Geometrically nonlinear gravito-elasticity: Hyperelastostatics coupled to Newtonian gravitation
9
Geometrically nonlinear gravito-elasticity: Hyperelastostatics coupled to Newtonian gravitation q Paul Steinmann Applied Mechanics, University of Erlangen-Nuremberg, Germany article info Article history: Available online 27 April 2011 Keywords: Newtonian gravitation Hyperelasticity Coupled gravito-elasticity abstract A theory of nonlinear elasticity is presented that incorporates a spatially non-constant Newtonian gravitational field as is appropriate if deformable heavy masses of finite volume are considered. For Newtonian gravitation the mass density is a sink for the (scaled) grav- itational field. This Gauss-type law for gravitation is incorporated into the mechanical bal- ance equations of linear and angular momentum as well as into the thermomechanical balance equations of energy and entropy. To this end, a total energy density as well as total Piola and Cauchy stresses are introduced that directly capture the contribution of Newtonian gravitation. For the nonlinear elastic case the pertinent relations for the gravi- to-elastically coupled problem are recovered from a variational setting in terms of the non- linear deformation map and a gravitational potential. Ó 2011 Elsevier Ltd. All rights reserved. 1. Introduction Newtonian gravitation (Newton, 1686) is the paradigm for far-field forces (action at a distance). It is an approximative theory for the effects of gravitation that can for example successfully model observations of our planetary system as described by the laws of Kepler. Since the work of Einstein on general relativity it is commonly accepted, however, that New- tonian gravitation has some shortcomings, for example it fails to describe with high accuracy the precession of the perihelion of Mercury’s orbit and that it incorrectly predicts the angular deflection of light rays due to gravitation. Furthermore, New- tonian gravitational interaction occurs instantaneously and thus with infinite velocity (thus ignoring the speed of light as the limiting velocity). Nevertheless, as long as no extremely massive and dense objects are considered, i.e. u/c 2 1 whereby u is the gravitational potential (to be introduced subsequently) and c is the speed of light, and as long the objects under consid- eration move much slower than the speed of light, i.e. v 2 /c 2 1, Newtonian gravitation may be considered the low-gravity limit of general relativity and thus as a good approximation. If we restrict ourselves to those situations where Newtonian gravitation is applicable then its striking similarity to Coulomb’s law of electro-statics motivates our attempt to formulate a theory of nonlinear elasticity that incorporates the effects of gravitation in a similar manner as the recent theory of non- linear electro-elasticity incorporates the effects of electro-statics (see Dorfmann & Ogden, 2005; Eringen & Maugin, 1990; Maugin, 1988; Vu & Steinmann, 2010; Vu, Steinmann, & Possart, 2007). Thus, by analogy we are tempted to baptize this new theory as gravito-elasticity. It shall be noted carefully, however, that historically it was Coulomb and Ampère that fol- lowed Newton by adopting his law of action at a distance to the cases of electro-magnetism. Possible applications of gravito- elasticity are heavy bodies of finite extent that deform elastically (and possibly geometrically nonlinearly) under the action of their own gravitation, whereby the nonlinear deformation and thus spatial redistribution of mass leads to a perturbation of the initial gravitational field that penetrates both the body and the whole of the surrounding free space. This problem has 0020-7225/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.ijengsci.2011.03.017 q Submitted to the Eringen Special Issue of International Journal of Engineering Science. E-mail address: [email protected] International Journal of Engineering Science 49 (2011) 1452–1460 Contents lists available at ScienceDirect International Journal of Engineering Science journal homepage: www.elsevier.com/locate/ijengsci
-
Upload
paul-steinmann -
Category
Documents
-
view
214 -
download
2
Transcript of Geometrically nonlinear gravito-elasticity: Hyperelastostatics coupled to Newtonian gravitation

International Journal of Engineering Science 49 (2011) 1452–1460
Contents lists available at ScienceDirect
International Journal of Engineering Science
journal homepage: www.elsevier .com/locate / i jengsci
Geometrically nonlinear gravito-elasticity: Hyperelastostatics coupledto Newtonian gravitation q
Paul SteinmannApplied Mechanics, University of Erlangen-Nuremberg, Germany
