Full Scale Ice Trials With MT Lunni
10
Kvaerner Masa-Azipod POLARTECH ‘96 Full-scale ice trials in ridges with the Azipod (Azimuthing Podded Drive) Tanker Lunni in the Bay of Bothnia in 1996 Torsten Heideman Pekka Salmi Kvaerner Masa-Yards Arctic Research & Development, Helsinki Kvaerner Masa-Azipod, Helsinki Arto Uuskallio Göran Wilkman Kvaerner Masa-Yards Arctic Research Centre, Helsinki Kvaerner Masa-Yards Arctic Research Centre, Helsinki Abstract MT Lunni was equipped with a new machinery and an Azipod propulsion unit in 1995. During the winter of 1993 the sister ship, MT Uikku (Azipod installed 1993), was tested in level ice and ridges mainly in ahead mode. During the last two years model tests and some full-scale observations have shown that a vessel with Azipod propulsion is capable of operating astern very well in heavy ice conditions. In order to thoroughly evaluate this capability, Kvaerner Masa-Yards and Nemarc Shipping Company (the owner of the vessel) decided to perform full-scale ice test in ridges running the vessel astern. This type of operation is generally possible only for powerful icebreakers. The tests were done in March 1996 during two sunny days in the northern Baltic outside the town of Kemi. The findings during the tests support earlier results and prove the superiority of the DAS (Double Acting Ship) concept for future projects. The paper describes the vessel, test conditions, main results and discusses future trends. 1. Background Icebreakers have traditionally and predominantly had their propellers driven by electric motors. At the end of the 1980’s Kvaerner Masa-Yards and ABB jointly developed and patented a radically new and revolutionary propulsion drive, the Azipod, (Azimuthing Podded Drive). It is a podded, electric propulsion unit, generally azimuthing the full 360” circle. The Azipod unit incorporates an electric AC motor, which directly drives a fixed-pitch propeller. The electric motor, located inside the pod, is controlled by a frequency converter, which allows full torque over the whole rotational speed range, typically from 0 to 300 rpm. Until now five Azipod units ranging from 500 to 11400 kW have been delivered, four units, 14000 kW each, are on order and units with a power over 20000 kW are on the drawing table. The Azipod concept combines the well-known advantages of electric propulsion with superb manoeuvrability, very low noise and vibration levels and savings in machinery space.
-
Upload
arto-uuskallio -
Category
Documents
-
view
196 -
download
1
Transcript of Full Scale Ice Trials With MT Lunni

Kvaerner Masa-Azipod POLARTECH ‘96
Full-scale ice trials in ridges with the Azipod (Azimuthing PoddedDrive) Tanker Lunni in the Bay of Bothnia in 1996
Torsten Heideman
Pekka Salmi
Kvaerner Masa-Yards Arctic Research & Development, Helsinki
Kvaerner Masa-Azipod, Helsinki
Arto Uuskallio
Göran Wilkman
Kvaerner Masa-Yards Arctic Research Centre, Helsinki
Kvaerner Masa-Yards Arctic Research Centre, Helsinki
Abstract
MT Lunni was equipped with a new machinery and an Azipod propulsion unit in 1995. During the winter of
1993 the sister ship, MT Uikku (Azipod installed 1993), was tested in level ice and ridges mainly in ahead mode.
During the last two years model tests and some full-scale observations have shown that a vessel with Azipod
propulsion is capable of operating astern very well in heavy ice conditions. In order to thoroughly evaluate this
capability, Kvaerner Masa-Yards and Nemarc Shipping Company (the owner of the vessel) decided to perform
full-scale ice test in ridges running the vessel astern. This type of operation is generally possible only for
powerful icebreakers. The tests were done in March 1996 during two sunny days in the northern Baltic outside
the town of Kemi. The findings during the tests support earlier results and prove the superiority of the DAS
(Double Acting Ship) concept for future projects. The paper describes the vessel, test conditions, main results
and discusses future trends.
1. Background
Icebreakers have traditionally and predominantly had their propellers driven by electric motors. At the end of the
1980’s Kvaerner Masa-Yards and ABB jointly developed and patented a radically new and revolutionary
propulsion drive, the Azipod, (Azimuthing Podded Drive). It is a podded, electric propulsion unit, generally
azimuthing the full 360” circle. The Azipod unit incorporates an electric AC motor, which directly drives a
fixed-pitch propeller. The electric motor, located inside the pod, is controlled by a frequency converter, which
allows full torque over the whole rotational speed range, typically from 0 to 300 rpm.
Until now five Azipod units ranging from 500 to 11400 kW have been delivered, four units, 14000 kW each, are
on order and units with a power over 20000 kW are on the drawing table. The Azipod concept combines the
well-known advantages of electric propulsion with superb manoeuvrability, very low noise and vibration levels
and savings in machinery space.

