Frequency Assignment Problem
12
Frequency assignment problem in satellite communications using differential evolution Ayed A. Salman a, , Imtiaz Ahmad a , Mahamed G.H. Omran b , Mohammad Gh. Mohammad a a Computer Engineering Department, Kuwait University, Kuwait b Department of Computer Science, Gulf University for Science and Technology, Kuwait article info Available online 18 March 2010 Keywords: Combinatorial optimization Differential evolution Evolutionary computations Frequency assignment Problem NP-complete Satellite communication abstract Satellite communications technology has a tremendous impact in refining our world. The frequency assignment problem is of a fundamental importance when it comes to providing high-quality transmissions in satellite communication systems. The NP-complete frequency assignment problem in satellite communications involves the rearrangement of frequencies of one set of carriers while keeping the other set fixed in order to minimize the largest and total interference among carriers. In this paper, we present a number of algorithms, based on differential evolution, to solve the frequency assignment problem. We investigate several schemes ranging from adaptive differential evolution to hybrid algorithms in which heuristic is embedded within differential evolution. The effectiveness and robustness of our proposed algorithms is demonstrated through solving a set of benchmark problems and comparing the results with a number of previously proposed techniques that solve the same problem. Experimental results show that our proposed algorithms, in general, and hybrid ones in particular, outperform the existing algorithms both in terms of the quality of the solutions and computational time. Crown Copyright & 2010 Published by Elsevier Ltd. All rights reserved. 1. Introduction Multi-billion dollar satellite communication technology have refined our world by playing a key role in creating a global culture by spreading worldwide entertainment, stimulating technological interchange, and promoting trade around the world [1,2]. The explosive growth of essential applications resulted in an increase in the number of geostationary satellites thus multiple satellites may be circulating on the same orbit. When two or more satellites share the same orbit and use the same transmission frequency, they often experience what is known as cochannel interference which severely degrades both the quality and operation of the system. Therefore, the minimization of such interference has become a key design issue in satellite communications to provide high-quality transmission [3]. In order to minimize cochannel interference, the frequencies used by various satellites (in the system) must be re-arranged to find the optimal frequency assignment necessary to provide high quality transmissions. Frequency assignment problems (FAP) arise in many areas such as mobile telephony, wireless LANs, and radio/TV broadcasting. Application specific models and solutions have been developed for frequency assignment problems in different areas [4,5]. In this work, we target FAP in satellite communications systems where frequencies of one set of carriers are to be rearranged while keeping the other set fixed with the objective to minimize the largest and total interference among carriers. The frequency assignment problem is known to be an NP- complete problem [6], thus, a good exact algorithm for its optimal solution in polynomial time is unlikely to exist. Therefore, optimal solution strategies must be sacrificed in favor of fast heuristic techniques. Because of the intractable nature of the frequency assignment problem and its importance in providing high-quality transmission in satellite communication, it is highly desirable to explore avenues for developing good heuristic algorithms for the problem. A number of previous proposed solutions with varying degree of success have been proposed [6–13]. In [6,7], the authors proposed a systematic method for determining carrier frequency assignment to minimize cochannel interference by applying a branch-and-bound algorithm. The short- coming in their approach is that the branch-and-bound algorithm may fail when applied on large problem instances. Kurokawa et al. in [8] proposed an alternative approach based on neural network, however, their algorithm scales poorly and is rather expensive in terms of computational resources and time. A gradual neural network method, which gradually expands the activated neuron during the search process was later proposed in [9]. The method ARTICLE IN PRESS Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/caor Computers & Operations Research 0305-0548/$ - see front matter Crown Copyright & 2010 Published by Elsevier Ltd. All rights reserved. doi:10.1016/j.cor.2010.03.004 Corresponding author. Tel.: + 965 249 87412. E-mail addresses: [email protected] (A.A. Salman), [email protected] (I. Ahmad), [email protected] (M.G. Omran), [email protected] (M.G. Mohammad). Computers & Operations Research 37 (2010) 2152–2163
-
Upload
ana-maria-sima -
Category
Documents
-
view
69 -
download
0
Transcript of Frequency Assignment Problem

ARTICLE IN PRESS
Computers & Operations Research 37 (2010) 2152–2163
Contents lists available at ScienceDirect
Computers & Operations Research
0305-05
doi:10.1
� Corr
E-m
imtiaz@
moham
journal homepage: www.elsevier.com/locate/caor
Frequency assignment problem in satellite communications usingdifferential evolution
Ayed A. Salman a,�, Imtiaz Ahmad a, Mahamed G.H. Omran b, Mohammad Gh. Mohammad a
a Computer Engineering Department, Kuwait University, Kuwaitb Department of Computer Science, Gulf University for Science and Technology, Kuwait
a r t i c l e i n f o
Available online 18 March 2010
Keywords:
Combinatorial optimization
Differential evolution
Evolutionary computations
Frequency assignment Problem
NP-complete
Satellite communication
48/$ - see front matter Crown Copyright & 2
016/j.cor.2010.03.004
esponding author. Tel.: +965 249 87412.
ail addresses: [email protected] (A.A. S
eng.kuniv.edu.kw (I. Ahmad), Omran.m@gus
[email protected] (M.G. Mohammad).
a b s t r a c t
Satellite communications technology has a tremendous impact in refining our world. The frequency
assignment problem is of a fundamental importance when it comes to providing high-quality
transmissions in satellite communication systems. The NP-complete frequency assignment problem in
satellite communications involves the rearrangement of frequencies of one set of carriers while keeping
the other set fixed in order to minimize the largest and total interference among carriers. In this paper,
we present a number of algorithms, based on differential evolution, to solve the frequency assignment
problem. We investigate several schemes ranging from adaptive differential evolution to hybrid
algorithms in which heuristic is embedded within differential evolution. The effectiveness and
robustness of our proposed algorithms is demonstrated through solving a set of benchmark problems
and comparing the results with a number of previously proposed techniques that solve the same
problem. Experimental results show that our proposed algorithms, in general, and hybrid ones in
particular, outperform the existing algorithms both in terms of the quality of the solutions and
computational time.
Crown Copyright & 2010 Published by Elsevier Ltd. All rights reserved.
1. Introduction
Multi-billion dollar satellite communication technology haverefined our world by playing a key role in creating a global cultureby spreading worldwide entertainment, stimulating technologicalinterchange, and promoting trade around the world [1,2]. Theexplosive growth of essential applications resulted in an increasein the number of geostationary satellites thus multiple satellitesmay be circulating on the same orbit. When two or more satellitesshare the same orbit and use the same transmission frequency,they often experience what is known as cochannel interferencewhich severely degrades both the quality and operation of thesystem. Therefore, the minimization of such interference hasbecome a key design issue in satellite communications to providehigh-quality transmission [3]. In order to minimize cochannelinterference, the frequencies used by various satellites (in thesystem) must be re-arranged to find the optimal frequencyassignment necessary to provide high quality transmissions.Frequency assignment problems (FAP) arise in many areas suchas mobile telephony, wireless LANs, and radio/TV broadcasting.
010 Published by Elsevier Ltd. All
alman),
t.edu.kw (M.G. Omran),
Application specific models and solutions have been developedfor frequency assignment problems in different areas [4,5]. In thiswork, we target FAP in satellite communications systems wherefrequencies of one set of carriers are to be rearranged whilekeeping the other set fixed with the objective to minimize thelargest and total interference among carriers.
The frequency assignment problem is known to be an NP-complete problem [6], thus, a good exact algorithm for its optimalsolution in polynomial time is unlikely to exist. Therefore, optimalsolution strategies must be sacrificed in favor of fast heuristictechniques. Because of the intractable nature of the frequencyassignment problem and its importance in providing high-qualitytransmission in satellite communication, it is highly desirable toexplore avenues for developing good heuristic algorithms for theproblem. A number of previous proposed solutions with varyingdegree of success have been proposed [6–13].