a r t i c l e i n f o
Article history:Available online 27 April 2011
Keywords:Newtonian gravitationHyperelasticityCoupled gravito-elasticity
0020-7225/$ - see front matter � 2011 Elsevier Ltddoi:10.1016/j.ijengsci.2011.03.017
q Submitted to the Eringen Special Issue of InternE-mail address: [email protected]
a b s t r a c t
A theory of nonlinear elasticity is presented that incorporates a spatially non-constantNewtonian gravitational field as is appropriate if deformable heavy masses of finite volumeare considered. For Newtonian gravitation the mass density is a sink for the (scaled) grav-itational field. This Gauss-type law for gravitation is incorporated into the mechanical bal-ance equations of linear and angular momentum as well as into the thermomechanicalbalance equations of energy and entropy. To this end, a total energy density as well as totalPiola and Cauchy stresses are introduced that directly capture the contribution ofNewtonian gravitation. For the nonlinear elastic case the pertinent relations for the gravi-to-elastically coupled problem are recovered from a variational setting in terms of the non-linear deformation map and a gravitational potential.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Newtonian gravitation (Newton, 1686) is the paradigm for far-field forces (action at a distance). It is an approximativetheory for the effects of gravitation that can for example successfully model observations of our planetary system asdescribed by the laws of Kepler. Since the work of Einstein on general relativity it is commonly accepted, however, that New-tonian gravitation has some shortcomings, for example it fails to describe with high accuracy the precession of the perihelionof Mercury’s orbit and that it incorrectly predicts the angular deflection of light rays due to gravitation. Furthermore, New-tonian gravitational interaction occurs instantaneously and thus with infinite velocity (thus ignoring the speed of light as thelimiting velocity). Nevertheless, as long as no extremely massive and dense objects are considered, i.e. u/c2� 1 whereby u isthe gravitational potential (to be introduced subsequently) and c is the speed of light, and as long the objects under consid-eration move much slower than the speed of light, i.e. v2/c2� 1, Newtonian gravitation may be considered the low-gravitylimit of general relativity and thus as a good approximation. If we restrict ourselves to those situations where Newtoniangravitation is applicable then its striking similarity to Coulomb’s law of electro-statics motivates our attempt to formulatea theory of nonlinear elasticity that incorporates the effects of gravitation in a similar manner as the recent theory of non-linear electro-elasticity incorporates the effects of electro-statics (see Dorfmann & Ogden, 2005; Eringen & Maugin, 1990;Maugin, 1988; Vu & Steinmann, 2010; Vu, Steinmann, & Possart, 2007). Thus, by analogy we are tempted to baptize thisnew theory as gravito-elasticity. It shall be noted carefully, however, that historically it was Coulomb and Ampère that fol-lowed Newton by adopting his law of action at a distance to the cases of electro-magnetism. Possible applications of gravito-elasticity are heavy bodies of finite extent that deform elastically (and possibly geometrically nonlinearly) under the actionof their own gravitation, whereby the nonlinear deformation and thus spatial redistribution of mass leads to a perturbationof the initial gravitational field that penetrates both the body and the whole of the surrounding free space. This problem has
. All rights reserved.
ational Journal of Engineering Science.n.de

P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460 1453
long since been treated in the analysis of the mechanical behavior of the earth under the action of gravity (see Hoskins, 1909,1921). Due to the precision of contemporary micro-gravity measurement instrumentation this is still relevant in moderngeophysics, see for instance the discussion in Charo, Fernandez, Luzon, and Rundle (2006, 2007). In these works howevera geometrically linear approximation as proposed already in Love (1911) is usually adopted. Along similar lines Barber(2004) investigates the stresses induced in the earth’s crust by the gravitational forces exerted by a massive asteroid passingclose to the earth. An existence theorem for Newtonian gravitation coupled to geometrically nonlinear elasticity, based on asimplified Hooke-type elasticity law, is proven in Beig and Schmidt (2003), and time-independent configurations of twogravitating elastic bodies are constructed in Beig and Schmidt (2008).
