Gain-scheduled two-loop autopilot for an aircraft ⋆ - Institut de
6
Gain-scheduled two-loop autopilot for an aircraft ? L. Ravanbod * D. Noll ** * Universit´ e Paul Sabatier, Institut de Math´ ematiques, Toulouse, France (Tel: 0033-561558626; e-mail: [email protected]). ** Universit´ e Paul Sabatier, Institut de Math´ ematiques, Toulouse, France (Tel: 0033-561558624; e-mail: [email protected]) Abstract: We present a new method to compute output gain-scheduled controllers for non-linear systems. We use structured H ∞ -control to pre-compute an optimal controller parametrization as a reference. We then propose three practical methods to implement a control law which has only an acceptable loss of performance with regard to the optimal reference law. Our method is demonstrated in longitudinal flight control, where the dynamics of the aircraft depend on the operational conditions velocity and altitude. We design a structured controller consisting of a PI-block to control vertical acceleration, and another I-block to control the pitch rate. 1. INTRODUCTION We design a vertical acceleration hold system for longitu- dinal flight control of an aircraft, which consists in a gain- scheduled autopilot combining a PI-block to control verti- cal acceleration in the outer loop with a I-block to control the pitch rate in the inner loop. The nonlinear dynamics of the aircraft are represented as a parameter-varying family of linearizations at a large number of trimmed flight conditions, forming the flight envelope E . Aerodynamic flight conditions e ∈E may either be classified by alti- tude/velocity, e =(h, V ), or by Mach/dynamic pressure, e =(M, ¯ q). The way in which we construct gain-scheduled PI-I- controllers K(e) is original in so far as it introduces the H ∞ -control paradigm into the realm of PI-I control, a domain where controllers are generally tuned using heuris- tics, not optimized. We proceed as follows. We introduce a suitable closed-loop performance channel w → z, which reflects the imposed performance and robustness specifi- cations. Then we pre-compute the H ∞ -optimal structured PI-I-controller at every flight point e ∈E , using a plant P (e) representing the linearized open-loop system at flight point e ∈E . In other words, for every e ∈E we pre- compute a solution K * (e) to the structured H ∞ -control problem minimize kT w→z (P (e),K) k ∞ subject to K is a PI-I-controller K stabilizes P (e) internally (1) Roughly, K * (e) stands for the best way to control the system at flight conditions e ∈E instantaneously. Another explanation is as follows: if we could compute an optimal H ∞ -controller K * (e) with the required PI-I-structure in ? Funding by Fondation de Recherche pour l’A´ eronautique et l’Espace under contract Survol, and by Fondation EADS under contract Technicom is gratefully acknowledged. real time t, then we would do this at the flight point e(t) and apply K * (e(t)) to P (e(t)) at that instant. In a second step we use this theoretical control law K * (e), (e ∈ E ) as a reference to construct a more practical scheduled PI-I-controller K(e). This controller should be convenient to embed and to store, and yet should not fall back behind K * (e) in H ∞ -performance by more than a fixed percentage. In other words, an admissible parametrization K(e) has to satisfy kT w→z (P (e),K(e))k ∞ ≤ (1 + α) kT w→z (P (e),K * (e))k ∞ (2) for every e ∈E , where for instance α = 10%. We present three methods to compute such a practical gain-scheduled PI-I autopilot K(e), referred to as (a) by triangulation, (b) by the greedy method, and (c) by fitting. It is interesting to compare our philosophy to existing techniques in parameter-varying control. A widely used ap- proach computes full-order LPV controllers via quadratic stability [4] and LMIs. This gives a stability certificate and allows criteria like H ∞ or H 2 , see [1, 2]. A limitation is that PI-I controllers in a complex closed loop control configuration (as in our example) are not available as long as one wishes to stay with LMIs. More seriously, however, is the fact that this approach is intrinsically conservative due its worst-case point of view. Namely, the smallest γ with max e∈E kT w→z (P (e),K(e))k ∞ ≤ γ (3) is sought, whereas the idea in K * (e), respectively in (2), is to perform as good as possible for every e ∈E . Our study will show that (2) may indeed have huge advantages over (3). Switching LPV control has been considered an alternative, as it uses multiple parameter-dependent Lyapunov func- tions [9, 10], reducing conservatism. But even then one has to accept that the LPV approach within PID control has
Transcript of Gain-scheduled two-loop autopilot for an aircraft ⋆ - Institut de

Gain-scheduled two-loop autopilot for anaircraft ?