In [6,7], the authors proposed a systematic method fordetermining carrier frequency assignment to minimize cochannelinterference by applying a branch-and-bound algorithm. The short-coming in their approach is that the branch-and-bound algorithmmay fail when applied on large problem instances. Kurokawa et al.in [8] proposed an alternative approach based on neural network,however, their algorithm scales poorly and is rather expensive interms of computational resources and time. A gradual neuralnetwork method, which gradually expands the activated neuronduring the search process was later proposed in [9]. The method
rights reserved.

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2153
in [9] finds better solutions by taking care of constraint satisfactionand the goal function optimization simultaneously.
Sanz et al. [10,11] presented hybrid methods that combinethe Hopfield neural network with simulated annealing [10]and genetic algorithm [11] to solve the frequency assignmentproblem. In their technique, fast digital Hopfield neural networkmanages the problem’s constraints and simulated annealingor genetic algorithm searches for better quality solutions.Wang et al. [12,13] presented a noisy chaotic neural networkwith variable threshold to solve the frequency assignmentproblem. In their approach, the optimization term was separatedfrom the constraint term in the cost function by assigning differentneurons with variable thresholds. This technique obtains bettersolutions compared with both techniques proposed in [9,10].
In this work, we propose new, fast, and scalable algorithmsbased on differential evolution (DE) to solve the frequencyassignment problem. Differential evolution is a relatively newevolutionary algorithm, proposed by Storn and Price [14], whichhas been successfully applied to solve a wide range of optimiza-tion problems [15–17]. DE is similar to others evolutionalgorithms where a population of individuals are used to searchfor an optimal solution [18]. The key difference is that mutation inDE algorithm is an arithmetic combination of individuals [18]whereas in traditional evolutionary algorithms, it is the result ofsmall perturbations to the genes of an individual. Moreover, in DE,the trial solutions are generated by adding weighted differencevectors to the target vector followed by a recombination(or crossover) step to produce an offspring which is only acceptedif it improves the fitness of the parent individual. DE is easy toimplement, requires little parameter tuning [19] and exhibits fastconvergence [20]. Nevertheless, due to its continuous nature,applying DE algorithm to solve combinatorial problems is stilllimited. In this work, we investigate the potential use of DE toprovide effective and efficient solution for FAP in satellitecommunications. The major obstacle in tailoring DE towards ourneeds is that DE is introduced as global optimizer over continuoussearch spaces while FAP in satellite communications is ofcombinatorial nature with discrete decision variables. Therefore,to apply DE on FAP we have either to find an appropriate mappingalgorithm to convert floating-point vectors to actual frequencyassignment solution, or to adapt basic DE operators to present theFAP solution. We propose several schemes to solve FAP problemusing DE such as adaptive differential evolution, standard DE withappropriate mapping, and hybrid algorithms (where a greedyheuristic is embedded within adaptive or standard differentialevolution) as it will be discussed later. A thorough analysis hasbeen performed to provide sufficient evidences that the proposed
ES 1 ES 2
System 1 System 2
Sat 1Sat 2
Fig. 1. Outline of cochannel interference.
algorithms are indeed very effective and efficient to solve for thefrequency assignment problem.
The rest of the paper is organized as follows. A briefintroduction to FAP in satellite communications is presented inSection 2. Section 3 provides an overview for DifferentialEvolution algorithm. Our proposed methods are presented inSection 4. Experimental results are reported and discussed inSection 5. Finally, in Section 6 we draw some conclusions.
2. Problem definition
Satellite communications technology has become of paramountimportance in global economy and culture [1,2]. In satellitecommunication systems, two or more satellites in the same orbitexperience cochannel interference when using the same frequencywhich severely degrades the quality of transmission in the system.Therefore, to provide high-quality transmissions, cochannel inter-ference minimization becomes an important design issue insatellite communications [3]. Frequency assignment problem insatellite communication systems is described as a typical exampleof constrained combinatorial optimization problem [9–13].
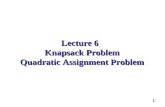
This paper follows the FAP formulation given in [7] which hasbeen applied in numerous algorithms such as [9–13]. Fig. 1illustrates intersystem cochannel interference between twoadjacent satellites when operating on the same frequency band.In such a system, each carrier can be described as a collection ofconsecutive unit segments in a frequency band [6], hence, theinterference between two M-segment systems can be describedby an M�M matrix (denoted as E) where each element, eij, standsfor the cochannel interference cost when segment ‘‘i’’ in system 2uses a common frequency with segment ‘‘j’’ in system 1(interference cost between segment ‘‘i’’ in system 2 andsegment ‘‘j’’ in system 1). Therefore, the FAP can be described asthe rearrangement of the frequencies assigned to system 2carriers to minimize the largest interference and at the sametime minimizing the sum of total interference (hence multi-objectives FAP [9]). For example, Fig. 3 shows the interferencematrix for the segmented frequency banks systems in Fig. 2 and apossible optimal reassignment of the frequencies as shown inFig. 4. Therefore, to solve FAP, the following three constraints(C1, C2, C3) must be fulfilled [9–13]:
C1
Sy
Sy
Every segment in system 2 must be assigned to a segment insystem 1.
C2
Every segment in system 1 can be assigned to at most onesegment in system 2.stem #2
C11 C12 C13
C24C23C22C21
Interference
stem #1
Frequency
FrequencyFa Fb
FbFa
Fig. 2. Cochannel interference model of the system in Fig. 1.

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–21632154
C3
All the segments of each carrier in system 2 must be assignedto consecutive segments in system 1 in the same order.Moreover, the objectives of FAP are to minimize the largestinterference and to minimize the sum of total interference, hence,in order to minimize the peak of interference between thesystems (largest interference), the first objective function can bedescribed as follows [10,11]:
F1 ¼maxðei,j � fi,jÞ 8i,j where i,j¼ 1, . . . ,M ð1Þ
where M and ei,j represent the number of segments and cochannelinterference cost between ‘‘i’’ and ‘‘j’’, respectively. Moreover, fi,j isa boolean function that returns 1 if segment ‘‘i’’ has been assignedto segment ‘‘j’’, and 0 otherwise. The second objective function ofFAP requires that the total interference of the systems to beminimum resulting in a second optimization function as follows:
F2 ¼XMi ¼ 1
XMj ¼ 1
eij � fij ð2Þ
3. Differential evolution
Differential evolution is an evolution algorithm proposed byStorn and Price [14] which is similar to other evolutionaryalgorithms where a population of individuals is used to search foran optimal solution [18]. The main difference between traditionalevolutionary algorithms and DE is that in traditional evolutionaryalgorithms, mutation results in small perturbations to the genes ofan individual while in DE the mutation is an arithmetic combinationof individuals [18]. At the beginning of the evolution process, the DE
C11 C12 C13
S11 S12 S13 S14 S15 S16
C21 S21 20 20 40 0 25 25
S22 50 10 30 0 55 *C22
S23 * 50 30 0 15 55
C23 S24 30 20 45 0 15 35
45 5 25 0 50 *S25C24
S26 * 45 25 0 10 50
Fig. 3. The interference matrix of the system in Fig. 2.
System #2
C12
C22C21Initial assignment
System #1
S21 S23
S12 S13S11
System #2 C24C23Optimum assignment S26S25S24
S22
C11
Fig. 4. Segmentation of the sy
mutation operator favors exploration, however, as evolutionprogresses, the mutation operator favors exploitation [21]. Hence,DE automatically adapts the mutation increments (i.e. search step)to the best value based on the stage of the evolutionary process andnot based on a predefined probability density function. DE has beensuccessfully applied to solve a wide range of optimization problemssuch as clustering [19], unsupervised image classification [22],digital filter design [23], and other non-linear function/processoptimization [24–27]. In short, DE is generally considered as areliable, accurate, robust, and fast optimization technique used inmany practical optimization problems.
