Geometric Properties of Singular Extremals for a …grw/Publications/DCDS.pdfGeometric Properties of...
30
Geometric Properties of Singular Extremals for a Submerged Rigid Body M. Chyba ∗ † , T. Haberkorn ‡ , R.N. Smith, G.R. Wilkens § Department of Mathematics, Department of Ocean & Resources Engineering University of Hawaii, Honolulu, HI 96822 Email: [email protected], [email protected], [email protected], [email protected] September 5, 2007 Abstract In this paper we examine the submerged rigid body as motivation for the exten- sion of the notion of decoupling vector fields to include motion in a viscous fluid. We give a relationship between decoupling vector fields and the singular extremals for the system which links the optimization of the motion planning problem to the inherent geometric framework. We end by showing how this connection is ap- plied to the creation of time efficient trajectories which are implementable onto a test-bed autonomous underwater vehicle (AUV). 1 Introduction Practical applications of autonomous robots such as the Mars Rover ”Spirit” or the AUV ”ABE” motivate research on the control of mechanical systems. From a mathe- matical point of view such robots fall into the class of simple mechanical systems; their Lagrangian is of the form kinetic minus potential energy. These systems can be char- acterized by differential geometric properties through the study of geometric control. Recent treatments of this topic found in [3] display that this geometric framework is the correct architecture to study the practical applications of simple mechanical systems. The otherwise complex nonlinearity of such systems can be exploited using differential ∗ AMS Classifications: 49-XX,70EXX,93CXX † Research supported in part by NSF grant DMS-030641 ‡ Research supported by NSF grant DMS-030641 § Research supported by NSF grant DMS-030641 1
Transcript of Geometric Properties of Singular Extremals for a …grw/Publications/DCDS.pdfGeometric Properties of...

Geometric Properties of Singular Extremalsfor a Submerged Rigid Body
M. Chyba∗†, T. Haberkorn‡, R.N. Smith, G.R. Wilkens§
Department of Mathematics,Department of Ocean & Resources Engineering
University of Hawaii, Honolulu, HI 96822Email: [email protected],
[email protected], [email protected],[email protected]
September 5, 2007
Abstract
In this paper we examine the submerged rigid body as motivation for the exten-sion of the notion of decoupling vector fields to include motion in a viscous fluid.We give a relationship between decoupling vector fields and the singular extremalsfor the system which links the optimization of the motion planning problem to theinherent geometric framework. We end by showing how this connection is ap-plied to the creation of time efficient trajectories which are implementable onto atest-bed autonomous underwater vehicle (AUV).
1 Introduction
Practical applications of autonomous robots such as the Mars Rover ”Spirit” or theAUV ”ABE” motivate research on the control of mechanical systems. From a mathe-matical point of view such robots fall into the class of simple mechanical systems; theirLagrangian is of the form kinetic minus potential energy. These systems can be char-acterized by differential geometric properties through the study of geometric control.Recent treatments of this topic found in [3] display that this geometric framework is thecorrect architecture to study the practical applications of simple mechanical systems.The otherwise complex nonlinearity of such systems can be exploited using differential
∗AMS Classifications: 49-XX,70EXX,93CXX†Research supported in part by NSF grant DMS-030641‡Research supported by NSF grant DMS-030641§Research supported by NSF grant DMS-030641
1

geometric control properties. This allows us to consider the motion planning problemand investigate optimization of such systems. Due to simplifications or alternate con-trol formulations, optimization has been previously unaddressable for systems such asunderwater vehicles.
Under this geometric architecture, the time minimum problem for a submergedrigid body has been examined in [7, 8, 9, 10, 11] which mainly focus on the conditionsfor an extremal to be singular. Here we revisit these resultsand generalize them toinclude the rigid body submerged in a viscous fluid. We show a relationship betweenthese singular extremals and the geometric notion of decoupling vector fields whichgives insight into the motion planning problem for the submerged rigid body. Decou-pling vector fields are computed for the fully-actuated and under-actuated scenerios ofa six degree-of-freedom (DOF) underwater vehicle submerged in an ideal fluid. It isan open question and area of current research to characterize and classify decouplingvector fields for such a vehicle submerged in a real fluid. It isthe geometric propertiesof the singular extremals and their relationship to decoupling vector fields which weexamine to help answer this open question.
2 Equations of Motion
We derive the equations of motion for a controlled rigid bodyimmersed in an idealfluid (air) and in a real fluid (water). By real fluid, we mean a fluid which is viscousand incompressible with rotational flow. Here, we consider water to be viscous fluid(real fluid) in order to emphasize the inclusion of the dissipative terms in the equationsof motion. This motivation comes from our desire to apply ourresults to the design oftrajectories for test-bed underwater vehicles.
In the sequel, we identify the position and the orientation of a rigid body withan element of SE(3): (b,R). Hereb = (b1,b2,b3)
t ∈ R3 denotes the position vec-
tor of the body, andR∈ SO(3) is a rotation matrix describing the orientation of thebody. The translational and angular velocities in the body-fixed frame are denoted byν = (ν1,ν2,ν3)
t andΩ = (Ω1,Ω2,Ω3)t respectively. Notice that our notation differs
from the conventional notation used for marine vehicles. Usually the velocities in thebody-fixed frame are denoted by(u,v,w) for translational motion and by(p,q, r) for ro-tational motion, and the spatial position is usually taken as(x,y,z). However, since thispaper focuses on the theory, the chosen notation will prove more efficient especiallyfor the use of summation notation in our results.
It follows that the kinematic equations for a rigid body are given by:
b = Rν (1)
R= RΩ (2)
where the operator ˆ :R3 → so(3) is defined by ˆyz= y× z; so(3) being the space ofskew-symmetric 3×3 matrices.
To derive the dynamic equations of motion for a rigid body, welet p be the totaltranslational momentum andπ be the total angular momentum, in the inertial frame.Let P andΠ be the respective quantities in the body-fixed frame. It follows that ˙p =
2

∑ki=1 fi , π = ∑k
i=1(xi fi)+ ∑li=1 τi where fi (τi) are the external forces (torques), given
in the inertial frame, andxi is the vector from the origin of the inertial frame to the lineof action of the forcefi . To represent the equations of motion in the body-fixed frame,we differentiate the relationsp = RP, π = RΠ + b p to obtain
P = PΩ +EF (3)
Π = ΠΩ + Pν +k
∑i=1
(Rt (xi −b))×Rt fi +ET (4)
whereEF = Rt (∑ki=1 fi) andET = Rt (∑l
i=1 τi) represent the external forces and torquesin the body-fixed frame respectively.
To obtain the equations of motion of a rigid body in terms of the linear and angularvelocities, we need to compute the total kinetic energy of the system. The kineticenergy of the rigid body,Tbody, is given by:
Tbody=12
(
vΩ
)t(mI3 −mrCG
mrCG Jb
)(
vΩ
)
(5)
wherem is the mass of the rigid body,I3 is the 3×3-identity matrix andrCG is a vectorwhich denotes the location of the body’s center of gravity with respect to the origin ofthe body-fixed frame.Jb is the body inertia matrix. Based on Kirchhoff’s equations[17] we have that the kinetic energy of the fluid,Tf luid , is given by:
Tf luid =12
(
vΩ
)t( M f Ctf
Cf Jf
)(
vΩ
)
(6)
whereM f ,Jf andCf are respectively referred to as the added mass, the added massmoments of inertia and the added cross-terms. These coefficients depend on the densityof the fluid as well as the body geometry. Summarizing, we haveobtained that the totalkinetic energy of a rigid body submerged in an unbounded ideal or real fluid is givenby:
T =12
(
vΩ
)t(I11 I12
It12 I22
)(
vΩ
)
, (7)
(
I11 I12
It12 I22
)
=
(
mI3 +M f −mrCG +Ctf
mrCG +Cf Jb +Jf
)
(8)
This can also be written asT = 12(νt I11ν + 2νtI12Ω + ΩtI22Ω). UsingP = ∂T
∂ν and
Π = ∂T∂Ω , we have:
(
PΠ
)
=
(
mI3 +M f −mrCG +Ctf
mrCG +Cf Jb +Jf
)(
νΩ
)
. (9)
The kinetic energy of a rigid body in an interconnected-mechanical system is repre-sented by a positive-semidefinite(0,2)-tensor field on the configuration spaceQ. Thesum over all the tensor fields of all bodies included in the system is referred to as the
3

kinetic energy metricfor the system. In this paper, the mechanical system is composedof only one rigid body, and the kinetic energy metric is actually a Riemannian metricgiven by onQ = SE(3)×R3:
G =
(
M 00 J
)
(10)
For the rest of this paper, we take the origin of the body-fixedframe to beCG, inother words, ˆrCG = 0. Moreover, we assume the body to have three planes of symmetrywith body axes that coincide with the principal axes of inertia. This implies thatJb, M f
andJf are diagonal, whileCf is zero. We have the equationsP = (mI3 +M f )ν = Mνand Π = (Jb + Jf )Ω = JΩ whereM = mI3 + M f and J = Jb + Jf . It follows fromequations (3) and (4) that
Mν = Mν ×Ω +EF (11)
JΩ = JΩ×Ω +Mν ×ν +k
∑i=1
(Rt(xi −b))×Rt fi +ET (12)
The termsMν ×Ω, JΩ×Ω andMν × ν account for the Coriolis and centripetal ef-fects. These effects can also be expressed in the language ofdifferential geometry viaa connection, see [3] for a treatise on affine differential geometric control. A Rieman-nian metric determines a unique affine connection which is both symmetric and metriccompatible. ThisLevi-Civita connectionprovides the appropriate notion of accelera-tion for a curve in the configuration space by guarenteeing that the acceleration is infact a tangent vector field alongγ. This setting for acceleration is handled by jet bun-dles which can be studied in depth in [24]. Explicitly, ifγ(t) = (b(t),R(t)) is a curvein SE(3), andγ ′(t) = (ν(t),Ω(t)) is its pseudo-velocity, the acceleration is given by
∇γ ′γ ′ =
(
ν +M−1(
Ω×Mν)
Ω+J−1(
Ω×JΩ + ν×Mν)
)
, (13)
where∇ denotes the Levi-Civita connection and∇γ ′γ ′ is the covariant derivative ofγ ′ with respect to itself. The affine connection formulation ofour system will be usedlater in our paper to establish a connection between singular extremals and decouplingvector fields.
Gravity, buoyancy and dissipative forces can be modeled by adding external forcesand torquesfi andτi . We assume the vehicle to be neutrally buoyant, which meansthat the buoyancy force and the gravitational force are equal. Since the origin of thebody-fixed frame isCG, the only moment due to the restoring forces is the rightingmoment−rCB ×RtρgV k, whererCB is the vector fromCG to the center of buoyancyCB, ρ is the fluid density,g the acceleration of gravity,V the volume of displaced fluidandk the unit vector pointing in the direction of gravity.
Additional hydrodynamic forces experienced by a rigid bodysubmerged in a realfluid are due to drag effects. We assume here that form drag is dominant for our appli-cation (specific AUV test-bed) and our estimations of this include any other drag terms(such as fluid sheer stresses due to rotational viscous flow).In this paper, we makethe assumption that we have a drag forceDν (ν) and a drag momentumDΩ(Ω), we
4