L. Ravanbod ∗ D. Noll ∗∗
∗Universite Paul Sabatier, Institut de Mathematiques, Toulouse,France (Tel: 0033-561558626; e-mail: [email protected]).∗∗Universite Paul Sabatier, Institut de Mathematiques, Toulouse,
France (Tel: 0033-561558624; e-mail:[email protected])
Abstract: We present a new method to compute output gain-scheduled controllers fornon-linear systems. We use structured H∞-control to pre-compute an optimal controllerparametrization as a reference. We then propose three practical methods to implement a controllaw which has only an acceptable loss of performance with regard to the optimal reference law.Our method is demonstrated in longitudinal flight control, where the dynamics of the aircraftdepend on the operational conditions velocity and altitude. We design a structured controllerconsisting of a PI-block to control vertical acceleration, and another I-block to control the pitchrate.
1. INTRODUCTION
We design a vertical acceleration hold system for longitu-dinal flight control of an aircraft, which consists in a gain-scheduled autopilot combining a PI-block to control verti-cal acceleration in the outer loop with a I-block to controlthe pitch rate in the inner loop. The nonlinear dynamicsof the aircraft are represented as a parameter-varyingfamily of linearizations at a large number of trimmed flightconditions, forming the flight envelope E . Aerodynamicflight conditions e ∈ E may either be classified by alti-tude/velocity, e = (h, V ), or by Mach/dynamic pressure,e = (M, q).
The way in which we construct gain-scheduled PI-I-controllers K(e) is original in so far as it introduces theH∞-control paradigm into the realm of PI-I control, adomain where controllers are generally tuned using heuris-tics, not optimized. We proceed as follows. We introducea suitable closed-loop performance channel w → z, whichreflects the imposed performance and robustness specifi-cations. Then we pre-compute the H∞-optimal structuredPI-I-controller at every flight point e ∈ E , using a plantP (e) representing the linearized open-loop system at flightpoint e ∈ E . In other words, for every e ∈ E we pre-compute a solution K∗(e) to the structured H∞-controlproblem
minimize ‖Tw→z (P (e),K) ‖∞subject to K is a PI-I-controller
K stabilizes P (e) internally(1)
Roughly, K∗(e) stands for the best way to control thesystem at flight conditions e ∈ E instantaneously. Anotherexplanation is as follows: if we could compute an optimalH∞-controller K∗(e) with the required PI-I-structure in
? Funding by Fondation de Recherche pour l’Aeronautique etl’Espace under contract Survol, and by Fondation EADS undercontract Technicom is gratefully acknowledged.
real time t, then we would do this at the flight point e(t)and apply K∗(e(t)) to P (e(t)) at that instant.
In a second step we use this theoretical control lawK∗(e), (e ∈ E) as a reference to construct a morepractical scheduled PI-I-controller K(e). This controllershould be convenient to embed and to store, and yet shouldnot fall back behind K∗(e) in H∞-performance by morethan a fixed percentage. In other words, an admissibleparametrization K(e) has to satisfy
‖Tw→z (P (e),K(e))‖∞ ≤ (1 + α) ‖Tw→z (P (e),K∗(e))‖∞(2)
for every e ∈ E , where for instance α = 10%. We presentthree methods to compute such a practical gain-scheduledPI-I autopilot K(e), referred to as (a) by triangulation,(b) by the greedy method, and (c) by fitting.
It is interesting to compare our philosophy to existingtechniques in parameter-varying control. A widely used ap-proach computes full-order LPV controllers via quadraticstability [4] and LMIs. This gives a stability certificateand allows criteria like H∞ or H2, see [1, 2]. A limitationis that PI-I controllers in a complex closed loop controlconfiguration (as in our example) are not available as longas one wishes to stay with LMIs. More seriously, however,is the fact that this approach is intrinsically conservativedue its worst-case point of view. Namely, the smallest γwith
maxe∈E‖Tw→z (P (e),K(e))‖∞ ≤ γ (3)
is sought, whereas the idea in K∗(e), respectively in (2), isto perform as good as possible for every e ∈ E . Our studywill show that (2) may indeed have huge advantages over(3).
