GENERALIZAÇÃO DO MÉTODO DA APROXIMAÇÃO EXPLÍCITA DE …
186
GENERALIZAÇÃO DO MÉTODO DA APROXIMAÇÃO EXPLÍCITA DE GREEN PARA A SOLUÇÃO DE EQUAÇÕES PARABÓLICAS E HIPERBÓLICAS Felipe dos Santos Loureiro Rio de Janeiro Março de 2011 Tese de Doutorado apresenta da ao Programa de Pós-graduação em Engenharia Civil, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Doutor em Engenharia Civil. Orientador: Webe João Mansur
Transcript of GENERALIZAÇÃO DO MÉTODO DA APROXIMAÇÃO EXPLÍCITA DE …
i
GENERALIZAÇÃO DO MÉTODO DA APROXIMAÇÃO EXPLÍCITA DE GREEN
PARA A SOLUÇÃO DE EQUAÇÕES PARABÓLICAS E HIPERBÓLICAS
Felipe dos Santos Loureiro
Rio de Janeiro
Março de 2011
Tese de Doutorado apresenta da ao
Programa de Pós-graduação em Engenharia
Civil, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Doutor
em Engenharia Civil.
Orientador: Webe João Mansur

iii
Loureiro, Felipe dos Santos
Generalização do método da aproximação explícita de Green
para a solução de equações parabólicas e hiperbólicas/ Felipe dos
Santos Loureiro. - Rio de Janeiro: UFRJ/COPPE, 2011.
IX, 177 p.: il.; 29,7 cm
Orientador: Webe João Mansur
Tese (doutorado) – UFRJ/ COPPE/ Programa de Engenharia
Civil, 2011.
Referências Bibliográficas: p. 166-177.
1. Equações parabólicas e hiperbólicas. 2. Funções de Green
numéricas. 3. Método dos Elementos Finitos. I. Mansur, Webe
João. II. Unive rsidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Civil. III. Título.

iv
Aos meus pais, Fernando e Rosa,
ao meu irmão Fernando Filho.

v
AGRADECIMENTOS
Ao professor Webe Mans ur pela amizade e orientação ao longo desses anos desde a
iniciação científica. O autor é grato pelas i númeras discussões e oportunidades
oferecidas pelo orientador que contribuíram bastante para sua formação acadêmica.
Ao professor Luiz Wrobel pela excelente acolhida na Brunel University de Londres e
por mudar profundamente minha maneira de pensar com relação à vida acadêmica.
A Ivone por sua amizade e ajuda nas questões burocráticas. Seu espírito jovem e de
união de grupo tornou o trabalho no LAMEC mais alegre e divertido.
Aos amigos e colegas de trabalho do LAMEC João Pau lo, Edmundo, Vasconcellos,
Fernanda Brenny, Rodrigo Camargo, Rodrigo Dias, Mich elle, Pablo, Raul, Newton,
Ana, Viviane, Wellington, Marco e Álvaro.
Ao Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPQ) e
Coordenação de Aperfeiçoamento de Pe ssoal de Nível Superior (CAPES)-No.
BEX4623/08-8 pelo apoio financeiro.

vi
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
GENERALIZAÇÃO DO MÉTODO DA APROXIMAÇÃO EXPLÍCITA DE GREEN
PARA A SOLUÇÃO DE EQUAÇÕES PARABÓLICAS E HIPERBÓLICAS
Felipe dos Santos Loureiro
Março/2011
Orientador: Webe João Mansur
Programa: Engenharia Civil
A presente tese tem como objetivo generalizar o m étodo da aproximação
explícita de Green ExGA (“Explicit Green’s Approach”) aplicado as equações
parabólicas e hiperbólicas. Utilizando o método dos resíduos ponderados t anto no
tempo quanto no espaço, a expressão integral do método ExGA é estabelecida de forma
geral. A função de Green é calculada numericamente empregando o método dos
elementos finitos no esp aço e o método-θ no tem po, resultando e m uma matriz de
Green relativa ao modelo discreto. Subpassos de tempo são utilizados para aumentar a
precisão da matriz de Green no instante de tempo t t= Δ . Para reduzir o custo
computacional relacionado ao cálculo da fu nção de Green para a equação hiperbólica,
um novo método denominado método da aproximação de Green local LExGA (“Local
Explicit Green’s Approach”) baseado no princípio da causalidade é proposto. O método
LExGA calcula a função de Green localmente usando subdomínios com suas
respectivas submalhas construídas em volta do ponto fonte para capturar somente os
valores não-nulos inferidos pelo pr incípio da causalidade. Uma metodologia robusta
baseado no princípio da conservação da en ergia é proposta para determinar o tamanho
correto de cada submalha. Finalmente, para validar e mostrar as poten cialidades das
formulações propostas, os resultados numéricos são co mparados com aqueles obtidos
pelos métodos clássicos existentes na literatura.

vii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
GENERALIZATION OF THE EXPLICIT GREEN’S APPROACH METHOD TO
SOLVE PARABOLIC AND HYPERBOLIC EQUATIONS
Felipe dos Santos Loureiro
March/2011
Advisor: Webe João Mansur
Department: Civil Engineering
The present thesis aims at generalizing the explicit Green’s approach (ExGA)
method applied to parabolic and hyperbolic equations. By means of the w eighted
residual method in both time and space, the integral expression of the ExGA method is
established in a general way. The Green’s function is calculated by employing the finite
element method in s pace and the θ -method in time, giving rise t o a Green’s matrix
related to the discrete model. Time substeps are adopted to increase the precision of the
Green’s matrix at time instant t t= Δ . In order to reduce the computational cost
concerning the Green’s function calculation for the hyperbolic equation, a new method
called local explicit G reen’s approach (LExGA) based on t he causality principle is
proposed. The LExGA method computes the Green’s function locally through the use
of subdomains with their respective submeshes constructed around the source point to
capture only the non-null val ues inferred by the caus ality principle. A robust
methodology based upon the energy conservation is proposed to find the correct size of
each submesh. Finally, in order to validate and show the potentialities of the proposed
formulations, the nu merical results are compared with those obtained by classical
methods found in the literature.
viii
Índice
1 Introdução ............................................................................................................... 1
1.1 Importância dos métodos numéricos ................................................................. 1
1.2 Breve revisão bibliográfica ................................................................................ 2
1.3 Motivação, objetivos e organização da tese....................................................... 8
2 Método da Aproximação Explícita de Green para Problemas Transientes de
Condução de Calor: Equação Parabólica .................................................................. 10
2.1 Introdução ........................................................................................................ 10
2.2 Equações governantes...................................................................................... 10
2.3 Expressão integral do método da aproximação Explícita de Green ................ 15
2.3.1 Formulação pelo método dos resíduos ponderados.................................. 15
2.3.2 Discretização espacial e temporal............................................................. 19
3 Cálculo Numérico da Função de Green e o Conceito de Subpassos de
Tempo.... ........................................................................................................................ 24
3.1 Introdução ........................................................................................................ 24
3.2 Discretização espacial pelo método dos elementos finitos .............................. 25
3.3 Discretização temporal utilizando o método-θ e subpassos de tempo ........... 29
3.4 Considerações numéricas................................................................................. 33
3.4.1 Função de Green modificada.................................................................... 33
3.4.2 Aproximação para a convolução .............................................................. 36
3.4.3 Cálculo da Solução particular................................................................... 39
4 Análise de Convergência com Relação a Variável Temporal........................... 45
4.1 Introdução ........................................................................................................ 45
4.2 Conceito de estabilidade .................................................................................. 46
4.3 Matriz de Green analítica e Diagonalização .................................................... 48
4.4 Análise de acurácia e estabilidade para o método da aproximação explícita de
Green ...........................................................................................................................52

ix
5 Método da Aproximação Explícita de Green para Problemas Governados pela
Equação Escalar da Onda: Equação Hiperbólica ..................................................... 65
5.1 Introdução ........................................................................................................ 65
5.2 Equações Governantes ..................................................................................... 66
5.2.1 Equação escalar da onda........................................................................... 66
5.2.2 A função de Green.................................................................................... 67
5.3 Expressão integral do método ExGA............................................................... 69
5.4 Expressões integrais alternativas para o método ExGA .................................. 73
5.5 Condição de contorno não-reflexiva................................................................ 78
5.6 Discretização espacial e procedimento de marcha no tempo........................... 84
6 Cálculo Numérico da Função de Green Através de Subdomínios ................... 91
6.1 Introdução ........................................................................................................ 91
6.2 Conceitos matemáticos sobre os subdomínios................................................. 92
6.3 Discretização espacial e temporal.................................................................... 94
6.4 Análise de estabilidade e acurácia no domínio temporal............................... 100
6.5 Determinação do tamanho dos subdomínios discretos utilizando o princípio da
conservação da energia............................................................................................. 109
7 Resultados Numéricos ........................................................................................ 119
7.1 Introdução ...................................................................................................... 119
7.2 Exemplos numéricos: Equação parabólica .................................................... 120
7.2.1 Considerações iniciais ............................................................................ 120
7.2.2 Análise de convergência......................................................................... 120
7.2.3 Condução de calor transiente unidirecional............................................ 125
7.2.4 Meio heterogêneo ................................................................................... 134
7.3 Exemplos numéricos: Equação hiperbólica ................................................... 141
7.3.1 Considerações iniciais ............................................................................ 141
7.3.2 Barra homogênea.................................................................................... 144
7.3.3 Meio heterogêneo ................................................................................... 154
8 Conclusões ........................................................................................................... 162
Referências Bibliográficas ......................................................................................... 166
1
1 Introdução
Capítulo 1 Introdução
1.1 Importância dos métodos numéricos
Problemas de engengaria são usualmente descritos por leis físicas que podem ser
matematicamente representadas por equações diferenciais parciais. Essas equações
diferenciais parciais aparecem com grande freqüência em modelos que descrevem
quantitativamente fenômenos em diversas áreas, como por exemplo, mecânica dos
fluidos, mecânica dos sólidos, transferência de calor e massa, vibrações, acústica,
dinâmica, etc. Com o avanço das técnicas computacionais e o rápido desenvolvimento
do processamento de dados e imagens dos computadores, inúmeros esforços vêm sendo
realizados ao longo desses anos para a solução numérica de tais equações diferenciais
parciais aplicadas a situações mais realísticas e complexas.
Uma vez que projetos de engenharia que utilizam a modelagem computacional
vêm se tornando cada vez mais complexos e interdisciplinares, ferramentas
computacionais tornam-se um grande atrativo na substituição de modelos criados em
laboratórios. Isso tem por objetivo reduzir significantemente o custo financeiro
relacionado a ensaios e experimentos de laboratório com a vantagem de ser uma
ferramenta bastante flexível e com um aumento muito pequeno do custo em análises
que precisem ser efetuadas diversas vezes com parâmetros diferentes.
2
Dentre as várias áreas interdisciplinares pode-se destacar aquela envolvendo
modelagem de problemas de engenharia biomédica e biologia computacional. Esta área
vem ganhando grande destaque nos últimos anos principalmente nos países
desenvolvidos, possuindo colaboração entre as escolas de engenharia, ciências exatas e
medicina. O objetivo dessa área é suprir ferramentas computacionais e informações
relevantes para a criação, por exemplo, de novos tratamentos, mecanismos e
equipamentos de diagnósticos. Embora a complexidade da modelagem nessa área seja
enorme com vários parâmetros e equações a serem mais bem representados comparados
ao caso real, grandes avanços vêm sendo alcançados, influenciando profundamente não
somente a área da medicina e áreas correlatas como também áreas da modelagem
computacional e seus grupos de pesquisas.
1.2 Breve revisão bibliográfica
Entre os vários métodos numéricos existentes na literatura, podem-se destacar os
métodos dos elementos finitos (MEF), diferenças finitas (MDF), volumes finitos
(MVF), elementos de contorno (MEC) e mais recentemente os denominados métodos
sem-malha (STEIN et al., 2004; MINKOWYCZ et al., 2006). Embora os métodos das
diferenças finitas, elementos de contorno e até mesmo os métodos sem-malha tenham
aplicações específicas de sucesso, os métodos dos elementos finitos e volumes finitos
são os mais utilizados na prática para a resolução de diferentes problemas de
modelagem computacional. Sua grande utilização na indústria e em projetos de
engenharia tem como causa a sua generalidade, i.e., tais métodos podem ser facilmente
aplicados a geometrias complexas, a meios heterogêneos e a problemas tanto lineares
quanto não-lineares (BATHE, 1996; HUGHES, 2000; ZIENKIEWICZ et al. 2005,
3
EYMARD et al., 2000). Como conseqüência, existe hoje no mercado diferentes pacotes
computacionais baseados no método dos elementos finitos e/ou volumes finitos como,
por exemplo, ABAQUS, ANSYS, SAP, ADINA, etc.
É importante ressaltar que o método das diferenças finitas foi um dos primeiros
métodos numéricos a serem aplicados em problemas mais práticos. Apesar de possuir
limitações quanto a geometrias complexas, sua utilização nos dias atuais ocorre em
nichos específicos como, por exemplo, na geofísica uma vez que seu custo
computacional é bastante reduzido quando comparado a outros métodos numéricos
clássicos. Entretanto, tal cenário vem mudando aos poucos, a medida que métodos
alternativos como os métodos dos elementos finitos espectrais e descontínuos (COHEN,
2002, RIVIERE & WHEELER, 2003) vem ganhando espaço na área da geofísica e de
propagação de ondas.
Apesar do grande sucesso do MEF, em determinados problemas como aqueles
envolvendo domínios infinitos, e.g., problemas do tipo solo-fluido-estrutura, o método
dos elementos de contorno pode se tornar mais vantajoso que o MEF uma vez que
domínios infinitos são facilmente incorporados na formulação do MEC. Mais
especificamente o acoplamento entre os métodos dos elementos finitos e elementos de
contorno é que possui grande interesse por parte dos pesquisadores. Tal interesse se
baseia no fato de que em domínios heterogêneos e com comportamento não-linear o
MEF é empregado, já para domínios infinitos o MEC é eficientemente utilizado (HALL
& OLIVETO, 2003, SOARES, 2004b, SOARES et. al, 2004c).
O método dos elementos de contorno se baseia na utilização de funções de Green
analíticas. Como descrito na literatura (STAKGOLD, 1997; WROBEL, 2002), a
solução de equações diferencias pode ser facilmente resolvida uma vez conhecida a
função de Green para o meio em questão. De fato, funções de Green são uma poderosa
4
ferramenta para solução de diversos problemas, pois a solução de um determinado
problema submetido a diferentes condições de contorno e de volume é facilmente obtida
através de equações ou expressões integrais. O sucesso do método dos elementos de
contorno se baseia no fato que funções de Green de meio infinito (soluções
fundamentais), usualmente utilizadas, existam. Embora o MEC seja geral com respeito
a geometria do problema, certas restrições aparecem quanto ao meio em questão, já que
funções de Green para diferentes tipos de meios, e.g., heterogêneos, anisotrópicos, etc.
não são ainda de total conhecimento (WROBEL, 2002). Embora existam formulações
do MEC que possam ser aplicadas a meios heterogêneos, sua utilização na prática se
mostrou problemática devido as integrais de volume geradas a partir do uso de soluções
fundamentais de meios homogêneos usualmente empregadas (WROBEL, 2002).
Dentre os vários tipos de equações utilizadas para modelagem de diferentes
fenômenos físicos, podemos destacar as equações do tipo parabólica (e.g., transferência
de calor, escoamento em meios porosos, etc.) e hiperbólica (e.g., dinâmica, vibrações,
acústica, etc.) que são estudadas nesta tese (CLOUGH & PENZIEN, 1993; COHEN,
2002; BAEHR & STEPHAN, 2006). Quando o método dos elementos finitos padrão é
aplicado a problemas governados pelas equações parabólicas e hiperbólicas, um sistema
de equações diferenciais ordinárias é obtido (BATHE, 1996; ZIENKIEWICZ et al.,
2005). Embora existam diferentes metodologias para a solução de tal sistema de
equações diferenciais ordinárias, métodos de integração temporal ou de marcha no
tempo são uma poderosa e eficiente ferramenta numérica. Entre os métodos numéricos
de integração temporal (marcha no tempo) mais utilizados se destacam os seguintes
métodos: método-θ , Diferença central, Runge-Kutta, Newmark, Houbolt, Wilson-θ ,
α -generalizado, HHT-α (WOOD, 1990; HUGHES, 2000).
5
Ao longo das últimas décadas novas metodologias de integração temporal vêm
sendo criadas, principalmente para o desenvolvimento de métodos de integração
temporal de ordem superior, já que os métodos mencionados acima são de 10 ou 20
ordem no tempo. ARGYRIS et al. (1973) utilizaram polinômios hermitianos de ordem
2n para aproximar a força inercial, obtendo uma família de algoritmos
incondicionalmente estáveis de ordem variável. Posteriormente FUNG (1996) utilizou
polinômios hermitianos e o método dos resíduos ponderados para obter métodos
incondicionalmente estáveis de terceira e quarta ordem. TARNOW & SIMO (1994)
apresentaram um processo de submarcha para obter métodos de quarta ordem a partir de
métodos de segunda ordem, bastando apenas efetuar três intervalos de tempo
específicos para avançar no tempo. FUNG (1997a, 1999) estabeleceu métodos
incondicionalmente estáveis de ordem variável a partir do método de Newmark e do
método-θ , diferentemente do método de TARNOW & SIMO (1994), o método efetua
processos de submarcha independentes, sendo posteriormente combinados linearmente.
ZHONG & WILLIAMS (1994) apresentaram um método de integração temporal
bastante preciso denominado de “Precise Time Step Integration Method”, onde a
equação diferencial de segunda ordem é transformada para um sistema de equações
diferencias de primeira ordem e resolvida em função de uma matriz exponencial e uma
integral de convolução. O método proposto por ZHONG & WILLIAMS (1994) é mais
bem aplicado em problemas com equações de primeira ordem, e.g., condução de calor,
onde a equação original não precisa ser modificada. Tendo em vista o trabalho de
ZHONG & WILLIAMS (1994), FUNG (1997b) sugeriu uma variação do “Precise Time
Step Integration Method” baseado no cálculo numérico de respostas a uma função
impulso e degrau. Este método tem a vantagem de operar com a equação diferencial de
segunda ordem diretamente sem requerer qualquer tipo de transformação, o que do
6
ponto de vista computacional é bastante vantajoso. Uma revisão bastante extensa sobre
métodos de integração temporal existentes na literatura bem como novas metodologias
pode ser encontrada em detalhes em TAMMA et al. (2000) e STEIN et al. (2004).
Já para o método dos elementos de contorno pode-se destacar metodologias
baseadas tanto na solução fundamental dependente do tempo quanto na solução
fundamental independente do tempo (PARTRIDGE et al., 1996; WROBEL, 2002;
CARRER & MANSUR, 2004; BESKOS, 1997; DOMINGUEZ, 1993). Na primeira, a
solução é efetuada no domínio espaço-tempo através de um processo convolutivo ou de
marcha no tempo; os denominados métodos TD-BEM (“time-domain boundary element
method”), já na segunda e similarmente ao método dos elementos finitos um sistema de
equações diferenciais ordinárias é obtido; os denominados métodos DR-BEM (“Dual
Reciprocity boundary element method”) e D-BEM (“Domain boundary element
method”).
Com a finalidade de resolver problemas dependentes do tempo, o grupo de
pesquisa do orientador vem desenvolvendo novas metodologias para sua resolução.
Entre as várias metodologias, pode-se citar o método da aproximação implícita de
Green ImGA (“Implicit Green’s Approach”) proposto por SOARES & MANSUR
(2004a) que estabeleceram novos algoritmos de integração temporal baseados no
cálculo numérico e implícito da função de Green através do método de Newmark para a
equação hiperbólica e o método da aproximação explícita de Green ExGA (“Explicit
Green’s Approach”) proposto por LOUREIRO (2006, 2007) e MANSUR et al. (2007)
baseados no cálculo numérico e explícito da função de Green. O método ImGA foi
aplicado em diferentes tipos de problemas utilizando-se diferentes métodos numéricos
como mostrado nos artigos de SOARES (2007a) e SOARES et. al (2007b, 2009). Já
para o método ExGA, o mesmo se mostrou bastante promissor e atingiu resultados
7
bastante precisos especialmente quando comparado aos métodos tradicionais de marcha
no tempo (LOUREIRO, 2007). Posteriormente, tal método foi estendido a problemas
transientes de condução de calor por MANSUR et al. (2009), VASCONCELLOS
(2008), LOUREIRO et al. (2009a), LOUREIRO & MANSUR (2009b) utilizando o
FEM e por ZAMBROZUSKI (2010) utilizando o MEC para o cálculo da função de
Green.
Os conceitos iniciais do método ExGA foram inspirados no método TD-BEM
(WROBEL, 1981; MANSUR & BREBBIA; 1982; MANSUR, 1983), mas
diferentemente deste, funções de Green que satisfazem as condições de contorno
homogêneas são utilizadas. Como a função de Green para um domínio finito qualquer
que satisfaz as condições homogêneas de contorno são muito difíceis se não impossíveis
de se obterem analiticamente, o método ExGA se baseia em funções de Green
numéricas computadas, por exemplo, pelo método dos elementos finitos. Desta maneira
o método ExGA torna-se bastante geral no sentido que qualquer geometria e meio (e.g.,
heterogêneos, anisotrópicos, poroelásticos, viscoelásticos, etc.) podem ser facilmente
levado em consideração na modelagem do problema em questão. Entretanto, para tal
generalização, o domínio do problema a ser resolvido precisa ser discretizado em
elementos.
O método ExGA vem sendo aplicado com bastante êxito em problemas de
condução de calor, dinâmica e propagação de ondas como descrito nos artigos
científicos e de congresso do autor (MANSUR et al. 2007; LOUREIRO & MANSUR
2009b-d,g; LOUREIRO et al. 2009a,e-f; LOUREIRO & MANSUR, 2010; OYARZUN
et al., 2011). Em tais trabalhos a função de Green numérica ou mais especificamente a
matriz de Green do problema discreto é computada através de métodos clássicos de
integração temporal, como por exemplo, Newmark, Diferença Central, Runge-Kutta ou

8
através de metodologias híbridas onde a função de Green é computada no domínio
transformado de Laplace.
1.3 Motivação, objetivos e organização da tese
Metodologias numéricas alternativas para a solução de problemas envolvendo
equações do tipo parabólica e, principalmente, hiperbólica vêm ganhando grande
interesse por partes dos pesquisadores, uma vez que tais equações aparecem com
freqüência em modelagens numéricas com aplicações, e.g., na indústria do petróleo e
gás, na área de (bio)-transferência de calor, etc., e em muitos casos formulações
existentes não se aplicam de forma satisfatória. Portanto, a presente tese tem como
objetivo desenvolver e implementar novas técnicas numéricas para análise de problemas
lineares governados pelas equações parabólicas e hiperbólicas. Motivado pelo sucesso
do método da aproximação explícita de Green ExGA (“Explicit Green’s Approach”)
desenvolvido por LOUREIRO (2006, 2007) e MANSUR et al. (2007) resultando em
inúmeras publicações, uma generalização do método ExGA com conceitos matemáticos
importantes é explorada e apresentada de forma detalhada. O método dos elementos
finitos, largamente utilizado para a solução de problemas de modelagem computacional,
é utilizado como ferramenta numérica para a discretização espacial no método ExGA.
Os desenvolvimentos relativos a essas novas técnicas numéricas baseadas no cálculo
numérico da função de Green são aplicados na solução de problemas de transferência de
calor e em problemas de propagação de ondas.
Tendo em vista a proposta da tese, o texto está organizado em 7 capítulos. No
capítulo 2, são apresentadas as equações governantes para problemas transientes de
condução de calor bem como sua respectiva função de Green. Além disso, o

9
desenvolvimento detalhado do método ExGA aplicando-se resíduos ponderados no
domínio espaço-tempo é também apresentado. No capítulo 3, é apresentado o cálculo
numérico da função de Green no domínio temporal através do método-θ bem como um
procedimento de subpassos de tempo constantes e não-constantes visando um aumento
da precisão no método ExGA. A aproximação da convolução e também uma
metodologia alternativa baseada na solução particular para a incorporação das forças
externas na solução são também apresentadas e discutidas no capítulo 3. O capítulo 4
tem por objetivo validar as propostas referentes aos subpassos de tempo realizando uma
análise de estabilidade e acurácia para a equação parabólica.
Já no capítulo 5, o método ExGA é aplicado à equação hiperbólica e tanto o
desenvolvimento quanto expressões integrais alternativas para o método ExGA são
apresentados de forma detalhada. O capítulo 6 apresenta uma variação do método
ExGA denominada método da aproximação explícita de Green local (LExGA-“Local
Explicit Green's Approach”) baseado no princípio da causalidade da equação
hiperbólica e tem como diferencial o cálculo numérico da função de Green localmente
através de subdomínios. O tamanho desses subdomínios com suas respectivas
submalhas são calculados através de uma metodologia baseada na conservação da
energia uma vez que o princípio da causalidade não pode ser aplicado. Finalmente,
resultados numéricos são apresentados e discutidos no capítulo 7 com o objetivo de
mostrar as potencialidades bem como validar a metodologia proposta através da
comparação com métodos tradicionais.

10
2 Método da Aproximação Explícita de Green para Problemas Transientes de Condução de Calor: Equação Parabólica
Capítulo 2 Método da Aproximação Explícita de Green para Problemas Transientes de Condução de Calor: Equação Parabólica 2.1 Introdução
Neste capítulo são apresentadas as equações governantes para problemas
transientes de condução de calor e para a função de Green do problema em
consideração. Na seqüência, os procedimentos matemáticos necessários para a obtenção
da expressão integral do método da aproximação explícita de Green para a solução da
equação parabólica de condução de calor são detalhadamente apresentados.
2.2 Equações governantes
Seja dΩ⊂ um domínio finito aberto qualquer com contorno Γ = ∂Ω do tipo
Lipschitz, onde d representa o número de dimensões do problema e seja
(0, fI t +⎤= ⊂⎦ o tempo da análise (domínio temporal), a equação diferencial parcial
que descreve problemas de condução de calor em regime transiente é expressa por
(CARSLAW & JAEGER, 1959, ÖZIŞIK, 1993, SELVADURAI, 2000):

11
( )( ) ( ) ( ), , ,k T t b t cT tρ∇⋅ ∇ + =x x x , ( ), t I∈Ω×x (2.1)
onde d∇∈ representa o operador gradiente, :T IΩ× → o campo de temperatura,
( ) ( ),,
T tT t
t∂
=∂x
x a derivada parcial da temperatura em relação ao tempo e
:b IΩ× → possíveis fontes de domínio. As propriedades relacionadas ao material
são: ( )k k= x com :k +Ω→ a condutividade térmica (note que em um caso geral a
condutividade é representada por um tensor simétrico e positivo definido de 2º ordem,
i.e., : d d×Ω→k ), ( )c c= x com :c +Ω→ a capacitância e ( )ρ ρ= x com
:ρ +Ω→ a densidade. Adicionalmente à Eq. (2.1), em um problema direto,
condições de contorno e condição inicial precisam ser prescritas para se constituir de
forma completa um problema de valor inicial e de contorno. As condições de contorno
consideradas são do tipo Dirichlet e Neumman dadas por
( ) ( ), ,T t T t=x x , ( ) 1, t I∈Γ ×x (2.2) ( ) ( ), ,k T t q t∇ ⋅ =x n x , ( ) 2, t I∈Γ ×x (2.3)
e condição inicial representada como
( ) ( )0,0T T=x x , ∈Ωx , 0t = (2.4)
onde 1Γ e 2Γ são partições de Γ tal que 1 2Γ = Γ Γ∪ e 1 2Γ Γ =∅∩ , 1:T IΓ × → e
2:q IΓ × → são os valores prescritos de temperatura e fluxo ao longo do contorno de

12
normal externa representada pelo vetor n e 0 :T Ω→ a função prescrita relativa a
condição inicial. Em algumas aplicações é usual prescrever a condição de contorno de
Robin (ou convecção) dada por ( ) ( ) ( )( ), , ,c ck T t h T t T t∇ ⋅ = −x n x x , onde :ch +Γ →
e :cT IΓ× → são, respectivamente, o coeficiente de convecção e a temperatura do
meio que cerca tal contorno. Embora, a condição de contorno de convecção não seja
explorada nesta tese, sua inclusão na formulação apresentada aqui é bastante simples,
bastando apenas substituir ( ),q tx em (2.3) por ( ) ( )( ), ,c ch T t T t−x x (LOUREIRO et
al., 2009a).
Como a solução do campo de temperatura ( ),T tx efetuada pelo método da
aproximação explícita de Green se baseia na utilização de funções de Green, torna-se
importante definir as características da função de Green utilizada. Como descrito na
literatura (STAKGOLD, 1979, BECK et al., 1992, ÖZIŞIK, 1993, WROBEL, 2002), a
função de Green pode ser interpretada como sendo a resposta devido a uma fonte
pontual instantânea aplicada em uma determinada posição y e em um certo instante de
tempo τ , i.e., matematicamente representado por ( ) ( ) ( ),b t tδ δ τ= − −x x y , onde ( )δ ⋅
representa a função generalizada delta de Dirac definida como (denominada apenas de
função delta de Dirac deste ponto em diante):
( )
( )
0,
1D
d
δ
δ
− = ≠
− =∫
ξ A ξ A
ξ A ξ
(2.5)
sendo D um domínio qualquer (espacial ou temporal) e D∈A com , n∈ξ A
variáveis genéricas. A função delta de Dirac possui a seguinte propriedade:

13
( ) ( ) ( ) ,0 ,
D
f Df d
Dδ
∈⎧⎪− = ⎨∉⎪⎩∫ A A
ξ A ξ ξA
(2.6)
supondo que ( )f ξ seja uma função contínua em =ξ A .
Uma questão crucial para se inicializar uma metodologia baseada em funções de
Green corresponde a escolha de uma função de Green para o problema, e.g., funções de
Green de meio infinito (solução fundamental), semi-infinito, etc.. No método da
aproximação explícita de Green, considera-se a função de Green no mesmo domínio
fechado Ω = Ω Γ∪ e com as mesmas propriedades físicas do problema original a ser
resolvido dado pelas Eqs. (2.1)-(2.4), mas com condições de contorno homogêneas.
Desta forma a equação e suas condições de contorno são descritas por:
( )( ) ( ) ( ) ( ), , , ,k G t t cG tτ δ δ τ ρ τ∇ ⋅ ∇ − + − − = −x y x y x y , ∈Ωx , t τ> (2.7) ( ), , 0G t τ− =x y , 1∈Γx , t τ> (2.8) ( ), , 0k G t τ∇ − ⋅ =x y n , 2∈Γx , t τ> (2.9)
A função de Green possui as seguintes propriedades (STAKGOLD, 1979, BECK
et al., 1992):
1- Relação temporal:
( ) ( ), ; , , ,G t G tτ τ= −x y x y (2.10)
2- Reciprocidade:
( ) ( ), , , ,G t G tτ τ− = −x y y x (2.11)
3- Causalidade

14
( ), , 0G t τ− =x y , t τ< (2.12)
A primeira propriedade (2.10) indica que a função de Green depende de t e τ
somente através da diferença t τ− (observe que a notação de (2.10) lado esquerdo é
largamente utilizada por alguns pesquisadores). Portanto, adotando-se, por exemplo,
uma translação temporal onde t é substituído por 1t t+ e τ por 1tτ + , a função de
Green torna-se invariante a tal translação uma vez que ( )1 1t t t tτ τ+ − + = − . A segunda
propriedade indica que a função de Green em um determinado ponto x (ponto campo)
devido a uma fonte pontual em y (ponto fonte) é igual a função de Green em um
determinado ponto y devido a uma fonte pontual em x independentemente da posição
desses pontos ao contorno ou domínio, sendo válido sempre que o operador diferencial
da equação em questão for auto-adjunto (STAKGOLD, 1979). Finalmente, a terceira
propriedade indica que para uma determinada fonte pontual instantânea em um instante
qualquer τ , a função de Green é zero para tempos anteriores a τ .
Alternativamente, a função de Green pode ser determinada a partir da equação
homogênea através de uma condição inicial pontual aplicada em uma determinada
posição y , i.e. (STAKGOLD, 1979, BECK et al., 1992):
( )( ) ( ), , , ,k G t cG tτ ρ τ∇ ⋅ ∇ − = −x y x y , ∈Ωx , t τ> (2.13) ( ), , 0G t τ− =x y , 1∈Γx , t τ> (2.14) ( ), , 0k G t τ∇ − ⋅ =x y n , 2∈Γx , t τ> (2.15)
( ) ( )1, ,G tc
τ δρ
− = −x y x y , ∈Ωx , t τ= (2.16)

15
De fato tal equivalência pode ser obtida, por exemplo, aplicando-se a
transformada de Laplace em relação à t τ− tanto na Eq. (2.7) quanto na Eq. (2.13) e
observando que a mesma expressão é obtida no domínio transformado (para maiores
detalhes sobre transformada de Laplace e suas propriedades a referência SCHIFF (1999)
é indicada). Logo, pode-se concluir que ambas as interpretações geram a mesma função
de Green para t τ> . A escolha das Eqs. (2.7)-(2.9) ou das Eqs. (2.13)-(2.16) como
ponto de partida para se calcular a função de Green depende da metodologia matemática
(ou numérica) a ser utilizada.
2.3 Expressão integral do método da aproximação Explícita de Green
A presente seção tem por objetivo derivar de maneira geral a expressão integral
do método da aproximação explícita de Green aplicando-se o método dos resíduos
ponderados simultaneamente no espaço e no tempo e utilizando conceitos tanto do
método dos elementos de contorno quanto do método dos elementos finitos como
descrito em LOUREIRO et al. (2009a).
2.3.1 Formulação pelo método dos resíduos ponderados
Antes de aplicar a sentença de resíduos ponderados, a transformação dada por
( ) ( ) ( )ˆ, , ,T t T t T t= +x x x tal que ( ) ( )ˆ , ,T t T t=x x em 1Γ é utilizada. Essa
transformação tem por objetivo satisfazer a condição de contorno de Dirichlet de forma
exata e também evitar o cálculo da derivada da função de Green no contorno 1Γ como
ficará mais claro no decorrer desta seção. Portanto, o problema de valor inicial e de
contorno dado pelas Eqs. (2.1)-(2.4) é reescrito como:

16
( )( ) ( ) ( ) ( ), , , ,k T t b t t cT tψ ρ∇⋅ ∇ + + =x x x x , ( ), t I∈Ω×x (2.17) ( ), 0T t =x , ( ) 1, t I∈Γ ×x (2.18) ( ) ( )( ) ( )ˆ, , ,k T t T t q t∇ + ⋅ =x x n x , ( ) 2, t I∈Γ ×x (2.19)
( ) ( ) ( )0
ˆ,0 ,0T T T= −x x x , ∈Ωx , 0t = (2.20)
onde ( ) ( )( ) ( )ˆ ˆ, , ,t k T t cT tψ ρ= ∇⋅ ∇ −x x x pode ser interpretado como sendo uma nova
fonte responsável pela introdução da condição de Dirichlet.
Aplicando o método dos resíduos ponderados simultaneamente no domínio
espaço-tempo, ou seja, em Ω e em um intervalo de tempo qualquer ( 0 ,t t+ ⎤⎦ e adotando
a função de Green solução das Eqs. (2.7)-(2.9) como sendo a função de ponderação, a
seguinte sentença integral é obtida:
( ) ( )( ) ( ) ( ) ( )
0
,, , , , , 0
t
t
TG t k T b c d d
ττ τ τ ψ τ ρ τ
τ
+
Ω
⎛ ⎞∂− ∇ ⋅ ∇ + + − Ω =⎜ ⎟⎜ ⎟∂⎝ ⎠∫∫ y
yx y y y y
(2.21)
onde t t ε+ = + (sendo ε um número positivo arbitrariamente pequeno) é utilizado para
evitar que o limite superior da integral coincida com o pico da função delta de Dirac.
Levando em consideração as condições de contorno homogêneas (2.8)-(2.9) da
função de Green bem como a condição homogênea (2.18), aplica-se o teorema da
divergência duas vezes no primeiro termo e uma vez no primeiro termo relacionado a
( ),ψ τy da Eq. (2.21) ambos envolvendo o operador gradiente. Posteriormente
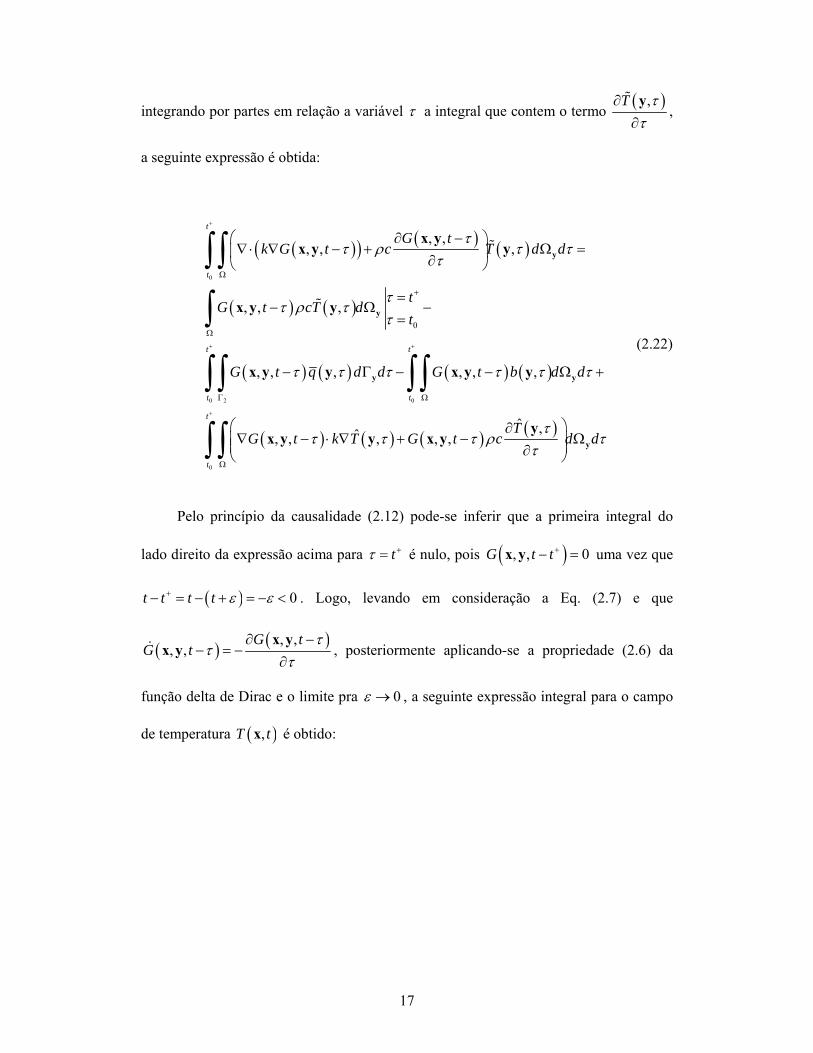
17
integrando por partes em relação a variável τ a integral que contem o termo ( ),T ττ
∂∂y
,
a seguinte expressão é obtida:
( )( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
0
0 2 0
0
0
, ,, , ,
, , ,
, , , , , ,
ˆ ,ˆ, , , , ,
t
t
t t
t t
t
t
G tk G t c T d d
tG t cT d
t
G t q d d G t b d d
TG t k T G t c d d
ττ ρ τ τ
τ
ττ ρ τ
τ
τ τ τ τ τ τ
ττ τ τ ρ τ
τ
+
+ +
+
Ω
+
Ω
Γ Ω
Ω
∂ −⎛ ⎞∇ ⋅ ∇ − + Ω =⎜ ⎟∂⎝ ⎠
=− Ω −
=
− Γ − − Ω +
⎛ ⎞∂∇ − ⋅ ∇ + − Ω⎜ ⎟⎜ ⎟∂⎝ ⎠
∫∫
∫
∫∫ ∫∫
∫∫
y
y
y y
y
x yx y y
x y y
x y y x y y
yx y y x y
(2.22)
Pelo princípio da causalidade (2.12) pode-se inferir que a primeira integral do
lado direito da expressão acima para tτ += é nulo, pois ( ), , 0G t t+− =x y uma vez que
( ) 0t t t t ε ε+− = − + = − < . Logo, levando em consideração a Eq. (2.7) e que
( ) ( ), ,, ,
G tG t
ττ
τ∂ −
− = −∂
x yx y , posteriormente aplicando-se a propriedade (2.6) da
função delta de Dirac e o limite pra 0ε → , a seguinte expressão integral para o campo
de temperatura ( ),T tx é obtido:
18
( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) (
0 2
0
0
0
0 0
2 0
, , , ,
, , ,
, , ,
ˆ, , ,
ˆ ,, , , , ,
t
t
t
t
t
t
t
f
t
T t G t t cT t d
G t q d d
G t b d d
G t k T d d
TG t c d d t t t
ρ
τ τ τ
τ τ τ
τ τ τ
ττ ρ τ
τ
Ω
Γ
Ω
Ω
Ω
= − Ω +
− Γ +
− Ω −
∇ − ⋅ ∇ Ω −
∂⎤− Ω ∈Ω Γ × ⎦∂
∫
∫∫
∫∫
∫∫
∫∫
y
y
y
y
y
x x y y
x y y
x y y
x y y
yx y x ∪
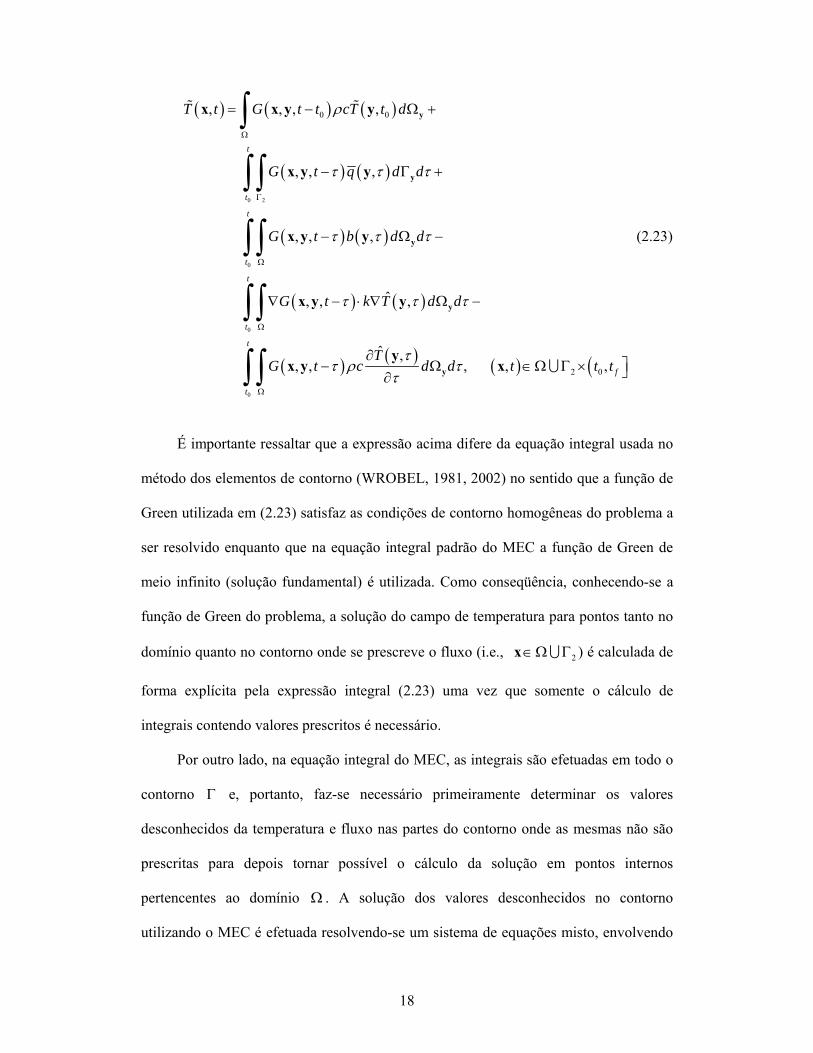
(2.23)
É importante ressaltar que a expressão acima difere da equação integral usada no
método dos elementos de contorno (WROBEL, 1981, 2002) no sentido que a função de
Green utilizada em (2.23) satisfaz as condições de contorno homogêneas do problema a
ser resolvido enquanto que na equação integral padrão do MEC a função de Green de
meio infinito (solução fundamental) é utilizada. Como conseqüência, conhecendo-se a
função de Green do problema, a solução do campo de temperatura para pontos tanto no
domínio quanto no contorno onde se prescreve o fluxo (i.e., 2∈Ω Γx ∪ ) é calculada de
forma explícita pela expressão integral (2.23) uma vez que somente o cálculo de
integrais contendo valores prescritos é necessário.
Por outro lado, na equação integral do MEC, as integrais são efetuadas em todo o
contorno Γ e, portanto, faz-se necessário primeiramente determinar os valores
desconhecidos da temperatura e fluxo nas partes do contorno onde as mesmas não são
prescritas para depois tornar possível o cálculo da solução em pontos internos
pertencentes ao domínio Ω . A solução dos valores desconhecidos no contorno
utilizando o MEC é efetuada resolvendo-se um sistema de equações misto, envolvendo