The present manuscript aims to combine the pertinent equations of geometrically nonlinear continuum mechanics, spe-cialized to the case of elasticity for the sake of concreteness, with the continuum version of Newton’s law of universal grav-itation. To this end we first reiterate the relevant relations of Newtonian gravitation. We then combine Newtoniangravitation and nonlinear continuum mechanics into what we call continuum gravito-mechanics. Thereby, the presentationrests heavily on the introduction of so-called gravitational stresses and in particular on the introduction of total stresses, aconcept that we borrow again from nonlinear electro-elasticity. Likewise we investigate the contribution of Newtonian grav-itation on the formulation of nonlinear continuum thermomechanics. To this end we endeavor to reformulate the balance ofenergy and the balance of entropy (including a positive entropy production term) so as to incorporate the previously intro-duced total stresses. Finally, for the conservative case and based on the notion of a total potential energy we set up a var-iational formulation that renders as the Euler–Lagrange equations exactly the field equations and boundary conditions asconsidered in the previous sections. The variational setting will serve as a prerequisite for a computational treatment in alater contribution.
2. Recapitulation of Newtonian gravitation
In Newtonian gravitation two heavy point masses attract each other with a force, oriented along the direction vector con-necting the masses, that is proportional to the masses and inversely proportional to the square of their separation distance(see Newton, 1686) for the origin of this concept. Thus, the force fij exerted on mass mi due to the presence of mass mj isgiven by
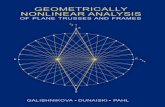
Fig. 1.(a) theforce ex
fij ¼ cmimj
jrijj2rij
jrijj: ð1Þ
Here rij = rj � ri denotes the direction vector pointing from the mass mi located at ri to the mass mj located at rj, see Fig. 1. Theproportionality constant c is the gravitational constant and takes the value
c ¼ 6:67428 � 10�11 m3
kg s2 : ð2Þ
Obviously, e.g. Coulomb’s law of electro-statics formally follows the paradigm of Newtonian gravitation as an action at a dis-tance with the difference that mass can only take positive values as opposed to charge. Moreover charges of equal sign repeleach other whereas masses always exert an attractive force on each other. We introduce the normalized force gij exerted onmass i due to the presence of mass j as the gravitational vector
gij ¼ cmj
jrijj2rij
jrijj: ð3Þ
For the case of many discrete masses the resulting gravitational vector gi at location i due to the presence of massesj = 1, . . . ,nma, with nma the number of masses, is simply computed by superposition
System of discrete masses at locations ri, rj, rk with direction vector rik = rk � ri pointing from the mass mi located at ri to the mass mk located at rk. Inforce fij exerted on mass mi due to the presence of mass mj is depicted, in (b) the corresponding gravitational vector gij , defined as the normalizederted on mass mi due to the presence of mass mj, is shown.

1454 P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460
gi ¼ cXnma
j¼1
mj
jrijj2rij
jrijj: ð4Þ
Accordingly, for a continuous distribution of mass with q(x0) denoting the mass density at the field point x0, the correspond-ing gravitational field gðxÞ at the source point x follows from
gðxÞ ¼ cZS
qðx0Þjx0 � xj2
x0 � xjx0 � xjdv: ð5Þ
Here S denotes the whole space so that all field points x0 2 S. Note again that, e.g., the electric field in electro-statics com-pares formally to the gravitational field. Next, considering the divergence of the integrand with respect to the source point x,i.e.
divxx0 � x
jx0 � xj3
!¼ �4pdðx� x0Þ; ð6Þ
renders, based on the well-known properties of the Dirac distribution d(x), as a fundamental result the Gauss-type law ofNewtonian gravitation, i.e. sinks of the gravitational field are due to (positive) mass density
divxgðxÞ ¼ �4pcqðxÞ: ð7Þ
Furthermore, the gradient with respect to the source point x of the inverse distance to a field point x0, i.e.
rx1
jx0 � xj
� �¼ x0 � x
jx0 � xj3; ð8Þ
introduces a potential u(x), the so-called gravitational potential, for the gravitational field, i.e.