Switching LPV control has been considered an alternative,as it uses multiple parameter-dependent Lyapunov func-tions [9, 10], reducing conservatism. But even then one hasto accept that the LPV approach within PID control has

strong limitations. For example: variable parameters aremeasured precisely, but are not included in the state space[11, 5, 9]. The output matrix is parameter independent andfull row rank [12].
On the practical side there exists a large variety of tech-niques to tune PID controllers and PID architectures, bothfor LTI and parameter-varying systems. Since the 1960sempirical gain-scheduling control has been used for non-linear and time varying systems. This achieves closed loopstability for slowly varying parameters, but in contrastwith H2 and H∞ techniques, no optimality in any sense isachieved.
The paper is structured as follows. In Section 2 we discussthe non-linear open-loop model. In Section 3 we explainhow the system is linearized at the flight points e in theflight envelope E and then the H∞-synthesis scheme takinginto account the control law specifications at each flightpoint e is determined. Then the pointwise optimal struc-tured H∞ controller is constructed. Practical scheduledPI-I-controllers are constructed in Sections 4 – 6.
2. NONLINEAR AIRCRAFT MODEL
We have used a nonlinear aircraft model available in thefile rct airframe1 of simulink used within MatlabR2010b.This is a 3 degree-of-freedom model in longitudinal mode.Compared to the 6 degree-of-freedom model it is assumedthat p = v = r = Φ = ψ = Ye = 0. For a description ofthe complete model see [16, 15].Equations of motion are:
u = −g sin(θ)− qw + ax + FT /mw = g cos(θ) + qu+ azθ = qq = M/IyXe = u cos(θ) + w sin(θ)
Ze = −u sin(θ) + w cos(θ)
(4)
where
ax =qS
m(Cxα(α,M) + Cxl0 · δe) ,
az =qS
m(Czα(α,M) + Czl0 · δe) ,
and Xe, Ze [m]: x, z-position w.r.t. earth, h = −Zealtitude, u, w [m/s]: longitudinal and normal velocities,V [m/s]: total aircraft velocity, θ [rad]: pitch angle,q [rad/s]: pitch rate, δfin = δe [rad] elevator angle, Iy:moment of inertia about y body axis, M : Mach number,M : aerodynamic moment, m: mass, S : wing surface area,q: dynamic pressure, Cxl0 and Czl0: the constants, Cxt andCzt : aerodynamic coefficients. In the present study thethrust FT is held constant at 1000 N.For synthesis the system (4) is linearized at the varioustrimmed flight points e = (h, V ) ∈ E . The system isconsidered to be stabilized via K], which is for simplicitychosen independent of e ∈ E . The PI part of K] (az controlin the lower image of Figure 1) is kp + ki
s = 0.003 + 0.01s ,
the static q-gain is kg = 1.5.This system is then reduced to a family of second-ordermodels for the short-period longitudinal motion[
dVdq
]=
[A11(h, V ) A12(h, V )A21(h, V ) A22(h, V )
] [dVdq
]+
[B21(h, V )B22(h, V )
]dδe
indexed by the flight points e = (h, V ), where V (t) = V +dV (t), q(t) = q(h, V ) + dq(t), δe(t) = δe(h, V ) + dδe(t)represent offsets about nominal values at (h, V ). Outputsare az(t) = az(h, V ) + daz(t) and q(t) = q(h, V ) + dq(t).In our study we use a rectangular grid in the (h, V )-plane
h ∈ [1500, 12000]m,∆h = 525 (21 steps)
V ∈ [700, 1150]m/s2,∆V = 15 (31 steps)
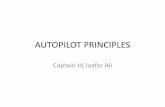
leading to a total of 21 · 31 = 651 flight points e = (h, V )forming the flight envelope E (see Figure 2 left ).
3. H∞ CONTROL
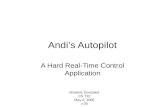
For synthesis the parameter-varying model (5) has to becompleted into a plant P (e) = P (h, V ) by adding distur-bances (wind gusts), reference input signals, and perfor-mance and robustness channels. This parameter-varyingplant P (e) will be described in the following section andused to synthesize a scheduled PI-I controller.The H∞-control scheme used to synthesize a gain-scheduled controller is shown in Figure 1 (b). In thisarchitecture, the tunable elements include the two PI con-troller gains (“az Control” block) and the pitch-rate gain(“q Gain” block). The autopilot must respond to a stepcommand az,ref in about 1 second with minimal overshoot.