Kvaerner Masa-Azipod POLARTECH ‘96
The benefits of the Azipod concept apply to a great variety of ships. This is underlined by the fact that Azipod
units have found their ways into a buoy tender, a river icebreaker, Arctic tankers and large cruise vessels.
More than one hundred years ago the effectiveness of a bow propeller for ice navigation was detected. The water
flow from the propeller washes and lubricates the forebody of the ship behind the propeller. This decreases the
submersion component of the ice resistance. It also affects the breaking component of the ice by creating a
pressure drop in the water just in front of the propeller. This knowledge was refined and utilised by icebreaker
designers over the past decades. Baltic icebreakers typically have a power distribution possibility, fore/aft %, in
the range of 75/75 to 40/60. Comprehensive full-scale tests over the years with these Baltic icebreakers have
shown that the ice resistance decreases with increasing power to the bow propellers and ultimately the minimum
ice resistance level would be achieved when 100 % of the power is directed to the bow propellers. This is
actually the situation when an Arctic icebreaker with only aft propellers is running astern.
Bearing all this in mind it was expected that an Azipod ship would have a remarkably good performance when
running astern in ice. Full-scale tests in ice with the prototype Azipod, M/S Seili in 1991, MT Uikku in 1994 and
the river-icebreaker Röthelstein in 1995 encouraged these expectations and showed a potential to decrease the
ice resistance running astern by as much as 50 %. The full-scale tests described in this paper were aimed at
thoroughly exploring the full potential of running a big Azipod ship astern in extremely difficult ice conditions.
2. MT Lunni and Azipod
2.1 Ship description
Motor tanker Lunni is one of the Nemarc Shipping Company’s tankers. It was originally built in 1976 by Werft
Nobiskrug Gmbh, Rendsburg according to a project developed by the Wärtsilä Helsinki Shipyard. The vessel
was constructed to the highest Baltic ice class, 1A Super. It has ice navigation qualities well beyond those
required by the ice class and it is generally considered as one of the most potent Arctic merchant vessels in the
world. MT Lunni and her three sisterships have made frequent voyages to both the Canadian and the Russian
Arctic over the last two decades.
The propulsion system was converted in 1995 by Kvaerner Masa-Yards Inc., Helsinki New Shipyard. The
conversion was quite comprehensive since the old geared diesels and controllable pitch propeller system was
replaced by a diesel-electric system. In the conversion the old MaK main diesels, the shaft line with the
reduction gear and the rudder were replaced by an Azipod unit and diesel generators.
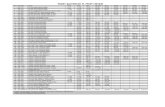
The main particulars of the converted MT Lunni are in Table 1. The side view of the general arrangement and a
sketch of the frame sections are presented in Figure 1 and Figure 2.

Kvaerner Masa-AziDod POLARTECH ‘96
Figure 1. MT Lunni, side view of the general arrangement.ISI5
BreadthDepthDraughtPowerPower plant
22.2 m12.0 m9.5 m
13.8 MW
Figure 2. Frame sections (sketch drawing).
2.2 Propulsion machinery.
The propulsion machinery is a diesel electric system with the power plant arrangement. There are four main
diesel engines and two auxiliary diesel engines. Each of them is coupled to generators. When the propulsion
system conversion was made, only one of the old diesel engines was left. All the new engines are made by
Wartsila Vasa Factory, see Table 2.
Table 2.MainMain diesel engines type power speed of rotation number -
[MW] [rpm]Wärtsiläa Vasa 12 V 32 4.9 750 2Wartsila Vasa 12V22 1.9 1000 1MaK 12 M 282 2.3 1000 1The system voltage is 6 kV and frequency is 50 Hz.
The power generated in the machinery is converted to mechanical energy at the propeller through the Azipod
propulsion unit. The unit incorporates an electric double winded AC motor, located inside the pod. The motor
drives directly a fixed pitch propeller, with a full torque availability to either direction. The speed range of the
AC motor is 0 to 160 rpm. The speed of rotation is controlled by a frequency converter (Cyclo converter). Shaft
seal is lip type with four lips. Figure 3 presents the Azipod unit installed.