uðxÞ ¼ u0 � cZS
qðx0Þjx0 � xjdv ; ð9Þ
where u0 is a constant of integration. Thus the gravitational field follows from
gðxÞ ¼ �rxuðxÞ ð10Þ
with the consequence that g has a vanishing curl, i.e. curlg ¼ 0. Furthermore, the Poisson equation
DxuðxÞ ¼ 4pcqðxÞ ð11Þ
determines the gravitational potential from the spatial distribution of mass density. The gravitational field g has the sameunits as acceleration, i.e. m/s2, thus the gravitational potential u has the same units as velocity squared, i.e. [m/s]2. In sum-mary the force exerted on a small test mass m in the gravitational field g is given by
f ¼ mg: ð12Þ
Thus the power expended by moving a test mass an infinitesimal distance dx against a gravitational field is computed as
�mg � dx ¼ mrxu � dx ¼ mdu; ð13Þ
so that the gravitational potential u(x) takes the interpretation of the work performed to move a test mass from infinity tothe point x normalized by the test mass
uðxÞ ¼ �Z x
1gðx0Þ � dx0: ð14Þ
3. Nonlinear continuum gravito-mechanics
Here we consider a material body consisting of matter occupying its material configuration B0 surrounded by free spacethat occupies the material configuration S0, see Fig. 2. Due to the deformation of the body the matter and the free space willoccupy spatial configurations Bt and St , however with B0 [ S0 ¼ Bt [ St . The boundary of the body @B0 in the material con-figuration defines the interface between free space and matter. The deformation is locally characterized by the deformationgradient F =rX u, i.e. the material gradient of the nonlinear deformation map x = u(X) with the material coordinate X 2 B0.Note that even if there is no matter outside the body and thus there exists no physical deformation map u in free space thatjustifies a material setting, we may nevertheless imagine a fictitious deformation map u that extends u = u(X) from the bodyto its exterior. In the context of a geometrically nonlinear formulation we shall distinguish tensor fields in the tangent spaceto the spatial configuration by those in the tangent space to the material configuration by using lower and upper case letters,respectively. Moreover, two-point tensor fields will also be denoted by capital letters. Finally densities per unit volume in thematerial configuration will be discriminated from densities per unit volume in the spatial configuration by sub-indexes 0 ort, respectively.

Fig. 2. Material body consisting of matter occupying its material configuration B0 surrounded by free space that occupies the material configuration S0. Theboundary of the body @B0 in the material configuration defines the interface between free space and matter.
P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460 1455
3.1. Balance of mass
The Gauss-type law of Newtonian gravitation may be expressed with respect to the material or the spatial configuration,i.e. in terms of the divergence operator with respect to the material or the spatial coordinates, whereby q0 and qt denote thecorresponding mass densities, respectively, as
DivM ¼ �q0 and divm ¼ �qt: ð15Þ
Here we introduced besides the spatial gravitational field g the scaled spatial gravitational field m together with the corre-sponding referential quantities
G ¼ g � F and M ¼ m � cofF: ð16Þ
Thereby the referential quantities follow from appropriate pull-back operations (i.e. either by the chain rule or the Piolatransformation in terms of the co-factor cofF of F) from their spatial counterparts. Note the different flavors of the vectorfields g and m arise from being transformed either co- or contravariantly. The scaled gravity field reads explicitly
M ¼ 14pc
JB �G and m ¼ 14pc
g: ð17Þ
Here J denotes the Jacobian determinant J = detF and B is the inverse Cauchy–Green (or rather the Piola) strain B = [Ft � F]�1.Since we do not consider separate mass densities distributed at the boundary of the body, the corresponding jump condi-tions follow from the usual pill-box argument applied to the Gauss-type law of Newtonian gravitation as
sMt � N ¼ 0 and smt � n ¼ 0: ð18Þ
Here N and n denote the outward pointing normal to the material and spatial boundary of the body, respectively, i.e. pointingfrom matter to free space, and the jump of a quantity (�) at @B0 is defined as s(�)t = (�)free space � (�)matter. From the definitionof the gravitational field as the gradient of the (continuous, i.e. sut = 0) gravitational potential and again from a pill-boxargument we obtain tangential continuity of the gravity field. Moreover, the additional normal continuity of the scaled grav-itational field renders the overall continuity of m across surfaces and thus the continuity of the gradient rxu of the gravi-tational potential
n� sgt ¼ 0! smt ¼ 0 and srxut ¼ 0: ð19Þ
The resultant mass M of the body follows with the help of the Gauss-type law of Newtonian gravitation as
M ¼ZBt
qtdv ¼ �ZBt
divmdv ¼ �Z@Bt
m � nda: ð20Þ
Likewise, expressed in referential quantities we obtain
M ¼ZB0
q0dV ¼ �ZB0
DivMdV ¼ �Z@B0
M � NdA: ð21Þ
Thus we may conclude the following useful relations between the gravitational field at the boundary of the body and thetotal mass of the body
Z@Bt
g � nda ¼ �4pcM andZ@B0
JG � B � NdA ¼ �4pcM: ð22Þ

1456 P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460
The conservation of mass renders eventually q0 = q0(X) and thus M ¼MðXÞwhich, however, does not contradict G ¼ GðX; tÞdue to the dependence of G on F = F(X, t).
