Framework for Residual-Based Error Estimation in ...powers/vv.presentations/roy.pdf · Estimation...
18
Framework for Residual-Based Error Estimation in Computational Fluid Dynamics Christopher J. Roy Aerospace and Ocean Engineering Dept. Virginia Tech [email protected] V&V Workshop University of Notre Dame October 18, 2011
Transcript of Framework for Residual-Based Error Estimation in ...powers/vv.presentations/roy.pdf · Estimation...

Framework for Residual-Based Error
Estimation in Computational Fluid
Dynamics
Christopher J. Roy
Aerospace and Ocean Engineering Dept.
Virginia Tech
V&V Workshop
University of Notre Dame
October 18, 2011

Discretization Error (DE) is the numerical error due to the
mesh and time step used in the numerical scheme
• Usually the largest numerical error and most difficult to estimate
• Defined as numerical solution minus PDE solution:
Richardson extrapolation is the most commonly used DE
estimator for finite difference and finite volume methods
• Requires solutions on 2 (or 3) systematically refined grids
• Refinement factors of two often used, esp. for unstructured grids
• Advantage: easy to implement – post processes solutions
• Drawbacks:
– Fine grid solutions can be expensive to compute
– Solutions on all grids used must be asymptotic
Motivation
2
uuhh~

Example problem: 1D steady Burgers’ equation
• PDE (strong) form:
• Governing equation (PDE or integral eqn.):
• Discrete equation (FDM or FVM):
• Since the PDE operates on a continuous function, and the
discrete solutions exist only at nodes or cell centers, we
will use the following interpolation ( I ) operators
– Prolongation of uh to a continuous space:
– Restriction of to mesh h:
Governing Equation
and Notation
3
0)~( uL
02
2
dx
ud
dx
udu
0)( hh uL
u~ uI h ~
hh uI

Consider steady Burgers equation:
Use a simple 2nd order accurate finite difference equation
Taylor series expansions (TSEs) for ui+1 and ui-1 about ui
Truncation Error Analysis
0~~
~)~(2
2
dx
ud
dx
uduuL
02
2)(
2
1111
x
uuu
x
uuuuL iiiii
ihh
54
4
43
3
32
2
2
12462
xOx
dx
udx
dx
udx
dx
udx
dx
duuu
iiii
ii
54
4
43
3
32
2
2
12462
xOx
dx
udx
dx
udx
dx
udx
dx
duuu
iiii
ii
4

Plugging in these TSEs and rearranging gives:
Lh(u) L(u) Truncation Error, TEh(u)
This is the Generalized Truncation Error Expression (GTEE)*
This expression holds for any sufficiently smooth function
• Discrete DE:
• Continuous DE:
Generalized Truncation
Error Expression
42
3
32
4
4
2
2
2
1111
612
2
2xO
x
dx
udu
x
dx
ud
dx
ud
dx
duu
x
uuu
x
uuu
i
i
iii
iiiiii
i
5
)~()~()~( wTEwLIwIL h
hh
h
*Roy, C. J. (2009). “Strategies for Driving Mesh Adaptation in CFD (Invited),” AIAA Paper
2009-1302, 47th AIAA Aerospace Sciences Meeting, Orlando, FL, January 5-8, 2009.
2nd Order
w~
uIu h
hh~
uuI hh~

GTEE:
• Plugging in the numerical solution gives:
Continuous Residual
– Similar to the finite element residual
– Requires prolongation of uh to a continuous space for
FDM and FVM
• Plugging in the exact solution to the PDEs gives:
Discrete Residual
Relationship between
Residuals and TE
6
)()()( uTEuLIuIL h
hh
h
)~()~( uTEuIL h
h
h
)()( hhhhh
h uITEuILI
hhuI

We will examine the following residual-based DE
estimators for finite difference and finite volume
methods (most commonly used for CFD)
• DE transport equations
• Defect correction
• Adjoint methods (time permitting)
All three have both continuous and discrete
formulations
Residual-Based DE Estimation
7