19
tanto a temperatura quanto o fluxo, obtido depois de realizado a discretização tanto no
espaço quanto no tempo (WROBEL, 1981, 2002).
2.3.2 Discretização espacial e temporal
Como descrito anteriormente a solução do campo de temperatura ( ),T tx depende
do conhecimento prévio da função de Green do problema em consideração. Como
funções de Green que satisfazem as condições de contorno homogêneas são
extremamente difíceis, se não impossíveis, de se encontrarem de forma analítica em um
caso geral, funções de Green numéricas computadas pelo MEF (tópico do próximo
capítulo) são utilizadas no método da aproximação Explícita de Green. Portanto, a
expressão integral (2.23) é discretizada utilizando conceitos de elementos finitos
(BATHE, 1996, HUGHES, 2000).
Para tal, o primeiro passo consiste em dividir o domínio Ω = Ω Γ∪ em
elementos, ou seja, 1 1
nel nelh e e e
e e= =Ω = Ω = Ω = Ω Γ∪ ∪ ∪ tal que m n
m n∀ ≠Ω Ω =∅∩ , onde eΩ , eΓ
representam, respectivamente, o domínio e o contorno do elemento e nel o número
total de elementos. Posteriormente, faz-se necessário distinguir os pontos nodais
pertencentes ao contorno discreto 1hΓ onde a temperatura é conhecida dos demais
pontos pertencentes ao domínio discreto 1h hΩ −Γ onde as temperaturas são incógnitas
(i.e., o número de equações eqn ). Portanto, seja { }1, 2, , npnη = … o conjunto de todos os
pontos nodais em hΩ e seja 1
η ηΓ ⊂ o subconjunto correspondente aos pontos nodais
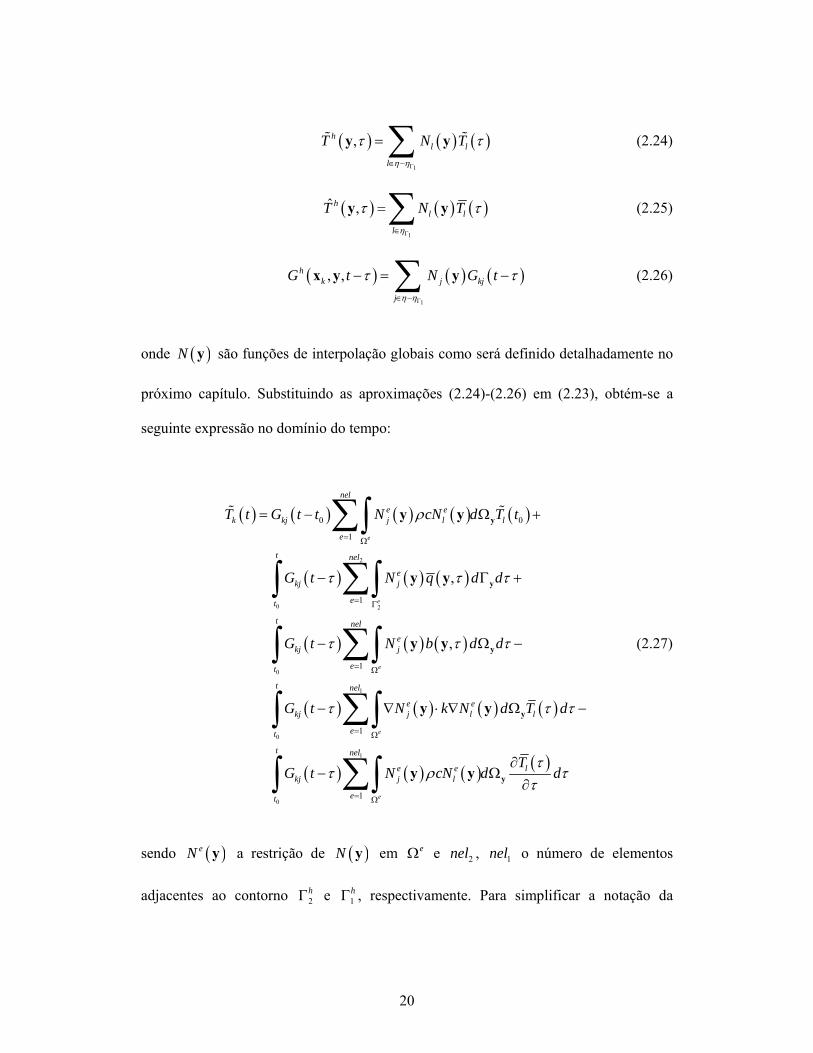
pertencentes a 1hΓ , as aproximações para a temperatura e para a função de Green
utilizando funções linearmente independentes podem ser escritas como:
20
( ) ( ) ( )1
,hl l
l
T N Tη η
τ τΓ∈ −
= ∑y y (2.24)
( ) ( ) ( )1
ˆ ,hl l
l
T N Tη
τ τΓ∈
=∑y y (2.25)
( ) ( ) ( )1
, ,hk j kj
j
G t N G tη η
τ τΓ∈ −
− = −∑x y y (2.26)
onde ( )N y são funções de interpolação globais como será definido detalhadamente no
próximo capítulo. Substituindo as aproximações (2.24)-(2.26) em (2.23), obtém-se a
seguinte expressão no domínio do tempo:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
0 2
0
1
0
1
0
0 0
1
1
1
1
1
,
,
e
e
e
e
e
nel
e ek kj j l l
e
t nel
ekj j
et
t nel
ekj j
et
t nel
e ekj j l l
et
t nel
le ekj j l
et
T t G t t N cN d T t
G t N q d d
G t N b d d
G t N k N d T d
TG t N cN d d
ρ
τ τ τ
τ τ τ
τ τ τ
ττ ρ τ
τ
= Ω
= Γ
= Ω
= Ω
= Ω
= − Ω +
− Γ +
− Ω −
− ∇ ⋅ ∇ Ω −
∂− Ω
∂
∑∫
∑∫ ∫
∑∫ ∫
∑∫ ∫
∑∫ ∫
y
y
y
y
y
y y
y y
y y
y y
y y
(2.27)
sendo ( )eN y a restrição de ( )N y em eΩ e 2nel , 1nel o número de elementos
adjacentes ao contorno 2hΓ e 1
hΓ , respectivamente. Para simplificar a notação da
21
expressão integral (2.27) excluindo os somatórios das Eqs. (2.24)-(2.26), notação
indicial é utilizada.
Na expressão acima ( )lT τ são os valores nodais prescritos no contorno 1hΓ , ( )kT t
os valores nodais incógnitas a serem calculados e ( ) ( ), ,kj k jG t G tτ τ− ≡ −x y os valores
nodais para a função de Green. O índice 1
k η ηΓ∈ − da função de Green está relacionado
ao ponto campo kx enquanto j ao ponto fonte jy , ambos sendo pontos nodais da
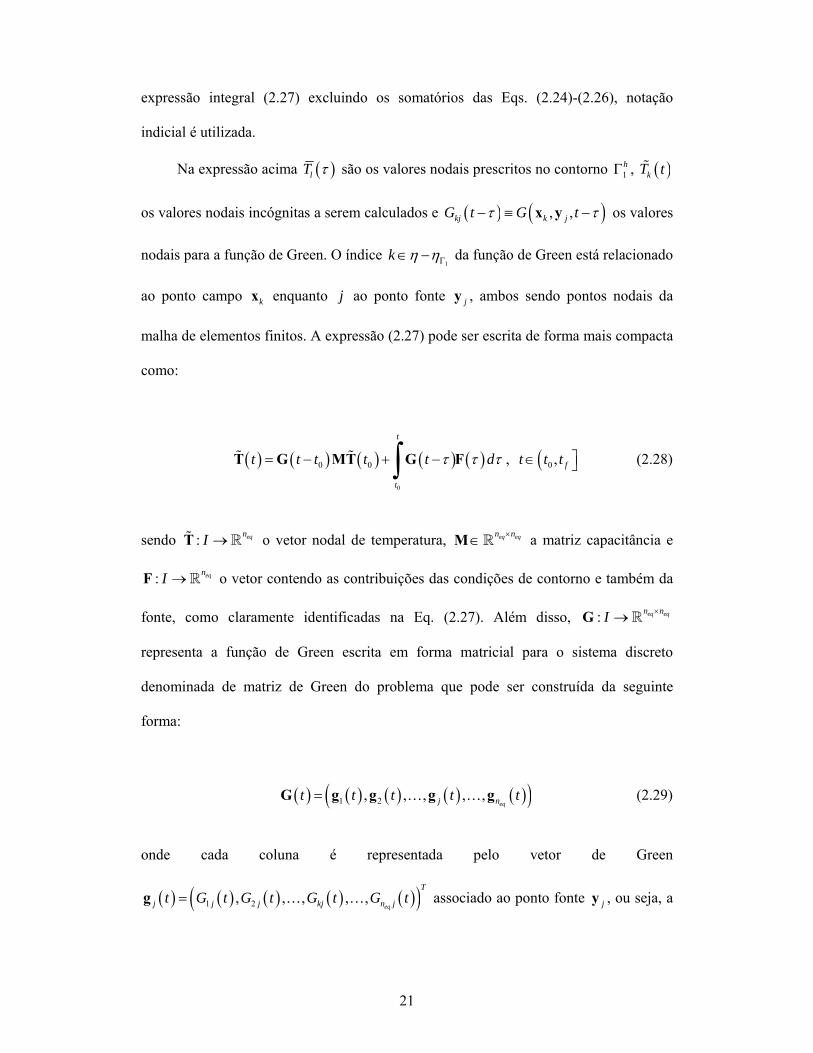
malha de elementos finitos. A expressão (2.27) pode ser escrita de forma mais compacta
como:
( ) ( ) ( ) ( ) ( )0
0 0
t
t
t t t t t dτ τ τ= − + −∫T G MT G F , ( 0 , ft t t ⎤∈ ⎦ (2.28)
sendo : eqnI →T o vetor nodal de temperatura, eq eqn n×∈M a matriz capacitância e
: eqnI →F o vetor contendo as contribuições das condições de contorno e também da
fonte, como claramente identificadas na Eq. (2.27). Além disso, : eq eqn nI ×→G
representa a função de Green escrita em forma matricial para o sistema discreto
denominada de matriz de Green do problema que pode ser construída da seguinte
forma:
( ) ( ) ( ) ( ) ( )( )1 2, , , , ,eqj nt t t t t=G g g g g… … (2.29)
onde cada coluna é representada pelo vetor de Green
( ) ( ) ( ) ( ) ( )( )1 2, , , , ,eq
T
j j j kj n jt G t G t G t G t=g … … associado ao ponto fonte jy , ou seja, a
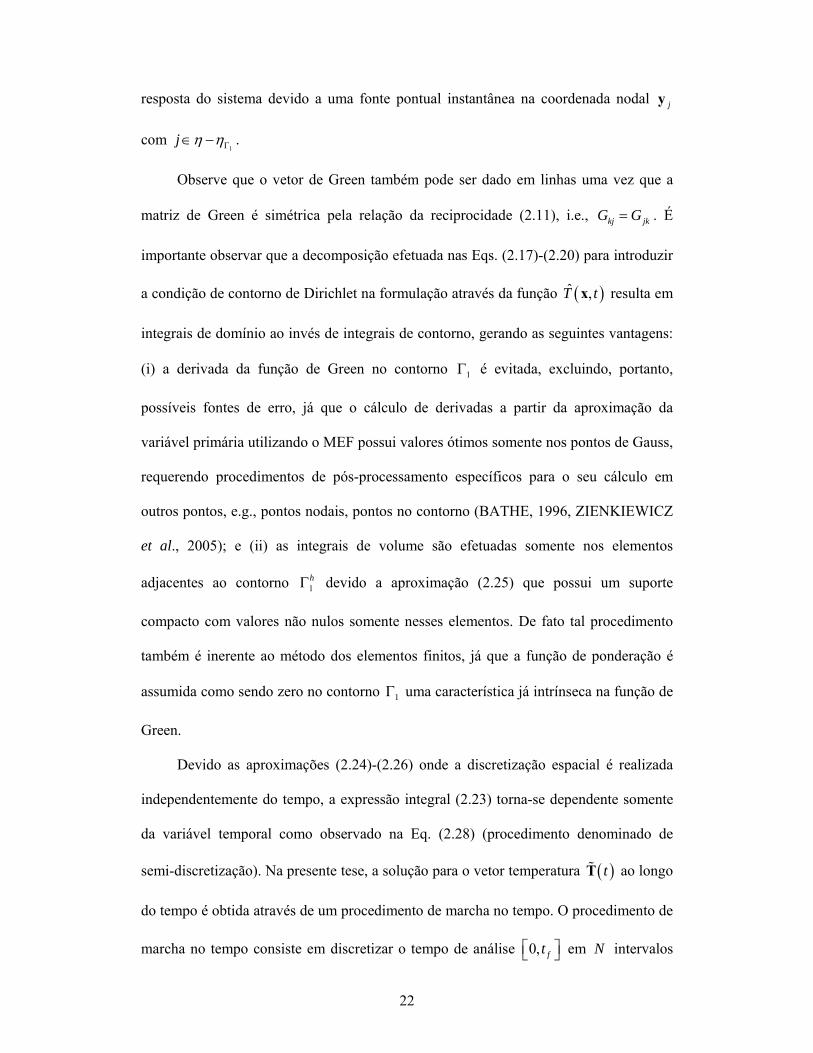
22
resposta do sistema devido a uma fonte pontual instantânea na coordenada nodal jy
com 1
j η ηΓ∈ − .
Observe que o vetor de Green também pode ser dado em linhas uma vez que a
matriz de Green é simétrica pela relação da reciprocidade (2.11), i.e., kj jkG G= . É
importante observar que a decomposição efetuada nas Eqs. (2.17)-(2.20) para introduzir
a condição de contorno de Dirichlet na formulação através da função ( )ˆ ,T tx resulta em
integrais de domínio ao invés de integrais de contorno, gerando as seguintes vantagens:
(i) a derivada da função de Green no contorno 1Γ é evitada, excluindo, portanto,
possíveis fontes de erro, já que o cálculo de derivadas a partir da aproximação da
variável primária utilizando o MEF possui valores ótimos somente nos pontos de Gauss,
requerendo procedimentos de pós-processamento específicos para o seu cálculo em
outros pontos, e.g., pontos nodais, pontos no contorno (BATHE, 1996, ZIENKIEWICZ
et al., 2005); e (ii) as integrais de volume são efetuadas somente nos elementos
adjacentes ao contorno 1hΓ devido a aproximação (2.25) que possui um suporte
compacto com valores não nulos somente nesses elementos. De fato tal procedimento
também é inerente ao método dos elementos finitos, já que a função de ponderação é
assumida como sendo zero no contorno 1Γ uma característica já intrínseca na função de
Green.
Devido as aproximações (2.24)-(2.26) onde a discretização espacial é realizada
independentemente do tempo, a expressão integral (2.23) torna-se dependente somente
da variável temporal como observado na Eq. (2.28) (procedimento denominado de
semi-discretização). Na presente tese, a solução para o vetor temperatura ( )tT ao longo
do tempo é obtida através de um procedimento de marcha no tempo. O procedimento de
marcha no tempo consiste em discretizar o tempo de análise 0, ft⎡ ⎤⎣ ⎦ em N intervalos

23
menores de tempos igualmente espaçados, i.e., [ ]1
10
0, ,N
f k kk
t t t−
+=
⎡ ⎤ =⎣ ⎦ ∪ com
0 10 N ft t t t= < < < =… , 1 /k k ft t t t N+Δ = − = , kt k t= Δ e ( )1 1kt k t+ = + Δ tal que a
solução no instante de tempo 1kt + é calculada a partir da solução conhecida no passo de
tempo anterior kt . Desta forma assumindo 0 kt t= e 1kt t += na Eq. (2.28), a seguinte
expressão recursiva é obtida:
( ) ( ) ( )1
0
t
k kkt t t dτ τ τ
Δ
+ = Δ + Δ − +∫T G MT G F (2.30)
Com o objetivo de simplificar a notação, os sobrescritos 1k + e k no vetor
temperatura na expressão acima representam as soluções nos instantes de tempo 1kt + e
kt , respectivamente, i.e., ( )11
kkt
++≡T T e ( )k
kt≡T T . O processo de marcha no tempo
(2.30) possui as seguintes vantagens: (i) a matriz de Green é calculada somente no
primeiro instante de tempo, já que ( ) ( )1k kt t t+ − = ΔG G ; e (ii) a integral de convolução
precisa ser calculada somente no primeiro intervalo de tempo [ ]0, tΔ , observando que
( ) ( ) ( ) ( )1
1
0
k
k
t t
k k
t
t d t t dτ τ τ τ τ τ+ Δ
+ − = Δ − +∫ ∫G F G F .

24
3 Cálculo Numérico da Função de Green e o Conceito de Subpassos de Tempo
Capítulo 3 Cálculo Numérico da Função de Green e o Conceito de Subpassos de Tempo 3.1 Introdução
O presente capítulo tem por objetivo mostrar os procedimentos numéricos
necessários para se computar a função de Green. A função de Green é calculada
numericamente utilizando-se primeiramente o MEF na discterização espacial em um
procedimento denominado de semi-discretização, resultando em um sistema de
equações diferenciais ordinárias de primeira ordem. Posteriormente, a solução no
domínio do tempo é efetuada empregando o método-θ de marcha no tempo para
resolver o sistema de equações ordinárias de primeira ordem. Com a finalidade de se
criar um algoritmo geral com precisão variável no domínio do tempo, procedimentos de
subpassos de tempo para se computar a função de Green no primeiro instante de tempo
são propostos. Finalmente, uma matriz modificada denominada de matriz de Green
modificada (ou função de Green modificada) e discussões sobre a implementação
numérica da integral de convolução indicada na expressão (2.30) bem como uma
metodologia alternativa que substitui a mesma por uma solução particular são
apresentadas.

25
3.2 Discretização espacial pelo método dos elementos finitos
Na presente tese a função de Green é obtida a partir das Eqs. (2.13)-(2.16) para
0τ = ao invés das Eqs. (2.7)-(2.9) com o objetivo de evitar o cálculo de respostas à
função delta de Dirac com relação ao tempo. Embora ambas as equações resultem na
mesma função de Green do ponto de vista matemático, a metodologia numérica
apresentada aqui é mais facilmente aplicada as Eqs. (2.13)-(2.16) como será esclarecido
no decorrer deste capítulo. Para se inicializar a aproximação por elementos finitos, a
equação variacional do problema precisa ser obtida. Antes, porém, é importante definir
os seguintes espaços das funções admissíveis (HUGHES, 2000):
( ){ }
( ){ }
11
11
: ; 0 em
: ; 0 em
tS G I G H G I
V w w H w
= Ω× → ∈ Ω = Γ ×
= Ω→ ∈ Ω = Γ
y y y
(3.1)
onde tS e V representam os espaços relacionados a função de Green e a função de
ponderação ( )w x , respectivamente (note que o primeiro é dependente do tempo,
enquanto que o segundo é independente do tempo, já que somente a variável espacial
será discretizada pelo MEF) e ( )1H Ω denota o espaço Sobolev de primeira ordem
definido para uma função ( )f x qualquer como (ADAMS & JOHN, 2003):

26
( ) ( ) ( )
( )
1 2 2
22
: | , 1, , ,
: |
i
fH f f L L i dx
L f f dΩ
⎧ ⎫∂Ω = Ω→ ∈ Ω ∈ Ω =⎨ ⎬∂⎩ ⎭
⎧ ⎫⎪ ⎪Ω = Ω→ Ω < ∞⎨ ⎬⎪ ⎪⎩ ⎭
∫
…
(3.2)
A equação variacional (ou forma fraca) associada ao problema de valor inicial e
de contorno dado pelas Eqs. (2.13)-(2.16) pode ser obtida a partir do método dos
resíduos ponderados (ZIENKIEWICZ et al., 2005). Para tal, multiplica-se a Eq. (2.13) e
a condição inicial (2.16) pela função de ponderação ( )w x , posteriormente aplica-se o
teorema da divergência no termo envolvendo o operador gradiente. Depois de efetuados
esses procedimentos, a equação variacional pode ser definida como: para 0t ≥
encontrar ( ), , tG t S∈x y tal que para todas as funções de ponderação ( )w V∈x , tem-se:
( ) ( ) ( ) ( ), , , , 0w cG t d w k G t dρΩ Ω
Ω + ∇ ⋅ ∇ Ω =∫ ∫x xx x y x x y (3.3)
( ) ( ) ( ) ( ), ,0w cG d w dρ δΩ Ω
Ω = − Ω∫ ∫x xx x y x x y (3.4)
Utilizando a propriedade da função delta de Dirac (2.6) no lado direito da Eq.
(3.4), obtem-se:
( ) ( ) ( )w d wδΩ
− Ω =∫ xx x y y (3.5)
Observe que a função delta de Dirac é tratada no sentido distribucional pela
equação variacional; portanto, como será descrito mais adiante a função de Green

27
resultante não possui nenhuma singularidade quando =x y e 0t = , sendo ( )w x uma
função contínua.
Tendo em vista o procedimento de discretização do domínio em elementos
apresentado no capítulo anterior, a aproximação de Galerkin consiste em restringir o
problema variacional a um determinado subespaço com dimensão finita do espaço das
funções admissíveis, i.e., ht tS S⊂ e hV V⊂ . Portanto, seja ˆ:e e eΩ →ΩF tal que ˆ e∈Ωξ
e ( ) ( )e e= ∈Ωx ξ F ξ uma função de mapeamento inversivel entre as coordenadas do
domínio físico eΩ e um domínio paramétrico qualquer ˆ eΩ , os espaços de elementos
finitos htS e hV representados usualmente por funções polinomiais contínuas por partes
podem ser definidos como (HUGHES, 2000):
( ){ }
( ){ }
1
1
; | , 0 em
; | , 0 em
ej j
e
h h h e h ht t e m
h h h e h he m
S G S G P G I
V w V w P w
Ω
Ω
= ∈ ∈ Ω = Γ ×
= ∈ ∈ Ω = Γ
y y F
F
(3.6)
onde ( )ˆ emP Ω representa o espaço de polinômios de grau menor ou igual a m com
1m ≥ definido no elemento ˆ eΩ e jy representa o ponto fonte sendo aplicado nas
coordenadas nodais da malha de elementos finitos.
Portanto, a aproximação para a função de Green como já definido na Eq. (2.26)
bem como a definição da função de ponderação são dadas por:
( ) ( ) ( )1
, ,hj k kj
k
G t N G tη ηΓ∈ −
= ∑x y x (3.7)

28
( ) ( )1
hi i
i
w N wη ηΓ∈ −
= ∑x x (3.8)
onde ( )kN x representa a função de interpolação global associada ao ponto nodal k . A
função global pode ser construída a partir das funções de interpolação locais definidas
por ( )ekN x (i.e., a restrição de ( )kN x em eΩ ) tendo em vista a definição (3.6).
Entretanto, na prática apenas as funções de interpolação local no domínio paramétrico
são utilizadas para o cálculo das matrizes e vetores envolvidos no MEF como descrito
em detalhes em BATHE (1996), HUGHES (2000) e ZIENKIEWICZ et al. (2005), por
exemplo. Além disso, as funções de interpelação possuem a propriedade da função delta
de Kronecker, i.e.:
( )1,
,0,k i ki
k iN k i
k iδ η
=⎧= = ∀ ∈⎨ ≠⎩
x (3.9)
Substituindo as aproximações (3.7)-(3.8) nas Eqs. (3.3)-(3.4) e utilizando a
propriedade (3.9), o problema variacional discreto utilizando a aproximação de Galerkin
pode ser definido como: para 0t ≥ encontrar ( ), ,h hj tG t S∈x y tal que para todas as
funções de ponderação ( )h hw V∈x e 1,2, , eqj n= … , tem-se:
( ) ( ) ( ) ( ) ( ) ( )1 1
0,e e
nel nel
e e e ei k kj i k kj
e e
N cN d G t N k N d G tρ= =Ω Ω
Ω + ∇ ⋅ ∇ Ω =∑ ∑∫ ∫x xx x x x
(3.10)
( ) ( ) ( )1
1
0 1 ,e
nel
e ei k kj ij
e
N cN d G iρ η ηΓ
= Ω
Ω = ∈ −∑∫ xx x (3.11)
As Eqs. (3.10)-(3.11) podem ser reescritas em forma matricial como:
29
( ) ( )
( ) 10j j
j j
t t−
+ =
=
Mg Kg 0
g M 1, 1, 2, , eqj n= … (3.12)
ou em termos da matriz de Green levando em consideração todas as colunas como:
( ) ( )
( ) 10
t t−
+ =
=
MG KG 0
G M (3.13)
onde M e K são as matrizes capacitância e condutância, respectivamente, ambas
claramente definidas na Eq. (3.10), : eqnj I →g representa o vetor de Green como
definido no capítulo anterior e eqnj ∈1 um vetor base unitário (i.e., 1ij ijδ= ).
Como observado na Eq. (3.12), a aplicação do MEF somente na variável espacial
produz um sistema de equações diferencias ordinárias de primeira ordem. É importante
observar que diferentemente da função de Green analítica tradicional, na qual existe
uma singularidade em 0t = e j=x y , a função de Green numérica não possui nenhuma
singularidade quando 0t = e j=x y . De fato, a função de Green numérica para 0t = e
j=x y está relacionado a inversa da matriz capacitância e, portanto, seu valor é finito.
Todavia, quando os elementos da malha tenderem a zero a função de Green numérica
tende para infinito, resultando no mesmo valor da função de Green analítica.
3.3 Discretização temporal utilizando o método-θ e subpassos de tempo
O cálculo da matriz de Green no domínio do tempo dado pela Eq. (3.13) é
efetuado utilizando-se o método-θ de marcha no tempo amplamente difundido na
30
literatura e de fácil implementação computacional (WOOD, 1990, HUGHES, 2000). O
método-θ se baseia na interpolação linear dentro do intervalo de tempo da incógnita a
ser calculada, sendo sua derivada aproximada por diferenças finitas (para maiores
detalhes as referências WOOD (1990) e HUGHES (2000) são indicadas).
Como mencionado anteriormente, as Eqs. (2.13)-(2.16) foram utilizadas em
detrimento das Eqs. (2.7)-(2.9) para o cálculo da função de Green com o intuito de se
evitar a função delta de Dirac no tempo. Uma explicação mais detalhada para tal
preferência pode ser dada agora depois de comentado que a integração temporal é
efetuada pelo método-θ e se baseia no fato de que se as Eqs. (2.7)-(2.9) fossem
utilizadas, um sistema de equações diferencias ordinárias de primeira ordem com uma
fonte instantânea dada pela função delta de Dirac no tempo e condição inicial nula seria
obtido depois de efetuado a discretização espacial pelo MEF. Como a discretização
temporal pelo método-θ é feita utilizando operadores de diferenças finitas, tal método
não poderia ser aplicado uma vez que operadores de diferenças finitas não admitem
cargas concentradas aplicadas diretamente.
Para se inicializar a marcha no tempo utilizando o método da aproximação
Explícita de Green dado pela Eq. (2.30), faz-se necessário o conhecimento prévio da
matriz de Green no instante de tempo t t= Δ e em geral em instantes anteriores a tΔ
dependendo do tipo de aproximação para a convolução. Com o objetivo de aumentar a
precisão e estabilidade do método proposto como será abordado em detalhes no
próximo capítulo, a matriz de Green é computada recursivamente em diferentes
instantes de tempo utilizando-se subpassos dados por ( )1 2, , , nt t tα α αΔ Δ Δ… tal que a
condição 1 2 nt t t tα α αΔ + Δ + + Δ = Δ… ou 1
1n
iiα
=
=∑ seja sempre satisfeita (LOUREIRO

31
& MANSUR, 2009b-c). Logo, aplicando o método-θ na Eq. (3.13), a seguinte
expressão é obtida:
( ) ( ) ( )( ) ( )11 , 1,2, ,i i i it t t t i nθα θ α −+ Δ = − − Δ =M K G M K G … (3.14)
onde 0
i
i jj
t tα=
= Δ∑ com 0 0α = sendo responsável pela contribuição da condição inicial.
Além disso, [ ]0,1θ ∈ é um parâmetro que controla a estabilidade e acurácia do método-
θ e n representa o número total de subpassos. Dentre as muitas possibilidades para o
parâmetro θ , os seguintes métodos mais conhecidos são obtidos como casos
particulares do método-θ (WOOD, 1990, HUGHES, 2000):
• Método de Euler explícito ( 0θ = )
• Método de Crank-Nicolson ( 1/ 2θ = )
• Método de Galerkin ( 2 / 3θ = )
• Método de Euler implícito ( 1θ = )
No procedimento de subpassos de tempo os parâmetros iα precisam ser
especificados. Para tal, os subpassos aqui propostos são classificados em três categorias,
são eles:
• Subpassos constantes
• Subpassos não-constantes
• Subpassos mistos

32
Figura 1. Classificação dos subpassos de tempo: (a) subpassos constantes; (b) subpassos não-constantes; (c) subpassos mistos.
(a)
(b)
(c)
33
A Figura 1 ilustra claramente os três tipos de subpassos. Como observado, no
procedimento de subpassos constantes, o intervalo de tempo tΔ é dividido em
intervalos menores e igualmente espaçados, ou seja, adotando-se 1/i nα = na Eq. (3.14)
. No procedimento de subpassos não-constantes, os parâmetros iα possuem valores
diferentes e serão descritos em detalhes no próximo capítulo (note que n é substituído
por m no contador i para diferenciar do subpasso constante de tempo). Já no
procedimento misto, adota-se uma combinação dos outros dois tipos de subpassos, ou
seja, substituindo tΔ por /t nΔ na Eq. (3.14) tal que para cada subpasso constante o
procedimento de subpassos não constantes para 1,2, ,i m= … é efetuado. No decorrer
da tese, a notação ,m nExGAθ para o método proposto da aproximação explícita de Green
é adotada, na qual o subscrito representa o parâmetro θ e o sobrescrito o número de
subpassos de tempo não-constantes e constantes, respectivamente.
3.4 Considerações numéricas
3.4.1 Função de Green modificada
Como observado na condição inicial da Eq. (3.13), a inversa da matriz
capacitância precisa ser computada para que o processo de marcha no tempo pelo
método-θ utilizado para o cálculo da matriz de Green possa ser inicializado. Caso a
matriz capacitância seja diagonal sua inversa é rapidamente obtida; entretanto, se a
mesma não for diagonal o cálculo de sua inversa torna-se oneroso, principalmente para
problemas em que a malha possua um número grande de elementos. Com o objetivo de

34
evitar a inversa da matriz capacitância, uma transformação dada por ( ) ( )t t=G G M
denominada de matriz de Green modificada é utilizada na Eq. (3.13), obtendo-se:
( ) ( )
( )0
t t+ =
=
MG KG 0
G I (3.15)
onde eq eqn n×∈I representa a matriz identidade.
Observe que a condição inicial na Eq. (3.15) é dada pela matriz identidade ao
invés da inversa da matriz capacitância como ocorre na Eq. (3.13). Vale ressaltar que a
matriz de Green modificada (ou função de Green modificada numérica) pode ser
interpretada como uma normalização da função de Green numérica no sentido de que a
condição inicial é dada sempre por um valor unitário independente da malha adotada ao
invés de um valor dependente da malha o qual tende para infinito quando a malha é
refinada como ocorre na função de Green numérica.
Tendo em vista tal transformação a Eq. (2.30) também precisa ser modificada,
sendo reescrita como:
( ) ( ) ( )1
0
t
k kkt t t dτ τ τ
Δ
+ = Δ + Δ − +∫T G T G R (3.16)
sendo ( ) ( )1k kt tτ τ−+ = +R M F .
Embora a inversa da matriz capacitância seja evitada na condição inicial da matriz
de Green modificada, a mesma é transferida para a convolução. Entretanto, dependendo
das condições de contorno, da fonte, da malha adotada e do número de passos de tempo
da análise em consideração, o cálculo do vetor ( )kt τ+R pode ser mais vantajoso do

35
ponto de vista computacional que o cálculo de ( ) 10 −=G M . Todavia, uma alternativa
mais viável se dá pela substituição da convolução pela solução particular do problema
como ficará mais claro adiante. A metodologia da solução particular se baseia no
método tradicional de soluções de equações diferenciais ordinárias (BOYCE &
DIPRIMA, 2001), na qual a solução final é construída através de uma solução
homogênea mais uma solução particular, i.e., ( ) ( ) ( )h pt t t= +T T T com
( ) ( )h t t=T G Mc sendo a solução homogênea dada em termos da matriz de Green e c
uma constante qualquer que é determinada assumindo 0t = . Portanto, a seguinte
expressão é encontrada:
( ) ( ) ( ) ( )( ) ( )0 0p pt t t= − +T G M T T T (3.17)
onde : eqnp I →T representa a solução particular relacionada ao vetor ( )tF .
Tendo em vista o mesmo procedimento de marcha no tempo adotado na Eq.
(2.30), a Eq. (3.17), considerando a matriz de Green modificada, pode ser escrita
recursivamente como:
( )( )1 1k k k kp pt+ += Δ − +T G T T T (3.18)
Como observado na expressão acima, tanto a matriz de Green modificada no
primeiro intervalo de tempo quanto a solução particular precisam ser calculados para se
inicializar o procedimento de marcha no tempo. Assim como para a matriz de Green, a
matriz de Green modificada é computada utilizando-se o método-θ como discutido na
seção 3.3.

36
3.4.2 Aproximação para a convolução
Uma vez que a matriz de Green é computada numericamente pelo método-θ de
marcha no tempo, faz-se necessário aproximar a convolução para que o procedimento
de marcha no tempo dado pela Eq. (2.30) ou Eq. (3.16) se inicialize. Na presente tese, a
convolução é aproximada utilizando o método da quadratura de Newton-Cotes
(QUARTERONI et al., 2010) e tal escolha se baseia no fato que subpassos de tempos
são utilizados para computar a matriz de Green dentro do primeiro intervalo de tempo e,
portanto, a convolução pode ser eficientemente implementada computacionalmente.
Mais especificamente apenas subpassos constantes são utilizados no cálculo da
convolução, já que a quadratura de Newton-Cotes de ordem p se baseia em intervalos
eqüidistantes. Tendo em vista os subpassos de tempo constantes, o intervalo de
integração é dividido em intervalos igualmente espaçados expressos por / ct nΔ tal que
0 10cn tτ τ τ= < < < = Δ… , sendo cn um múltiplo do número de subpassos constantes n .
Logo, a convolução pode ser aproximada como:
( ) ( ) ( ) ( )'
0
i p
c i
t
k k
i
t t d t t d
τ
η τ
τ τ τ τ τ τ
+Δ
∈
Δ − + = Δ − +∑∫ ∫G F G F (3.19)
onde { }1 2, , , ,c jc c cη = … … com ( 1) 'jc j p= − e
( ) ( ) ( ) ( )' 1
0
i p
i
p s
k i l k i l lc cl
t tt t d t t w Cn n
τ
τ
τ τ τ τ τ
+ +
+ +
=
⎛ ⎞Δ ΔΔ − + = Δ − + + ⎜ ⎟
⎝ ⎠∑∫ G F G F (3.20)
37
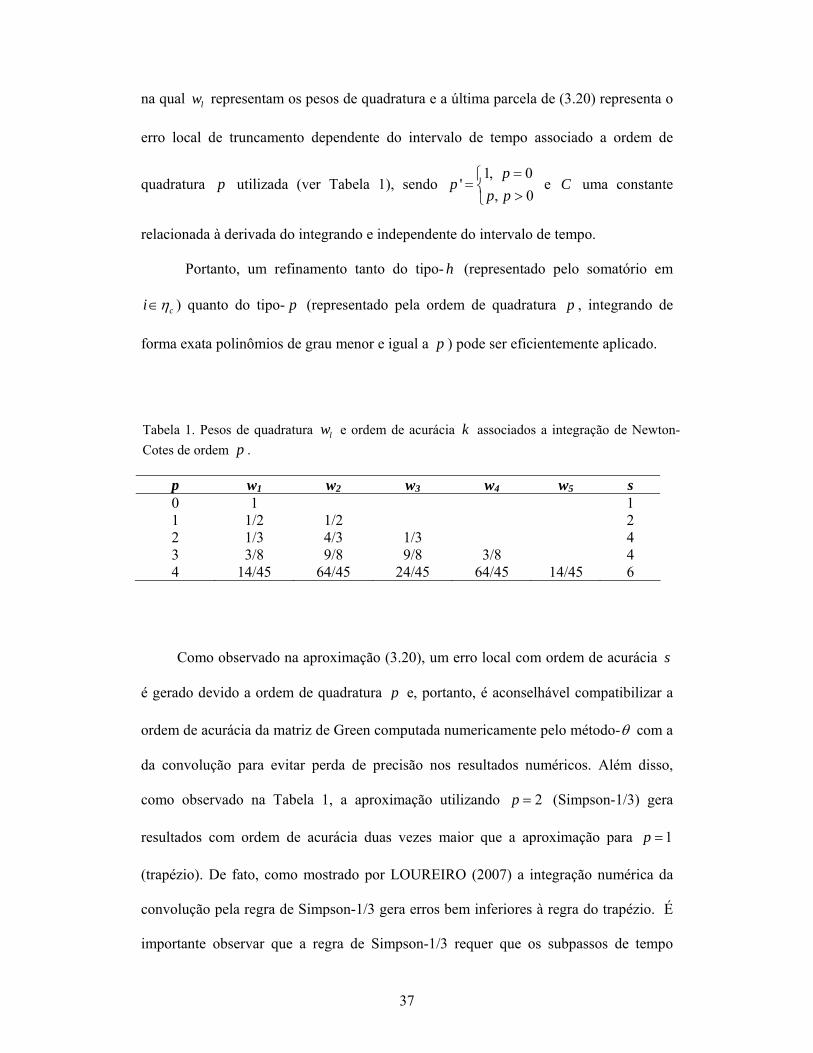
na qual lw representam os pesos de quadratura e a última parcela de (3.20) representa o
erro local de truncamento dependente do intervalo de tempo associado a ordem de
quadratura p utilizada (ver Tabela 1), sendo 1, 0
', 0
pp
p p=⎧
= ⎨ >⎩ e C uma constante
relacionada à derivada do integrando e independente do intervalo de tempo.
Portanto, um refinamento tanto do tipo- h (representado pelo somatório em
ci η∈ ) quanto do tipo- p (representado pela ordem de quadratura p , integrando de
forma exata polinômios de grau menor e igual a p ) pode ser eficientemente aplicado.
Como observado na aproximação (3.20), um erro local com ordem de acurácia s
é gerado devido a ordem de quadratura p e, portanto, é aconselhável compatibilizar a
ordem de acurácia da matriz de Green computada numericamente pelo método-θ com a
da convolução para evitar perda de precisão nos resultados numéricos. Além disso,
como observado na Tabela 1, a aproximação utilizando 2p = (Simpson-1/3) gera
resultados com ordem de acurácia duas vezes maior que a aproximação para 1p =
(trapézio). De fato, como mostrado por LOUREIRO (2007) a integração numérica da
convolução pela regra de Simpson-1/3 gera erros bem inferiores à regra do trapézio. É
importante observar que a regra de Simpson-1/3 requer que os subpassos de tempo
p w1 w2 w3 w4 w5 s 0 1 1 1 1/2 1/2 2 2 1/3 4/3 1/3 4 3 3/8 9/8 9/8 3/8 4 4 14/45 64/45 24/45 64/45 14/45 6
Tabela 1. Pesos de quadratura lw e ordem de acurácia k associados a integração de Newton-Cotes de ordem p .