In view of the response time requirement, the targetcrossover frequency ωc is set to 2 rad/s and the target
loop shape LS(s) =1+0.001 s
ωc
0.001+ sωc
is used. It can be shown
that if the peak gain of the closed-loop transfer from w toz is close to 1, then
• The open-loop response approximately matches thetarget loop shape LS(·);
• The worst-case sensitivity is close to 1, which ensuresgood stability margins for the outer loop;
• The overshoot in the response to an az,ref step com-mand is small;
• The gain from d to az does not exceed m = 1000.
To fix the filter m we have used the specific flight pointh = 3050 m and V = 984 m/s, where the peak gain fromd to az is 60 dB, meaning that m should be at least 60dB, or m = 1000. In order to satisfy these control lawspecifications, the closed-loop performance channel w → zwith w = (az,ref ,md, LS(s)n) and z = (LS(s)e, az) ischosen.
This is now where our new control strategy sets in. Foreach of the 651 points e = (h, V ) in the flight envelope Ewe compute an H∞-optimal PI-I controller K∗(e) usingthe optimization program (1). To solve (1) we use theMatlab function HINFSTRUCT [MatlabR2010b], whichis based on the fundamental work [3]. The rationale ofHINFSTRUCT relies on non-smooth optimization andcan be found in [3] or [13]. For details on the use ofHINFSTRUCT see [MatlabR2010b].
The closed-loop performance graph
(h, V ) 7→ ‖Tw→z (P (h, V ),K∗(h, V )) ‖∞is shown on the right of Figure 2.
Using the optimal controller K∗(e) would require storing651× 5 numerical values (3 gains for each (h, V ) and h, V

d
s01.0003.0 +
s1
5.1
system
azrefqe
q
n
refaz
(a)
Plant
m1
LS1
LS
refaz
d
n
az
e
(b)
qGain
PI0
0
refq
δ
e
PI qGain
w z
Fig. 1. Schemes used for (a): linearizing the non linearaircraft, (b) H∞ synthesis
0 1 2 3 4 5 6 7
x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4flight envelope
dynamic pressure
Mac
h
0
5000
10000
15000
600
800
1000
12001.6
1.7
1.8
1.9
2
2.1
Height [m]
Optimal performance
Velocity [m/s]
Fig. 2. Left image shows flight envelope E in the geometry(M, q). Right image plots optimal H∞ performanceover E , now in the geometry e = (h, V ).
themselves), plus the rules to look values up in the table.Our goal is therefore to find parameterizations K(e) whichare easier to handle and need less storage, but at the sametime show acceptable performance in the sense of rule (2),where our experiments use α = 10%. We subsequentlydescribe the three approaches, termed (a) by triangulation,Ktri(e), (b) by the greedy method, Kgreedy(e), and (c) byinterpolation of gains Kint(e).
4. TRIANGULATION
In this approach one constructs a triangulation of theflight envelope E such that every node ei is in E andthe triangulated controller Ktri(ei) coincides with K∗(ei)at the ei. Within each triangle ∆ijk with corners ei =(hi, Vi), ej = (hj , Vj), ek = (hk, Vk) oriented clockwiseand e = (h, V ) ∈ E ∩∆ijk the function kp(e) is defined askp(h, V ) = ah+ bV + c, where
0 1 2 3 4 5 6 7
x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4Triangular based approach, 12 controllers
dynamic pressure
Mac
h
0
5000
10000
15000
600
800
1000
12001.6
1.8
2
2.2
2.4
2.6
Height [m]
Performance obtained by triangulation (12 controllers)
Velocity [m/s]
0 1 2 3 4 5 6 7
x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4Triangular based approach, 35 controllers
dynamic pressure
Mac
h
0
5000
10000
15000
600
800
1000
12001.6
1.7
1.8
1.9
2
2.1
Height [m]
Performance obtained by triangulation (35 controllers)
Velocity [m/s]
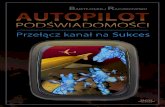
Fig. 3. Two triangulations together with the performancegraphs (h, V ) 7→ ‖Tw→z (P (h, V ),K(h, V )) ‖∞ areshown. The controller K(h, V ) is linear on each trian-gle and coincides with K∗(h, V ) at the nodes ei. Thefiner triangulation satisfies (1), the coarser fails.[abc
]= Q−1
[kp(ei)kp(ej)kp(ek)
]with Q =
[hi Vi 1hj Vj 1hk Vk 1
]. (5)
Computation of ki(h, V ) and kg(h, V ) is analogous. In thisway Ktri(e) is piecewise affine on the triangles ∆ijk andcontinuous as a function of (h, V ). The triangulation isacceptable if, according to (2), the closed-loop performanceof Ktri(e) does not exceed 110% of the performance ofK∗(e) at each of the 651 flight points e ∈ E . Figure 3shows two examples. The controller constructed by theupper triangulation with 11 triangles (and 12 nodes) is notacceptable, because the performance exceeds the 110%.The lower triangulation needs 35 triangles (with 45 nodes)and leads to an acceptable controller. For each node 5informations (3 for controller parameters and 2 for h, V )must be stored.In [8] a related approach based on a triangulation ofthe flight envelope is developed. The authors treat theproblem by a receding horizon model-based predictivecontrol method. To conclude, for each point (h, V ) in theflight envelope, the controller Ktri(h, V ) can be found if45·5 = 225 data and an algorithm to find to which triangleh, V belongs are stored.
