Geometric Image Transformations - Vis Centerryang/Teaching/cs635-2016spring/...Geometric Image...
28
1 Geometric Image Transformations Part One 2D Transformations • Spatial Coordinates – (x,y) are mapped to new coords (u,v) – pixels of source image -> pixels of destination image • Types of 2D Transformations – Affine • Scales • Translations • Rotations • Shears – Projective • Projections • Homographies or Collineations
Transcript of Geometric Image Transformations - Vis Centerryang/Teaching/cs635-2016spring/...Geometric Image...
1
Geometric Image Transformations
Part One
2D Transformations• Spatial Coordinates
– (x,y) are mapped to new coords (u,v)– pixels of source image -> pixels of destination
image• Types of 2D Transformations
– Affine• Scales• Translations• Rotations• Shears
– Projective• Projections • Homographies or Collineations

2
Scale and Translation
• Scale– u = s_x * x– v = s_y * y
• Translation– u = x + t_x– v = y + t_y
Rotation and Shears
• Rotation– u = x*cos θ - y * sin θ– v = x*sin θ + y * cos θ
• Shear– u = x + Sh_x * y– v = y + Sh_y * x
3
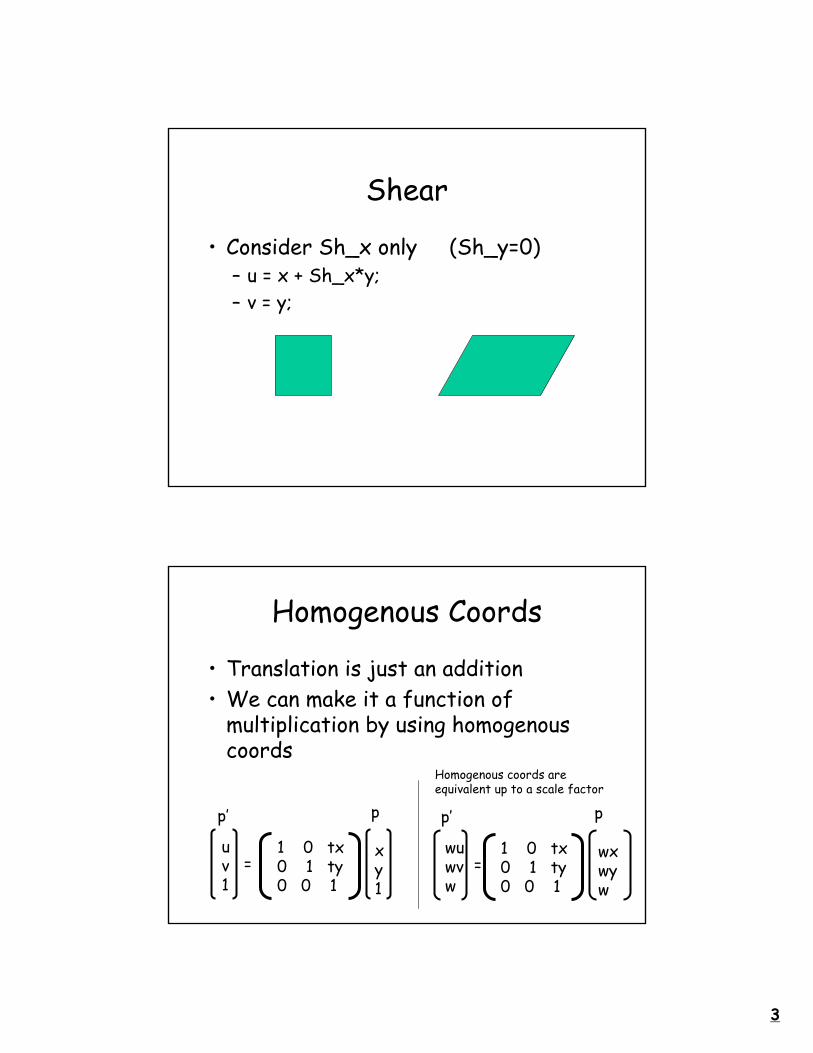
Shear
• Consider Sh_x only (Sh_y=0)– u = x + Sh_x*y;– v = y;
Homogenous Coords
• Translation is just an addition• We can make it a function of
multiplication by using homogenous coords
xy1
p
=uv1
p’
1 0 tx 0 1 ty 0 0 1
wxwyw
p
=wuwvw
p’
1 0 tx 0 1 ty 0 0 1
Homogenous coords are equivalent up to a scale factor

