
Fractional order tension control for stable and fast tethered satellite retrieval
25
Author's Accepted Manuscript Fractional order tension control for stable and fast tethered satellite retrieval Guanghui Sun, Z.H. Zhu PII: S0094-5765(14)00319-1 DOI: http://dx.doi.org/10.1016/j.actaastro.2014.08.012 Reference: AA5174 To appear in: Acta Astronautica Received date: 7 March 2014 Revised date: 11 August 2014 Accepted date: 15 August 2014 Cite this article as: Guanghui Sun, Z.H. Zhu, Fractional order tension control for stable and fast tethered satellite retrieval, Acta Astronautica, http://dx.doi.org/ 10.1016/j.actaastro.2014.08.012 This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting galley proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain. www.elsevier.com/locate/actaastro
Transcript of Fractional order tension control for stable and fast tethered satellite retrieval

Author's Accepted Manuscript
Fractional order tension control for stable andfast tethered satellite retrieval
Guanghui Sun, Z.H. Zhu
PII: S0094-5765(14)00319-1DOI: http://dx.doi.org/10.1016/j.actaastro.2014.08.012Reference: AA5174
To appear in: Acta Astronautica
Received date: 7 March 2014Revised date: 11 August 2014Accepted date: 15 August 2014
Cite this article as: Guanghui Sun, Z.H. Zhu, Fractional order tension controlfor stable and fast tethered satellite retrieval, Acta Astronautica, http://dx.doi.org/10.1016/j.actaastro.2014.08.012
This is a PDF file of an unedited manuscript that has been accepted forpublication. As a service to our customers we are providing this early version ofthe manuscript. The manuscript will undergo copyediting, typesetting, andreview of the resulting galley proof before it is published in its final citable form.Please note that during the production process errors may be discovered whichcould affect the content, and all legal disclaimers that apply to the journalpertain.
www.elsevier.com/locate/actaastro

1
Fractional Order Tension Control for Stable and Fast Tethered Satellite Retrieval
Guanghui Sun1,2 and Z. H. Zhu1*
1School of Astronautics, Harbin Institute of Technology
92 Xidazhi St., Harbin, Heilongjiang, 150001, China
2 Department of Earth and Space Science and Engineering, York University
4700 Keele Street, Toronto, Ontario, M3J 1P3, Canada
* Corresponding Author: Email: [email protected]. Tel: +1 416 7362100 x 77729.
Abstract
The retrieval of a tethered satellite system is intrinsically unstable. This paper develops a new control strategy to retrieve the tethered satellite system stably and quickly using the fractional order control theory. The governing equation of the tethered satellite system and classic linear feedback tension control law were first reviewed and examined as a benchmark. Then, a new fractional order tension control law has been to avoid the tethered satellite winds around the main satellite near the end of retrieval by existing integer order tension control laws. The newly proposed control law has been discretized and implemented by the Laplace transform and Tustin operator. Unlike the existing integer order control laws, which are based on the feedback of current state and memoryless, the fractional order control law has the memory of previous states and thus controls the tether retrieval more smoothly while maintaining the retrieving speed. The effectiveness and advantage of the new fractional order tension control law is demonstrated numerically by comparing with its integer order counterpart. The results show that the new control law not only retrieves the subsatellite without winding around the main satellite, but also provides a better control performance with smaller in‐plane libration angles.
Keywords: Tethered satellite; Retrieval; Fractional order; Tension control; Dynamics
1. INTRODUCTION
The past decades have witnessed 26 tethered satellite missions [1] due to its great potential in
space exploration, microgravity and upper atmospheric studies, electrodynamic propulsion and
* Corresponding Author: Email: [email protected]. Tel: +1 416 7362100 x 77729.

2
deep space observation [2-4]. A typical tethered satellite mission generally involves tether
deployment, state keeping, and tether retrieval, where the tether deployment and retrieval are the
most critical stages [2, 5-6]. The deployment process is generally stable due to the stabilizing
effect of gravity gradient field and can be controlled by an open-loop and linear-exponential
control law [7]. In contrast, the retrieval process is inherently unstable [8], especially as the
subsatellite approaches to the main satellite. Many control methods have been proposed to
retrieve the tethered satellite in a stable and fast manner in the past decades, such as tension
feedback control strategy to retrieve the tether with a windlass mechanism [9, 10], open-loop
control strategy to retrieve the tether uniformly or exponentially [7], optimal controls [10],
delayed feedback controls [11], and others [12,13]. Among them, the tension control is most
appealing due to its simplicity, effectiveness, and implementability [14].
The tension control law was first introduced by Rupp [9], where the tether tension was
regulated by a predetermined control law to retrieve the subsatellite to the required length while
keeping the tether libration as small as possible. Baker et al. [15] applied the tension control law
to control the out-of-plane libration through the higher-order modal coupling between the in-
plane and out-of-plane libration modes. Pradeep [16] developed a simple tension control law
based on the linearization of the equation of in-plane motion of tether in the neighborhood of a
system stationary point using the KTC (Kelvin-Talt-Chetayev) theorem for in-plane libration
control. Kumar and Pradeep [17] generalized the Pradeep’s simple tension control law to three-
dimensional tethered satellite systems. Modi et al. [18] derived a nonlinear feedback control law
that included the out-of-plane tether angular velocity to eliminate the librations. Liaw and Abed
[19] proposed a controller based on the Hopf bifurcation theorem. Licata [20] studied a fuzzy
logic feedback tension control scheme for the in-plane tether deployment. A detailed review can
3
be found in [21]. Although effective, the existing control schemes cannot achieve the stable and
fast retrieval of tethered subsatellite simultaneously. To achieve the balance between the stability
and efficiency of retrieval, a memory feedback control is highly desirable to automatically adjust
the control performance based on its time history.
Fractional order calculus possesses the historical memory capacity by generalizing the
classical integer order differential and integral calculus to a non-integer order combined
differentiation/integration operator, called differintegral. It dates back to the birth of classical
integer order calculus, but received little attention due to the inherent mathematic complexity and
lack of clear physical meaning. Over the past decades, it has been observed that many physical
systems can be described more accurately by the fractional order calculus than the classical
calculus due to its unique historical memory capacity, for instance, the viscoelastic systems [22],
polymeric chemistry systems [23], biomedical systems [24], and signal processing [25], just to
name a few. In the field of dynamics and control, Fractional Order Control (FOC) theory attracts
great interest since it can provide a better and robust performance for a closed-loop control
system. Over the years, many effective FOC methods have been proposed, such as the CRONE
(Crontrôle Robuste d'Ordre Non Entier) strategy [26], fractional PI Dλ μ controller [27], and
fractional order lead-lag compensators [28]. To the authors' best knowledge, no attempt has been
made in the literature to control the retrieval of tethered satellites by the FOC theory.
In this paper, a new fractional order tension control law is proposed for the retrieval of
tethered satellites. The nonlinear tether dynamics is linearized in the neighborhood of a given
equilibrium point. By introducing the linear tension feedback and fractional order items, the
linearized dynamic equations become asymptotically stable. Compared to the exiting tension
control law, the main advantages of the proposed fractional order tension control law are: (i) a