3.2. Balance of linear momentum
Next we introduce a (free space) gravitational energy density G0 = JGt per referential unit volume or Gt per spatial unit vol-ume, respectively, (compare to the similar case of electro-mechanics)
G0 ¼ G0ðF;GÞ ¼12
G �MðF;GÞ and Gt ¼12
g �m: ð23Þ
The corresponding Piola-type gravitational stress Pgrv = rgrv � cofF is then
Pgrv ¼ @G0
@F¼ GtcofF � g�M: ð24Þ
For the above derivation we used the helpful intermediate result
@B@F¼ �½F�1 � Bþ B � F�1�: ð25Þ
The special dyadic products� and� order indices so that ½F�1 � B�IJkL ¼ ½F�1�Ik½B�JL and [B � F�1]IJkL = [B]IL [F�1]Jk, respectively.
Moreover, in our index notation lower case and upper case indices refer to the spatial and material base vectors, respectively.Then the obviously symmetric Cauchy-type gravitational stress rgrv is expressed as
rgrv ¼ Gti� g�m ¼ 14pc
12jgj2i� g� g
� �: ð26Þ
In the above i denotes the second-order spatial unit tensor with coefficients dij. It is now straightforward to prove that thedivergence of the Cauchy-type gravitational stress renders
divrgrv ¼ �gdivmþm� curlg ¼ qtg: ð27Þ
To derive the previous result we used the following identity
m� curlg ¼ m � rxg�rxg �m: ð28Þ
Likewise for the jump of the Cauchy-type gravitational stress one obtains
srgrvt ¼ fmg � sgti� fgg � smt� sgt� fmg: ð29Þ
Here {(�)} denotes the average of a quantity (�) across the boundary of the body. Accordingly, based on the previous results forthe jumps in g and m we obtain for the jump in the gravitational traction the obvious result
srgrvt � n ¼ �fggsmt � nþ fmg � n� sgt½ � ¼ 0: ð30Þ
To prove the previous result the following useful identity is used
fmg � ½n� sgt� ¼ ½fmg � sgt�n� ½fmg � n�sgt: ð31Þ
It is interesting to note that the divergence statement for the gravitational stress is also obtained directly (after somestraightforward manipulations) by multiplying the Gauss-type law of Newtonian gravitation by the gradient of the gravita-tional potential. This is in line with Noether’s theorem that associates additional conservation laws (here the divergence-freegravitational stress in vacuum) with the field equations (here the Gauss-type law of Newtonian gravitation).
Next we compute the resultant gravitational force acting on the body expressed in terms of a distributed volume force
ZBtqtgdv ¼ZBt
bgrvt dv ¼
ZBt
divrgrvdv ¼Z@Bt
rgrv � nda: ð32Þ
Thus the resultant gravitational force exerted on the body may be expressed by a distributed gravitational volume force bgrvt
(and vanishing gravitational traction densities tgrvt )
bgrvt ¼ divrgrv ¼ qtg ðand tgrv
t ¼ 0Þ: ð33Þ
With these preliminary results at hand the global format for the (quasi-static) balance of linear momentum is stated as
0 ¼Z@Bt
ttdaþZBt
½bt þ bgrvt �dv : ð34Þ
Here tt and bt, respectively, denote the mechanical tractions at the surface of the body and all other distributed body forcesexcept gravity, which is already contained in bgrv
t . With the Cauchy theorem tt = r � n the corresponding localized form of thebalance of momentum then reads
0 ¼ divrþ bt þ bgrvt ¼ divrtot þ bt with r � n ¼ tt : ð35Þ

P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460 1457
In the above we introduced the total Cauchy stress that comprises both mechanical and gravitational parts as
rtot ¼ rþ rgrv: ð36Þ
The total Cauchy stress has to satisfy the following boundary condition in terms of the (prescribed) mechanical traction andan additional gravitational traction
rtotmatter � n ¼ tt þ rgrv
free space � n: ð37Þ
In referential quantities the (quasi-static) balance of linear momentum reads
0 ¼ DivP þ b0 þ bgrv0 ¼ DivPtot þ b0 with P � N ¼ t0 ð38Þ
with the total Piola stress defined as follows
Ptot ¼ P þ Pgrv: ð39Þ
Obviously the total Piola stress has to satisfy the following boundary condition
Ptotmatter � N ¼ t0 þ Pgrv
free space � N: ð40Þ
3.3. Balance of angular momentum