5. THE GREEDY METHOD
A very natural way to construct a controller parametriza-tion Kgreedy(e) goes as follows. For a given flight pointe = (h, V ) ∈ E pick the optimal controller K∗(e) andapply it not only to P (e) but also to neighboring plantsP (e′). As long as e′ is close to e, we expect K∗(e) to workwell for P (e′), but eventually, as e′ gets farther away frome, we expect a loss of performance or even stability. Wetherefore define a neighborhood of e ∈ E as follows:
N (e) ={e′ ∈ E : K∗(e) stabilizes P (e′) internally, and
‖Tw→z
(P (e′),K∗(e)
)‖∞ ≤ (1 + α)‖Tw→z
(P (e′),K∗(e′)
)‖∞}
The meaning of N (e) is simply that K∗(e) works accept-ably (in the sense of (2)) on this set. Naturally, we have

0 1 2 3 4 5 6 7x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4flight envelope
dynamic pressure
Mac
h
(a)
0 1 2 3 4 5 6 7x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4flight envelope
dynamic pressure
Mac
h
(b)
Fig. 4. Example of pre-processing of the regions N (e). (a)without smoothing , (b) with smoothing.
e ∈ N (e), so that {N (e) : e ∈ E} is a set-covering of E .Extracting a subcover with a minimum number of elementsis now an instance of the so-called minimum set-coveringproblem. To solve it we use a heuristic, called the greedymethod, hence the name for the controller so constructed.The greedy method is extremely simple and works asfollows. Pick the largest neighborhood N1 := N (e1). Now{N (e) \ N1 : e ∈ E} is a set cover of E \ N1. Pick N2 :=N (e2) such that N (e2) \ N1 is the largest element in thisreduced cover. Now E \ (N1 ∪N2) is covered. Continue inthis way until a cover of E is found. The original cover con-sists of 651 neighborhoods N (e), e ∈ E . Before applyingthe greedy algorithm, we have the option to do some pre-processing of these 651 sets N (e). We eliminate isolatedpoints and use image processing methods to smoothenthe boundaries of the N (e). As we are dealing with 0-1 images, this is simple to perform, for instance, medianfiltering has an immediate effect, where neighborhoods areslightly reduced to a more pleasant form. Figures 4 showsome of the neighborhoods obtained by this procedure.While this greedy procedure is simple to carry out, theobtained controller parametrization is piecewise constant,Kgreedy(e) = K∗(ei) when e ∈ N (ei), and thereforediscontinuous. This is demonstrated by the performancegraph shown in Figure 6, right. We mention that it isadvisable to use hysteresis to avoid chattering effects alongthe region boundaries. Formally, a switching controllerwith hysteresis is not a function of e = (h, V ) alone, buta function of (e, e), where e indicates the direction alongwhich e is reached. The fact that the performance graphof the greedy controller Kgreedy(e) is discontinuous doesnot mean that its performance is unsatisfactory. The factthat (2) is respected everywhere assures that performanceof Kgreedy(e) is very similar to the performance of K∗(e)and Kint(e). To conclude, without any specification on thegeometrical form of the regions found by greedy (as in ourcase), for each point e) in the flight envelope, in additionto its h, V informations, we must also store to whichof the regions it belongs. Hence, to find the controllerKgreedy(h, V ) (651 − 7) · 3 + 7 · 3 = 1953 data must bestored.