neglect the off-diagonal terms. The contribution of these forces is quadratic in the ve-locities, more precisely we have Drag= CDρA|νi |νi whereCD is the drag coefficient,ρ is the density of the fluid andA is the projected surface area of the object. The dragforce and momentum are then non differentiable functions which causes difficulties intheoretical analysis. To overcome this, some assume the vehicle to move in a singledirection, hence|νi |νi = ν2
i . We do not want to make this assumption, because at leastrotations are needed in both directions. Experimental results for our test-bed vehiclesuggest that the total drag force versus velocity can be approximated by a cubic func-tion with no quadratic or constant term. This is what we assume here. To summarize,the translational drag is given byDν(ν) = diag(Di1
ν ν3i +Di2
ν νi) and the rotational dragby DΩ(Ω) = diag(Di1
ΩΩ3i +Di2
ν Ωi) whereDi jν , Di j
Ω are the constant drag coefficients.
DEFINITION 2.1. Under our assumptions, the equations of motion in the body-fixedframe for a rigid body submerged in a real fluid are given by:
Mν = Mν ×Ω +Dν(ν)ν + ϕν
JΩ = JΩ×Ω +Mν ×ν +DΩ(Ω)Ω− rCB ×RtρgV k+ τΩ(14)
whereM accounts for the mass and added mass,J accounts for the body momentsof inertia and the added moments of inertia. The matricesDν(ν),DΩ(Ω) representthe drag force and drag momentum, respectively. The term−rCB ×RtρgV k is therighting moment induced by the buoyancy force. Finally,ϕν = (ϕν1,ϕν2,ϕν3)
t andτΩ = (τΩ1,τΩ2,τΩ3)
t account for the control. For a rigid body moving in ideal fluid(air), we neglect the drag effects:Dν (ν) = DΩ(Ω) = 0.
REMARK 2.2. In (14) we assume that we have three forces acting at the center ofgravity along the body-fixed axes and that we have three pure torques about these threeaxes. We will refer to these controls as the six DOF controls.This is not realistic froma practical point of view since underwater vehicle controlsmay represent the action ofthe vehicle’s thrusters or actuators. The forces from theseactuators generally do not actat the center of gravity and the torques are obtained from themomenta created by theforces. As a consequence, to set up experiments with a real vehicle, we must computethe transformation between the six DOF controls and the controls corresponding to thethrusters. We address such a transformation for our actual test-bed vehicle in [4].
Together, equations (1), (2) and (14) form a first-order affine control system onthe tangent bundleT SE(3) which represents the second-orderforced affine-connectioncontrol systemon SE(3)
∇γ ′γ ′ =
(
M−1(
Dν (ν)ν + ϕν)
J−1(
DΩ(Ω)Ω− rCB ×RtρgV k+ τΩ)
)
. (15)
Introducingσ = (ϕν ,τΩ), equation (15) takes the form:
∇γ ′γ ′ = Y(γ(t))+6
∑i=1
I−1i (γ(t))σi(t) (16)
with I−1i being columni of the matrixI
−1 =(
M−1 00 J−1
)
andY(γ(t)) accounts for the
external forces (a restoring forcerCB ×Rtρg∇k, a drag momentumDΩ(Ω)Ω, and a
5

drag forceDν (ν)ν). In the absence of these external forces the equations of motion in(15) represent aleft-invariant affine-connection control systemon the Lie group SE(3),
∇γ ′γ ′ =
(
M−1ϕνJ−1τΩ
)
. (17)
More generally, just as equation (15) on SE(3) is equivalent to equations (1), (2) and(14) onT SE(3), a forced affine-connection control system on a manifoldQ is equiva-lent to an affine control system onTQ with a drift. This equivalence is realized via thegeodesic sprayof an affine-connection and thevertical lift of tangent vectors toQ.
DEFINITION 2.3. Let v∈ TqQ⊂ TQ, then thevertical lift at v is a map vlftv : TqQ→TvTQ. For w∈ TqQ, we define vlftv(w) = d
dt (v+ tw)|t=0. In components, vlftv(w) =(
0w
)
∈ TvTQ.
DEFINITION 2.4. Thegeodesic sprayof ∇ is the vector fieldS, onTQ, that generatesgeodesic flow. Specifically, forv ∈ TqQ, S(v) = d
dt γ′v(t)|t=0 whereγv is the unique
∇-geodesic such thatγv(0) = q andγv′(0) = v.
From Equation (13), in the special case of our Levi-Civita connection, the geodesicspray is given by:
S(b,R,ν,Ω) =
νΩ
−M−1(
Ω×Mν)
−J−1(
Ω×JΩ + ν×Mν)
.
For this presentation ofS(b,R,ν,Ω), the components are expressed relative to the stan-dard left-invariant basis of vector fields onT SE(3) rather than coordinate vector fields.Equations (1) and (2) can be used to recover expressions forb andR.
Now, the affine control system onT SE(3) with its associated drift is as follows.We denote byη = (b1,b2,b3,φ ,θ ,ψ)t the position and orientation of the vehicle withrespect to the earth-fixed reference frame. The coordinatesφ ,θ ,ψ are the Euler anglesfor the body frame. We introduceχ = (η ,ν,Ω), and letχ0 = χ(0) andχT = χ(T) bethe initial and final states for our submerged rigid body. Then our equations of motioncan be written as:
χ(t) = Y0(χ(t))+6
∑i=1
Yi(t)σi(t) (18)
where the driftY0 is given by
Y0 =
RνΘΩ
M−1[Mν ×Ω +Dν(ν)ν]JΩ×Ω +Mν×ν +DΩ(Ω)Ω− rCB ×RtρgV k
(19)
whereΘ is the transformation matrix between the body-fixed angularvelocity vector(Ω1,Ω2,Ω3)
t and the Euler rate vector(φ , θ , ψ)t , see [13].
6

The input vector fields are given byYi = (0,0,I−1i )t , or in other wordsYi = vlft(I−1
i ).In [3, p224] the authors show that trajectories for the affine-connection control systemon Q map bijectively to trajectories for the affine control system onTQ whose initialpoints lie on the zero-section. The bijection maps the trajectory γ : [0,T] → Q to thetrajectoryϒ = γ ′ : [0,T] → TQ.
In local coordinates, the equations of motion for a submerged rigid body are derivedas follows. The coordinates corresponding to translational and rotational velocities inthe body frame areν = (ν1,ν2,ν3)
t andΩ = (Ω1,Ω2,Ω3)t . Equations (1) and (2) can
be written in local coordinates asη =
(
R 00 Θ
)(
νΩ
)
where
R(η) =
cosψ cosθ R12 R13
sinψ cosθ R22 R23
−sinθ cosθ sinφ cosθ cosφ
(20)
and
Θ(η) =
1 sinφ tanθ cosφ tanθ0 cosφ −sinφ0 sinφ
cosθcosφcosθ
(21)
whereR12=−sinψ cosφ +cosψ sinθ sinφ , R13= sinψ sinφ +cosψ cosφ sinθ , R22=cosψ cosφ +sinφ sinθ sinψ andR23 =−cosψ sinφ +sinψ cosφ sinθ . Notice that thetransformation depends on the convention used for the Eulerangles. Our choice reflectsthe fact that the rigid body goes through a singularity for aninclination of± π
2 .In the sequel we denote the diagonal elements of the added mass matrix, the inertia
matrix, and the added inertia matrix respectively byMν1f ,Mν2
f ,Mν3f , Jb1,Jb2,Jb3
andJΩ1f ,JΩ2
f ,JΩ3f , respectively. The restoring forces in local coordinates are:
−rCB ×RtρgV k = −ρgV
yBcosθ cosφ −zBcosθ sinφ−zBsinθ −xBcosθ cosφxBcosθ sinφ +yBsinθ
(22)
whererCB = (xB,yB,zB).
LEMMA 2.5. The equations of motion for a submerged rigid body in a real fluid withexternal forces expressed in coordinates are given by the following affine control sys-
7