GTEE
The discrete DE transport equation can be found by
inserting into the GTEE and subtracting
• If the equations are linear*:
• Discrete DE transport equation:
– Burgers’ eqn.:
– LHS describes the transport of DE
– RHS shows that the TE is the local source for the DE
– We have also developed an advanced linearization approach*
Discrete DE
Transport Equation
8
)~()~()( uTEuILuL hhhhh
)~()~()( uIuLuILuL h
hh
h
hhh
)~()( uTEL hhh
)~(2
2 2
1111 uTExx
u hiiiii
i
)()()( uTEuLIuIL h
hh
h
0)( hh uL
*Phillips, T. S. and Roy, C. J. (2011). “Residual Methods for Discretization Error
Estimation,” AIAA Paper 2011-3870, 20th AIAA CFD Conference, Honolulu, HI.
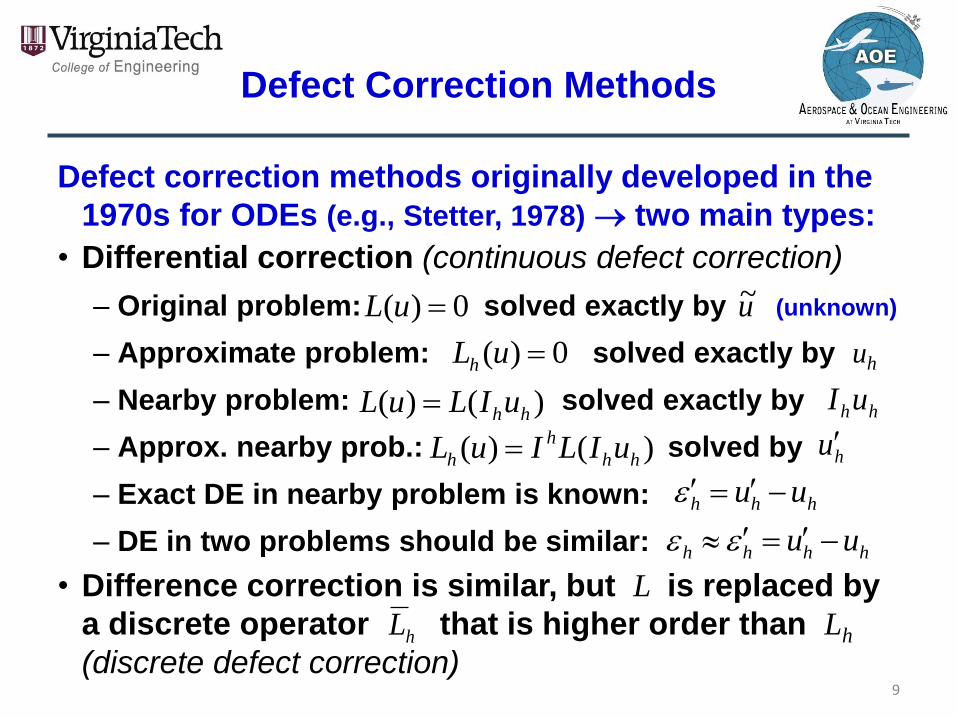
Defect correction methods originally developed in the
1970s for ODEs (e.g., Stetter, 1978) two main types:
• Differential correction (continuous defect correction)
– Original problem: solved exactly by (unknown)
– Approximate problem: solved exactly by uh
– Nearby problem: solved exactly by
– Approx. nearby prob.: solved by
– Exact DE in nearby problem is known:
– DE in two problems should be similar:
• Difference correction is similar, but L is replaced by
a discrete operator that is higher order than Lh
(discrete defect correction)
Defect Correction Methods
9
0)( uLh
0)( uL u~
)()( hhuILuL
)()( hh
h
h uILIuL hu
hhh uu
hhhh uu
hL
hhuI