4
Homogenous Coordinates• Transform works on scale (w)
* w
Dividing by the scale “w” puts you in Cartesian coords
w=1
Matrix Notation
a b c d e f 0 0 1
xy1
Affine p
=
uv1
p’

5
Matrix notation of transforms
1 0 tx 0 1 ty 0 0 1
xy1
p
=uv1
p’
Sx 0 0 0 Sy 0 0 0 1
xy1
p
=uv1
p’
cosθ -sinθ 0 sinθ cosθ 0
0 0 1
xy1
p
=uv1
p’
1 Shx 0 Shy 1 00 0 1
xy1
p
=uv1
p’
Translation Scale
Rotation Shear
Concatenation
• You can concatenate several transforms into one matrix
A = R S Sh Trotate scale shear translate

6
Affine Transformations
Affine is a linear mapping plus a translation:– A function f(x) is linear iff
• f(x+y) = f(x) + f(y)• a*f(x) = f(a*x)
– A function T(x) is Affine if there exists• a linear mapping L(x)• and a constant “c”• Such that: T(X) = L(x) + c (for all x)
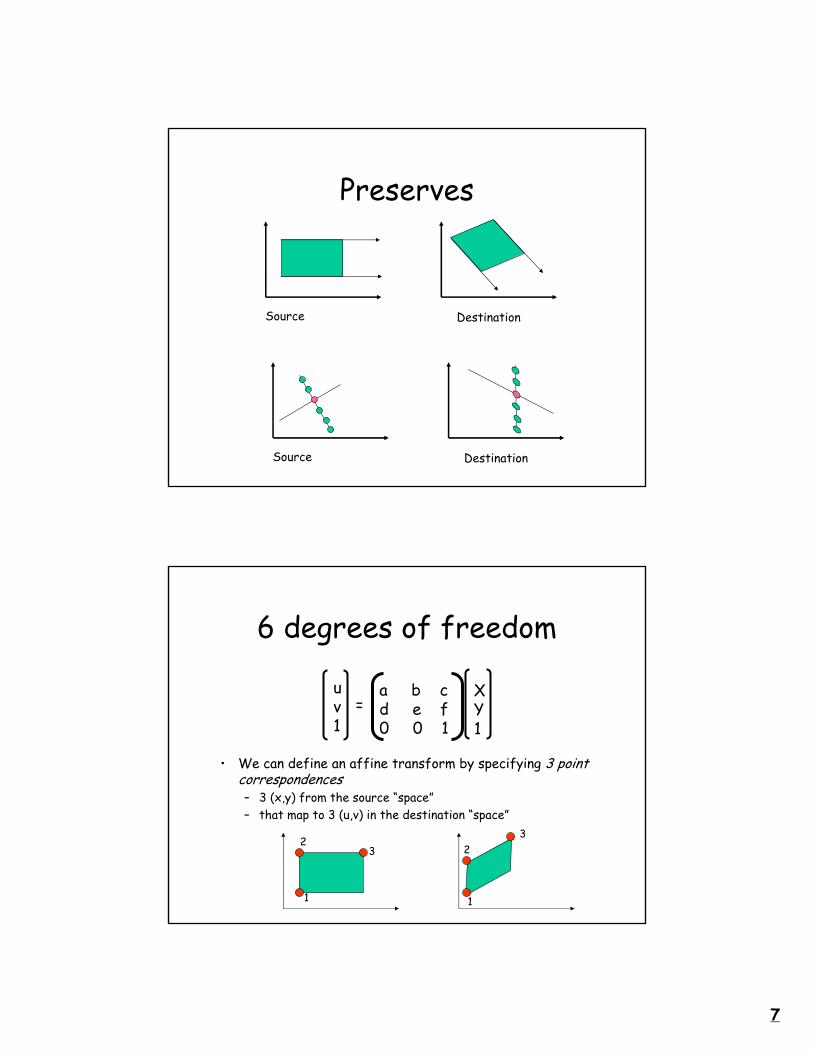
Affine Transforms’ Properties
• Preserves parallel lines• Preserves equispaced points along lines
– equally spaced points on a line in the source space