tem:
b1 = ν1cosψ cosθ + ν2R12+ ν3R13 (23)
b2 = ν1 sinψ cosθ + ν2R22+ ν3R23 (24)
b3 = −ν1sinθ + ν2cosθ sinφ + ν3cosθ cosφ (25)
φ = Ω1 + Ω2sinφ tanθ + Ω3cosφ tanθ (26)
θ = Ω2cosφ −Ω3sinφ (27)
ψ =sinφcosθ
Ω2 +cosφcosθ
Ω3 (28)
ν1 =1
m+Mν1f
[−(m+Mν3f )ν3Ω2 +(m+Mν2
f )ν2Ω3 +Dν(ν1)+ ϕν1] (29)
ν2 =1
m+Mν2f
[(m+Mν3f )ν3Ω1− (m+Mν1
f )ν1Ω3 +Dν(ν2)+ ϕν2] (30)
ν3 =1
m+Mν3f
[−(m+Mν2f )ν2Ω1 +(m+Mν1
f )ν1Ω2 +Dν(ν3)+ ϕν3] (31)
Ω1 =1
Ib1 +JΩ1f
[(Ib2 − Ib3 +JΩ2f −JΩ3
f )Ω2Ω3 +(Mν2f −Mν3
f )ν2ν3
+DΩ(Ω1)+ ρgV (−yBcosθ cosφ +zBcosθ sinφ)+ τΩ1] (32)
Ω2 =1
Ib2 +JΩ2f
[(Ib3 − Ib1 +JΩ3f −JΩ1
f )Ω1Ω3 +(Mν3f −Mν1
f )ν1ν3
+DΩ(Ω2)+ ρgV (zBsinθ +xBcosθ cosφ)+ τΩ2] (33)
Ω3 =1
Ib3 +JΩ3f
[(Ib1 − Ib2 +JΩ1f −JΩ2
f )Ω1Ω2 +(Mν1f −Mν2
f )ν1ν2
+DΩ(Ω3)+ ρgV (−xBcosθ sinφ −yBsinθ )+ τΩ3] (34)
where Dν(νi) = Di1ν ν3
i +Di2ν νi and DΩ(Ωi) = Di1
ΩΩ3i +Di2
ΩΩi . ϕν = (ϕν1,ϕν2,ϕν3) andτΩ = (τΩ1,τΩ2,τΩ3) represent the control.
As mentioned previously, the control represents the actuation of thursters. A con-sequence is that the components of the control are bounded. We here put a bound onthe 6 DOF control, assuming each component is independentlybounded from the oth-ers. See [4] for a discussion about translating these boundsto the actual control for ourtest-bed vehicle.
DEFINITION 2.6. An admissible control is a measurable bounded function(ϕν ,τΩ) :[0,T] → F ×T where:
F = ϕν ∈ R3|αminνi
≤ ϕνi ≤ αmaxνi
, αminνi
< 0 < αmaxνi
, i = 1,2,3T = τΩ ∈ R3|αmin
Ωi≤ τΩi ≤ αmax
Ωi, αmin
Ωi< 0 < αmax
Ωi, i = 1,2,3 (35)
8

3 Singular Extremals
In this section we study the singular arcs as defined by the Maximum Principle for thetime minimal problem.
3.1 Maximum Principle
Assume that there exists an admissible time-optimal control σ = (ϕν ,τΩ) : [0,T] →F ×T , such that the corresponding trajectoryχ = (η ,ν,Ω) is a solution of equa-tions (23)-(34) and steers the body fromχ0 to χT . For the minimum time problem theMaximum Principle, see [23], implies that there exists an absolutely continuous vectorλ = (λη ,λν ,λΩ) : [0,T] → R12, λ (t) 6= 0 for all t, such that the following conditionshold almost everywhere:
η =∂H∂λη
, ν =∂H∂λν
,Ω =∂H∂λΩ
, λη = −∂H∂η
, λν = −∂H∂ν
, λΩ = −∂H∂Ω
(36)
where the Hamiltonian functionH is given by:
H(χ ,λ ,σ) = λ tη(Rν,ΘΩ)t + λ t
νM−1[Mν ×Ω +Dν(ν)ν + ϕν ]
+λ tΩJ−1[JΩ×Ω +Mν×ν +DΩ(Ω)Ω− rB×RtρgV k+ τΩ] (37)
Furthermore, the maximum condition holds:
H(χ(t),λ (t),σ(t)) = maxσ∈F×T
H(χ(t),λ (t),σ) (38)
The maximum of the Hamiltonian is constant along the solutions of (36) and mustsatisfyH(χ(t),λ (t),σ(t)) = λ0, λ0 ≥ 0. A triple (χ ,λ ,σ) that satisfies the MaximumPrinciple is called an extremal, and the vector functionλ (·) is called the adjoint vector.
The maximum condition (38), along with the control domainF ×T , is equivalentalmost everywhere to (M,J diagonal and positive),i = 1,2,3:
ϕνi (t) = αminνi
if λνi (t) < 0 andϕνi (t) = αmaxνi
if λνi (t) > 0 (39)
τΩi (t) = αminΩi
if λΩi (t) < 0 andτΩi (t) = αmaxΩi
if λΩi (t) > 0 (40)
Clearly, the zeros of the functionsλνi determine the structure of the solutions to theMaximum Principle, and hence of the time-optimal control.
DEFINITION 3.1. We denote theith switching function by:
δi(t) = λ t(t)Yi , (41)
i = 1, . . . ,6.
DEFINITION 3.2. We say that a componentσi of the control is bang-bang on a giveninterval [t1,t2] if its corresponding switching functionδi is nonzero for almost allt ∈[t1,t2]. A bang-bang component of the control only takes values inαmin
ν j,αmax
ν j if
9

σi = ϕν j and inαminΩ j
,αmaxΩ j
if σi = ϕΩ j for almost everyt ∈ [t1,t2], i = 1, · · · ,6. On
the other hand, if there is a nontrivial interval[t1,t2] such that a switching function isidentically zero, the corresponding component of the control is said to be singular on[t1,t2]. A singular component control is said to be strict if the other controls are bang.Assume a given component of the control to be piecewise constant; for example, whenthe component is bang-bang. Then, we say thatts ∈ [t1,t2] is a switching time for thiscomponent if, for each interval of the form]ts−ε,ts+ε[∩[t1,t2], ε > 0, the componentis not constant.
3.2 Switching Functions
LEMMA 3.3. The first derivative of the switching functionδi , i = 1, . . . ,6 is an abso-lutely continuous function. Using Y0, . . . ,Y6 andσ1, . . . ,σ6 from equation(18), the firstand second derivatives ofδi are given by:
δi(t) = λ t(t)[Y0,Yi ](χ(t)) (42)
δi(t) = λ t(t)ad2Y0
Yi(χ(t))+6
∑j=1
λ t(t)[Yj , [Y0,Yi ]](χ(t))σ j(t) (43)
where[ , ] denotes the Lie bracket of vector fields.
Proof. It is a standard fact that the derivative ofδi along an extremal is given byδi(t) =λ t(t)[Y0,Yi ](χ(t))+ ∑6
j=1λ t(t)[Yj ,Yi ](t)σ j(t). The vector fieldsYi are vertical lifts; itfollows that their Lie brackets are zero. Differentiating once more, we obtain (43).
REMARK 3.4. Instead of the Lie brackets, we can use the Poisson brackets.Indeed, ifwe write the Hamiltonian function asH = H0+∑6
i=1Hiσi whereH0 = λ tY0,Hi = λ tYi ,equations (42), (43) become:δi(t)= H0,Hi(χ(t)) andδi(t)= H0,H0,Hi(χ(t))+∑6
j=1H j ,H0,Hi(χ(t))σ j(t).
Another direct consequence of the form of the input vector fieldsYi is the symmetricproperty described in Lemma 3.5. It will play a major role when computing the secondderivative of the switching functions. Notice that this lemma holds with or withoutexternal forces.
LEMMA 3.5. For i, j = 1, · · · ,6, we have
[Yi , [Y0,Yj ]] = [Yj , [Y0,Yi ]] (44)
Proof. It comes from the fact that[Yi , [Y0,Yj ]] is a multiple of ∂ 2Y0∂ χ6+i∂ χ j+6 and that the
partial derivatives commute.
To derive conclusions about the singular arcs for our system, such as their order, weneed to explicitly describe the Lie brackets involved in (42) and (43). LetS=
(
R 00 Θ)
bethe transformation matrix between the coordinates expressed in the inertial frame andthe coordinates expressed in the body-fixed frame and letSi be thei-th column. Webegin by deriving the results for the simplified case of a rigid body moving in the air.
10

For our computations, we introduceU = 1,2,3 andV = 4,5,6. The nextthree propositions are a result of straightforward but heavy computations. We decidedto omit these computations since only the results are important for the rest of the paper.The vectorsei , i ∈ U represent the standard basis forR3.
PROPOSITION3.6. For a rigid body moving in the air, we have that:
[Y0,Yi ]air =
( 1m+M
νif
)Si
∑j 6=i,k∈U \i, j
εiΩk
m+Mν jf
ej
∑j 6=i,k∈U \i, j
εiνk
Ib j +JΩ jf
(1−m+Mνk
f
m+Mνif
)ej
(45)
for i ∈ U whereεi = sgn(k− i) and
[Y0,Yi ]air =
( 1
Ibi−3+J
Ωi−3f
)Si
∑j 6=i,k∈U \i−3, j−3
εi(m+Mνk
f )νk
(m+Mν jf )(Ibi−3 +JΩi−3
f )ej
∑j 6=i,k∈U \i−3, j−3
εiΩk
Ib j +JΩ jf
(1−Ibk +JΩk
f
Ibi−3 +JΩi−3f
)ej
(46)
for i ∈ V whereεi = sgn(k− i +3).
To study the Lie brackets[Yi , [Y0,Yj ]]air, let us introduce a new piece of notation.Without loss of generality we may assumei ≤ j from Lemma 3.5. We define:
[Yi , [Y0,Yj ]]air =
Bi j i, j ∈ U
B j−3i i ∈ U , j ∈ V
Bi−3, j−3 i, j ∈ V
(47)
Then, we get the following Proposition.
PROPOSITION3.7. For a rigid body moving in the air, we have that
Bi j = Bi−3, j−3 =1
Ibk +JΩkf
(1
m+Mν jf
− 1
m+Mνif
)
(
0ek
)
(48)
B j−3i =
1
(m+Mνkf )(Ib j−3 +J
Ω j−3f )
(
ek
0
)
. (49)
where k6= i, j for Bi j , k 6= i −3, j −3 for Bi−3, j−3, and k6= i, j −3 for Bi, j−3.
We now extend the computations to the model in real fluid. Remember here thatwe consider dissipative forces acting on the vehicle. However, notice that the restoringforces do not play any role in the expression of the Lie brackets, yet the drag forceshave a significant impact.
11