Unlike other evolutionary algorithms, differential evolution (DE)does not use a probability distribution function to introducevariations into the population. Instead, DE uses the differencebetween randomly selected vectors (individuals) as the source ofvariation for a third vector referred to as the target vector. Trialsolutions are generated by adding a weighted difference vectors tothe target vector. This process is referred to as the mutation operatorwhere the target vector is mutated. A recombination, or crossoverstep is then applied to produce an offspring which is only accepted ifit improves the fitness of the parent individual. The basic DEalgorithm is described in more detail below with reference to thethree evolution operators: mutation, crossover, and selection:
Mutation: For each parent, xi(t) of generation t, a trial vector,vi,j(t), is created by mutating a target vector. Randomly select thetarget vector xi3 ðtÞ, with ia i3. Then, two individuals xi1 ðtÞ, andxi2 ðtÞ are randomly selected with i1a i2a i3a i and the differencevector xi1�xi2 is calculated. The trial vector is then calculated as
vi,jðtÞ ¼ xi3 ðtÞþFðxi1 ðtÞ�xi2 ðtÞÞ ð3Þ
where the term Fðxi1 ðtÞ�xi2 ðtÞÞAð0,1Þ represents the mutationstep size and F is a scaling factor used to control the amplificationof the differential variation.
Crossover: DE follows a discrete recombination approachwhere elements from the parent vector xi(t) are combined withelements from the trial vector, vi(t), to produce the offspring miðtÞ.Assuming a binomial crossover, the offspring can be describedusing the following equation:
mi,j ¼vi,jðtÞ if randð0,1ÞoCR or j¼ r
xi,jðtÞ otherwise
(ð4Þ
where j¼1,y,Nd where Nd is the number of genes (parameters) ofa single individual, rand(1,y,Nd), and CRA ½0,1� is the probabilityof reproduction. Thus, each offspring is a stochastic linearcombination of three randomly chosen individuals whenrandð0,1ÞoCR; otherwise the offspring inherits its parameters
C13
C24C23
Segment
SegmentS24 S25 S26
S16S14 S15
C22 C21S21S22 S23 Segment
stem defined in Figs. 1–3.

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2155
directly from the parent. Even when CR¼0, at least one of theparameters of the offspring will be different from the parent(forced by the condition j¼r).
Selection: DE implements selection procedure by forcingthe generated offspring, miðtÞ to replace the parent, xi(t), only ifthe fitness of the offspring is better than that of the parent.Algorithm 1 shows the pseudo-code for the DE:
Algorithm 1. Simple DE algorithm.
Initialize a population P;Evaluate P;repeat
for each individual in the population do
Let i1,i2, and i3 be three random integers in ½1,s�;
Let r¼ randð1,NdÞ;
for j¼ 1 to Nd do
if randð0,1ÞoCR or j¼ r then
vi,jðtÞ ¼ xi3 ,jþFðxi1 ,j�xi2 ,jÞ;���elsevi,jðtÞ ¼ xi,j;���end
�������������end
if f ðviÞo f ðxiÞ then
xi ¼ vi;��end
�������������������������������end
������������������������������������until the terminating condition is achieved;
Price and Storn [28] proposed ten different strategies for DEbased on the individual being perturbed, the number of indivi-duals used in the mutation process, and the type of crossover used.The strategy described above is known as ‘‘DE/rand/1’’ using thenotation ‘‘DE/x/y’’ where ‘‘x’’ represents the individual beingperturbed, and ‘‘y’’ gives the number of difference vectors usedto perturb ‘‘x’’ [27]. Therefore, ‘‘DE/rand/1’’ strategy means thatthe target vector is randomly selected and only one differencevector is used. This strategy is considered the most successful andwidely used one [27]. Other DE strategies include ‘‘DE/best/1’’,‘‘DE/best/2’’, ‘‘DE/rand/2’’ and ‘‘DE/randto-best/1’’. A detaileddiscussion of these and other strategies can be found in [29].
3 4 5 2 0 1
C21 C22 C23 C24
Fig. 5. Representation of DEPL’s solution.
4. Proposed approaches
One of the major challenges in tailoring DE to be applied to FAPin satellite communication problem is that DE is introduced as aglobal optimizer over continuous search space while FAP is of acombinatorial nature with discrete decision variables. Therefore,to apply DE on FAP we have either to find an appropriate mappingalgorithm to convert floating-point vectors to the actual fre-quency assignment solutions, or adapt basic operators of DE topresent the FAP solutions. In this paper we consider both of theseapproaches in addition to approaches in which heuristics areembedded within DE. The remainder of this section describes theproposed methods and how DE has been tailored to solve FAP by:(1) identifying the representation of population individuals,(2) describing the mechanism of generating initial population,(3) describing any modification to DE operators (e.g. mutation,crossover, selection) or embedded heuristic if applicable.
Before delving into the details, it is important to identify theobjective function that is used to measure the solution’seffectiveness. Since the objective function plays a key role in
directing the search toward optimal solution, then selecting aproper objective function is of paramount importance [29]. Ourobjective function (fitness function) is a weighted sum of both, theFAP’s constraints violation and the values of the optimizationfunctions (i.e. largest and total interference). The weight ofviolating any constraint is higher than that of the optimizationfunction to ensure producing feasible solutions. Therefore, wepropose the following fitness function:
FðTÞ ¼WH � ðC1þC2þC3ÞþW1� F1þW2� F2 ð5Þ
where WH is the weighting coefficient of constraints violation andWi represents the weighting coefficients for objective ‘‘i’’. More-over, Ci denotes constraint ‘‘i’’ of FAP whereas Fi is the objectivefunction (largest and total interference, respectively) as wasdescribed in Section 2.
4.1. DE with permutation linkage (DEPL)
In this algorithm we adapt DE by employing the idea of linkagecrossover [30,31] and discrete permutation [32]. In DEPL, eachindividual is represented by discrete numbers where a targetindividual is modified by permuting its values and then thelinkage crossover is utilized in an attempt to create a validsolution. A detailed description of the various steps used in DEPLalgorithm are given below:
Representation: Each individual represented by an array of sizeM where M is number of segments and is shown in Fig. 5. In thisfigure, the value of kth gene of i th individual specifies thesegment from system ‘‘1’’ which has been assigned to the kthsegment in system ‘‘2’’. This representation has the advantagethat it can always satisfy the first and the second constraints,hence C 1 and C 2 in Eq. (5) can always be set to zero while C 3must be checked for each solution. The solution will be consideredfeasible when C3 evaluates to zero.
Initialization: Each gene is initialized with a random segmentfrom system ‘‘1’’ such that there are no two genes assigned to thesame segment, hence, the initial population starts with indivi-duals which do not necessary satisfy constraint C3 but alwaysfulfill constraints C1 and C2.
Mutation: In this approach, the mutation operator is applied torearrange the starting positions (i.e. the first assigned segment) ofcarriers to investigate new solution as described in the Pseudo-code given in Algorithm 2.
Algorithm 2. A pseudo-code for mutation operator in DEPLmethod.
for each carrier doif randð0,1ÞoCR or j¼ r then
Let si ¼ current starting segment for the carrier;
Let sxasi is a randomly selected segment andsx can be used as newly
starting segment for the carrier;
Swap the places of si and sx;
����������end
���������������end
Crossover: In crossover operator, we employ the idea of linkagecrossover [30,31] with minor modifications. In our approach, thestrength of linkages between components of individual structure

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–21632156
(i.e. segments) are determined dynamically for each individualand are controlled by carriers’ lengths. For example; if carrier i
with length ci¼3 is assigned to segment 2 from system ‘‘1’’, thenaccording to this rule, there is a strong linkage between theconsecutive segments 2, 3 and 4 in system ‘‘1’’.