– will produce equally spaced points on a line in the destination space
– (although the scale may be different)• Preserves incident
– Points of intersection hold
7
Preserves
Source Destination
Source Destination
6 degrees of freedom
XY1
=uv1
a b cd e f 0 0 1
• We can define an affine transform by specifying 3 point correspondences– 3 (x,y) from the source “space”– that map to 3 (u,v) in the destination “space”
1
23
1
23
8
Equations to solve for Affine Transform
• u1 = a*x1 + b*y1 + c• u2 = a*x2 + b*y2 + c• u3 = a*x3 + b*y3 + c
• v1 = d*x1 + e*y1 + f• v2 = d*x2 + e*y2 + f• v3 = d*x3 + e*y3 + f
More commonly
• You can build an Affine transform by concatenating several transforms together– translate to the origin– Rotate by 20 degrees– translate back from the origin– scale by 5
GUI Interface tool that allows you to rotate,translate, scale, etc . .
9
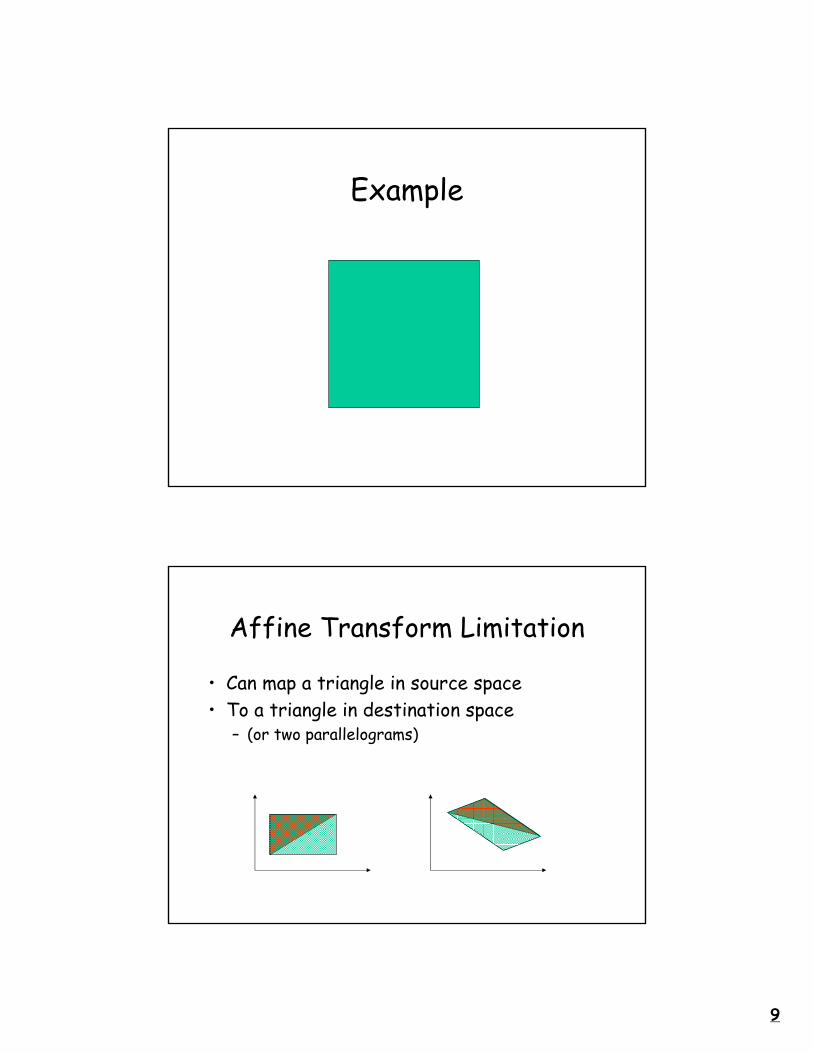
Example
Affine Transform Limitation
• Can map a triangle in source space• To a triangle in destination space
– (or two parallelograms)