PROPOSITION3.8. For a rigid body moving in a real fluid, we have that:
[Y0,Yi ]real = [Y0,Yi ]air +
06−3Di1
ν ν2i +Di2
ν(m+Mν i
f )2 ei
03
(50)
for i ∈ U , and
[Y0,Yi ]real = [Y0,Yi ]air +
06
3D(i−3)1Ω Ω2
i +D(i−3)2Ω
(Ibi−3+J
Ωi−3f )2
ei−3
03
(51)
for i ∈ V . Moreover:
[Yi , [Y0,Yj ]]real = [Yi , [Y0,Yj ]]air +
(
−6Di1ν νi
(m+Mν if )3
)
Yi i f i , j ∈ U
(
6D(i−3)1Ω Ωi−3
(Ibi−3+J
Ωi−3f )3
)
Yi i f i , j ∈ V
0 i f i ∈ U , j ∈ V
REMARK 3.9. More explicitly, for the Lie brackets of order 2 the above propositionsays that:
[Yi , [Y0,Yj ]]real = 0, i = j −3;i ∈ U , j ∈ V (52)
[Yi , [Y0,Yj ]]real = (−6Di1
ν νi
(m+Mν if )3
)Yi , i = j; i, j ∈ U (53)
[Yi , [Y0,Yj ]]real =
(
6D(i−3)1Ω Ωi−3
(Ibi−3 +JΩi−3f )3
)
Yi , i = j; i, j ∈ V (54)
[Yi , [Y0,Yj ]]real =(m+Mν i
f )− (m+Mν jf )
(m+Mν if )(m+Mν j
f )Yk (55)
for i 6= j; i, j ∈ U ;k∈ U \i, j
[Yi , [Y0,Yj ]]real =(Ibi−3 +JΩi−3
f )− (Ib j−3 +JΩ j−3f )
(Ibi−3 +JΩi−3f )(Ib j−3 +J
Ω j−3f )
Yk (56)
for i 6= j; i, j ∈ V ;k∈ V \i, j
[Yi , [Y0,Yj ]]real =1
(m+Mνkf )(Ib j−3 +J
Ω j−3f )
Yk (57)
for i ∈ U ; j ∈ V ;k∈ U \i,( j −3)
An important consequence of the previous computations thatwe will exploit in thispaper is stated in Proposition 3.10.
12

PROPOSITION3.10. For a rigid body moving in the air, we have that:
[Yi , [Y0,Yi ]]air(χ) = 0, i = 1, . . . ,6. (58)
In a real fluid, the previous Lie bracket is not zero but satisfies:
[Yi , [Y0,Yi ]]real(χ) ∈ SpanYi, i = 1, . . . ,6. (59)
Proof. This result is a direct consequence of our computations on Lie brackets. Indeed,equation (58) comes from the fact that (48) implies thatBii andBi−3,i−3 equal zero. Thefactors multiplyingYi in (59) are given by (53) and (54).
3.3 Order of the Singular Arcs
We now demonstrate that Proposition 3.10 can be stated in terms of the order of singularextremals.
DEFINITION 3.11. Along a strictσi -singular arc, letq be such thatd2q
dt2q δi is the lowestorder derivative in whichσi appears explicitly with a nonzero coefficient. We defineqas the order of the singular controlσi .
This definition assumes the well known result that a singularcontrolσi first appearsexplicitly in an even order derivative ofδi , see [22].
PROPOSITION3.12. Let χ be an extremal that is strictly singular for the componentσi of the control. Then, for a submerged rigid body the order of the singular control isat least 2.
Proof. Let χ be a strictσi-singular extremal. By definition, the functionδi is identi-cally zero along the extremal. The singular controlσi is obtained from equation (43)providing that the termλ t [Yi , [Y0,Yi ]](χ) is non zero. However, from Proposition 3.10,this is zero for movement in air and is a multiple ofλ tYi for motion in a real fluid. Butsince along aσi-singular extremal we haveδi = λ tYi = 0, thenλ t [Yi , [Y0,Yi ]](χ) is zeroin a real fluid as well. This means that we must compute at leastthe fourth derivativeof the switching function to obtain the singular control as afeedback.
REMARK 3.13. For a rigid body moving in air, the termλ t [Yi , [Y0,Yi ]](χ) is iden-tically zero everywhere. We then say that the order is intrinsic. For a real fluid,λ t [Yi , [Y0,Yi ]](χ) is zero only along the singular arc.
To determine the exact order of strict singular controls, weneed to compute thefourth derivative of the switching functions. The coefficient of the singular controlσi
in δ (4)i is represented by the following Lie brackets:λ t [Yi , [Y0, [Y0, [Y0,Yi ]]]]. The com-
putations in 3-dimensions are very complicated due to the complexity of the equations.Based on previous results in [7] on a simplified 2-dimensional model, we state thefollowing conjecture.
CONJECTURE3.14. For a 3-dimensional rigid body moving in a real fluid, the singulararcs are of the following orders:
13

1. m+Mνif = m+M
ν jf . Theϕνi -singular arcs are of infinite order. TheτΩi -singular
arcs are of intrinsic order 2.
2. m+Mνif 6= m+M
ν jf . Theϕνi -singular andτΩi -singular arcs are of order 2.
REMARK 3.15. The order of the singular arcs in the translational velocities is relatedto the symmetry of the rigid body.
3.4 Chattering Arcs
It has been established in [26] that there is a close relationship between the existenceof chattering arcs and singular extremals of order 2. Such arcs are very interestingfrom a theoretical point of view, however these arcs are impossible to implement inpractice. Let us consider a simplified situation to carry outthe computations such asin [7]. We will assume that the vehicle moves in thexz-plane and is submerged in air.The equations of motion, in local coordinates, are given by (60)-(65).
b1 = ν1cosθ + ν3sinθ (60)
b3 = ν3cosθ −ν1sinθ (61)
θ = Ω (62)
ν1 = −ν3Ωm+Mν3
f
m+Mν1f
+ϕν1
m+Mν1f
(63)
ν3 = ν1Ωm+Mν1
f
m+Mν3f
+ϕν3
m+Mν3f
(64)
Ω = ν1ν3Mν3
f −Mν1f
I+
τΩI
(65)
Moreover, we assumeMν1f = Mν3
f , hence we writem= m+Mν1f andI = Ib +JΩ2
f .
REMARK 3.16. Kelley’s strict necessary condition for the singular control τΩ to be
optimal holds. Indeed, it is an easy computation to show thatλ (4)Ω = A4 + τΩB4 where
B4 = −λν3ϕν3 + λν1ϕν1
mI2. Since along a strictτΩ-singular arc the controlsϕν1 andϕν3
are bang,B4 = −|λν3|+ |λν1|mI2
is strictly negative:B4 < 0.
Analysis of theτΩ-singular arcs follows the procedure described in [26]. First, weput the Hamiltonian system (36) into a semi-canonical form.We assume thatϕν1 andϕν3 are bang. Since aτΩ-singular arc is of intrinsic order two, the four first coordinatesof the new system(κ ,ξ ) areκ =(κ1,κ2,κ3,κ4) whereκ1 = λΩ/I ,κ2 = λΩ/I =(−λθ +
λν1ν3−λν3ν1)/I ,κ3 = λΩ/I = (−λν1ϕν1 +λν1ϕν3)/(mI),κ4 = λ (3)Ω /I = ((λb1 cosθ −
λb3 sinθ + Ωλν3)ϕν3 − (λb1 sinθ + λb3 cosθ −λν1Ω)ϕν1)/(mI). To completely definea new coordinate system we need to findξ such that the JacobianD(κ ,ξ )/D(χ ,λ ) is
14

of full rank. We suggest
ξ1 = b1 , ξ5 = λb1 cosθ −λb3 sinθξ2 = b3 , ξ6 = λb1 sinθ + λb3 cosθξ3 = θ , ξ7 = λθξ4 = ν1 , ξ8 = λν1
(66)
The correspondingD(κ ,ξ )/D(χ ,λ ) is then of full rank and the canonical Hamiltoniansystem is
κ1 = κ2, κ2 = κ3, κ3 = κ4
κ4 = Ω(2ξ5 +2ξ6+ Ωλν3 −Ωξ8)/(mI)− (ξ8ϕν1 + λϕ3ϕν3)τΩ/(mI2)ξ1 = ξ4 cosξ3 + ν3sinξ3, ξ2 = ν3 cosξ3− ξ4sinξ8, ξ3 = Ωξ4 = −Ων3 + ϕν1/m, ξ5 = −Ωξ6, ξ6 = Ωξ5
ξ7 = ξ4ξ6−ν3ξ5, ξ8 = −ξ5−λν3Ω
(67)
where
λν3 = (ξ8ϕν3 −mIκ3)/ϕν1
ν3 = (ξ7 + λν3ξ4− Iκ2)/ξ8
Ω = (mIκ4− ξ5ϕν3 + ξ6ϕν1)/(λν3ϕν3 + ξ8ϕν1)(68)
Since we were able to reduce our system to a semi-canonical form, along with Re-mark 3.16, Kelley’s condition holds; it is now possible to apply the results from [26].Here, the authors describe the behavior of all extremals in the vicinity of the singularmanifoldS= (χ ,λ )|κi = 0, i = 1, · · · ,4. In particular, we can conclude that for eachpoint (χ0,λ0) in S there exists a 2-dimensional integral manifold of the Hamiltoniansystem such that the behavior of the solutions inside this manifold is similar to that ofthe chattering arcs in the Fuller problem (also we have the existence of untwisted chat-tering arcs). To be more specific, there is a one-parameter family of solutions of system(67) which reach(χ0,λ0) in a finite time, however there are infinitely many switchingtimes for theτΩ control and the switching times follow a geometric progression. Itis important to notice that this result does not imply the optimality of such trajecto-ries nor does it imply (assumingϕν1,ϕν3 are constants) that every junction between aτΩ-singular and aτΩ bang-bang trajectory includes chattering in the control. In orderfor such a junction to have chattering, the control must be discontinuous, [21]. Thisis realized at the junction where the angular velocity vanishes (i.e. Ω = 0). In [11]the reader can see an example of a chattering junction computed in the non-symmetriccase.
3.5 Time Optimal Trajectories
In this subsection, we display an example of a time optimal trajectory for a submergedrigid body immerged in a real fluid containing singular arcs.
The initial configuration is set to the origin and we wish to reach a final configu-ration ηT = (6,4,1,0,0,0), with both configurations being at rest. The experimentalvalues of the hydrodynamic coefficients and the bounds on thecontrol that we assume
15