6. FITTING APPROACH
One may consider K∗(e) itself as a valid controllerparametrization, with the drawback that it needs storageof 651 · 5 numbers (5 because of h, V and 3 controllerparameters). If this is considered too large, the idea arisesto represent the numerically defined optimal gains k∗i (e),
k∗p(e), k∗g(e) by approximations ki(e), kp(e), k(e), whichare simpler to compute. This leads to methods where the
Fig. 5. 7 regions N (ei) which cover E for which Kgreedy(e)respects the 10% performance error margin (2).
0
5000
10000
15000
600
800
1000
12001.6
1.7
1.8
1.9
2
2.1
Height [m]
Optimal performance
Velocity [m/s] 0
5000
10000
15000
600
800
1000
12001.4
1.6
1.8
2
2.2
2.4
2.6
Height [m]
Performance obtained by greedy approach
Velocity [m/s]
Fig. 6. Performance optimal (left) and its estimation bygreedy (right)
gains k∗i (e) etc. are fitted individually. The resulting con-
troller will be denoted by Kint(e) = [ki(e), kp(e), k(e)]. Afirst idea is to approximate the optimal controller parame-ters k∗i (h, V ), k∗g(h, V ) k∗p(h, V ) using bilinear expressions:
ki(h, V ) = ai + bih+ ciV + dihV
The coefficients ai, bi, ... are found using non-linear leastsquares,
minai,bi,ci,di
∑e∈E
|k∗i (e)− ki(e; ai, bi, ci, di)|2. (6)

The same thing for kg(h, V )and kp(h, V ) . The difficultyhere is that approximation needs a tolerance level ineach individual gain, while our criterion (2) governs theprecision of approximation in closed-loop performance.And indeed, despite a fairly acceptable estimation er-ror in the optimal controller parameters in (6), the ap-
proximation K(e) of K∗(e) so obtained performs very
badly in the sense that ‖Tw→z(P (e), K(e))‖∞ is far from‖Tw→z(P (e),K∗(e))‖∞. Closer inspections shows that thereason for this is the highly nonlinear dependence of theclosed-loop performance on the controller parameters. We
found that the error in kp(e) was the most important. Wetherefore decided to approximate k∗p(e) more accurately,leading to a second approximation Kint(e) where (2) is
satisfied. We still use bilinear interpolation for ki and
kg, but for k∗p we construct an approximation kp withhigher accuracy, where the flight envelope E is dividedinto 7 · 7 = 49 regions, the grid of variation of altitudeand velocity for those regions being
hr = [1500, 2025, 2550, 5175, 5700, 8325, 9375, 12000] m
Vr = [700, 835, 895, 910, 1030, 1075, 1135, 1150] m/s.
The (hr(i), Vr(i)), i = 1, ..., 7 correspond to the coor-dinates of 7 controllers found by the greedy approach,completed by (hr(8), Vr(8)).The corresponding parameter values kp(hr(i), Vr(j)), i, j =1, .., 8 form an 8 × 8 table. For each h and V , 2D in-terpolation (linear regression) is used to find the corre-sponding kp(h, V ). Figure 7 shows the improvement inthe estimation of closed-loop performance obtained thanksto the regions found by the greedy approach. Condition
(3) is satisfied. The gain kp is affine on each of the 49regions. To conclude, for each point (h, V ) in the flightenvelope E , the controller Kint(h, V ) can be found if 2 · 4parameters of the bilinear models (for ki and kg) and
8 · 8 + 2 · 8 = 80 parameters of the table (for kp). A totalof only 88 parameters must be stored.
7. STABILITY
Our control strategy is an extension of [14], where non-linear plants scheduled at the output are discussed, andfrom where the concept of frozen system and instantaneouscontrol originates. In that approach the authors obtainsufficient conditions for stability and performance of thenonlinear system, where performance is with regard to theglobal behavior w → z. Unfortunately, the sufficient con-ditions in [14] are strong and difficult to check in practice.