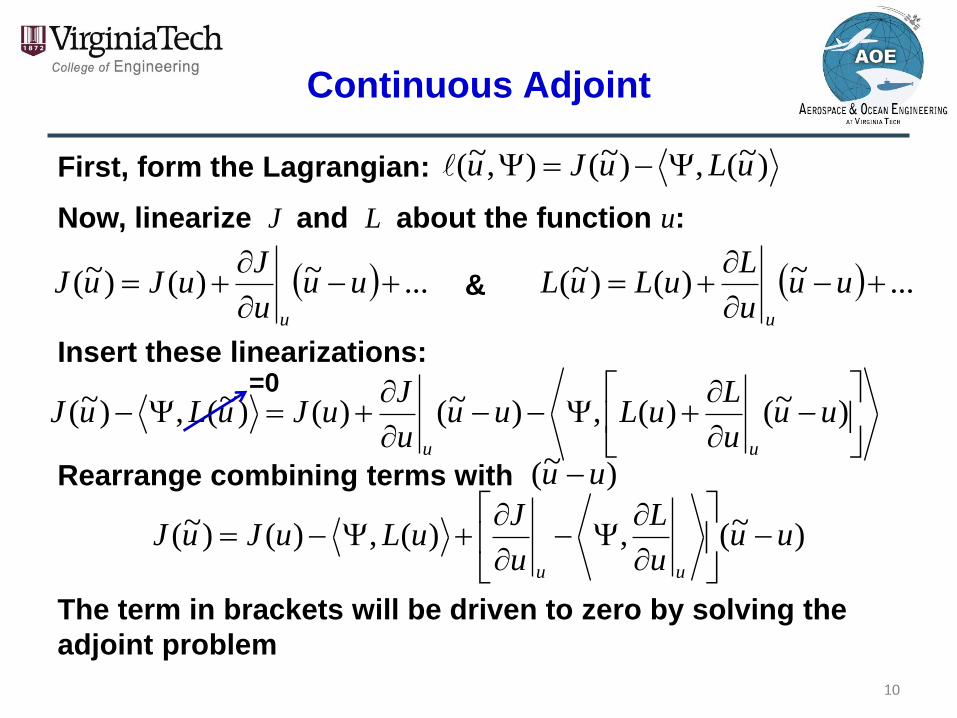
First, form the Lagrangian:
Now, linearize J and L about the function u:
&
Insert these linearizations:
Rearrange combining terms with
The term in brackets will be driven to zero by solving the
adjoint problem
Continuous Adjoint
)~(,)~(),~( uLuJu
...~)()~(
uu
u
JuJuJ
u
...~)()~(
uu
u
LuLuL
u
)~()(,)~()()~(,)~( uu
u
LuLuu
u
JuJuLuJ
uu
=0
)~(,)(,)()~( uuu
L
u
JuLuJuJ
uu
)~( uu
10
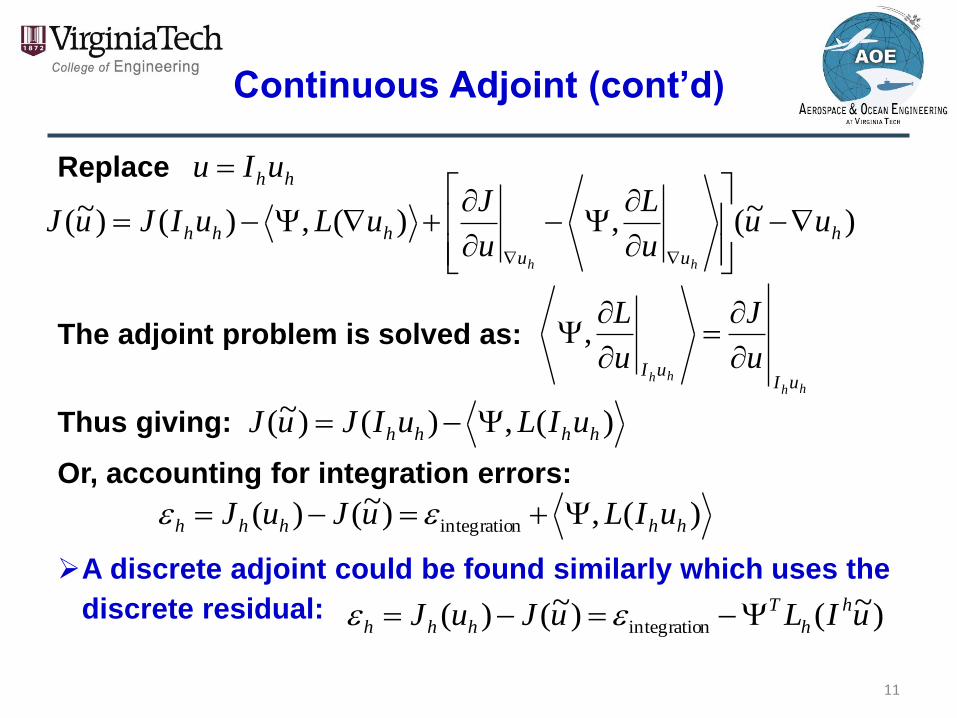
Replace
The adjoint problem is solved as:
Thus giving:
Or, accounting for integration errors:
A discrete adjoint could be found similarly which uses the
discrete residual:
Continuous Adjoint (cont’d)
)~(,)(,)()~( h
uu
hhh uuu
L
u
JuLuIJuJ
hh
hhuIu
hhhh uI
uI u
J
u
L
,
)(,)()~( hhhh uILuIJuJ
)(,)~()( nintegratio hhhhh uILuJuJ
)~()~()( nintegratio uILuJuJ h
h
T
hhh
11
The reliability of ALL DE estimators depends on the
numerical solution(s) being in the asymptotic range
• Need to compute the observed order of accuracy
• Given solutions on two systematically-refined meshes by
the factor r, the observed order of accuracy for residual-
based methods is given by (e.g.):
Functionals:
(scalars):
The observed order of accuracy will only match the formal
order when both solutions are asymptotic
Richardson extrap. requires three asymptotic solutions
Reliability of DE Estimates
12
rp h
rh
ln
ln
ˆ