10
Affine Transform Limitation
• Can map a triangle in source space• To a triangle in destination space
– (or two parallelograms)
• What about a rectangle to a general quadrilateral?
Projective Transform
• Projective transform can transform general quadrilaterals between source and destination space
• Does not preserve parallel lines, or lengths
• Does not preserve equispaced points

11
Projective transform uses homogenous coords
xy1
=susvs
a b cd e f g h 1
u’ = u/sv’ = v/s
Maps us back to Cartesian space
Projective Transforms• Very common in computer graphics
– Texture mapping a 3D polygon – polygon has been projected onto a plane
Texture map3D perspectiveprojection
3D polygon
2D polygon
12
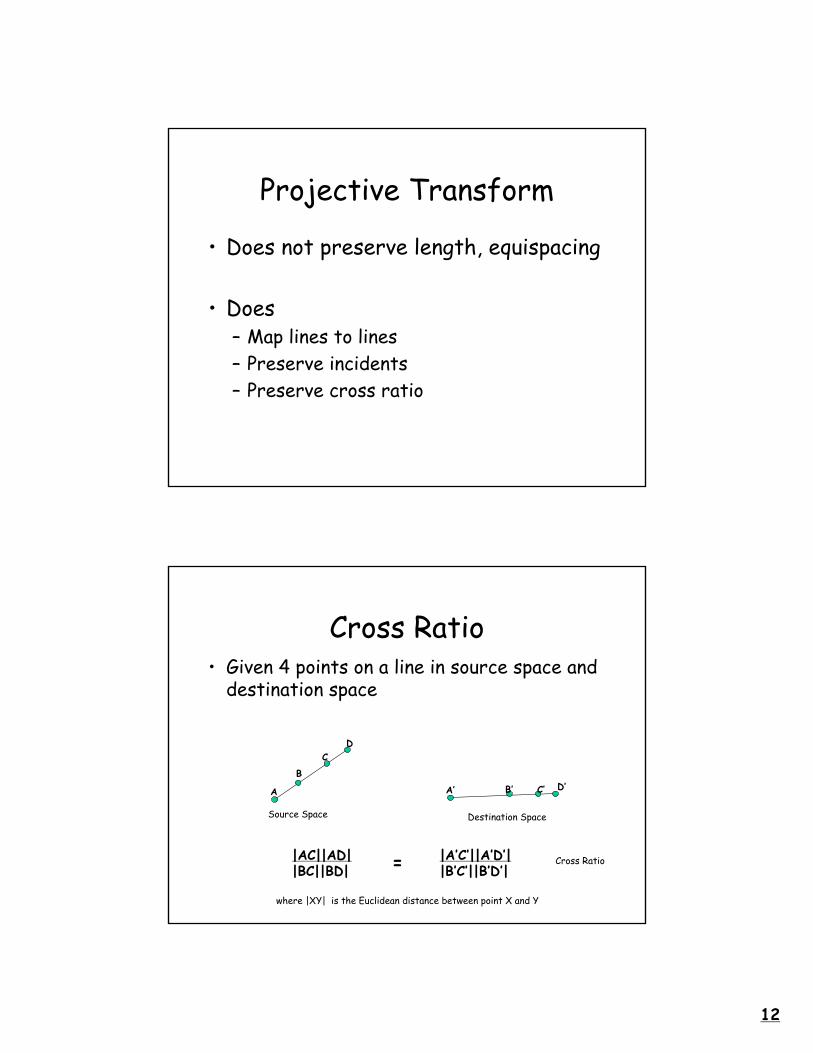
Projective Transform
• Does not preserve length, equispacing
• Does– Map lines to lines– Preserve incidents – Preserve cross ratio
Cross Ratio• Given 4 points on a line in source space and
destination space
A
B
CD
Source Space
A’ B’ C’ D’
Destination Space
|AC||AD||BC||BD|
|A’C’||A’D’||B’C’||B’D’|=
where |XY| is the Euclidean distance between point X and Y