Selection: All proposed algorithms use the standard selectionoperator, thus in the selection phase, the generated offspring mi,replaces parent, xi only if its fitness is better than its parent.
The starting segment of each carrier in the offspring mi is eitherinherited from the mutated individual (vi) or inherited from theparent individual (xi). All remaining segments are re-arranged tobe consecutive with the current starting segment. Algorithm 3shows the pseudo-code to produce the offspring mi in DEPL.
Algorithm 3. A pseudo-code for crossover operator in DEPLmethod.
Set mi ¼ xi;
for each carrier do
Let ki ¼ starting segment for the carrier in mi;
Let kj ¼ starting segment for the carrier in vi;
if randð0,1ÞoCR then
Let ~kj is another segment in mi such that ~kj ¼ kj;
Swap the places of ~kj and ki in mi;
Swap all remaining segmentsfor the carrier to be consecutive
new starting segment ~kj ;
�����������elseif randð0,1ÞZCR and ki is a valid starting segment
for the carrier in mi then
Swap all remaining segmentswith new starting segment
with new starting segment kj;
������end
������������end
�������������������������������������end
4.2. Priority based DE (PDE)
In this method, we use the mapping technique to convert DE’sfloating-point values to FAP solutions. In this approach, eachcarrier is associated with a floating-point value that represents itspriority (see Fig. 6). By using this priority, the carriers are rankedsuch that the carrier with the highest value comes first, then thecarrier with second highest value, and so on. After that, andaccording to the carriers order, segments from system ‘‘1’’ areassigned to carriers in system ‘‘2’’ in a consecutive manner and inthe same order they appear in system ‘‘1’’. This method is simpleand always guarantee producing feasible solutions. Moreover,since each individual is represented by an array of size N (numberof carrier), this method saves computational resources since N isusually much smaller than M [9]. The details of the PDE approachand its operators are described below.
Representation: Each individual is represented by an array ofsize N (number of carriers) as shown in Fig. 6 where the value ofkth gene of i th individual specifies the priority associated withkth carrier in system ‘‘2’’.
0.5 0.25 0.75 1.0
C21 C22 C23 C24
Fig. 6. Representation for PDE’s carrier’s priorities.
Initialization: Each gene is initialized with a random valuebetween [0,1] representing the carrier’s priority.
Mutation and Crossover: PDE approach uses standard DEoperators as it was described in Section 3 and are used togenerate new priority values for each carrier.
Mapping to FAP solutions: By ranking the carriers according totheir priorities, the segments from system ‘‘1’’ are assigned in aconsecutive manner. For example, given the priority assignmentto each carrier as shown in Fig. 6 and given the same example ofFAP problem used earlier in Section 2, the carriers will bearranged as C24, C23, C21, C22. Since both C24 and C22 can carrytwo segments each, while C23 and C21 can carry one segment,then segments 1, 2 from system ‘‘1’’ will be assigned to C24,segment 3 from system ‘‘1’’ will be assigned to C23, segments 4from system ‘‘1’’ will be assigned to C21, and segment 5, 6 fromsystem ‘‘1’’ will be assigned to C22.
4.3. Permutation priority DE (PPDE)
In this approach, we use the same idea that is explained inSection 4.2 (i.e priority based DE), however, in this method wedeal with discrete permutations instead of floating point values.The following is the details of this approach:
Representation: Each individual represented by an array of sizeN (number of carriers) as shown in Fig. 7 where the value of kthgene of i th individual specifies a priority associated with kthcarrier in system ‘‘2’’.
Initialization: Each gene is initialized with a random integervalue between [1, N] specifying the carrier’s priority in such a waythat each carrier is assigned a different priority value.
Mutation: In order to investigate new solutions, themutation operator permutes priorities assigned to carriers. Theprocedure used to produce the mutated individual vi is given inAlgorithm 4.
Algorithm 4. A pseudo-code for mutation operator in PPDEmethod.
for each carrier doif randð0,1ÞoPr then
Let si ¼ current assigned priority for the carrier;
Let sx ¼ si is the priority foranother randomly selected carrier;
Swap the places of si and sx;
��������end
�������������end
Crossover: In PPDE, the crossover operator works probabilisti-cally rearranging the priorities of the carriers in the i th individual(Xi) according to their positions in the mutated individual (Vi).Algorithm 5 gives the pseudo-code responsible for producing theoffspring individual mi in PPDE algorithm.
Algorithm 5. A pseudo-code for crossover operator in PPDEmethod.
Set mi ¼ xi;
for each carrier then
Let ki ¼ current priority for the carrier if offspring mi;
Let kj ¼ current priority for the carrier in mutated vi;
if randð0,1ÞoCR then
Let ~kj is another priority in mi such that ~kj ¼ kj;
Swap the places of ~kj and ki in mi;
������end
����������������end

ARTICLE IN PRESS
S11 S12 S13 S14 S15 S15
C21 20 20 40 0 25 25
C22 100 40 30 15 110 *
C23 30 20 45 0 15 35
C24 90 30 25 10 100 *
Fig. 8. Total interference cost of each carrier using interference matrix in Fig. 3.
2 1 3 4
C21 C22 C23 C24
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2157
4.4. Heuristic-based DE
In this method, DE priority version as introduced in Section 4.2is used to rearrange the carriers, however, the segments fromsystem ‘‘1’’ are assigned to each carrier using one of the followingheuristics:
Fig. 7. Representation for PPDE’s solution.
S11 S12 S13 S14 S15 S15
1.
C21 20 20 40 0 25 25C22 50 30 30 15 55 *
First heuristic (DEH1): From the available consecutive segmentsin system ‘‘1’’ (i.e. not been assigned yet), select the ones whichproduce the lowest largest interference with current carrier insystem ‘‘2’’.
C23 30 20 45 0 15 35
2.C24 45 25 25 10 50 *
Second heuristic (DEH2): From the available consecutivesegments in system ‘‘1’’, select the ones which produce thelowest total interference with current carrier in system ‘‘2’’.
3.
Fig. 9. The largest cost interference of each carrier using the matrix interference inFig. 3.
Third heuristic (DEH3): From the available consecutive seg-ments in system ‘‘1’’, select the ones which produce both thelowest largest interference and the lowest total interferencewith current carrier in system ‘‘2’’ (i.e. this calculated by givinga weight for each objective (i.e. total, largest)).
For these heuristics, two new matrices can be generated fromthe main interference matrix (i.e. Fig. 3) namely, the totalinterference cost matrix, and the largest interference cost matrix.For example, using the interference matrix shown in Fig. 3, thetotal and largest interference matrices can be generated as givenin Figs. 8 and 9, respectively. Note that the consecutive segmentsaccording to the carrier’s length are also included in thiscalculation.
Due to carriers order and the heuristic method used whenassigning segments, some carriers may not find a free consecutivesegments equal to their length. This mean the populationindividuals of DEH1, DEH2 and DEH3 always satisfy constraintsC2 and C3 but not necessary satisfy C1. Thus the rule of DE is torearrange the carriers in a proper way to produce feasiblesolutions. Our Heuristic-based DE algorithms use the samerepresentation, initialization, mutation, and crossover operatorsas described in Section 4.2.