In contrast with that classical approach we synthesize thebest controller K∗(e) at every flight point e, so our designK∗(e) is optimal at every instant. As long as condition(1) holds, this remains approximately true for the threepresented practical controllers and has the advantage thatthe closed-loop system is dissipative in the sense of [6].This guarantees input-output stability, so that in order toprove internal stability, a property called z-detectabilitysuffices, see [6, Theorem 2.1.3]. The system (P,K) is z-detectable if w, z ∈ L2 imply x ∈ L2. While this appearsto be just as difficult to verify as the conditions in [14],we believe this condition to be much more intuitive, as itclaims some sort of minimality of the model, and thereforeaugments the plausibility of our approach. In the absence
0
5000
10000
15000
600
800
1000
12001.2
1.4
1.6
1.8
2
2.2
x 10−3
Height [m]
Ki: real and approximation by bilinear interpolation
Velocity [m/s] 0
5000
10000
15000
600
800
1000
12000.5
1
1.5
2
2.5
3
3.5
Height [m]
Kg: real and approximation by bilinear interpolation
Velocity [m/s]
0
5000
10000
15000
7008009001000110012000
0.002
0.004
0.006
0.008
0.01
Height [m]
Kp: real and approximation by bilinear interpolation
Velocity [m/s]0
5000
10000
15000
600
800
1000
12001.4
1.6
1.8
2
2.2
2.4
2.6
Height [m]
Real and estimated performance
Velocity [m/s]
0
5000
10000
15000
600
800
1000
12000
0.002
0.004
0.006
0.008
0.01
Height [m]
Kp: real and approximation by linear regression
Velocity [m/s] 0
5000
10000
15000
600
800
1000
12001.6
1.7
1.8
1.9
2
2.1
Height [m]
Real and estimated performance(Kp approximated by linear regression)
Velocity [m/s]
Fig. 7. Approximation of the controller parameters, ki, kgand two approximations of kp. The estimated closed-loop performance is shown in each case.
0 1 2 3 4 5 6 7
x 105
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Dynamic pressure
Mac
h
Flight envelope and trajectories (solid:optimal, dotted: fitting)
0 2 4 6 8 10 12-50
0
50
100
150
200
250Vertical acceleration (solid:optimal, dotted: fitting) and noise (dashed)
Time [s]
a z,n [
m/s
2 ]
0 2 4 6 8 10 12-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1Control input (solid:optimal, dotted: fitting) and disturbance (dashed)
Time [s]
δ fin,
d [d
eg]
980 1000 1020 1040 1060 1080 11002000
4000
6000
8000
10000
12000
14000Velocity-Altitude trajectory (solid:optimal, dotted: fitting)
Velocity [m/s]
Hei
ght
[m]
Fig. 8. Vertical acceleration hold for high altitude. Kint
is used. The parameter trajectories (M(t), q(t)) arepractically identical (upper left). Elevator deflectionδe(t) (lower left) and velocity V (t) (lower right) arealmost identical. Disturbance in δe is shown as dashedline in lower left image, noise in vertical accelerationis shown in upper right image.

of certificates for global stability on E , one has to relyon numerical testing to ensure internal stability. Noticethat conservative approaches like parametric stability cer-tificates fail in the present situation. On the other hand,local stability is ensured in each of the three cases byconstruction.
8. CONCLUSION
We have introduced the pointwise optimal H∞ PI-I con-troller K∗(e), e ∈ E , which could be understood as thebest way to control the system instantaneously in givenflight conditions e = (h, V ), if real-time H∞ control waspossible. As this is not the case, we pre-calculated andstored K∗(e) at the 651 points of the flight envelope E . Ifbeing too costly to embed, we have proposed three approx-imations Ktri(e),Kgreedy(e),Kint(e) of K∗(e), where (a)Ktri(e) is piecewise affine on a triangulation, (b)Kgreedy(e)is piecewise constant with or without hysteresis, and (c)Kint(e) uses interpolation of the gain functions. All ap-proximations use the ideal graph K∗(e) as a reference toguarantee an acceptable performance level in closed loop.The resulting controllers have been compared and tested inclosed-loop. While little differences occur in performance,the storage requirements vary between (a), (b) and (c).
The greedy controller Kgreedy(e) is a good candidate,which needs only 7 exemplars K∗(ei), i = 1, . . . , 7 inorder to stay within the 10% allowed loss of performance.In exchange, without specification the geometrical formthe region, for each one of the 651 points we must storethe information concerning h, V and to which of the 7regions it corresponds, so that we need to store 1953data. The drawback (if any) of this controller is that theapproximation of the performance graph is rather rough.
The controller Ktri(e), obtained by linear interpolationon a triangulation of E , has the advantage of beingcontinuous in (h, V ) ∈ E , which leads to a rather smoothapproximation of the performance graph. We need tostore 225 data. It may be interesting to elaborate moresophisticated method to construct coarser triangulationsrequiring less storage.