38
sejam múltiplos de dois. Para contornar tal limitação deve-se utilizar em conjunto com a
regra de Simpson-1/3 a regra de Simpson-3/8 que exige subpassos múltiplos de três.
Desta maneira a integral de convolução é feita sem perda de acurácia uma vez que
ambas possuem a mesma ordem de acurácia.
Com o objetivo de facilitar a implementação computacional, a variação da força
externa é assumida como sendo linear dentro do intervalo de tempo [ ]1,k kt t + , i.e.,
1
( )k k
kkt t
τ τ+ −
+ = +Δ
F FF F ( 0 tτ≤ ≤ Δ ), gerando as seguintes expressões para 0p = ,
1p = e 2p = , respectivamente (LOUREIRO, 2007):
11 2
1 10
( ) ( ) ( ) ( )c c
t n n
k kk
j j
t t d j jτ τ τ
Δ
+
= =
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪Δ − + ≈ +⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑∫G F ψ F ψ F (3.21)
1 1
10
12 2
1
1 1( ) ( ) ( ) ( 1)2 2
1 1( ) ( 1)2 2
c
c
t n
kk
j
n
k
j
t t d j j
j j
τ τ τ
Δ
=
+
=
⎧ ⎫⎪ ⎪⎛ ⎞Δ − + ≈ + − +⎨ ⎬⎜ ⎟⎝ ⎠⎪ ⎪⎩ ⎭
⎧ ⎫⎪ ⎪⎛ ⎞+ −⎨ ⎬⎜ ⎟⎝ ⎠⎪ ⎪⎩ ⎭
∑∫
∑
G F ψ ψ F
ψ ψ F
(3.22)
/ 2
1 1 1
10
/ 2
12 2 2
1
1 4 1( ) ( ) (2 ) (2 1) (2 2)3 3 3
1 4 1(2 ) (2 1) (2 2)3 3 3
c
c
t n
kk
j
n
k
j
t t d j j j
j j j
τ τ τ
Δ
=
+
=
⎧ ⎫⎪ ⎪⎛ ⎞Δ − + ≈ + − + −⎨ ⎬⎜ ⎟⎝ ⎠⎪ ⎪⎩ ⎭
⎧ ⎫⎪ ⎪⎛ ⎞+ + − + −⎨ ⎬⎜ ⎟⎝ ⎠⎪ ⎪⎩ ⎭
∑∫
∑
G F ψ ψ ψ F
ψ ψ ψ F
(3.23)
onde 1 2( ) ( )(1 ) e ( ) ( )c c c c c c
t j t j t j t jj t j tn n n n n nΔ Δ Δ Δ
= Δ − − = Δ −ψ G ψ G .

39
3.4.3 Cálculo da Solução particular
A solução particular é construída a partir do método dos coeficientes
indeterminados (BOYCE & DIPRIMA, 2001). Uma vez que o tempo de análise foi
dividido em intervalos de tempos menores, a solução particular precisa ser especificada
somente nos intervalos de tempo [ ]1,k kt t I+ ⊂ ; portanto, um sistema de coordenadas
local dado por kt tτ = − com 0 tτ≤ ≤ Δ é adotado. Como a contribuição externa
relacionada as condições de contorno e fonte são dados por um conjunto de valores
discretos ao longo do tempo, principalmente em problemas práticos de engenharia, o
vetor de forças externa ( )tF no intervalo de tempo [ ]1,k kt t t +∈ pode ser aproximado
utilizando-se a seguinte base polinomial na coordenada local τ :
( ) ( ) ( )( ) ( )
1
2
11
mT
i i mi
m
p pτ τ τ τ τ=
⎛ ⎞⎜ ⎟⎜ ⎟= = =⎜ ⎟⎜ ⎟⎝ ⎠
∑
aa
F a p A
a
… (3.24)
onde ( )T τp é um vetor base de monômios contendo ( )mp τ termos e A um vetor
contendo os coeficientes a serem determinados.
O vetor coeficiente A é determinado aplicando a expressão (3.24) em l
predeterminados pontos ( )1 2, , , lτ τ τ… no intervalo de tempo [ ]1,k kt t + onde o vetor força
é conhecido, originando o seguinte sistema de equações:
( )( )
( )
( )( )
( )
1 1 1 1
2 2 2 2
11
1
m
m
l l m l m
pp
p
τ τ ττ τ τ
τ τ τ
⎛ ⎞ ⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟= = =⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠
F aF a
F PA
F a
(3.25)

40
No caso para l m= , P é uma matriz quadrada e, portanto, o vetor coeficiente é
facilmente determinado como 1−=A P F . É importante ressaltar que o vetor ( )τF pode
ser reescrito numa forma mais usual expressa por ( ) ( )Tτ τ=F N F , onde
( ) ( ) ( ) ( ) ( )( )11 2
T TlN N Nτ τ τ τ τ−= =N p P … representa o vetor contendo as
funções de interpolação dentro do intervalo [ ]1,k kt t + . Esse procedimento, na qual a
curva aproximada obrigatoriamente intercepta as coordenadas nodais dos pontos dados,
não é apropriado a um grande número de casos e uma metodologia mais geral se baseia
na aproximação por mínimos quadrados. Logo, quando l m> , o vetor coeficiente A
não pode ser calculado diretamente, já que a matriz P não é quadrada, sendo calculada
minimizando a seguinte expressão (HILDEBRAND, 1987):
( ) ( )( )2
1
lT
i ii
J τ τ=
= −∑ F p A (3.26)
Para realizar tal procedimento definem-se primeiramente os vetores jP
( 1, ,j m= … ) correspondentes as colunas da matriz P . Posteriormente, pode-se mostrar
que os vetores jP são linearmente independentes e, portanto, geram em l um
subespaço vetorial V de dimensão m (HILDEBRAND, 1987). Desta forma, minimizar
a expressão (3.26) implica que a distância de l∈F a nV∈ ⊂PA seja mínima, ou
seja, quando PA for a projeção ortogonal de F sobre V . Logo, os coeficientes são
calculados através do seguinte sistema de equações (HILDEBRAND, 1987):

41
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
( )( )
( )
11 1 2 1 1 1
1 2 2 2 2 2 2
1 2
,, , ,, , , ,
, , , ,T
T
m
m
m m m m m m
⎛ ⎞⎛ ⎞⎛ ⎞ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ = ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠P P P F
F PP P P P P P aP P P P P P a F P
P P P P P P a F P
(3.27)
onde a operação ( ), : l l× →i i representa o produto escalar.
Portanto, o vetor coeficiente é calculado como ( ) 1T T−=A P P P F e diferentemente
do caso anterior as funções de interpolação são agora escritas por
( ) ( )( ) 1T T T Tτ τ−
=N p P P P .
Uma vez calculado o vetor coeficiente A por uma das metodologias descritas
anteriormente, o próximo passo é definir a solução particular tendo em vista a
aproximação da força externa. Como a Eq. (3.24) é utilizada, a solução particular é dada
por (BOYCE & DIPRIMA, 2001):
( ) ( ) ( )( ) ( )
1
2
11
mT
p i i mi
m
p pτ τ τ τ τ=
⎛ ⎞⎜ ⎟⎜ ⎟= = =⎜ ⎟⎜ ⎟⎝ ⎠
∑
bb
T b p B
b
… (3.28)
O vetor coeficiente B é calculado substituindo a Eq. (3.28) na equação semi-
discreta de elementos finitos, i.e., ( ) ( ) ( )T T Tτ τ τ+ =Mp B Kp B p A . Depois de
comparar os coeficientes que multiplicam os mesmos termos em τ , a seguinte
expressão é obtida:
1, , 1, ,1j j jj j m m+= − = −Kb a Mb … (3.29)
com a condição 1m+ =b 0 .

42
É importante ressaltar que o procedimento adotado para se calcular a solução
particular possui as seguintes vantagens do ponto de vista computacional: (i) qualquer
função contínua dentro do intervalo de tempo pode ser representada pela solução
particular adotada; (ii) fácil implementação computacional; (iii) a matriz K precisa ser
fatorada uma única vez para calcular os coeficientes jb ; e (iv) uma estratégia adaptativa
para a solução particular pode ser eficientemente implementada tendo em vista a
aproximação da força externa para cada intervalo de tempo. Note que o mesmo
procedimento numérico de solução de um sistema de equações efetuado para o cálculo
da força ( )kt τ+R quando a matriz capacitância é consistente na convolução se aplica
na Eq. (3.29), tornando a solução particular mais indicada. Assim como fora feito na
convolução, supondo uma variação linear da força externa dentro de cada intervalo de
tempo [ ]1,k kt t + , i.e., assumindo 2m = na Eq. (3.24) resulta em ( ) 1 2τ τ= +F a a . Os
coeficientes 1a e 2a são calculado pela Eq. (3.25) como:
( )( )
1
2
0 1 01t t
⎛ ⎞ ⎛ ⎞⎛ ⎞=⎜ ⎟ ⎜ ⎟⎜ ⎟Δ Δ⎝ ⎠⎝ ⎠⎝ ⎠
F aF a
(3.30)
Resolvendo o sistema de equações acima resulta em ( )1 0=a F e
( ) ( )2
0tt
Δ −=
ΔF F
a (ou 1k=a F e
1
2
k k
t
+ −=
ΔF Fa na coordenada global). Assumindo
2m = na Eq. (3.28), a solução particular é dada por:
( ) 1 2p τ τ= +T b b (3.31)
onde os coeficientes 1b e 2b de acordo com (3.29) são calculados como:
43
1
2
1 2
k k
k
t
+ −=
Δ= −
F FKb
Kb F Mb (3.32)
Tendo em vista a Eq. (3.18) de marcha no tempo, a solução particular nos
instantes de tempo kt t= e 1kt t += precisam ser calculadas, o que resulta 1kp =T b e
11 2
kp t+ = + ΔT b b .
A principal diferença entre a utilização da convolução e da solução particular para
a implementação da força externa ( )tF se baseia no fato que na convolução erros
numéricos devido a integração numérica utilizada são cometidos, enquanto que na
solução particular tem-se uma implementação analítica supondo é claro que a função de
forma para a força externa a represente corretamente. Outro fator importante para a
escolha da convolução ou da solução particular se relaciona a metodologia numérica
empregada para se computar a matriz de Green.
Como exemplo, foi apresentado um procedimento de subpassos de tempo na qual
a matriz de Green foi computada utilizando o método-θ . Contudo, no caso de
subpassos constantes a convolução pode ser eficientemente utilizada como fora
discutido anteriormente, mas para subpassos não-constantes o uso da convolução se
torna extremamente complicado já que os valores de iα referentes aos subpassos não-
constantes são números complexos, i.e., iα ∈ como será explicado em detalhes no
próximo capítulo e, portanto, a solução particular deve ser utilizada. Além disso, em
metodologias híbridas baseadas em domínios transformados, e.g., Laplace e Fourier
(SOARES & MANSUR, 2003, 2005, LOUREIRO et al., 2009a, LOUREIRO &
MANSUR, 2009d) a utilização da solução particular se torna ainda mais atrativa uma

44
vez que nesses métodos a matriz de Green é computada diretamente no primeiro
instante de tempo sem nenhuma dependência de passos de tempo anteriores. De fato, o
uso da convolução para essas metodologias envolvendo domínios transformados torna-
se computacionalmente mais oneroso uma vez que matrizes de Green para intervalos de
tempo menores que tΔ precisam ser também computadas a fim de calcular a
convolução de forma precisa e compatível com a precisão da matriz de Green
computada.

45
4 Análise de Convergência com Relação a Variável Temporal
Capítulo 4 Análise de Convergência com Relação a Variável Temporal 4.1 Introdução
O presente capítulo tem por objetivo estudar e apresentar de forma detalhada a
convergência do método da aproximação explícita de Green no domínio do tempo
aplicado a problemas parabólicos utilizando subpassos de tempo. De acordo com o
teorema de equivalência de Lax, consistência e estabilidade são condições suficientes
para garantir que um método de integração temporal para problemas lineares seja
convergente. A consistência pode ser inferida analisando a ordem de acurácia do
método, garantindo que a ordem de acurácia seja pelo menos igual a um. Ao invés de
proceder com a análise de acurácia e estabilidade diretamente na expressão do método
da aproximação explícita de Green com vários graus de liberdade, será mostrado, sem
perda de generalidade, que tal análise pode ser transferida para um problema com um
grau de liberdade depois de efetuado um procedimento de desacoplamento das
equações. Tal procedimento visa um melhor entendimento das propriedades
relacionadas à análise de acurácia e estabilidade, resultando numa metodologia mais
simples, geral e eficaz.
46
4.2 Conceito de estabilidade
Um método numérico por definição é estável se uma pequena perturbação na
condição inicial resulta em pequenas mudanças na solução numérica ao longo do tempo
(QUARTERONI et al., 2010). Portanto, seja ( )A tT e ( )B tT duas soluções distintas
para o mesmo problema em consideração (i.e., mesma discretização e condições de
contorno) com ( )B tT sendo a solução devido a uma pequena perturbação ou erro na
condição inicial de ( )A tT , ou seja, ( ) ( ) ( )0 0 0B A= +T T E , as respostas ao longo do
tempo para os vetores ( )A tT e ( )B tT de acordo com a Eq. (2.30) são dadas por (é
importante ressaltar que as mesmas conclusões apresentadas nesta seção também se
aplicam para a Eq. (3.18) envolvendo a solução particular):
( ) ( ) ( )1
0
A A
t
k kkt t t dτ τ τ
Δ
+ = Δ + Δ − +∫T G MT G F (4.1)
( ) ( ) ( ) ( )1
1 1
0
A A
k kB B
t
k k k kkt t t dτ τ τ
+
Δ
+ ++ = Δ + + Δ − +∫T T
T E G M T E G F (4.2)
Subtraindo a Eq. (4.2) da Eq. (4.1), a seguinte expressão para o erro ao longo do
tempo é encontrada:
( )1 1
1
k k k kB A B A
k kt+ +
+
− −
= ΔT T T T
E G M E (4.3)
ou em termos do erro inicial em um instante de tempo qualquer kt k t= Δ :

47
( )( ) 0kk t= ΔE G M E (4.4)
Observe que o erro é independente da convolução, e como exemplificado por
LOUREIRO & MANSUR (2009d) o operador convolução é linear ao longo do tempo
(i.e., não possuindo nenhuma potência como ocorre na matriz ( )tΔG M ) e, portanto,
não ocasionando acúmulo de erro no procedimento de marcha no tempo. De fato, isto
pode ser analisado calculando o vetor temperatura em um instante de tempo qualquer
kt k t= Δ utilizando a expressão (4.1) resultando em:
( )( ) ( )( ) ( )( )1 20 0 1 1A A
k k kk kt t t− − −= Δ + Δ + Δ + +T G M T G M L G M L L… (4.5)
onde ( ) ( ) ( )0
t
kk kt t t dτ τ τ
Δ
≡ = Δ − +∫L L G F .
De acordo com a definição de estabilidade o vetor erro kE não deve crescer
indefinidamente ao longo do tempo. Para mensurar tal fato, a seguinte norma é
estabelecida:
( )( )0 0
0
k kB A B A
kk t− −
≤ Δ
T T T T
E G M E (4.6)
tal que a estabilidade é garantida se (QUARTERONI et al., 2010)
( )( ) , 0k
t C kΔ ≤ ∀ >G M (4.7)

48
onde ⋅ representa uma dada norma consistente e C < ∞ uma constante. Observe que
a Eq. (4.7) pode ser escrita em relação a matriz de Green modificada dada por
( ) ( )t tΔ = ΔG G M que por sua vez pode ser denominada de matriz de amplificação
dentro de um contexto de análise de estabilidade usualmente empregado na literatura.
Note que se ( )( ) 0k
tΔ →G quando k →∞ então 0k →E e, portanto, o erro
ou a perturbação inicial dada é eliminado no procedimento de marcha implicando em
estabilidade assintótica. Por outro lado, se ( )( )ktΔ →∞G quando k →∞ o erro
aumenta indefinidamente, implicando em instabilidade. Todavia, estabilidade também
pode ser inferida através do raio espectral da matriz de amplificação ( )tΔG definido
como ( )( ) max iitρ λΔ =G sendo iλ os autovalores da matriz de amplificação tal que a
condição ( )( ) 1tρ Δ ≤G seja sempre satisfeita. Além disso, a relação entre o raio
espectral e a norma da matriz de amplificação é dada por ( )( ) ( )t tρ Δ ≤ ΔG G ou
( )( ) ( )( )1/
limkk
kt tρ
→∞Δ = ΔG G e, portanto, para ( )( ) 0
ktΔ →G quando k →∞
implica em ( )( ) 1tρ Δ <G . Ao invés de estudar a estabilidade do método de marcha no
tempo utilizando a Eq. (4.7) ou o raio espectral diretamente, é mais instrutivo adotar
primeiramente um processo de diagonalização para posteriormente efetuar uma análise
de estabilidade como apresentado nas próximas seções.
4.3 Matriz de Green analítica e Diagonalização
Antes de proceder com a análise de estabilidade e também de acurácia é
importante definir a matriz de Green analítica no domínio do tempo (analítica somente

49
na variável temporal uma vez que o método dos elementos finitos fora utilizado na
variável espacial). De acordo com a teoria de solução de equações diferencias ordinárias
(BOYCE & DIPRIMA, 2001), a matriz de Green solução da Eq. (3.13) é dada por:
( ) 1tt e− −= AG M (4.8)
e conseqüentemente a matriz de Green modificada analítica é expressa por:
( ) tt e−= AG (4.9)
onde 1−=A M K é utilizado para simplificar a notação. Observe que no instante inicial a
matriz de Green analítica corresponde a inversa da matriz capacitância enquanto que a
matriz de Green modificada corresponde a matriz identidade como esperado.
Como fora discutido na seção anterior a análise de estabilidade utilizando a matriz
acoplada do sistema discreto representado pela Eq. (4.3) é raramente utilizada na prática
e uma maneira equivalente e mais usual baseia-se numa mudança de base (ou
coordenadas) visando o desacoplamento das equações relacionadas a matriz de
amplificação através de um procedimento de diagonalização da matriz A . Portanto, a
diagonalização da matriz A se inicializa calculando-se seus autovalores e autovetores
através da seguinte expressão (QUARTERONI et al., 2010):
( )λ− =A I φ 0 (4.10)
resultando em eqn autovalores e autovetores expressos por
1 1( , ), , ( , ), , ( , )eq eqj j n nλ λ λφ φ φ… … tal que ( )j jλ− =A I φ 0 com

50
10eqj nλ λ λ≤ ≤ ≤ ≤ ≤… … . Assumindo autovetores linearmente independentes, a matriz
A pode ser diagonalizada através da seguinte expressão (QUARTERONI et al., 2010):
1−=A SΛS (4.11)
onde ( )1, , , , eq eq
eq
n nj n
×= ∈S φ φ φ… … e ( )1, , , , eq eq
eq
n nj ndiag λ λ λ ×= ∈Λ … … são,
respectivamente, as matrizes contendo os autovetores e autovalores.
Substituindo a matriz de Green modificada analítica (4.9) na expressão do erro
dada pela Eq. (4.3) e utilizando a decomposição (4.11) observando que
1 1t te e−− Δ − Δ −=SΛS ΛS S , obtem-se:
1 1k t ke+ − Δ −= ΛE S S E (4.12)
ou utilizando a Eq. (4.4)
( ) 1 0kk te− Δ −= ΛE S S E (4.13)
Analisando as Eqs. (4.12)-(4.13) nota-se claramente que a estabilidade está
diretamente relacionada a matriz diagonal ( )1 , , , , nj eq tttte diag e e eλλλ − Δ− Δ− Δ− Δ =Λ … … .
Portanto, uma mudança de base (ou coordenadas) dada por 1−=E S E pode ser utilizada
na Eq. (4.12) visando o desacoplamento das equações, cujas componentes são expressas
como:
1
, 1, 2, ,k k
j tj j eqE e E j nλ+ − Δ= = … (4.14)
51
Como observado na equação acima para cada componente do vetor E (i.e., jE )
existe um fator de amplificação (terminologia usada em referência a matriz de
amplificação ( )tΔG ) relacionado a um determinado autovalor definido como:
( ) j tj jA g t e λ− Δ≡ Δ = (4.15)
Claramente a estabilidade no sistema de coordenadas original =E SE é garantida
se e somente se a seguinte condição for satisfeita:
1, 1,2, ,j eqA j n≤ = … (4.16)
A condição acima pode ser interpretada a partir do raio espectral da matriz de
amplificação definido anteriormente reconhecendo que ao invés de uma matriz de
amplificação tem-se agora um fator de amplificação dado por um número escalar e,
portanto, ( )j jA Aρ = . Obviamente, como a matriz de amplificação (ou matriz de
Green modificada) analítica foi utilizada, os fatores de amplificação expressos por
funções exponenciais como observado na Eq. (4.15) ocasionam sempre em resultados
estáveis como esperado. De fato, para 0jλ > estabilidade assintótica é observada já que
( ) ( ) 0jkk t
jA e λ− Δ= → quando k →∞ uma vez que 1j te λ− Δ < e para 0jλ = tem-se
( ) 1, 0k
jA k= ∀ > .
52
4.4 Análise de acurácia e estabilidade para o método da aproximação explícita de Green
Uma vez introduzido e discutido o conceito de estabilidade utilizando a matriz de
Green analítica através de um procedimento de diagonalização, a estabilidade bem
como a acurácia empregando a matriz de Green numérica calculada pelo método-θ
pode ser inicializada. Entretanto, primeiramente, faz-se necessário realizar um
procedimento de diagonalização também na matriz de amplificação numérica (i.e., a
matriz de Green modificada numérica). Logo, empregando a Eq. (3.14) para calcular a
matriz de Green modificada e reescrevendo-a em função da matriz 1−=A M K pré-
multiplicando pela matriz capacitância, a seguinte expressão é obtida:
( ) ( ) ( )( ) ( )11 , 1, 2, ,i i i it t t t i nθα θ α −+ Δ = − − Δ =I A G I A G … (4.17)
Observando que ( )0 =G I de acordo com a Eq. (3.15), a matriz de Green
modificada numérica no instante de tempo t t= Δ em função do número de subpassos
de tempo constantes n e não-constantes m pode ser escrita como:
( ) ( )1
1
1
nm
i i
i
t ttn n
θα θ α−
=
⎛ ⎞⎛ ⎞Δ Δ⎛ ⎞ ⎛ ⎞⎜ ⎟Δ = + − −⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠∏G I A I A (4.18)
Introduzindo a matriz diagonalizada 1−=A SΛS definida anteriormente pela Eq.
(4.11) e observando que 1−=I SS , a expressão recursiva do erro dado pela Eq. (4.3)
utilizando a matriz de Green modificada numérica (4.18) é escrita como:

53
( )1
1 1 1 1 1
1
1
nm
k ki i
i
t tn n
θα θ α−
+ − − − −
=
⎛ ⎞⎛ ⎞Δ Δ⎛ ⎞ ⎛ ⎞⎜ ⎟= + − −⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠∏E SS SΛS SS SΛS E (4.19)
ou em relação a base 1−=E S E responsável pelo desacoplamento das equações como:
( )1
1
1 1 /, 1, 2, ,
1 /k k
nm
i jj j eq
i ji
t nE E j n
t nθ α λθα λ
+
=
⎛ ⎞− − Δ⎜ ⎟= =⎜ ⎟+ Δ⎝ ⎠∏ … (4.20)
Analisando a expressão acima, nota-se claramente que o fator de amplificação
numérico é dado por:
( )
1
1 1 /, 1,2, ,
1 /
nm
i jj eq
i ji
t nA j n
t nθ α λθα λ
=
⎛ ⎞− − Δ⎜ ⎟= =⎜ ⎟+ Δ⎝ ⎠∏ … (4.21)
De uma maneira geral o fator de amplificação numérico (4.21) deve convergir
para o fator de amplificação analítico (4.15) e as seguintes características devem ser
levadas em consideração na seleção de um procedimento de marcha no tempo para a
solução de um determinado problema (ARGYRIS et al., 1977, HUGHES, 2000):
i. Auto-inicialização, i.e., nenhum procedimento especial é necessário para
se iniciar o procedimento de marcha no tempo.
ii. A-estabilidade (ou estabilidade incondicional), i.e., 1jA ≤ para todo jtλΔ .
iii. Comportamento não oscilatório, i.e., 0jA ≥ para todo jtλΔ .
iv. L-estabilidade, i.e., 0jA → quando j tλ Δ →∞ .
v. Ordem de acurácia.
54
A característica (i) indica que a solução no instante 1kt + depende apenas da
solução do passo anterior kt ; conseqüentemente, nenhum outro método de marcha no
tempo precisa ser empregado para o início do procedimento de marcha no tempo. Além
disso, nenhum vetor adicional para instantes de tempo anteriores a kt precisa ser
armazenado. A característica (ii) garante que resultados estáveis são sempre alcançados
independentemente do intervalo de tempo utilizado. Para evitar oscilações na solução
numérica para qualquer intervalo de tempo selecionado a condição (iii) deve ser
satisfeita. De fato, como o fator de amplificação analítico dado pela função exponencial
é sempre positivo, a ocorrência de um fator de amplificação numérico negativo implica
que valores positivos e negativos na solução se alternarão no decorrer do procedimento
de marcha no tempo.
De uma maneira geral, métodos clássicos de discretização espacial como, por
exemplo, o método dos elementos finitos, não calculam de forma precisa os autovalores
superiores (HUGHES, 2000, STRANG & FIX, 2008); conseqüentemente, a propriedade
(iv) deve ser levada em consideração em determinados tipos de problemas nos quais os
modos altos espúrios precisam ser eliminados. Finalmente, a propriedade (v) está
diretamente relacionada não somente com o tamanho do intervalo de tempo a ser
utilizado, mas também com a compatibilização da ordem de acurácia temporal e
espacial. Os denominados métodos de integração temporal de ordem superior são
exemplos de tais características, permitindo o uso de intervalos de tempo maiores para
se efetuar a análise diminuindo assim o número total de passos de tempo sendo,
portanto, sua principal vantagem. Comumente, métodos de discretização espacial de
ordem superior (e.g., formulação do tipo p e espectral de elementos finitos) são
utilizados em certos problemas e muitas vezes tornam-se vantajoso o uso de métodos de
55
integração temporal também de ordem superior objetivando compatibilizar a ordem de
acurácia temporal com a espacial.
Uma vez comentado as propriedades desejáveis de um método de integração
temporal, pode-se proceder com a análise de estabilidade e acurácia do método da
aproximação Explícita de Green utilizando o fator de amplificação numérico (4.21).
Mais especificamente a análise de acurácia será primeiramente efetuada, posteriormente
a análise de estabilidade e das propriedades (i)-(iv) serão inferidas através dos gráficos
do fator de amplificação.
Como fora comentado, existem três tipos de subpassos de tempo possíveis para se
computar a função de Green. A análise de estabilidade e acurácia utilizando subpassos
de tempo constantes (i.e., 1m = e n variável) não será efetuada de forma detalhada na
presente tese, já que a mesma pode ser encontrada em VASCONCELLOS (2009)
(utilizando o método-θ ) e em LOUREIRO & MANSUR (2009b) (utilizando o método
de Runge-Kutta) sendo apenas estudada dentro do contexto de subpassos de tempo
mistos. Portanto, a análise de estabilidade e acurácia utilizando subpassos de tempo
não-constantes (i.e., m variável e 1n = ) terá maior enfoque sendo efetuada de forma
detalhada.
Como observado no fator de amplificação (4.21), o procedimento de subpassos de
tempo não-constantes requer o conhecimento dos parâmetros iα . Tais parâmetros são
calculados levando em consideração a propriedade (v) referente a ordem de acurácia do
método, comparando o fator de amplificação analítico e numérico. Para tal o erro local
de truncamento ( )tε Δ , i.e., a diferença entre a expansão em série de Taylor do fator de
amplificação analítico e numérico é analisado. Portanto, a expansão em série de Taylor
do fator de amplificação analítico anjA é dada por:

56
( )2 2
0
1 11 12 ! !
j
k kkt jan k k
j j j j
k
tA e t t t
k kλ λ
λ λ λ∞
− Δ
=
Δ= = − Δ + Δ − + Δ − = −∑… … (4.22)
Devido a grande quantidade de expressões e sem perda de generalidade o método-
θ com 1θ = será utilizado primeiramente para se calcular os parâmetros iα .
Posteriormente, uma generalização para qualquer valor de θ será apresentado. Logo, a
expansão em série de Taylor do fator de amplificação numérico ,
1m nExGA
iA dado pela Eq.
(4.21) para 1θ = pode ser escrita como (LOUREIRO & MANSUR, 2009c):
( )
,1 1 2 1 2
1 2 1 21 2 1 2
1 2 1 2
1 2 1 21 2 1 2
2 21 2 1 2
, , , 0 , , , 01 2
1 2 1 2
, , , 0 0 , , , 0
1
1
m ns s
s ss s
s s
s ss s
ExGA m mm m m mj s j s j
m m m m m mm m m m m m
km mm m m mk k k ks j s j
m m m k m m mm m m k m m m k
A t t
t t
α α α λ α α α λ
α α α λ α α α λ
≥ ≥+ + + = + + + =
≥ = ≥+ + + = + + + =
= − Δ + Δ −
+ Δ − = − Δ
∑ ∑
∑ ∑… …… …
… …… …
… …
… … … …∞
∑
(4.23) Um método de integração temporal possui ordem de acurácia s , i.e., ( )1sO t +Δ se
todos os termos da expansão em série de Taylor do fator de amplificação analítico e
numérico coincidirem até o termo stΔ , ou seja, ( ) 1st c tε +Δ ≤ Δ +… , onde 1sc t +Δ é
denominado erro de truncamento local principal sendo c uma constante independente
do intervalo de tempo (HAIRER et al., 1987). Portanto, comparando as Eqs. (4.22)-
(4.23) termo a termo, obtem-se o seguinte sistema de equações polinomiais:
1 2
1 21 2
1 2
, , , 01
1 para 1s
ss
mm ms
m m mm m m
sα α α≥
+ + + =
= =∑……
… (4.24)
1 2
1 21 2
1 2
, , , 02
1 para 22
s
ss
mm ms
m m mm m m
sα α α≥
+ + + =
= =∑……
… (4.25)
1 2
1 21 2
1 2
, , , 03
1 para 36
s
ss
mm ms
m m mm m m
sα α α≥
+ + + =
= =∑……
… (4.26)

57
1 2
1 21 2
1 2
, , , 0
1 para !
s
ss
mm ms
m m mm m m k
s kk
α α α≥
+ + + =
= =∑……
… (4.27)
É importante observar que para se obter métodos com ordem de acurácia s , o
sistema de equações acima deve ser resolvido até m s= subpassos de tempo, o qual
pode ser escrito de forma compacta como ( )1 2, , , 0, 1, ,i sR i sα α α = =… … . Como
exemplo seja 2m s= = , as equações ( )1 1 2 1 2, 1 0R α α α α= + − = e
( ) 2 22 1 2 1 1 2 2, 1/ 2 0R α α α α α α= + + − = precisam ser resolvidas para se determinar os
valores de 1α e 2α .
Com o objetivo de tornar o cálculo dos parâmetros iα mais compacto a
metodologia de bases de Gröebner que transforma o sistema original de equações
polinomiais em um conjunto de polinômios com o mesmo conjunto de raízes do sistema
original pode ser utilizada para simplificar o sistema de equações original. Portanto,
reduzindo ( )1 2, , , 0, 1, ,i sR i sα α α = =… … nas bases de Gröebner, o primeiro polinômio
da base de Gröebner para cada sistema de equações considerando m s= denominado
( )1mP α é listado na Tabela 2 até 8m = .
Percebe-se claramente que o sistema de equações polinomial original se reduz a
um polinômio de grau m que depende somente de um parâmetro. Finalmente, os
valores de , 1, ,i i mα = … são facilmente determinados calculando as raízes de tal
polinômio, i.e., ( )1 0mP α = . A Tabela 3 mostra os valores dos parâmetros iα até 8m =
subpassos de tempo (obviamente para 1m = , o fator de amplificação (4.21) é
equivalente ao do método-θ ).

58
0.00 0.25 0.50 0.75 1.00-1.0
-0.5
0.0
0.5
1.0
Pm(θ)
θ
P2(θ) P3(θ) P4(θ) P5(θ)
subpassos (m) Polinômio ( )mP θ Polinômio ( )1mP α
2 ( 1 2 )θ− + 21 11 2 2α α− +
3 ( ) 22 (1 3 3 )P θ θ θ− + 2 3
1 1 11 3 6 6α α α− + − +
4 ( ) 23 (1 2 2 )P θ θ θ− + 2 3 4
11 1 11 4 12 24 24α αα α− + − +
5 ( ) 24 (1 )P θ θ θ− + 2 3 4 5
1 1 1 1 11 5 20 60 120 120α α α α α− + − + − +
6 - 2 3 4 5
1 1 1 1 161
1 6 30 120 360 720
720
α α α α α
α
− + − + −
+
7 - 2 3 4 5
1 1 1 1 15 71 1
1 7 42 210 840 2520
5040 5040
− + − + − +
− +
α α α α α
α α
8 - 2 3 4 5
1 1 1 1 16 7 81 1 1
1 8 56 336 1680 6720
20160 40320 40320
α α α α α
α α α
− + − + −
+ − +
Figura 2. Curvas de ( )mP θ para 2,3, 4,5m = .
Tabela 2. Polinômios ( )mP θ e ( )1mP α considerando diferentes valores de subpassos de tempo não-constantes m .
59
Generalizando os procedimentos desenvolvidos anteriormente para qualquer valor
de θ , pode-se mostrar que o primeiro polinômio da base de Gröebner em termos de θ e
1α pode ser escrito como ( ) ( ) ( )1 1, 0m m mP P Pθ α θ α= = . Como a solução para
( )1 0mP α = e ( ) 0mP θ ≠ é procurada, percebe-se a partir da Tabela 2 que para 1/ 2θ = a
condição mencionada anteriormente não é satisfeita. De fato, polinômios ( )mP θ até
4m = são plotados na Figura 2 para 0 1θ≤ ≤ ; nota-se claramente que ( ) 0mP θ = para
qualquer valor de m se e somente se 1/ 2θ = . Logo, a presente metodologia
empregando subpassos de tempo não-constantes é somente aplicada para
[ ) ( ]0,1/ 2 1/ 2,1θ ∈ ∪ ou, em outras palavras, para métodos de primeira ordem obtidos
da família do método-θ . É importante ressaltar que embora os subpassos não-
constantes de tempo sejam números complexos, a matriz de Green no instante de tempo
t t= Δ é composta somente de números reais e apenas algumas matrizes calculadas no
decorrer do procedimento de subpassos de tempo não-constantes são números
complexos.
Uma vez determinados os parâmetros iα , a análise de acurácia utilizando tanto
subpassos de tempo constantes quanto mistos pode ser efetuada. Como exemplo,
subpassos mistos considerando 2m = e n variável será utilizado para mostrar as
implicações dos subpassos na acurácia. Portanto, expansão em série de Taylor do fator
de amplificação para tais subpassos e para qualquer valor de θ é dada por:
2,0
22 2 3 3
2
2 2 34 4
2 3
1 1 1 3 31 12 6
1 4 12 12 3 12 18 12124
nExGAj j j j
j
A t t tn
tn n
θ θλ λ λ
θ θ θ θ θ λ
⎛ ⎞− + −= − Δ + Δ − + Δ +⎜ ⎟
⎝ ⎠⎛ ⎞+ − − + −+ + Δ −⎜ ⎟
⎝ ⎠…
(4.28)

60
Tabela 3*. Parâmetros iα dos subpassos de tempo não-constantes.
m=1 m=2 m=3 m=4 m=5 m=6 m=7 m=8
1α 1 0.5-0.5i 0.626538 0.042626-0.394632i 0.458587 0.180097-0.304098i 0.362449 -0.077189-0.178558i
2α 0.5+0.5i 0.186730-0.480773i 0.042626+0.394632i -0.024360-0.317791i 0.180097+0.304098i -0.070933-0.213067i -0.077189+0.178558i
3α 0.186730+0.480773i 0.457373-0.235100i -0.024360+0.317791i -0.056122-0.258241i -0.070933+0.213067i 0.053121-0.254015i
4α 0.457373+0.235100i 0.295066-0.303014i -0.056122+0.258241i 0.103578-0.282062i 0.053121+0.254015i
5α 0.295066+0.303014i 0.376025-0.133474i 0.103578+0.282062i 0.210125-0.218514i
6α 0.376025+0.133474i 0.286130-0.195852i 0.210125+0.218514i
7α 0.286130+0.195852i 0.313942-0.085657i
8α 0.313942+0.085657i
*Esses valores são apenas representativos, já que mais casas decimais são necessárias dependendo da precisão utilizada.

61
Analisando a Eq. (4.28) percebe-se claramente que o fator de amplificação possui
ordem de acurácia 2, já que os três primeiros termos são equivalentes aos mesmos da
série de Taylor do fator de amplificação analítico, comprovando assim o aumento da
ordem de acurácia devido aos subpassos de tempo não-constantes m . Por outro lado,
os subpassos de tempo constantes n não são capazes de aumentar a ordem de acurácia;
entretanto, os erros de truncamento diminuem a medida que se aumenta o número de
subpassos constantes uma vez que os mesmos aparecem no denominador. Além disso,
quando n tende a infinito, o fator de amplificação numérico tende para o analítico
independentemente do valor de θ , i.e., 2,0lim
n
j
ExGA anj jt
A Aλ Δ →∞
= indicando que para valores
grandes de n resultados precisos podem ser alcançados.
Os fatores de amplificação considerando os métodos de Crank-Nicolson, Euler
implícito, Euler explícito, ,11ExGAm , ,1
2 /3ExGAm , ,10ExGAm e 2,
0ExGA n (observe que a
notação ,ExGAm nθ é utilizada) são plotados nas Figuras 3-4 e comparados com o fator
de amplificação analítico.
Pode-se observar a partir da Figura 3 que os métodos ,11ExGAm e Euler implícito
satisfazem as propriedades (i)-(iv) discutidas anteriormente, mas por causa do aumento
da ordem de acurácia, os fatores de amplificação dos métodos ,11ExGAm tendem
rapidamente para o analítico. Por outro lado, os métodos de Cranck-Nicolson e
Galerkin violam a propriedade (iii) e conseqüentemente um comportamento oscilatório
é esperado dependendo do tamanho do intervalo de tempo utilizado. Similarmente, a
propriedade (iii) dos métodos ,12 /3ExGAm também é violada para subpassos m ímpares.
Portanto, subpassos m pares são recomendados para evitar oscilações na solução
numérica; todavia, para um número grande de subpassos m a propriedade (iv) é
restabelecida.

62
Antes de comentar a Figura 4(a) é importante ressaltar que métodos explícitos de
integração temporal são bastante utilizados em casos práticos devido ao seu baixo custo
computacional uma vez que a matriz capacitância é assumida como diagonal evitando
assim a solução de um sistema de equações. Entretanto, a principal desvantagem de
métodos explícitos é a restrição do intervalo de tempo em determinadas análises devido
ao limite de estabilidade do método explicito, requerendo intervalos de tempo muito
pequenos. Analisando a Figura 4(a) observa-se claramente que o limite de estabilidade
dos métodos explícitos 2,0ExGA n não aumenta de forma significativa aumentando o
número de subpassos m . Além disso, os fatores de amplificação são sempre positivos
para números pares de subpassos e negativos para números impares. Por outro lado, a
Figura 4(b) mostra claramente que o número de subpassos constantes n aumenta o
limite de estabilidade linearmente, ou seja, para os métodos 2,0ExGA n o limite de
estabilidade é dado por max 2t nλ Δ ≤ .
Portanto, embora os subpassos de tempo constantes não sejam capazes de
aumentar a ordem de acurácia do método, o mesmo é uma excelente ferramenta para
estender o limite crítico de estabilidade de métodos explícitos eliminando, portanto, a
principal desvantagem dos métodos explícitos clássicos. É importante ressaltar que o
método 2,0ExGA n é equivalente ao método ExGA-Runge-Kutta de segunda ordem de
acurácia apresentado por LOUREIRO & MANSUR (2009b). Logo, a metodologia de
subpassos de tempo é uma poderosa ferramenta não somente para se criar novos
métodos de marcha no tempo, mas também para estabelecer equivalências com
métodos já existentes de uma maneira unificada e generalizada.