5. Experimental results
All proposed algorithms were implemented using MicrosoftVisual C++ and run on a 1.6 GHz Pentium 4 PC under Windowsenvironment. In the implementation, two types of parameterswere tuned, in particular, the control parameters of DE and theweighting coefficients in the objective function. For comparison, atotal of eight benchmarks were used and their specifications arelisted in Table 1. These are the same benchmarks that were usedin [12,13] where benchmarks 1–2, 3–5, and 6–8 were taken from[6,7,9,10], respectively.
5.1. Control parameters
As has been shown in Section 3, key control parameters in DEare: (1) population size s, (2) reproduction probability (CR), and(3) the scaling factor F [27]. It has been reported in literaturethat the performance of DE is sensitive to the choices ofthese parameters [14]. Fortunately, practical advices have been
suggested for selecting the proper values for these parameterssuch as setting s to 5 or 10 times the number of elementsin a vector (i.e. 5 or 10 �Nd), F in the range 0.4 to 1.0, and CR¼0.9or 1 [27].
In our implementation, the population size ‘‘s’’ was set to10 �Nd when Nd equal to the number of carrier N, and 5�Nd
otherwise. The reason for adapting such policy is that the numberof segments (i.e. M) is usually too large, thus, setting s to be 10times Nd will consume a large amount of CPU time and resources.On the other hand, the number of carriers (i.e. N) is normally verysmall, hence setting ‘‘s’’ to be 5 times Nd will retard theexploration progress. As for the parameters F and CR, we havefound that our algorithms performed better for F¼0.2 andCR¼0.9.
In addition to the three control parameters discussed pre-viously, we have three additional parameters that are needed totune the objective function. These parameters are: weightingcoefficient for constraints violation (WH), weighting coefficientfor first fitness objective (W1), and weighting coefficient for thesecond fitness objective (W2). Since the creation of feasiblefrequencies assignment is not guaranteed in the initial popula-tions or through evolutionary process, then the objective functionplays the role of discarding such solutions. Therefore, in order tostrongly discourage infeasible solutions, infeasibility should beconsiderably penalized within the objective function. In addition,depending on the necessities of the satellite system designer, thescaling factor for the first fitness objective (i.e. largest inter-ference) must be large to obtain solutions with low largestinterference, or it can be made smaller in order to obtain solutionswith low total interference. Thus, to direct the search towardminimum largest interference, W1 should be set to a large valuewhereas W2 must be set to a small value to ensure that the effectof largest interference is more than that of the effect of totalinterference. The values must be switched in case of minimizingtotal interference. The experimental evaluation for our proposedalgorithms was performed for two different objectives: one withthe aim of producing solution with minimum largest interferenceand another with the objective of producing solution withminimum total interference. In those experiments, the weighting

ARTICLE IN PRESS
Table 1Specifications of the FAP instances.
Instance # Carriers N # Segments M Range of carrier length Range of interference
BM1 4 6 1–2 5–55
BM2 4 6 1–2 1–9
BM3 10 32 1–8 1–10
BM4 10 32 1–8 1–100
BM5 10 32 1–8 1–1000
BM6 18 60 1–10 1–100
BM7 30 100 1–10 1–100
BM8 15 50 1–8 1–1000
Table 2Comparison of the results obtained by proposed methods (best/average/standard deviation).
Benchmarks DEH1 DEH2 DEH3 DEPL PDE PPDE
BM1 Largest 30/30/0 30/30/0 30/30/0 30/30.0/0.0 30/30.0/0.0 30/30/0
Total 100/101/0.7 100/100/0 100/100/0 100/100.00/0.00 100/103.6/2.24 100/100/0
BM2 Largest 4/4/0 4/4/0 4/4/0 4/4/0.00 4/4/0.00 4/4/0
Total 13/13/0.0 13/13.04/0.28 13/13/0.0 13/13/0.00 13/14.40/1.10 13/13/0
BM3 Largest 7/7/0 7/7/0 7/7/0 7/7.50/0.50 7/7/0.00 7/7/0
Total 85/85.12/0.59 86/86/0 85/85/0 85/97.02/6.95 91/115/9.33 86/89.8/2.94
BM4 Largest 64/64/0 73/77.34/3.4 64/64/0 64/73.22/6.54 64/65.50/1.95 64/65.84/1.92
Total 880/881.04/7.28 961/897.2/55.24 880/880/0 935/952.1/63.03 888/1024.4/79.63 889/995.8/69.75
BM5 Largest 640/640.42/2.94 674/674/0 640/640/0 640/686.88/51.17 640/649.58/14.38 640/667.22/17.30
Total 8693/8701.96/57.41 7243/7267.3/82.47 8693/8697.6/8.11 8693/9055.6/1095.9 8835/10338.9/992.3 8835/9029.9/1198.9
BM6 Largest 33/33.68/1.29 33/35.76/3.08 32/32.04/0.2 34/40.84/3.11 36/39.52/1.36 35/39.66/1.23
Total 1011/1026.7/24.89 1013/1009.98/18.65 981/1067.54/43.69 1176/1131.34/57.32 1130/1321.62/96.83 1102/1216.5/91.43
BM7 Largest 61/64.4/6.27 66/73.98/1.50 61/69.2/8.35 96/98.50/1.34 81/86.94/1.42 85/87.78/1.27
Total 2811/2971.78/139.3 2565/2468.8/43.7 2931/3230.1/181.2 4636/4952.3/220.12 4400/4498.4/275.1 4358/4469.9/258.96
BM8 Largest 620/625.24/14.78 620/725.42/24.88 620/620.28/1.37 627/750.84/50.58 620/695.62/30.51 661/703.4/31.4
Total 12 653/12 919.2/784 12 653/12 795.8/853.6 12 653/12 849.4/508.2 14 735/15 680.8/1305.9 12 653/17 119.7/1701.7 16 064/17 192/1549.1
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–21632158
coefficient for problem’s constraints was set to 1 �106 while theweighting coefficients W 1 and W 2 were set to 50.0 and 0.01,respectively, when the objective was to obtain solution with lowlargest interference. In the case when the objective was to obtainlow total interference solution, W1 and W2 were set to 0.5 and5.0, respectively.
5.2. Experimental set 1
The initial population was generated for each algorithm as hasbeen indicated in Section 3. We run each of our algorithms 50times for each instance with maximum number of generations setto 1500. Table 2 reports a representative set of results whenapplying the different proposed methods on benchmarks BM1–BM8. The rows of the tables specifies the methods used whereasthe columns give the best/average/standard deviation values ofthe largest and total interference for each of the benchmarks (thebest total interference is recorded when the best largestinterference is found).
From the table, it can be seen that all proposed algorithmsreached the same best value in term of largest interference inBM1–BM5 (except for DEH2 in BM4 and BM5). For BM6, the bestsolution for both, the largest and total interference (which were32 and 981) was achieved by DEH3. For BM7 benchmark, Table 2shows that the best largest interference was 61 and it is achievedby methods DEH1 and DEH3. As for BM8, all proposed algorithms(except DEPL and PPDE) obtained the same solution, 620 forlargest interference and 12 653 for total interference. The bestsolution found by DEPL is very close to best solution found byother algorithms (i.e. DEPL reached to 627), however, the bestlargest interference for DEPL is significantly worst.
Fig. 10 shows the average number of generations needed byeach of proposed algorithms to reach its best largest interference
for benchmarks BM4 and BM5 using 50 runs. In the figure, thevertical axis represents the function value and the horizontal axisrepresents the number of generations needed. It can be seen fromthe figure that the fastest time to converge is achieved by DEH1and DEH3 whereas DEPL requires larger time to converge whencompared to other algorithms.