Kvaerner Masa-Azipod POLARTECH ‘96
Ship related data were recorded with a computer and with an analogue tape recorder. The tape recorder was used
as a backup device. Ice surface elevation was measured from the ship during the test with a laser-video tech-
nique that can produce a 3D model of the measured surface. This technique is coarsely presented in Figure 4.
The 3D ice surface measurement technique is presented more accurately in Ref. [1] In addition to the 3D-
profiler the characteristics of the ice feature at Site 2 were defined through surveying and drilling before the test.
Figure 4 shows a schematic view of the measurements carried out during the tests.
Most of the measurements were made from the ship’s own instrumentation. Only the speed of the ship and ice
surface profile were measured with supplementary equipment. When the speed of the ship was very low (<0.5
m/s) a video signal was used in defining the speed.
Figure 3. The Azipod unit of MT Lunni.
Measurements
Table 3 Main particulars of the Azipod unit of MTLunni
Azipod type T21 /31Rpower, nominal 11.4 MWrpm at nominal 120-160 rpmpowerfrequency at nominal 12-16 Hzpowervoltage, nominal 2 x 1450 vPropeller diameter 5.65m
measurement
Figure 4: Measurements onboard the ship.

Kvaerner Masa-Azipod POLARTECH ‘96
4. Ice conditions
The tests were to be performed in as
heavy ridges as possible. Such conditions
are normally guaranteed in the northern
Baltic Sea in the Bay of Bothnia outside
the town of Kemi, see map in Figure 5.
The area in question is one of the most
ridged and is located close to the
shipping route into Kemi. The extent of
the ridge/rubble field is several miles.
The vessel was tested in two different
locations, both having similar type of ice
features. The water depth at the first siteFigure 5: Map of the test location area.
was 12-15 m. The second site was in deep water, > 20m. The ridges had a maximum sail height of 4 m and the
maximum drilled thickness was 15 m. The two sites were about 1.5 nautical miles apart. The measured center
profile of Site 2 is in Figure 6. Photographs in Figures 7-8 show the roughness of the area.
-6
-8/
0 snow
hardn void
-140 25 50 75 100 125 150 175 200 225 250 [m]
Figure 6. Measured center profile and the inner structure of the ridge at Site 2.

Kvaerner Masa-Azbod POLARTECH ‘96
Figure 7: General view of test Site 2 Figure 8: MT Lunni in the ridge field.
5.
5.1
Tests and Results
Ship performance in ice
5.1.1 Starting test
In front of the ridge field (Site 2) there was a level ice field, which was roughly 80 m long. The test started at the
edge of the level ice field. The ship started to creep in 80 cm thick ice, when the power was 2.1 MW and the
propeller rpm was 80. B y the time the vessel reached the ridge the speed had increased to 0.85 m/s, while the
power was gradually increased from 2 MW to 9 MW.
5.1.2 Ridge test
Maximum speed when entering the ridge was 0.85 m/s i.e. entrance speed was relatively low. The average
speed through the 150 m long ridge field was 0.2 m/s. The vessel was stopped four times in the ridge field by the
ice masses. During the stops the Azipod-unit was turned from side to side to enable the propeller flow to suck
ice blocks from the ridge and to wash the hull. The duration of the stops varied from a few seconds to a few
minutes. The maximum power used in the ridge was 11.4 MW.
In the ridge field the ship could reach a maximum speed of 0.5 m/s. At the point where the longest stop took
place the ridge mass was over 15 m thick and the sail height of the ridge was 3.2 m. Bit by bit the ridge was
devoured from below by the propeller and eventually the huge ridge sail literally vanished from sight in front of
everybody’s eyes. Figure 9 illustrates the penetration of the vessel into the ridge field.
In only one way the test was not a success: In order to find performance limits for the ship it was the intention to
find a ridge that the ship could not handle when running astern. Unfortunately a ridge, thick enough, could not
be found during the limited time frame available.