4
better control strategy to overcome the instability experienced by the integer order tension
control laws; (ii) a faster retrieval than its integer order counterparts, (iii) a high efficiency and
real-time control law that requires less feedback and is easy to implement in engineer
applications.
The paper is organized in five sections. Following this brief Introduction, Section 2 provides
some theoretical background of the dynamics of tethered satellites and basic concepts for the
fractional order calculus. In Section 3, the fractional order control law is derived in terms of
stability analysis and model discretization. The simulation results and discussion are presented in
Section 4. Finally, Section 5 concludes the paper.
2. THEORETICAL BACKGROUND
2.1 Dynamics of tethered satellite system
A tethered satellite system (TSS) usually consists of a long and thin tether connecting two
satellites at its ends. Generally, the TSS can be modeled in five categories [21] depending on the
level of details required in analysis. To focus our attention on the control strategy, it is assumed
that the tether is straight and inextensible and its mass is negligible compared to the main
satellite. Due to the large ratio of tether length over satellites’ dimensions, the satellites are
modeled as lumped masses attached to the ends of the tether. Moreover, the center of mass of the
TSS is assumed to reside in the main satellite throughout the whole retrieval process. Based upon
the assumptions, the TSS motion can be safely decomposed into the orbital motion of the main
satellite around the Earth and the local libration motion of tether about the main satellite, as
shown in Fig. 1. It is assumed that the TSS orbits the Earth in in a circular orbit and there is no
thruster at the subsatellite. Then, a local orbital reference frame is defined with the origin at the
main satellite. The y-axis of the orbital frame points toward the Earth center. The x-axis lies in

5
the orbital plane perpendicular to the y-axis and pointing towards the moving direction of main
satellite. The z-axis completes a right-hand coordinate system.
θϕ
x
y
z
Main satellite
Subsatellite
Earth
Figure 1. The local orbital reference frame of TSS.
Thus, the equations of motion of the TSS without thrust at the subsatellite can be expressed as
per [12]:
2 2 2 2 2 2 2
2
2 2 2
[ cos ( ) 3 cos cos ] /
2[( / ) tan ]( ) 3 cos sin 0
2( / ) cos sin [( ) 3 cos ] 0
l l T m
l l
l l
ϕ ϕ θ ϕ θ
θ ϕ ϕ θ θ θ
ϕ ϕ ϕ ϕ θ θ
− + + Ω − Ω + Ω = −
+ − + Ω + Ω =
+ + + Ω + Ω =
(1)
where l is the instant tether length, m is the mass of subsatellite, T is the tension in tether, Ω is
the orbit rate of the TSS, θ and φ are the in-plane and out-of-plane libration angles, respectively.
The dot denotes the derivative with respect to time.
Introduce the following dimensionless variables
2ˆ, / , / [ ]t l L T T m Lτ λ= Ω = = Ω (2)
Equation (1) can be rewritten in the dimensionless form,

