, 11Vertikalmessung, 3Visieren (Hohenabsteckungen):, 11Visieren mit freiem Auge:, 11Vorarbeiten:, 9, 10Vorbereitung, 9Vorteile, 9Vorwartseinschneiden, 3Wahre Abweichung ε, 7Weiterverarbeitung RIS, CAS, 10Wellenbereiche, 14Weltraumsegment, 14Winkel α, 2Winkelbezeichnungen, 1Wirtschaftlichkeitsprinzip, 1Zenitwinkel, 3Zentrierstab, 2Zielachsabweichungen, 13Zufallige Abweichung, 7Zuverlassigkeit und Kontrolle, 1Zwei-Moden-Verfahren, 14Zwischenlinien, 11Aussere Genauigkeit, 7Ubersicht:, 10arithmetisches Mittel x, 7chromatische Aberration:, 12dynamisch, 5elektromagnetisch, 5kinematic, 15magnetische Deklination δ, 1motorisierte Verfahren, 6nach Forstner, 13optischer Keil, 12optisches Lot, 2optisch, 5rapid static, 15real time GPS, 15reoccupation, 15static, 15stop and go, 15wahrer Wert xw , 7
18