The resultant gravitational moment acting on the body expressed in terms of a distributed volume couple is
ZBtx� ½qtg�dv ¼ZBt
x� bgrvt dv ¼
ZBt
cgrvt dv : ð41Þ
Thus, the gravitational volume couple cgrvt may be expressed in terms of the symmetric gravitational Cauchy stress as
cgrvt ¼ x� bgrv
t ¼ divðx� rgrvÞ: ð42Þ
With these preliminaries at hand the global form of the (quasi-static) balance of angular momentum is
0 ¼Z@Bt
x� ttdaþZBt
½x� bt þ cgrvt �dv : ð43Þ
Thus, incorporating the (quasi-static) balance of momentum the corresponding localized format then reads straightfor-wardly as
0 ¼ divðx� rtotÞ þ x� bt ¼ i� rtot: ð44Þ
Here the cross product of two second order tensors a and b is defined as a � b = e:[a � bt] with e denoting the third orderpermutation tensor. Of course this is nothing but the symmetry condition for the total Cauchy stress and thus also for themechanical Cauchy stress. In terms of axial vectors these conditions read
axlrtot ¼ 0 and axlr ¼ 0: ð45Þ
We remark that this is a much simpler situation as compared to the case of nonlinear electro-elasticity that displays a non-symmetric mechanical Cauchy stress due to the presence of polarization.
4. Nonlinear continuum gravito-thermo-mechanics
4.1. Balance of energy
Before stating the balance of energy we express the resultant working of the distributed gravitational volume forces in ref-erential quantities as
ZB0
bgrv0 � vdV ¼
Z@B0
v � Pgrv � NdA�ZB0
Pgrv : rXvdV : ð46Þ
Here, v ¼ _u denotes the usual velocity field. Then the global form of the balance of the standard internal energy (recall thatwe do restrict ourselves to the quasi-static case), expressed in terms of its density e0 per unit volume in the reference con-figuration, reads as
ZB0
_e0dV ¼ Eextsur þ Eext
vol : ð47Þ

1458 P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460
Here the external power input Esurext across the surface of the body is due to the working of the mechanical and gravitational
forces (mechanical and gravitational power input) together with the thermal power input due to a Piola-type heat flux H
Eextsur ¼
Z@B0
v � ½t0 þ Pgrv � N� � H � N½ �dA: ð48Þ
Likewise the external power input Eextvol within the body is due to the working of the distributed mechanical and gravitational
forces (mechanical and gravitational power input) together with the thermal power input due to referential heat sources h0
Eextvol ¼
ZB0
v � b0 � Pgrv : _F þ h0
h idV : ð49Þ
Localizing the above statement renders merely the usual format for the balance of (internal) energy that, however, does notinvolve the total Piola stress but only the common mechanical Piola stress
_e0 � P : _F þ DivH � h0 ¼ 0: ð50Þ
Since we want to express the localized balance of energy in terms of the working of the total Piola stress Ptot we prefer toexpress the global form of the balance of energy as
ZB0
_etot0 dV ¼ Eext
sur þ Eextvol : ð51Þ
Here etot0 ¼ e0 þ G0 denotes the total (internal) energy that includes explicitly the previously introduced gravitational energy
G0. Thereby, based on the above definition of G0 ¼ G0ðF;GÞ, we observe that
_G0 ¼ Pgrv : _F þM � _G: ð52Þ
It is simple to verify that the external power input Eextsur across the surface of the body is indeed unmodified, however it now
proves more convenient to express it in terms of the working of the total Piola traction as
Eextsur ¼
Z@B0
½v � Ptot � H� � NdA: ð53Þ
The modified external power input Eext⁄vol within the body, however, now takes a slightly different expression
Eextvol ¼
ZB0
v � b0 þM � _Gþ h0� �
dV : ð54Þ
Consequently, the localized format for the balance of the total (internal) energy etot0 follows as
_etot0 � Ptot : _F �M � _Gþ DivH � h0 ¼ 0: ð55Þ
Observe that the above statement now includes the working of the total Piola stress Ptot, as desired. In addition there is apower density term related to the referential scaled gravitational field M.