Finally, the controller Kint(e) obtained by individual ap-proximation or fitting of the gains k∗i (e), k∗p(e), k∗g(e), givesthe best reduction in storage. Only 88 informations haveto be stored thanks to affine approximation of k∗p(e) inthe flight envelop regions found by the greedy approach.Kint(e) needs 1/22.2 storage as compared to Kgreedy(e),1/2.6 as compared to Ktri(e) and 1/37 compared to K∗(e).This controller is also continuous as a function of (h, V ).The closed-loop time based responses in the presence ofperturbation and measurement noise show very good ac-cordance with the most accurate controller, K∗(e), thecontroller which implies storing 37 times plus the data.Thus, in this study, an mixed approach based on thegreedy and fitting gives the best results.
ACKNOWLEDGEMENTS
Funding by Fondation de Recherche pour l’Aeronautiqueet l’Espace under contract Survol, and by Fondation EADSunder contract Technicom is gratefully acknowledged.
REFERENCES
[1] P. Apkarian, P. Gahinet. A convex characterizationof gain-scheduled H∞ controllers. IEEE Transactionon Automatic Control, 40:853–864, 1995.
[2] P. Apkarian, P. Gahinet, G. Becker. Self-ScheduledH∞ control of linear parameter-varying systems: Adesign example. Automatica, 31:1251–1261, 1995.
[3] P. Apkarian, D. Noll. Nonsmooth H∞-control. IEEETransactions on Automatic Control, 51:71–86, 2006.
[4] G. Becker, R. Mantz. Robust performance of linearparametrically varying systems using parametrically-dependent linear feedback. Systems and ControlLetters 23 ,205–213, 1994.
[5] Yolanda Bolea, Vicenc Puig and Joaquim Blesa.Gain-scheduled Smith PID controllers for LPV sys-tems with time varying delay: Application to an open-flow canal. Proc. of IFAC, Korea, 14564–14569, 2008.
[6] J.W. Helton, M. R. James. Extending H∞ controlto nonlinear systems. SIAM Advances in Design andControl, Philadelphia, 1999.
[7] S. D. Jenie, A. Budiyono. Automatic flight controlsystem – classical approach and modern control per-spective. Lecture Notes, Bandung Institute of Tech-nology, Indonesia, 2006.
[8] T. Keviczky, G.J. Balas. Receding horizon controlof an F-16 aircraft: A comparative study. ControlEngineering Practice, 14,1023–1033, 2006.
[9] B. Lu, F Wu. Switching LPV control design usingmultiple parameter-dependent Lyapunov functions.Automatica 40,1973–1980, 2004.
[10] B. Lu, F Wu, S.W. Kim. Switching LPV control of anF-16 aircraft via controller state reset. IEEE Trans.On control Systems Technology, 14(2),267–277,2006.
[11] M. Mattei. Robust multivariable PID control for lin-ear parameter varying systems. Automatica 37,1997–2003, 2001.
[12] M. Mattei and V. Scordamaglia. A Full EnvelopeSmall Commercial Aircraft Flight Control DesignUsing Multivariable Proportional- Integral Control.IEEE Trans. Cont. Sys. Tech., 16 (1), 169–176, 2008.
[13] D. Noll, O. Prot, A. Rondepierre. A proximity controlalgorithm to minimize nonsmooth and nonconvexfunctions. Pacific J. Optim., 4(3),569–602, 2008.
[14] J.S. Shamma, M. Athans. Analysis of gain scheduledcontrol for nonlinear plants. IEEE Transactions onAutomatic Control, 35(4) 898 – 907, 1990.
[15] L. Sonneveldt. Nonlinear F-16 Model Descrip-tion. Faculty of Aerospace Engineering, DelftUniversity of Technology, The Netherlands, http ://www.mathworks.com/matlabcentral/fileexchange/11340− nonlinear− f − 16− fighter −model, 2006
[16] B. L.Stevens, F.L.Lewis. Aircraft Control and Simu-lation. John Wiley & Sons, Inc., 1992.
[MatlabR2010b] Robust toolbox. , MatlabR2010b.[MatlabR2010b] airframe demo of MatlabR2010b. http :
//www.mathworks.it/products/demos/shipping/robust/autopilotdemo.html?product = RC.