Cross Ratio
13
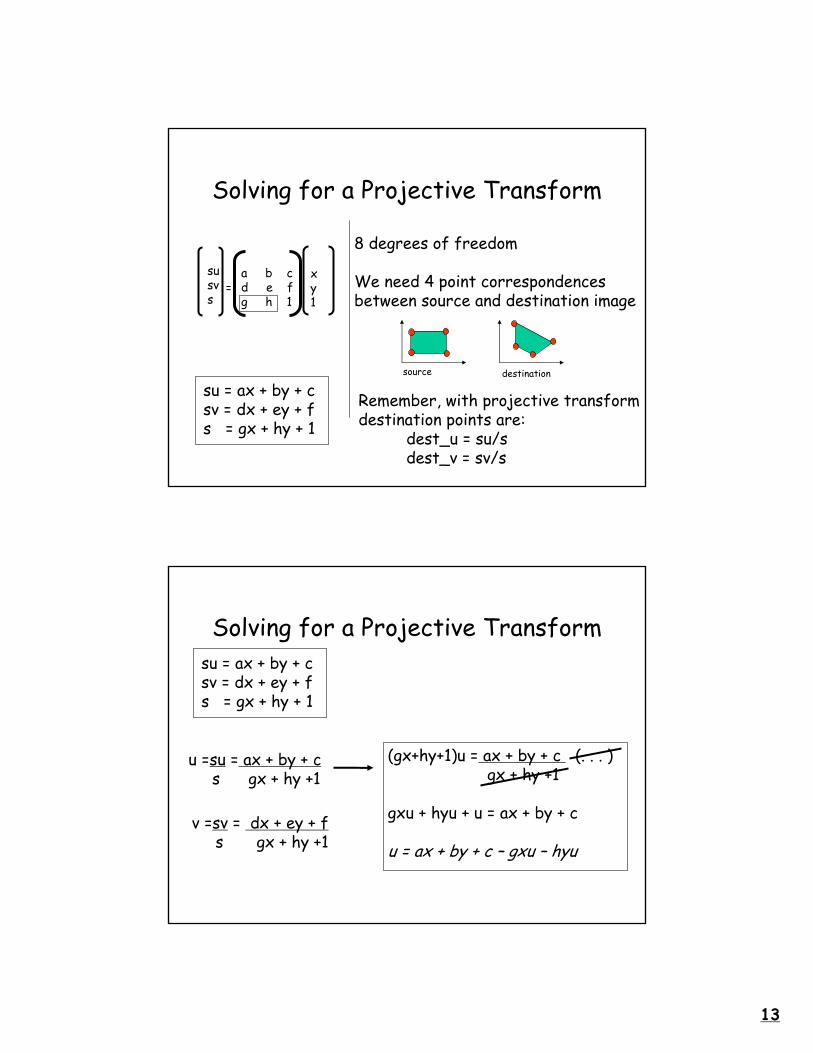
Solving for a Projective Transform
xy1
=susvs
a b cd e f g h 1
8 degrees of freedom
We need 4 point correspondencesbetween source and destination image
su = ax + by + csv = dx + ey + fs = gx + hy + 1
source destination
Remember, with projective transform destination points are:
dest_u = su/sdest_v = sv/s
Solving for a Projective Transformsu = ax + by + csv = dx + ey + fs = gx + hy + 1
u =su = ax + by + cs gx + hy +1
v =sv = dx + ey + fs gx + hy +1
(gx+hy+1)u = ax + by + c (. . . )gx + hy +1
gxu + hyu + u = ax + by + c
u = ax + by + c – gxu – hyu
14
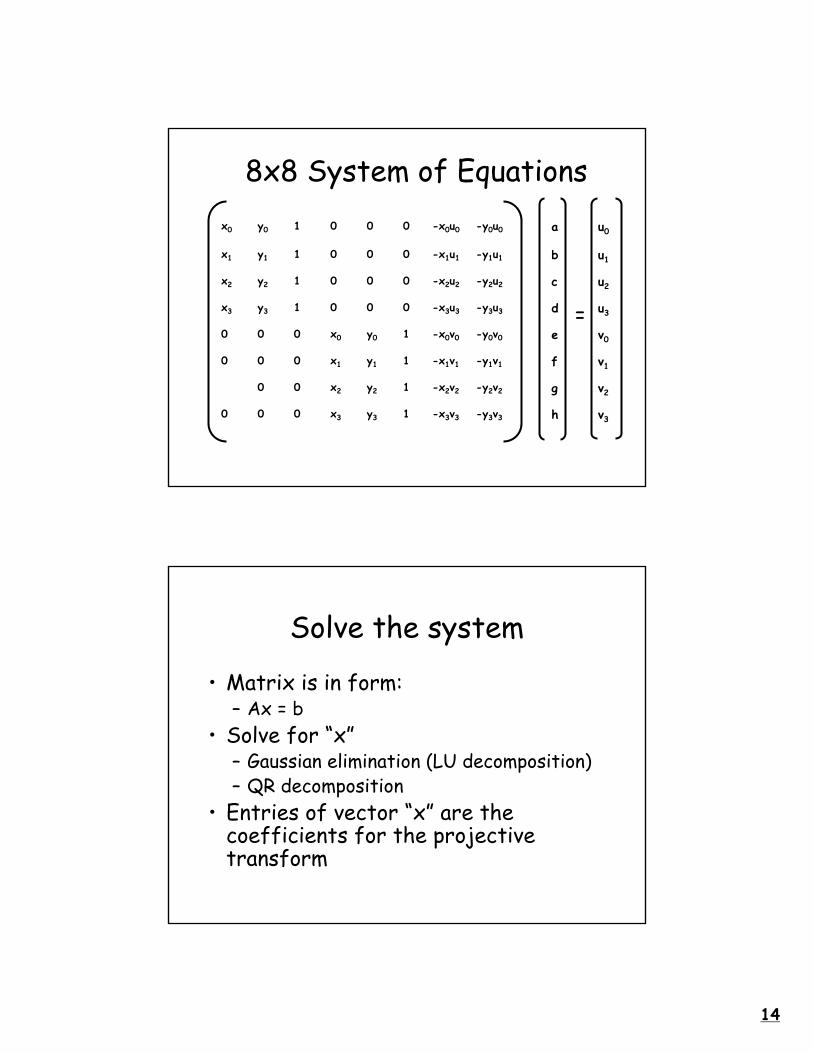
8x8 System of Equations
v3h-y3v3-x3v31y3x3000
v2g-y2v2-x2v21y2x200
v1f-y1v1-x1v11y1x1000
u3d-y3u3-x3u30001y3x3
v0e-y0v0-x0v01y0x0000
u2c-y2u2-x2u20001y2x2
u1b-y1u1-x1u10001y1x1
u0a-y0u0-x0u00001y0x0
=
Solve the system
• Matrix is in form:– Ax = b
• Solve for “x”– Gaussian elimination (LU decomposition)– QR decomposition
• Entries of vector “x” are the coefficients for the projective transform