63
Figura 3. Fatores de amplificação: (a) Analítico, Crank-Nicolson, Euler implícito e ,1
2 /3mExGAM para 2,3, 4m = e 1n = ; (b) Analítico, Crank-Nicolson, Galerkin e
,12 /3mExGAM para 2,3,4m = e 1n = .
10-2 10-1 100 101 102-1.0
-0.5
0.0
0.5
1.0
Aj
λjΔt
Analitico Crank-Nicolson Euler implicito ExGAm,1
1
m=2
m=3m=4
10-2 10-1 100 101 102-1.0
-0.5
0.0
0.5
1.0
Aj
λjΔt
Analitico Crank-Nicolson Galerkin ExGAm,1
2/3
m=2
m=3m=4
(a)
(b)
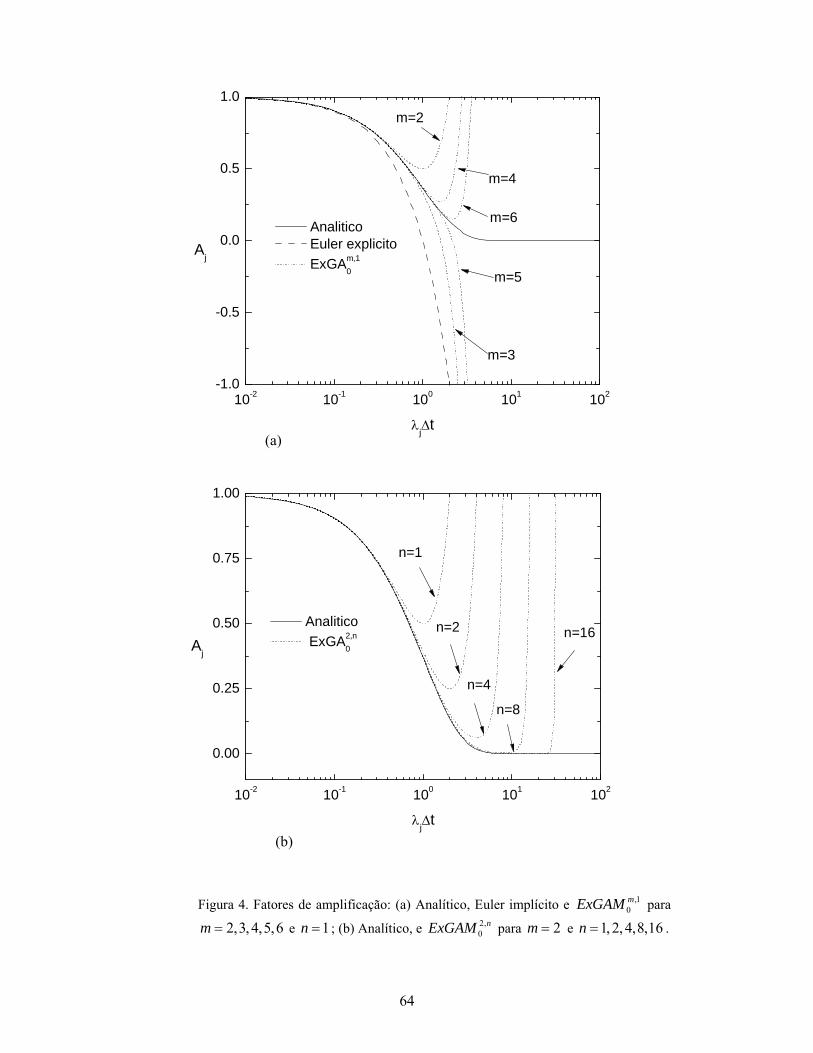
64
Figura 4. Fatores de amplificação: (a) Analítico, Euler implícito e ,10mExGAM para
2,3, 4,5,6m = e 1n = ; (b) Analítico, e 2,0
nExGAM para 2m = e 1, 2, 4,8,16n = .
10-2 10-1 100 101 102-1.0
-0.5
0.0
0.5
1.0
m=6
Aj
λjΔt
Analitico Euler explicito ExGAm,1
0
m=2
m=3
m=4
m=5
10-2 10-1 100 101 102
0.00
0.25
0.50
0.75
1.00
n=16
n=8
n=4
n=2Aj
λjΔt
Analitico ExGA2,n
0
n=1
(a)
(b)

65
5 Método da Aproximação Explícita de Green para Problemas Governados pela Equação Escalar da Onda: Equação Hiperbólica
Capítulo 5 Método da Aproximação Explícita de Green para Problemas Governados pela Equação Escalar da Onda: Equação Hiperbólica 5.1 Introdução
Assim como fora feito no capítulo 2, o presente capítulo tem por objetivo
apresentar as equações governantes que regem problemas escalares de propagação de
ondas bem como discutir características de sua função de Green associada. A solução
para a equação escalar da onda é efetuada através do método da aproximação explícita
de Green cuja expressão pode ser obtida de forma geral através da aplicação do método
dos resíduos ponderados no domínio espaço-tempo. Os passos para a obtenção de tal
expressão são extensões dos passos adotados no caso da equação parabólica; entretanto,
o método ExGA quando aplicado a equação hiperbólica possui características e
conceitos matemáticos bastante peculiares que o difere do método ExGA aplicado a
equação parabólica como será explorado neste capítulo.
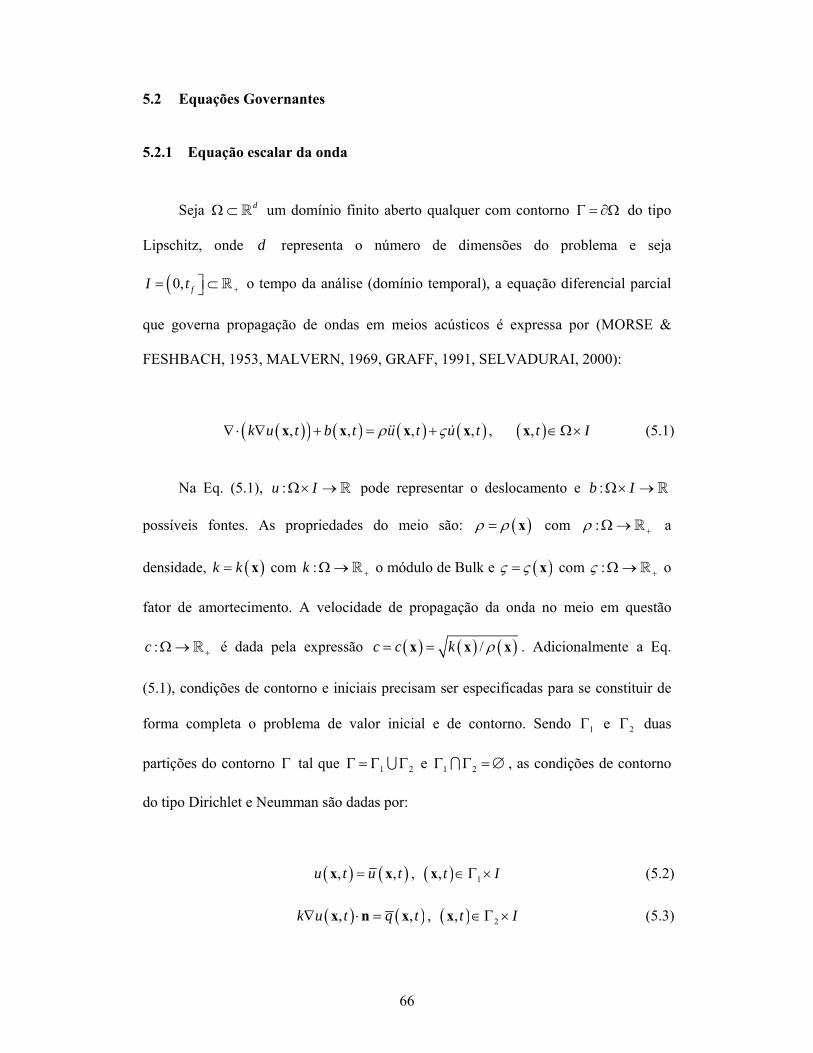
66
5.2 Equações Governantes
5.2.1 Equação escalar da onda
Seja dΩ⊂ um domínio finito aberto qualquer com contorno Γ = ∂Ω do tipo
Lipschitz, onde d representa o número de dimensões do problema e seja
(0, fI t +⎤= ⊂⎦ o tempo da análise (domínio temporal), a equação diferencial parcial
que governa propagação de ondas em meios acústicos é expressa por (MORSE &
FESHBACH, 1953, MALVERN, 1969, GRAFF, 1991, SELVADURAI, 2000):
( )( ) ( ) ( ) ( ), , , ,k u t b t u t u tρ ς∇⋅ ∇ + = +x x x x , ( ), t I∈Ω×x (5.1)
Na Eq. (5.1), :u IΩ× → pode representar o deslocamento e :b IΩ× →
possíveis fontes. As propriedades do meio são: ( )ρ ρ= x com :ρ +Ω→ a
densidade, ( )k k= x com :k +Ω→ o módulo de Bulk e ( )ς ς= x com :ς +Ω→ o
fator de amortecimento. A velocidade de propagação da onda no meio em questão
:c +Ω→ é dada pela expressão ( ) ( ) ( )/c c k ρ= =x x x . Adicionalmente a Eq.
(5.1), condições de contorno e iniciais precisam ser especificadas para se constituir de
forma completa o problema de valor inicial e de contorno. Sendo 1Γ e 2Γ duas
partições do contorno Γ tal que 1 2Γ = Γ Γ∪ e 1 2Γ Γ =∅∩ , as condições de contorno
do tipo Dirichlet e Neumman são dadas por:
( ) ( ), ,u t u t=x x , ( ) 1, t I∈Γ ×x (5.2) ( ) ( ), ,k u t q t∇ ⋅ =x n x , ( ) 2, t I∈Γ ×x (5.3)

67
onde 1:u IΓ × → e 2:q IΓ × → são funções prescritas para o deslocamento e sua
derivada normal (fluxo). As condições iniciais para o deslocamento e sua derivada
temporal são expressas como:
( ) ( )0,0u u=x x , ∈Ωx , 0t = (5.4) ( ) ( )0,0u u=x x , ∈Ωx , 0t = (5.5)
sendo 0 :u Ω→ e 0 :u Ω→ possíveis funções prescritas no domínio.
5.2.2 A função de Green
Assim como para a equação parabólica, a função de Green considerando o
mesmo domínio fechado Ω = Ω Γ∪ com condições de contorno homogêneas e as
mesmas propriedades físicas do problema original a ser resolvido é utilizada. Desta
forma, a equação diferencial relativa a função de Green e suas condições de contorno
homogêneas são escritas como:
( )( ) ( ) ( ) ( ) ( ), , , , , ,k G t t G t G tτ δ δ τ ρ τ ς τ∇ ⋅ ∇ − + − − = − + −x y x y x y x y , ∈Ωx , t τ> (5.6) ( ), , 0G t τ− =x y , 1∈Γx , t τ> (5.7) ( ), , 0k G t τ∇ − ⋅ =x y n , 2∈Γx , t τ> (5.8)
Como explicado e discutido no capítulo 2, as propriedades denominadas relação
temporal, reciprocidade e causalidade para a função de Green definidas para a equação
parabólica continuam sendo válidas para a função de Green relacionada à equação
hiperbólica. Entretanto, a propriedade (ou princípio) da causalidade é escrito de forma
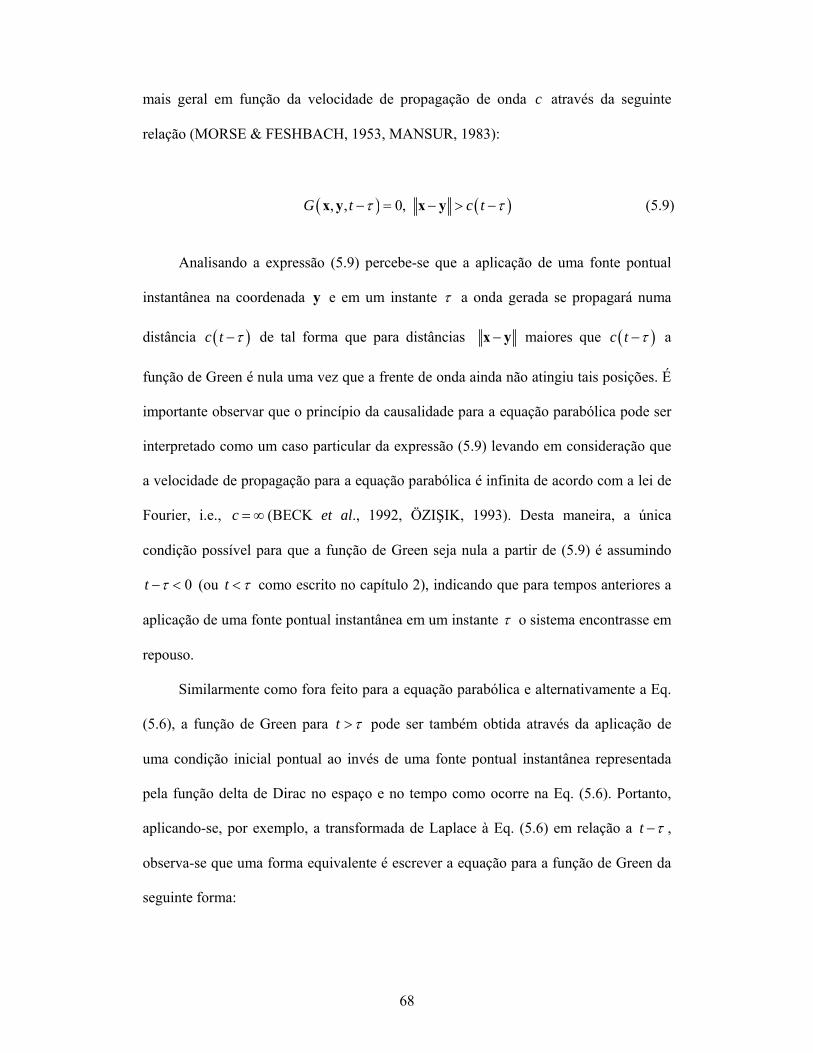
68
mais geral em função da velocidade de propagação de onda c através da seguinte
relação (MORSE & FESHBACH, 1953, MANSUR, 1983):
( ) ( ), , 0,G t c tτ τ− = − > −x y x y (5.9)
Analisando a expressão (5.9) percebe-se que a aplicação de uma fonte pontual
instantânea na coordenada y e em um instante τ a onda gerada se propagará numa
distância ( )c t τ− de tal forma que para distâncias −x y maiores que ( )c t τ− a
função de Green é nula uma vez que a frente de onda ainda não atingiu tais posições. É
importante observar que o princípio da causalidade para a equação parabólica pode ser
interpretado como um caso particular da expressão (5.9) levando em consideração que
a velocidade de propagação para a equação parabólica é infinita de acordo com a lei de
Fourier, i.e., c = ∞ (BECK et al., 1992, ÖZIŞIK, 1993). Desta maneira, a única
condição possível para que a função de Green seja nula a partir de (5.9) é assumindo
0t τ− < (ou t τ< como escrito no capítulo 2), indicando que para tempos anteriores a
aplicação de uma fonte pontual instantânea em um instante τ o sistema encontrasse em
repouso.
Similarmente como fora feito para a equação parabólica e alternativamente a Eq.
(5.6), a função de Green para t τ> pode ser também obtida através da aplicação de
uma condição inicial pontual ao invés de uma fonte pontual instantânea representada
pela função delta de Dirac no espaço e no tempo como ocorre na Eq. (5.6). Portanto,
aplicando-se, por exemplo, a transformada de Laplace à Eq. (5.6) em relação a t τ− ,
observa-se que uma forma equivalente é escrever a equação para a função de Green da
seguinte forma:

69
( )( ) ( ) ( ), , , , , ,k G t G t G tτ ρ τ ς τ∇ ⋅ ∇ − = − + −x y x y x y , ∈Ωx , t τ> (5.10) ( ), , 0G t τ− =x y , 1∈Γx , t τ> (5.11) ( ), , 0k G t τ∇ − ⋅ =x y n , 2∈Γx , t τ> (5.12)
com condições iniciais dadas por:
( ), , 0G t τ− =x y , ∈Ωx , t τ= (5.13)
( ) ( )1, ,G t τ δρ
− = −x y x y , ∈Ωx , t τ= (5.14)
Portanto a fonte pontual instantânea da Eq. (5.6) é substituída por uma condição
inicial pontual na derivada temporal da função de Green representada pela função delta
de Dirac ( )δ −x y , eliminado assim a função delta de Dirac no domínio do tempo
( )tδ τ− .
5.3 Expressão integral do método ExGA
O primeiro passo para se obter a expressão integral do método ExGA é decompor
o campo de deslocamento como ( ) ( ) ( )ˆ, , ,u t u t u t= +x x x tal que ( ) ( )ˆ , ,u t u t=x x em
1Γ para satisfazer exatamente a condição de contorno de Dirichlet. Desta maneira as
Eqs. (5.1)-(5.5) são reescritas da seguinte forma:
( )( ) ( ) ( ) ( ) ( ), , , , ,k u t b t t u t u tψ ρ ς∇⋅ ∇ + + = +x x x x x , ( ), t I∈Ω×x (5.15) ( ), 0u t =x , ( ) 1, t I∈Γ ×x (5.16) ( ) ( )( ) ( )ˆ, , ,k u t u t q t∇ + ⋅ =x x n x , ( ) 2, t I∈Γ ×x (5.17)
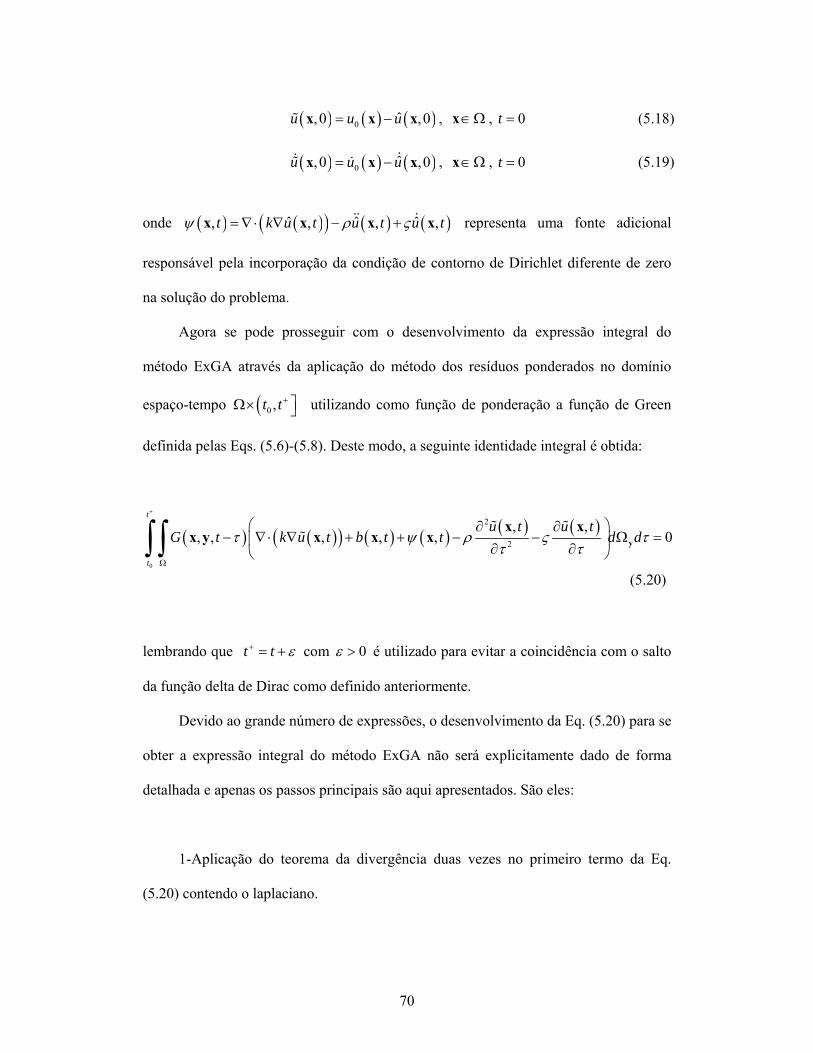
70
( ) ( ) ( )0 ˆ,0 ,0u u u= −x x x , ∈Ωx , 0t = (5.18) ( ) ( ) ( )0 ˆ,0 ,0u u u= −x x x , ∈Ωx , 0t = (5.19)
onde ( ) ( )( ) ( ) ( )ˆ ˆ ˆ, , , ,t k u t u t u tψ ρ ς= ∇ ⋅ ∇ − +x x x x representa uma fonte adicional
responsável pela incorporação da condição de contorno de Dirichlet diferente de zero
na solução do problema.
Agora se pode prosseguir com o desenvolvimento da expressão integral do
método ExGA através da aplicação do método dos resíduos ponderados no domínio
espaço-tempo ( 0 ,t t+ ⎤Ω× ⎦ utilizando como função de ponderação a função de Green
definida pelas Eqs. (5.6)-(5.8). Deste modo, a seguinte identidade integral é obtida:
( ) ( )( ) ( ) ( ) ( ) ( )
0
2
2
, ,, , , , , 0
t
t
u t u tG t k u t b t t d dτ ψ ρ ς τ
τ τ
+
Ω
⎛ ⎞∂ ∂− ∇ ⋅ ∇ + + − − Ω =⎜ ⎟
∂ ∂⎝ ⎠∫∫ y
x xx y x x x
(5.20)
lembrando que t t ε+ = + com 0ε > é utilizado para evitar a coincidência com o salto
da função delta de Dirac como definido anteriormente.
Devido ao grande número de expressões, o desenvolvimento da Eq. (5.20) para se
obter a expressão integral do método ExGA não será explicitamente dado de forma
detalhada e apenas os passos principais são aqui apresentados. São eles:
1-Aplicação do teorema da divergência duas vezes no primeiro termo da Eq.
(5.20) contendo o laplaciano.

71
2- Aplicação do teorema da divergência uma vez no primeiro termo envolvendo a
parcela ( ),ψ τy na Eq. (5.20) que contem o laplaciano devido a condição de contorno
(5.17).
3- Efetuar integração por partes em relação a τ uma vez para a integral que
contem o termo ( ),u ττ
∂∂y
e duas vezes para a integral que contem o termo ( )2
2
,u ττ
∂∂
y
na Eq. (5.20), observando posteriormente que para tτ += tem-se ( ), , 0G t t+− =x y e
( ), , 0G t t+− =x y pelo princípio da causalidade uma vez que
( ) 0t t t t ε ε+− = − + = − < .
4-Utilização da propriedade integral da função delta de Dirac definida no capítulo
2 (Eq. (2.6)) tendo em vista a integral obtida depois de efetuado os passos anteriores e a
Eq. (5.6) e finalmente tomando o limite quando 0ε → resultando em:
( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
0
0
2
2
, , , ,, , ,
, ,
t
t
t
t
G t G tk G t u d d
t u d d u t
τ ττ ς ρ τ τ
τ τ
δ δ τ τ τ
+
+
Ω
Ω
⎛ ⎞∂ − ∂ −∇ ⋅ ∇ − + − Ω =⎜ ⎟
∂ ∂⎝ ⎠
− − − Ω = −
∫∫
∫∫
y
y
x y x yx y y
x y y x
(5.21)
Após a realização de todas essas etapas e levando em consideração as condições
de contorno homogêneas da função de Green (5.7)-(5.8) bem como a condição de
contorno homogênea (5.16), a seguinte expressão integral do método ExGA para a
variável ( ),u tx é obtida (LOUREIRO & MANSUR, 2010):

72
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
0
0 2 0
0
0 0 0
0 0
2
2
, , , , , ,
, , , , , ,
ˆ, , , , , ,
ˆ ,, ,
ˆ ,, ,
t
t
t t
t t
t
t
u t G t t G t t u t d
G t t u t d G t b d d
G t q d d G t k u d d
uG t d d
uG t d d
ς ρ
ρ τ τ τ
τ τ τ τ τ τ
ττ ς τ
τ
ττ ρ τ
τ
+
+ +
+
Ω
Ω Ω
Γ Ω
Ω
Ω
= − + − Ω +
+ − Ω + − Ω
+ − Γ − ∇ − ⋅ ∇ Ω
∂− − Ω
∂
∂− − Ω
∂
∫
∫ ∫∫
∫∫ ∫∫
∫∫
y
y y
y y
y
y
x x y x y y
x y y x y y
x y y x y y
yx y
yx y ( ) (
0
2 0, , ,
t
f
t
t t t
+
⎤∈Ω Γ × ⎦∫∫ x ∪
(5.22)
Analisando a expressão acima, percebe-se que as duas primeiras integrais de
volume são responsáveis pela contribuição das condições iniciais na solução e as
demais integrais do tipo convolutiva contendo tanto integrais de volume quanto de
contorno estão relacionadas a fonte, fluxo prescrito no contorno 2Γ e as contribuições
da condição de contorno de Dirichlet na forma de integrais de volume. Como será
apresentado posteriormente, a derivada do campo de deslocamento ( ),u tx também
será utilizada, sendo obtida derivando a expressão integral (5.22) através da regra de
Leibniz com relação a variável temporal resultando na seguinte expressão:
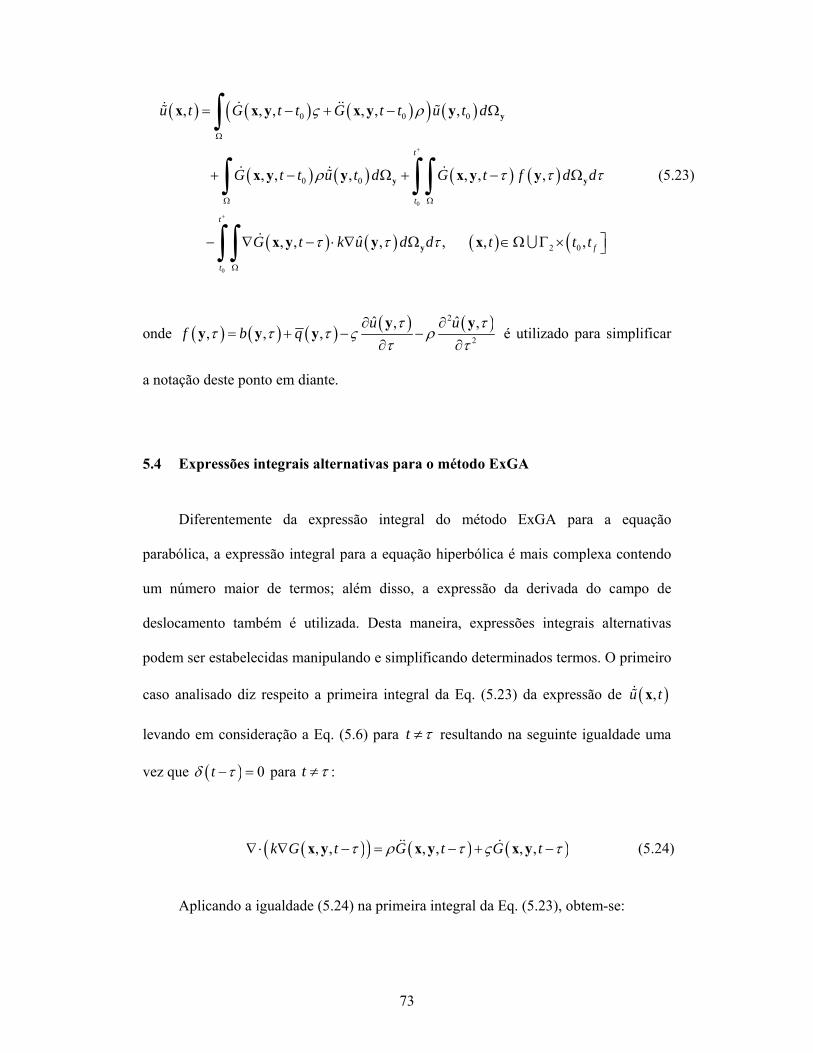
73
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) (
0
0
0 0 0
0 0
2 0
, , , , , ,
, , , , , ,
ˆ, , , , , ,
t
t
t
f
t
u t G t t G t t u t d
G t t u t d G t f d d
G t k u d d t t t
ς ρ
ρ τ τ τ
τ τ τ
+
+
Ω
Ω Ω
Ω
= − + − Ω
+ − Ω + − Ω
⎤− ∇ − ⋅ ∇ Ω ∈Ω Γ × ⎦
∫
∫ ∫∫
∫∫
y
y y
y
x x y x y y
x y y x y y
x y y x ∪
(5.23)
onde ( ) ( ) ( ) ( ) ( )2
2
ˆ ˆ, ,, , ,
u uf b q
τ ττ τ τ ς ρ
τ τ∂ ∂
= + − −∂ ∂y y
y y y é utilizado para simplificar
a notação deste ponto em diante.
5.4 Expressões integrais alternativas para o método ExGA
Diferentemente da expressão integral do método ExGA para a equação
parabólica, a expressão integral para a equação hiperbólica é mais complexa contendo
um número maior de termos; além disso, a expressão da derivada do campo de
deslocamento também é utilizada. Desta maneira, expressões integrais alternativas
podem ser estabelecidas manipulando e simplificando determinados termos. O primeiro
caso analisado diz respeito a primeira integral da Eq. (5.23) da expressão de ( ),u tx
levando em consideração a Eq. (5.6) para t τ≠ resultando na seguinte igualdade uma
vez que ( ) 0tδ τ− = para t τ≠ :
( )( ) ( ) ( ), , , , , ,k G t G t G tτ ρ τ ς τ∇ ⋅ ∇ − = − + −x y x y x y (5.24)
Aplicando a igualdade (5.24) na primeira integral da Eq. (5.23), obtem-se:

74
( ) ( )( ) ( ) ( )( ) ( )0 0 0 0 0, , , , , , , ,G t t G t t u t d k G t t u t dς ρΩ Ω
− + − Ω = ∇⋅ ∇ − Ω∫ ∫y yx y x y y x y y (5.25)
Como observado na igualdade (5.25), a integral do lado direito contém termos
envolvendo derivadas segunda com relação a variável espacial e, portanto, objetivando
diminuir a ordem dessas derivadas o teorema da divergência pode ser aplicado
resultando em:
( )( ) ( ) ( ) ( )
( ) ( )
( ) ( )
1
2
0 0 0 0
0 0
0 0
, , , , , ,
, , ,
, , ,
k G t t u t d k G t t u t d
k G t t u t d
k G t t u t d
Ω Ω
Γ
Γ
∇ ⋅ ∇ − Ω = − ∇ − ⋅∇ Ω +
∇ − ⋅ Ω +
∇ − ⋅ Ω
∫ ∫∫∫
y y
y
y
x y y x y y
x y n y
x y n y
(5.26)
Observando que ( )0, 0u t =y em 1Γ da condição de contorno (5.16) e que
( )0, , 0k G t t∇ − =x y em 2Γ da condição de contorno (5.8) as integrais de contorno de
(5.26) se anulam e, portanto, a expressão integral para ( ),u tx dada pela Eq. (5.23)
levando em consideração (5.26) pode ser reescrita como:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )0 0
0 0 0, , , , , , ,
ˆ, , , , , ,
t t
t t
u t k G t u t d G t t u t d
G t f d d G t k u d d
τ ρ
τ τ τ τ τ τ
+ +
Ω Ω
Ω Ω
= − ∇ − ⋅∇ Ω + − Ω +
− Ω − ∇ − ⋅ ∇ Ω
∫ ∫
∫∫ ∫∫
y y
y y
x x y y x y y
x y y x y y
(5.27)
Portanto, a integral de volume contendo a condição inicial ( )0,u ty e envolvendo
a primeira e segunda derivada da função de Green com relação a variável temporal na

75
expressão integral original (5.23) é substituída por uma integral de volume dada pelo
gradiente tanto da função de Green quanto da condição inicial ( )0,u ty de acordo com
(5.27).
Outra manipulação, não tão trivial como a anterior, consiste em reescrever a
primeira integral da expressão (5.22) da seguinte maneira:
( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( )
0 0 0
0 0 0 0 0
, , , , ,
, , , , , , , ,
G t t G t t u t d
G t t G t t u t d H t t u t d
ς ρ
ς ρ ρρ
Ω
Ω Ω
− + − Ω =
⎛ ⎞− + − Ω = − Ω⎜ ⎟
⎝ ⎠
∫∫ ∫
y
y y
x y x y y
x y x y y x y y(5.28)
onde ( ), ,H t τ−x y é uma função denominada de função "Degrau" em referência a
terminologia "step response" (CLOUGH & PENZIEN, 1993) e de acordo com a
Eq.(5.28) sua expressão é dada como:
( ) ( ) ( ), , , , , ,H t G t G tςτ τ τρ
− = − + −x y x y x y (5.29)
Observa-se que a função Degrau é uma combinação linear da função de Green e
de sua derivada temporal. Portanto, levando em consideração a equação (5.6) da função
de Green e a Eq. (5.29), a seguinte superposição pode ser estabelecida:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
, , , , , ,
, , , , , ,
k G t t G t G t
G t G t G tk t
t t t
ς ς ς ςτ δ δ τ ρ τ ς τρ ρ ρ ρ
τ τ τδ δ τ ρ ς
⎧ ⎛ ⎞∇ ⋅ ∇ − + − − = − + −⎪ ⎜ ⎟
⎝ ⎠⎪ +⎨∂ − ∂ − ∂ −⎛ ⎞⎪∇ ⋅ ∇ + − − = +⎜ ⎟⎪ ∂ ∂ ∂⎝ ⎠⎩
x y x y x y x y
x y x y x yx y
(5.30)

76
Efetuando a soma dos termos de (5.30) e escrevendo a equação resultante em
relação a função Degrau tendo em vista a igualdade (5.29), a seguinte equação
diferencial é encontrada para a função Degrau:
( )( ) ( ) ( ) ( ) ( )
( ) ( )
, ,
, , , ,
k H t t t
H t H t
ςτ δ δ τ δ δ τρ
ρ τ ς τ
∇ ⋅ ∇ − + − − + − − =
− + −
x y x y x y
x y x y, ( ), t I∈Ω×x (5.31)
De forma análoga as condições de contorno são escritas como:
( ), , 0H t τ− =x y , ( ) 1, t I∈Γ ×x (5.32) ( ), , 0k H t τ∇ − ⋅ =x y n , ( ) 2, t I∈Γ ×x (5.33)
Diferentemente da equação para a função de Green, a equação para função
Degrau consiste numa fonte pontual instantânea acrescida de uma fonte pontual
multiplicada pela derivada temporal da função delta de Dirac. Alternativamente a Eq.
(5.31), as funções delta de Dirac no domínio temporal podem ser eliminadas através da
aplicação da transformada de Laplace na Eq. (5.31) assim como fora feito na equação
para a equação da função de Green resultando nas Eqs. (5.10)-(5.14). Desta maneira
outra interpretação para a função de Degrau para t τ> consiste na aplicação de uma
condição inicial pontual representada pela função delta de Dirac ( )δ −x y sob nenhuma
outra perturbação, ou seja, a equação, condições de contorno e condições iniciais para a
função Degrau são reescritas como:
( )( ) ( ) ( ), , , , , ,k H t H t H tτ ρ τ ς τ∇ ⋅ ∇ − = − + −x y x y x y , ( ), t I∈Ω×x (5.34) ( ), , 0H t τ− =x y , ( ) 1, t I∈Γ ×x (5.35)
77
( ), , 0k H t τ∇ − ⋅ =x y n , ( ) 2, t I∈Γ ×x (5.36)
( ) ( )1, ,H t τ δρ
− = −x y x y , ∈Ωx , t τ= (5.37)
( ), , 0H t τ− =x y , ∈Ωx , t τ= (5.38)
Claramente a diferença entre a função de Green e a função Degrau a partir das
Eqs. (5.10)-(5.14) e Eqs. (5.34)-(5.38), respectivamente está relacionada a aplicação da
fonte pontual representada pela função delta de Dirac ( )δ −x y nas condições iniciais.
A função de Green pode ser interpretada como a resposta do sistema devido a uma
condição inicial de velocidade pontual enquanto que para a função Degrau como a
resposta devido a uma condição inicial de deslocamento pontual.
Finalmente a expressão integral (5.22) levando em consideração a função Degrau
bem como sua derivada temporal podem ser escritas, respectivamente, como:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )0 0
0 0 0 0, , , , , , ,
ˆ, , , , , ,
t t
t t
u t H t t u t d G t t u t d
G t f d d G t k u d d
ρ ρ
τ τ τ τ τ τ
+ +
Ω Ω
Ω Ω
= − Ω + − Ω +
− Ω − ∇ − ⋅ ∇ Ω
∫ ∫
∫∫ ∫∫
y y
y y
x x y y x y y
x y y x y y
(5.39)
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )0 0
0 0 0 0, , , , , , ,
ˆ, , , , , ,
t t
t t
u t H t t u t d G t t u t d
G t f d d G t k u d d
ρ ρ
τ τ τ τ τ τ
+ +
Ω Ω
Ω Ω
= − Ω + − Ω +
− Ω − ∇ − ⋅ ∇ Ω
∫ ∫
∫∫ ∫∫
y y
y y
x x y y x y y
x y y x y y
(5.40)
É importante ressaltar que todas as expressões integrais apresentadas nesta seção
são matematicamente equivalentes no sentido que a resposta final de todas elas é única,
uma vez utilizada expressões analíticas para as funções de Green e Degrau.