0 10 20−10
0
10
γ ν 1
0 10 20−10
0
10
γ ν 2
0 10 20−20
0
20
40
γ ν 3
t (s)
0 10 20−5
0
5
γ Ω1
0 10 20−5
0
5
γ Ω2
0 10 20−1
0
1
γ Ω3
t (s)
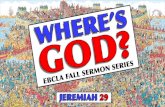
Figure 1:Time Optimal thrust strategy ending atηT = (6,4,1,0,0,0).
for these simulations can be found in [6]. Figure 1 shows the time optimal strategywith a direct method being used for the numerical computations. The time for thistrajectory is≈ 25.85s. The structure is mostly bang-bang, except for theτΩ3 controlwhich contains singular arcs. These singular arcs depend onour choice of initial andfinal configurations. In this case, orientation is the key to optimality; first orient, thenmove. We orient the vehicle such that we can use the maximum available translationalthrust to realize the motion, and the vehicle needs to maintain this orientation over theentire trajectory. Singular arcs do not appear inτΩ1 andτΩ2 because their full power isneeded to offset the righting moments. The translational controlsϕν1,ν2,ν3 are used totheir full extent, as one would expect for a time optimal translational displacement.
4 Decoupling Vector Fields
In terms of affine differential geometry, Proposition 3.10 has important consequences.Indeed, there is a relation between our result and the existence of decoupling vectorfields. This is what we establish in this section.
Through this section we make the following additional assumptions. We considera rigid body moving in air. Moreover, we assume the center of gravity CG coincidewith the center of buoyancyCB. Since we already assumed the vehicle to be neutrallybuoyant it implies that there are no restoring forces or moments acting on the vehicle.To ease the notation in this section, we will usemi = m+Mνi
f and j i = Ibi +JΩif . As we
will see, our results depend on the symmetries of the rigid body, hence we introducesome terminology.
DEFINITION 4.1. We call our systemkinetically uniqueif all the eigenvalues in the
16

kinetic energy metricG are distinct.
The above definition express that for a kinetically unique system the added mass(m+ Mνi
f ) and added inertia (Ibi + JΩif ) coefficients are all distinct. Since the added
massWe refer toI−1
i , i ∈ U as the translational control vector fields andI−1j , j ∈ V the
rotational control vector fields. Finally, to ease notation, we will usemi = m+Mνif and
j i = Ibi +JΩif .
In the sequel we denote byI−1 the set of input vector fields to our system:I−1 =I
−11 , . . . ,I−1
6 . Hence, we are considering under-actuated systems
∇γ ′(t)γ ′(t) =k
∑i=1
σi(t)I−1i (γ(t)), (69)
with k< 6,I−11 , . . . , I−1
k an independent subset ofI−1, andσ1, . . . ,σk the correspond-ing controls; see (16). We defineI −1
k = I−11 , . . . , I−1
k andI −1 = SpanI −1k . We
note here that under our assumptions,I−1 is diagonal, and thus eachI−1i , i = 1, ...,6,
is a single degree of freedom input to the system. We first givea classification of thedecoupling vector fields with respect to the number degrees of freedom we can input tothe system; a one-input system can be controlled in only one degree of freedom. Moredetails on this classification can be found in [12].
In this section, unless stated otherwise we do not impose anybounds on the control.Let us first introduce some terminology. Suppose we have a general affine-connectioncontrol system given by
∇γ ′(t)γ ′(t) =k
∑a=1
ua(t)Za(γ(t)), (70)
whereu1(t), . . . ,uk(t) are measurable controls andZ1, . . . ,Zk is a set of locally de-fined independent vector-fields on the configuration spaceQ whose images lie in arank-k smooth distributionZ ⊂ TQ. In [3] the authors introduce the notion of kine-matic reductions. Decoupling vector fields are kinematic reductions of rank one. Moreprecisely, we have the following definition.
DEFINITION 4.2. A decoupling vector fieldfor an affine-connection control system isa vector fieldV onQ having the property that every reparametrized integral curve forVis a trajectory for the affine-connection control system. More precisely, letγ : [0,S] →Q be a solution forγ ′(s) = V(γ(s)) and lets : [0,T] → [0,S] satisfy s(0) = s′(0) =s′(T) = 0, s(T) = S, s′(t) > 0 for t ∈ (0,T), and(γ s)′ : [0,T] → TQ is absolutelycontinuous. Thenγ s : [0,T] → Q is a trajectory for the affine-connection controlsystem. Additionally, an integral curve ofV is called akinematic motionfor the affine-connection control system.
A necessary and sufficient condition forV to be a decoupling vector field for theaffine-connection control system (70) is that bothV and∇VV are sections ofZ [3, p.426]. Notice that ifZ = TQ (i.e. (70) is fully-actuated) then every vector field is a
17

decoupling vector field, and ifZ has rankk = 1 (i.e. (70) is single-input) thenV is adecoupling vector field if and only if bothV and∇VV are multiples ofZ1.
In the under-actuated setting, decoupling vector fields arefound by solving a sys-tem of homogeneous quadratic polynomials in several variables. Given a vector fieldV, we must have thatV = ∑k
a=1haZa sinceV ∈ SpanZ1, . . . ,Zk. Now, since∇VV ∈SpanZ1, . . . ,Zk we want
∇VV = ∇∑haZa ∑hbZb ≡ 0 (modZ ). (71)
Starting with the middle of the above equation, we get that
∇∑haZa ∑hbZb = ∑ha∇Za ∑hbZb = ∑∑ha∇Za(hbZb)
= ∑∑ha[Za(hb)Zb +hb∇ZaZb]
≡ ∑∑hahb∇ZaZb (mod Z )
≡ 12 ∑∑hahb(∇ZaZb + ∇ZbZa) (mod Z ).
(72)
Thus, we are concerned with calculating∇ZaZb for a,b∈ 1, ...,k to find the coeffi-cientsh1, . . . ,hk such thatV is decoupling.
In the case of a rigid body submerged in a real fluid, the control system is a forcedaffine-connection control system and the existing theory does not apply. First, wewill consider a rigid body moving in an ideal fluid, i.e. we neglect the drag forcesand momentum. Moreover, in the rest of this section we assumethat the center ofbuoyancy and the center of gravity of our submerged rigid body coincide; there isno restoring moment. Under these assumptions, the equations of motion developedin Section 2 can be represented as afully-actuatedaffine-connection control system∇γ ′(t)γ ′(t) = ∑6
i=1 σi(t)I−1i (γ(t)). In this case there are no quadratic polynomials to
solve and every left-invariant vector field is a decoupling vector field.However, the situation is not as straightforward in the under-actuated scenario;
practically speaking, the case of an actuator failure. In this situation, the body maybe unable to apply a force or torque in one or more of the six DOF, limiting the vehi-cle’s controllability. This is an interesting case becauseit is likely that an underwatervehicle loses actuator power for one reason or another but still needs to move. Forexample, we would like the vehicle to be able to return home ina distressed situa-tion. Decoupling vector fields give possible trajectories for the return home which thevehicle is able to realize in an under-actuated condition. In [2], the authors consideran under-actuated situation that differs from the ones we are considering here (theyassume three body-fixed control forces that are applied at a point different from thecenter of gravity).
Let us first discuss the degenerate situation of one single DOF input vector field,k = 1. This can also be viewed as a loss of 5 DOF situation. Clearlythe only possiblemotion for the body is a motion along or about a single principle axis of inertia.
DEFINITION 4.3. The vector fieldsI−1i , i ∈ 1, · · · ,6, are called thepure motions.
Their integral curves correspond to a motion along or about asingle principle axis ofinertia; that motion is either purely translationalor purely rotational.
18

Since in our case∇Ii−1Ii
−1 = 0, the decoupling vector fields of the single input
system∇γ ′(t)γ ′(t)= Ii−1(γ(t))σi(t) are multiples of the input vector fieldIi
−1. Genericsingle-input affine-connection control systems have no decoupling vector fields sincea generic vector field will not satisfy the condition that∇ZZ ∈ SpanZ. However,if a vector fieldZ does satisfy∇ZZ ∈ SpanZ, then via a reparameterization we get∇ZZ = 0. Geometrically, we refer toZ asauto-parallel; the integral curves ofZ aregeodesics for the connection∇.
Suppose now that we use two input vector fields;k = 2. A calculation of the termsG(∇
I−1i
I−1j ,I−1
k ) with I−1i ,I−1
j ,I−1k ∈ I−1 shows the following (see also Equation (72)).
Fix i, j ∈ 1, ...,6 wherei < j. LetV = hi I−1i +h j I
−1j andεi jk be the standard permu-
tation symbol. We have:
∇VV ≡
hih j
(
(−1)k 1jk(mi −mj)I
−1k+3
)
if i, j ∈ U andk∈ U \i, jhih j
(
(−1)k+1 1jk( j j − j i)I−1
k
)
if i, j ∈ V andk∈ V \i, jhih j
(
εi jk( mimk
)I−1k
)
if i ∈ U and j ∈ V andk∈ U \i, j −30 j = i +3
(mod I−1i ,I−1
j ) (73)
We can deduce that given a kinetically unique two-input systemI−12 = I
−11 , I−1
2 inwhich both inputs do not act upon the same principle axis of inertia, a vector fieldVis decoupling if and only ifV ∈ I −1 and has all but one of its components equal tozero. In particular, it has the formV = h1I
−11 orV = h2I
−12 . These are pure motions. If
both inputs act on the same principle axis of inertia (i ∈ U , I−12 = I
−1i ,I−1
3+i), everyvector fieldV ∈ I −1 is decoupling since∇VV ∈ I −1. If we loosen the kineticallyunique assumption and letmi = mj for i, j ∈ U or jk = j l k, l ∈ V , then every vectorfield V ∈ I −1 is decoupling.
After introducing some additional terminology, we will summarize the results forthe other input systems in a theorem.
DEFINITION 4.4. A vector fieldV is called anaxial motionif it is of the form V =hi I
−1i +hi+3I
−1i+3 wherei ∈ U .
We use the term axial motions since these are a translation and rotation acting on thesame principle axis of inertia. These can be seen as an extension of the pure motions.
DEFINITION 4.5. A vector fieldV is called acoordinate motionif it is of the formV = hi I
−1i +h j I
−1j +hkI
−1k wherei = 1 or 4, j = 2 or 5 andk = 3 or 6.
We choose the term coordinate motion since all three axes of the coordinate framerepresented.
THEOREM 4.6. Under our assumptions on a submerged rigid body in an ideal fluidwe have the following characterization for the decoupling vector fields in terms of thenumber of degrees of freedom we can input to the system.
19