15
Properties of Transforms
XXnon-uniform scale
Xcombination (w/ projection)
Xprojection
XXshear
XXXuniform scale
XXXXrotation
XXXXtranslation
Transformation
projectiveaffinesimilarityeuclidean
Properties of Transforms
XXXparallelism
XXXXcross ratio
XXXXincident
XXratio of lengths
XXangle
Xlength
Invariant
projectiveaffinesimilarityeuclidean
16
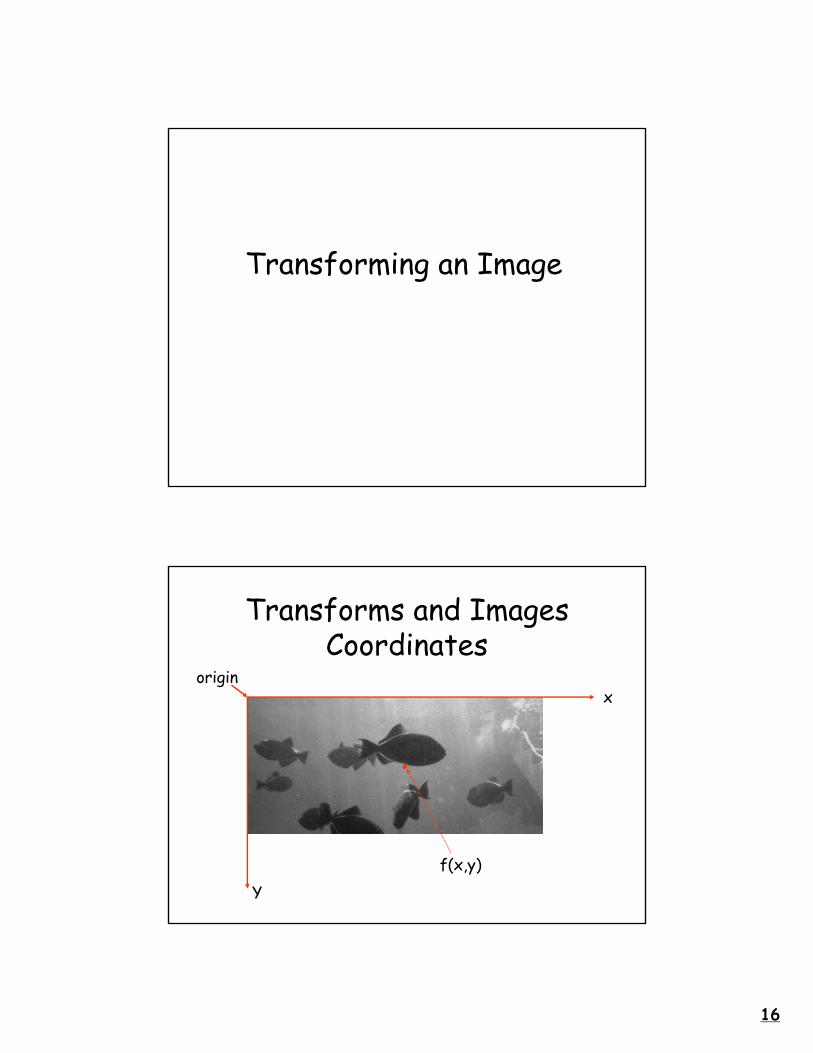
Transforming an Image
Transforms and Images Coordinates
Y
xorigin
f(x,y)