78
5.5 Condição de contorno não-reflexiva
Modelagem de problemas considerando domínios infinitos aparece com grande
freqüência em aplicações práticas dentro da ciência e engenharia como, por exemplo,
nas áreas da acústica e da geofísica. Desta maneira é importante desenvolver
ferramentas computacionais capazes de lidar com domínios infinitos de forma eficiente.
Para problemas escalares, a condição de radiação no infinito de Sommerfeld que
estabelece que não haja reflexão de ondas no infinito pode ser utilizada para descrever
o fenômeno de propagação de ondas em domínios infinitos; sua expressão no domínio
do tempo é dada por (COURANT & HILBERT, 1962, GIVOLI, 1991):
( ) ( ) ( )1 /2
.
, ,1lim 0d
rr ct const
u t u tr
r c t−
→∞+ =
∂ ∂⎛ ⎞+ =⎜ ⎟∂ ∂⎝ ⎠
x x (5.41)
onde r é a coordenada radial e d a dimensão espacial.
Na prática, em muitas metodologias numéricas, deve-se truncar o domínio
infinito através de um contorno fictício denominado nesta tese como ABCΓ e impor uma
determinada condição de contorno prescrita para que o problema tenha solução única
no domínio truncado e finito dΩ⊂ e com contorno, incluindo ABCΓ , dado por
1 2 ABCΓ = Γ Γ Γ∪ ∪ tal que 1 2 1 2ABC ABCΓ Γ = Γ Γ = Γ Γ =∅∩ ∩ ∩ . Dentre as várias
condições de contorno não-reflexivas existentes na literatura (AINSWORTH et al.,
2003, GIVOLI, 1991) para representar domínios infinitos, pode-se destacar as
condições de contorno de Higdon de ordem m dada por (HIGDON, 1986):
79
( )1
cos , 0m
j
j
c u tt n
α=
⎡ ⎤∂ ∂⎛ ⎞⎢ ⎥+ =⎜ ⎟⎢ ⎥∂ ∂⎝ ⎠⎣ ⎦∏ x , ( ), ABCt I∈Γ ×x (5.42)
onde jα são os m diferentes ângulos de incidência das frentes de onda que atingem o
contorno ABCΓ .
Embora a condição de contorno (5.42) possa ser considerada exata com
coeficiente de reflexão nulo do ponto de vista teórico, os seguintes problemas são
observados na prática (AINSWORTH et al., 2003): (i) problemas de estabilidade
surgem quando se aumenta a ordem m ; (ii) as derivadas tanto espaciais quanto
temporais de ordem superior a medida que se aumenta o valor da ordem m são
bastante complicadas de serem calculadas e implementadas nas formulações numéricas
de discretização empregadas (e.g. elementos finitos, diferenças finitas, etc.) e (iii) os
ângulos de incidência não são conhecidos de uma forma geral e estimativas devem ser
empregadas. Tendo em vista tais limitações e visando uma fácil implementação
computacional, a seguinte condição de contorno não reflexiva obtida assumindo 1m =
e 0α = em (5.42) também conhecida como condição de “Sommerfeld” unidirecional é
considerada (ENGQUIST & MAJDA, 1979):
( ) ( )1, , 0u uc
τ τ∇ ⋅ + =x n x , ( ), ABCt I∈Γ ×x (5.43)
Uma vez selecionada a condição de contorno não reflexiva a ser utilizada, deve-
se obter sua versão homogênea para a função de Green empregada no método ExGA.
Portanto, a seguinte condição de contorno não reflexiva é aplicada no contorno ABCΓ
para o cálculo da função de Green:

80
( ) ( )1, , , , 0G t G tc
τ τ∇ − ⋅ + − =x y n x y , ( ), ABCt I∈Γ ×x (5.44)
Será apresentado agora a implementação da condição de contorno não reflexiva
(5.43) no método ExGA. Analisando a Eq. (5.43) nota-se claramente a similaridade
com a condição de contorno de Neumman. Portanto a condição de contorno (5.43) é
introduzida naturalmente quando se aplica o teorema da divergência correspondente ao
passo 1 descrito anteriormente para a obtenção da expressão integral do método ExGA.
Desta maneira, a seguinte integral de contorno é estabelecida depois de aplicado o
teorema da divergência e levando em consideração posteriormente a Eq. (5.43)
(observe que por motivos de simplificações apenas a integral de contorno em ABCΓ é
apresentada):
( ) ( ) ( ) ( )0 0
,, , , , ,
ABC ABC
t t
t t
ukk u G t d d G t d dc
ττ τ τ τ τ
τ
+ +
Γ Γ
∂∇ ⋅ − Γ = − − Γ
∂∫ ∫ ∫ ∫y y
yy n x y x y (5.45)
Analogamente, depois de efetuado a segunda aplicação do teorema da
divergência referente ao passo 1 e observando que ( ) ( ), ,, ,
G tG t
ττ
τ∂ −
− = −∂
x yx y , a
seguinte integral levando em consideração a condição de contorno para a função de
Green (5.44) é obtida:
( ) ( ) ( ) ( )
0 0
, ,, , , ,
ABC ABC
t t
t t
G tkku G t d d u d dc
ττ τ τ τ τ
τ
+ +
Γ Γ
∂ −− ∇ − ⋅ Γ = − Γ
∂∫ ∫ ∫ ∫y y
x yy x y n y (5.46)

81
A principal diferença entre a implementação da condição de Neumman e da
condição não reflexiva se da pelo fato que na primeira obtem-se uma integral de
convolução relativo ao fluxo prescrito ( ),q τy enquanto que na última obtem-se uma
integral de convolução que contém o termo não conhecido ( ),u ττ
∂∂y
como observado
em (5.45). Além disso, para a condição de Neumman a integral de convolução (5.46) se
anula, pois ( ), , 0k G t τ∇ − ⋅ =x y n em 2Γ o que não acontece para a condição não
reflexiva, onde se tem ( ) ( ), ,1, ,G t
G tc
ττ
τ∂ −
∇ − ⋅ =∂
x yx y n em ABCΓ de acordo com
(5.44) resultando na integral (5.46). Logo, com o objetivo de eliminar as integrais de
convolução (5.45) e (5.46), integração por partes é efetuada na integral (5.45) devido ao
termo ( ),u ττ
∂∂y
, resultando na seguinte expressão lembrando que ( ), , 0G t τ− =x y
para tτ += devido ao princípio da causalidade:
( ) ( ) ( ) ( )
( ) ( )
0
0
0 0
,, , , , ,
, ,,
ABC ABC
ABC
t
t
t
t
uk kG t d d G t t u t dc c
G tk u d dc
ττ τ
τ
ττ τ
τ
+
+
Γ Γ
Γ
∂− − Γ = − Γ +
∂
∂ −Γ
∂
∫ ∫ ∫
∫ ∫
y y
y
yx y x y y
x yy
(5.47)
Como as expressões (5.46) e (5.47) aparecem somadas na expressão final, as
integrais de convolução do lado direito das Eqs. (5.46) e (5.47) se anulam e, portanto, a
expressão integral final do método ExGA considerando a condição de contorno não
reflexiva (5.43) pode ser escrita como:
82
( ) ( ) ( )( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
0
0
0 0 0
0 0
0 0
, , , , , ,
, , ,
, , , , , ,
ˆ, , ,
ABC
t
t
t
t
u t G t t G t t u t d
kG t t u t dc
G t t u t d G t f d d
G t k u d d
ς ρ
ρ τ τ τ
τ τ τ
+
+
Ω
Γ
Ω Ω
Ω
= − + − Ω +
− Γ
+ − Ω + − Ω
− ∇ − ⋅ ∇ Ω
∫∫
∫ ∫∫
∫∫
y
y
y y
y
x x y x y y
x y y
x y y x y y
x y y
(5.48)
Como observado na Eq. (5.48) e comparativamente a expressão integral original
(5.22), a utilização da condição de contorno não reflexiva (5.43) resulta numa integral
de contorno em ABCΓ adicional (segunda integral de (5.48)) que se assemelha a integral
de volume que contém o fator de amortecimento ς . Portanto, essas duas integrais
podem ser somadas em um único termo, gerando uma única matriz de amortecimento
depois de efetuado o processo de semi-discretização como será descrito na próxima
seção.
Como discutido anteriormente, a condição de contorno não reflexiva (5.43) é
bastante simples e exata somente para ondas que se propagam numa linha normal ao
contorno (i.e., com ângulo de incidência 0α = ), resultando em reflexões espúrias de
pequena amplitude para ondas que atingem o contorno com ângulos de incidência
0α ≠ uma vez que a condição de contorno não consegue absorver toda a energia.
Apesar da condição de contorno não-reflexiva (5.43) não ser exata para um caso geral
contendo diferentes frentes de onda, sua fácil implementação computacional a torna
largamente utilizada na literatura. Com o objetivo de atenuar as reflexões geradas pela
condição de contorno (5.43) em um caso geral sem comprometer a fácil implementação
computacional, pesquisadores propuseram acrescentar camadas de amortecimento para
83
posteriormente aplicar a condição de contorno (5.43), ou seja, o domínio truncado Ω
utilizado anteriormente é aumentado através de camadas de amortecimento
representadas pelo domínio *Ω tal que *Ω Ω =∅∩ com o novo domínio sendo
representado por *Ω Ω∪ .
No domínio *Ω deve-se aplicar uma função para o fator de amortecimento ( )ς x
com *∈Ωx . Obviamente, do ponto de vista teórico, a função precisa ser suave o
suficiente, ou seja, a transição do fator de amortecimento nulo em Ω para um valor
máximo no contorno ABCΓ agora de *Ω deve ser gradual para que não haja reflexões
entre as camadas devido a grandes diferenças de taxa de amortecimento. A literatura
propõe vários tipos de funções considerando diferentes metodologias, o leitor é
indicado a explorar, por exemplo, as referências GIVOLI (1991), SARMA et al.
(1998), LIU & QUEK JERRY (2003) e SEMBLAT et al. (2010) para uma melhor
compreensão dos valores para ( )ς x nas camadas de amortecimento, observando que
uma função ótima que resulte em um coeficiente de reflexão nulo está ainda para ser
desenvolvida.
É importante ressaltar que outras técnicas para a solução numérica de problemas
com domínios infinitos são frequentemente utilizadas. Entre essas técnicas podem-se
destacar os elementos infinitos e PML (“Perfectly Matched Layer”). Na utilização de
elementos infinitos não existe um contorno truncado ABCΓ nem o uso de condições não
reflexivas e sim um domínio discretizado normalmente por elementos finitos e outro
que se estende para o infinito sendo representado por elementos infinitos cujas funções
de interpolação precisam ser corretamente selecionadas para representar de forma
satisfatória o comportamento da solução na transição entre o domínio finito e infinito
para que não haja reflexões espúrias (ASTLEY, 1996, ASTLEY et al., 1998). Já a

84
técnica PML (COLLINO & MONK, 1998) pode ser considerada uma evolução mais
sofisticada das camadas de amortecimento anteriormente descrito com a diferença
principal que no desenvolvimento da técnica PML assume-se a priori que não haja
reflexões na interface do domínio Ω e *Ω para ondas com qualquer ângulo de
incidência (geralmente o domínio estendido *Ω para as camadas de amortecimento é
maior que o domínio estendido *Ω para a técnica PML). Embora grandes avanços
tenham sido alcançados para a modelagem de problemas no domínio da freqüência
considerando elementos infinitos e PMLs, suas versões no domínio do tempo ainda
precisam ser melhor desenvolvidas visando uma maior robustez e generalidade. As
vantagens e desvantagens dessas duas técnicas podem ser encontradas em detalhes nas
seguintes referências: ASTLEY (1996), ASTLEY et al. (1998), AINSWORTH et al.
(2003), COLLINO & MONK (1998), DIAZ & JOLY (2006).
5.6 Discretização espacial e procedimento de marcha no tempo
Uma vez apresentadas as expressões integrais do método ExGA, pode-se
proceder com a discretização espacial da expressão integral. Portanto, discretizando o
domínio Ω = Ω Γ∪ em nel elementos não sobrepostos, i.e.,
1 1
nel nelh e e e
e e= =Ω = Ω = Ω = Ω Γ∪ ∪ ∪ tal que m n
m n∀ ≠Ω Ω =∅∩ , as aproximações para ( ),u τy ,
( )ˆ ,u τy e ( ), ,G t τ−x y considerando o processo de semi-discretização onde as
variáveis espacial e temporal são tratadas de forma independentes assim como fora
feito no capítulo 2 são:
( ) ( ) ( )1
,hl l
l
u N uη η
τ τΓ∈ −
= ∑y y (5.49)

85
( ) ( ) ( )1
ˆ ,hl l
l
u N uη
τ τΓ∈
=∑y y (5.50)
( ) ( ) ( )1
, ,hk j kj
j
G t N G tη η
τ τΓ∈ −
− = −∑x y y (5.51)
lembrando que ( )lu τ e ( )kjG t τ− são os valores nodais a serem calculados e que
( )lu τ os valores nodais prescritos na condição de contorno de Dirichlet em 1hΓ , onde
1ηΓ é o conjunto de pontos nodais pertencentes a 1
hΓ e η o conjunto de todos os pontos
nodais da malha adotada.
Substituindo as Eqs. (5.49)-(5.51) na expressão integral (5.22), os valores
nodais de deslocamento ( )ku t no domínio do tempo são calculados através da seguinte
expressão integral semi-discreta (LOUREIRO & MANSUR, 2010) (as demais
expressões integrais semi-discretas para as Eqs. (5.23), (5.27), (5.39), (5.40) e (5.48)
são obtidas de forma análoga):

86
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
2
0 02
0 0 0
1 1
0 0
1
1 1
, ,
e e
e
e e
nel nel
e e e ek kj j l kj j l l
e e
nel
e ekj j l l
e
t tnel nel
e ekj j kj j
e et t
ekj j
u t G t t N N d G t t N N d u t
G t t N N d u t
G t N q d d G t N b d d
G t N k
ς ρ
ρ
τ τ τ τ τ τ
τ
= =Ω Ω
= Ω
= =Γ Ω
⎛ ⎞⎜ ⎟= − Ω + − Ω +⎜ ⎟⎜ ⎟⎝ ⎠
− Ω +
− Γ + − Ω −
− ∇ ⋅
∑ ∑∫ ∫
∑∫
∑ ∑∫ ∫ ∫ ∫
y y
y
y y
y y y y
y y
y y y y
y ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
0
1
0
1
0
1
1
2
2
1
e
e
e
t nel
el l
et
t nel
le ekj j l
et
t nel
le ekj j l
et
N d u d
uG t N N d d
uG t N N d d
τ τ
ττ ς τ
τ
ττ ρ τ
τ
= Ω
= Ω
= Ω
∇ Ω −
∂− Ω −
∂
∂− Ω
∂
∑∫ ∫
∑∫ ∫
∑∫ ∫
y
y
y
y
y y
y y
(5.52)
onde 2nel , 1nel representam o número de elementos adjacentes ao contorno 2hΓ e 1
hΓ ,
respectivamente. A expressão integral acima pode ser reescrita em forma matricial e de
forma mais compacta como:
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) (0
0 0 0 0 0
0, ,
t
f
t
t t t t t t t t t
t d t t tτ τ τ
= − + − + − +
⎤− ∈ ⎦∫
U G C G M U G MU
G F (5.53)
na qual as matrizes eq eqn n×∈M e eq eqn n×∈C e o vetor : eqnI →F denominados,
respectivamente, de matriz massa, amortecimento e vetor força são claramente
definidos a partir da Eq. (5.52).

87
O cálculo do vetor deslocamento : eqnI →U ao longo do tempo é efetuado
através de um procedimento de marcha no tempo, onde a solução em um determinado
passo de tempo é computado a partir da solução conhecida de um passo de tempo
anterior. Desta maneira, o tempo de análise 0, ft⎡ ⎤⎣ ⎦ deve ser dividido em N intervalos
menores de tempos igualmente espaçados, i.e., [ ]1
10
0, ,N
f k kk
t t t−
+=
⎡ ⎤ =⎣ ⎦ ∪ com
0 10 N ft t t t= < < < =… , 1 /k k ft t t t N+Δ = − = , kt k t= Δ e ( )1 1kt k t+ = + Δ . Como visto
tanto o vetor deslocamento quanto sua derivada temporal aparecem na Eq. (5.53) e,
portanto, para se realizar um procedimento de marcha no tempo a expressão para o
vetor ( )tU deve ser também utilizada em conjunto com a expressão do vetor ( )tU ,
ambas escritas numa forma recursiva assumindo 0 kt t= e 1kt t += . Como discutido
anteriormente, o método ExGA para a equação hiperbólica possui diferentes expressões
equivalentes para o deslocamento e sua derivada temporal. Desta maneira, a marcha no
tempo pode ser classificada em três procedimentos de expressões recursivas, são eles:
• Procedimento A: vetor deslocamento e sua derivada temporal obtidos a
partir das Eqs. (5.22)-(5.23), respectivamente.
( ) ( )( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( ) ( )
1
0
1
0
t
k k kk
t
k k kk
t t t t t d
t t t t t d
τ τ τ
τ τ τ
Δ
+
Δ
+
= Δ + Δ + Δ + Δ − +
= Δ + Δ + Δ + Δ − +
∫
∫
U G C G M U G MU G F
U G C G M U G MU G F
(5.54)

88
• Procedimento B: vetor deslocamento e sua derivada temporal obtidos a
partir das Eqs. (5.22) e (5.27), respectivamente.
( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
0
1
0
t
k k kk
t
k k kk
t t t t t d
t t t t d
τ τ τ
τ τ τ
Δ
+
Δ
+
= Δ + Δ + Δ + Δ − +
= − Δ + Δ + Δ − +
∫
∫
U G C G M U G MU G F
U G KU G MU G F
(5.55)
• Procedimento C: vetor deslocamento e sua derivada temporal obtidos a
partir das Eqs. (5.39)-(5.40), respectivamente.
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
0
1
0
t
k k kk
t
k k kk
t t t t d
t t t t d
τ τ τ
τ τ τ
Δ
+
Δ
+
= Δ + Δ + Δ − +
= Δ + Δ + Δ − +
∫
∫
U H MU G MU G F
U H MU G MU G F
(5.56)
onde ( )tΔG , ( )tΔG , ( )tΔG e ( )tΔH , ( )tΔH são as matrizes de Green e Degrau e
suas derivadas temporais no instante de tempo t t= Δ , respectivamente. Observe que as
duas principais vantagens da utilização de um procedimento de marcha no tempo são
que as matrizes de Green e/ou Degrau precisam ser computadas apenas em t t= Δ e que
as integrais de convolução são calculadas uma única vez no intervalo de tempo [ ]0, tΔ ,
estabelecendo, portanto, algoritmos de integração temporal eficientes.
Embora os procedimentos de marcha no tempo sejam equivalentes do ponto de
vista analítico, quando as matrizes de Green e Degrau são computadas através de um

89
método numérico, as respostas obtidas pelos procedimentos A, B e C podem ser
numericamente diferentes como mostrado por LOUREIRO (2007). A utilização de um
determinado procedimento de marcha no tempo está diretamente relacionado a
metodologia numérica empregada para o cálculo da matriz de Green e/ou Degrau. De
uma maneira geral as seguintes características e recomendações podem ser atribuídas
aos diferentes procedimentos de marcha no tempo:
- Procedimento A: Observa-se claramente que as matrizes ( )tΔG , ( )tΔG e
( )tΔG precisam ser computadas neste procedimento, sendo recomendado
principalmente quando métodos explícitos de integração temporal são utilizados. Desta
maneira a matriz de massa M e em geral a matriz amortecimento C podem ser
consideradas como diagonal, resultando numa expressão recursiva (i.e., cálculo de
1k+U e 1k+U ) bastante eficiente computacionalmente. Entretanto, como estudado por
LOUREIRO (2007), a matriz ( )tΔG pode gerar uma perda de precisão e estabilidade
nos resultados quando computadas por alguns tipos de métodos de integração temporal
(e.g., diferença central, HHT-α , Bossak-α ), sendo uma desvantagem para a utilização
de tal procedimento de marcha no tempo.
- Procedimento B: Para contornar a perda de precisão e estabilidade do
procedimento de marcha no tempo A devido ao cálculo numérico de ( )tΔG , este
procedimento de marcha no tempo elimina tal matriz sendo necessário apenas o cálculo
das matrizes ( )tΔG e ( )tΔG . Logo, resultados mais precisos e estáveis podem ser
obtidos para alguns tipos de métodos de integração temporal (e.g., HHT-α , Bossak-
α ). Além disso, este procedimento de marcha no tempo é também recomendado
90
quando as matrizes de Green são computadas por metodologias baseadas em domínios
transformados, e.g., Laplace e Fourier (SOARES & MANSUR, 2003, 2005,
LOUREIRO et al., 2009a, LOUREIRO & MANSUR, 2009d). A razão para tal
recomendação se da pelo fato que o cálculo das matrizes de Green por intermédio de
domínios transformados é feito de forma independente, eliminando, portanto, o custo
computacional do cálculo da matriz adicional ( )tΔG .
- Procedimento C: Este procedimento tem como principal vantagem a melhoria
da precisão e estabilidade de uma maneira geral, ou seja, para alguns métodos de
integração temporal (e.g., diferença central, HHT-α , Bossak-α ) resultados mais
precisos e estáveis que os procedimentos de marcha anteriores são obtidos. Outra
característica é que a matriz amortecimento C não aparece explicitamente, sendo
incorporada implicitamente através das matrizes de Green e Degrau. Entretanto, a
desvantagem de tal procedimento se da pelo fato que além das matrizes de Green
( )tΔG e ( )tΔG as matrizes Degrau ( )tΔH e ( )tΔH também precisam ser
computadas, aumentando o custo computacional. Para evitar esse custo computacional
extra, SOARES (2011) propôs recentimente uma técnica baseada em pseudo-forças
para a incorporação das condições iniciais.
Uma vez que a comparação entre os três procedimentos de marcha no tempo não
é foco desta tese, apenas o procedimento A será utilizado. A comparação e utilização
dos três procedimentos podem ser encontradas de forma detalhada em LOUREIRO
(2007), MANSUR et al. (2007), LOUREIRO & MANSUR (2009d).
91
6 Cálculo Numérico da Função de Green Através de Subdomínios
Capítulo 6 Cálculo Numérico da Função de Green Através de Subdomínios 6.1 Introdução
O presente capítulo tem por objetivo explorar o princípio da causalidade da
equação hiperbólica para efetuar o cálculo da função de Green. Como discutido
anteriormente o procedimento de marcha no tempo do método ExGA requer o cálculo
das funções de Green para tempos menores e iguais a tΔ . Portanto, para intervalos de
tempo pequenos, a função de Green possui valores diferentes de zero somente numa
região em torno da fonte pontual instantânea (observe que do ponto de vista teórico tal
característica não ocorre em problemas parabólicos de condução de calor, pois se
assume velocidade infinita de acordo com a lei de Fourier). Desta maneira,
subdomínios podem ser utilizados para o cálculo da função de Green de forma local,
estabelecendo uma metodologia mais eficiente computacionalmente denominada
LExGA (“Local Explicit Green’s Approach”). Assim como fora feito para a equação
parabólica, a função de Green é computada numericamente utilizando um
procedimento de semi-discretização com elementos finitos sendo aplicado no espaço e
o método-θ com subpassos de tempo no tempo. Devido ao procedimento de semi-
92
discretização, o princípio da causalidade não é totalmente satisfeito ocasionando em um
subdomínio discreto maior comparativamente ao subdomínio real previsto pelo
princípio da causalidade. Aqui, um novo critério robusto para a determinação do
tamanho exato do subdomínio discreto é proposto.
6.2 Conceitos matemáticos sobre os subdomínios
Devido ao princípio da causalidade torna-se natural calcular a função de Green
somente na região onde a mesma é diferente de zero através da utilização de
subdomínios. Para isso, define-se como sendo jsΩ um subdomínio qualquer vizinho a
uma fonte pontual instantânea aplicada na coordenada jy (ponto fonte) tal que
jsΩ ⊂ Ω como esquematizado na Figura 5. Como serão esclarecidos nas seções
subseqüentes, os pontos fonte ( )1, ,j eqj n=y … na verdade correspondem aos pontos
nodais da malha de elementos finitos excluindo é claro os pontos nodais pertencentes
ao contorno 1hΓ , i.e.,
1j η ηΓ∈ − . Matematicamente, o tamanho do subdomínio
jsΩ a
ser utilizado considerando um tempo de análise t tτ− = Δ tal que ( ), , 0G t τ− ≠x y
pode ser definido a partir do princípio da causalidade como:
{ }, :j
ds j j c tΩ = ∈ − ≤ Δx y x y (6.1)
onde ( )c c= x representa a velocidade do meio relativa ao subdomínio.
Além dos subdomínios jsΩ é necessário definir os contornos
j js sΓ = ∂Ω de tais
subdomínios levando em consideração todas as combinações possíveis tendo em vista o

93
contorno original 1 2Γ = Γ Γ∪ . Desta maneira, analisando a Figura 5 percebe-se que em
um caso geral o contorno pode ser particionado como 1 2j j j js s s siΓ = Γ Γ Γ∪ ∪ tal que
1 2 1 2j j j j j js s s si s siΓ Γ = Γ Γ = Γ Γ =∅∩ ∩ ∩ , onde 1 1j js sΓ = Γ Γ∩ é a interseção do
contorno do subdomínio com o contorno original 1Γ , 2 2j js sΓ = Γ Γ∩ a interseção do
contorno do subdomínio com o contorno original 2Γ e jsiΓ o contorno interno do
subdomínio.
A equação para a função de Green bem como suas condições de contorno (Eqs.
(5.6)-(5.8)) precisam ser definidas considerando o novo subdomínio jsΩ com contorno
jsΓ , i.e. (observe que o mesmo procedimento também deve ser utilizado nas Eqs.
(5.10)-(5.14) para a interpretação alternativa da função de Green):
Figura 5. Representação dos subdomínios jsΩ perturbados após um passo de tempo pela
fonte pontual instantânea aplicada em jy .
Ω
2
Ωsj
1
sij= sj
yj
yj
yj
Ωsj
Ωsj
sij
s2j = sj… 2
s1j = sj… 1
sij
s2j = sj… 2

94
( )( ) ( ) ( ) ( ) ( ), , , , , ,k G t t G t G tτ δ δ τ ρ τ ς τ∇ ⋅ ∇ − + − − = − + −x y x y x y x yjs∈Ωx , t τ> (6.2)
( ), , 0G t τ− =x y , 1 j js si∈Γ Γx ∪ , t τ> (6.3) ( ), , 0k G t τ∇ − ⋅ =x y n , 2 js∈Γx , t τ> (6.4)
Diferentemente da definição para a função de Green utilizada nesta tese que
considera condições de contorno homogêneas do problema original, a introdução de
subdomínios cria um contorno fictício interno denominado jsiΓ . Portanto, deve-se
especificar uma condição de contorno homogêneo em tal contorno, sendo uma escolha
natural adotar a função de Green como sendo zero (condição de Dirichlet) como
definido na Eq. (6.3). Como será discutido mais adiante o sucesso do uso de
subdomínios está diretamente relacionado ao tamanho do intervalo de tempo e ao tipo
de problema analisado.
6.3 Discretização espacial e temporal
Devido ao uso dos subdomínios é importante redefinir a discretização espacial
para cada subdomínio uma vez que ao invés da malha global, será utilizada uma
submalha para cada subdomínio, i.e., a malha global é truncada em torno do ponto
fonte para capturar somente os valores diferentes de zero da função de Green. Sendo
( )1
1, ,s j
j s j
nelh e
s eqe
j n=
Ω = Ω = Ω =∪ … tal que m n
m n∀ ≠Ω Ω =∅∩ a discretização dos
subdomínios em ( )1, ,js eqnel j n= … elementos associados a cada submalha e seja
{ } ( )1, 2, , 1, ,j js s eqn j nη = =… … o conjunto de pontos nodais de cada submalha de

95
elementos finitos com 1s si jj j sη ηΓ Γ ⊂∪
sendo o subconjunto contendo os pontos nodais no
contorno 1 j js siΓ Γ∪ , a aproximação para a função de Green bem como a função peso
utilizada aplicando as definições apresentadas no capítulo 2 sobre os espaços de
elementos finitos htS e hV são dadas por:
( ) ( ) ( )1
, ,s j s sij j
hj k kj
k
G t N G tη ηΓ Γ∈ −
= ∑x y x∪
(6.5)
( ) ( )1s j s sij j
hi i
i
w N wη ηΓ Γ∈ −
= ∑x x∪
(6.6)
Assim como fora feito para a equação parabólica, a função de Green é calculada
utilizando sua interpretação alternativa dada pelas Eqs. (5.10)-(5.14), onde se tem uma
condição inicial pontual ao invés de uma fonte pontual instantânea. Portanto, o
problema variacional discreto associado as Eqs. (5.10)-(5.14) com 0τ = para cada
subdomínio utilizando a aproximação de Galerkin pode ser definido como: para 0t ≥
encontrar ( ), ,h hj tG t S∈x y tal que para todas as funções de ponderação ( )h hw V∈x e
1,2, , eqj n= … , tem-se:
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
1 1
1
0,
s sj j
e e
s j
e
nel nel
e e e ei k kj i k kj
e e
nel
e ei k kj
e
N N d G t N N d G t
N k N d G t
ρ ς= =Ω Ω
= Ω
Ω + Ω +
∇ ⋅ ∇ Ω =
∑ ∑∫ ∫
∑∫
x x
x
x x x x
x x
(6.7)
( ) ( ) ( )1
0 0,s j
e
nel
e ei k kj
e
N N d Gρ= Ω
Ω =∑∫ xx x (6.8)

96
( ) ( ) ( )1
1
0 1 ,s j
j s sij j
e
nel
e ei k kj ij s
e
N N d G iρ η ηΓ Γ
= Ω
Ω = ∈ −∑∫ xx x∪
(6.9)
As Eqs. (6.7)-(6.9) podem ser reescritas em forma matricial como (embora não
mostrado explicitamente, a condição de contorno não reflexiva (5.44) é facilmente
implementada na matriz C ):
( ) ( ) ( )( )( ) 1
0
0
j j j
j
j
s s s
s
s j
t t t
−
+ + =
=
=
Mg Cg Kg 0
g 0
g M 1
, 1,2, , eqj n= … (6.10)
onde ( ) ( ) ( ) ( )( )1 , , , , s jj eq
T
s j kj n jt G t G t G t=g … … é o vetor de Green relacionado a cada
submalha e s sj jeq eqn n×∈M ,
s sj jeq eqn n×∈C e
s sj jeq eqn n×∈K representam, respectivamente, as
matrizes de massa, amortecimento e rigidez para um determinado subdomínio
discretizado s j
hΩ . É importante ressaltar que as dimensões das matrizes massa,
amortecimento e rigidez são menores que as mesmas considerando todo o domínio
discretizado, pois o número de equações jseqn de cada submalha é menor que o número
de equações da malha global eqn , i.e., jseq eqn n< .
Como jseq eqn n< , a coluna final da matriz de Green dada por ( ) ( )
jj st t⊃g g
possuirá valores iguais a zero para os nós não pertencentes a submalha s j
hΩ , i.e.,
( ) 0,jkj sG t k η= ∀ ∉ . Observe também que uma relação entre a numeração local dos nós
das submalhas e a numeração global dos nós da malha global deve ser efetuada ao
inserir os vetores ( )js tg nas colunas ( )j tg da matriz de Green final.

97
Uma vez efetuado a discretização espacial, deve-se proceder com a discretização
temporal através da utilização de uma metodologia numérica para resolver o sistema de
equações diferencias ordinárias expresso pela Eq. (6.10). O método-θ utilizado na
equação parabólica é novamente empregado para se computar o vetor de Green;
entretanto, primeiramente é necessário reescrever a equação diferencial de segunda
ordem em um sistema de equações de primeira ordem da seguinte forma:
( ) ( )
( ) ( ) ( ) 1
, 0
, 0j j j
j j j j
s s s
s s s s j
t
t t −
− = =⎧⎪⎨
+ + = =⎪⎩
g z 0 g 0
Mz Cz Kg 0 z M 1 (6.11)
O sistema de equações (6.11) pode ser reescrito em forma matricial como:
( )( )
( )( )
( )( ) 1
0
0
j j
j j
j
j
s s
s s
s
js
t t
t t
−
⎛ ⎞ ⎛ ⎞−⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟+ =⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞⎜ ⎟ = ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠
g gI 0 0 I 00 M K C 0z z
g 0M 1z
(6.12)
Aplicando o método-θ com a utilização dos subpassos de tempo
( )1 2, , , nt t tα α αΔ Δ Δ… na Eq. (6.12) e expandindo seus termos o seguinte algoritmo é
estabelecido:
( )( ) ( ) ( )
( ) ( )( )( ) ( )
( ) ( ) ( ) ( ) ( )
21
21
1 1
1 1
1
j j
j
j j j j
i i s i i s i
i i s i
s i s i i s i i s i
t t t t t
t t t
t t t t t t
θα θα α
θ α θ θ α
θ α θα
−
−
− −
⎧ + Δ + Δ = − Δ +⎪⎪⎪ − − Δ + − Δ⎨⎪⎪
= + − Δ + Δ⎪⎩
M C K z Kg
M C K z
g g z z
, 1, 2, ,i n= … (6.13)

98
onde 0
i
i jj
t tα=
= Δ∑ com 0 0α = . Como mostrado por WOOD (1990), o método-θ é
equivalemte ao método clássico de Newmark (regra trapezoidal- 1/ 2γ = e 1/ 4β = )
quando 1/ 2θ = e para amortecimento nulo a equivalência é válida quando 2β θ= e
2 1/ 2γ θ= − .
Uma vez que a função de Green para t t≤ Δ é calculada localmente através de
subdomínios com suas respectivas submalhas, a nomenclatura LExGA (“Local Explicit
Green’s Approach”) é utilizada para distinguir do método ExGA onde a matriz de
Green é computada considerando todo o domínio com a malha global. Uma
característica bastante importante a ser considerada quando se aplica o método LExGA
diz respeito ao tipo de problema analisado (modelo físico).
Como descrito na literatura (BATHE, 1996, HUGHES, 2000), na análise de
problemas de propagação de ondas, um número maior de freqüências do espectro
participa da resposta devido às frentes de onda. Desta forma intervalos de tempo
pequenos devem ser utilizados para se obter respostas precisas quando se utiliza
métodos clássicos de integração temporal devido a acurácia de tais métodos, tornando
os métodos explícitos uma escolha natural em detrimento dos métodos implícitos, ou
seja, a restrição quanto a estabilidade nos métodos explícitos a princípio não seria um
grande problema para a análise de tais problemas. Todavia, na prática, isto não é
totalmente verdadeiro, pois o uso de uma malha com elementos de diferentes tamanhos
ou propriedades físicas bastante diferentes pode resultar em um intervalo de tempo
crítico muito pequeno para a análise, comprometendo o uso de métodos explícitos a
não ser que técnicas de partições sejam utilizadas (NEAL & BELYTSCHKO, 1989,
DANIEL, 1998).

99
Por outro lado, em problemas dinâmicos, apenas as primeiras freqüências
participam da resposta e, portanto, intervalos de tempo grandes são utilizados uma vez
que somente as respostas dessas freqüências precisam ser integradas de forma precisa,
sendo as respostas das demais freqüências integradas somente de forma estáveis para
não poluir a resposta final. Logo, os métodos implícitos de integração temporal são
aconselháveis, pois são incondicionalmente estáveis sem nenhuma restrição quanto ao
tamanho do intervalo de tempo.
Tendo em vista tais características quanto ao tipo de problema, conclui-se que o
método LExGA pode ser aplicado de forma mais eficiente em problemas de
propagação de ondas, pois a restrição de intervalos pequenos torna o tamanho dos
subdomínios também pequeno. Isso não acontece em problemas dinâmicos onde o
tamanho de cada subdomínio seria maior devido a intervalos grandes de tempo,
inviabilizando a utilização do método LExGA na prática. É importante observar que o
uso de subpassos de tempo melhora tanto a estabilidade quanto a acurácia do método
ExGA permitindo a utilização de intervalos de tempo grandes em problemas de
propagação de onda. Entretanto, é extremamente importante não se utilizar intervalos
de tempo muito grandes para não inviabilizar o uso de subdomínios, observando que
aumentar o intervalo de tempo implica em um aumento da banda (elementos diferentes
de zero) das matrizes de Green.
Como descrito na literatura (e.g., FRANGI, 2000, GROSU & HARARI, 2007), o
procedimento de semi-discretização não satisfaz de forma exata o princípio da
causalidade, ou seja, respostas diferentes de zero para j c t− > Δx y são encontradas.
Desta forma, o subdomínio discretizado s j
hΩ com sua respectiva submalha denominado
de subdomínio discreto deve ser maior que o subdomínio s j
Ω previsto pelo princípio
100
da causalidade. Uma discussão mais detalhada sobre o tamanho dos subdomínios
discretos será apresentada na seção 6.5.
6.4 Análise de estabilidade e acurácia no domínio temporal
A análise de estabilidade e acurácia é realizada seguindo os mesmos
procedimentos usados para a equação parabólica apresentados no capítulo 3,
observando que agora se tem um sistema de equações ordinárias de segunda ordem.
Inicialmente é importante definir as matrizes de Green analíticas e, portanto,
resolvendo analiticamente o sistema de primeira ordem dado por (6.12), a seguinte
relação é encontrada para as matrizes de Green modificadas:
( ) ( ) ( )( ) ( ) ( )
1
1
t t t te
t t t
−−
−
⎛ ⎞+⎜ ⎟=⎜ ⎟+⎝ ⎠
A G G M C G
G G M C G (6.14)
onde a matriz 2 2eq eqn n×∈A é definida como:
1 1− −
−⎛ ⎞= ⎜ ⎟⎝ ⎠
0 IA
M K M C (6.15)
Posteriormente, deve-se definir um procedimento de diagonalização com o
objetivo de desacoplar o sistema original e tornar a análise tanto de estabilidade quanto
de acurácia mais fácil e instrutiva. Desta forma, substituindo 2λ ω= no problema de
autovalor definido anteriormente no capítulo 3 obtem-se (observe que a parcela do
amortecimento não é incluída no problema de autovalor, pois quer-se apenas
desacoplar as equações):

101
( )2ω− =A I φ 0 (6.16)
onde 1−=A M K e ω denota a freqüência natural do sistema. Logo, a Eq. (6.16) resulta
em eqn autovalores e autovetores expressos por 2 2 21 1( , ), , ( , ), , ( , )
eq eqj j n nω ω ωφ φ φ… … tal
que ( )2 0j jω− =A I φ . Sendo os autovetores linearmente independentes, a matriz A
pode ser diagonalizada através da expressão 1−= ΛA S S com
( )1, , , , eq eq
eq
n nj n
×= ∈S φ φ φ… … e ( )2 2 21 , , , , eq eq
eq
n nj ndiag ω ω ω ×= ∈Λ … … . Uma vez
realizado a diogonalização dos termos envolvendo a matriz K , também é necessário
efetuar um procedimento de diogonalização referente a matriz de amortecimento C .
Isto é alcançado quando a matriz de amortecimento é dita proporcional em relação a
matriz massa e/ou a matriz de rigidez, sendo a expressão de Rayleigh dada por
α β= +C M K considerada aqui como exemplo, onde ,α β são constantes a serem
determinadas geralmente obtidas de forma experimental em casos práticos. Desta forma
o termo envolvendo a matriz de amortecimento de (6.15) pode ser reescrito como
1 1α β− −= +M C I M K e como o termo da matriz de rigidez já foi diagonalizada
considera-se a relação 2 2j j jα βω ξ ω+ = para os termos desacoplados, sendo jξ a taxa
de amortecimento relativo a cada freqüência natural do sistema. Portanto, a matriz de
amplificação analítica referente a equação desacoplada para cada freqüência é dada por:
( ) ( ) ( )( ) ( ) ( )
2
0 1
2 2ˆ , 1, 2, ,2
j j jt
j j j j jj eq
j j j j
g t g t g te j n
g t g t g tω ξ ω ξ ω
ξ ω
−⎛ ⎞⎜ ⎟− Δ⎜ ⎟⎝ ⎠
⎛ ⎞Δ + Δ Δ= = =⎜ ⎟⎜ ⎟Δ + Δ Δ⎝ ⎠
A … (6.17)

102
onde ( )jg t , ( )jg tΔ e ( )jg tΔ representam a função de Green e suas derivadas
temporais para um sistema de um grau de liberdade sendo suas expressões obtidas
expandindo a matriz exponencial e comparando com os termos da matriz do lado
direito da Eq. (6.17). Logo, a expressão para a função de Green ( )jg tΔ é dada por:
( ) 2
2
1 sin( 1 )1
j j tj j j
j j
g t e tξ ω ω ξω ξ
− ΔΔ = − Δ−
(6.18)
Uma vez calculada a matriz de amplificação analítica, deve-se proceder com o
cálculo da matriz de amplificação numérica obtida pelo método-θ aqui utilizado. Desta
forma considerando a Eq. (6.13) para um grau de liberdade referente a uma
determinada freqüência natural, a seguinte expressão aproximada para ( )jg tΔ e
( )jg tΔ é obtida quando subpassos de tempo constantes n e não-contantes m são
empregados:
( )( )
1
01
nmj
ij
i
g tg t
=
⎛ ⎞Δ⎛ ⎞ ⎛ ⎞⎜ ⎟=⎜ ⎟ ⎜ ⎟⎜ ⎟Δ ⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎝ ⎠∏B (6.19)
onde a matriz iB referente aos subpassos de tempo não-constantes é definida como:
( )1
2 2
0 1 0 11 0 1 01
2 20 1 0 1i i ij j j j j j
t tn n
θα θ αω ξ ω ω ξ ω
−⎛ ⎞ ⎛ ⎞− −⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞Δ Δ
= + − −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠B (6.20)
Com a determinação das matrizes de amplificação analítica e numérica, a análise
de estabilidade pode ser efetuada. Para que um método de integração temporal seja
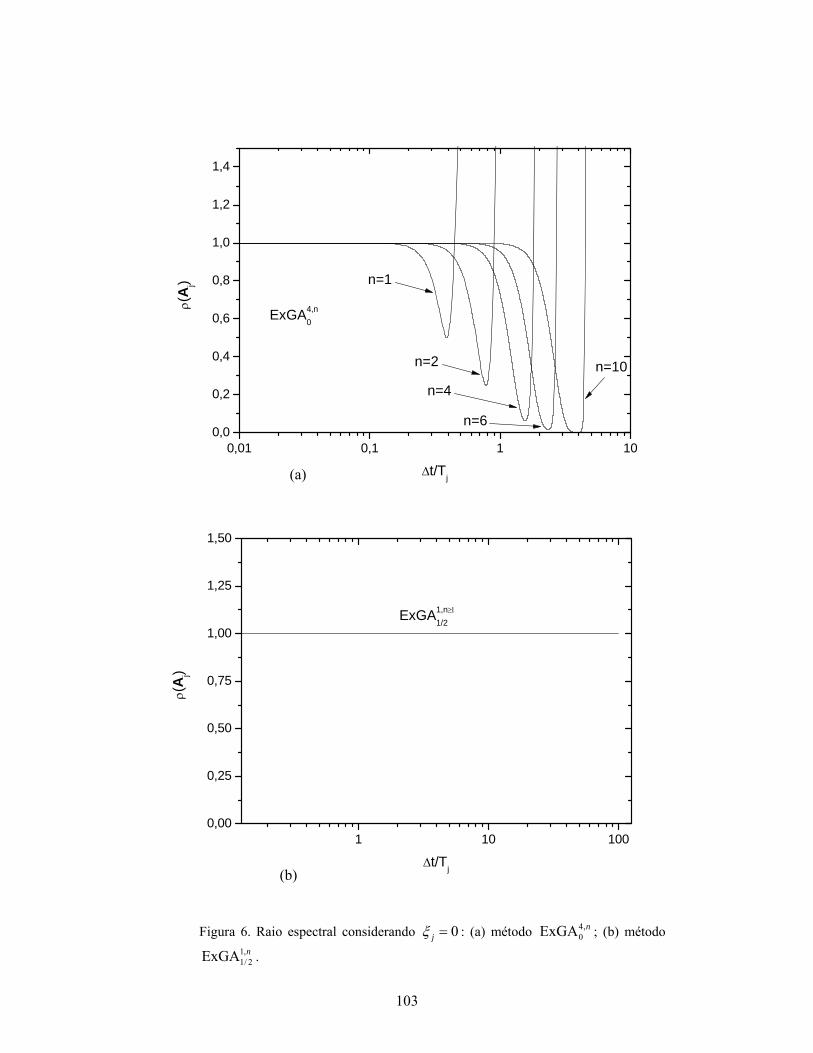
103
0,01 0,1 1 100,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
n=10
n=6
n=4
ρ(A
j)
Δt/Tj
n=1
n=2
ExGA4,n0
1 10 1000,00
0,25
0,50
0,75
1,00
1,25
1,50
ρ(A
j)
Δt/Tj
ExGA1,n≥11/2
Figura 6. Raio espectral considerando 0jξ = : (a) método 4,0ExGA n ; (b) método
1,1/ 2ExGA n .
(a)
(b)
104
estável é necessário que o raio espectral da matriz de amplificação seja menor ou igual
a um, i.e. (BATHE, 1996):
( )1,2
ˆ ˆmax 1j iiρ λ
== ≤A (6.21)
onde iλ são os autovalores da matriz de amplificação.
Embora os parâmetros m (número de subpassos não-constantes), n (número de
subpassos constantes) e θ (parâmetro do método-θ ) permitam o desenvolvimento de
diferentes métodos de integração temporal para o método ,ExGAm nθ , apenas o método
explícito 4,0ExGA n assumindo 0θ = , 4m = e n variável e o método implícito
1,1/ 2ExGA n assumindo 1/ 2θ = , 1m = e n variável são estudados na presente tese. Os
raios espectrais considerando os métodos 4,0ExGA n e 1,
1/ 2ExGA n para 0jξ = são
plotados na Figura 6 em relação ao período 2 /j jT π ω= .
Como visto na Figura 6 o uso de subpassos constantes de tempo n aumenta o
limite crítico de estabilidade linearmente, cuja expressão é dada por / 2 /jt T n πΔ ≤ e,
portanto, em termos práticos tal método pode ser considerado incondicionalmente
estável bastando apenas aumentar o valor de n de forma conveniente para eliminar a
principal desvantagem dos métodos explícitos clássicos. Por outro lado, o método
1,1/ 2ExGA n é incondicionalmente estável e o valor n de subpassos constantes apenas
melhora a acurácia do método como discutido mais adiante. Além disso, os raios
espectrais do método 4,0ExGA n são equivalentes aos do método ExGA-Runge-Kutta
apresentado por LOUREIRO (2007) que por sua vez para 1n = possui o mesmo raio
espectral do método clássico de Runge-Kutta de 4º ordem. O mesmo acontece para o

