Fundamental Of MIcroelectronics Bahzad Razavi Chapter 6 Solution Manual
55
-
Upload
chachunasayan -
Category
Documents
-
view
17.103 -
download
96
description
Chapter 6 Solution Manual of Fundamentals of Microelectronics Bahzad Razavi Preview Edition.
Transcript of Fundamental Of MIcroelectronics Bahzad Razavi Chapter 6 Solution Manual




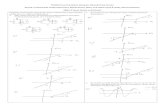
6.4 (a)
Q(x) = WCox (VGS − V (x) − VTH)
= WCox (VGS − VTH) − WCoxV (x)
Increasing VDS
L
WCox (VGS − VTH)
x
Q(x
)
The curve that intersects the axis at x = L (i.e., the curve for which the channel begins to pinchoff) corresponds to VDS = VGS − VTH .
(b)
RLocal(x) ∝1
µQ(x)
L x
RL
ocal(x
)
Increasing VDS

Note that RLocal diverges at x = L when VDS = VGS − VTH .













6.15
VGS
ID
VTH
Increasing VDS
Initially, when VGS is small, the transistor is in cutoff and no current flows. Once VGS increasesbeyond VTH , the curves start following the square-law characteristic as the transistor enters saturation.However, once VGS increases past VDS + VTH (i.e., when VDS < VGS − VTH), the transistor goes intotriode and the curves become linear. As we increase VDS , the transistor stays in saturation up to largervalues of VGS , as expected.


6.17
ID =1
2µnCox
W
L(VGS − VTH)α
, α < 2
gm ,∂ID
∂VGS
=α
2µnCox
W
L(VGS − VTH)
α−1
=αID
VGS − VTH




6.21 Since they’re being used as current sources, assume M1 and M2 are in saturation for this problem.To find the maximum allowable value of λ, we should evaluate λ when 0.99ID2 = ID1 and 1.01ID2 =ID1, i.e., at the limits of the allowable values for the currents. However, note that for any valid λ
(remember, λ should be non-negative), we know that ID2 > ID1 (since VDS2 > VDS1), so the casewhere 1.01ID2 = ID1 (which implies ID2 < ID1) will produce an invalid value for λ (you can check thisyourself). Thus, we need only consider the case when 0.99ID2 = ID1.
0.99ID2 = 0.991
2µnCox
W
L(VB − VTH)
2(1 + λVDS2)
= ID1
=1
2µnCox
W
L(VB − VTH)
2(1 + λVDS1)
0.99 (1 + λVDS2) = 1 + λVDS1
λ = 0.02 V−1






5.27
VDD − IDRD = VGS = VTH +
√
2ID
µnCoxWL
2ID
µnCoxWL
= (VDD − VTH − IDRD)2
ID =1
2µnCox
W
L
[
(VDD − VTH)2− 2IDRD (VDD − VTH) + I2
DR2
D
]
We can rearrange this to the standard quadratic form as follows:
(
1
2µnCox
W
LR2
D
)
I2
D −
(
µnCox
W
LRD (VDD − VTH) + 1
)
ID +1
2µnCox
W
L(VDD − VTH)
2= 0
Applying the quadratic formula, we have:
ID =
(
µnCoxWL
RD (VDD − VTH) + 1)
±
√
(
µnCoxWL
RD (VDD − VTH) + 1)2
− 4(
1
2µnCox
WL
RD (VDD − VTH))2
2(
1
2µnCox
WL
R2
D
)
=µnCox
WL
RD (VDD − VTH) + 1 ±
√
(
µnCoxWL
RD (VDD − VTH) + 1)2
−(
µnCoxWL
RD (VDD − VTH))2
µnCoxWL
R2
D
=µnCox
WL
RD (VDD − VTH) + 1 ±√
1 + 2µnCoxWL
RD (VDD − VTH)
µnCoxWL
R2
D
Note that mathematically, there are two possible solutions for ID. However, since M1 is diode-connected, we know it will either be in saturation or cutoff. Thus, we must reject the value of ID
that does not match these conditions (for example, a negative value of ID would not match cutoff orsaturation, so it would be rejected in favor of a positive value).