Case 1: Single-input system,I −11 = I
−11 . The decoupling vector fields are multiples
of I−11 ; these are pure motions.
Case 2: Two-input system,I −12 = I
−11 , I−1
2 in which both inputs do not act upon thesame principle axis of inertia. Then, for a kinetically unique system, a vectorfield V ∈ I −1 is decoupling if and only if V has all but one of its componentsequal to zero. In particular, it has the form V= h1 I
−11 or V = h2 I
−12 ; these are
pure motions. If the input vector fields act on the same principal axis of inertia,then every vector field inI is decoupling.
Case 3: Three-input system.
1. Three Translational Inputs:I −13 = I
−11 ,I−1
2 ,I−13 . For a kinetically unique
system, a vector field V∈I −1 is decoupling if and only if V has all but oneof its components equal to zero. In particular, it has the form V = hi I
−1i for
i ∈ U ; these are the pure translational motions. Assuming exactly two ofthe mi ’s are equal, we get the axial motions as additional decoupling vectorfields: V= hi I
−1i +h j I
−1j , where mi = mj and mi 6= mk. If mi = mj = mk,
then every vector field V∈ I −1 is decoupling since∇VV ∈ I −1.
2. Three Rotational Inputs:I −13 = I
−14 ,I−1
5 ,I−16 . In this case∇VV ∈ I −1
for all V ∈ I −1, thus each vector field V∈ I −1 is decoupling.
3. Mixed Translational and Rotational Inputs. Suppose we have a kineticallyunique three input system such that the inputs are not all translational orall rotational but represents motions along three distinctaxis. Then, everyvector field V∈ I −1 is decoupling. If the three input system is such that itrepresents an axial motion plus another input vector field, the decouplingvector fields are the axial motions, V= hi I
−1i + hi+3 I
−1i+3 for i ∈ U , and
the pure motions, V= h j I−1j where j 6= i and j 6= i +3. The remarks about
the symmetries in the case of three translational input are valid in this casealso.
Case 4: Four input system.
1. Three Translation, One Rotation:I −14 = I
−11 ,I−1
2 ,I−13 ,I−1
k where k∈V . For a kinetically unique system the decoupling vector fields are theaxial motionsV= hk−3 I
−1k−3+hk I
−1k or the coordinate motionsV= hi I
−1i +
h j I−1j + hk I
−1k with i, j ∈ U , i, j 6= k− 3. If mk−3 = mi for i ∈ U and
i 6= k−3, then V= hi I−1i + hk−3I
−1k−3 + hkI
−1k is also a decoupling vector
field. If m1 = m2 = m3, then every vector field V∈ I −1 is a decouplingvector field.
2. Three Rotations, One Translation:I −14 = I
−1i ,I−1
4 ,I−15 ,I−1
6 where i∈U . Then the decoupling vector fields are the axial motions V= hi I
−1i +
hi+3I−1i+3 or the coordinate motions V= h4 I
−14 +h5I
−15 +h6I
−16 .
3. Two Translations, Two Rotations. For a kinetically unique system, if twoprinciple axes are repeated:I −1
4 = I−1i ,I−1
j ,I−1i+3,I
−1j+3 where i, j ∈ U ,
20

then the decoupling vector fields are either the pure motionsV = ha I−1a
for a∈ i, j, i +3, j +3 or the axial motions V= ha I−1a +ha+3I
−1a+3 where
a = 1 or a = j. If mi = mj , then additional decoupling vector fields forthe system are the axial motions plus a multiple of the other translationalinput vector field: V= hi I
−1i +h j I
−1j +hkI
−1k where k= i +3 or k = j +3.
And, if ji = j j , then additional decoupling vector fields for the system areofthe form V= hi+3 I
−1i+3 +h j+3I
−1j+3. For a kinetically unique system, if one
principle axis is repeated:I −14 = I
−1i ,I−1
j ,I−1i+3,I
−1k+3 where i, j,k ∈ U ,
then the decoupling vector fields are the axial motionsV= hi I−1i +hi+3I
−1i+3
or the coordinate motions V= hi I−1i + h j I
−1j + hk+3I
−1k+3. If j i = jk then
h j or hi+3 must be zero, and additional decoupling vector fields are theaxial motions plus a multiple of the other rotational input vector field: V=hi I
−1i +hi+3I
−1i+3 +hk+3I
−1k+3.
Case 5: Five input system.
1. Three Translations, Two Rotations:I−15 = I
−11 ,I−1
2 ,I−13 ,I−1
i ,I−1j where
i, j ∈ V , and let k∈ V such that k6= i or j. For a kinetically unique systemthe decoupling vector fields are:
(a) The axial motions plus a multiple of a translational input V = ha I−1a +
ha+3I−1a+3 +hk−3I
−1k−3 where a∈ U − (k−3).
(b) The coordinate motions V= haI−1a + hbI
−1b + hk−3 I
−1k−3 where a,b ∈
I−15 − (k−3).
(c) The motions defined by V= hk−3 I−1k−3 +hbI
−1b where b∈ I
−15 − (k−
3).(d) The pure motion V= hk−3 I
−1k−3
Assuming that mi−3 = mj−3, additional decoupling vector fields are givenby V = ha I−1
a + hk I−1k + hi I
−1i + h j I
−1j where a= i −3 or a = j −3 and
k ∈ U −i −3, j −3. Assuming that ji−3 = j j−3, additional decouplingvector fields are given by V= h1 I
−11 +h2I
−12 +h3I
−13 +haI−1
a where a= ior a = j.
2. Two Translations, Three Rotations:I−15 = I
−1i ,I−1
j ,I−14 ,I−1
5 ,I−16 where
i, j ∈U , and let k∈U such that k6= i or j. For a kinetically unique systemthe decoupling vector fields are:
(a) The axial motions plus a multiple of a rotational input V= ha I−1a +
ha+3I−1a+3 +hk+3I
−1k+3 where a∈ V − (k+3).
(b) The coordinate motions V= haI−1a + hbI
−1b + hk+3 I
−1k+3 where a,b ∈
I−15 − (k+3).
(c) The motions defined by V= hk+3 I−1k+3 +hbI
−1b where b∈ I
−15 − (k+
3).(d) The pure motion V= hk+3 I
−1k+3
Loosening the kinetic uniqueness assumption does not provide any addi-tional decoupling vector fields in this case.
21

Case 6: Six input system. Every vector field is decoupling.
The major application of computing vector fields is the design of trajectories forour system. This is addressed in the following section.
4.1 Motion Planning
Our ultimate goal is to use the aforementioned theory to design trajectories for ourmechanical system. Based on Theorem 4.6 we give partial answers to the motionplanning problem for the under-actuated scenarios considered in the previous section.
Notice first that if the system is fully actuated, the motion planning problem ofconnecting any two configurations at rest is trivial. The simple solution is the concate-nation of pure motions. At the other extreme, with only one input vector field the rigidbody is restricted to movement in only one degree of freedom.An interesting questionis the minimal number of inputs which we need in order to solvethe motion planningproblem using exclusively decoupling vector fields. Since we consider rank-one kine-matic reductions in this paper, we will follow [2] for the definitions and terminology.
DEFINITION 4.7. A submerged rigid body is said to bekinematically controllableifevery point in the configuration spaceSE(3) is reachable via a sequence of kinematicmotions.
We are interested in motions such that the initial and final configurations are atrest. As mentioned before, we can reparameterize each motion to satisfy boundaryconstraints on the controls, and to begin and end at rest. Hence, in what follows, weassume that each kinematic motion starts and ends at rest. The main objective of thissection is to determine how many input vector fields, each controlling one degree offreedom, are needed to provide enough decoupling vector fields for kinematic control-lability. We begin with the following obvious lemma.
LEMMA 4.8. If a vehicle is kinematically controllable, it cannot be controlled by onlytranslational motions or only rotational motions.
COROLLARY 4.9. A submerged rigid body is not kinematically controllable ifthere isonly a single input control vector field:I−1
1 . The same is true if there are only two inputcontrol vector fieldsI −1
2 = I−1i ,I−1
j with i, j ∈ U or i, j ∈ V .
Proof. The first statement above follows from Lemma 4.8 since with only one inputvector field, you would have only translational or rotational motion. For the secondstatement, using Lemma 4.8 we need only consider the combinations of one transla-tional motion and one rotational motion as input vector fields. Upon examination, it isobvious that two input control vector fields restricts the motion of the rigid body to a2-D plane.
The following remark will be useful for our next results.
REMARK 4.10. Given any two translational control vector fieldsI−1i ,I−1
j , i, j ∈ U ,
their Lie bracket vanishes:[I−1i ,I−1
j ] = 0. Given two distinct rotational control vector
fieldsI−1i ,I−1
j , i, j ∈ V , their Lie bracket produces the third rotational control vector
field I−1k , k∈ V ,k 6= i, j.
22