105
método 1,1/ 2ExGA n , onde para 1n = seu raio espectral se equivale ao do método clássico
de Newmark (regra trapezoidal). Portanto, o uso de subpassos de tempo tanto
constantes como não-constantes gera uma poderosa ferramenta para se derivar de forma
unificada e geral métodos já existentes na literatura bem como novos métodos de
integração temporal como comentado anteriormente.
É importante observar que para o método 4,0ExGA n , o raio espectral possui
valores menores e iguais a um (i.e., ( )ˆ 1jρ ≤A ) enquanto que para o método 1,1/ 2ExGA n
tem-se ( )ˆ 1jρ =A para qualquer freqüência. Como discutido no capítulo 4, o método
dos elementos finitos não consegue calcular de forma precisa os autovalores altos e,
portanto, é aconselhável a utilização de métodos de integração temporal que possuam
amortecimento numérico, ou seja, ( )ˆ 1jρ <A para atenuar as respostas espúrias
oriundas das freqüências mais altas calculadas de forma imprecisa em problemas de
propagação de onda, principalmente aqueles com grandes gradientes e soluções
descontínuas. Além disso, é extremamente importante que as freqüências mais baixas
não sejam sujeitas a amortecimento numérico para evitar a suavização da resposta.
Portanto, espera-se a priori que para certos intervalos de tempo o método 4,0ExGA n
atenue as respostas espúrias enquanto que para o método 1,1/ 2ExGA n tal vantagem não
ocorre.
Como visto nos gráficos de estabilidade tanto para o caso parabólico quanto
hiperbólico, métodos explícitos são condicionalmente estáveis, tendo, portanto, um
intervalo de tempo crítico. Para a determinação do intervalo de tempo crítico é
necessário calcular o maior autovalor maxλ do sistema global (observe que para a
equação hiperbólica tem-se 2max maxλ ω= ). O processo de determinação do maior

106
autovalor considerando as matrizes globais é extremamente oneroso e não usual sendo
tal cálculo realizado nos elementos. Utilizando a expressão do quociente Rayleigh
(BATHE, 1996), pode-se mostrar que:
max maxmax e
eλ λ≤ (6.22)
onde maxeλ representa o máximo autovalor do elemento sendo calculado através do
seguinte problema de autovalor generalizado:
( )e e e eλ− =k m φ 0 (6.23)
Portanto o cálculo dos autovalores considerando as matrizes dos elementos é bem
mais barato computacionalmente, pois envolve matrizes de ordem pequena sendo
muitas vezes calculado de forma analítica para certos tipos de elementos (HUGHES,
2000, LOUREIRO, 2007).
Analogamente ao procedimento realizado para a equação parabólica na
determinação da ordem de acurácia temporal do método ExGA, expansão em série de
Taylor deve ser efetuada nos termos da matriz de amplificação ˆjA tanto para a
analítica quanto para a numérica obtida pelo método-θ , lembrando que um método de
integração temporal possui ordem de acurácia s , i.e., ( )1sO t +Δ se todos os termos da
expansão em série de Taylor da matriz de amplificação analítica e numérica
coincidirem até o termo stΔ . Desta forma, a expansão em série de Taylor dos termos
da matriz de amplificação analítica (6.17) em torno de 0t = pode ser escrita como:

107
( ) ( )
( )
2 22 2 3 3 4 4 5 5
11
2 46 6
4 1 2 1112 3 24 301 12 16
720
anA t t t t
t
ξ ξ ξξω ω ω ω
ξ ξω
− −= − Δ + Δ − Δ + Δ
− +− Δ +…
(6.24)
( ) ( ) ( )
( )
2 2 2 42 2 3 3 4 4 5
12
3 55 6
4 1 2 1 1 12 166 6 120
3 16 16360
anA t t t t t
t
ξ ξ ξ ξ ξξω ω ω ω
ξ ξ ξω
− − − += Δ − Δ + Δ − Δ + Δ
− +− Δ +…
(6.25)
( ) ( ) ( )
( )
2 2 2 42 3 2 4 3 5 4 6 5
21
3 57 6
4 1 2 1 1 12 166 6 120
3 16 16360
anA t t t t t
t
ξ ξ ξ ξ ξω ξω ω ω ω
ξ ξ ξω
− − − += − Δ + Δ − Δ + Δ − Δ
− ++ Δ −…
(6.26)
( ) ( ) ( )
( ) ( )
2 2 2 42 2 3 3 4 4
22
3 5 2 4 65 5 6 6
4 1 2 2 1 1 12 161 2
2 3 243 16 16 1 24 80 64
60 720
anA t t t t
t t
ξ ξ ξ ξ ξξω ω ω ω
ξ ξ ξ ξ ξ ξω ω
− − − += − Δ + Δ − Δ + Δ
− + − + − +− Δ + Δ −…
(6.27)
Analogamente, as expressões em série de Taylor dos termos da matriz de
amplificação numérica obtida utilizando a Eq. (6.19) para o cálculo das funções de
Green são dadas por (para simplificar e sem perda de generalidade, apenas os termos
referentes ao método 4,0ExGA n são apresentados aqui como exemplo):
( ) ( )
( )
4,0
2 22 2 3 3 4 4 5 5
11 4
2 46 6
4 5
4 1 2 11 11 12 3 24 30
1 12 166 51720
nExGAA t t t tn
tn n
ξ ξ ξξω ω ω ω
ξ ξω
− −⎛ ⎞= − Δ + Δ − Δ + − Δ⎜ ⎟⎝ ⎠
− +⎛ ⎞− − + Δ +⎜ ⎟⎝ ⎠
…
(6.28)
108
( ) ( )
( )
( )
4,0
2 22 2 3 3 4
12
2 44 5
4
3 55 6
4 5
4 1 2 16 6
1 12 1611120
3 16 166 51360
nExGAA t t t t
tn
tn n
ξ ξ ξξω ω ω
ξ ξω
ξ ξ ξω
− −= Δ − Δ + Δ − Δ
− +⎛ ⎞+ − Δ⎜ ⎟⎝ ⎠
− +⎛ ⎞− − + Δ +⎜ ⎟⎝ ⎠
…
(6.29)
( ) ( )
( )
( )
4,0
2 22 3 2 4 3 5 4
21
2 46 5
4
3 57 6
4 5
4 1 2 16 6
1 12 1611120
3 16 166 51360
nExGAA t t t t
tn
tn n
ξ ξ ξω ξω ω ω
ξ ξω
ξ ξ ξω
− −= − Δ + Δ − Δ + Δ
− +⎛ ⎞− − Δ⎜ ⎟⎝ ⎠
− +⎛ ⎞+ − + Δ −⎜ ⎟⎝ ⎠
…
(6.30)
( ) ( ) ( )
( )
( )
4,0
2 2 2 42 2 3 3 4 4
22
3 55 5
4
2 4 66 6
4 5
4 1 2 2 1 1 12 161 2
2 3 243 16 1611
60
1 24 80 646 51720
nExGAA t t t t
tn
tn n
ξ ξ ξ ξ ξξω ω ω ω
ξ ξ ξω
ξ ξ ξω
− − − += − Δ + Δ − Δ + Δ
− +⎛ ⎞− − Δ⎜ ⎟⎝ ⎠
− + − +⎛ ⎞+ − + Δ −⎜ ⎟⎝ ⎠
…
(6.31)
Comparando as expressões (6.24)-(6.27) e (6.28)-(6.31), percebe-se que os
termos até 4tΔ são iguais; portanto, o método 4,0ExGA n é de quarta ordem, mostrando
que o procedimento de subpassos de tempo não-constantes m realmente aumenta a
ordem de acurácia do método ExGA. Por outro lado, a utilização de subpassos de
tempo constantes n não aumenta a ordem de acurácia, mas aumenta a precisão do
método uma vez que os erros de truncamento são cada vez menores à medida que se
aumenta o valor de n tal que para n →∞ tem-se 4,0ˆ ˆlim
nExGA anj jn→∞
=A A .
As conclusões descritas anteriormente com relação aos subpassos de tempo
constantes e não-constantes também são válidas para os demais parâmetros adotados no
método ,ExGAm nθ resultando em diferentes métodos de integração temporal. Portanto,
109
embora não mostrado aqui explicitamente, conclui-se que o método 1,1/2ExGA n é de
segunda ordem no tempo, pois 1m = e 1/ 2θ = e que o valor de n apenas melhora a
precisão do método (observe que para 1/ 2θ = subpassos de tempo não-constantes não
podem ser utilizados como discutido no capítulo 4). Para maiores detalhes sobre
estabilidade e acurácia considerando o método ExGA utilizando diferentes métodos
clássicos de marcha no tempo para o cálculo da função de Green, o leitor é encorajado
a ler a dissertação de LOUREIRO (2007).
6.5 Determinação do tamanho dos subdomínios discretos utilizando o princípio da conservação da energia
Como brevemente discutido anteriormente o princípio da causalidade não é bem
representado quando um processo de semi-discretização, onde as variáveis espacial e
temporal são discretizadas de forma independente, é utilizado (FRANGI, 2000,
GROSU & HARARI, 2007). Logo, pode-se concluir a priori que o tamanho do
subdomínio discreto com sua respectiva submalha, ou seja, o domínio discretizado j
hsΩ
não será o mesmo do domínio teórico definido pela Eq. (6.1). LOUREIRO (2007)
apresentou pela primeira vez resultados adotando-se submalhas para problemas
acústicos e mostrou através de exemplos numéricos que a submalha é relativamente
maior que o subdomínio exato; entretanto, LOUREIRO (2007) não apresentou uma
metodologia robusta para a determinação exata da submalha. Levando em consideração
as observações feitas por LOUREIRO (2007), uma nova metodologia baseada no
princípio da conservação da energia é aqui proposta para a determinação do tamanho
exato da submalha.

110
O primeiro passo da metodologia proposta é definir as expressões para a energia
cinética e potencial, dadas respectivamente por (GRAFF, 1991):
( ) ( )1 , , , ,2c j jE G t G t dρ
Ω
= Ω∫ x y x y (6.32)
( ) ( )1 , , , ,2p j jE k G t G t d
Ω
= ∇ ⋅∇ Ω∫ x y x y (6.33)
Pelo princípio da conservação da energia (MARSDEN & HUGHES, 1994;
GRAFF, 1991) e desconsiderando qualquer energia dissipativa, a taxa de aumento da
energia total (cinética e interna (e.g., potencial)) é igual a taxa do trabalho realizado
pelas contribuições externas (e.g., força de volume, fluxo, tração), ou seja:
( ) ( ) ( ) ( )
( ) ( )
1 1, , , , , , , ,2 2
, , , ,
j j j j
j j
d G t G t k G t G t ddt
b t G t d
ρΩ
Ω
⎛ ⎞+ ∇ ⋅∇ Ω =⎜ ⎟⎝ ⎠
Ω
∫∫
x y x y x y x y
x y x y (6.34)
observe que pela definição da função de Green a única contribuição externa é aquela
devido a fonte pontual instantânea.
O segundo passo é definir duas possíveis soluções (a priori diferentes) para o
problema de função de Green, uma para a malha global denominada ( ), ,jG tx y e outra
para a submalha, i.e., ( ), ,jG tx y observando que s j
h hΩ ⊂ Ω . Em seguida deve-se
provar por contradição que as duas soluções são iguais para uma mesma fonte pontual
instantânea aplicada na coordenada jy , i.e., ( ) ( ) ( ) ( ), , , ,j j jb t b t tδ δ= = −x y x y x y .
Como as duas soluções foram estipuladas como solução do problema em questão, sua

111
combinação linear também será uma solução do problema. Tendo em vista este fato, a
diferença entre as duas soluções, definida a seguir também é uma solução (GRAFF,
1991):
( ) ( ) ( ), , , , , ,j j jG t G t G tΔ = −x y x y x y (6.35)
Como a diferença ( ), ,jG tΔ x y também é solução do problema, o princípio da
conservação de energia definido pela Eq. (6.34) continua sendo válido (GRAFF, 1991).
Logo, substituindo (6.35) em (6.34), tem-se:
( ) ( ) ( ) ( )
( ) ( )( ) ( )
1 1, , , , , , , ,2 2
, , , , , ,
j j j j
j j j
d G t G t k G t G t ddt
b t b t G t d
ρΩ
Ω
⎛ ⎞Δ Δ + ∇Δ ⋅∇Δ Ω =⎜ ⎟⎝ ⎠
− Δ Ω
∫∫
x y x y x y x y
x y x y x y (6.36)
Em seguida integrando a Eq. (6.36) com relação ao tempo, a seguinte expressão é
encontrada:
( ) ( ) ( ) ( )
( ) ( )( ) ( )0
0
1 1, , , , , , , ,2 2
, , , , , ,
t
j j j j
t
j j j
G t G t k G t G t d
b t b t G t d dt
ρΩ
Ω
⎛ ⎞Δ Δ + ∇Δ ⋅∇Δ Ω =⎜ ⎟⎝ ⎠
− Δ Ω
∫
∫∫
x y x y x y x y
x y x y x y
(6.37)
Mas como ( ) ( ), , , ,j jb t b t=x y x y o lado direito da Eq. (6.37) se torna nulo e a
seguinte igualdade para a diferença de energia para o instante 0t = e t é estabelecida
(observe que existe conservação de energia uma vez que o sistema não possui nenhum
termo dissipativo):
112
0 0t tc p c pE E E EΔ + Δ = Δ + Δ (6.38)
Como descrito anteriormente, o problema é o mesmo onde se pode concluir que
as condições iniciais dadas são as mesmas. Como as energias para o instante inicial são
iguais devido a condições iniciais equivalentes suas diferenças são obviamente iguais a
zero, i.e., 0 0 0c pE EΔ = Δ = e a expressão (6.38) se reduz a:
0t tc pE EΔ + Δ = (6.39)
Como as energias cinética e potencial são por definição sempre positivas
(MARSDEN & HUGHES, 1994; GRAFF, 1991), por contradição a igualdade (6.39) é
verdadeira se e somente se:
0t tc pE EΔ = Δ = (6.40)
Analisando a igualdade (6.40) conclui-se que ( ) ( ), , , ,j jG t G t=x y x y , ou seja, a
solução deve ser única. Tal unicidade já era esperada uma vez que o problema é o
mesmo. Como descrito por LOUREIRO (2007), a unicidade da solução
( ) ( ), , , ,j jG t G t=x y x y numericamente nos pontos nodais é extremamente complicada,
já que propagação dos erros de arredondamento das operações aritméticas referentes
aos cálculos considerando a malha global e a submalha podem resultar em valores
espúrios. Esses erros podem ser, por exemplo, devido a utilização de um solver direto
onde se tem um número bem maior de operações para o sistema de equações da malha
global ou a um número grande de subpassos de tempo. Portanto, ao invés de proceder

113
com a unicidade da solução diretamente comparando termo a termo os valores nodais
dos resultados obtidos com a malha global e a submalha é mais instrutivo e confiável
garantir a unicidade da solução através das energias definidas a partir da Eq. (6.40), i.e.:
( ) ( )( )21 , , , , 02
tc j jE G t G t dρ
Ω
Δ = − Ω =∫ x y x y (6.41)
( ) ( )( ) ( ) ( )( )1 , , , , , , , , 02
tp j j j jE k G t G t G t G t d
Ω
Δ = ∇ − ⋅∇ − Ω =∫ x y x y x y x y (6.42)
Portanto as energias (6.41)-(6.42) diferentemente dos valores nodais fornecem
apenas um único valor, facilitando a comparação entre as respostas da submalha e da
malha global. O passo final é aproximar numericamente pelo método dos elementos
finitos as energias cinética e potencial, ou seja, obter as expressões discretas das
integrais (6.41)-(6.42). Antes, porém, é importante expandir os termos das integrais
(6.41)-(6.42) com o objetivo de diminuir possíveis erros numéricos de cancelamento
devido a subtração de dois números muito próximos dados pela diferença entre a
função de Green da malha global e a função de Green da submalha. Logo, as energias
(6.41)-(6.42) em sua forma discreta podem ser escritas como (o índice j não implica
em somatório):
( ) ( )
( ) ( ) ( ) ( )
1
1 1
12
1 02
e
s j
e e
nel
h tc kj k l lj
e
nel nel
kj k l lj kj k l lj
e e
E G N N d G
G N N d G G N N d G
ρ
ρ ρ
= Ω
= =Ω Ω
Δ = Ω +
Ω − Ω =
∑∫
∑ ∑∫ ∫
x x
x x x x
(6.43)

114
( ) ( )
( ) ( )
( ) ( )
1
1
1
12
12
1 02
e
s j
e
e
nel
h tp kj k l lj
e
nel
kj k l lj
e
nel
kj k l lj
e
E G k N N d G
G k N N d G
G k N N d G
= Ω
= Ω
= Ω
Δ = ∇ ⋅∇ Ω +
∇ ⋅∇ Ω −
∇ ⋅∇ Ω =
∑∫
∑∫∑∫
x x
x x
x x
(6.44)
ou em forma matricial como:
( )( ) ( ) ( )( ) ( ) ( )( ) ( )1 1 02 2
TT Th tc j j j j j jE t t t t t tΔ = + − =g Mg g Mg g Mg (6.45)
( )( ) ( ) ( )( ) ( ) ( )( ) ( )1 1 02 2
T T Th tp j j j j j jE t t t t t tΔ = + − =g Kg g Kg g Kg (6.46)
Como as dimensões dos vetores de Green da malha global (i.e., ( ) eqnj t ∈g ) e da
submalha (i.e., ( )s jeqn
j t ∈g ) são diferentes, pois jseq eqn n< , as multiplicações de matriz-
vetor referentes a última parcela de (6.45)-(6.46) devem ser efetuadas no sistema global
levando em consideração que os valores nodais do vetor de Green ( )j tg fora da região
da submalha são, por definição, iguais a zero.
Portanto para determinar o tamanho exato da submalha, as energias definidas
acima devem ser computadas e comparadas com aquelas utilizando a malha global. Na
prática, o cálculo das energias para todas as submalhas devido às fontes pontuais
instantâneas aplicadas nos pontos jy ( )1, , eqj n= … não é realizado, sendo calculadas
apenas para alguns pontos jy de referência, contidos em regiões críticas da malha, e.g.,
contendo diferentes materias, próximas ao contorno. Logo, o tamanho da submalha

115
obtido nesses pontos de referência pode ser extrapolado para os demais pontos da
malha.
Dependendo da estrutura da malha e do problema a ser modelado, muitas
submalhas serão equivalentes reduzindo assim o custo computacional referente ao
cálculo do vetor de Green, pois o mesmo só precisa ser computado uma única vez.
Além disso, com o objetivo de diminuir o custo computacional, o cálculo das energias
utilizando a malha global deve ser evitado. Desta forma, pode-se proceder de duas
maneiras distintas sendo a primeira adotar, ao invés da malha global, um determinado
subdomínio discreto com sua respectiva malha relativamente grande que possa ser
considerado equivalente a malha global; entretanto, tal estratégia dependerá da
experiência do analista em selecionar um subdomínio discreto grande o suficiente.
Outra maneira seria criar uma estratégia levando em consideração a unicidade entre a
função de Green da malha global e da submalha, i.e., ( ) ( )j jt t=g g , que estabelece a
seguinte igualdade para as energias da malha global e submalha a partir das Eqs. (6.45)
-(6.46):
( )( ) ( ) ( )( ) ( )1 12 2
TTh t h tc j j j j cE t t t t E= = =g Mg g Mg (6.47)
( )( ) ( ) ( )( ) ( )1 12 2
T Th t h tp j j j j pE t t t t E= = =g Kg g Kg (6.48)
Obviamente, a princípio, não se pode utilizar as Eqs. (6.47)-(6.48), pois se
procura justamente a função de Green da submalha ( )j tg que foi assumida a priori
igual a da malha global ( )j tg . Entretanto, pode-se estabelecer uma condição
necessária, porém não suficiente para determinar a função de Green a partir das Eqs.

116
(6.47)-(6.48). Desta forma, o tamanho da submalha estará definido quando as energias
calculadas por (6.47)-(6.48) adotando-se um processo iterativo com submalhas
consecutivas e maiores que as anteriores convergirem para um único valor, i.e., o valor
obtido se a malha global fosse utilizada. Embora, do ponto de vista teórico, possa
ocorrer energias iguais para soluções diferentes, resultados preliminares mostraram que
tal fato dificilmente ocorrerá, pois as submalhas consecutivas são selecionadas de tal
forma que não haja, do ponto de vista físico, reflexões no contorno fictício e, portanto,
as soluções deverão ser próximas. Contudo, igualdade de energias devido a soluções
diferentes não deve ser descartada, mas muito provavelmente tal fato não ocorrerá para
todas as submalhas selecionadas para o processo iterativo, indicando que quanto mais
submalhas consecutivas forem utilizadas no processo iterativo maior será a sua
confiabilidade. Está estratégia tem uma vantagem comparativamente a primeira, pois
não é necessário armazenar vetores de Green da malha global nem efetuar
multiplicações entre o vetor de Green da malha global e da submalha sendo sua
implementação computacional mais fácil e menos onerosa.
Uma vez que as duas estratégias apresentadas acima possuem problemas sendo a
primeira estratégia relacionada ao custo computacional enquanto que a segunda a falta
de garantia de sucesso, pois se tem apenas uma condição necessária, porém, não
suficiente. A determinação da submalha pode ser feita utilizando-se as duas estratégias
simultaneamente visando um menor custo computacional juntamente com a garantia de
sucesso do ponto de vista matemático. Desta maneira, deve-se primeiramente utilizar as
Eqs. (6.47)-(6.48) através de um processo iterativo como discutido anteriormente para
uma estimativa inicial da sumalha. Posteriomente deve-se utilizar as duas últimas
submalhas obtidas pelo processo iterativo a qual possuem as mesmas energias e
empregar as Eqs. (6.45)-(6.46); portanto, caso seja obtido um valor diferente de zero,

117
tal situação indica que energias iguais para soluções diferentes foram obtidas indicando
que o tamanho da submalha está errado. Por outro lado, se a diferença de energia das
Eqs. (6.45)-(6.46) forem iguais a zero, tem-se a garantia que aquele tamhanho da
submalha está realemnte correto, eliminando assim o uso da malha global ou uma
submalha grande o suficiente como fora comentado anteriormente.
Cabe aqui ressaltar que as matrizes de Green utilizadas pela expressão recursiva
(5.54) utilizada para o método ExGA devem ser computadas de forma precisa, ou seja,
é recomendável que a igualdade (6.45)-(6.46) ou (6.47)-(6.48) que relaciona as energias
obtidas a partir da submalha e da malha global seja satisfeita com uma tolerância de
erro baixa para garantir a unicidade numérica entre as soluções. De fato, supondo que a
solução em um instante de tempo qualquer kt k t= Δ queira ser computada, a expressão
recursiva (5.54) pode ser escrita como:
0 1 0 2 1 1k k k k k− − −= + + + +G G GX A X A L A L L… (6.49)
onde ( )k Tk k=X U U e
( ) ( ) ( )( ) ( ) ( )t t tt t t
⎛ ⎞+= ⎜ ⎟⎜ ⎟+⎝ ⎠
G
G M G C G MA
G M G C G M (6.50)
( ) ( )
( ) ( )
0
0
t
kk
t
k
t t d
t t d
τ τ τ
τ τ τ
Δ
Δ
⎛ ⎞Δ − +⎜ ⎟
⎜ ⎟= ⎜ ⎟⎜ ⎟Δ − +⎜ ⎟⎝ ⎠
∫∫
G FL
G F
(6.51)
Nota-se claramente que a matriz de amplificação GA aparece elevada ao número
de passos de tempo k . Logo, pode-se concluir que se as matrizes de Green não forem

118
computadas de forma precisa por mais que os erros das matrizes de Green sejam
pequenos a priori, tais erros irão obviamente se amplificar exponencialmente e a
resposta para tempos longos (ou mesmo tempos curtos dependendo da precisão das
matrizes de Green) irá se deteriorar, causando instabilidade ou convergindo para uma
solução qualquer diferente da solução original.
119
7 Resultados Numéricos
Capítulo 7 Resultados Numéricos
7.1 Introdução
Neste capítulo são apresentados alguns exemplos numéricos com o objetivo de
validar e mostrar as vantagens da formulação proposta denominada de método da
aproximação explícita de Green (ExGA).
Primeiramente são apresentados resultados referentes a equação parabólica,
sendo analisados problemas transientes de condução de calor. Um enfoque maior é
dado na análise do procedimento de subpassos de tempo utilizado no cálculo da função
de Green para aumentar a precisão do método ExGA. Posteriormente, problemas de
propagação de ondas (equação hiperbólica) são focados e resolvidos utilizando o
método da aproximação explícita de Green local (LExGA) que utiliza submalhas,
visando um menor esforço computacional.

120
7.2 Exemplos numéricos: Equação parabólica
7.2.1 Considerações iniciais
No decorrer dos exemplos e objetivando facilitar a nomenclatura dos vários
métodos de marcha no tempo originados da metodologia proposta, a seguinte notação é
utilizada:
,m nExGAθ - utilizado para o procedimento de marcha no tempo dado pela Eq.
(2.30) com a convolução sendo calculada pela Eq. (3.22).
,m nExGAMθ - utilizado para o procedimento de marcha no tempo dado pela Eq.
(3.18) com a solução particular sendo calculada pela Eq. (3.28) (observe que a letra M
esta relacionada a utilização da matriz de Green modificada).
O sobrescrito e subscrito são parâmetros relacionados ao método-θ de integração
temporal utilizado para computar a matriz de Green e significam o seguinte:
m - subpassos de tempo não-constantes.
n - subpassos de tempo constantes.
θ - parâmetro do método-θ , onde [ ]0,1θ ∈ .
7.2.2 Análise de convergência
Com o objetivo de mostrar que o estudo e demonstração da ordem de acurácia
realizada para um sistema com um grau de liberdade também é valida para um sistema

121
com múltiplos graus de liberdade, o seguinte problema com dois graus de liberdade é
empregado como exemplo:
( )( )
( )( )
11
22
4 3 5 3 03 3 3 3 0
T tT tT tT t
⎛ ⎞ ⎛ ⎞− −⎛ ⎞ ⎛ ⎞ ⎛ ⎞+ =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠
(7.1)
( )( )
1
2
0 10 0
TT⎛ ⎞ ⎛ ⎞
=⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
(7.2)
cuja solução analítica é dada por:
( )( ) ( )
21
22 1
t
t t
eT tT t e e
−
− −
⎛ ⎞⎛ ⎞⎜ ⎟=⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠
(7.3)
Dentre os vários métodos possíveis que a formulação proposta proporciona, os
métodos ,11mExGA , ,1
2/3mExGA , 1,
1nExGA e 1,
2 /3nExGA , ou seja, métodos baseados em
subpassos de tempo constantes e não-constantes são selecionados como exemplos e
uma análise de convergência é efetuada. Por motivo de validação, as taxas de
convergência para tais métodos são comparadas com aquelas dos métodos clássicos de
Cranck-Nicolson ( 1/ 2θ = ), Euler implícito ( 1θ = ) e Galerkin ( 2 / 3θ = ). É importante
ressaltar que embora a notação ,m nExGAθ seja utilizada, as conclusões aqui tiradas
também são validas para os métodos ,m nExGAMθ uma vez que a única diferença entre
eles é a maneira como a matriz de Green é computada visando um menor esforço
computacional, não havendo alteração do resultado final visto que nesse exemplo não
existe força externa. Para analisar a taxa de convergência (ou ordem de acurácia) com o
refinamento sucessivo do intervalo de tempo tΔ , a seguinte norma para o erro relativo
é utilizada:
122
( )( ) ( )
( )2
2
num an
an
t te t
t
−=
T T
T (7.4)
onde ( )an tT , ( )num tT representam, respectivamente, os vetores solução analítico e
numérico.
As taxas de convergência no tempo de referência 5rt s= para os métodos
mencionados acima são plotadas nas Figuras 7-8. Como observado a ordem de acurácia
dos métodos ,1m nExGA e ,
2/3m nExGA com 2,3,4,5m = é realmente aumentada e tem o
mesmo valor do número de subpassos de tempo não-constantes m como previsto pela
teoria. Por outro lado, apesar dos erros relativos diminuírem a medida que se aumenta o
número de subpassos de tempo constantes n para os métodos 1,1
nExGA e 1,2 /3
nExGA , suas
respectivas ordens de acurácia não são aumentadas, permanecendo iguais as dos
métodos clássicos utilizados. Além disso, analisando as Figuras 7-8, observa-se
primeiramente que o método de Galerkin é mais preciso que o método Euler implícito.
Posteriormente, observa-se que o método de Cranck-Nicolson é ligeiramente mais
preciso que o método 2,1
nExGA , e que o oposto ocorre para os métodos Cranck-
Nicolson e 2,2 /3
nExGA .

123
Figura 7. Comparação da taxa de convergência no tempo 5rt s= considerando os seguintes métodos: (a) Euler implícito, Cranck-Nicolson,
,11mExGA para 2,3, 4,5m = ; (b) Galerkin, Cranck-Nicolson, ,1
2/3mExGA para
2,3, 4,5m = .
(a)
(b)
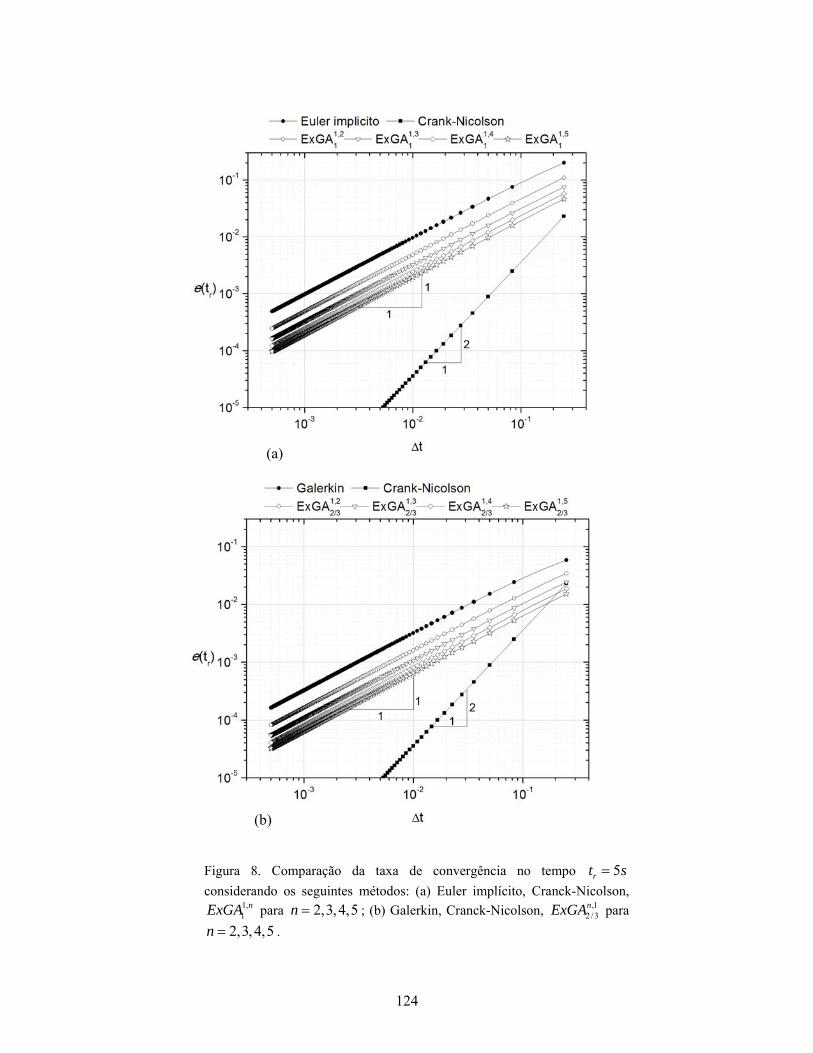
124
Figura 8. Comparação da taxa de convergência no tempo 5rt s= considerando os seguintes métodos: (a) Euler implícito, Cranck-Nicolson,
1,1
nExGA para 2,3,4,5n = ; (b) Galerkin, Cranck-Nicolson, ,12 /3nExGA para
2,3, 4,5n = .
(a)
(b)
125
7.2.3 Condução de calor transiente unidirecional
No presente exemplo uma barra retangular de dimensão 4 1m m× submetida a uma
condição inicial unitária e constante ao longo de todo o domínio (i.e., ( ),0 1oT C=x )
como esquematizado na Figura 9(a) é analisada. No contorno esquerdo (i.e., 0x = ),
condição de Dirichlet nula é imposta enquanto que para os demais contornos a
condição de Neumman nula é prescrita como também mostrado na Figura 9(a). O
modelo é discretizado em 64 elementos quadriláteros bilineares como ilustrado na
Figura 9(b). As propriedades físicas do modelo são: 31.0 /kg mρ = , 01.0 /( )c J kg C= e
01.0 /( )k W m C= . A solução analítica pode ser escrita da seguinte forma (CARSLAW &
JAEGER, 1959):
( )( )
( ) ( )2 2
22 1
4
0
8cos2 2 1, cos2 2
nt
L
k
nnT x t e L xL L n
π ππ
π π
∞ − +
=
+⎛ ⎞= −⎜ ⎟ +⎝ ⎠∑ (7.5)
onde 4L = é o comprimento da barra.
O presente exemplo tem por objetivo mostrar algumas das características
numéricas apresentadas no capítulo 3 que um método de integração temporal deve
possuir. Para tal, primeiramente, o histórico da temperatura no ponto B(4,0.5) bem
como o erro normalizado global dado por ( ) ( ) ( )( )2 2/ maxnum an ant t t−T T T
considerando os métodos Euler implícito, ,11mExGAM para 2, 4m = e 1,
1nExGAM para
2,4n = são analisados. A Figura 10 mostra as respostas dos diferentes métodos
mencionados anteriormente considerando um intervalo de tempo relativamente grande
dado por 4t sΔ = com seus erros globais sendo plotados na Figura 11.