6
2 2 2 2 2
2 2
ˆ" [ ' cos (1 ') 1 3cos cos ]" 2[( '/ ) ' tan ](1 ') 3cos sin 0" 2( '/ ) ' cos sin [(1 ') 3cos ] 0
Tλ λ ϕ ϕ θ θ ϕθ λ λ ϕ ϕ θ θ θ
ϕ λ λ ϕ ϕ ϕ θ θ
− + + − + = −+ − + + =
+ + + + =
(3)
where L is the total length of tether before retrieval and the prime denotes the dimensionless time
derivative. T̂ is the dimensionless tether tension and will be the designed control input in the tension control law. Obviously, this is a single‐input‐multiple‐output system and the libration angles cannot be controlled directly by the tension. Instead, they are controlled indirectly through the nonlinear modal
coupling. Equation (3) shows clearly that the term ( '/ )(1 ')λ λ θ+ is for the coupling between the
tension and in‐plane libration while the term ( '/ ) 'λ λ ϕ is for the coupling between the tension and out‐
of‐plane libration. It is noted that the coupling between the tension and out‐of‐plane libration mode is much weaker (one order higher) than the in‐plane libration mode.
Redefine the new variables as 1 2 3 4 5 6, ', , ', , 'x x x x x xλ λ θ θ ϕ ϕ= = = = = = , Eq. (3) is
transformed into a set of first order differential equations, such that,
( )
( )
1 2
2 2 2 2 22 1 6 1 4 5 1 1 5 3
3 4
4 2 1 6 5 4 3 3
5 6
2 26 2 1 6 5 5 4 3
'ˆ' (1 ) cos 3 cos cos
'
' 2 tan (1 ) 3cos sin
'
' 2 cos sin (1 ) 3cos
x x
x x x x x x x x x x Tx x
x x x x x x x x
x x
x x x x x x x x
=
= + + − + −
=
= − − + −⎡ ⎤⎣ ⎦=
⎡ ⎤= − − + +⎣ ⎦
(4)
Assume the TSS system is in equilibrium at any point between the completely retrieved and fully
deployed states, such that, 1 2 3 4 5 6, 0x a x x x x x= = = = = = with0 1a< ≤ , where a = 1 or 0 means
the tethered satellite is fully deployed or completely retrieved. Change the original of coordinates to the
equilibrium point by defining new coordinates as 1 1 ,y x a= − 2 2 ,y x= 3 3 4 4, ,y x y x= = 5 5 6 6,y x y x= =
. Then, Eq. (4) becomes
1 2
2 2 2 2 22 1 6 1 4 5 1 1 5 3
3 4
24 6 5 4 3 3
1
5 6
2 226 6 5 5 4 3
1
'ˆ' ( ) ( )(1 ) cos ( ) 3( ) cos cos
'
' 2 tan (1 ) 3cos sin
'
' 2 cos sin (1 ) 3cos
y y
y y a y y a y y y a y a y y Ty y
yy y y y y yy a
y yyy y y y y yy a
=
= + + + + − + + + −
=
⎡ ⎤⎛ ⎞= − − + −⎜ ⎟⎢ ⎥+⎝ ⎠⎣ ⎦=
⎛ ⎞ ⎡ ⎤= − − + +⎜ ⎟ ⎣ ⎦+⎝ ⎠
(5)

7
Thus, the linearized form of Eq. (5) in the neighborhood of equilibrium
( 1 2 3 4 5 6 0y y y y y y= = = = = = ) becomes
1 1
2 2
3 3
4 4
5 5
6 6
0 1 0 0 0 0 0'3 0 0 2 0 0 ˆ' 30 0 0 1 0 0' 0
2' 0 3 0 0 0 0' 00 0 0 0 0 1' 00 0 0 0 4 0
y yay y a T
y yy y
ay yy y
⎡ ⎤ ⎧ ⎫⎧ ⎫ ⎧ ⎫⎢ ⎥ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ −⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥= +⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥− −⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭−⎢ ⎥⎣ ⎦
(6)
where the constant 3a is the static tension at the equilibrium.
2.2 Preliminaries of Fractional Order Calculus
The fractional order calculus has many different definitions for the fractional order
differintegral. Currently, there are three commonly used definitions in the literature: Riemann-
Liouville (R-L), Caputo and Grunwald-Letnikov (G-L). More details about the fractional order
calculus can be found in the Refs. [28-30]. In the current work, we adopt the Caputo definition of
the fractional order derivative, such that,
( )
10
1 ( )( ) , 1( ) ( )
nt
t n
fD f t d n nn t
αα
τ τ αα τ − += − < <
Γ − −∫ (7)
where α is a real number, n is a given integer number and ( )Γ • is the Gamma function defined as
1
0( ) x tx t e dt
∞ − −Γ = ∫ .
It is noted that the fractional order derivative of a function is related to not only the current state
( )nf t but also the previous states ( ),if t i n< . It indicates the fractional order derivative possesses
memory capacity. The stability of fractional order calculus is very important to its application in dynamics and control. Matignon pioneered in this area [31] by checking the condition of fractional order system stability by the poles of fractional order system in the complex plane of its pseudo‐state space. Subsequently, many stability conditions have been derived [32‐34], for instance, the Linear Matrix Inequality (LMI) condition for linear and time‐delay systems [32, 33], Mittag‐Leffler stability for

8
nonlinear fractional order systems [34] and so on. Depending on the system characteristics, there are two stability theorems for a fractional order system.
Theorem 1[31]: A commensurate transfer function F(s) = T(sα) / R(sα) with the order 0 < α <
1, where T and R are coprime polynomials, is Bounded-Input Bounded-Output stable if and only
if for every p∈C such that R(p) = 0:
arg( )2
p απ> (8)
Theorem 1 states that the stable region of a fractional order system is generally larger than its
integer order counterpart, see Fig. 2. The latter can be viewed as a special case with the order
1α = .
2απ
2απ
−
Figure. 2 The typical stable and unstable regions of a fractional order system.
Theorem 2 [33]: Given a non-commensurate fractional order system:
1
2
1 11 1 12 2 1
2 21 1 22 2 2
1 1 2 2
n
n n
n n
n n n nn n
D x c x c x c x
D x c x c x c x
D x c x c x c x
α
α
α
= + + +
= + + +
= + + +
(9)
with all fractional orders αi ∈ (0, 1], i = 0, 1, …, n. Let M be the lowest common multiplier of the
denominators ui, i = 0, 1, …, n, where the fractional order αi = vi /ui , i = 0, 1, …, n, (vi, ui) = 1