6.33 (a) Assume M1 is operating in saturation.
VGS = 1 V
VDS = VDD − IDRD = VDD −1
2µnCox
W
L(VGS − VTH)
2(1 + λVDS)RD
VDS = 1.35 V > VGS − VTH , which verifies our assumption
ID = 4.54 mA
gm = µnCox
W
L(VGS − VTH) = 13.333 mS
ro =1
λID
= 2.203 kΩ
+
vgs
−
gmvgs ro RD
(b) Since M1 is diode-connected, we know it is operating in saturation.
VGS = VDS = VDD − IDRD = VDD −1
2µnCox
W
L(VGS − VTH)
2(1 + λVGS)RD
VGS = VDS = 0.546 V
ID = 251 µA
gm = µnCox
W
L(VGS − VTH) = 3.251 mS
ro =1
λID
= 39.881 kΩ
+
vgs
−
gmvgs ro RD
(c) Since M1 is diode-connected, we know it is operating in saturation.
ID = 1 mA
gm =
√
2µnCox
W
LID = 6.667 mS
ro =1
λID
= 10 kΩ

+
vgs
−
gmvgs ro
(d) Since M1 is diode-connected, we know it is operating in saturation.
VGS = VDS
VDD − VGS = ID(2 kΩ) =1
2µnCox
W
L(VGS − VTH)2 (1 + λVGS) (2 kΩ)
VGS = VDS = 0.623 V
ID = 588 µA
gm = µnCox
W
L(VGS − VTH) = 4.961 mS
ro =1
λID
= 16.996 kΩ
+
vgs
−
gmvgs ro 2 kΩ
(e) Since M1 is diode-connected, we know it is operating in saturation.
ID = 0.5 mA
gm =
√
2µnCox
W
LID = 4.714 mS
ro =1
λID
= 20 kΩ
+
vgs
−
gmvgs ro





6.38 (a)
vin
+
vgs1
−
gm1vgs1 ro1
−
vgs2
+
gm2vgs2 ro2
vout
RD
(b)
vin
+
vgs1
−
gm1vgs1
gm2vgs2 ro2
−
vgs2
+
RD
vout
ro1
(c)
vin
+
vgs1
−
gm1vgs1 ro1
vout
RD
+
vgs2
−
gm2vgs2 ro2
(d)

vin
+
vgs1
−
gm1vgs1 ro1
+
vgs2
−
vout
gm2vgs2 ro2
(e)
+
vgs1
−
gm1vgs1
vin
gm2vgs2 ro2
−
vgs2
+
RD
vout
ro1






6.43 (a) Assume M1 is operating in triode (since |VGS | = 1.8 V is large).
|VGS | = 1.8 V
VDD − |VDS | = |ID| (500 Ω) =1
2µpCox
W
L
[
2 (|VGS | − |VTH |) |VDS | − |VDS |2
]
(500 Ω)
|VDS | = 0.418 V < |VGS | − |VTH | , which verifies our assumption
|ID| = 2.764 mA
(b) Since M1 is diode-connected, we know it is operating in saturation.
|VGS | = |VDS |
VDD − |VGS | = |ID|(1 kΩ) =1
2µpCox
W
L(|VGS | − |VTH |)
2(1 kΩ)
|VGS | = |VDS | = 0.952 V
|ID| = 848 µA
(c) Since M1 is diode-connected, we know it is operating in saturation.
|VGS | = |VDS |
|VGS | = VDD − |ID|(1 kΩ) = VDD − |ID|(1 kΩ) =1
2µpCox
W
L(|VGS | − |VTH |)
2(1 kΩ)
|VGS | = |VGS | = 0.952 V
|ID| = 848 µA

6.44 (a)
VX
IX
VDD − VTH VDD
Saturation Cutoff
M1 goes from saturation to cutoff when VX = VDD − VTH = 1.4 V.
(b)
VX
IX
1 + VTH VDD
Saturation Triode
M1 goes from saturation to triode when VX = 1 + VTH = 1.4 V.
(c)

VX
IX
VDD − VTH VDD
Saturation Cutoff
M1 goes from saturation to cutoff when VX = VDD − VTH = 1.4 V.
(d)
VX
IX
VTH VDD
Cutoff Saturation
M1 goes from cutoff to saturation when VX = VTH = 0.4 V.