4.2. Balance of entropy
The global format of the balance of entropy, expressed in terms of its density per unit volume r0 in the reference config-uration, reads as
ZB0
_r0dV ¼ �Z@B0
h�1H � NdAþZB0
h�1½h0 þ d0�dV : ð56Þ
Here we have directly incorporated the common assumption for the entropy flux and the entropy source as being expressedin terms of the corresponding heat flux and heat source divided by the absolute temperature h > 0 (as the integrating denom-inator). Likewise, the entropy production is expressed in terms of the dissipation power density d0 and is restricted to bepositive
ZB0
h�1d0dV P 0 and d0 P 0: ð57Þ
Localizing the above statement eventually renders
d0 ¼ ½DivH � h0� þ _r0h�rX ln h � H P 0: ð58Þ
Next we introduce the Helmholtz energy density as the Legendre transformation of the internal energy in order to exchangethe entropy density for the absolute temperature in the parametrization of the energy as
w0ðF; h; � � �Þ ¼ e0ðF;r0; � � �Þ � hr0: ð59Þ

P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460 1459
Furthermore, incorporating the standard version of the balance of (internal) energy renders the common version of the dis-sipation power density inequality that, however, does not incorporate the power expended by the total Piola stress, as
d0 ¼ P : _F � _w0 � r0_h�rX ln h � H P 0: ð60Þ
Alternatively, incorporating the balance of energy in terms of the power expended by the total Piola stress renders finally thedesired result
d0 ¼ Ptot : _F þM � _G� _wtot0 � r0
_h�rX ln h �H P 0: ð61Þ
Here wtot0 ¼ w0 þ G0 abbreviates the total free energy. The above dissipation power density inequality is well-suited for deter-
mining the constitutive expressions for the total Piola stress Ptot and the referential scaled gravitational field M. For example,with the restriction to thermo-hyperelasticity, i.e. w0 = w0(F,h) and based on a standard Coleman–Noll exploitation argumentwe obtain for the constitutive relations incorporating the gravitational energy density
Ptot ¼ @wtot0
@F; r0 ¼ �
@wtot0
@hand M ¼ @w
tot0
@G: ð62Þ
Finally, the reduced or in this case rather the conductive dissipation power density inequality remains as usual as
dcon0 ¼ �rX ln h � H P 0: ð63Þ
The conductive dissipation power density inequality may be satisfied by the common Fourier law of heat conduction.
5. Variational setting of nonlinear gravito-elasticity
For the case of isothermal gravito-elasticity we define the total internal potential energy density W0 at the fixed referencetemperature h = href by
W0ðF;GÞ ¼ G0ðF;GÞ þ w0ðF; hÞjh¼href: ð64Þ
Then the total potential energy densities U0 and u0 in the bulk and at the surface of the body, respectively, are written as
U0ðu; F;u;GÞ ¼W0ðF;GÞ þ V0ðu;uÞ and u0 ¼ u0ðuÞ: ð65Þ
Here V0(u,u) denotes the external potential energy density in the bulk parameterized in the deformation map u and thegravitational potential u, the external potential energy density at the surface of the body only depends on the deformationmap u (since there are no separate surface mass densities). Consequently the constitutive relations for gravito-elasticity ex-pressed in terms of the total potential energy density U0 in the bulk are
Ptot ¼ @U0
@Fand M ¼ @U0
@G: ð66Þ
Moreover, the mechanical body forces b0 and the mechanical tractions t0 together with the mass density q0 are defined viathe external potential energy densities as
b0 ¼ �@U0
@u; t0 ¼ �
@u0
@uand q0 ¼
@U0
@u: ð67Þ
With these preliminary results at hand we define a total energy functional as
Iðu;uÞ ¼ZS0
G0ðF;GÞdV þZB0
U0ðu; F;u;GÞdV þZ@B0
u0ðuÞdA: ð68Þ
For the sake of simplicity of exposition we shall ignore any energy contributions from the boundary of the free space @S1 atinfinity in this contribution. Then we seek a stationary point of the above defined functional
Iðu;uÞ ! stat: ð69Þ
Using the previous definitions the variation of I(u,u) with respect to u renders
ZS0rXdu : PgrvdV þZB0
½rXdu : Ptot � du � b0�dV �Z@B0
du � t0dA ¼ 0: ð70Þ