126
Como observado na Figura 10, resultados não precisos são obtidos pelo método
tradicional Euler implícito devido ao fato que o mesmo é somente de primeira ordem
de acurácia no tempo. Por outro lado, nota-se claramente que os resultados são bastante
melhorados quando se utiliza o método ,11mExGAM e aumenta-se o número de
subpassos de tempo não-constantes. Além disso, embora resultados mais precisos
sejam obtidos pelo método 1,1
nExGAM aumentando-se o número de supassos de tempo
constantes, seus resultados não são tão precisos quanto os fornecidos pelo método
,11mExGAM , já que, diferentemente do método ,1
1mExGAM , não há um aumento efetivo
da ordem de acurácia para o método 1,1
nExGAM . De fato, tais conclusões podem ser
mais facilmente observadas analisando o gráfico do erro global normalizado, onde o
T(x,0)=1T=0 q=0
4 m
1 m
q=0
q=0x
y
A B
Figura 9. Barra retangular: (a) geometria e condições de contorno; (b) malha composta de 64 elementos quadriláteros bilineares e pontos selecionados.
(a)
(b)

127
erro diminui drasticamente quando se aumenta o número de subpassos não-constantes
de 2m = para 4m = . Tal fato não ocorre quando se aumenta o número de subpassos
constantes de 2n = para 4n = sendo o método 2,11ExGAM até mais preciso que o
método 1,41ExGAM . Logo, pode-se concluir que para se obter resultados extremamente
precisos o número de subpassos constantes deve ser bem maior que o número de
subpassos não-constantes.
Posteriormente o histórico da temperatura no ponto A(0.25,0.5) para um intervalo
de tempo 1t sΔ = considerando os métodos Cranck-Nicolson, Galerkin e ,12 /3mExGAM
para 3,4m = é analisado (as respostas numéricas são plotadas na Figura 12). Antes de
proceder com a análise dos resultados, é importante observar que o presente exemplo é
classificado como “stiff” (HAIRER et al., 1987), pois a resposta próximo ao contorno
0x = nos instantes iniciais possui uma variação (ou gradiente) bem maior que as
demais posições devido a mudança brusca entre a condição de contorno nula de
Dirichlet e a condição inicial dada. Portanto, métodos com a característica de L-
estabilidade e 0jA ≥ (fator de amplificação) são preferidos a priori para evitar
oscilações espúrias. De fato, como observado na Figura 12, o método clássico de
Cranck-Nicolson gera respostas com altas oscilações, pois o mesmo possui fator de
amplificação negativo com lim 1j
jtA
λ Δ →∞= − de tal forma que as oscilações são eliminadas
de forma muito lenta no decorrer da marcha no tempo. Já o método de Galerkin produz
oscilações somente nos instantes iniciais, pois apesar de seu fator de amplificação ser
negativo tem-se lim 0.5j
jtA
λ Δ →∞= − e, portanto, as oscilações são supridas de forma mais
rápida. Por outro lado, os métodos ,12 /3mExGAM para 3, 4m = resultam em respostas sem
oscilações uma vez que o fator de amplificação tende para o analítico a medida que se

128
aumenta o número de subpassos de tempo não-constantes, estabelecendo métodos com
L-estabilidade e 0jA ≥ . Na realidade, analisando a Figura 12(c) mais detalhadamente,
observa-se que o método 3,12/3ExGAM produz uma pequena oscilação no primeiro
intervalo de tempo, já que seu fator de amplificação apesar de pequeno ainda é
negativo. Portanto, como discutido no capítulo 3, subpassos de números pares devem
ser utilizados para garantir que 0jA ≥ .
Finalmente serão analisadas as vantagens de se utilizar subpassos de tempo
constantes na formulação proposta, sendo o método explícito 1,0
nExGA utilizado.
Observe que nesse caso, a matriz capacitância diagonal é utilizada e, portanto, o
procedimento de marcha no tempo 1,0
nExGA pode ser eficientemente empregado, pois a
inversa da matriz capacitância é facilmente computada. Devido a característica “stiff”
do presente problema e muito comum em modelos de elementos finitos, autovalores
mais altos também participam da resposta para modelar a rápida variação da solução
próxima ao contorno em 0x = . Desta forma, métodos explícitos de integração
temporal não são aconselhados, pois a restrição de estabilidade aliada aos autovalores
altos resultam em intervalos de tempo críticos muito pequenos. De fato, pode-se
mostrar que o maior autovalor do presente modelo é dado por max 63.95λ ≈ e, portanto,
a restrição de estabilidade resulta em intervalos de tempo tal que 0.031t nΔ ≤ para o
método 1,0
nExGA (vale ressaltar que tal restrição seria ainda mais severa caso a matriz
capacitância consistente, i.e., não diagonal fosse utilizada). Para 1n = o intervalo de
tempo deve ser bastante pequeno resultando em um número grande de passos de tempo.
Para contornar tal desvantagem, o uso de subpassos de tempo constantes n pode ser
eficientemente empregado uma vez que o limite crítico de estabilidade é aumentado de
forma linear, permitindo o uso de intervalos de tempo maiores sem perda de precisão

129
nos resultados. De fato, o histórico da temperatura no ponto B(4,0.5) é plotado na
Figura 13 e como observado, a resposta numérica considerando 100n = com 3t sΔ = é
tão precisa quanto a resposta obtida com 1n = e 0.03t sΔ = com a vantagem de se
utilizar um pequeno número de passos de tempo. Logo, o método 1,0
nExGA apesar de
explícito do ponto de vista teórico, o mesmo pode ser considerado incondicionalmente
estável na prática bastando apenas selecionar de forma conveniente o número de
subpassos constantes n .
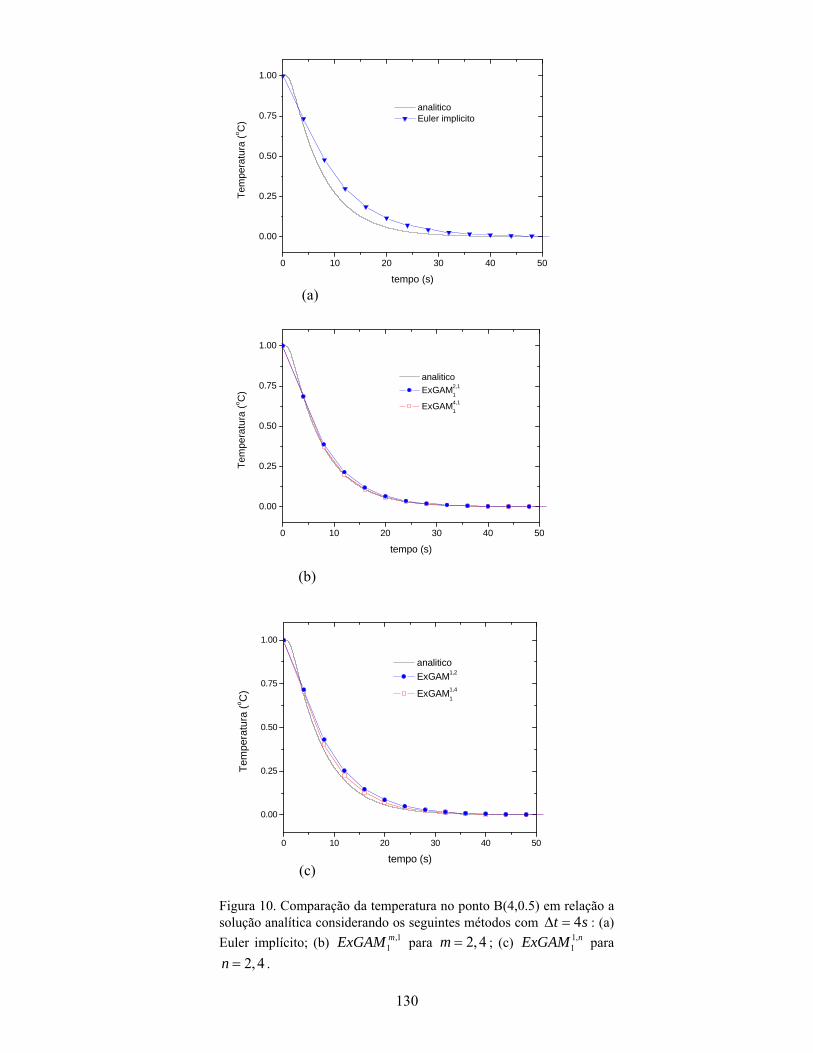
130
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico ExGAM2,1
1
ExGAM4,11
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico ExGAM1,2
ExGAM1,41
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico Euler implicito
Figura 10. Comparação da temperatura no ponto B(4,0.5) em relação a solução analítica considerando os seguintes métodos com 4t sΔ = : (a) Euler implícito; (b) ,1
1mExGAM para 2, 4m = ; (c) 1,
1nExGAM para
2, 4n = .
(a)
(b)
(c)
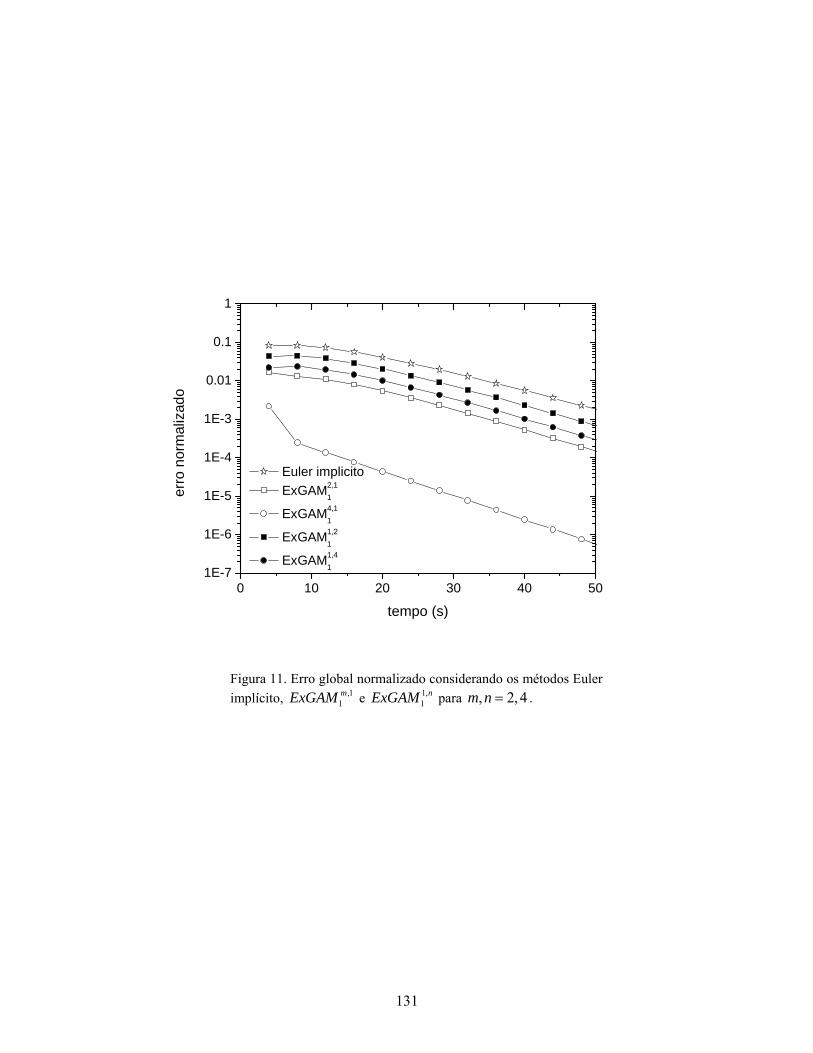
131
0 10 20 30 40 501E-7
1E-6
1E-5
1E-4
1E-3
0.01
0.1
1
erro
nor
mal
izad
o
tempo (s)
Euler implicito ExGAM2,1
1
ExGAM4,11
ExGAM1,21
ExGAM1,41
Figura 11. Erro global normalizado considerando os métodos Euler implícito, ,1
1mExGAM e 1,
1nExGAM para , 2, 4m n = .
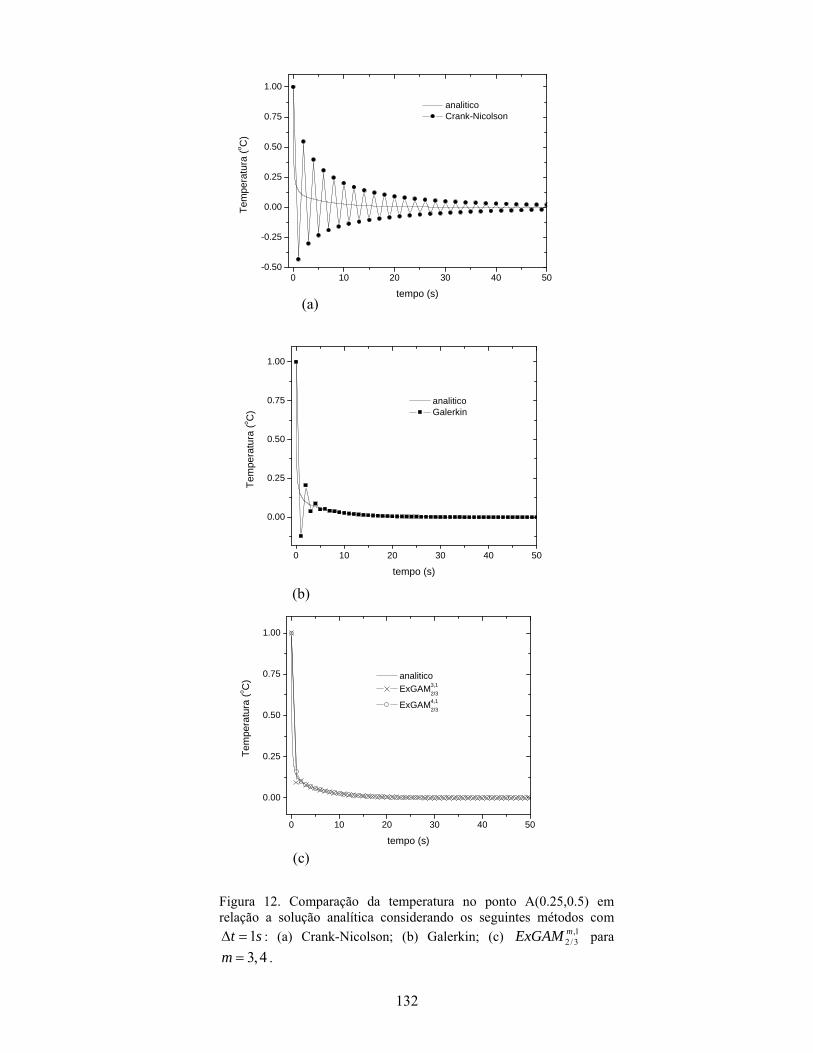
132
0 10 20 30 40 50-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico Crank-Nicolson
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico Galerkin
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analitico ExGAM3,1
2/3
ExGAM4,12/3
Figura 12. Comparação da temperatura no ponto A(0.25,0.5) em relação a solução analítica considerando os seguintes métodos com
1t sΔ = : (a) Crank-Nicolson; (b) Galerkin; (c) ,12 /3mExGAM para
3, 4m = .
(a)
(b)
(c)

133
0 10 20 30 40 50
0.00
0.25
0.50
0.75
1.00
Tem
pera
tura
(o C)
tempo (s)
analiticoExGA2,n
0 : Δt=0.03s (n=1) Δt=3s (n=100)
Figura 13. Comparação da temperatura no ponto B(4,0.5) em relação a solução analítica considerando o método explícito 2,
1nExGA para
1,100n = e diferentes intervalos de tempo.

134
7.2.4 Meio heterogêneo
O presente exemplo considera um domínio não-retangular heterogêneo
constituído de dois materias cujas dimensões são especificadas na Figura 14(a). O
modelo proposto considera a aplicação de uma fonte ( ) 3, 1800 /b t W m=x em todo o
domínio e para o contorno prescereve-se a condição de Dirichlet com 10 oT C= no
contorno esquerdo e a condição de Neumman com 24000 /q W m= para o contorno
superior e 0q = para os demais contornos como também mostrado na Figura 14(a)
(condição inicial nula é adotada em todo o domínio). O modelo é discretizado em 800
elementos quadriláteros bilineares como esquematizado na Figura 14(b). As
propriedades físicas dos materiais são: 31 2702 /kg mρ = , 0
1 903 /( )c J kg C= ,
01 237 /( )k W m C= e 3
2 2790 /kg mρ = , 02 883 /( )c J kg C= , 0
2 168 /( )k W m C= .
Devido a ausência de uma solução analítica para o presente modelo, os resultados
numéricos obtidos pelos diferentes métodos numéricos empregados na análise são
comparados com uma solução de referência obtida através do método Euler implícito
com um intervalo de tempo pequeno dado por 60t sΔ = . A Figura 16 mostra o histórico
da temperatura nos pontos nodais selecionados A(0.15,0.9) e B(1.7,0.5) considerando
os métodos Euler implícito, Crank-Nicolson e 4,11ExGAM adotando-se um intervalo de
tempo grande dado por 410t sΔ = e o método explícito 2,4000ExGA para um intervalo de
tempo 1350t sΔ = . Como observado na Figura 15(a) e pelos mesmos motivos
discutidos no exemplo anterior, o método de Crank-Nicolson apesar de ser de segunda
ordem no tempo produz grandes oscilações no ponto A(0.15,0.9) devido a rápida
variação da temperatura neste ponto, equanto que o método de Euler implícito apesar

135
Figura 14. Domínio não-retangular: (a) geometria e condições de contorno; (b) malha composta de 800 elementos quadriláteros bilineares.
(b)
q=4000W/m²
T=10
ºC
b(x,t)=1800W/m³
q=0
q=0material 1
material 2
2.0
1.0
0.5
x
y
(a)

136
de não produzir oscilações, sua resposta não é suficientemente precisa pois o mesmo é
apenas de primeira ordem no tempo. Diferentemente destes dois métodos, o método
4,11ExGAM produz resultados precisos e confiáveis, pois o mesmo é de quarta ordem no
tempo possuindo as proriedades de L-estabilidade e 0jA ≥ que um método robusto
precisa ter (o número de subpassos de tempo não-constantes 4m = foi suficiente para
gerar resultados precisos; entretanto, caso se queira obter resultados mais precisos
outros valores de m podem ser utilizados).
Uma característica bastante importante a ser comentada diz respeito a utilização
de métodos explícitos em problemas transientes de condução de calor. Como descrito
na literatura (HUGHES, 2000), o maior autovalor do sistema é proporcional ao inverso
do quadrado do comprimento característico do elemento, i.e., ( )2max O hλ −= . Logo,
para sistemas grandes com muitas equações (i.e., 1eqn ) tem-se max min/ 1λ λ ,
ocasionando em uma restrição muito severa quanto ao intervalo de tempo crítico para
métodos explícitos tradicionais, favorecendo o uso de métodos incondicionalmente
estáveis. De fato, o maior autovalor para o presente modelo considerando matriz
capacitância diagonal é dado por max 0.585λ ≈ e, portanto, o limite crítico para o
intervalo de tempo considerando o método 2,0
nExGA é 3.41t nΔ ≤ . Desta maneira, para
1n = (método clássico de Runge-Kutta de segunda ordem no tempo) o intervalo de
tempo para garantir estabilidade é extremamente pequeno para a análise, requerendo
um número de intervalos de tempo muito grande e tornando a análise
computacionalmente onerosa. Por outro lado, como o método proposto 2,0
nExGA possui
a vantagem de estender o limite de estabilidadde de forma linear, 400n = subpassos de
tempo constantes é selecionado para diminuir o número total de passos de tempo sem
comprometer a precisão dos resultados. Realmente, como observado na Figura 15(b),

137
resultados bastante precisos são obtidos pelo método 2,4000ExGA , reduzindo o número
total de passos de tempo de 20588 caso a análise fosse realizada considerando 1n =
e 3.4t sΔ = para apenas 52 passos de tempo.
Para mostrar o comportamento da solução em todo o domínio no decorrer do
tempo, os campos de temperatura em diferentes instantes considerando o método
4,11ExGAM com 60t sΔ = são plotados nas Figuras 16-17. Como observado,
inicialmente, a região próxima ao contorno esquerdo é a mais quente devido a
temperatura prescrita e a medida que o tempo passa o fluxo imposto no contorno
superior vai tornando a região próxima ao canto superior direito a mais quente. De fato,
isso também pode ser visto nos gráficos de temperatura nos pontos A(0.15,0.9) e
B(1.7,0.5) da Figura 15, onde nos primeiros instantes o ponto A(0.15,0.9) possui uma
maior temperatura e rapidamente o ponto B(1.7,0.5) torna-se mais quente.

138
Figura 15. Comparação da temperatura nos pontos A(0.15,0.9) e B(1.7,0.5) em relação a solução de referência (Euler implícito-
60t sΔ = ) considerando os seguintes métodos: (a) Euler implícito, Cranck-Nicolson e 4,1
1ExGAM com 10000t sΔ = ; (b) 2,4000ExGA
com 1350t sΔ = .
0 1x104 2x104 3x104 4x104 5x104 6x104 7x104
0
10
20
30
40
50
60
70
Tem
pera
tura
(o C)
tempo (s)
Euler implicito (sol. referência) Euler implicito Cranck-Nicolson ExGAM4,1
1
ponto B
ponto A
0 1x104 2x104 3x104 4x104 5x104 6x104 7x104
0
10
20
30
40
50
60
70
Tem
pera
tura
(o C)
Tempo (s)
Euler implicito (sol. referência) ExGA2,400
0
ponto A
ponto B
(a)
(b)

139
Figura 16. Campo de temperatura considerando o metodo 4,1
1ExGAM com 60t sΔ = nos seguintes instantes: (a) 60t s= ; (b) 1860t s= ; (c) 3660t s= .
(a)
(b)
(c)

140
Figura 17. Campo de temperatura considerando o metodo 4,11ExGAM com 60t sΔ =
nos seguintes instantes: (a) 6060t s= ; (b) 15060t s= ; (c) 36060t s= .
(a)
(b)
141
7.3 Exemplos numéricos: Equação hiperbólica
7.3.1 Considerações iniciais
Esta seção tem por objetivo apresentar alguns resultados numéricos obtidos
utilizando-se o método LExGA (“Local Explicit Green’s Approach”) onde a função de
Green é computada localmente através de submalhas e também validar a metodologia
proposta de determinação dos tamanhos das submalhas pelo princípio da conservação
da energia. A análise é efetuada considerando um método explícito e outro implícito
dados por:
4,0
nLExGA - método explícito obtido adotando-se 4m = e n variável.
1,1/ 2
nLExGA - método implícito obtido adotando-se 1m = e n variável.
A ausência da letra “L” na nomenclatura acima (i.e., 4,0
nExGA e 1,1/ 2
nExGA )
significa que a matriz de Green é computada utilizando a malha global e tais métodos
são também usados por motivos de comparação. Além disso, é importante ressaltar que
os métodos 4,0
nExGA e 1,1/2
nExGA são idênticos aos métodos ExGA-Runge-Kutta e
ExGA-Newmark (regra trapezoidal) apresentados por LOUREIRO (2007), mas com a
vantagem de serem obtidos de uma forma geral a partir da mesma metodologia, ou seja,
do uso de subpassos de tempo constantes e não-constantes.
Nos exemplos que se seguem apenas malhas uniformes são utilizadas e, portanto,
para facilitar a programação referente ao cálculo numérico da função de Green adota-se
um suporte quadrangular ao invés de um suporto circular para definir a submalha como
esquematizado na Figura 18. Desta maneira o tamanho da submalha quadrangular dado

142
por d será um parâmetro a ser calculado pelo princípio da conservação da energia
através das Eqs. 6.45-6.46 ou das Eqs. 6.47-6.48. Como discutido anteriormente, o
procedimento de semi-discretização não satisfaz de forma exata o princípio da
causalidade e, portanto, tem-se a priori d r> sendo r c t= Δ o tamanho exato dado
pelo princípio da causalidade.
Devido a inversa da matriz massa na condição inicial para a matriz de Green, i.e.,
( ) 10 −=G M , matriz massa diagonal é utilizada tanto para o método explícito quanto
para o implícito. Isto tem por objetivo, além de evitar a resolução de um sistema de
equações extra, resultar em submalhas menores, pois caso a matriz massa consistente
fosse utilizada submalhas maiores seriam obtidas. Tal fato ocorre porque, ao invés de
uma condição inicial concentrada em um único nó (ponto fonte jy ) no caso da matriz
massa diagonal, tem-se, para a matriz massa consistente, uma distribuição de condições
iniciais diferentes de zero em todo domínio com valores significativos próximos ao
ponto fonte.
A princípio, a idéia de se adotar uma matriz massa diagonal para o método
implícito parece algo desnecessário, pois a matriz massa consistente pode ser
implementada sem dificuldades e com o mesmo custo computacional na resolução do
sistema de equações referente a matriz efetiva dada por ef i tθα= + ΔK M K . Entretanto,
tal situação é encontrada, por exemplo, no método dos elementos finitos espectrais
(COHEN, 2002) amplamente utilizado em problemas de propagação de ondas e cuja
matriz massa é por definição diagonal para determinados elementos e onde métodos
implícitos são bastante utilizados. Além disso, caso se queira adotar a matriz massa
consistente, seria interessante utilizar formulações onde a inversa da matriz massa não
apareça explicitamente na condição inicial da função de Green como aquela
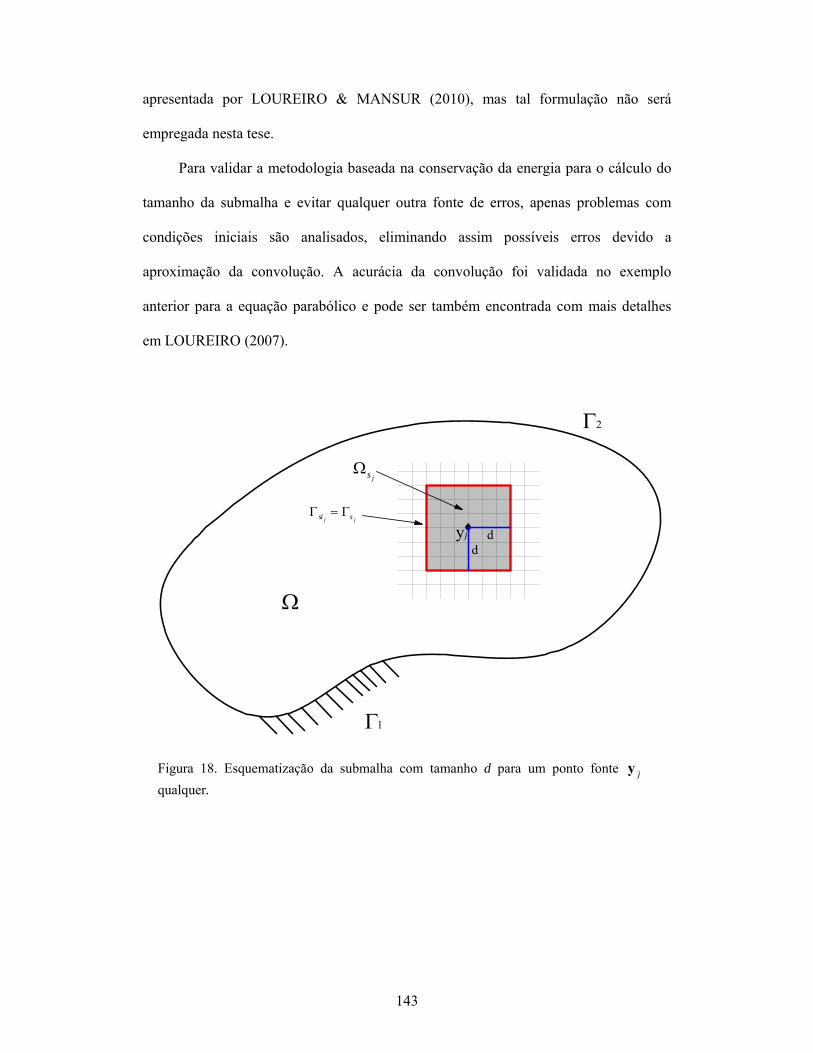
143
apresentada por LOUREIRO & MANSUR (2010), mas tal formulação não será
empregada nesta tese.
Para validar a metodologia baseada na conservação da energia para o cálculo do
tamanho da submalha e evitar qualquer outra fonte de erros, apenas problemas com
condições iniciais são analisados, eliminando assim possíveis erros devido a
aproximação da convolução. A acurácia da convolução foi validada no exemplo
anterior para a equação parabólico e pode ser também encontrada com mais detalhes
em LOUREIRO (2007).
Ω
yj
Γ1
Γ2
dd
j jsi sΓ = Γ
jsΩ
Figura 18. Esquematização da submalha com tamanho d para um ponto fonte jy qualquer.
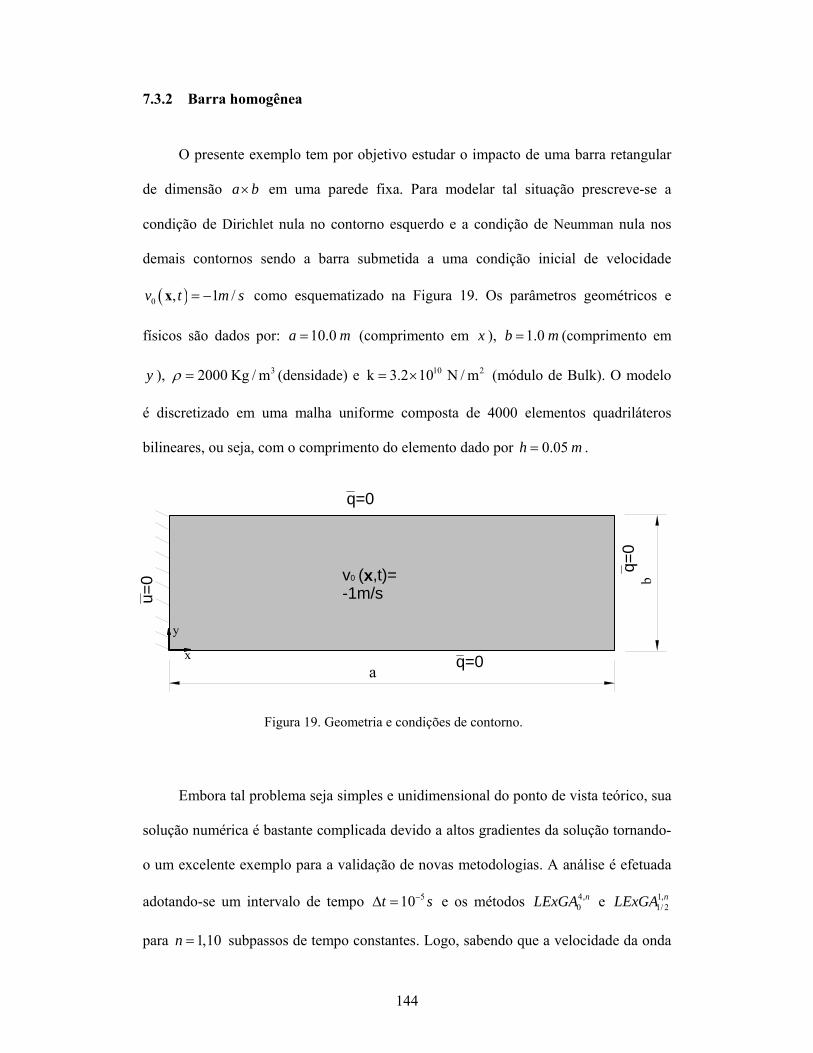
144
7.3.2 Barra homogênea
O presente exemplo tem por objetivo estudar o impacto de uma barra retangular
de dimensão a b× em uma parede fixa. Para modelar tal situação prescreve-se a
condição de Dirichlet nula no contorno esquerdo e a condição de Neumman nula nos
demais contornos sendo a barra submetida a uma condição inicial de velocidade
( )0 , 1 /v t m s= −x como esquematizado na Figura 19. Os parâmetros geométricos e
físicos são dados por: 10.0a m= (comprimento em x ), 1.0b m= (comprimento em
y ), 32000 Kg / mρ = (densidade) e 10 2k 3.2 10 N / m= × (módulo de Bulk). O modelo
é discretizado em uma malha uniforme composta de 4000 elementos quadriláteros
bilineares, ou seja, com o comprimento do elemento dado por 0.05h m= .
Embora tal problema seja simples e unidimensional do ponto de vista teórico, sua
solução numérica é bastante complicada devido a altos gradientes da solução tornando-
o um excelente exemplo para a validação de novas metodologias. A análise é efetuada
adotando-se um intervalo de tempo 510t s−Δ = e os métodos 4,0
nLExGA e 1,1/ 2
nLExGA
para 1,10n = subpassos de tempo constantes. Logo, sabendo que a velocidade da onda
Figura 19. Geometria e condições de contorno.
u=0 b
ax
y
v0 (x,t)= -1m/s
q=0
q=0
q=0
145
é 4000 /c m s= , a área circular da subregião exata para a função de Green no primeiro
intervalo de tempo devido a causalidade é caracterizada pelo raio 0.04r c t m= Δ = e,
portanto, a área da submalha deve ser aquela caracterizada por 0.04d > . O
deslocamento no ponto nodal ( )5,0.5A bem como a velocidade no ponto nodal
( )10,0.5B são plotados nas Figuras 20-23. A solução de refêrencia é aquela obtida
pelos métodos 4,10ExGA e 1,1
1/2ExGA que são equivalentes aos métodos de Runge-Kutta 4º
ordem (RK4) e Newmark-regra trapezoidal (NW) como descrito por LOUREIRO
(2007). Para validar a metodologia baseada na conservação da energia para a
determinação do tamanho da submalha d , as energias computadas utilizando as Eqs.
6.45-6.46 e as Eqs. 6.47-6.48 para os pontos fonte ( )4.45,0.5j =y e ( )0.1,0.1j =y são
mostradas nas Tabelas 4-5. Observe que para ( )4.45,0.5j =y a submalha possui
influência inicialmente somente do contorno interno jsiΓ , enquanto que a submalha
para ( )0.1,0.1j =y possui influência de todos os contornos, i.e., 2 1j j js s siΓ Γ Γ∪ ∪ (ver
Figura 5).
Analisando a Tabela 4 bem como as Figuras 20-21 as seguintes conclusões para
os métodos 4,10LExGA e 4,10
0LExGA podem ser extraídas. Quando 1n = subpasso de
tempo é utilizado, observa-se que para 0.1d = tanto a diferença de energia potencial
h tpEΔΔ quanto a energia potencial h t
pEΔ estão de acordo com as mesmas considerando a
malha global. Entretanto, o mesmo não acontece para a energia cinética, onde os
valores de h tcEΔΔ e h t
cEΔ são diferentes dos valores referenciais (malha global). Já para
0.15d = , todos os valores das energias estão de acordo com os valores referenciais e,
portanto, 0.15d = é suficiente para alcançar resultados precisos. De fato como
observado na Figura 20, resultados precisos são alcançados para 0.15d = , o que não

146
acontece quando se utiliza 0.1d = . Quando 10n = subpassos de tempo é utilizado,
observa-se que as energias para 0.1d = e 0.2d = não estão de acordo com os valores
referenciais e somente para 0.3d = as energias são iguais as referenciais. De fato,
analisando a Figura 21, percebe-se que para 0.1d = e 0.2d = resultados não precisos
são obtidos, enquanto que somente para 0.3d = resultados precisos são alcançados.
Portanto, pode-se concluir que a utilização de subpassos de tempo constantes aumenta
o tamanho da submalha para um mesmo intervalo de tempo. Isto ocorre devido as
várias multiplicações de matrizes referente ao procedimento de subpassos. É importante
ressaltar que esse aumento do tamanho da submalha devido a um aumento do número
de subpassos n para um intervalo de tempo fixo tΔ deve cessar para um determinado
valor de n , pois o princípio da causalidade não pode ser totalmente violado por um
método numérico.
Agora analisando a Tabela 5 bem como as Figuras 22-23 as seguintes conclusões
para os métodos 1,11/ 2LExGA e 1,10
1/ 2LExGA podem ser extraídas. Para 1n = observa-se que
as energias são iguais as referenciais somente quando 0.5d = e que para 0.4d = as
energias possuem um erro muito pequeno. De fato, como observado na Figura 22,
respostas precisas são obtidas somente para 0.5d = . Apesar dos erros das energias para
0.4d = serem pequenos, resultados não precisos são obtidos a medida que o tempo
avança, indicando uma amplificação exponencial desses pequenos erros na solução
final como comentado anteriormente (ver Eq. 6.49). Já para 10n = , as energias são
iguais as referenciais somente para 0.3d = e como observado na Figura 23, resultados
precisos são obtidos somente para 0.3d = (observe que tal tamanho é o mesmo obtido
pelo método explícito 4,100LExGA ). A respeito da influência dos subpassos de tempo
constantes n no método 1,1/ 2
nLExGA e diferentemente do que ocorre para o método
147
explícito 4,0
nLExGA , há uma diminuição do tamanho da submalha quando se aumenta o
número de subpassos n . Isto ocorre porque para o método implícito tem-se a resolução
de um sistema de equações devido a matriz efetiva ef it
nθα Δ
= +K M K e como o
número de subpassos n aparece no denominador, a medida que se aumenta tal valor o
termo relativo a matriz massa torna-se predominante, ou seja, lim efn→∞=K M . Desta
maneira, o método implícito tende a ter as características de um método explícito onde
não há necessidade da resolução de um sistema de equações quando a matriz massa é
diagonal. Logo, o uso de subpassos para métodos implícitos torna-se vantajoso para
diminuir o tamanho da submalha mantendo a característica de estabilidade
incondicional, sendo útil em certas análises onde se queira adotar um número pequeno
de subpassos de tempo n .

148
Tabela 4*. Energias calculadas pelas Eqs. 6.45-6.48 em t t= Δ e diferentes jy para determinação do tamanho da submalha d
considerando o método 4,0
nLExGA com 1,10n = .
Método 4,10LExGA
Submalha ( )4.45,0.5j =y d (m) h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 -21.343013653101240 10× -28.44450231872289 10× 0.1 -52.5890760595552453 10× 0.0 -204245770416841.34 10× -28.44450231872289 10× 0.15 0.0 0.0 -21.343013653101240 10× -28.44450231872289 10×
Submalha ( )0.1,0.1j =y malha global 0.0 0.0 -21.3429776937125095 10× -28.444502318722866 10×0.1 -51.3304974185047308 10× 0.0 -219348714038211 4 3.3 10× -28.444502318722866 10×0.15 0.0 0.0 -21.3429776937125095 10× -28.444502318722866 10×
Método 4,100LExGA
Submalha ( )4.45,0.5j =y d (m) h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 -21.318287709786455 10× -29.09904887482257 10× 0.1 -51.9708946803739802 10× -61.2369609125317815 10× -248215455246231.31 10× -2100636513775689. 10× 0.2 -121.0012199402886779 10× -141.890154699424329 10× -25351.318 875287709 10× -29.0990488749 501 104 × 0.3 0.0 0.0 -21.318287709786455 10× -29.09904887482257 10×
Submalha ( )0.1,0.1j =y Malha global 0.0 0.0 -21.3182332856015859 10× -29.09907389582986 10× 0.1 -51.0098157533510593 10× -6-7.813606500678416 10× -267466995677681 1 9.3 10× -28122632859. 99 89 0 10× 0.2 -134.999889391399392 10× -13-5.12950792952438 10× -25071.318 859233285 10× -29.099073895 0248 108 × 0.3 0.0 0.0 -21.3182332856015859 10× -29.09907389582986 10×
* valores menores que 1710− são considerados nulos e valores grifados em vermelho indicam a não concordância das casas decimais com o valor da malha global.
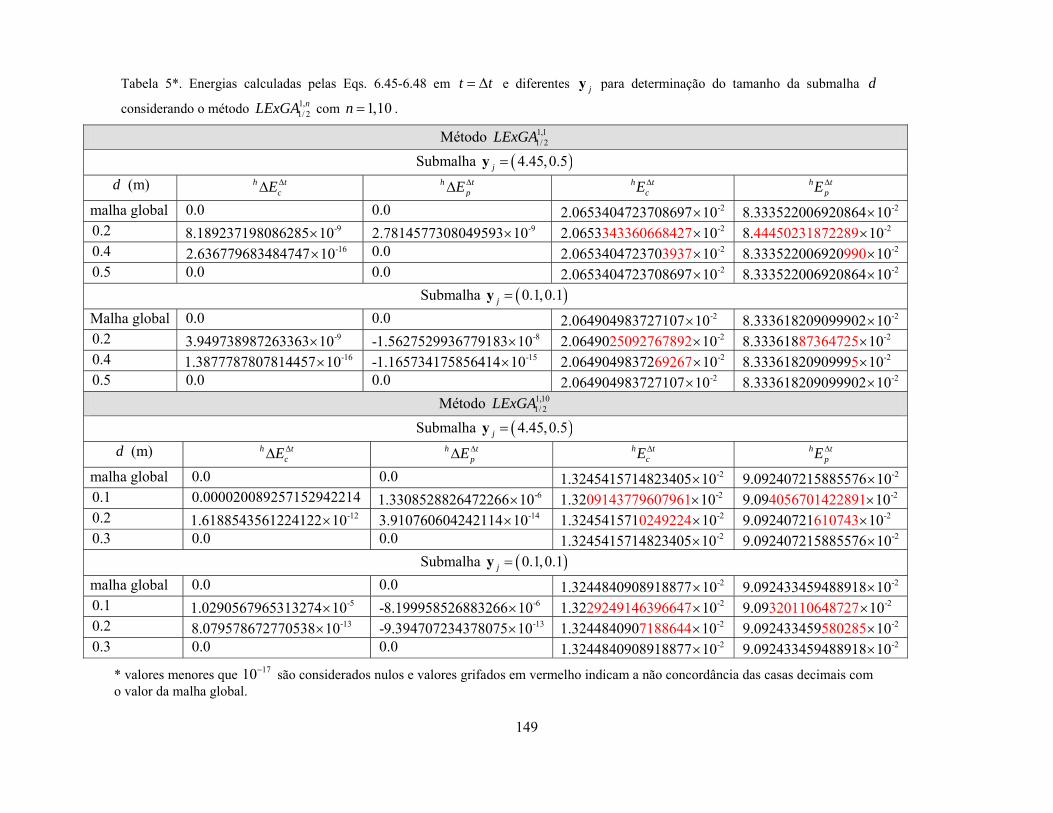
149
* valores menores que 1710− são considerados nulos e valores grifados em vermelho indicam a não concordância das casas decimais com o valor da malha global.
Tabela 5*. Energias calculadas pelas Eqs. 6.45-6.48 em t t= Δ e diferentes jy para determinação do tamanho da submalha d
considerando o método 1,1/ 2
nLExGA com 1,10n = .
Método 1,11/ 2LExGA
Submalha ( )4.45,0.5j =y d (m) h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 -22.0653404723708697 10× -28.333522006920864 10×0.2 -98.189237198086285 10× -92.7814577308049593 10× -23433606684272.0653 10× -2444502318722898. 10× 0.4 -162.636779683484747 10× 0.0 -22.06534047237 39370 10× -28.3335220069 99020 10×0.5 0.0 0.0 -22.0653404723708697 10× -28.333522006920864 10×
Submalha ( )0.1,0.1j =y Malha global 0.0 0.0 -22.064904983727107 10× -28.333618209099902 10×0.2 -93.949738987263363 10× -8-1.5627529936779183 10× -2250927678922.06490 10× -2873647258.333618 10× 0.4 -161.3877787807814457 10× -15-1.165734175856414 10× -22.06490498372 9267 106 × -28.333618209 99509 10× 0.5 0.0 0.0 -22.064904983727107 10× -28.333618209099902 10×
Método 1,101/ 2LExGA
Submalha ( )4.45,0.5j =y d (m) h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 -21.3245415714823405 10× -29.092407215885576 10×0.1 0.000020089257152942214 -61.3308528826472266 10× -209143779607961 2 1.3 10× -240567014228919.09 10×0.2 -121.6188543561224122 10× -143.910760604242114 10× -202491.3245 22441571 10× -261079.092407 4321 10× 0.3 0.0 0.0 -21.3245415714823405 10× -29.092407215885576 10×
Submalha ( )0.1,0.1j =y malha global 0.0 0.0 -21.3244840908918877 10× -29.092433459488918 10×0.1 -51.0290567965313274 10× -6-8.199958526883266 10× -229249146396641 2 7.3 10× -23201106487279.09 10× 0.2 -138.079578672770538 10× -13-9.394707234378075 10× -271881.3244 64484090 10× -25809.092 285433459 10×0.3 0.0 0.0 -21.3244840908918877 10× -29.092433459488918 10×