9
and vi, ui ∈ Z+. Set γ = 1/M, then the zero solution of Eq. (9) is global asymptotically stable if all
the roots ip of Eq. (10)
1
2
11 12 1
21 22 2
1 2
0
n
Mn
Mn
Mn n nn
p c c cc p c c
c c p c
α
α
α
− − −− − −
=
− − −
(10)
satisfies
arg( ) / 2ip γπ> (11)
3. CONTROL LAW FOR TETHERED SATELLITE RETRIEVAL
3.1 Simple Tension Control Law
As a benchmark for the effectiveness of the proposed fractional order tension control law, we
first derive a simple tension control law for retrieval as a baseline. Consider the governing
equation of the TSS in Eq. (5). The simplest tension control law in the literature has the following
form [17]
1 1 2 2 3 3 4 4 5 5 6 6 7T̂ k y k y k y k y k y k y k= + + + + + + (12)
where the parameters , 1, 2, ,7ik i = are the control gains to be determined by the stability
condition and control performance.
Substituting Eq. (12) into Eq. (6) leads to

10
1 11 2 3 4 5 6
2 2 7
3 3
4 4
5 5
6 6
0 1 0 0 0 0 0'3 2 ˆ' 3
0 0 0 1 0 0' 02' 0 3 0 0 0 0
' 00 0 0 0 0 1' 00 0 0 0 4 0
y yk k k a k k ky y a k T
y yy y
ay yy y
⎡ ⎤ ⎧ ⎫⎧ ⎫ ⎧ ⎫⎢ ⎥− − − − − − ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ − −⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥= +⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥− −⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭−⎢ ⎥⎣ ⎦
(13)
For the tether system in Eq. (13) to be stable at the equilibrium, there must be k7 = 3a and all
eigenvalues of Eq. (13) are located in the open left half-plane. The eigenfunction of Eq. (13) is
1 2 3 4 5 6
6 5 4 3 22 4 1 2 3 4 1 2 3 1
1 0 0 0 03 2
0 0 1 0 020 3 0 0
0 0 0 0 10 0 0 0 4
(8 2 / ) (7 2 / ) (7 8 / 7 ) (12 8 / ) 36 120
pk p k k k a k k
p
pa
pp
p k p k a k p k k a p k a k p k k a p k
−− + + −
−
−
= + + − + + − + − + + − − +
= (14)
It is interesting to note that the parameters k5 and k6 are not presented in the eigenfunction (14).
This implies that the stability is independent to the feedback gain k5 and k6. In other words, the
simple tension control law is completely decoupled from the out-of-plane mode in the
linearization process due to the high-order nonlinear coupling nature of the out-of-plane angle ϕ
with the other two variables ,λ θ is eliminated. Thus, an out-of-plane libration cannot be
controlled effectively alone by the tension feedback. Previous work showed that a thrust was
necessary to suppress the libration angle ϕ to zero quickly in Ref. [17]. It should be noted that

11
this limitation is due to the simple tension control strategy. Any control law based on this control
strategy will suffer the same limitation.
The stability condition of Eq. (13) can be expressed as per Routh-Hurwitz criterion
32 4 1 1
22
3 4 3 1 32 2 4 3 2 2
2
220; 1 0; 3 9 0;
4 2 46 412 0
kk k k ka ak
k k k k kk k k ka a a a a k
> − + + > − >
− + − − − > (15)
From Eq.(15), the stable ranges of (k1, k2) can be derived as k1 > 3 and k2 > 0, explicitly. The stable range of k3 can be determined as k3 = 0 by the KTC asymptotical stability theorem [17]. Substituting k3 = 0 into Eq. (15) leads to
( )4 112ak k< + (16)
Obviously, the k4 will approaches to zero as the tether is retrieved, i.e., a 0. For the sake of simplicity in constructing the tension control law, it is assumed k4 = 0 and k5 = k6 = 0 in the following work. Then, the simple tension control law for the tether retrieval becomes,
1 1 2 2 1 2ˆ 3 , with 3, 0, 0 1T k y k y a k k a= + + > > < ≤ (17)
By varying the parameter a from 1 to 0, the tether can be retrieved accordingly. It should be
noted that the simple tension control law cannot be used at a = 0 since the linearized system Eq.
(6) becomes singular. Furthermore, the simple tension control law is asymptotically stable at the
equilibrium point a due to the application of the KTC theorem and no limitation being imposed
on the magnitude of libration angle as the system approaching to the equilibrium. As a result, the
tether may wind around the main satellite when a 0, which will be a catastrophic failure. The
performance of the control law is illustrated numerically as follows.
Assume that the TSS is running in a circular orbit with 20km long tether at an altitude of
220km. The corresponding orbital rate is 31.1804 10 rad/s−× . To circumvent the singularity at a =