5.2.1. Comparison with other techniques
In this section we compare our approaches with other existingtechniques. In our comparison, we will base our comparison onfour performance metrics, namely, best largest interference, besttotal interference with their corresponding average/standarddeviation, the convergence rate (i.e. the ratio at which thealgorithm finds a feasible solution), and the average computa-tional time (measured in seconds) needed to reach the bestsolution.
Table 3 shows results obtained by GNN [9], HopSA [10], andNCNN-VT [13] as reported in [13]. Table 3 shows both the bestand the average calculated values of both the largest and totalinterference for GNN algorithm, best value of both the largest andtotal interference (not including average), and both the best andthe average calculated values of both the largest and totalinterference (average over 1000 runs) for NCNN-VT algorithm.Table 4 compares our proposed algorithms to HopSA [10] andNCNN-VT [13] algorithms in term of the average computationaltime needed to reached the best solution. Take into considerationthat, the simulation for GNN [9], HopSA [10], and NCNN-VT [13],was conducted on a 16-node dual Xeon 3.06-GHz (Intel IA32)Linux cluster with a parallel C/C++ compiler and a toolkit NPACIROCKS v3.0 [13].
As shown in Tables 2–4, we can conclude that all algorithmsreached the same best largest interference for BM1–BM5 (except forDEH2 in BM4 and BM5), with convergence rate of 100%. However,

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2159
they are all competitive in terms of the averaged recorded best largestinterference, computational time, and the best and averaged totalinterference. In BM1–BM5 we can see that generally DEH1 and DEH3outperformed all other algorithms with averages very close to optimalsolutions and with the lowest computational time among all.However, none of our proposed algorithms reached the best totalinterference achieved by NCNN-VT in BM5, except for DEH2 whichachieved better total interference but with higher largest interference.BM6 and BM8 demonstrate clearly the effectiveness and robustnessof our proposed algorithms, by achieving better solutions in terms ofbest largest interference and total interference with very lowcomputational time (except for DEPL). New best solutions found by
Fig. 10. Comparison between the best largest interference (averages) found by
each proposed method for BM4 and BM6.
Table 3Performance of GNN [9], HopSA [10] and NCNN-VT [13] methods on eight instances (f
Instance GNN [9] HopSA [1
Largest Best/Ave Total Best/ave Largest
BM1 30/31.5 100/100.8 30
BM2 4/4.9 13/15.4 4
BM3 7/8.1 85/99.4 7
BM4 64/77.1 880/982.0 64
BM5 640/766.8 8693/9413.9 817
BM6 49 1218 45
BM7 100 4633 98
BM8 919 16 192 741
DEH3 algorithm for BM6 and BM8 are shown in Figs. 11 and 12,respectively, where a black square stands for assigning the carrier tothe corresponding segment, while the white square stands for noassignment. For BM7; DEH1 and DEH3 achieved the same best largestinterference as reported by NCNN-VT. Even thought NCNN-VTobtained same instances which has better total interference, onaverage, DEH1 and DEH3 outperform it with much lesscomputational time. It is clear that all our proposed algorithms inthis paper reached better or at least the same performance obtainedby HopSA and GNN.
5.2.2. Pair-wise and Global comparison
Fig. 13 shows a pair-wise and a global comparison among allalgorithms summarized from Tables 2 and 3. The comparison hasbeen performed by observing the number of times the average ofbest largest interference for each algorithm was better, worse orthe same compared to the average of every other algorithm for all 8benchmarks. Each box in Fig. 13 compares the algorithm in the leftside to the algorithm on the top, where ‘‘4 ’’ , ‘‘o ’’ and ‘‘¼ ’’ signsindicate the number of times the average of the algorithm on theleft was better, worse or the same, respectively, compared to thealgorithms listed on the top. For example, the average of DEH1algorithm was better than the average of DEH2 in five benchmarks,same in three benchmarks and worse in zero benchmarks. For theglobal comparison, an extra box labeled (‘‘All’’) is used. Thenumbers in this box indicate the performance of each algorithmin left side comparing to all other algorithms combined. So basedon results shown in box ‘‘All’’, we can rank the algorithms in anincreasing order of best solutions obtained as: DEH3, DEH1, PDE,DEH2 and PPDE, NCNN-VT, HopSA, DEPL, and GNN.
5.2.3. Detailed comparison between the best techniques
In this sub-section we provide a detailed comparison betweenDEH1, DEH3 and NCNN-VT methods. Table 5 summarizes resultsfor these three algorithms, where results for NCNN-VT are takenfrom [13]. The table includes the best largest interference, thepercentage of reaching optimum (Opt rate), and the averagedeviation from the optimum.
In Table 5, DEH1 achieved at least a 44% opt rate, DEH3achieved at least a 16% opt rate, while NCNN-VT achieved at leasta 10.4% opt rate. Looking at the average error, we can find that theproposed algorithms (i.e. DEH1 and DEH3) achieved an averageerror much smaller than NCNN-VT. This become more significantin BM8, where the average error of NCNN-VT reached to 182,while the worst average error in our algorithms was not morethan 5.24. Note that NCNN-VT failed to reach to the best solutionfound by DEH1 and DEH3 in BM8 (and BM6).
In short, Tables 2–5 demonstrate that the proposed algorithmspresented in this paper are very reliable by achieving bettersolutions (i.e. minimum largest interference) for all benchmarks
rom [13]).
0] NCNN-VT [13]
Total Largest Best/Ave/SD Total Best/ave/SD
100 30/30/0 100/100/0
13 4/4/0 13/13.7/1.2
85 7/7/0 85/89.9/3.8
888 64/65.7/2.6 880/903.6/35.1
6910 640/677/71.1 7246/8445/656.7
1080 35/39.8/4.8 1000/1068/40.5
3396 61/79.9/7.8 2779/2995/124
13 178 695/877/64.8 15 373/18 034/318

ARTICLE IN PRESS
Table 4Computational time (measured in seconds) comparison between all methods.
Method Time (s)
BM1 BM2 BM3 BM4 BM5 BM6 BM7 BM8
Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD)
DEH1 0.00 (0.00) 0.00 (0.00) 0.16 (0.15) 0.09 (0.05) 0.26 (0.26) 3.71 (1.56) 58.40 (25.63) 1.26 (0.84)
DEH2 0.00 (0.00) 0.00 (0.00) 0.03 (0.02) 0.11 (0.08) 0.06 (0.15) 4.22 (1.73) 43.18 (13.91) 1.69 (1.17)
DEH3 0.00 (0.00) 0.00 (0.00) 0.28 (0.25) 0.17 (0.10) 0.64 (0.56) 12.03 (4.89) 69.64 (44.41) 4.62 (2.08)
DEPL 2 (1.73) 2.38 (2.05) 222.8 (118.94) 224.98 (132.93) 237.3 (113.99) 1076.76 (204.42) 809.17 (264.84) 759.24 (231.15)
PDE 0.00 (0.00) 0.00 (0.00) 0.18 (0.12) 0.62 (0.39) 0.71 (0.49) 5.75 (3.39) 18.42 (12.61) 3.40 (2.04)
PPDE 0.00 (0.00) 0.00 (0.00) 1.36 (0.83) 1.48 (0.69) 1.84 (1.24) 15.55 (8.08) 25.58 (16.75) 7.68 (2.10)
GNN [9] Not available
HopSA [10] 1.0 (0.0) 1.0 (0.0) 33.0 (0.0) 33.8 (0.8) 33.0 (0.5) 1529 (156) 2845 (528) 3738 (615)
NCNN-VT [13] 0.02 (0.0) 0.02 (0.0) 0.31 (0.04) 0.36 (0.05) 0.37 (0.04) 11.8 (0.6) 78.3 (13.3) 143.2 (12.5)
Segments
Carrier1 60
1
18
Fig. 11. Best solution obtained by DEH3 for instance BM 6, with largest interference¼32, total interference¼981.