THEOREM 4.11. Assume that our system is kinetically unique. If the set of decouplingvector fields contain only one translational control vectorfield and one rotational con-trol vector field, the kinematic motions of the rigid body arerestricted to a plane inR3. Thus, a submerged rigid body with only two control vector fieldsI
−1i ,I−1
j is notkinematically controllable.
Proof. If i, j ∈ U or i, j ∈ V then we are done by Lemma 4.8. Thus, suppose the twoinputs areI
−1i and I
−1j where i ∈ U and j ∈ V . Now considerL = [I−1
i ,I−1j ]. For
j = i +3, L = 0 since both inputs act on the same axis. Ifj 6= i +3, thenL = I−1k where
k ∈ U andi 6= k 6= ( j −3). Thus, the movement for a two input system is defined byM = spanI
−1i ,I−1
j ,I−1k wherei,k ∈ U , j ∈ V and i 6= k 6= ( j −3). This defines a
plane inR3.
THEOREM 4.12. Assume that our system is kinetically unique. If the set of decouplingvector fields contains at least one translational control vector field and two distinctrotational control vector fields, then the sugmerged rigid body is kinematically control-lable.
Proof. Assume that the decoupling vector fields for our system contain the vector fieldsI−1i ,I−1
j ,I−1k wherei ∈ U , j,k ∈ V and i < j < k. An easy computation shows that
I−1i ,I−1
j ,I−1k , [I−1
i ,I−1k ], [I−1
j ,I−1k ], [[I−1
i ,I−1k ], [I−1
j ,I−1k ]] are six linearly independent
vectors which spanR6. Thus, there exists a path between any two zero velocity con-figurations through the concatenation of integral curves ofdecoupling vector fields forwhich each segment is reparameterized to start and end at zero velocity.
REMARK 4.13. A special case of the previous theorem are the coordinate motionsV = hiI
−1i +h jI
−1j +hkI
−1k , wherei ∈ U and j,k∈ V .
We will now relate Theorem 4.6 to Theorem 4.12 by discussing the controllabil-ity of each case. Obviously the following cases are kinematically controllable: cases4.2, 4.3, 5.1, 5.2 and 6 since their kinematic motions contain at least one translationalcontrol vector field and two disctinct rotational control vector fields. By Lemma 4.8we know that cases 1, 3.1 and 3.2 are not kinematically controllable since their inputcontrol vector fields are either purely translational or purely rotational. Case 2 wasdiscussed in Corollary 4.9 and Theorem 4.11 and are not kinematically controllable.
Now, we consider case 3.3. First notice that if the kinematicmotions are generatedby two translations and one rotation then it is not kinematically controllable. Indeed,assume that the set of decoupling vector fields is generated by I
−1i ,I−1
j ,I−1k where
i, j ∈ U , k ∈ V . Assume first thati, j andk are distinct and not congruent mod 3.Then, [I−1
i ,I−1j ] = 0, [I−1
i ,I−1k ] = I
−1j , [I−1
j ,I−1k ] = I
−1i and [I−1
k ,I−1k ] = 0. Thus we
get that the movement is defined byM = spanI−1i ,I−1
j ,I−1k , and the vehicle clearly
can not reachη f inal = (0,0,0,φ0,θ0,ψ0) from the origin. Assume now thati 6= j andk = i + 3. Then[I−1
i ,I−1k ] = 0, [I−1
i ,I−1j ] = 0 and[I−1
j ,I−1k ] = I
−1κ whereκ ∈ U and
i 6= κ 6= j. Since the bracket withI−1κ with I
−1i or I
−1j is zero by Remark 4.10, the only
combination left is[I−1κ ,I−1
k ] = I−1i . Thus we get that the movement is defined by the
kinematic motions associated toM = spanI−1i ,I−1
j ,I−1κ ,I−1
k . Here again, the vehicle
23

can not reachη f inal = (0,0,0,φ0,θ0,ψ0) from the origin. We can conclude that in case3.3 the rigid body is kinematically controlable if and only if there is at least one trans-lational control vector field and two distinct rotational control vector fields. Similarcomputations to those above will show that case 4.1 is not kinematically controllablebecause there is only one rotational control vector field. The above discussion impliesthe sufficient condition for Theorem 4.12.
Practically, this analysis is important to real AUV’s. Suppose you have a fully-actuated submersible which controls heave, roll and pitch with one set thrusters, V.While surge, sway, and yaw are controlled with another set ofthrusters, H. Supposeyou lost control of one set of these thrusters. With the aboveanalysis we can see thatlosing V would limit the motion of the vehicle to a plane. However, losing the H setwould not affect the controllability of the vehicle and it would remain kinematicallycontrollable. Thus, in the design process of the vehicle, wecould save money byrequiring that robustness need only be implemented onto half the system; the V setof thrusters. Also, for energy conservation, it may be better to use only one set ofthrusters to save battery life. This knowledge can save timeand money for the designerand end-user alike.
Here we demonstrate a practical application to summarize the results of this section.Suppose we have the above mentioned vehicle and we are only allowed to use theV set of thrusters. Suppose that we want to start at the originand end atη f inal =(a,b,c,0,0,90) wherea,b,c∈ R. Note that we do not impose a finalφ or θ ; sincewe have direct control on these, upon reachingη f inal we can just apply control directlyto φ andθ to reach(a,b,c,φ0,θ0,90). We also assume that positiveb values are inthe direction of gravity. The basic idea to realize this displacement is use the pitchand roll controls to point the bottom of the vehicle in the direction ofη f inal and thenuse pure heave for the translational displacement. Upon reaching(a,b,c,φ ,θ ,ψ) wecan do pitch and roll movements to realizeη f inal. For this example, the vehicle needs
to pitchtan−1(bc) and rolltan−1(a
c) then translate√
c2 +√
a2 +b2 units using pureheave, and then undo the roll and pitch. The vehicle is now at(a,b,c,0,0,0). Toreachη f inal apply a 90 pitch followed by a 90 roll followed by a−90 pitch. Thisconcatenation results in a 90 yaw, and the motion is realized. It should be clear thatany other rotational configuration is possible as well.
5 Decoupling Vector Fields and Time Optimality
We are now ready to describe the relationship between the existence of decouplingvector fields and Proposition 3.10. For an affine connection control system definedon a configuration spaceQ, it is easy to verify that[vlft(X), [S,vlft(X)]] = vlft(2∇XX),whereX is any vector field defined onTQandSis the geodesic spray of the connection.Applying this equation to:
∇γ ′γ ′(t) =6
∑i=1
σi(t)Ii−1(γ(t)), (74)
24

we have that[vlft(I−1i ), [S,vlft(I−1
i )]] = vlft(2∇I−1i
I−1i ) which can be written using our
notations as:[Yi , [Y0,Yi ]] = vlft(2∇
I−1i
I−1i ). (75)
It is now obvious that Proposition 3.10 simply states that vlft(2∇I−1i
I−1i ) = 0 which is a
sufficient condition forI−1i to be decoupling for the system (69) as long asI
−1i ∈ I
−1k .
Now we will see how different the scenario is when considering external forcessuch as when the rigid body is submerged in a real fluid. Equation (16) models suchsystem. The notions of kinematic reduction and hence of decoupling vector fields havenot yet been extended to forced affine-connection control systems.
As a first step, we analyze the pure motions. Assume first that the center of gravityand center of buoyancy are coincident.We can still produce apure translation or a purerotation using a single DOF input. Assuming bounded controlinputs, external forcessuch as drag restrict the vehicle to a maximal velocity in theprescribed direction ofmotion. Let us consider a body-pure surge in the positive direction as an example. Formotion in a real fluid, Equation (63) is written as:
ν1 =1
m+Mν1f
(Dν(ν1)+ ϕν1) (76)
Assuming that we start at restν1(0) = 0, the solution to equation (76) is given by
ν1(t) =ϕν1
−Dν (ν1)tanh(t
√
−Dν (ν1)ϕν1
m). Since tanh(t√
−Dν (ν1)ϕν1
m) → 1 whent → ∞, if we
impose 0≤ ϕν1 ≤ αmaxν1
, the vehicle can only realize a maximum velocity ofαmax
ν1Dν (ν1)
m/s.The backward surge motion is symmetric, and the other pure translations and rotationsin the body fixed-frame are similar. Note that in this case, the reparametrizations ofthe integral curves ofγ(t) = I
−1i (t)σi(t) are solutions to the forced affine connection
control system∇γ ′γ ′(t) = Y(γ(t))+ ∑ki=1 σi(t)I
−1i (γ(t)) as long asI−1
i ∈ I−1k . With
bounded controls and hence a maximal velocity constraint, it is clear that not everyreparameterization is a solution to the forced affine-connection control system. This issimply the fact that with a maximal velocity of V m/s, the vehicle can not travel a given(Euclidean) distance of D m, in less than T=D/V seconds. However, since the initialand final states of the trajectory are at rest, we can always reparameterize a trajectory toaccommodate the bound constraints on the controls. Here we do make the assumptionthat the bounds on the controls are such that the vehicle can move through the fluid.
If the rigid body is an underwater vehicle, it is not desirable to haveCG = CB. Thisis a neutral equilibrium, and hence very sensitive to any external forces. Practically,we imposeCG 6= CB in order to create a righting arm, and thus situating the vehiclein a stable equilibrium. In this situation, the vehicle willrestore pitch and roll anglesto zero if no control is applied. Thus, we may not be able to realize a body-puremotion with a single degree of freedom input control vector field. As an example, letus consider a body-pure surge while maintaining a pitch angle of −45; a diagonaldive. AssumingCG = CB, we could first set the orientation, and then use a singlecontrol input to realize the motion. However, once we assumethatCG 6= CB, we haveto compensate for the induced righting moment by applying pitch control during theentire surge to maintain the desired orientation. In general, we need to apply control to
25