12
0, a small value (a = 0.02) is used instead in the analysis. The initial condition for retrieval is y1 =
1, y2 = 0, y3 = −0.02, y4 = 0, y5 = 0, y6 = 0.02, where the conditions y3 = −0.02 and y5 = 0.02 are
randomly selected to introduce an initial perturbation in libration angles. Furthermore, the
control gains (k1, k2) are optimized for the tethered satellite to be retrieved within two orbits, with
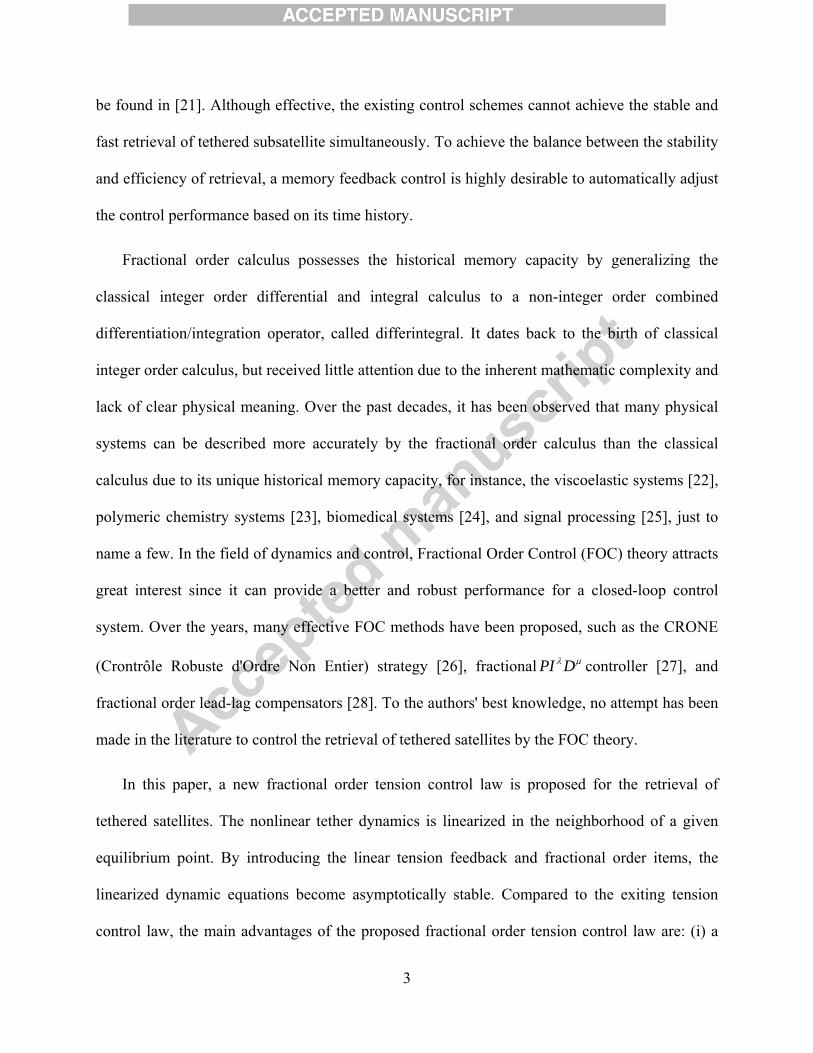
k1 = 4 and k2 = 2.8. The system responses are shown in Figs. 3-6. Figure 3 shows that the
subsatellite can be retrieved by the simple tension control law within three orbits. However, the
in-plane libration angle shown in Fig. 4 increases as the subsatellite approaches to the main
satellite. After one and half orbits, the tether length has been reduced to less than 5% of the total
length and the libration angle suddenly increases over 180°, which implies the tether wound
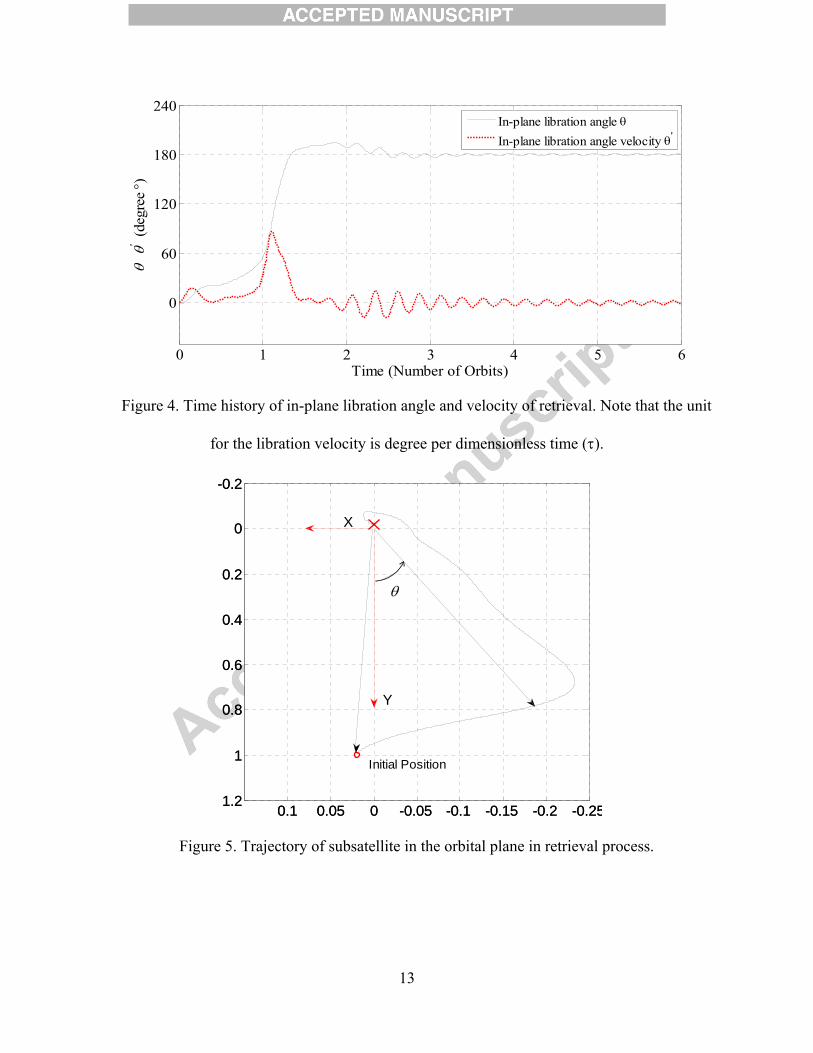
around the main satellite or the subsatellite hit the main satellite. This can be best illustrated by
the trajectory of the subsatellite in the orbital plane in Fig. 5, where the subsatellite starts to
wind around the main satellite when the tether length is very short. Moreover, Fig. 6 shows that
there is violent out-of-plane libration motion for the non-zero initial value 5 0.02y = . Such the
results are expected as discussed before.
0 1 2 3 4 5 6-0.5
0
0.5
1
Time (Number of Orbits)
λ
λ'
Tether length λ
Tether retrieving velocity λ'
Figure 3. Time history of dimensionless tether length and velocity in retrieval.
13
0 1 2 3 4 5 6
0
60
120
180
240
Time (Number of Orbits)
θ θ
' (de
gree
° )
In-plane libration angle θIn-plane libration angle velocity θ'
Figure 4. Time history of in-plane libration angle and velocity of retrieval. Note that the unit
for the libration velocity is degree per dimensionless time (τ).
-0.25-0.2-0.15-0.1-0.0500.050.1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Initial Position
X
Y
θ
-0.25-0.2-0.15-0.1-0.0500.050.1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Initial Position
X
Y
θ
Figure 5. Trajectory of subsatellite in the orbital plane in retrieval process.