Requiring the above variational statement to hold for all admissible du results in the following Euler–Lagrange equations
DivPtot ¼: � b0 in B0 and DivPgrv ¼: 0 in S0 ð71Þ
together with the jump or boundary condition at @B0
sPtott � N ¼: � t0 ) Ptot
matter � N ¼: t0 þ Pgrv
free space � N: ð72Þ
Likewise the variation of I(u,u) with respect to u produces

1460 P. Steinmann / International Journal of Engineering Science 49 (2011) 1452–1460
ZS0
rXdu �MdV þZB0
½rXdu �M� duq0�dV ¼ 0: ð73Þ
Requiring the above variational statement to hold for all admissible du results in the following Euler–Lagrange equations
DivM ¼: � q0 in B0 and DivM ¼: 0 in S0 ð74Þ
together with the jump or boundary condition at @B0
sMt � N ¼: 0 ) Mmatter � N ¼Mfree space � N: ð75Þ
Thus, in conclusion, the variational problem formulated as above renders the relevant field equations and boundary conditionsof coupled nonlinear gravito-elasticity. Clearly a variational setting is a necessary prerequisite for certain computationaltreatments such as the finite element method.
6. Conclusion
Inspired by the formal similarity of Newton’s universal law of gravitation as the paradigm of an action at a distance to the(more recent) Coulomb’s law of electro-statics we formulated a straightforward theory of nonlinear gravito-elasticity. Theresultant formulation resembles the by now well-established theory of electro-elasticity. Geometrically nonlinear gravito-elasticity is restricted to situations where neither the gravitational potential nor the velocity (squared) of the objects con-sidered take values in the order of the speed of light (squared). Under these restrictions the theory applies to heavy bodieswith finite extent that are capable of nonlinear elastic deformations. Paradigmatic examples are from the area of geophysics,where changes in the gravitational field measured by current micro-gravity instrumentation and the associated deforma-tions in the earth’s crust are attributed to geodetic precursors to volcanic eruptions. In particular the variational setting pro-duces the pertinent coupled equations and boundary conditions and will serve as a starting point for a computationaltreatment in a later contribution.
References
Barber, J. R. (2004). Stresses in a half space due to Newtonian gravitation. Journal of Elasticity, 75, 187–192.Beig, R., & Schmidt, B. G. (2003). Static self-gravitation elasticity bodies. Proceedings of Royal Society of London A, 459, 109–115.Beig, R., & Schmidt, B. G. (2008). Celestial mechanics of elastic bodies. Mathematische Zeitschrift, 258, 381–394.Charo, M., Fernandez, J., Luzon, F., & Rundle, J. B. (2006). On the relative importance of self-gravitation and elasticity in modeling volcanic ground
deformation and gravity changes. Journal of Geophysical Research, 111, 1–12. B03404.Charo, M., Luzon, F., Fernandez, J., & Tiampo, K. F. (2007). Topography and self-gravitation interaction in elastic-gravitational modeling. Geochemistry,
Geophysics, Geosystems, 8, 1–11. Q01001.Dorfmann, A., & Ogden, R. W. (2005). Nonlinear electroelasticity. Acta Mechanica, 174(12), 167–183.Eringen, AC., & Maugin, G. A. (1990). Electrodynamics of continua. Springer.Hoskins, L. M. (1909). The strain of a gravitating compressible elastic sphere. Transactions on American Mathematical Society, 11, 203–248.Hoskins, L. M. (1921). The strain of a gravitating sphere of variable density and elasticity. Transactions on American Mathmatical Society, 21, 1–43.Love, A. E. H. (1911). Some problems in geodynamics. Cambridge University Press.Maugin, G. A. (1988). Continuum mechanics of electromagnetic solids. North-Holland.I. Newton, Philosophiae Naturalis Principia Mathematica, 1686.Vu, D. K., Steinmann, P., & Possart, G. (2007). Numerical modelling of nonlinear electroelasticity. International Journal of Numerical Methods in Engineering, 70,
685–704.Vu, D. K., & Steinmann, P. (2010). A 2D coupled BEM-FEM simulation of electro-elastostatics at large strain. Computer Methods in Applied Mechanics and
Engineering, 199, 1123–1124.