the pitch and roll angular velocities to maintain the desired orientation and compensatefor the righting moments while realizing a body-pure motion. Thus, at least three inputcontrol vectors are now needed for a generic body-pure motion; pitch, roll and theprescribed direction of motion. In practice, four input control vector fields are usuallycontrolled so that one could compensate the righting moments and run a feedbackcontrol in yaw to maintain the proper heading angle during the trajectory. However,there is no restoring moment in yaw and thus theoretically does not need to be directlycontrolled. If we additionally assume that the vehicle is not neutrally buoyant, we thenhave to apply constant heave control in order to maintain a prescribed depth. With thisadditional assumption, we would need at least four input control vectors to realize abody-pure motion.
Notice that when considering bounded controls it implies a controllability restric-tion due to the righting moments acting on the angular velocities. If the separationbetweenCG andCB is large, the righting moments will be significant and the vehiclemay not be able to realize all orientations in pitch and roll.
Based on Definition 4.2, if we generalize the notion of decoupling vector field toforced affine-connection control system our previous observations can be summarizedin the following proposition.
PROPOSITION5.1. Let ∇ be the affine connection (13) and consider the forced inputaffine-connection control system
∇γ ′γ ′ =(
M−1(
Dν(ν)ν)
J−1(
DΩ(Ω)Ω− rB×RtρgV k)
)
+Yiϕνi +3
∑j=1
YjτΩ j ,
where i∈ U , and Yk = vlft(I−1k ). Then, every multiple ofI−1
i is a decoupling vectorfield for this system.
If we consider the forced input affine-connection control system
∇γ ′γ ′ =(
M−1(
Dν(ν)ν)
J−1(
DΩ(Ω)Ω− rB×RtρgV k)
)
+3
∑j=1
YjτΩ j ,
where and Yj = vlft(I−1j ). Then, every multiple ofI−1
j is a decoupling vector field forthis system.
REMARK 5.2. The corresponding motions to the vector fieldsYi of the first part of theproposition are pure translations while the ones corresponding to second part are thepure rotations.
Proposition 5.1 can be seen as a consequence of our first observations on affine con-nection control system. Indeed, even when considering external forces the followingrelation holds:
[Yi , [Y0,Yi ]](χ) = vlft(2∇I−11
I−1i ) (77)
Since the vlft map is injective we can conclude from Proposition 3.10 that for a rigidbody moving in a real fluid∇
I−11
I−1i ∈ I
−1i . Proposition 5.1 then follows from the
following remark. Along pure motions the only external forces to consider are the
26

drag in the direction of motion, plus the restoring moments.Using feedback controls,we can compensate the righting moments (if possible with thebounded controls) inpitch and roll. This allows us to view the system as a single input affine-connectioncontrol system, for which the external forces are included in the input vector field. Weconclude the proof of Proposition 5.1 using Proposition 3.10.
The previous generalization of decoupling vector fields to aforced affine-connectioncontrol system is straightforward since our system is initially fully actuated. The ideawas simply to extract the minimum number of necessary input control vector fields toproduce the desired motions. At this stage, a proper generalization for decoupling vec-tor fields when the forced system is underactuated is not clear. It is our hope that theconnection between Proposition 3.10 and the existence of decoupling vector fields wemade in this paper will lead the way.
As a final remark, we finish the paper with a short discussion onthe optimality ofpure motions.
5.1 Pure Motions and Time Optimality
Clearly, pure motions are not the first option for time optimal motion. However, study-ing these motions helps develop new strategies for time optimal trajectory construction.Using the maximum principle, it has been proven on a 2-dimensional model that eventhough pure motions are extremals (with the controls set to zero being singular) theyare not time optimal, see [10]. Moreover, concatenation of pure motions eliminatestheir extremality property. Below we consider the 3D systemwith external forces andcompare a pure motion trajectory to the time optimal trajectory.
Now, in Figure 2, we show a concatenated pure motion strategy; displaying onlygraphs of variables which are not identically zero. Note that this trajectory is formed
0 20 40 60−10
0
10
γ ν 1
0 20 40 60−10
0
10
γ ν 2
0 20 40 60−20
0
20
40
γ ν 3
t (s)
0 20 40 600
5
10
b 1
0 20 40 600
2
4
b 2
0 20 40 600
0.5
1
b 3
t (s)
Figure 2:Pure surge, pure sway then pure heave ending atηT = (6,4,1,0,0,0).
27

by a pure surge acceleration fortaccsurge≈ 38.39 s, a deceleration fortdec
surge≈ 3.74 s, apure sway acceleration fortacc
sway≈ 25.89 s, a deceleration fortdecsway≈ 3.74 s, a pure
heave acceleration fortaccheave≈ 2.92 s and a deceleration fortdec
heave≈ 5.24 s. The non-symmetry of the acceleration and deceleration phases is dueto drag forces and physicalactuator asymmetries (our computations are based on a real underwater vehicle). Thetotal transfer time for this trajectory istpure≈ 79.92 s. This duration is more than triplethe optimal time! This is actually not that surprising sincethe pure motion trajectoryuses only a fraction of the available thrust at any given time.
In terms of trajectory design for autonomous underwater vehicles we can concludethat a pure motion control strategy is attractive for our problem due to its piecewiseconstant structure but it is far from time efficient. Notice that the same should betrue when considering energy consumption. Either way, it isinefficient to concatenatemotions through configurations at rest. On the other hand, in[5] we explain whythe time optimal trajectory is not conceivable for implementation on a real vehicle(due mostly to the singular arcs and the large number of switching times). The ideapresented in [5] is to develop an algorithm taking the advantages of both methods, i.e.a simple control structure combined with time efficiency.
References
[1] B. Bonnard and M. Chyba. “Singular Trajectories and their Role in Control The-ory”. Springer-Verlag, 2003.
[2] F. Bullo and A. D. Lewis, ”Kinematic Controllability forDecoupled TrajectoryPlanning in Underactuated Mechanical Systems”,IEEE Transactions. Roboticsand Automation, 17(4), pp. 402-412, 2001.
[3] F. Bullo and A.D. Lewis. Geometric Control of MechanicalSystems Modeling,Analysis, and Design for Simple Mechanical Control Systems. Springer-Verlag,New York-Heidelberg-Berlin, 49 in Texts in Applied Mathematics, 2004.
[4] M. Chyba, T. Haberkorn, R.N. Smith, S.K. Choi. “Designand Implementation of Time Efficient Trajectories for Au-tonomous Underwater Vehicles”. Preprint, University of Hawaii(http://www.math.hawaii.edu/ mchyba/publications/index.htm)., 2007.
[5] M. Chyba, T. Haberkorn, R.N. Smith, S.K. Choi. , 2006.
[6] M. Chyba, T. Haberkorn, R.N. Smith, S.K. Choi. Design andImplementationof Time Efficient Trajectories for Autonomous Underwater Vehicles.Ocean En-gineering journal, in press (http://dx.doi.org/10.1016/j.oceaneng.2007.07.007),2007.
[7] M. Chyba and T. Haberkorn. Autonomous Underwater Vehicles: Singular Ex-tremals and Chattering.Proceedings of the 22nd IFIP TC 7 Conference on SystemModeling and Optimization, Italy, 18-22 July 2005.
28

[8] M. Chyba and T. Haberkorn. “Designing Efficient Trajectories for UnderwaterVehicles Using Geometric Control Theory”.Proceedings of the 24rd Interna-tional Conference on Offshore Mechanics and Arctic Engineering, Greece, 12-17June 2005.
[9] M. Chyba, N.E. Leonard and E.D. Sontag. “Singular Trajectories in the Multi-Input Time-Optimal Problem: Application to Controlled Mechanical Systems”.Journal on Dynamical and Control Systems9(1):73-88, 2003.
[10] M. Chyba. “Underwater Vehicles: A Surprising Non Time-Optimal Path”.In42thIEEE Conf. on Decision and Control, Maui 2003.
[11] M.Chyba, H. Maurer, H.J. Sussmann and G. Vossen. “Underwater Vehicles: TheMinimum Time Problem”. InProceedings of the 43th IEEE Conf. on Decisionand Control, Bahamas, 2004.
[12] C.J. Catone, M. Chyba, R.N. Smith, G.R. Wilkens. “Decoupling Vector Fieldsfor a Submerged Rigid Body in an Ideal Fluid”. Submitted to46th IEEE Conf. onDecision and Control, 2007.
[13] T.I.Fossen. “Guidance and Control of Ocean Vehicles”.Wiley, New York, 1994
[14] R. Fourer, D.M. Gay and B.W. Kernighan. “AMPL: A Modeling Languagefor Mathematical Programming”.Duxbury Press, Brooks-Cole Publishing Com-pany,1993.
[15] C.Y. Kaya and J.L. Noakes. “Computation Method for Time-Optimal SwitchingControl”. Journal of Optimization Theory and Applications, 117(1):69-92, 2003.
[16] E. Hairer, S.P. Norsett and G. Wanner.“Solving Ordinary Differential Equations I.Nonstiff Problems. 2nd edition”.Springer Series in Computational Mathematics,Springer Verlag, 1993.
[17] H. Lamb, Hydrodynamics.Dover, New York, 6th Edition, 1932.
[18] N.E. Leonard. “Stability of a Bottom-Heavy UnderwaterVehicle”. Automactica,33(3):331-46, 1997.
[19] N.E. Leonard.Stabilization of Steady Motions of an Underwater Vehicle, Proc. ofthe 35th IEEE Conference on Decision and Control, 1996.
[20] H. Maurer, C. Buskens, J-H.R. Kim and I.C. Kaya. “Optimization Methods forNumerical Verification of Second Order Sufficient Conditions for Bang-BangControls”.Optimal Control Application and Methods, 26:129-156, 2005.
[21] J.P. Mcdanell and W.F. Powers.Necessary conditions for joining optimal singularand nonsingular subarcs. SIAM J. Control, 4(2): 161-173, 1971.
[22] H.M. Robbins. A generalized Legendre-Clebsh condition for the singular casesof optimal control.IBM J. Res. Develop11:361-372, 1967.
29

[23] L.S. Pontryagin, B. Boltyanski, R. Gamkrelidze, E. Michtchenko. The Mathemat-ical Theory of Optimal Processes. Interscience, New-York,1962.
[24] D.J. Saunders. The Geometry of Jet Bundles.# 142 in London MathematicalSociety Lecture Notes Series Cambridge Univ. Press, New York, 1959.
[25] A. Waechter and L. T. Biegler. “On the Implementation ofan Interior-Point Filter-Line Search Algorithm for Large-Scale Nonlinear Programming”. Research Re-port RC 23149, IBM T.J. Watson Research Center, Yorktown, New-York.
[26] M.I. Zelikin, V.F. Borisov. Theory of Chattering Control. Birkhauser, Boston,1994.
30