Segments
Carrier 1 50
1
15
Fig. 12. Best solution obtained by DEH3 for instance BM 8, with largest interference¼620, total interference¼12 653.
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–21632160
tested, excellent rate of reaching the optimum solutions, as wellas, they are very fast (excluding DEPL) compared to other.
5.3. Experimental set 2
The second set of experiments has been conducted with theaim to produce solutions with minimum total interference.Therefore, W 1 was set to 0.5 and W 2 was set to 5.0. The initial
population was generated for each algorithm as has beendescribed in Section 4. Each proposed algorithm was run 30times for each problem instance with maximum number ofgenerations set to 1500. Since almost all literature investigationconcentrates on achieving minimum largest interference notminimum total interference, hence no literature results does exitfor comparison.
Tables 6 and 7 list the results of the conducted experiments.Table 6 lists a representative set of results (best/average/standard

ARTICLE IN PRESS
DEH2 DEH3 DEPL PDE PP DE GNN HopSA NCNN-VT ALL
DEH 1
DEH2
DEH3
DEPL
PP DE
PDE
GNN
NCNN-VT
HopSA
>5=3<0
>1=4<3
>0=3<5
>6=2<0
>5=2<1
>6=2<0
>5=3<0
>2=3<3
>5=3<0
>0=2<6
>5=3<0
>2=3<3
>5=3<0
>0=2<6
>5=3<0
>8=0<0
>7=0<1
>8=0<0
>8=0<0
>8=0<0
>8=0<0
>4=4<0
>4=3<1
>4=4<0
>2=2<4
>4=3<1
>1=0<7
>4=3<1
>5=3<0
>4=3<1
>5=3<0
>1=2<5
>4=3<1
>2=3<3
>0=0<8
>3=3<2
>39=22<3
>24=20<20
>41=22<1
>12=14<38
>30=20<14
>20=20<24
>16=22<26
>2=0<62
>24=20<20
Fig. 13. A Global comparison of FAP algorithms averaging over 50 runs: ‘‘4 ’’ , ‘‘¼ ’’, ‘‘o ’’ refers to better, same, worse than in n times.
Table 5Comparison between NCNN-VT [13] and DEH1, DEH3.
Instance NCNN-VT DEH1 DEH3
Largest interference Total
interference
Largest interference Total
interference
Largest interference Total
interference
Best Opt rate
(%)
Average
error
Best Opt rate
(%)
Average
error
Best Opt rate
(%)
Average
error
BM1 30 100 0 100 30 100 0 100 30 100 0 100
BM2 4 100 0 13 4 100 0 13 4 100 0 13
BM3 7 100 0 85 7 100 0 85 7 100 0 85
BM4 64 88.3 1.74 880 64 100 0 880 64 100 0 880
BM5 640 37.1 37.3 7246 640 98 0.42 8693 640 100 0 8693
BM6 35 25.8 4.78 1000 33 58 0.68 1011 32 96 0.04 981
BM7 61 10.4 18.1 2779 61 44 3.4 2811 61 16 4.2 2931
BM8 695 26.6 182 15 373 620 84 5.24 12 653 620 96 0.28 12 653
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2161
deviation for minimum largest and total interference) when theproposed algorithms were applied to benchmarks BM1–BM8 andTable 7 compares the proposed algorithms in terms of theiraverage computational time.
rom Tables 6 and 7, it can be seen that all proposed algorithmsreached the same lowest total interference for BM1 and BM2.However, for BM4–BM8, DEH1 algorithm which was able to findthe best solutions in first set of experiments, failed to find the bestsolution in this experiment . This due to the fact that the heuristicembedded within DEH1 always looks for the minimum largestinterference regardless of the total interference. Moreover, DEH2
algorithm obtained the best total interference in all benchmarks(except in BM3) with the shortest time and with an excellent rateof achieving the optimum solution. Further, DEH3 was able toachieve comparable results in this experiment as in the previousexperiment (when minimum largest interference was the mainobjective) demonstrating its effectiveness in either case. DEPL,PDE and PPDE algorithms found the optimal total interference inBM1–BM5, however, their performance differs for BM6–BM8. Thelongest computational time recorded for all benchmarks waswhen running DEPL algorithm which we believe is caused by therepresentation used in the algorithm (i.e. Nd¼M).

ARTICLE IN PRESS
Table 6Comparison between proposed methods for experiment set 2 (best/average/standard deviation).
Benchmarks DEH1 DEH2 DEH3 DEPL PDE PPDE
BM1 Total 100/100/0 100/100.17/0.90 100/100/0 100/100/0 100/100.00/0.00 100/100/0
Largest 30/30/0 30/30/0 30/300/0 30/30/0 30/30.00/0.00 30/30/0
BM2 Total 13/13/0 13/13/0 13/13/0 13/13/0 13/13.00/0.00 13/13/0
Largest 4/4/0 4/4/0 4/4/0 4/4/0 4/4.00/0.00 4/4/0
BM3 Total 85/85.67/1.37 86/86/0 85/85/0 85/92.87/4.90 86/89.27/2.14 86/87.4/2.30
Largest 7/7/0 7/7/0 7/7/0 7/7.90/0.75 7/7.47/0.76 7/7.13/0.43
BM4 Total 866/874.27/8.06 821/822.10/5.92 821/821/0 821/891.57/29.26 821/863.27/16.68 821/853.33/22.12
Largest 67/67.3/5.42 99/98.37/3.41 99/99/0 99/90.20/8.17 99/85.30/10.27 99/88.37/9.84
BM5 Total 7205/7234.133/77.61 6910/6913.57/19.21 6910/6910/0 6910/7413.93/397.89 6910/7029.43/109.62 6910/6962.6/68.39
Largest 725/725/0 817/817/0 817/817/0 817/848.83/102.16 817/817.00/0.00 817/817/0
BM6 Total 968/977.47/12.03 923/946.13/16.11 923/937.03/13.15 962/1043.93/44.19 974/1022.17/24.68 933/971.53/20.12
Largest 49/45.67/3.33 46/45.37/2.76 46/45.57/1.17 45/46.93/2.13 48/47.13/1.80 45/46.53/2.69
BM7 Total 2559/2700.3/130.5 2409/2447.4/16.1 2501/2628.03/103.8 4513/4838.6/166.96 2779/3430.2/328.3 3185/3418.4/114.98
Largest 81/81.9/6.81 80/83.13/7.48 74/87.57/7.06 100/99.39/1.01 81/95.40/5.52 95/96.33/3.46
BM8 Total 11 800/12 203.5/391.7 11 182/11 365.5/275.2 11 182/11 390.3/120.9 12 143/13 555.8/733.1 11 294/12 348.7/647.3 11 294/11 913.5/442.5
Largest 727/758.5/86.92 938/877.97/96.80 938/844.33/92.80 727/923.2/60.31 938/845.30/95.55 938/865.07/101.09
Table 7Computational time comparison.