150
0,000 0,005 0,010 0,015 0,020 0,025 0,030
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
ExGA4,10 = RK4
LExGA4,10 - d=0.1m LExGA4,1
0 - d=0.15m
velo
cida
de B
(m/s
)
tempo (s)
Figura 20. Comparação dos resultados para o método 4,10LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(5,0.5); (b) velocidade no ponto B(10,0.5).
0,000 0,005 0,010 0,015 0,020 0,025 0,030-0,0015
-0,0010
-0,0005
0,0000
0,0005
0,0010
0,0015
0,0020
desl
ocam
ento
A (m
)
tempo (s)
ExGA4,10 = RK4
LExGA4,10 - d=0.1m LExGA4,1
0 - d=0.15m
(a)
(b)
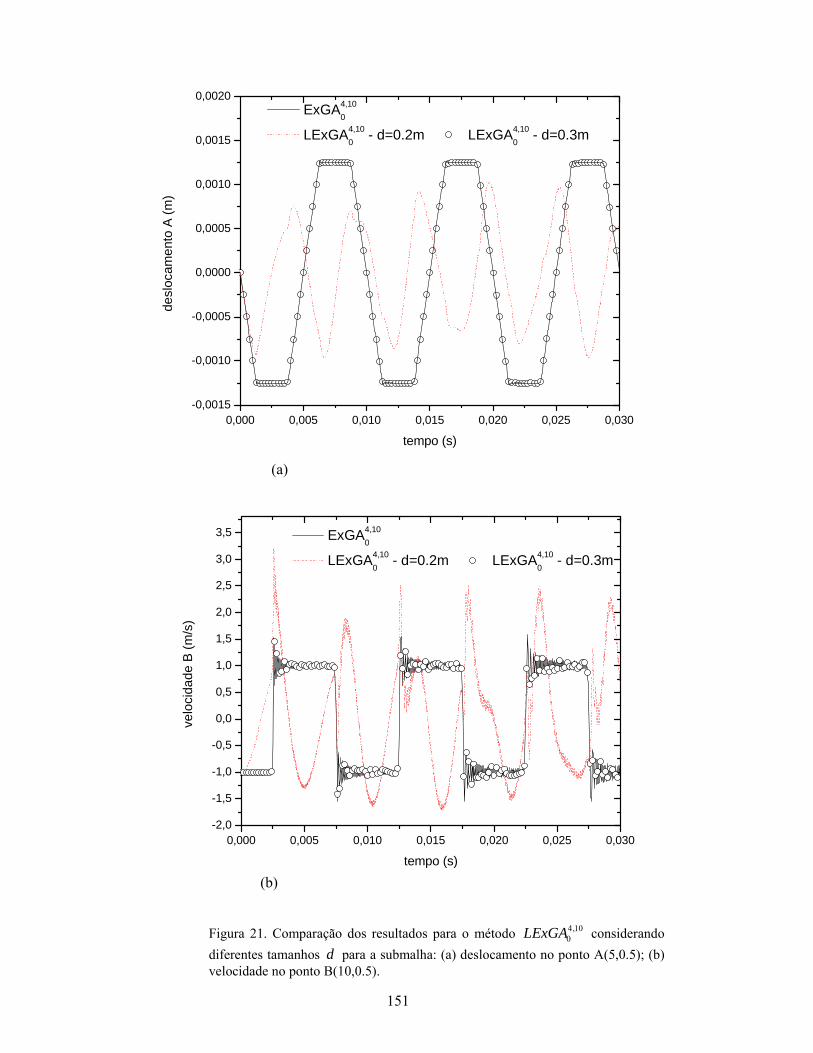
151
Figura 21. Comparação dos resultados para o método 4,100LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(5,0.5); (b) velocidade no ponto B(10,0.5).
0,000 0,005 0,010 0,015 0,020 0,025 0,030-0,0015
-0,0010
-0,0005
0,0000
0,0005
0,0010
0,0015
0,0020 ExGA4,10
0
LExGA4,100 - d=0.2m LExGA4,10
0 - d=0.3m
desl
ocam
ento
A (m
)
tempo (s)
0,000 0,005 0,010 0,015 0,020 0,025 0,030-2,0
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
velo
cida
de B
(m/s
)
tempo (s)
ExGA4,100
LExGA4,100 - d=0.2m LExGA4,10
0 - d=0.3m
(a)
(b)
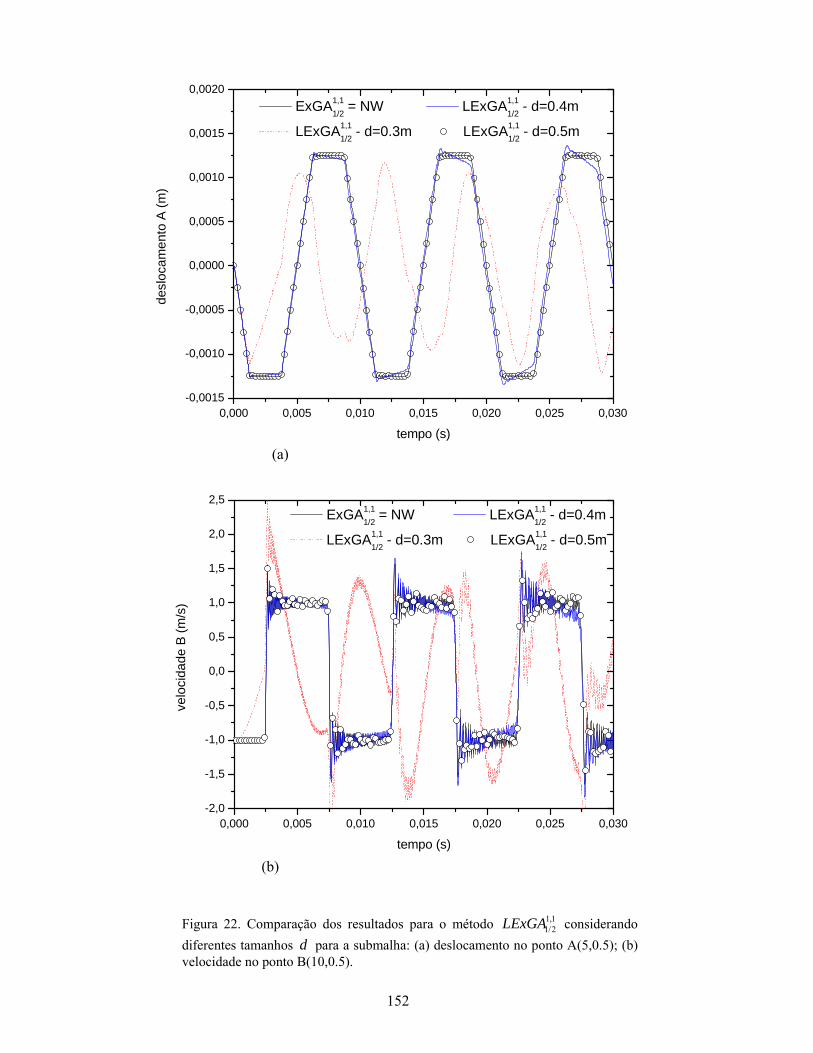
152
Figura 22. Comparação dos resultados para o método 1,11/2LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(5,0.5); (b) velocidade no ponto B(10,0.5).
0,000 0,005 0,010 0,015 0,020 0,025 0,030-0,0015
-0,0010
-0,0005
0,0000
0,0005
0,0010
0,0015
0,0020
desl
ocam
ento
A (m
)
tempo (s)
ExGA1,11/2 = NW LExGA1,1
1/2 - d=0.4m
LExGA1,11/2 - d=0.3m LExGA1,1
1/2 - d=0.5m
0,000 0,005 0,010 0,015 0,020 0,025 0,030-2,0
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
2,5
velo
cida
de B
(m/s
)
tempo (s)
ExGA1,11/2 = NW LExGA1,1
1/2 - d=0.4m
LExGA1,11/2 - d=0.3m LExGA1,1
1/2 - d=0.5m
(a)
(b)

153
Figura 23. Comparação dos resultados para o método 1,101/2LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(5,0.5); (b) velocidade no ponto B(10,0.5).
0,000 0,005 0,010 0,015 0,020 0,025 0,030-0,0015
-0,0010
-0,0005
0,0000
0,0005
0,0010
0,0015
0,0020
desl
ocam
ento
A (m
)
tempo (s)
ExGA1,101/2
LExGA1,101/2 - d=0.2m LExGA1,10
1/2 - d=0.3m
0,000 0,005 0,010 0,015 0,020 0,025 0,030-2,0
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
velo
cida
de B
(m/s
)
tempo (s)
ExGA1,101/2
LExGA1,101/2 - d=0.2m LExGA1,10
1/2 - d=0.3m
(a)
(b)

154
7.3.3 Meio heterogêneo
O presente exemplo modela uma barra quadrangular heterogênea de lados com
dimensão a submetida a uma condição inicial de velocidade dada por 0 15v c= no
contorno ( ){ }0 , : ,0.25 0.75x y y a a x aΓ = = ≤ ≤ . No modelo considerado pescreve-se a
condição de Dirichlet nula nos lados esquerdo e direito, a condição de Neumman nula no
lado superior e a condição não-reflexiva no lado inferior como esquematizado na Figura
24. As propriedades dos materiais são: 1k , 1ρ , 2 14k k= , 2 1ρ ρ= e como conseqüência
tem-se 2 12c c= . Uma malha uniforme composta de 10000 elementos quadriláteros
bilineares, ou seja, com / 0.01h a = é utilizada.
a
a
material 1
material 2
v0=5c1
x
y
u=0
u=0
q=0
1u un c t∂ ∂
= −∂ ∂
0Γ
Figura 24. Geometria e condições de contorno.
155
A análise é efetuada adotando-se os métodos 4,40LExGA e 1,12
1/ 2LExGA e um intervalo
de tempo tal que 1 / 1.5c t hΔ = sendo as soluções de referências obtidas pelos métodos
4,40ExGA e 1,12
1/2ExGA considedrando a malha global (observe que 4n = é utilizado para o
método explícito e 12n = para o método implícito uma vez que neste último o aumento
do número de subpassos de tempo diminui o tamanho da submalha como comentado no
exemplo anterior). Como 2 1c c> e supondo um mesmo intervalo de tempo tem-se que o
tamanho da submalha para o meio 2 é maior que o do meio 1, i.e., 2 1d d> e, portanto,
utiliza-se o tamanho 2d d= como referência. Além disso, os tamanhos exatos para a
subregião obtidos pelo princípio da causalidade no meio 1 e 2 são 1 / 0.015r a = e
2 / 0.03r a = , respectivamente. Os deslocamentos nos pontos nodais ( )A 0.5 ,0.75a a e
( )B 0.5 ,0.25a a são plotados nas Figuras 25-26 e as energias calculadas utilizando as Eqs.
6.45-6.48 para os pontos fonte ( )0.5 ,0.25j a a=y e ( )0.98 ,0.5j a a=y são mostradas nas
Tabelas 6-7. Observe que para ( )0.5 ,0.25j a a=y a submalha possui influência
inicialmente somente do contorno interno jsiΓ estando contida no meio 2, enquanto que a
submalha para ( )0.98 ,0.5j a a=y possui influência dos contornos 1 j js siΓ Γ∪ estando
localizada na interface dos dois meios próximo ao contorno direito.
Como observado na Tabela 6 e nas Figuras 25-26 referente ao método 4,40LExGA , as
energias são equivalentes as da malha global somente quando / 0.09d a = e, portanto,
resultados precisos são obtidos apenas para tal caso. Uma vez que este exemplo não é tão
severo do ponto de vista numérico quanto o anterior e que 2d d= de tal forma que as
submalhas referentes ao meio 1 podem estar sendo calculadas de forma precisa mesma que
as submalhas para o meio 2 não estejam, o resultado numérico para / 0.07d a = possui

156
aparentemente uma precisão razoável embora as energias não estejam totalmente de
acordo com as da malha global. Entretanto, uma análise mais detalhada da solução no
intervalo 110 / 15c t a≤ ≤ revela que a resposta numérica não está de acordo com a solução
de referência obtida pelo método 4,40ExGA como observado nas Figuras 25(a) e 26(a).
Analisando a Tabela 7 bem como a Figura 27, percebe-se que para o método
1,121/ 2LExGA resultados precisos são alcançados somente quando / 0.09d a = . Como
discutido anteriormente tal exemplo não é tão severo e, portanto, a precisão das energias
para / 0.09d a = é suficiente para garantir respostas precisas no domínio temporal
mostrado nos gráficos. Diferentemente do que ocorre para o método 4,40LExGA quando
/ 0.07d a = , resultados numéricos bastante imprecisos são obtidos considerando o método
1,121/ 2LExGA para / 0.07d a = como claramente mostrado na Figura 27.

157
Tabela 6*. Energias calculadas pelas Eqs. 6.45-6.48 em t t= Δ e diferentes jy para determinação do tamanho da submalha d
considerando o método 4,40LExGA .
* valores maiores que 1710− são considerados nulos e valores grifados em vermelho indicam a não concordância das casas decimais com o valor da malha global.
Método 4,40LExGA
Submalha ( )0.5 ,0.25j a a=y /d a h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 31.449574059990229 10× 33.899239146042295 10× 0.05 -52.589076059555245 10× -21.987916775306075 10× 33184645465311.449 10× 33439967234793.899 10× 0.07 -71.351522769255098 10× -92.512933860998600 10× 31.449574059802193 10× 33.899239146134898 10× 0.09 0.0 0.0 31.449574059990229 10× 33.899239146042295 10×
Submalha ( )0.98 ,0.5j a a=y malha global 0.0 0.0 32.053106533077447 10× 33.753553904190254 10× 0.05 -22.8139776187344978 10× -22.859431494107411 10× 30490633775452.053 10× 3776856656753.7535 10× 0.07 -82.2706444724462926 10× -81.298758434131741 10× 32.053106533 457760 10× 33.753553904205848 10× 0.09 0.0 0.0 32.053106533077447 10× 33.753553904190254 10×
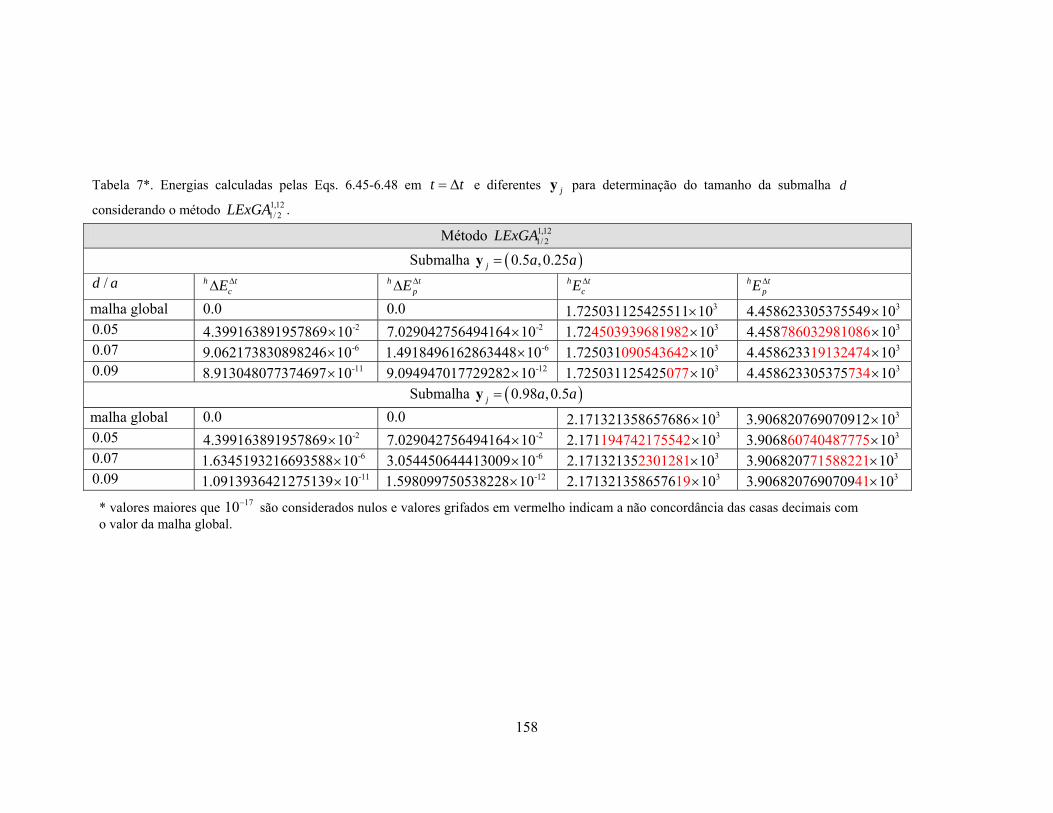
158
Tabela 7*. Energias calculadas pelas Eqs. 6.45-6.48 em t t= Δ e diferentes jy para determinação do tamanho da submalha d
considerando o método 1,121/ 2LExGA .
* valores maiores que 1710− são considerados nulos e valores grifados em vermelho indicam a não concordância das casas decimais com o valor da malha global.
Método 1,121/ 2LExGA
Submalha ( )0.5 ,0.25j a a=y /d a h t
cEΔΔ h tpEΔΔ h t
cEΔ h tpEΔ
malha global 0.0 0.0 31.725031125425511 10× 34.458623305375549 10× 0.05 -24.399163891957869 10× -27.029042756494164 10× 345039396819821.72 10× 37860329810864.458 10× 0.07 -69.062173830898246 10× -61.4918496162863448 10× 309054361.725031 42 10× 3191324.4586 474233 10× 0.09 -118.913048077374697 10× -129.094947017729282 10× 31.725031125 077425 10× 34.458623305 734375 10×
Submalha ( )0.98 ,0.5j a a=y malha global 0.0 0.0 32.171321358657686 10× 33.906820769070912 10× 0.05 -24.399163891957869 10× -27.029042756494164 10× 31947421755422.171 10× 3607404877753.9068 10× 0.07 -61.6345193216693588 10× -63.054450644413009 10× 32302.17 1281132135 10× 3715883.9068 221207 10× 0.09 -111.0913936421275139 10× -121.598099750538228 10× 32.171321358 196576 10× 33.906820769 410709 10×

159
0 2 4 6 8 10 12 14
-0.02
-0.01
0.00
0.01
0.02
0.03
u(A
,t)/a
c1t/a
ExGA4,40 LExGA4,4
0 - d/a=0.07
LExGA4,40 - d/a=0.05 LExGA4,4
0 - d/a=0.09
10 11 12 13 14 15-0.015
-0.010
-0.005
0.000
0.005
0.010
u(A
,t)/a
c1t/a
Detalhe
Figura 25. Comparação dos resultados para o método 4,40LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(0.5a,0.75a); (b) detalhe da solução no ponto A(0.5a,0.75a) para
110 / 15c t a≤ ≤ .
(a)
(b)

160
0 2 4 6 8 10 12 14
-0,005
0,000
0,005
0,010
0,015
u(B,
t)/a
c1t/a
ExGA4,40 LExGA4,4
0 - d/a=0.07
LExGA4,40 - d/a=0.05 LExGA4,4
0 - d/a=0.09
10 11 12 13 14 15
-0,0016
-0,0008
0,0000
0,0008
0,0016
u(B
,t)/a
c1t/a
Detalhe
Figura 26. Comparação dos resultados para o método 4,40LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto B(0.5a,0.25a); (b) detalhe da solução no ponto B(0.5a,0.25a) para
110 / 15c t a≤ ≤ .
(a)
(b)

161
0 2 4 6 8 10 12 14
-0,02
-0,01
0,00
0,01
0,02
0,03
u(A
,t)/a
c1t/a
ExGA1,121/2 LExGA1,12
1/2 - d/a=0.07
LExGA1,121/2 - d/a=0.05 LExGA1,12
1/2 - d/a=0.09
0 2 4 6 8 10 12 14
-0,005
0,000
0,005
0,010
0,015
u(B
,t)/a
c1t/a
ExGA1,121/2 LExGA1,12
1/2 - d/a=0.07
LExGA1,121/2 - d/a=0.05 LExGA1,12
1/2 - d/a=0.09
Figura 27. Comparação dos resultados para o método 4,40LExGA considerando
diferentes tamanhos d para a submalha: (a) deslocamento no ponto A(0.5a,0.75a); (b) deslocamento no ponto B(0.5a,0.25a).
(a)
(b)

162
8 Conclusões
Capítulo 8 Conclusões
A presente tese teve como objetivo generalizar o método da aproximação
explícita de Green (ExGA) para a solução de equações parabólicas e hiperbólicas
utilizando o método dos resíduos ponderados no domínio espaço-tempo como ponto de
partida, proporcionando um ganho conceitual para tal método. Ao invés de proceder
com a discretização simultânea no domínio espaço-tempo optou-se por um
procedimento de semi-discretização, onde as variáveis espacial e temporal são tratadas
de forma independentes, resultando em uma expressão integral semi-discreta escrita em
relação aos pontos nodais no domínio temporal.
Diferentemente do método clássico dos elementos de contorno, onde a função de
Green analítica de meio infinito é utilizada como função peso na equação de resíduos, a
função peso do método ExGA é a função de Green que obedece as condições
homogêneas do problema em questão. Logo, ao invés de se obter uma equação integral
como ocorre no método dos elementos de contorno, no método ExGA obtem-se uma
expressão integral na qual a variável incógnita é calculada diretamente uma vez
conhecida a função de Green do problema em questão. Como a função de Green que
obedece as condições de contorno homogêneas do problema em consideração é
extremamente difícil se não impossível de se obter de forma analítica, no método
ExGA a função de Green é calculada numericamente através do método dos elementos

163
finitos ou outro método numérico. Desta maneira, o método ExGA torna-se bastante
geral no sentido que problemas heterogêneos e/ou anisotrópicos podem ser facilmente
modelados, eliminando uma das grandes desvantagens do método tradicional dos
elementos de contorno. Como resultado do uso do método dos elementos finitos, a
função de Green é expressa por uma matriz de Green, onde cada coluna (ou linha)
denominada de vetor de Green é a resposta do sistema discreto para uma fonte pontual
instantânea aplicada em um determinado ponto nodal da malha de elementos finitos.
Devido as integrais de volume das condições inicias do método ExGA a ao
procedimento de marcha no tempo na qual a solução no instante de tempo kt funciona
como uma condição inicial para o cálculo da solução no instante de tempo 1kt + , todas as
colunas da matriz de Green precisam ser, a priori, computadas. Todavia, as seguintes
vantagens podem ser enumeradas: (i) apenas as matrizes de Green para intervalos
menores e/ou iguais a tΔ precisam ser computadas; (ii) a integral de convolução só
precisa ser calculada no primeiro intervalo de tempo e a solução particular no intervalo
[ ]1,k kt t + . Como foi descrito, a convolução é calculada utilizando o método de
quadratura de Newton-Cotes gerando, portanto, erros de aproximação enquanto que a
solução particular incorpora a parcela das forças externas na solução de forma analítica
sem nenhum tipo de erro. Além disso um processo adaptativo para a solução particular
pode ser eficientemente implementado sem aumentar o custo computacional de forma
significativa visando uma melhor representação das funções de forma referentes as
forças externas em cada intervalo de tempo [ ]1,k kt t + .
Na presente tese os vetores de Green foram computados utilizando o método-θ
em conjunto com um procedimento de subpassos de tempo classificados como
constantes, não-constantes e mistos. O procedimento de subpassos resultou numa
metodologia geral e unificada não somente para a dedução de novos métodos de
164
integração temporal, mas também para estabelecer equivalências entre métodos já
existentes na literatura. Em particular, subpassos de tempo não-constantes são
responsáveis pelo aumento da ordem de acurácia enquanto que os subpassos constantes
apesar de diminuir os erros de truncamento possuem como principal vantagem o
aumento linear do limite crítico de estabilidade nos métodos explícitos. Como descrito
nos exemplos numéricos, resultados com ordem de precisão variável são obtidos com a
utilização de subpassos de tempo, permitindo o uso de intervalos de tempo grandes sem
perda de precisão e requerendo um menor número de passos de tempo. Tal
característica é bastante vantajosa em análises onde longos períodos de tempo são
requeridos.
Com o objetivo de minimizar o custo computacional do cálculo numérico da
matriz de Green, um novo método denominado LExGA (“Local Explicit Green’s
Approach”), baseado no princípio da causalidade, foi proposto para a solução da
equação hiperbólica. Tal método se baseia no cálculo numérico da função de Green
utilizando subdomínios (ou subregiões) com suas respectivas submalhas, construídas
em volta do ponto fonte jy onde a fonte pontual instantânea é aplicada.
Devido a não satisfação do princípio da causalidade devido ao processo de semi-
discretização inerente ao método clássico de elementos finitos, onde as variáveis
espacial e temporal são discretrizadas de forma independentes, o subdomínio discreto
com sua submalha se mostrou maior que o subdomínio teórico definido pelo princípio
da causalidade. Uma vez que o princípio da causalidade não pode ser utilizado como
parâmetro para a determinação do tamanho das submalhas, uma metodologia robusta
baseada no princípio da conservação da energia foi proposta. Tal metodologia
determina o tamanho da submalha calculando as energias cinética e potencial através de
dois critérios. No primeiro critério uma expressão entre a diferença das energias
165
considerando a malha global (ou uma malha suficientemente grande) e a submalha é
utilizado. Já para o segundo critério as energias para cada submalha são computadas de
forma independente e comparadas com as energias de submalhas com tamanhos
maiores que as anteriores através de um processo iterativo.
De fato, como observado nos exemplos numéricos, tal metodologia se mostrou
bastante robusta mostrando claramente quando resultados precisos serão obtidos e vice-
versa. Em particular, a submalha para métodos explícitos se mostrou menor que a
submalha para métodos implícitos considerando o mesmo número de subpassos
constantes de tempo n . Entretanto, diferentemente do que ocorre para os métodos
explícitos, o tamanho da submalha para os métodos implícitos considerando matriz
massa diagonal diminui quando se aumenta o número de subpassos de tempo constante
n .
O autor entende que o método ExGA está ainda no começo de seu
desenvolvimento e, portanto, muitos estudos ainda precisam ser realizados,
principalmente com relação à eficiência computacional. Ao invés de sugerir novos
tópicos de pesquisas que não são poucos, o autor espera que a presente tese esclareça
muitos pontos teóricos sobre o método ExGA e deixa para o leitor buscar seu próprio
caminho na elaboração de novas idéias visando não somente o desenvolvimento de
novas metodologias mas também de aplicações práticas.

166
Referências Bibliográficas ADAMS, R.A., JOHN, J.F.F., 2003, Sobolev Spaces. 2 ed. Academic Press.
AINSWORTH, M., DAVIES, P., DUNCAN, D.B., et al., 2003, Topics in
Computational Wave Propagation and Inverse Problems, Springer.
ARGYRIS, J.H., DUNNE P.C., ANGELOPOULOS, T., 1973, “Dynamic Response by
Large Step Integration”, Earthquake Engineering and Structural Dynamics, v. 2,
pp. 185-203.
ARGYRIS, J.H., VAZ, L.E., WILLAM, K.J., 1977, “Higher Order Methods for
Transient Diffusion Analysis”, Computer Methods in Applied Mechanics and
Engineering, v. 12, pp. 243–78.
ASTLEY, R.J., 1996, “Transient wave envelope elements for wave problems”. Journal
of Sound and Vibration, v. 192, pp.245–261.
ASTLEY, R.J., COYETTE, J.P., CREMERS, L., 1998. “Three dimensional wave
envelope elements of variable order for acoustic radiation and scattering. Part II:
Formulation in the time domain”. Journal of the Acoustical Society of America, v.
103, pp. 64–72.
BATHE, K.J., 1996, Finite element procedures. Prentice-Hall, Englewood Cliffs, New
Jersey.
BECK, J.V., COLE, K.D., HAJI-SHEIKH, A., et al., 1992, Heat Conduction using
Green’s Functions. Series in Computational and Physical Processes in
Mechanics and Thermal Sciences, Hemisphere Publishing Corporation.

167
BESKOS, D.E., 1997, “Boundary element methods in dynamic analysis-II”. Appl.
Mech. Rev. vol. 50, pp. 149-197.
BOYCE, W.E., DIPRIMA, R.C., 2001, Elementary differential equations and
boundary value problems. 7ed. John Wiley & Sons.
CARRER, J.A.M., MANSUR, W.J., 2004, “Alternative time-marching schemes for
elastodynamic analysis with the domain boundary element method formulation”,
Computational Mechanics, v. 34, pp. 387–399.
CARSLAW, H.S., JAEGER, J.C., 1959, Conduction of heat in solids, 2ed. Oxford
University Press, Vivian Ridler, Walton Street, Oxford.
COHEN, G.C., 2002. Higher-order numerical methods for transient wave equations.
Springer.
COLLINO, F., MONK, P., 1998, “The perfectly matched layer in curvilinear
coordinates”. SIAM Journal on Scientific Computing, v. 19, pp. 2061–2090.
COURANT, R., HILBERT, D., 1962, Methods of mathematical physics. Wiley, New
York.
CLOUGH, R.W., PENZIEN J., 1993, Dynamics of Structures. 2 ed. New York,
McGraw-Hill.
DANIEL, W.J.T., 1998, A study of the stability of subcycling algorithms in structural
dynamics, Computer Methods in Applied Mechanics and Engineering, v. 156, pp.
1–13.
168
DIAZ, J., JOLY, P., 2006. “A time domain analysis of PML models in acoustics”.
Computer Methods in Applied Mechanics and Engineering, v. 195, pp. 3820–
3853.
DOMINGUEZ, J., 1993, Boundary Elements in Dynamics, Computational Mechanics
Publications-Elsevier Applied Science, Southampton.
ENGQUIST, B., MAJDA, A., 1979, “Radiation boundary conditions for acoustic and
elastic calculations”. Communications on Pure and Applied Mathematics, v. 32,
pp. 313–357
EYMARD, R. GALLOUËT, T. R. HERBIN, R., 2000, The finite volume method,
Handbook of Numerical Analysis, Vol. VII, 2000, p. 713-1020. Editors: P.G.
Ciarlet and J.L. Lions.
FRANGI, A., 2000, “Causal shape functions in the time domain boundary element
method”, Computational Mechanics, v. 25, pp. 533-541.
FUNG, T.C., 1996, “Unconditionally Stable Higher-Order Accurate Hermitian Time
Finite Elements”, International Journal for Numerical Methods in Engineering, v.
39, pp. 3475-3495.
FUNG, T.C., 1997a, “Unconditionally stable higher-order Newmark methods by sub-
stepping procedure”, Computer Methods in Applied Mechanics and Engineering,
v. 147, pp. 61-84.
FUNG, T.C., 1997b, “A Precise Time-Step Integration Method by Step-Response and
Impulsive-Response Matrices for Dynamic Problems”, International Journal for
Numerical Methods in Engineering, v. 40, pp. 4501-4527.
169
FUNG, T.C., 1999, “Complex-time-step methods for transient analysis”, International
Journal for Numerical Methods in Engineering, v. 46, pp. 1253-1271.
GIVOLI, D., 1991, “Non–reflecting boundary conditions: A review”. Journal of
Computational Physics, v. 94, pp. 1–29.
GRAFF, K. F., 1991, Wave Motion in Elastic Solids. New York, Dover Publications
INC.
GROSU, E., HARARI, I., 2007, “Stability of semidiscrete formulations for
elastodynamics at small time steps”, Finite Elements in Analysis and Design, v.
43, pp. 533-542.
HAIRER, E., NORSETT, S.P., WANNER, G., 1987, Solving Ordinary Differential
Equations I. Springer, Berlin.
HALL, W.S., OLIVETO, G., 2003, Boundary Element Methods for Soil-Structure
Interaction. 1 ed., Springer.
HIGDON, R.L., 1986, “Absorbing boundary conditions for difference approximations
to the multi-dimensional wave equation”, Mathematical of Computation, v. 47,
pp. 437–459.
HILDEBRAND, F.B., 1987, Introduction to Numerical Analysis. 2ed. Dover
Publications.
HUGHES, T.J.R., 2000, The Finite Element Method: Linear Static and Dynamic Finite
Element Analysis. New York, Dover Publications INC.

170
LIU, G.R., QUEK JERRY, S.S., 2003, “A Non-Reflecting Boundary for Analyzing
Wave Propagation using the Finite Element Method,” Finite Elements in Analysis
and Design, v. 39, pp. 403-417.
LOUREIRO, F.S., 2006, Um Procedimento de Marcha no Tempo Baseado em Função
de Green Calculada pelo Método dos Elementos Finitos. Projeto Final, Escola
Politécnica, Departamento de Engenharia Mecânica, Brasil.
LOUREIRO, F.S., 2007, Métodos de integração temporal baseados no cálculo
numérico de funções de Green através do método dos elementos finitos,
Dissertação de M.Sc, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
LOUREIRO, F.S., MANSUR, W.J., VASCONCELLOS, C.A.B., 2009a, “A hybrid
time/Laplace integration method based on numerical Green’s functions in
conduction heat transfer”, Computer Methods in Applied Mechanical
Engineering, v. 198, pp. 2662-2672.
LOUREIRO, F.S., MANSUR, W.J., 2009b, “A new family of time integration methods
for heat conduction problems using numerical Green’s functions”. Computational
Mechanics, v. 44, pp. 519–31.
LOUREIRO, F.S., MANSUR, W.J., 2009c, “A Novel Higher-Order Time Integration
Method Using the Modified Explicit Green’s Approach for Linear Parabolic
Problems”. Numerical Heat Transfer. Part B: Fundamentals, v. 56, pp. 211-230.
LOUREIRO, F.S., MANSUR, W.J., 2009d, “An efficient hybrid time-Laplace domain
method for elastodynamic analysis based on the explicit Green’s approach”.
International Journal of Solids and Structures, v. 46, pp. 3096–102.
171
LOUREIRO, F.S.; SANTOS, J.P.L.; Mansur, W.J., 2009e, “Um método híbrido
tempo/Laplace baseado no algoritmo ExGA aplicado a problemas dinâmicos”.
XXX CILAMCE - Congresso Ibero Latino Americano de Métodos
Computacionais em Engenharia, Armação de Búzios, formulação e análise.
LOUREIRO, F.S., SANTOS, J.P.L., MANSUR, W.J., 2009f, “Modelagem numérica de
problemas acústicos utilizando um método de integração temporal baseado no
cálculo numérico de funções de Green”. Congreso de Métodos Numéricos en
Ingeniería, Barcelona. Métodos Computacionales en Vibraciones y Acústica I.
LOUREIRO, F. S., MANSUR, W.J., 2009g, “An Efficient Hybrid Time/Laplace
Scheme Based on Numerical Green s Functions Applied to Heat Conduction
Problems”. Seventh UK conference on Boundary Integral Methods-UKBIM7,
Nottingham, Inglaterra, Heat transfer.
LOUREIRO, F.S., OYARZÚN, P., SANTOS, J.P.L. et al., 2010, “A hybrid
time/Laplace domain method based on numerical Green’s functions applied to
parabolic and hyperbolic bioheat transfer problems”. XXX CILAMCE - Congresso
Ibero Latino Americano de Métodos Computacionais em Engenharia, Armação
de Búzios, formulação e análise.
LOUREIRO, F.S., MANSUR, W.J., 2010, “A novel time-marching scheme using
numerical Green s functions: A comparative study for the scalar wave equation”.
Computer Methods in Applied Mechanics and Engineering, v. 199, pp. 1502-
1512.
MALVERN, L.E., 1969, Introduction to the mechanics of continuous medium. New
Jersey, Englewood Cliffs.

172
MANSUR, W.J., BREBBIA, C.A., 1982a, “Formulation of the boundary element
method for transient problems governed by the scalar wave equation”, Applied
Mathematical Modelling, v. 6, pp. 307-311.
MANSUR, W.J., BREBBIA, C.A., 1982b, “Numerical implementation of the boundary
element method for two dimensional transient scalar wave propagation
problems”, Applied Mathematical Modelling, v. 6, pp. 299-306.
MANSUR, W.J., 1983, A Time-Stepping Technique to Solve Wave Propagation
Problems Using the Boundary Element Method. Ph.D. Thesis, Southampton
University, UK.
MANSUR, W.J., LOUREIRO, F.S., SOARES, D. JR., et al., 2007, “Explicit time-
domain approaches based on numerical Green’s functions computed by finite
differences – the ExGA family”, Journal of Computation Physics, v. 227, pp.
851–870.
MANSUR, W.J., VASCONCELLOS, C.A.B., ZAMBROZUSKI, N.J.M., et al., 2009,
“Numerical Solution for Linear Transient Heat Conduction Using an Explicit
Green’s Approach”. International Journal of Heat and Mass Transfer, v. 52, pp.
694-701.
MARSDEN, J.E., HUGHES, T.J.R., 1994, Mathematical Foundations of Elasticity.
New York, Dover Publications INC.
MINKOWYCZ, W.J., SPARROW, E.M., MURTHY, J.Y., 2006, Handbook of
Numerical Heat Transfer, 2nd ed., John Wiley & Sons, New Jersey.
173
MORSE, P.M., FESHBACH, H., 1953, Methods of theoretical physics. New York,
Toronto, London, McGraw-Hill.
NEAL, MO, BELYTSCHKO, T., 1989, Explicit-explicit subcycling with noninteger
time step ratios for structural dynamic systems, Computers & Structures, v. 6, pp.
871–880.
OYARZUN, P., LOUREIRO, F.S., CARRER, J.A.M., et al., 2001, “A time-stepping
scheme based on numerical Green’s functions for the domain boundary element
method: The ExGA-DBEM Newmark approach”. Engineering Analysis with
Boundary Elements, v. 35, pp. 533-542.
ÖZIŞIK, M.N., 1993, Heat Conduction. 2 ed. Wiley, New York.
PARTRIDGE, P.W., BREBBIA, C.A., WROBEL, L.C., 1992, Dual Reciprocity
Boundary Element Method, Computational Mechanics Publications,
Southampton, Boston.
QUARTERONI, A., SACCO, R., SALERI, F., 2010, Numerical Mathematics. 3ed.
Springer.
RIVIERE, B., WHEELER, M.F., 2003, Discontinuous finite element methods for
acoustic and elastic wave problems. In ICM2002-Beijing satellite conference on
scientific computing, volume 329 of Contemporary Mathematics, pp. 271–282.
AMS.
SARMA, G.S., MALLICK, K., GADHINGLAJKAR, V.R., 1998, “Non-reflecting
boundary condition in finite element formulation for an elastic wave equation”.
Geophysics, v. 63 , pp. 1006–1016.

174
SCHIFF, J., 1999, The Laplace Transform: Theory and Applications. Springer, New
York.
SELVADURAI, A.P.S., 2000, Partial Differential Equations in Mechanics 1:
Fundamentals, Laplace's Equation, Diffusion Equation, Wave Equation. Springer.
SEMBLAT, J.F., LENTI, L., GANDOMZADEH, L, 2010, “A simple multi-directional
absorbing layer method to simulate elastic wave propagation in unbounded
domains”. International Journal for Numerical Methods in Engineering, v. 42,
pp. 6003–14.
SOARES, JR D., MANSUR, W.J., 2003, “An efficient time/frequency domain
algorithm for modal analysis of non-linear models discretized by the FEM”.
Computer Methods in Applied Mechanics and Engineering, v. 192, pp. 3731–45.
SOARES, JR D., MANSUR, W.J., 2004a, “A Time Domain FEM Approach Based on
Implicit Green’s Functions for Nonlinear Dynamic Analysis”. International
Journal for Numerical Methods in Engineering, v. 62, pp. 664-681.
SOARES JR, D., 2004b, Análise Dinâmica de Sistemas Não Lineares com Acoplamento
do Tipo Solo-Fluido-Estrutura por Intermédio do Método dos Elementos Finitos
e do Método dos Elementos de Contorno. Tese de D.Sc., COPPE-UFRJ, Brasil.
SOARES JR, D., Estorff, O. Von, Mansur, W J., 2004c, “Iterative coupling of BEM
and FEM for nonlinear dynamic analyses”. Computational Mechanics, v. 34, pp.
67-73.
SOARES, JR D., MANSUR, W.J., 2005, “A frequency-domain FEM approach based
on implicit Green’s functions for non-linear dynamic analysis”. International
Journal of Solids and Structures, v. 42, pp. 6003–14.
175
SOARES JR, D., 2007a, “A time-marching scheme based on implicit Green s functions
for elastodynamic analysis with the domain boundary element method”.
Computational Mechanics, v. 40, pp. 827-835.
SOARES JR, D., Mansur, W.J., Estorff, O. Von, 2007b, “An efficient time-domain
FEM/BEM coupling approach based on FEM implicit Green s functions and
truncation of BEM time convolution process”. Computer Methods in Applied
Mechanics and Engineering, EUA, v. 196, pp. 1816-1826.
SOARES JR, D., Sladek, J., Sladek, V., 2009, “Dynamic analysis by meshless local
Petrov-Galerkin formulations considering a time-marching scheme based on
implicit Green's functions”. Computer Modeling in Engineering & Sciences, v.
50, pp. 115-140.
SOARES, JR.D., 2011, “A new family of time marching procedures based on Green’s
function matrices”. Computers & Structures, v. 89, pp. 266-276.
STAKGOLD I., 1979, Green’s Functions and Boundary Value Problems. John Wiley
& Sons, New York.
STEIN, E., DE BORST, R., HUGHES, TJR, 2004, Encyclopedia of Computational
Mechanics, Wiley.
STRANG, G., FIX G., 2008, An Analysis of the Finite Element Method. 2ed.,
Wellesley-Cambridge.
TAMMA, K.K., ZHOU X., SHA D., 2000, “The time dimension: A theory towards the
evolution, classification, characterization and design of computational algorithms
176
for transient/dynamic applications”. Archives of Computational Methods in
Engineering, v. 7, pp. 67–286.
TARNOW, N., SIMO, J.C., 1994, “How to Render Second-Order Accurate Time
Stepping Algorithms Fourth-Order Accurate while Retaining the Stability and
Conservation Properties”, Computer Methods in Applied Mechanics and
Engineering , v. 115, pp. 233-252.
VASCONCELLOS, C.A.B., 2008, Groundwater modeling using explicit Green
approach and the finite element method (in Portuguese), PhD Thesis, UFRJ-
COPPE, Rio de Janeiro/RJ Brazil.
VASCONCELLOS, C.A.B., FERRO, M.A.C., MANSUR, W.J., et al., (2009),
“Numerical Green s function for two-dimensional diffusion equation”. Boundary
Element and Other Mesh Reduction Methods XXXI BEM/MRM 31, Southampton,
Advanced formulations.
WOOD, W.L., 1990, Practical time-stepping schemes. Clarendon Press: Oxford.
WROBEL, L.C., 1981, Potential and viscous flow problems using the boundary
element method, Ph.D. Thesis. University of Southampton, England.
WROBEL, L.C., 2002, The boundary element method: applications in thermo-fluids
and acoustics. John Wiley & Sons, England.
ZAMBROZUSKI, N.J.M., 2010, Análise de problemas difusivos transientes utilizando
o método de aproximação explícita de Green e o método dos elementos de
contorno (in Portuguese), PhD Thesis, UFRJ-COPPE, Rio de Janeiro/RJ Brazil.

177
ZHONG, W.X., WILLIAMS, F.W., 1994, “A Precise Time Step Integration Method”,
Journal of Mechanical Engineering Science, v. 208, pp. 427-450.
ZIENKIEWICZ, O.C., TAYLOR, R.L., ZHU, J.Z., 2005, The Finite Element Method
Its Basis & Fundamentals, 6 ed. Oxford, Butterworth-Heinemann.