1D Burgers equation for a steady, viscous shock wave
Equation: Exact Sol.:
• Explicit, finite-difference discretization on uniform mesh
• We will examine
– Richardson extrapolation
– Continuous DETE*
– Discrete DETE*
– Defect correction
*simple and advanced
linearizations
Example: Burgers’ Equation
13
02
2
dx
ud
dx
duu
L
xxu
2
Retanh2)(~

33 Nodes 65 Nodes
Results*: Burgers’ Equation
Reynolds Number = 32
14
x (m)
Dis
cre
tiza
tio
nE
rro
r(m
/s)
-1.5 -1 -0.5 0
0
0.05
0.1
Richardson Extrapolation
Continuous DETE (simple)
Discrete DETE (simple)
Continuous DETE
Discrete DETE
Defect Correction
True Error
Reynolds Number = 32, 33 Nodes
x (m)
Dis
cre
tiza
tio
nE
rro
r(m
/s)
-1.5 -1 -0.5 0
0
0.01
0.02
Richardson Extrapolation
Continuous DETE (simple)
Discrete DETE (simple)
Continuous DETE
Discrete DETE
Defect Correction
True Error
Reynolds Number = 32, 65 Nodes
*C. J. Roy, “Survey of Residual-based Methods for Estimating Discretization Error
(Invited),” American Nuclear Society: 2010 Winter Meeting and Nuclear Technology
Expo, November 7-11, 2010, Las Vegas, Nevada
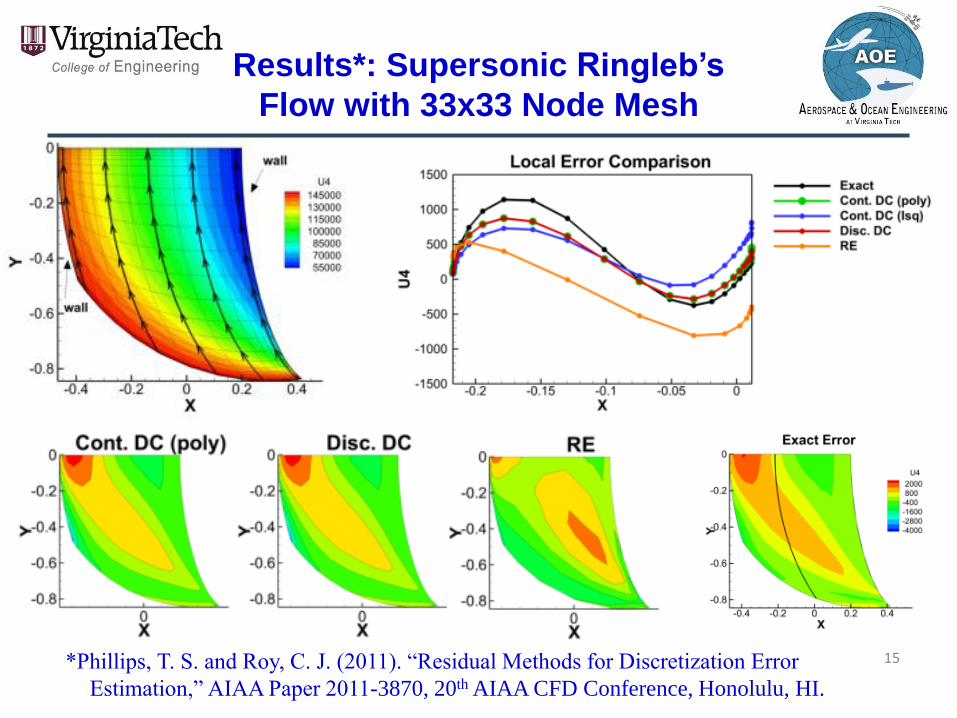
Results*: Supersonic Ringleb’s
Flow with 33x33 Node Mesh
15 *Phillips, T. S. and Roy, C. J. (2011). “Residual Methods for Discretization Error
Estimation,” AIAA Paper 2011-3870, 20th AIAA CFD Conference, Honolulu, HI.
• A framework was presented for developing residual-based
DE estimators in FDM and FVM
• The framework is based on the GTEE which relates the
discrete equations to the PDE/integral equations in a
general manner through the truncation error (TE)
• Assessing the reliability of DE estimators requires at least
two systematically-refined grids to demonstrate that the
solutions are asymptotic
• Simple example problem: Burgers’ equation
– Residual-based methods performed better than Richardson
extrapolation near the asymptotic range
– Not surprising since they require only a single grid and they
also use additional information about the problem
Conclusions
16

I would like to thank my graduate students Tyrone
Phillips, Aniruddha Choudhary, and Joe Derlaga for
their contributions to this residual-based DE
framework
This work was partially supported by Sandia National
Laboratories under a Presidential Early Career Award
for Scientists and Engineers (PECASE).
Acknowledgments
17

Questions???
18