14
0 1 2 3 4 5 6-100
-50
0
50
100
Time (Number of Orbits)
φ
φ' (deg
ree
° )
Out-of-plane libration angle φ
Out-of-plane libration angle velocity φ'
Figure 6. Time history of out-of-plane libration angle and velocity of retrieval. Note that the unit
for the libration velocity is degree per dimensionless time (τ).
3.2 New Fractional Order Tension Control Law
To retrieve the subsatellite stably and quickly, the existing control strategies commonly
employ two stage control laws: fast retrieval followed by slow retrieval after the tether is less
than 1% of its original length [35]. In the current work, a new fractional order tension control is
proposed, which is able to control the system performance with the information of previous
states. Based on the simple tension control law outlined above, the fractional order tension
control law is defined as follows,
2 2 1 1 2 2ˆ '+ 3T D y y k y k y aα= − + + (18)
where 2D yα is the Caputo definition of fractional order differential. Substituting Eq. (18) into (6)
leads to a non-commensurate fractional order system in the neighborhood of the equilibrium
point, such that,

15
1 1
2 21 2
3 3
4 4
5 5
6 6
' 0 1 0 0 0 03 0 0.04 0 0
' 0 0 0 1 0 0' 0 100 3 0 0 0' 0 0 0 0 0 1' 0 0 0 0 4 0
y yD y yk k
y yy yy yy y
α
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥− −⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎢ ⎥− −⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥
−⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭ ⎩ ⎭
(19)
Here, it is assumed a = 0.02 in order to avoid the singularity at a = 0. According to the Theorem
2, Eq. (19) can asymptotically approach to the equilibrium point for any given fractional order α
with properly selected values of ( 1 2,k k ). Furthermore, Theorem 1 indicates that the stable region
of a fractional order system is always larger than its integer order counterpart. Thus, we choose
the same values for ( 1 2,k k ) as in the integer order control law in Eq. (17) to satisfy the stability
condition instead of finding the eigenvalues of the fractional order system in Eq. (19). By
replacing the fractional order derivative with the fractional order integral, the fractional order
tension law is written as
12 2 1 2 2 2 1 2
ˆ '+4 2.8 0.06 '( 1)+4 2.8 0.06T D y y y y y I y y yα α−= − + + = − + + (20)
and
1 1
2 2
3 3
4 4
5 5
6 6
' 0 1 0 0 0 03 0 0 0.04 0 0
' 0 0 0 1 0 0' 0 100 3 0 0 0' 0 0 0 0 0 1' 0 0 0 0 4 0
y yD y y
y yy yy yy y
α
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎢ ⎥− −⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥
−⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭ ⎩ ⎭
(21)
where 1I α− denotes the fractional order integral operator satisfying 1 12 2( )D I y yα α− − = .
Next, we will develop a numerical procedure to implement the fraction order controller.
Assume the fractional order α = 0.05. The fraction order integral 1I α− in Eq. (21) can be

16
approximated by the Laplace transform and procedures in [36], such that,
{ }-7 2
0.952 0.95 -7 3 2
1 2.977 10 s +0.6159s+78.4811.1289 10 s +0.3793s +78.481s+1
L I ys
×= =
× (22)
The inclusion of the feedback of derivative y2' (acceleration) in Eq. (20) may lead to some
unwanted oscillations in the system responses. To avoid the possible oscillations, the Laplace
transform is modified by following item,
1 1
ssT s
←+
(23)
where T1 is the parameter to be determined by control requirement. In the current work, it is defined as T1 = 0.2.
Assume the sampling time step is Ts = 0.002, Eq. (22) is discretized by the Tustin operator
[37], 1
1
2 11s
zsT z
−
−
⎡ ⎤−= ⎢ ⎥+⎣ ⎦
, such that,
3 2
10.95 3 2
1 0.00151 0.00185 0.000832 0.0011730.6577 0.999 0.6567
z z zZs z z z
− + − −⎧ ⎫ ≈⎨ ⎬ − − +⎩ ⎭ (24)
Hence, the implementation procedure of the fractional order tension control law in Eq. (20) is established.
Using the same initial condition employed in the case of the integer order tension control law, the performance of the newly devised fractional order control law is shown in Figs. 7‐11 in comparison with its integer order counterpart. The solid lines denote the fractional order controller while the dotted lines represent the simple integer order tension controller. The results show that the fractional order control provides a more stable and fast retrieval than its integral order counterpart. The fractional order control works well even in the vicinity of singularity at a = 0.01. The tether length reduction is smoother with the fractional order controller as shown in Fig. 7. Figure 8 shows the maximum in‐plane libration angle is less than 17°. Figure 9 illustrates that, since the existence of the nonlinear coupling in the governing equation (5), the maximal value of out‐of‐plane libration (37°) is also smaller than that of the integer order tension control (42°), and approaches to zero more quickly. Figure 10 indicates the subsatellite is retrieved without the tether winding or hitting the main satellite when the tether length is short under the fractional order control. Finally, Figure 11 shows that the tether tension is also bounded in an acceptable region even though there are some oscillations in the initial stage of retrieval compared with the integer order tension controller.