Kvaerner Masa-Azipod POLARTECH ‘96
Figure 9: Ridge profile and the speed of the ship in the ridge.
5.2 Propulsion machinery performance in ridges
In the ridge field the propeller and the Azipod unit had several impacts with ice. Despite of the severe ice loads
on the propeller the propulsion machinery was never overloaded. Due to the open propeller the propeller
efficiently breaks the ridge apart by physical contact between the propeller blades, and the ice and the Azipod
unit can easily be rotated even when completely surrounded by ice. Large propeller clearance ensures that large
ice blocks do not get jammed between the propeller and the hull.
Propulsion motor power remained high even during the most violent ice impacts and no excessive propulsion
motor heating was discovered. The longest ice loads lasted for over 20 seconds during which time the propeller
rpm dropped by 25 %. In these situations the propeller has continuous ice contact and the superior torque
characteristics of the electric propulsion machinery were fully utilised. Figure 10 shows an example of a typical
ice load situation.
900 14
800 12I I3700
10600 1
-2g I500 8aIg
I I6 400 I 6c
300 / + I
200I I4
I 12100
I0 0
0 2 4 6 8 10 12 14 16 18 20
Time [s]
0
Figure 10: An example of a moderate ice load on MT Lunni 1.5.3.1996.

Kvaerner Masa-Azipod POLARTECH ‘96
In general the results of the tests are encouraging and give valuable information for both designing and operating
a new generation of ice going ships.
6. Future
The quite astonishing performance of MT Lunni in severe ice conditions showed clearly that it is possible and
from a performance point of view even desirable to design an Azipod ship to run astern in any first-year ice
condition.
Traditionally all ships, and particularly conventional Arctic ships intended for independent operation, are a sum
of compromises. When a conventional Arctic ship is concerned, the designer always has to balance the bow
design between open water and ice operation requirements. If one chooses good icebreaking capability, the.offset will inevitably be poor open water resistance and bad seakeeping properties and vice versa. The emerging
of the Azipod concept suddenly changes all this and gives the designer a unique possibility to overcome this
dilemma. He can design the bow of the ship to be good in open water and the stern to break the ice. This concept
is called the Double Acting Ship or DAS-concept and it is patented by KMY.
An optimised DAS concept takes full advantage of the possibilities offered by propeller design. The thrust is
maximised by designing the pod and the propeller as efficiently as possible. According to model tests this is
achieved when the Azipod has a pulling propeller designed to rotate only in one direction. Consequently the
optimised DAS concept has a pulling Azipod when going ahead and when it goes astern, it turns the Azipod
180” to have a pulling propeller again. This lay-out was realised for the first time in the river icebreaker
Röthelstein
Figure II: Future vision of oil transportation in the arctic.
Right now western oil companies seem
to regain interest in Russian Arctic
offshore oil and gas. The Pechora Sea,
the Ob bay and the Yenisey river areas
are now very important as well as the
Sakhalin area in the Far-East. Several
exploration and transportation studies
are under way all over the world. We
are now confident that in all cases of
independent shipping of oil and gas in
the Arctic the DA-tanker, or DAT, is
the absolutely most cost efficient way to
do it. The future can be seen like the
view in Figure 11.
By independent shipping we mean that the ships operate without the support of icebreakers. Our present view is
that independent operation with a DAT concept is always feasible in areas where you do not have to fear multi-