17
Image Coords vs. Cartesian Coords
• Image Coords are generally defined by raster alignment– Y [0,Height], X [0,Width]
• Affine, projective transforms are converted into Cartesian coords
Transforms and Images Coordinates
Y
xorigin
f(x,y)
(-y value)

18
Cartesian space to image space
• From Cartesian space to Image Space– find (x_min, xmax)– find (y_min, ymax)
– new size dimensions• w = x_max – x_min• h = y_max – y_min• create newImage size (w, h)
– Translate transformed points, such that:• T * (x,y) = (u,v)• newImage( u + abs(x_min), v + abs(y_min) = I(x,y)
Converting to an Image
Y
xorigin
New Image Dimensions

19
The transformed image
Y
xorigin New Image Dimensions
Creating the “new” image
• Forward Mapping • Inverse Mapping• Sampling
20
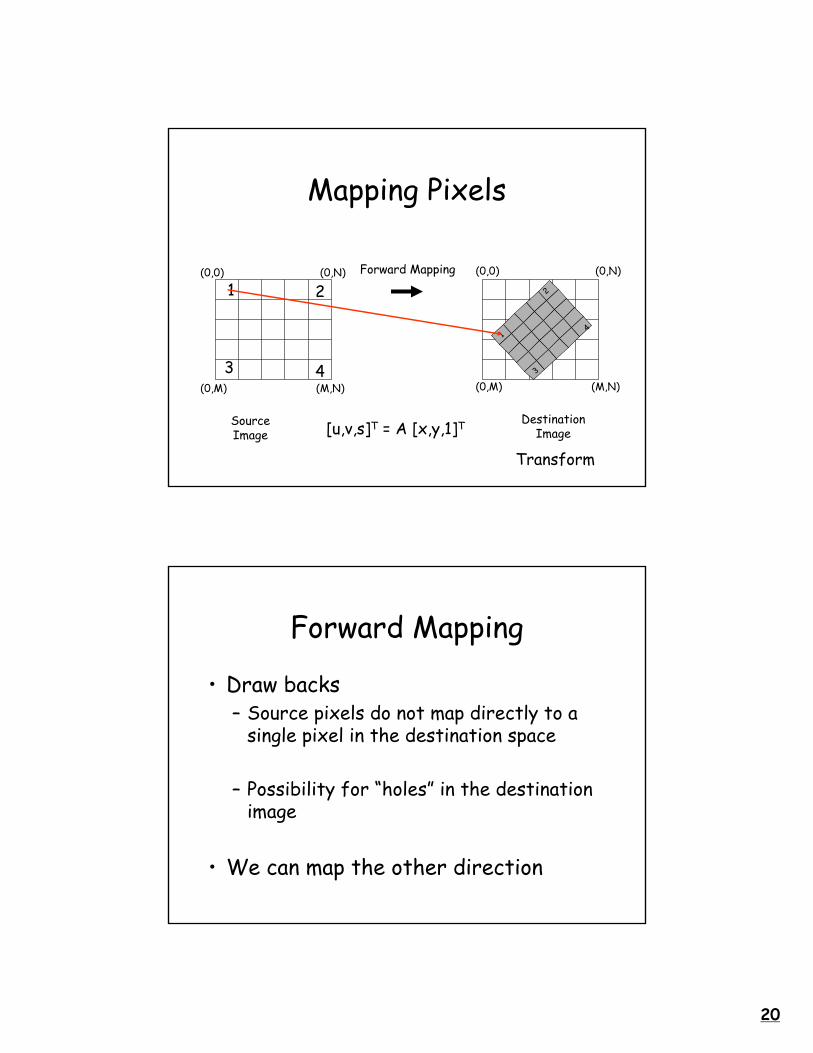
Mapping Pixels
(0,0) (0,N)
(0,M) (M,N)
Transform
(0,0) (0,N)
(0,M) (M,N)
1 2
3 4
1
2
3
4
DestinationImage
SourceImage
Forward Mapping
[u,v,s]T = A [x,y,1]T
Forward Mapping
• Draw backs– Source pixels do not map directly to a
single pixel in the destination space
– Possibility for “holes” in the destination image
• We can map the other direction