17
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Time (Number of Orbits)
λ
0
0.01
0.02
0.03
0.04
0.05
Integer orderFractional order
Figure 7. Comparison of time history of dimensionless tether length with different control
laws for retrieval.
0 1 2 3 4 5 6
0
60
120
180
240
Time (Number of Orbits)
θ (
degr
ee ° )
Integer orderFractional order
Figure 8. Comparison of time history of in-plane libration angle with different control laws.

18
0 1 2 3 4 5 6
4040
20
-50-40
-20
0
50
Time (Number of Orbits)
φ (
degr
ee ° )
Integer orderFractional order
Figure 9. Comparison of time history of out-of-plane libration angle with different control
laws.
-0.25-0.2-0.15-0.1-0.0500.050.1
0.2
0
0.2
0.4
0.6
0.8
1
1.2
Integer orderFractional orderX
Y
Figure 10. Comparison of subsatellite trajectory in orbital plane with different control laws.

19
0 1 2 3 4 5 60
1
2
3
4
5
Time (Number of Orbits)
Integer orderFractional order
0
0.05
0.1
0.15
0.2
T̂
0 1 2 3 4 5 60
1
2
3
4
5
Time (Number of Orbits)
Integer orderFractional order
0
0.05
0.1
0.15
0.2
T̂T̂
Figure 11. Comparison of time history of tether tension with different control laws.
4. CONCLUSION
This paper investigates the stability control problem of the retrieval of a tethered satellite system, which is intrinsically unstable. The originality of the current work is to control the retrieval of a tethered satellite stably and quickly by a new fractional order tension control law. The governing equation of tethered satellite systems and classic linear feedback tension control law were firstly reviewed and examined as a benchmark test. The newly proposed fractional order control law is developed from its integer order counterpart to ensure the stability of the new control law conservatively. The new controller has been discretized and implemented by the Laplace transform and Tustin operator for practical application. Unlike with the classic integer order control law, which is based on the feedback of previous state and memoryless, the fractional order control law has the memory of previous states and thus controls the tether retrieval more smoothly while maintain the retrieving speed. It is noted that the simple linear tension control strategy is not effective in controlling the out‐of‐plane libration because the feedback of the states of that mode does not affect the stability of the tethered system. As expected, the linear fractional order tension control law, which is based on the same control strategy, is not effective in controlling the out‐of‐plane libration neither. The effectiveness and advantage of the new fractional order tension control law for in‐plan motion control is demonstrated numerically by comparisons with its integer order counterpart. It not only retrieves the subsatellite without winding around the main satellite, but also provides a better control performance with smaller in‐plane libration angles.

20
Acknowledgment
This work is supported by the Discovery Grant and the Discovery Accelerator Supplement Grant of the Natural Sciences and Engineering Research Council of Canada and partially supported by the National Natural Science Foundation of China (No. 61104112).
References
[1]. Zhu, Z. H., Zhong R., “Deorbiting dynamics of electrodynamic tether”, International
Journal of Aerospace and Lightweight Structures, Vol. 1, No. 1, 2011, pp. 47-66.
[2]. Cosmo, M. L., Lorenzini, E. C., Tethers in space handbook, 3nd ed., National Aeronautics
and Space Administration, 1997. pp:55-58.
[3]. Kumar, K.D., Yasaka, T., Sasaki, T., “Orbit transfer of service vehicle/payload through
tether retrieval”, Acta Astronautica, Vol.54, 2004, pp:687-698.
[4]. Sanmartin, J. R., Khan, S. B., Bombardelli, C.,Lorenzini, E. C. et al., “Propellantless
deorbiting of space debris by bare electrodynamic tethers”, 62nd International Astronautical
Congress 2011,Vol.3, 2011, pp:2239-2248.
[5]. Cai, Z., Li, X., Wu, Z., “Deployment and retrieval of a rotating triangular tethered satellite
formation near libration points”, Acta Astronautica, Vol. 98, No.1, 2014, pp:37-49.
[6]. Yu, B. S., Jin, D. P., “Deployment and retrieval of tethered satellite system under
J2 perturbation and heating effect”, Acta Astronautica, Vol. 67, No.7-8, 2010, pp:845-853.
[7]. Pascal, M., Djebli, A., El Bakkali, L., “Laws of deployment/retrieval in tether connected
satellites systems,” Acta Astronautica, Vol. 45, No. 2, 1999, pp:61-73.
[8]. Misra, A. K., “Dynamics and control of tethered satellite systems”, Acta Astronautica,
Vol.63, No.11-12, 2008, pp: 1169-1177.