Kvaerner Masa-Azipod POLARTECH ‘96
year ice. If operation is to take place in areas with multi-year ice the DAT concept has to be modified
accordingly. It does not seem feasible to design the Azipod to withstand collisions with multi-year ice features at
high speed running astern. Therefore the ship should be designed to operate bow first at high speed and stern
first only at low speed where the risk of damaging the Azipod can be handled.
Despite the demonstrated superb ridge demolition capability of the combination of the open propeller and the
torque characteristics of the electric propulsion machinery also the use of Azipods with ducted propellers has
been investigated.
The main advantages of ducts are higher thrust and lower ice forces in the blade breaking plane while the
disadvantage is the risk of clogging with a subsequent dramatic loss of thrust. The suspension struts of the duct
normally play an important role in the clogging mechanism of a normal duct. Blocks of ice are wedged between the duct, the struts and the propeller shaft where they disturb the water flow through the duct, causing bad
vibrations and loss of thrust.
Model tests in ice in our laboratory with ducted pulling Azipods, however, show that the risk of clogging to
some extent can be reduced. In light ice conditions the pulling propeller is able to suck the ice through the duct
without clogging due to the relatively large and unobstructed suction side of the duct. The suspension struts of
the duct are located behind the propeller plane and ice blocks smaller than the diameter of the propeller are quite
easily chewed by the propeller without clogging. In the process of chewing ice blocks the protective action of a
duct is, however, lost. The model tests indicated the same levels of the ice loads for the open and the ducted
propellers. It is still to be investigated what happens to the thrust of the ducted propeller when the circulation
around the profile of the duct is disturbed by the presence of pieces of ice. Figure 12 is a picture from the model
tests in level ice showing the open and ducted pulling Azipods from below.
Figure 12: A picture from the model tests in level ice showing an open and aducted pulling Azipods from below

Kvaerner Masa-Azipod POLARTECH ‘96
Conclusion
The two-day test session outside Kemi in the Gulf of Bothnia in March 1996 was a complete success. The results
fully confirmed the rather high expectations regarding the performance of an Azipod tanker running astern in
extremely difficult ice conditions. The washing effect of the propeller has a tremendous influence on the ice
resistance. The ship started to move astern in the about 80 cm thick level ice field in front of the ridge field at
Site 2 with a power of a little bit over 2 MW. Correspondingly, the power required for a starting test ahead in the
same ice conditions would be in the order of 4-5 MW. Taking into consideration that MT Lunni is not a pure
DAT concept in that respect that the Azipod does not turn 180” for backing it means that the difference in ice
resistance is even bigger because when running astern the propeller reverses at a lower propulsive efficiency.
The ridge performance is impressive, at least in the Baltic it does not seem to exist ridges or ridge fields big.
enough to actually stop the progress of the vessel. However, the way of operation is completely different when
compared to normal penetration by ramming. With a DAT concept the way to proceed is to enter the ridge field
at slow or moderate speed and just let the pulling propeller chew up the whole ridge and slowly pull the vessel
through. The progress might stop for a minute or two but turning the Azipod from side to side under full power
washes the hull and the vessel will start again. The speed remains slow all the time and the risk of damaging the
ship is manageable.
The power of the DAT mode is perhaps best described by an incident, that happened during the shallow water
tests at Site 1. Lunni went astern into the ridge field astern as far as the water depth permitted. When she tried to
get back bow first along the channel broken through the ridge field she was unable to do so. The ice masses in
the channel were pushed against the seabed by the bow whereby the bow rose and the ship was stopped. After
several attempts to get through bow first the vessel was stuck and needed deballasting in order to become free.
Finally we realised that the only way to get out was to turn the vessel 180” around in the ridge field and come
out stern first. The 180” turn took several hours but reversing back through the channel presented no problems.
Outside the actual ridge test program some turning tests astern were performed in 70-80 cm thick ice. The ratio
between the radius of the turning circle and the length of the ship was about 2 which means that Lunni in DAT
mode ranks among the icebreakers.
Tugs, offshore supply vessels and anchor handling tugs, which require high bollard pull can be equipped with
ducted pulling Azipods without an excessive risk of clogging in light ice conditions. In more severe ice
conditions the open propeller still seems more feasible than the ducted one mainly due to its ability to destroy
really big blocks of ice.
[1] ‘Airborne 3D-profilometer' by Haggrén et. Al, a Technical Research Centre of Finland (VTT) research notes
publication # 1667.