Method Time (s)
BM1 BM2 BM3 BM4 BM5 BM6 BM7 BM8
Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD) Mean (SD)
DEH1 0.00(0.00) 0.00(0.00) 0.37(0.45) 0.20(0.28) 0.24(0.31) 3.7(1.57) 49.75(22.73) 1.51(1.03)
DEH2 0.00(0.00) 0.00(0.00) 0.04(0.02) 0.11(0.06) 0.05(0.02) 3.69(1.26) 35.47(10.48) 1.27(1.08)
DEH3 0.00(0.00) 0.00(0.00) 0.76(0.36) 0.85(0.57) 0.71(0.38) 13.98(4.08) 44.81(20.31) 4.26(2.12)
DEPL 0.00(0.00) 0.00(0.00) 2.24(1.36) 2.00(0.98) 1.99(0.84) 45.06(10.57) 154.04(45.49) 17.85(7.04)
PDE 0.00(0.00) 0.00(0.00) 0.61(0.38) 0.59(0.38) 0.36(0.23) 5.93(2.00) 43.43(32.59) 1.55(0.45)
PPDE 0.00(0.00) 0.00(0.00) 0.76(0.36) 0.85(0.57) 0.71(0.38) 13.98(4.08) 44.81(20.31) 4.26(2.12)
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–21632162
6. Conclusions
In this paper, we have presented a number of novel approachesto solve the frequency assignment problem in satellite commu-nication systems. All proposed algorithms in this work areinspired by Differential Evolution algorithm. Several schemessuch as: adaptive differential evolution which represents FAPsolutions directly, standard DE with appropriate mapping algo-rithm to present FAP solutions, and hybrid algorithms in whichheuristics are embedded within adaptive or standard differentialevolution have been investigated. The effectiveness and robust-ness of our proposed algorithms are demonstrated throughsolving a set of benchmark problems and comparing resultsobtained with other existing methods. Experimental results haveshown that our proposed algorithms in general and hybrid ones inparticular are robust and were able to find comparable and evenbetter solutions (i.e. for some benchmarks) with low computa-tional time. Therefore, algorithms based on differential evolutionparadigm provide a viable approach for solving frequencyassignment problem in satellite communication systems.
Acknowledgments
The authors would like to thank Prof. L. Wang and his team, atthe School of Electrical Engineering, Nanyang TechnologicalUniversity, Singapore, for providing us the benchmarks.
References
[1] Pelton JN, Oslund RJ, Marshall P. Communications satellites: global changeagents. Mahwah, NJ: Lawrence Erlbaum; 2004.
[2] Whalen DJ. Communications satellites: making the global village possible,2008 /http://www.hq.nasa.gov/office/pao/History/satcomhistory.htmlS.
[3] Jeruchim M. A survey of interference problems and applications togeostationary satellite networks. In: Proceedings of the IEEE, vol. 65, 1977.p. 317–31.
[4] Murphy RA, Pardalos PM, Resende MGC. Frequency assignment problems.Kluwer, MA: Norwell; 1999.
[5] Aardal KI, van Hoesel SPM, Koster AMCA, Mannino C, Sassano A. Models andsolution techniques for frequency assignment problems. Annals of OperationsResearch 2007;153(1):79–129.
[6] Mizuike T, Ito Y. Optimum frequency assignment for reduction of cochannelinterference. Transactions on IEICE 1986;J69-B(9):921–32.
[7] Mizuike T, Ito Y. Optimization of frequency assignment. IEEE Transactions onCommunications 1989;37(10):1031–41.
[8] Kurokawa T, Kozuka S. A proposal of neural network for the optimum frequencyassignment problem. Transactions on IEICE Journal 1993;76-B-II(10):811–9.
[9] Funabiki N, Nishikawa S. A gradual neural-network approach for frequencyassignment in satellite communication systems. IEEE Transactions on NeuralNetworks 1997;8(6):1359–70.
[10] Sanz SS, Mozos RS, Calzon CB. A hybrid Hopfield network-simulatedannealing approach for frequency assignment problem in satellite commu-nications systems. IEEE Transactions on Systems, Man, and Cybernetics—PartB: Cybernetics 2004;34(2):1108–16.
[11] Sanz SS, Calzon CB. A hybrid neural-genetic algorithm for the frequencyassignment problem in satellite communications. Applied Intelligence2005;3(22):207–17.
[12] Liu W, Shi H, Wang L. Minimizing interference in satellite communicationsusing chaotic neural networks. In: IEEE third international conference onnatural computation (ICNC 2007), 2007. p. 441–4.
[13] Wang L, Liu W, Shi H. Noisy chaotic neural networks with variable thresholdsfor the frequency assignment problem in satellite communications. IEEETransactions on Systems, Man, and Cybernetics—Part C: Applications andReviews 2008;38(2):209–17.
[14] Storn R, Price K. Differential evolution—a simple and efficient adaptivescheme for global optimization over continuous spaces. Technical report TR95-012, International Computer Science Institute, Berkeley, CA; 1995.
[15] Storn RM, Price KV. Differential evolution—a simple and efficient heuristic forglobal optimization over continuous spaces. Journal of Global Optimization1997;11(4):341–59.
[16] Rae A, Parameswaran S. Synthesizing application-specific heterogeneousmultiprocessor using differential evolution. IEICE Transactions on Funda-mentals E 2001;84-A(12):3125–31.

ARTICLE IN PRESS
A.A. Salman et al. / Computers & Operations Research 37 (2010) 2152–2163 2163
[17] Rzadca K, Seredynshi F. Heterogeneous multiprocessor scheduling withdifferential evolution. In: Proceedings of congress on evolutionary computa-tion, 2005. p. 2840–7.
[18] Feoktistov V, Janaqi S. Generalization of the strategies in differentialevolution. In: Proceedings of the 18th international parallel and distributedprocessing symposium, 2004. p. 165–70.
[19] Paterlini S, Krink T. High performance clustering with differential evolution.In: Proceedings of the IEEE congress on evolutionary computation, vol. 2,2004. p. 2004–11.
[20] Karaboga D, Okdem S. A simple and global optimization algorithm forengineering problems: differential evolution algorithm. Turkish Journal ofElectrical Engineering 2004;12(1):53–60.
[21] Xue F, Sanderson A, Graves R. Pareto-based multi-objective differentialevolution. In: Proceedings of the IEEE congress on evolutionary computation,vol. 2, 2003. p. 862–9.
[22] Omran M, Engelbrecht A, Salman A. Differential evolution methods forunsupervised image classification. In: Proceedings of the IEEE congress onevolutionary computation, vol. 2, 2005. p. 966–73.
[23] Storn R. Differential evolution design for an iir-filter with requirements formagnitude and group delay. Technical report TR 95-026, InternationalComputer Science Institute, Berkeley, CA; 1995.
[24] Babu B, Angira R. Optimization of non-linear functions using evolutionarycomputation. In: Proceedings of the 12th ISME international conference onmechanical engineering, India, 2001. p. 153–7.
[25] Angira R, Babu B. Evolutionary computation for global optimization of non-linear chemical engineering processes. In: Proceedings of InternationalSymposium on Process Systems Engineering and Control, Mumbai, 2003.p. 87–91.
[26] Abbass H (editor). A memetic pareto evolutionary approach to artificialneural networks. Lecture notes in artificial intelligence, vol. 2256. Berlin,Germany: Springer-Verlag; 2002.
[27] Babu B, Jehan M. Differential evolution for multi-objective optimization. In:Proceedings of the IEEE congress on evolutionary computation, vol. 4, 2003.p. 2696–703.
[28] Price K, Storn R. De web site, 2005. URL /http://www.ICSI.Berkeley.edu/�storn/code.htmlS.
[29] Storn R. On the usage of differential evolution for function optimization. In:The North American fuzzy information processing society conference,Berkeley, 1996. p. 519–23.
[30] Salman AA, Mehrotra K, Mohan CK. Adaptive linkage crossover. In: Proceedingsof ACM symposium on applied computing, 1998. p. 338–42.
[31] Salman AA, Mohan CK. Linkage crossover operator for genetic algorithms.PhD thesis, Syracuse University, Syracuse, NY; 1999.
[32] Tasgetiren MF, Pan Q-K, Suganthan PN, Liang Y-C. A discrete differentialevolution algorithm for the no-wait flowshop scheduling problem with totalflowtime criterion. In: Proceedings of the 2007 IEEE symposium oncomputational intelligence in scheduling, 2007. p. 338–42.