21
[9]. Rupp, C. C., “A tether tension control law for tethered subsatellite deployment along local
vertical,” NASA TMX-64963, Sept. 1975.
[10]. Steindl, A, Steiner, W., Troger, H., “Optimal Control of Retrieval of a Tethered
Subsatellite,” IUTAM Symposium on Chaotic Dynamics and Control of Systems and Processes in
Mechanics Solid Mechanics and its Applications, Vol.122, 2005, pp:441-450.
[11]. Kojima,H., Sugimoto, T., “Stability analysis of in-plane and out-plane periodic motions of
electrodynamic tether system in inclined elliptic orbit,” Acta Astronautics, Vol. 65, No.3-4, pp.
477-488.
[12]. Fujii, H. A., Ishijima, S., “Mission function control of deployment/retrieval of a
subsatellite,” Journal of Guidance, Control, and Dynamics, Vol. 12, No. 2, 1989, pp. 243-247.
[13]. Liu, Y. Y., Zhou, J., Chen, H. L., “Variable structure control for tethered satellite fast
deployment and retrieval”, Lecture Notes in Electrical Engineering: Future Control and
Automation, Vol. 172, 2012, pp:157-16.
[14]. Donald, D.T., David, K. M., Carl, S. B., “Tethered satellite system control system design,”
3rd Tethers in Space/ Toward Flight International Conference, AIAA, San Francisco, USA,
1989, pp. 143-152.
[15]. Baker, W. P., Dunkin, J. A., Galaboff, Z. J., Johnston, K. D., Kissel, R. R., Rheinfurth, M.
H., Siebel, M. P. L., “Tether subsatellite study,” NASA TMX-73314, Mar. 1976.
[16]. Pradeep, S., “A new tension control law for deployment of tethered satellites,” Mechanics
Research Communication, Vol.24, No. 3, 1997, pp:247-254.
[17]. Kumar, K., and Pradeep, S., “Strategies for three dimensional deployment of tethered
satellites,” Mechanics Research Communications, Vol. 25, No. 5, 1998, pp. 543-550.

22
[18]. Modi, V. J., Chang-Fu, G., Misra, A. K., and Xu, D. M., “On the control of the space
shuttle based tether system,” Acta Astronautica, Vol. 9. No. 6-7, 1982, pp. 437-443.
[19]. Liaw, D., and Abed, E. H., “Stabilization of tethered satellites during station keeping,”
IEEE Transactions on Automatic Control, Vol. 35, No. 11, 1990, pp. 1186-1196.
[20]. Licata, R., “Tethered system deployment controls by feedback fuzzy logic,” Acta
Astronautica, Vol. 40, No. 9, 1997, pp. 619-634.
[21]. Williams, P., “A Review of Space Tether Technology,” Recent Patents on Space
Technology, Vol. 2, 2012, pp. 22-36.
[22]. Atanackovic, T. M., “On a distributed derivative model of a viscoelastic body”, Comptes
Rendus Mécanique, Vol. 331, No. 10, 2003, pp. 687-692.
[23]. Oldham, K. B., Spanier, J., The fractional calculus, Academic Press, New York & London,
1974.
[24]. Magin, R. L., “Fractional caculus in bioengineering: a tool to model complex dynamics,”
13th International Carpathian Control Conference, Kosice, 2012, pp. 464-469.
[25]. S. Das, I. Pan, Fractional Order Signal Processing, springer, 2012.
[26]. Oustaloup, A., Sabatier, J., Lanusse, P., Malti, R., Melchior, P., Moreau, X., Moze, M.,
“An overview of the CRONE approach in system analysis, modeling and identification,
observation and control”, Proceedings of the 17th world congress the international federation of
automatic control, Seoul, Korea, 2008, pp: 14254-14265.
[27]. Podlubny, I., “Fractional-order systems and PIλDμ controllers,” IEEE Transactions on
Automatic Control, Vol. 44, 1999,pp:208–214.
[28]. Monje, C. A., Chen, Y. Q., Vinagre, B. M., Xue, D.Y., Feliu-Batlle, V., Fractional order
systems and controls, Springer, 2010.

23
[29]. Podlubny, I., Fractional differential equations, Academic Press, 1999.
[30]. Kilbas, A. A. , Srivastava, H. M., Trujillo,J. J., Theory and application of fractional
differential equations, Elsevier, 2006.
[31]. Matignon, D., “Stability results for fractional differential equations with applications to
control processing,” In: Computational Engineering in Systems Applications, Lille, 1996,
pp:963-968.
[32]. Moze, M., Sabatier, J., “LMI tools for stability analysis of fractional systems,” in:
Proceedings of ASME 2005 IDET / CIE conferences, Long-Beach, 2005, pp. 1-9.
[33]. Deng, W. H., Li, C. P., Lü, J. H., “Stability analysis of linear fractional differential system
with multiple time delays,” Nonlinear Dynamics, Vol.48, No. 4, 2007, pp:409-416.
[34]. Li, Y., Chen, Y. Q., Podlubny, I., “Mittag–Leffler stability of fractional order nonlinear
dynamic systems,” Automatica, Vol. 45, No. 8, 2009, pp:1965-1969.
[35]. Zhong, R., Zhu, Z. H., “Dynamic analysis of deployment and Retrieval of tethered
satellites using a hybrid hinged-Rod tether model”, International Journal of Aerospace and
Lightweight Structures (IJALS), Vol. 1, No,2, 2012, pp: 239-259.
[36]. Charef, A., Sun, H. H., Tsao, Y. Y., Onaral, B., “Fractal system as represented by
singularity function,” IEEE Transactions on Automatic Control, Vol.37, No. 9, 1992, pp: 1465-
1470.
[37]. Chen Y. Q., Moore, K. L., “Discretization schemes for fractional-order differentiators and
integrators,” IEEE Transactions on Circuits and Systems I: Fundamental Theory and
Applications, Vol.49, No.3, 2002, pp:363-367.

24
• Study the stability of tethered satellite retrieval, which is intrinsically unstable
• Propose a new fractional order tension control law for stable tether retrieval
• Discretize and implement the control law by Laplace transform and Tustin operator
• Retrieved the subsatellite stable and fast without winding around the mainsatellite
• Achieved better control performance with smaller in‐plane libration angles


