21
black
Reverse Mapping
(0,0) (0,N)
(0,M) (M,N)
1 2
3 4
1
2
3
4
Reverse Mapping
1
23
4
1 2
3 4
[x,y,s]T = A-1[u,v,1]T
“Inverse” Mapping
• Advantages– We assign an “intensity” to each pixel in
the destination (no holes)– Affine/projective transforms have
inverses (not a problem)• just reverse direction of the point
correspondences• We still don’t have pixel to pixel
mapping
22
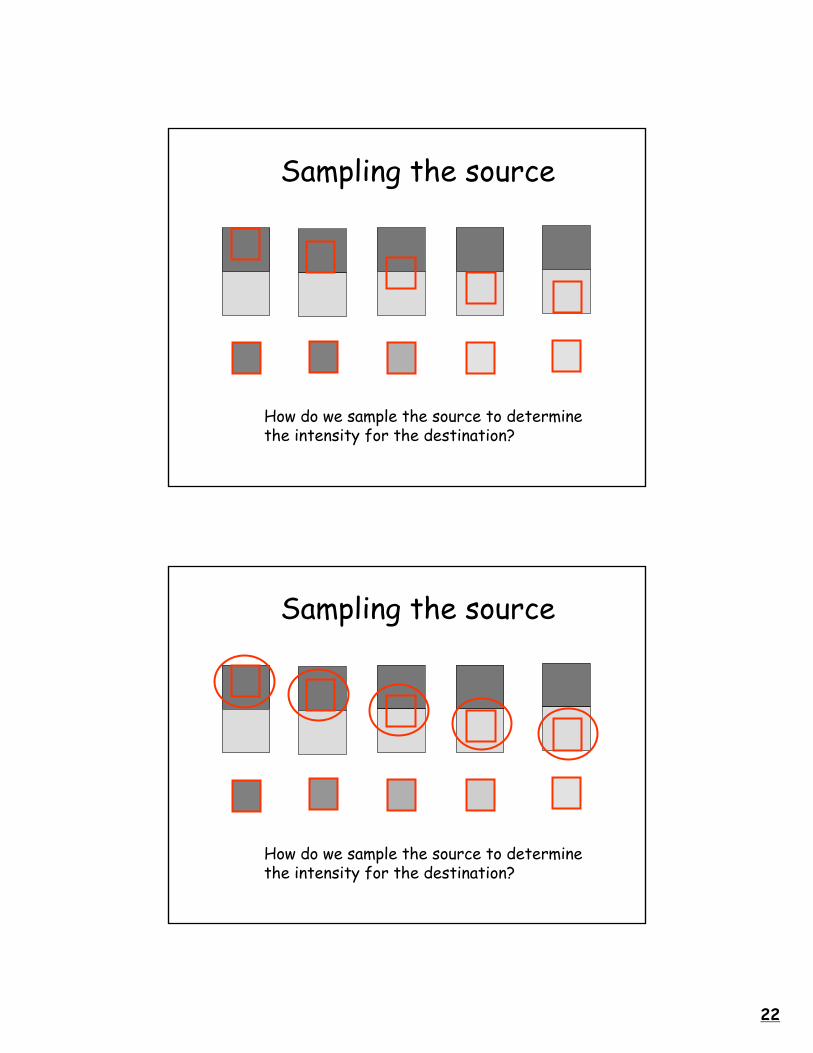
Sampling the source
How do we sample the source to determinethe intensity for the destination?
How do we sample the source to determinethe intensity for the destination?
Sampling the source

23
MappingSource
2 x 2 pixels
Option 1 : Pick the pixel nearest to our center.
MappingSource
2 x 2 pixels
Option 1 : Pick the pixel nearest to our center.
Small change results in big difference

24
Try different samplingSource
2 x 2 pixelsWhat if we assign an intensityto each vertex and then average?
1 2
3 4
1 2 3 4
Pick the intensity which the vertexlies.
New Sample =
Sampling ExampleSource
2 x 2 pixelsMove the destination slightly.
1 2
3 4
1 2 3 4
Pick the intensity which the vertexlies.
New Sample =

25
No DifferenceSource
2 x 2 pixels
1 2
3 4
Source2 x 2 pixels
1
2
3
4
Try different SamplingSource
2 x 2 pixels
1
23
4
What if we had more samples?
26
Try different SamplingSource
2 x 2 pixels
1 2
34
What if we sampleda larger area?
Try different SamplingSource
2 x 2 pixelsHow should we sample?

27
Common Sampling Approaches• Nearest Neighbor
– 1 Sample– Take closest pixel value
• Bi-linear Interpolation– 2x2 (4) Samples– Interpolate from these samples– Slower
• Bi-Cubic– 4x4 (8) samples– Construct a new sample using a non-linear “interpolation”– Slower
Common Sampling Approaches
Bi-Cubic
Bi-linear Interpolation
Nearest Neighbor

28
Common Sampling Approaches
Bi-Cubic
Bi-linear Interpolation
Nearest Neighbor
•What do these approaches mean?
•How can evaluate what they are doing?
Sampling and Signal Processing• Proper sampling is a classic “reconstruction problem”• Given a continuous signal f(x)• How do you take discrete samples such that you can properly
reconstruct the signal f(x) from the samples?
f(x)
x